
Leaf Pruning End-Effector for Adaptive Positioning at the Branch–Stem Junction of Tomato Plants


 ,
,
Abstract
1. Introduction
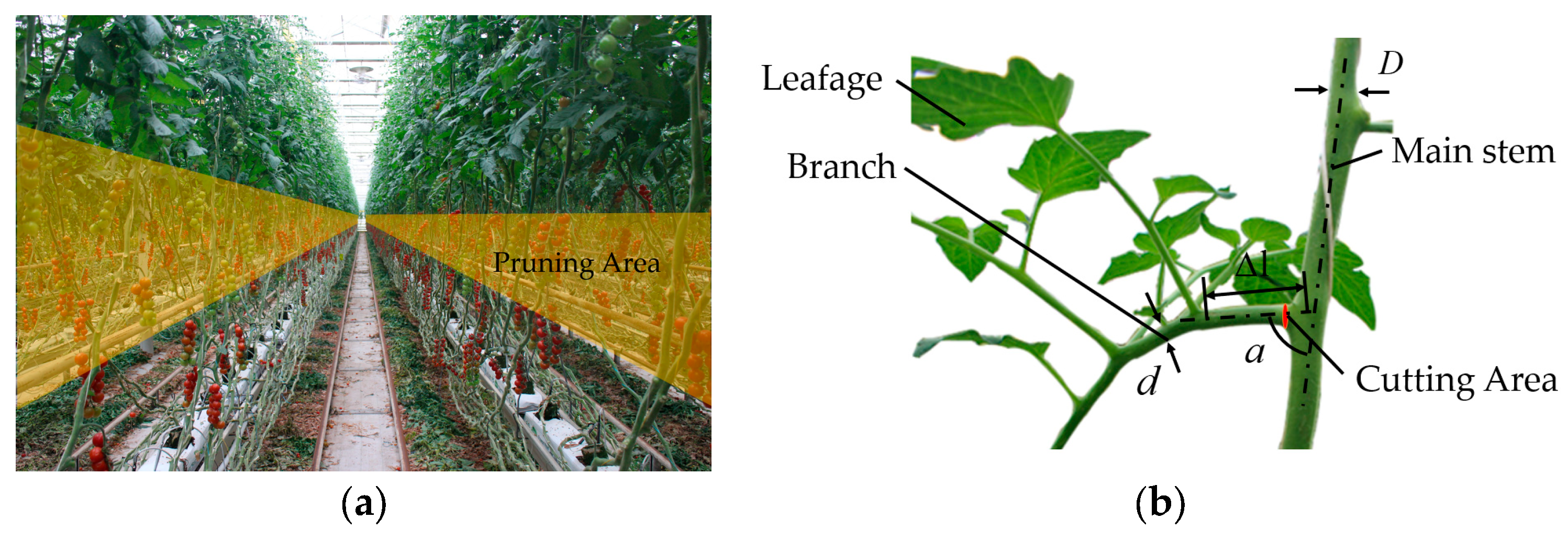
2. Measurement and Analysis of the Physical Properties of Branches
2.1. Morphological