
Enhanced Black-Winged Kite Algorithm for Drone Coverage in Complex Fruit Farms



Abstract
1. Introduction
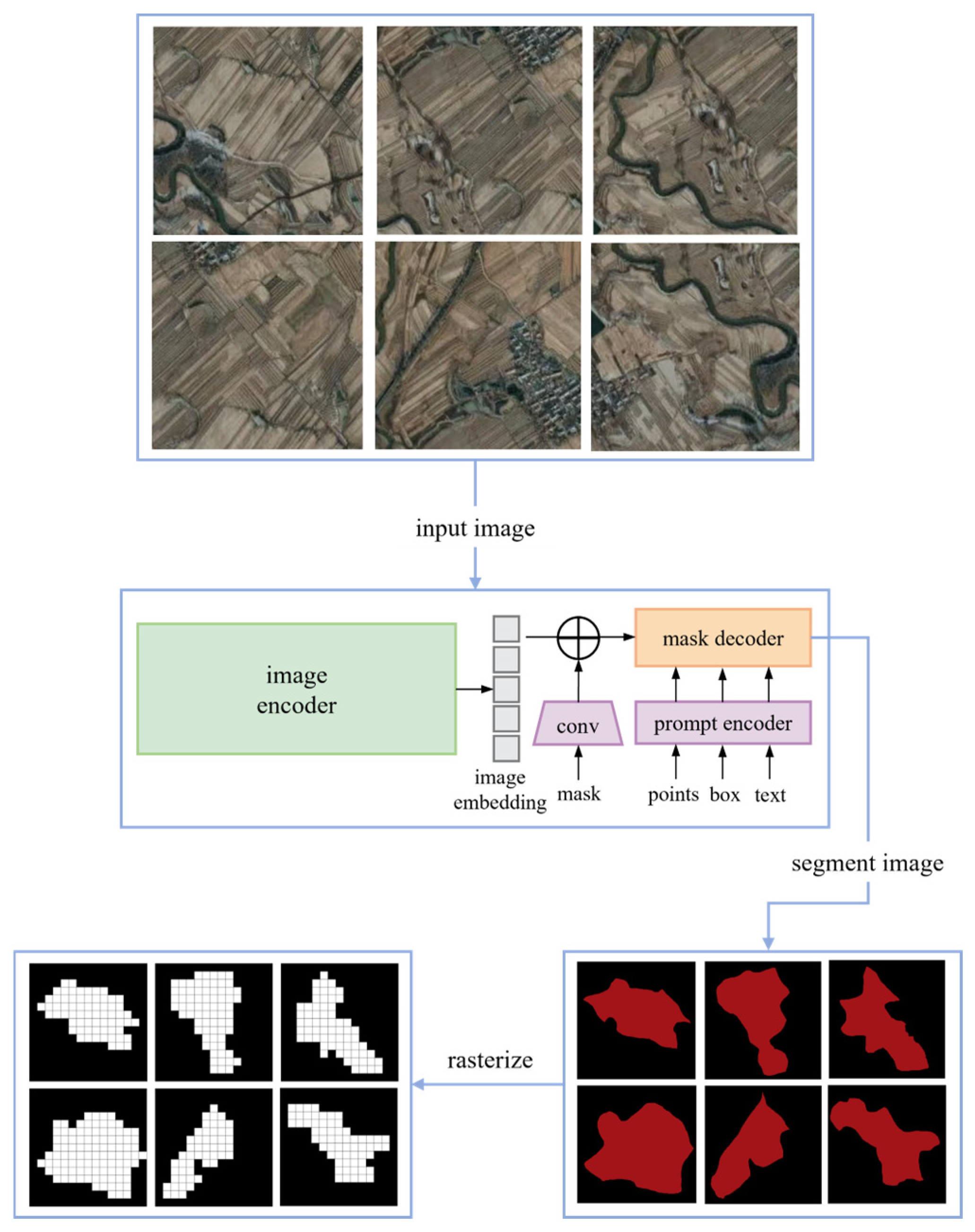
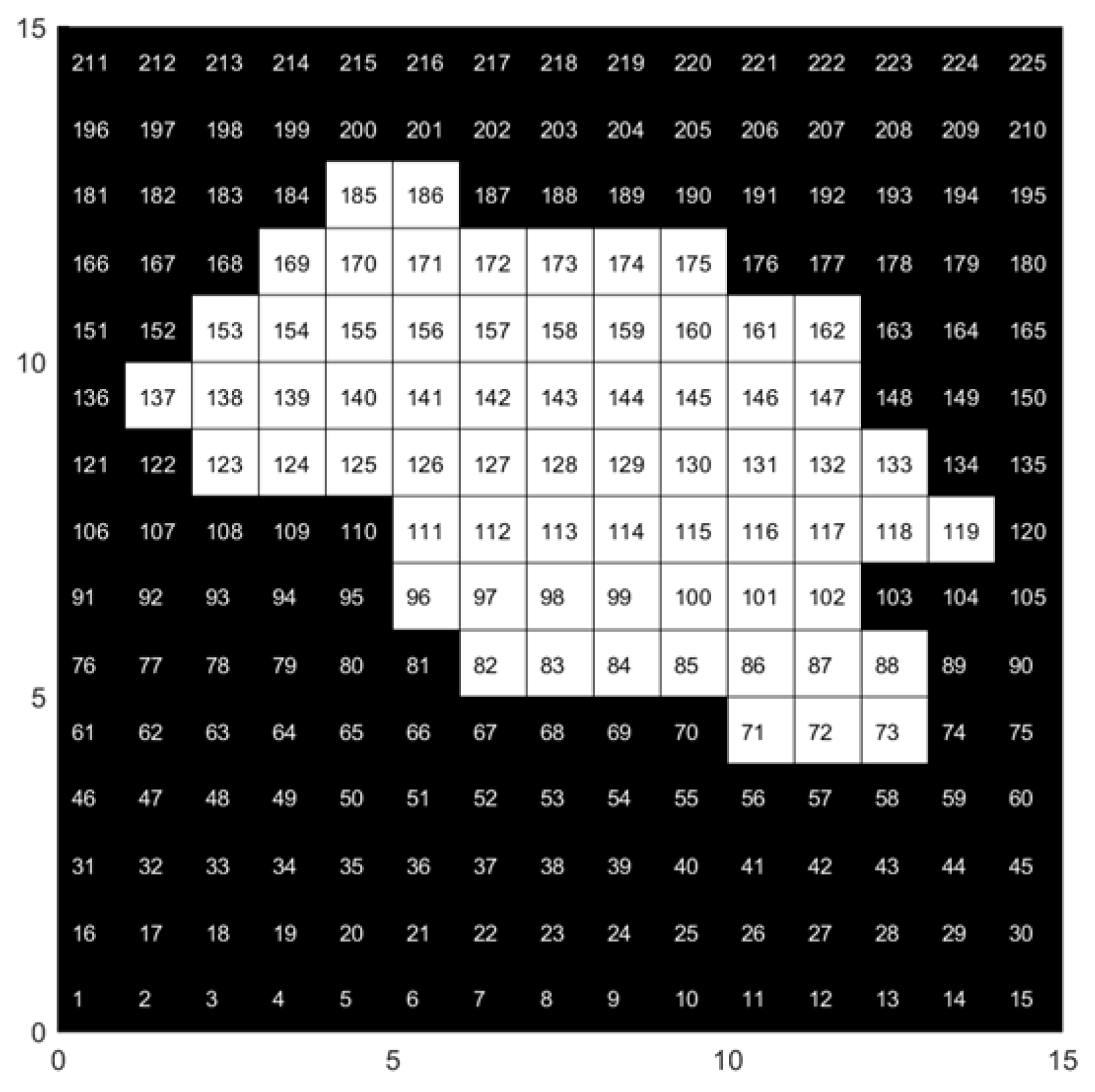
- Utilizing the deep learning SAM model to segment the task area in fruit farms and creating an environmental map via gridding;
- Designing a new objective function by constructing the coverage task cost functions, the flight safety cost function, and the path length cost function, thereby restructuring the drone coverage issue as an optimizing problem with multi-constraints;
- Proposing a DWBKA that incorporates a Dynamic Position Balancing strategy and a modified Whale Random Walk mechanism to avoid local optima traps and augment its global search capability;
- Developing a drone coverage approach anchored in the DWBKA algorithm to plan near-optimal pesticide spraying flight paths in complex fruit farm environments.
2. Materials and Methodology
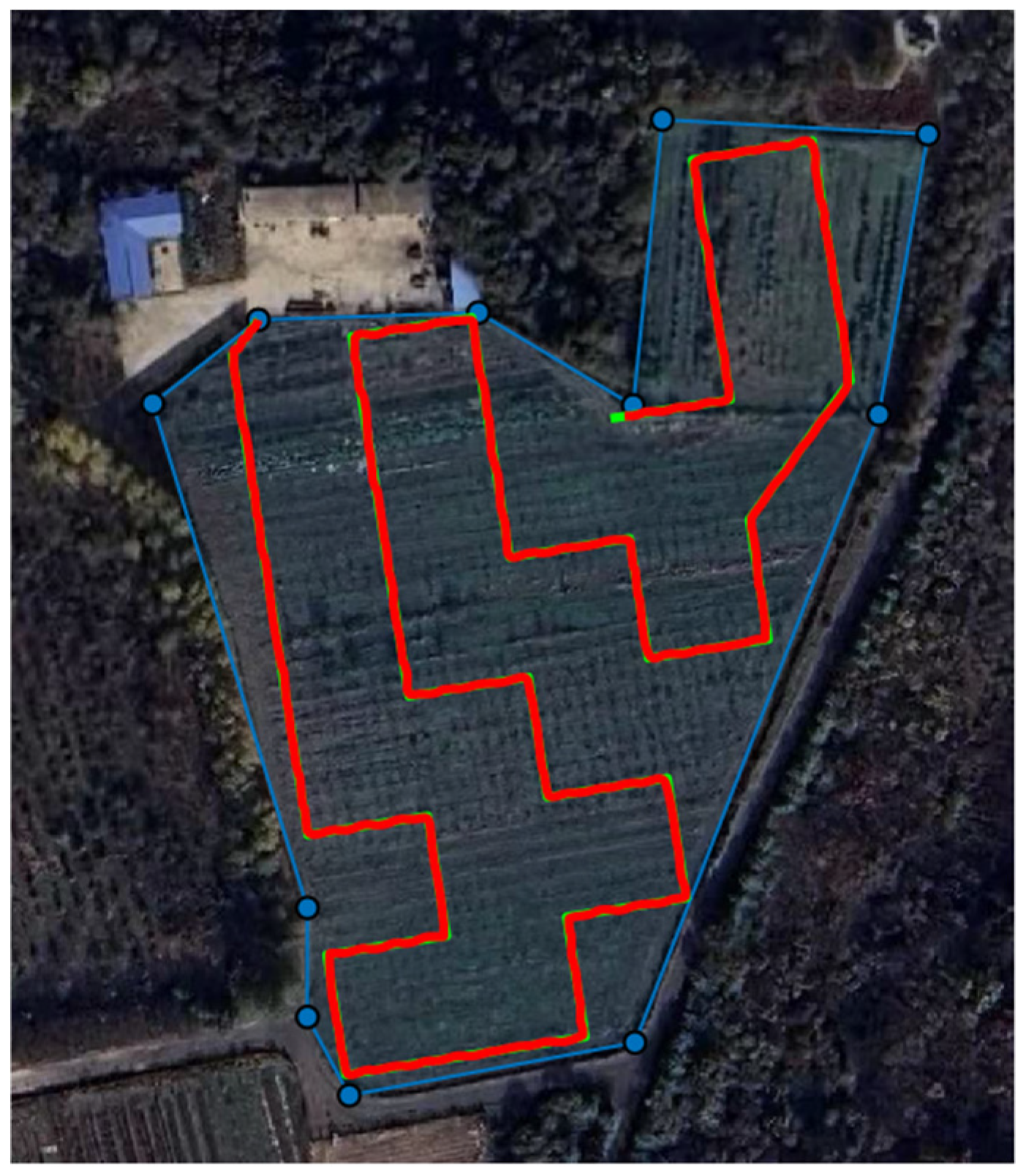
2.1. Study Area Description
2.2. Grid-Based Planning Area
2.3. Mathematical Model of Drone Coverage Path Planning
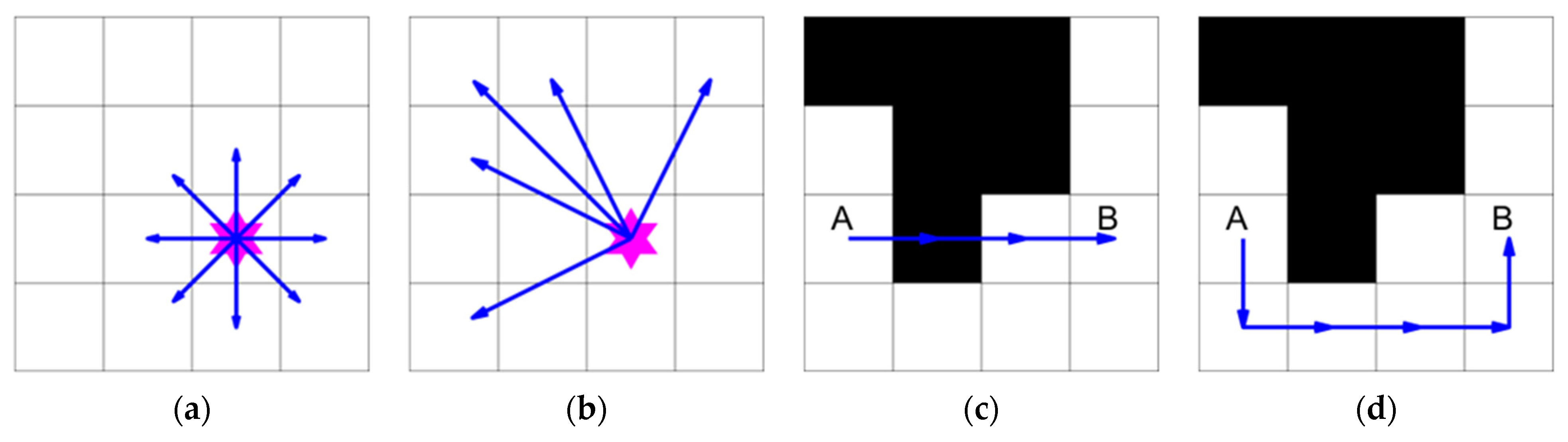
2.3.1. Representation of Flight Paths
2.3.2. Construction of the Objective Function
- Flight Safety Cost Function
- 2.
- Coverage Task Cost Function
- 3.
- Path Length Cost Function
- 4.