Characteristics of Branch
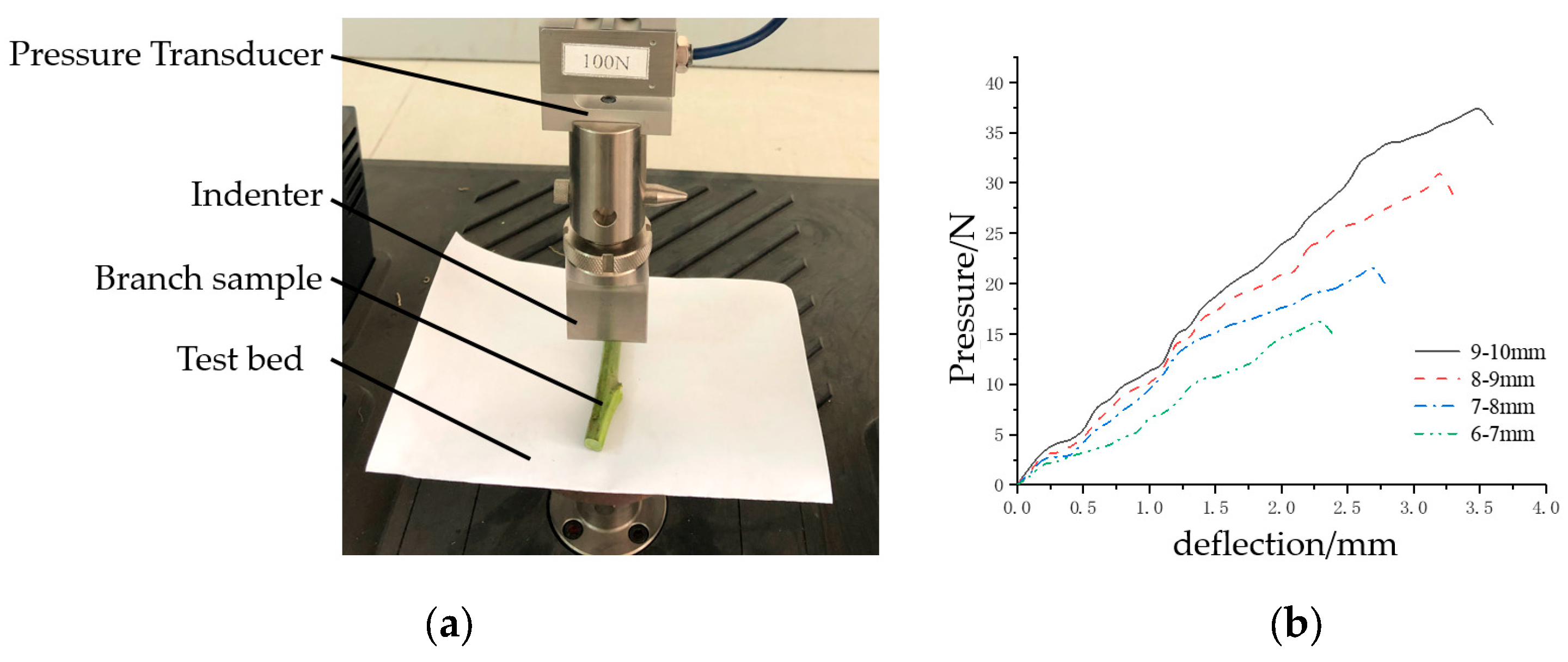
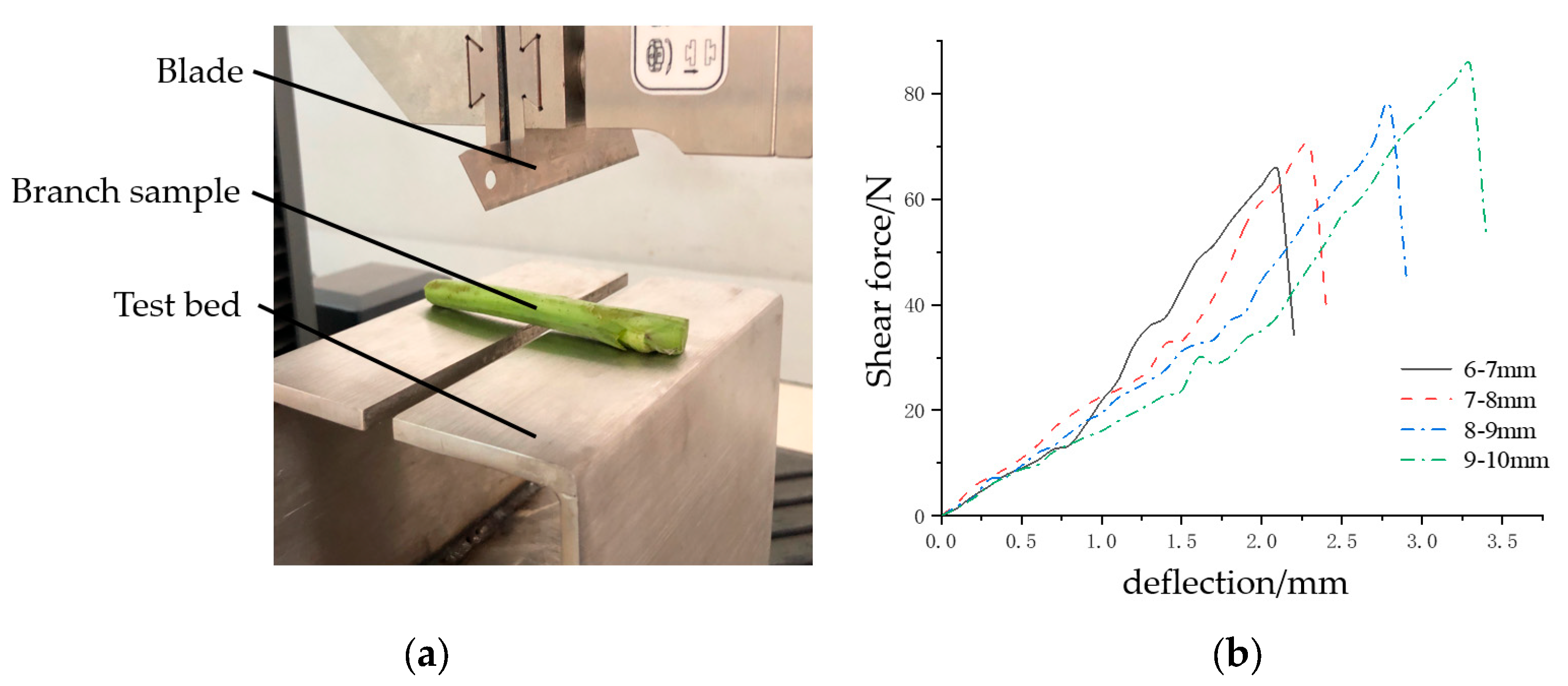
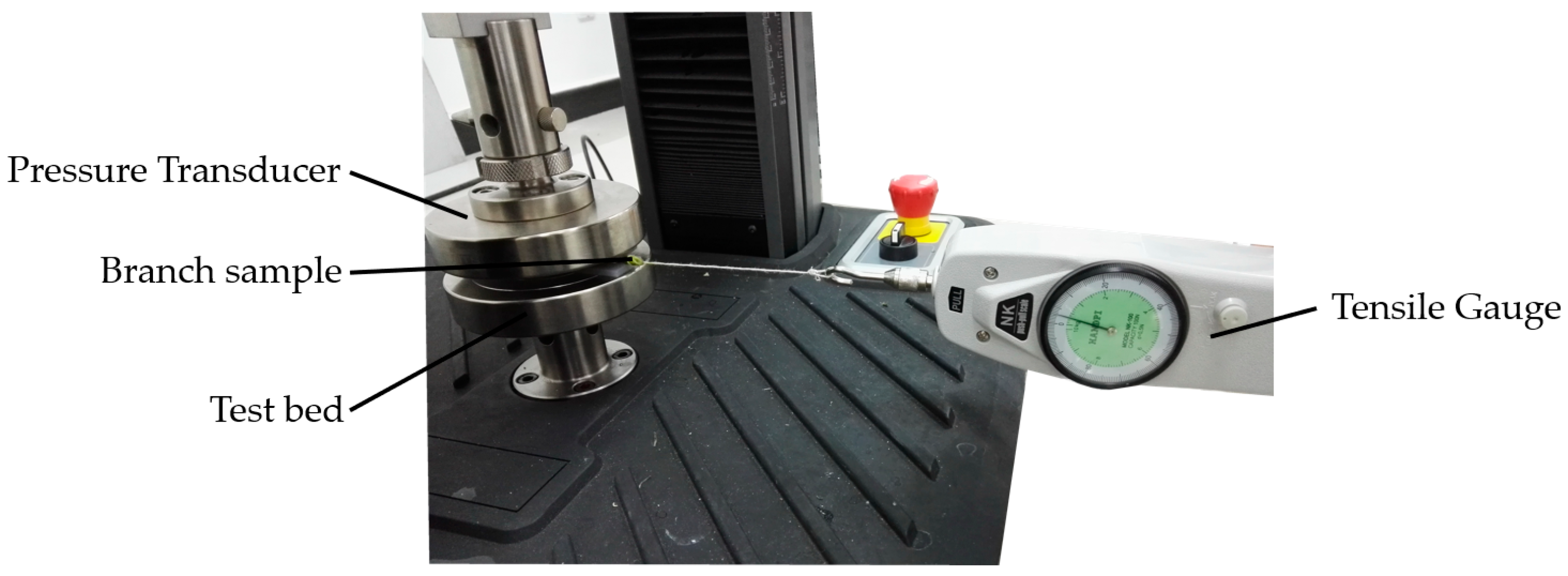