- Overall Function for CPP
2.4. Black-Winged Kite Algorithm
2.4.1. Population Initialization
2.4.2. Attack Behavior
2.4.3. Migration Behavior
2.5. Enhancement of Algorithm
2.5.1. Dynamic Position Balancing Strategy
2.5.2. Modified Whale Random Walk Strategy
2.6. Flow of the Proposed Path Planning Method
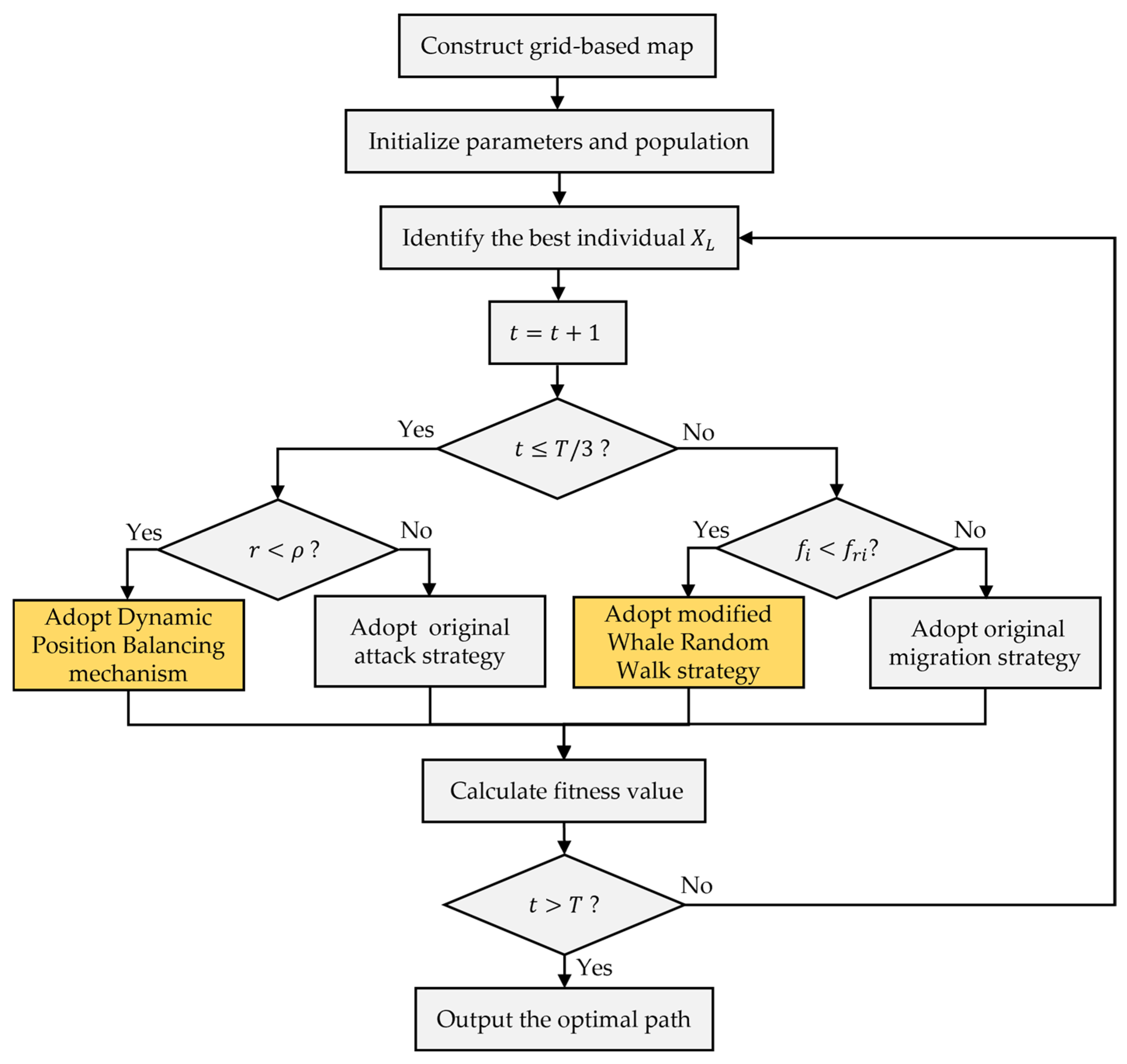
- Step 1: The algorithm commences by constructing an environmental map using the grid-based method. The starting point of the UAV, the set of obstacle grids , the set of free grids , the set of coverage tasks , and the total number of coverage task grids are initialized;
- Step 2: The fundamental parameters of BKA population are initialized. These include the population size , the iteration counter , the maximum iterations , and the initial positions of all individuals inside the solution space;
- Step 3: Iterations begin. The fitness values of all individuals in the population are calculated, and the best individual is identified;
- Step 4: The iteration counter is incremented (). If , advance to Step 5. If not, continue to Step 6;
- Step 5: Attack behavior. A number is produced randomly in the range of 0 to 1. If , the original attack strategy (Equation (12)) is employed to modify the individual’s position. Otherwise, the Dynamic Position Balancing mechanism (Equation (16)) is used to update the individual’s position;
- Step 6: Migration behavior. The current individual’s fitness value is computed. If is inferior to a randomly chosen individual’s fitness value , the original migration strategy (Equation (14)) is used to modify the individual’s position. Otherwise, the modified Whale Random Walk strategy (Equation (19)) is employed to update the individual’s position;
- Step 7: The best individual position (optimal solution) and its fitness value are calculated according to Equation (8);
- Step 8: The algorithm undergoes verification of its termination condition. If the iteration counter is more than , proceed to Step 9. Otherwise, return to Step 3;
- Step 9: The algorithm concludes by outputting the value of fitness and the solution of optimum (optimal path).