2.2. Measurement of Branch Mechanical Properties
2.2.1. Measurement of Compressive Properties
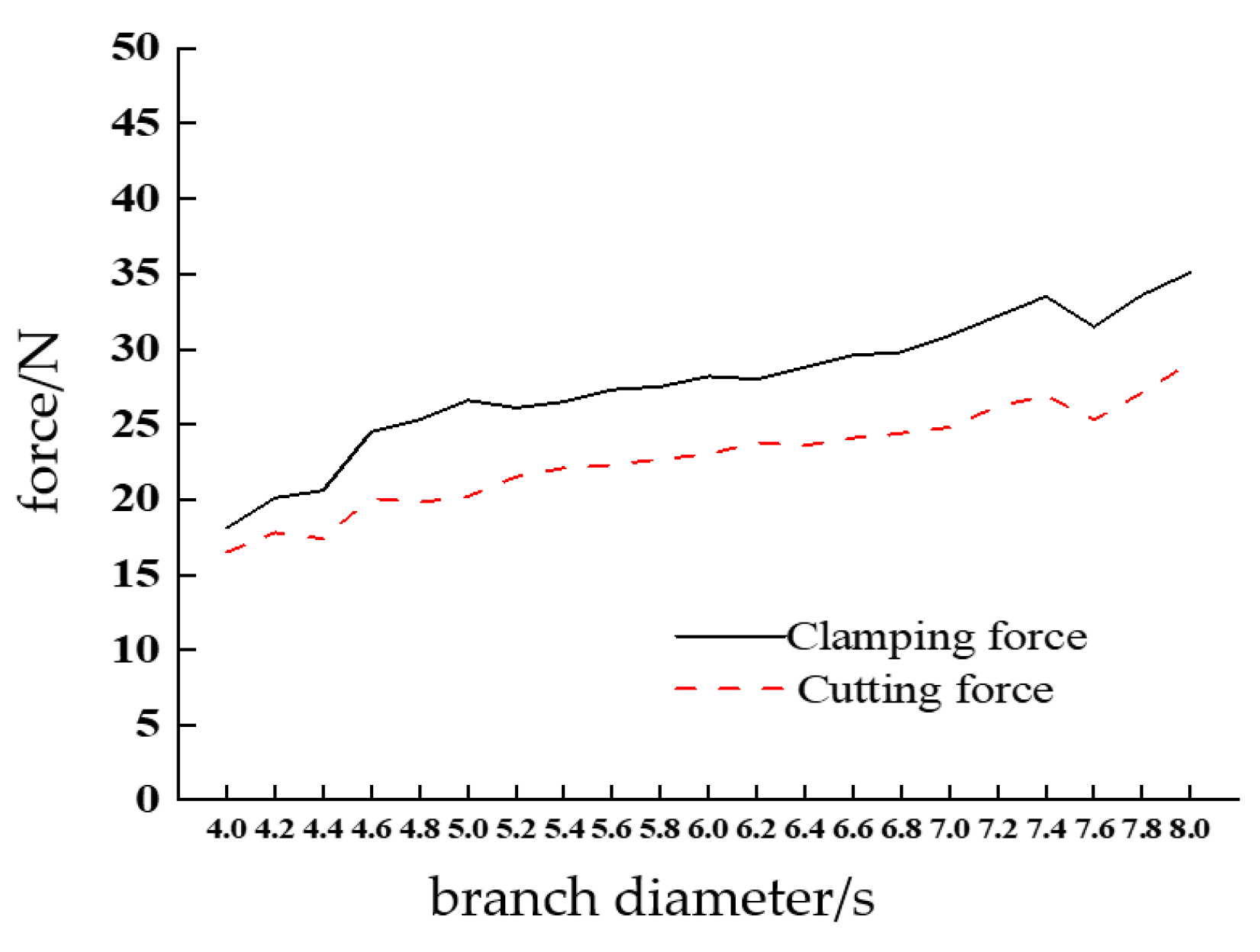
2.2.2. Measurement of Shear Properties
2.2.3. Measurement of Friction Properties
3. Design of Pruning End-Effector