3. Results and Discussion
3.1. Settings for Experiments
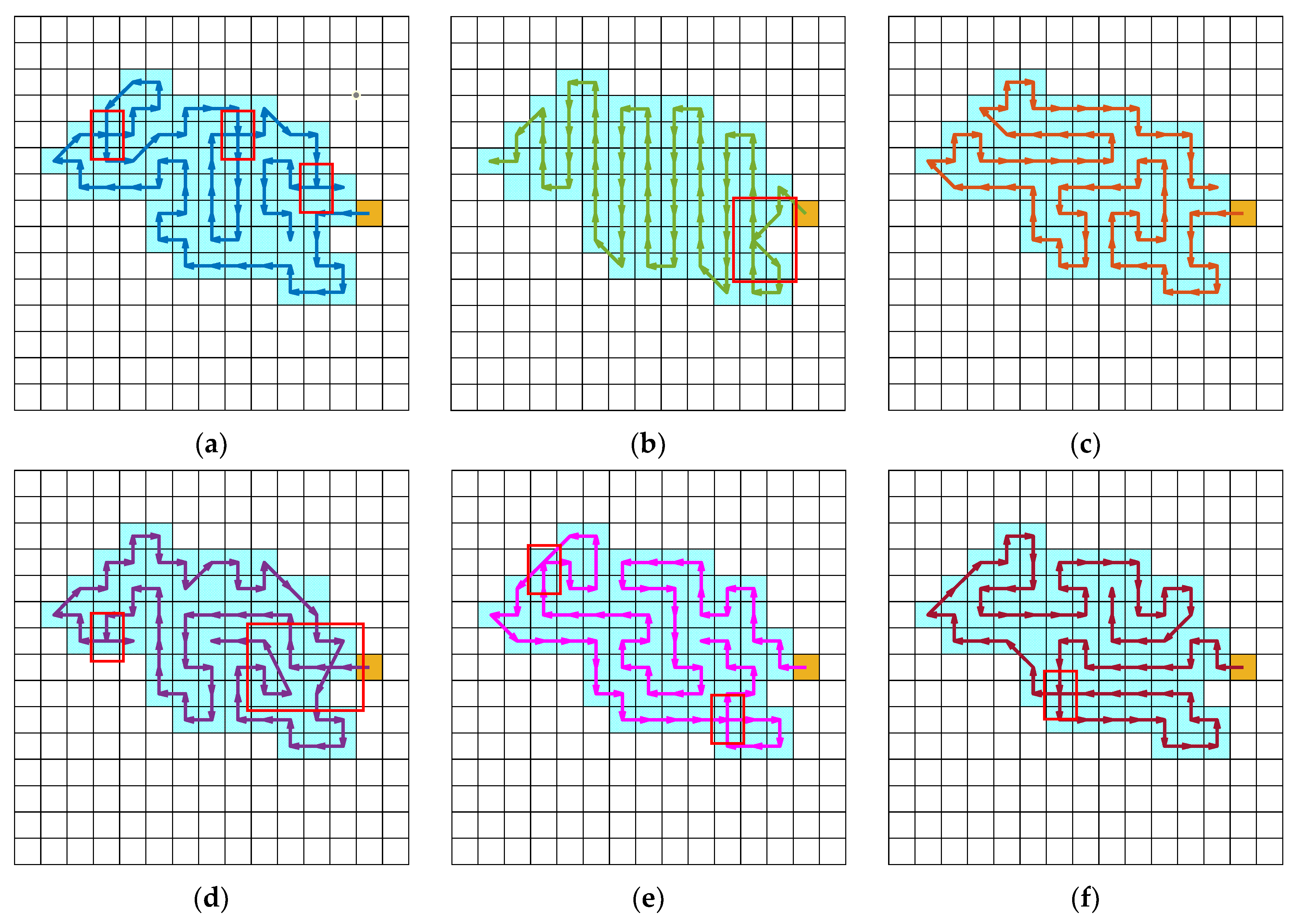
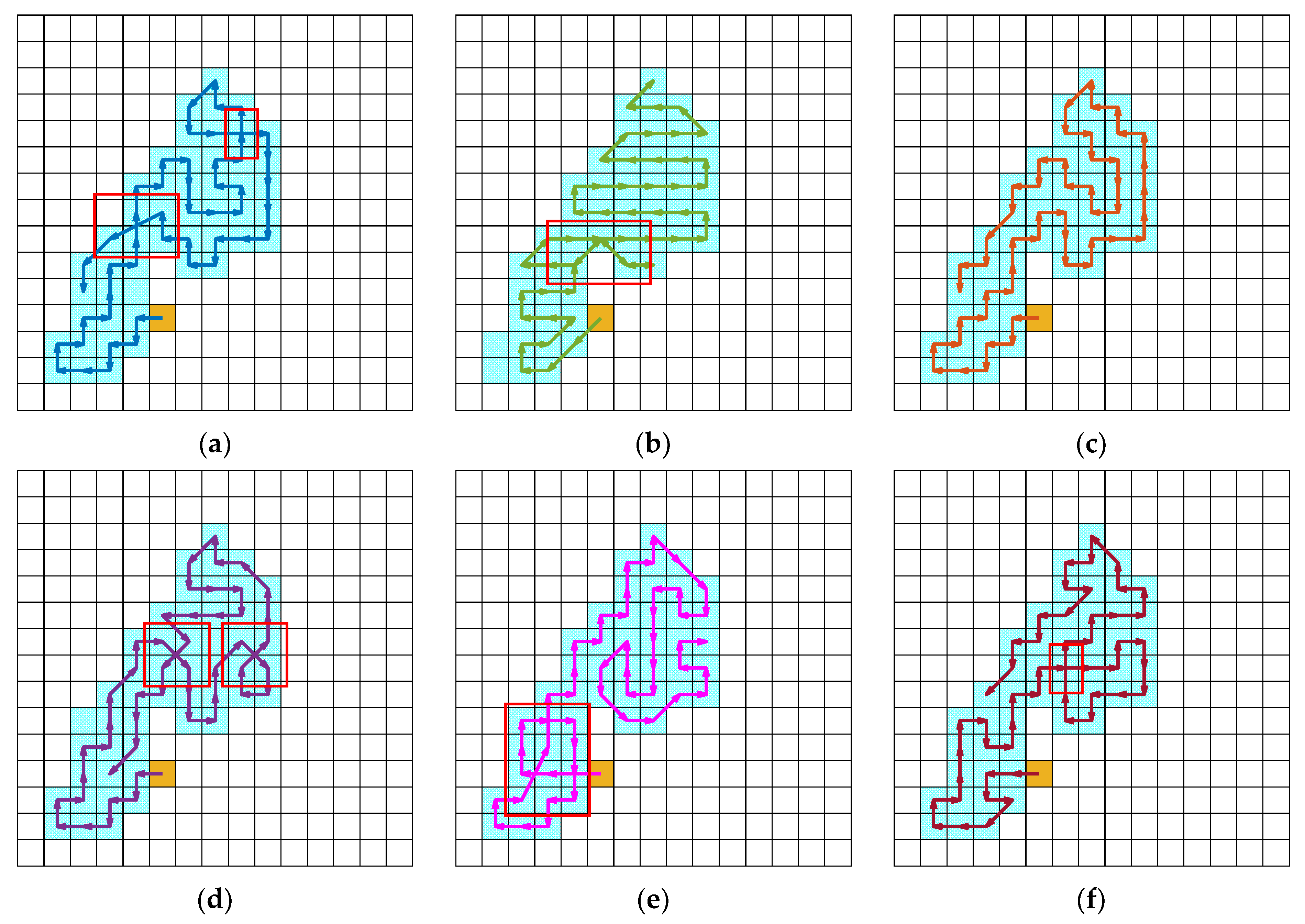
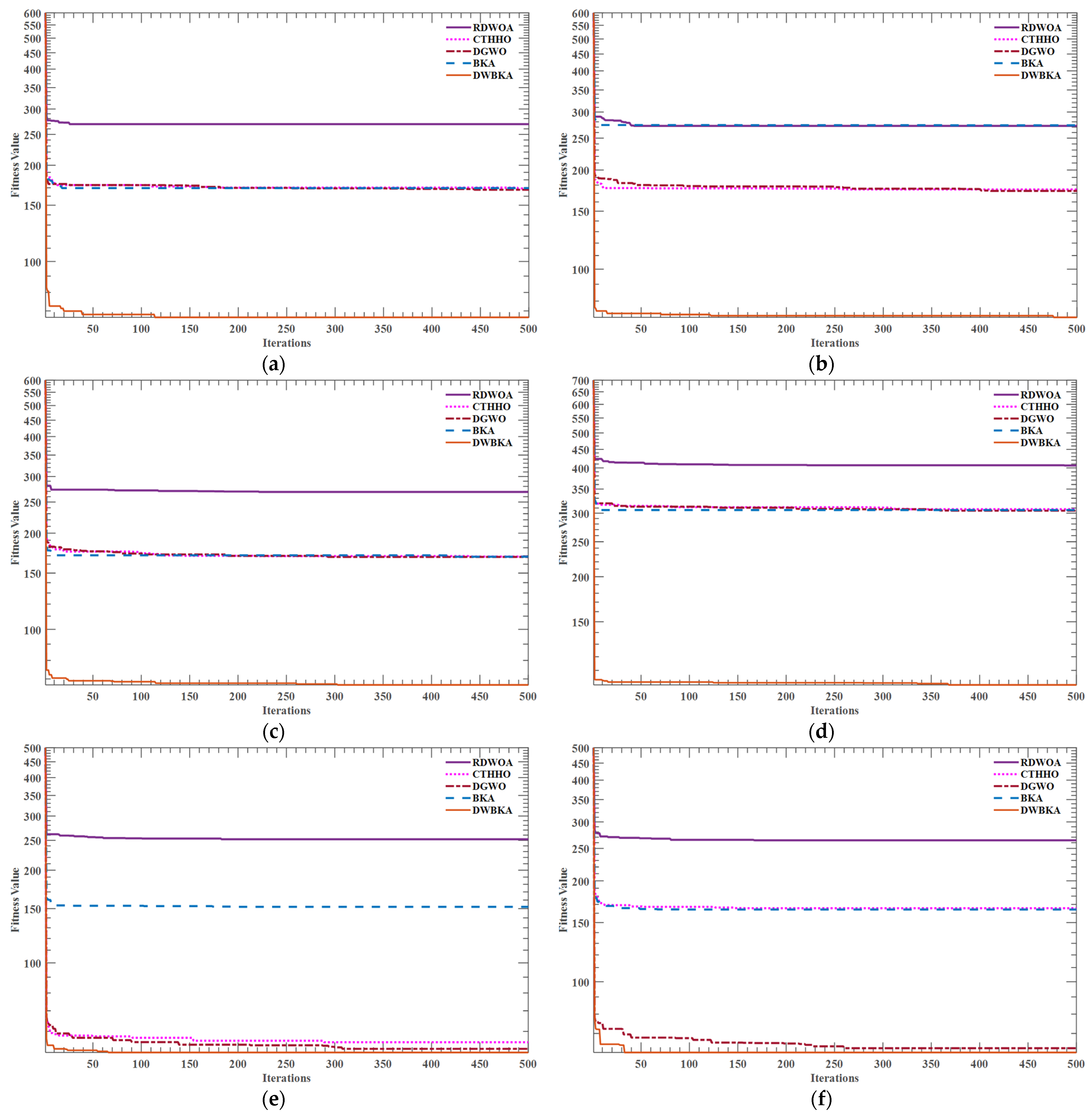
3.2. Results
3.3. Discussion
- In planning the drone’s flight path, this study primarily focused on static threat factors and did not consider sudden situations or unknown local information, such as flocks of birds in the air or wind direction changes, which prevent real-time flight path planning. Adjusting the algorithm to accommodate different real-time factors will be a key focus in future work [73,74].
- Although this study has proposed a CPP algorithm for a single drone, the need for multi-agent collaborative work is becoming increasingly evident with the development of multi-drone systems. Future research can explore collaborative path planning algorithms for multiple drones to enhance overall system efficiency and collaborative performance [75,76].
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BKA | Black-winged Kite Algorithm |
| SAM | Segment Anything Model |
| DWBKA | BKA with Dynamic Position Balancing and modified Whale Random Walk |
| BL-DQN | Deep Q-Network with Bidirectional Long Short-Term Memory |
| UAV | Unmanned Aerial Vehicle |
| CPP | Coverage Path Planning |
| DQN | Deep Q-Network |
| WOA | Whale Optimization Algorithm |
| HHO | Harris Hawk Optimization |
| GWO | Grey Wolf Optimizer |
| RDWOA | WOA with Random Spare and Double Adaptive Weight |
| CTHHO | HHO with Cauchy Distribution Inverse Cumulative and Tangent Flight |
| DGWO | GWO with Dimension Learning-based Hunting |
References
- Jaramillo-Vivanco, T.; Balslev, H.; Montúfar, R.; Cámara, R.M.; Giampieri, F.; Battino, M.; Cámara, M.; Alvarez-Suarez, J.M. Three Amazonian palms as underestimated and little-known sources of nutrients, bioactive compounds and edible insects. Food Chem. 2022, 372, 131273. [Google Scholar] [CrossRef] [PubMed]
- Araujo, N.M.P.; Arruda, H.S.; Marques, D.R.P.; Oliveira, W.Q.; Pereira, G.A.; Pastore, G.M. Functional and nutritional properties of selected Amazon fruits: A review. Food Res. Int. 2021, 147, 110520. [Google Scholar] [CrossRef]
- Perera, S.; Silva, A.B.G.; Amarathunga, Y.; De Silva, S.; Jayatissa, R.; Gamage, A.; Merah, O.; Madhujith, T. Nutritional Composition and Antioxidant Activity of Selected Underutilized Fruits Grown in Sri Lanka. Agronomy 2022, 12, 1073. [Google Scholar] [CrossRef]
- Yang, G.; Wang, Y.; Wang, S.; Zhao, X. Legume cover with optimal nitrogen management and nitrification inhibitor enhanced net ecosystem economic benefits of peach orchard. Sci. Total Environ. 2023, 873, 162141. [Google Scholar] [CrossRef] [PubMed]
- Afsharpour, P.; Zoughi, T.; Deypir, M.; Zoqi, M.J. Robust deep learning method for fruit decay detection and plant identification: Enhancing food security and quality control. Front. Plant Sci. 2024, 15, 1366395. [Google Scholar] [CrossRef]
- Mashilo, J.; Shimelis, H.; Contreras-Soto, R.I.; Ngwepe, R.M. A meta-analysis on rootstock-induced effects in grafted watermelon (Citrullus lanatus var. lanatus). Sci. Hortic. 2023, 319, 112158. [Google Scholar] [CrossRef]
- Wakchaure, G.C.; Minhas, P.S.; Kumar, S.; Mane, P.; Kumar, P.S.; Rane, J.; Pathak, H. Long-term response of dragon fruit (Hylocereus undatus) to transformed rooting zone of a shallow soil improving yield, storage quality and profitability in a drought prone semi-arid agro-ecosystem. Saudi J. Biol. Sci. 2023, 30, 103497. [Google Scholar] [CrossRef]
- Wang, Q.; Yu, X.; Wang, J.; Wei, B.; Zhou, Q.; Cheng, S.; Sun, Y.; Li, B. Slight water loss affects the quality of ‘Longcheng 2’ kiwiberry fruit infected with gray mold disease. Sci. Hortic. 2024, 328, 112932. [Google Scholar] [CrossRef]
- Huang, Y.; Li, J.; Shan, X.; Wang, H.; Duan, Y. Bioactivities evaluation of an endophytic bacterial strain Bacillus tequilensis QNF2 inhibiting apple ring rot caused by Botryosphaeria dothidea on postharvest apple fruits. Food Microbiol. 2024, 123, 104590. [Google Scholar] [CrossRef]
- Ding, J.; Liu, C.; Huang, P.; Zhang, Y.; Hu, X.; Li, H.; Liu, Y.; Chen, L.; Liu, Y.; Qin, W. Effects of thymol concentration on postharvest diseases and quality of blueberry fruit. Food Chem. 2023, 402, 134227. [Google Scholar] [CrossRef]
- He, Z.; Abeywickrama, P.D.; Wu, L.; Zhou, Y.; Zhang, W.; Yan, J.; Shang, Q.; Zhou, Y.; Li, S. Diversity of Cytospora Species Associated with Trunk Diseases of Prunus persica (Peach) in Northern China. J. Fungi 2024, 10, 843. [Google Scholar] [CrossRef] [PubMed]
- Ning, M.; Guo, Q.; Guo, P.; Cui, Y.; Wang, K.; Du, G.; Wang, Z.; Yuan, Y.; Yue, T. Biocontrol activity of Kluyveromyces marxianus YG-4 against Penicillium expansum LPH9 on apples. Int. J. Food Microbiol. 2025, 427, 110943. [Google Scholar] [CrossRef]
- Winkler, A.; Bauer, S.; Jung, J.; Kleinhenz, B.; Racca, P. SIMKEF—A decision support system to predict the infestation probability of Drosophila suzukii. Crop Prot. 2024, 185, 106858. [Google Scholar] [CrossRef]
- Wang, X.; Chen, J.; Luo, D.; Ba, L. Advances in the Understanding of Postharvest Physiological Changes and the Storage and Preservation of Pitaya. Foods 2024, 13, 1307. [Google Scholar] [CrossRef]
- Acevedo, C.M.D.; Niño, D.D.C.; Gómez, J.K.C. Sensory Perception Systems and Machine Learning Methods for Pesticide Detection in Fruits. Appl. Sci. 2024, 14, 8074. [Google Scholar] [CrossRef]
- Gu, D.; Zhang, J.; Ding, Y.; Wang, Y.; Yang, J.; Shi, G.; Li, B.; Zhao, J. Design and Analysis of an Electric Integrated Work Vehicle for Corn Intertillage Fertilization and Pesticide Spraying. Appl. Sci. 2024, 14, 11356. [Google Scholar] [CrossRef]
- Araaf, R.T.; Minn, A.; Ahamed, T. Coffee Leaf Rust Disease Detection and Implementation of an Edge Device for Pruning Infected Leaves via Deep Learning Algorithms. Sensors 2024, 24, 8018. [Google Scholar] [CrossRef]
- Jiang, H.; Yang, P. A Three-Dimensional Coverage Path Planning Method for Robots for Farmland with Complex Hilly Terrain. Appl. Sci. 2024, 14, 11231. [Google Scholar] [CrossRef]
- Liu, H.; Zeng, X.; Shen, Y.; Xu, J.; Khan, Z. A Single-Stage Navigation Path Extraction Network for agricultural robots in orchards. Comput. Electron. Agric. 2025, 229, 109687. [Google Scholar] [CrossRef]
- Shan, C.; Wang, G.; Wang, H.; Wu, L.; Song, C.; Hussain, M.; Wang, H.; Lan, Y. Assessing the efficiency of UAV for pesticide application in disease management of peanut crop. Pest Manag. Sci. 2024, 80, 4505–4515. [Google Scholar] [CrossRef]
- Shi, N.; Chen, Z.; Li, H.; Hua, H.; Xu, T.; Ye, J. Development and assessment of a novel single-drive variable angle spraying machine. Sci. Rep. 2024, 14, 31264. [Google Scholar] [CrossRef]
- Zhou, X.; Sun, D.; Xue, X.; Xiahou, B.; Dai, Q.; Song, S. A Novel Approach to Enhancing Pesticide Spraying Effectiveness on Citrus Leaves: Adjusting Soil Moisture Content to Improve Leaf Wettability. Agronomy 2024, 14, 3065. [Google Scholar] [CrossRef]
- Marco, F.L.; Sabino, C.; Tuti, G.S.; Luisetto, I.; Petritoli, E.; Pecora, A.; Maiolo, L.; Đurović-Pejčev, R.; Đorđević, T.; Tomašević, A. Electronic nose for pesticides detection: A first realization. In Proceedings of the 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017; pp. 403–407. [Google Scholar]
- Kong, C.; Ren, L.; Zhang, T.; Sun, Y.; Chang, Z. Rapid identification of pesticides in soil by bionic sniffing sensing system with unknown category detection function. Comput. Electron. Agric. 2024, 217, 108667. [Google Scholar] [CrossRef]
- Chen, H.; Wu, K.; Lin, H.; Zhou, H.; Zhou, Z.; Mai, Y.; Shi, L.; Zhang, M.; Ma, Z.; Lin, P.; et al. A real-time vision guidance method for autonomous longan picking by the UAV. Comput. Electron. Agric. 2025, 229, 109735. [Google Scholar] [CrossRef]
- Chen, P.; Lan, Y.; Huang, X.; Qi, H.; Wang, G.; Wang, J.; Wang, L.; Xiao, H. Droplet Deposition and Control of Planthoppers of Different Nozzles in Two-Stage Rice with a Quadrotor Unmanned Aerial Vehicle. Agronomy 2020, 10, 303. [Google Scholar] [CrossRef]
- Lee, Y.-J.; Kim, S.-H.; Eun, H.-R.; Kim, S.-M.; Jeong, M.-J.; Baek, J.-W.; Lee, Y.-H.; Noh, H.H.; Shin, Y. Enhancement of Tricyclazole Analysis Efficiency in Rice Samples Using an Improved QuEChERS and Its Application in Residue: A Study from Unmanned Arial Spraying. Appl. Sci. 2024, 14, 5607. [Google Scholar] [CrossRef]
- Fang, X.; Li, X.; Xie, L. Angle-displacement rigidity theory with application to distributed network localization. IEEE Trans. Autom. Control 2020, 66, 2574–2587. [Google Scholar] [CrossRef]
- Eun, H.R.; Kim, S.H.; Lee, Y.H.; Kim, S.M.; Lee, Y.J.; Jung, H.Y.; Min, Y.G.; Noh, H.H.; Shin, Y. Comparison of off-target pesticide drift in paddy fields from unmanned aerial vehicle spraying using cellulose deposition sampler. Ecotox. Environ. Safe. 2024, 285, 117075. [Google Scholar] [CrossRef]
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A compilation of UAV applications for precision agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Ijaz, S.; Shi, Y.; Khan, Y.A.; Khodaverdian, M.; Javaid, U. Robust adaptive control law design for enhanced stability of agriculture UAV used for pesticide spraying. Aerosp. Sci. Technol. 2024, 155, 109676. [Google Scholar] [CrossRef]
- Jiang, J.; Ji, H.; Zhou, G.; Pan, R.; Zhao, L.; Duan, Z.; Liu, X.; Yin, J.; Duan, Y.; Ma, Y.; et al. Non-destructive monitoring of tea plant growth through UAV spectral imagery and meteorological data using machine learning and parameter optimization algorithms. Comput. Electron. Agric. 2025, 229, 109795. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, X.; Zhang, H.; Zhang, B.; Zhang, J.; Hu, X.; Du, X.; Cai, J.; Jia, W.; Wu, C. UAV-Based Multispectral Winter Wheat Growth Monitoring with Adaptive Weight Allocation. Agriculture 2024, 14, 1900. [Google Scholar] [CrossRef]
- Ruwanpathirana, P.P.; Sakai, K.; Jayasinghe, G.Y.; Nakandakari, T.; Yuge, K.; Wijekoon, W.M.C.J.; Priyankara, A.C.P.; Samaraweera, M.D.S.; Madushanka, P.L.A. Evaluation of Sugarcane Crop Growth Monitoring Using Vegetation Indices Derived from RGB-Based UAV Images and Machine Learning Models. Agronomy 2024, 14, 2059. [Google Scholar] [CrossRef]
- Shi, X.; Du, Y.; Liu, X.; Liu, C.; Hou, Q.; Chen, L.; Yong, R.; Ma, J.; Yang, D.; Yuan, H.; et al. Optimizing UAV spray parameters to improve precise control of tobacco pests at different growth stages. Pest Manag. Sci. 2024, 80, 5809–5819. [Google Scholar] [CrossRef]
- Guo, H.; Cheng, Y.; Liu, J.; Wang, Z. Low-cost and precise traditional Chinese medicinal tree pest and disease monitoring using UAV RGB image only. Sci Rep 2024, 14, 25562. [Google Scholar] [CrossRef]
- Joshi, P.; Sandhu, K.S.; Dhillon, G.S.; Chen, J.; Bohara, K. Detection and monitoring wheat diseases using unmanned aerial vehicles (UAVs). Comput. Electron. Agric. 2024, 224, 109158. [Google Scholar] [CrossRef]
- Bozzini, A.; Brugnaro, S.; Morgante, G.; Santoiemma, G.; Deganutti, L.; Finozzi, V.; Battisti, A.; Faccoli, M. Drone-based early detection of bark beetle infested spruce trees differs in endemic and epidemic populations. Front. For. Glob. Change 2024, 7, 1385687. [Google Scholar] [CrossRef]
- Anam, I.; Arafat, N.; Hafiz, M.S.; Jim, J.R.; Kabir, M.M.; Mridha, M.F. A systematic review of UAV and AI integration for targeted disease detection, weed management, and pest control in precision agriculture. Smart Agric. Technol. 2024, 9, 100647. [Google Scholar] [CrossRef]
- Wang, L.; Zhuang, X.; Zhang, W.; Cheng, J.; Zhang, T. Coverage Path Planning for UAVs: An Energy-Efficient Method in Convex and Non-Convex Mixed Regions. Drones 2024, 8, 776. [Google Scholar] [CrossRef]
- Huang, J.; Luo, Y.; Quan, Q.; Wang, B.; Xue, X.; Zhang, Y. An autonomous task assignment and decision-making method for coverage path planning of multiple pesticide spraying UAVs. Comput. Electron. Agric. 2023, 212, 108128. [Google Scholar] [CrossRef]
- Nanavati, R.V.; Meng, Y.; Coombes, M.; Liu, C. Generalized data-driven optimal path planning framework for uniform coverage missions using crop spraying UAVs. Precis. Agric. 2023, 24, 1497–1525. [Google Scholar] [CrossRef]
- Li, J.; Sheng, H.; Zhang, J.; Zhang, H. Coverage Path Planning Method for Agricultural Spraying UAV in Arbitrary Polygon Area. Aerospace 2023, 10, 755. [Google Scholar] [CrossRef]
- Li, J.; Zhang, W.; Ren, J.; Yu, W.; Wang, G.; Ding, P.; Wang, J.; Zhang, X. A Multi-Area Task Path-Planning Algorithm for Agricultural Drones Based on Improved Double Deep Q-Learning Net. Agriculture 2024, 14, 1294. [Google Scholar] [CrossRef]
- Fu, H.; Li, Z.; Zhang, W.; Feng, Y.; Zhu, L.; Fang, X.; Li, J. Research on Path Planning of Agricultural UAV Based on Improved Deep Reinforcement Learning. Agronomy 2024, 14, 2669. [Google Scholar] [CrossRef]
- Arab, D.P.; Spisser, M.; Essert, C. Complete coverage path planning for wheeled agricultural robots. J. Field Robot. 2023, 40, 1460–1503. [Google Scholar] [CrossRef]
- Wang, N.; Yang, X.; Wang, T.; Xiao, J.; Zhang, M.; Wang, H.; Li, H. Collaborative path planning and task allocation for multiple agricultural machines. Comput. Electron. Agric. 2023, 213, 108218. [Google Scholar] [CrossRef]
- Höffmann, M.; Patel, S.; Büskens, C. Optimal Coverage Path Planning for Agricultural Vehicles with Curvature Constraints. Agriculture 2023, 13, 2112. [Google Scholar] [CrossRef]
- Zhang, M.; Li, X.; Wang, L.; Jin, L.; Wang, S. A Path Planning System for Orchard Mower Based on Improved A* Algorithm. Agronomy 2024, 14, 391. [Google Scholar] [CrossRef]
- Tang, C.; Li, W.; Han, T.; Yu, L.; Cui, T. Multi-Strategy Improved Harris Hawk Optimization Algorithm and Its Application in Path Planning. Biomimetics 2024, 9, 552. [Google Scholar] [CrossRef]
- Warnakulasooriya, K.; Segev, A. Comparative analysis of accuracy and computational complexity across 21 swarm intelligence algorithms. Evol. Intell. 2024, 18, 18. [Google Scholar] [CrossRef]
- Chai, X.; Zheng, Z.; Xiao, J.; Yan, L.; Qu, B.; Wen, P.; Wang, H.; Zhou, Y.; Sun, H. Multi-strategy fusion differential evolution algorithm for UAV path planning in complex environment. Aerosp. Sci. Technol. 2022, 121, 107287. [Google Scholar] [CrossRef]
- Jiang, W.; Lyu, Y.; Li, Y.; Guo, Y.; Zhang, W. UAV path planning and collision avoidance in 3D environments based on POMPD and improved grey wolf optimizer. Aerosp. Sci. Technol. 2022, 121. [Google Scholar] [CrossRef]
- Gupta, H.; Verma, O.P. A novel hybrid Coyote–Particle Swarm Optimization Algorithm for three-dimensional constrained trajectory planning of Unmanned Aerial Vehicle. Appl. Soft. Comput. 2023, 147, 110776. [Google Scholar] [CrossRef]
- Hu, G.; Zhong, J.; Wei, G. SaCHBA_PDN: Modified honey badger algorithm with multi-strategy for UAV path planning. Expert Syst. Appl. 2023, 223, 119941. [Google Scholar] [CrossRef]
- Chen, Y.; Pi, D.; Xu, Y. Neighborhood Global Learning based Flower Pollination Algorithm and its Application to Unmanned Aerial Vehicle Path Planning. Expert Syst. Appl. 2020, 170, 114505. [Google Scholar] [CrossRef]
- Wang, J.; Wang, W.c.; Hu, X.X.; Qiu, L.; Zang, H.f. Black-winged kite algorithm: A nature-inspired meta-heuristic for solving benchmark functions and engineering problems. Artif. Intell. Rev. 2024, 57, 53. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Yakunin, K.; Aubakirov, M.; Assanov, I.; Kuchin, Y.; Symagulov, A.; Levashenko, V.; Zaitseva, E.; Sokolov, D.; Amirgaliyev, Y. Coverage Path Planning Optimization of Heterogeneous UAVs Group for Precision Agriculture. IEEE Access 2023, 11, 5789–5803. [Google Scholar] [CrossRef]
- Chen, H.; Yang, C.; Heidari, A.A.; Zhao, X. An efficient double adaptive random spare reinforced whale optimization algorithm. Expert Syst. Appl. 2020, 154, 113018. [Google Scholar] [CrossRef]
- Wang, M.; Wang, J.S.; Li, X.D.; Zhang, M.; Hao, W.K. Harris Hawk Optimization Algorithm Based on Cauchy Distribution Inverse Cumulative Function and Tangent Flight Operator. Appl. Intell. 2022, 52, 1–28. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S. An Improved Grey Wolf Optimizer for Solving Engineering Problems. Expert Syst. Appl. 2021, 166, 113917. [Google Scholar] [CrossRef]
- Li, J.; Xiong, Y.; She, J.; Yu, A. Optimal path planning for unmanned aerial vehicles with multiple round-trip flights in coverage tasks. Robot. Auton. Syst. 2025, 189, 104970. [Google Scholar] [CrossRef]
- Bhuiyan, T.H.; Walker, V.; Roni, M.; Ahmed, I. Aerial drone fleet deployment optimization with endogenous battery replacements for direct delivery of time-sensitive products. Expert Syst. Appl. 2024, 252, 124172. [Google Scholar] [CrossRef]
- Porcelli, L.; Ficco, M.; D’Angelo, G.; Palmieri, F. Context-aware coverage path planning for a swarm of UAVs using mobile ground stations for battery-swapping. Soft Comput. 2025, 29, 1–21. [Google Scholar] [CrossRef]
- Yu, X.; Luo, Y.; Liu, Y. A novel adaptive two-stage approach to dynamic optimal path planning of UAV in 3-D unknown environments. Multimed. Tools Appl. 2022, 82, 18761–18779. [Google Scholar] [CrossRef]
- Seoane, P.; Aldao, E.; López, F.V.; Jorge, H.G. Assessment of LiDAR-Based Sensing Technologies in Bird–Drone Collision Scenarios. Drones 2024, 9, 13. [Google Scholar] [CrossRef]
- Xu, C. UAV patrol path planning based on machine vision and multi-sensor fusion. Open Comput. Sci. 2023, 13, 20220276. [Google Scholar]
- Niu, Y.; Yan, X.; Wang, Y.; Niu, Y. 3D real-time dynamic path planning for UAV based on improved interfered fluid dynamical system and artificial neural network. Adv. Eng. Inform. 2024, 59, 102306. [Google Scholar] [CrossRef]
- Du, P.; Shi, Y.; Cao, H.; Garg, S.; Alrashoud, M.; Shukla, P.K. AI-Enabled Trajectory Optimization of Logistics UAVs With Wind Impacts in Smart Cities. IEEE Trans. Consum. Electron. 2024, 70, 3885–3897. [Google Scholar] [CrossRef]
- Wang, Z.; Gong, H.; Nie, M.; Liu, X. Research on Multi-UAV Cooperative Dynamic Path Planning Algorithm Based on Conflict Search. Drones 2024, 8, 274. [Google Scholar] [CrossRef]
- Kuyffer, E.D.; Joseph, W.; Martens, L.; Pessemier, T.D. Travel route and formation optimization for flocks of drones in package delivery by using an ACO based V-Shape algorithm. Results Eng. 2024, 24, 103627. [Google Scholar] [CrossRef]
- Wang, W.; Li, X.; Tian, J. UAV formation path planning for mountainous forest terrain utilizing an artificial rabbit optimizer incorporating reinforcement learning and thermal conduction search strategies. Adv. Eng. Inform. 2024, 62, 102947. [Google Scholar] [CrossRef]
- Fang, X.; Xie, L.; Li, X. Distributed localization in dynamic networks via complex laplacian. Automatica 2023, 151, 2574–2587. [Google Scholar] [CrossRef]
- Fang, X.; Li, X.; Xie, L. 3-D Distributed Localization with Mixed Local Relative Measurements. IEEE Trans. Signal Process. 2020, 68, 5869–5881. [Google Scholar] [CrossRef]
- Fang, X.; Xie, L. Distributed formation maneuver control using complex laplacian. IEEE Trans. Autom. Control 2023, 69, 1850–1857. [Google Scholar] [CrossRef]
- Fang, X.; Xie, L.; Li, X. Integrated relative-measurement-based network localization and formation maneuver control. IEEE Trans. Autom. Control 2023, 69, 1906–1913. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Algorithms | Coverage (%) | Repeated Coverage (%) | Path Length | Computation Time (s) |
|---|---|---|---|---|---|
| Scenario 1 | Ours | 100.00% | 0.00% | 66.83 | 75.33 |
| BKA | 98.48% | 4.62% | 69.66 | 156.62 | |
| BL-DQN | 98.48% | 1.54% | 68.49 | 1016.57 | |
| RDWOA | 96.97% | 7.81% | 69.13 | 141.65 | |
| CTHHO | 98.48% | 3.08% | 69.24 | 180.27 | |
| DGWO | 98.48% | 1.54% | 67.66 | 150.03 | |
| Scenario 2 | Ours | 100.00% | 0.00% | 71.41 | 81.31 |
| BKA | 97.18% | 4.35% | 73.49 | 159.33 | |
| BL-DQN | 97.18% | 2.90% | 73.90 | 1012.03 | |
| RDWOA | 97.18% | 2.90% | 72.24 | 153.32 | |
| CTHHO | 98.59% | 5.71% | 74.64 | 189.92 | |
| DGWO | 98.59% | 4.29% | 72.89 | 162.02 | |
| Scenario 3 | Ours | 100.00% | 0.00% | 67.07 | 72.63 |
| BKA | 98.46% | 4.69% | 68.72 | 144.50 | |
| BL-DQN | 96.92% | 10.17% | 73.97 | 977.55 | |
| RDWOA | 96.92% | 6.35% | 68.90 | 141.01 | |
| CTHHO | 98.46% | 3.13% | 68.90 | 177.08 | |
| DGWO | 98.46% | 3.13% | 68.49 | 153.32 | |
| Scenario 4 | Ours | 100.00% | 0.00% | 100.24 | 114.42 |
| BKA | 97.98% | 7.22% | 106.02 | 228.01 | |
| BL-DQN | 98.99% | 5.32% | 105.07 | 986.32 | |
| RDWOA | 96.97% | 8.33% | 106.03 | 219.64 | |
| CTHHO | 97.98% | 9.28% | 107.67 | 276.43 | |
| DGWO | 97.98% | 5.15% | 104.80 | 228.37 | |
| Scenario 5 | Ours | 100.00% | 0.00% | 50.83 | 54.64 |
| BKA | 98.00% | 6.12% | 52.06 | 108.40 | |
| BL-DQN | 96.00% | 8.70% | 56.56 | 1001.43 | |
| RDWOA | 96.00% | 4.17% | 52.14 | 105.44 | |
| CTHHO | 100.00% | 8.00% | 55.31 | 132.09 | |
| DGWO | 100.00% | 2.00% | 52.66 | 111.31 | |
| Scenario 6 | Ours | 100.00% | 0.00% | 61.41 | 66.79 |
| BKA | 98.36% | 6.67% | 64.06 | 132.85 | |
| BL-DQN | 96.72% | 3.39% | 63.49 | 981.86 | |
| RDWOA | 96.72% | 6.78% | 64.37 | 129.66 | |
| CTHHO | 98.36% | 8.33% | 65.54 | 165.32 | |
| DGWO | 100.00% | 4.92% | 63.24 | 135.93 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Fu, S.; Zhang, W.; Fu, H.; Fang, X.; Li, Z. Enhanced Black-Winged Kite Algorithm for Drone Coverage in Complex Fruit Farms. Agriculture 2025, 15, 1044. https://doi.org/10.3390/agriculture15101044
Li J, Fu S, Zhang W, Fu H, Fang X, Li Z. Enhanced Black-Winged Kite Algorithm for Drone Coverage in Complex Fruit Farms. Agriculture. 2025; 15(10):1044. https://doi.org/10.3390/agriculture15101044
Chicago/Turabian StyleLi, Jian, Shengliang Fu, Weijian Zhang, Haitao Fu, Xu Fang, and Zheng Li. 2025. "Enhanced Black-Winged Kite Algorithm for Drone Coverage in Complex Fruit Farms" Agriculture 15, no. 10: 1044. https://doi.org/10.3390/agriculture15101044
APA StyleLi, J., Fu, S., Zhang, W., Fu, H., Fang, X., & Li, Z. (2025). Enhanced Black-Winged Kite Algorithm for Drone Coverage in Complex Fruit Farms. Agriculture, 15(10), 1044. https://doi.org/10.3390/agriculture15101044