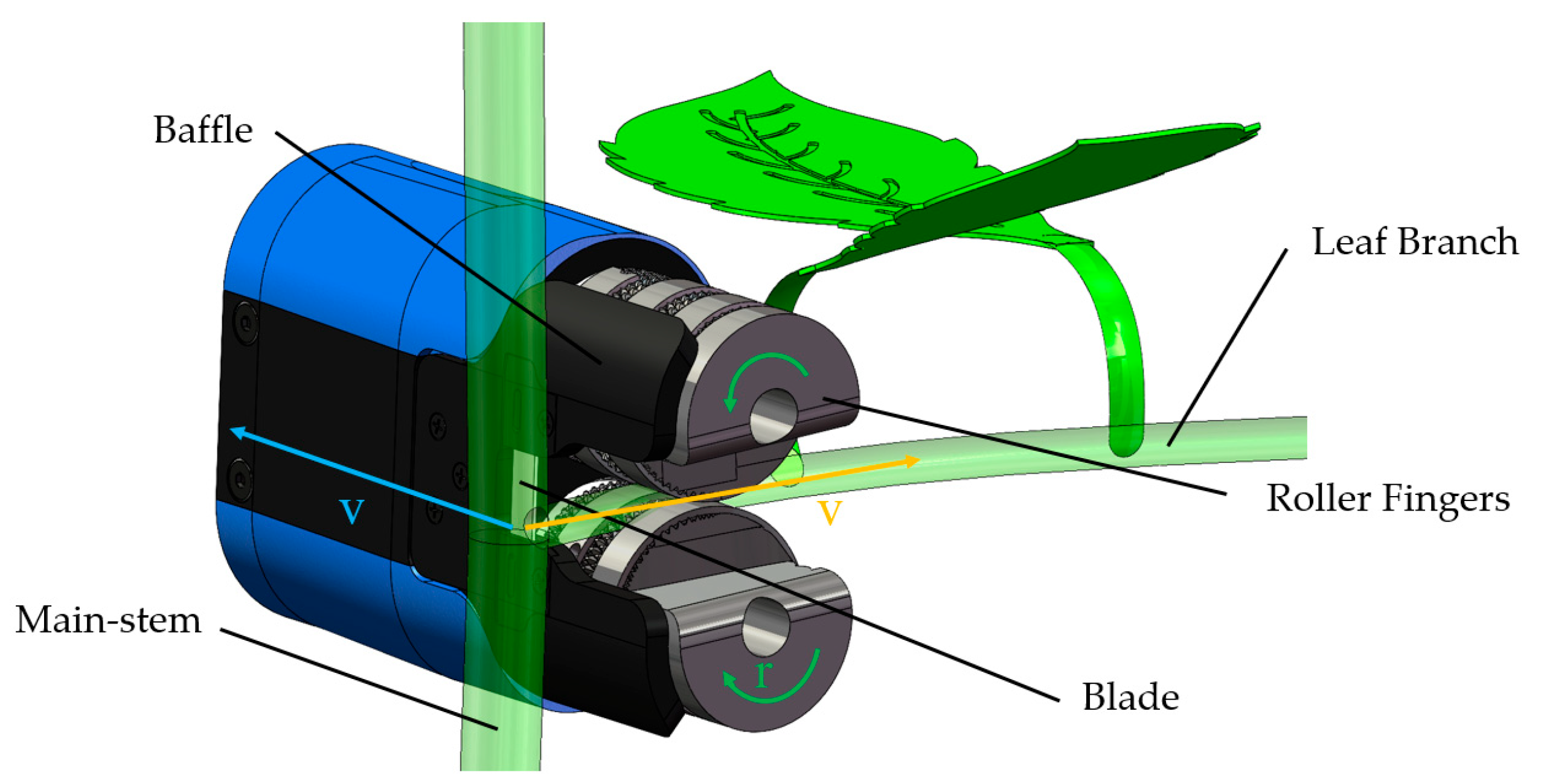
3.1. Overall Composition and Principle
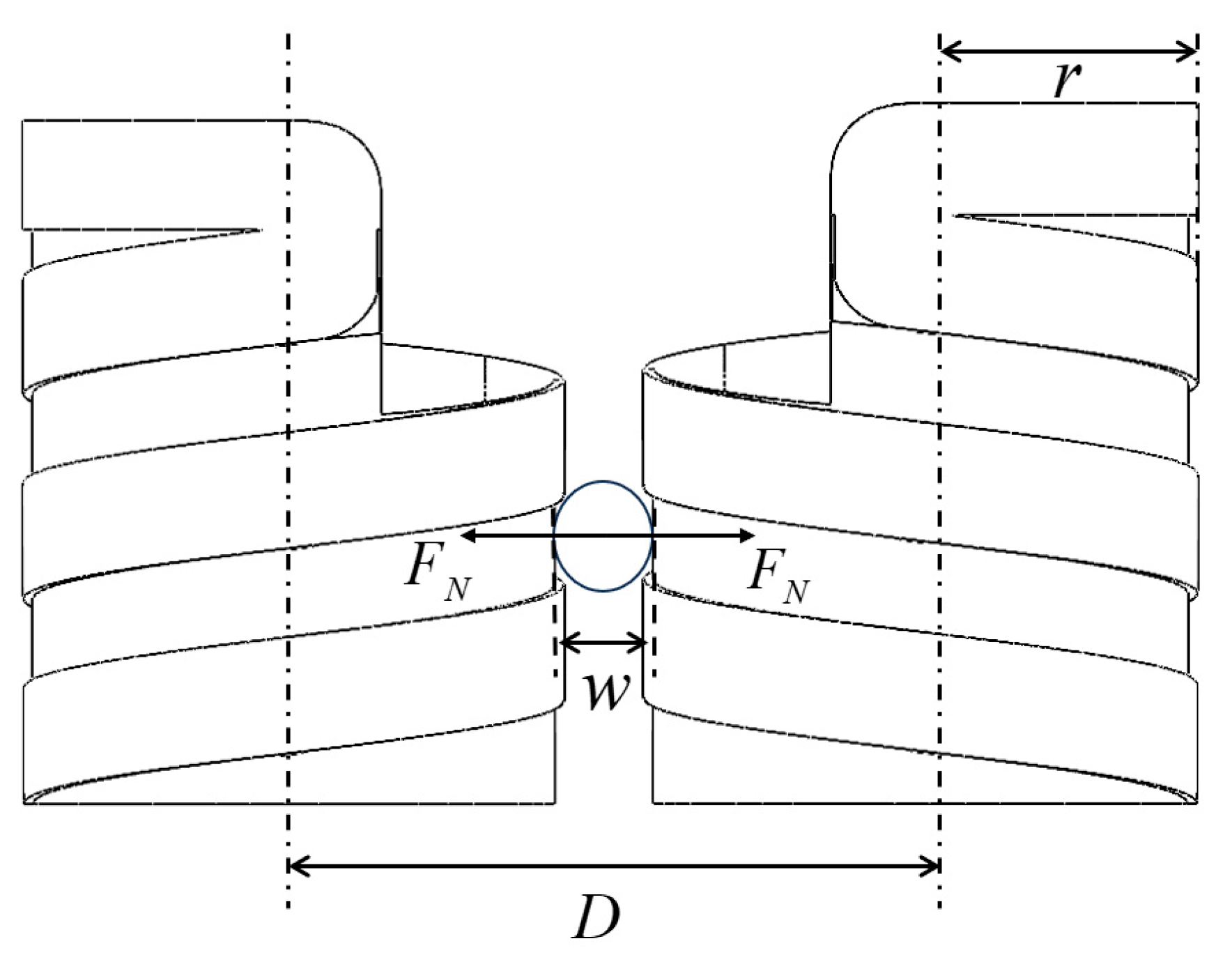
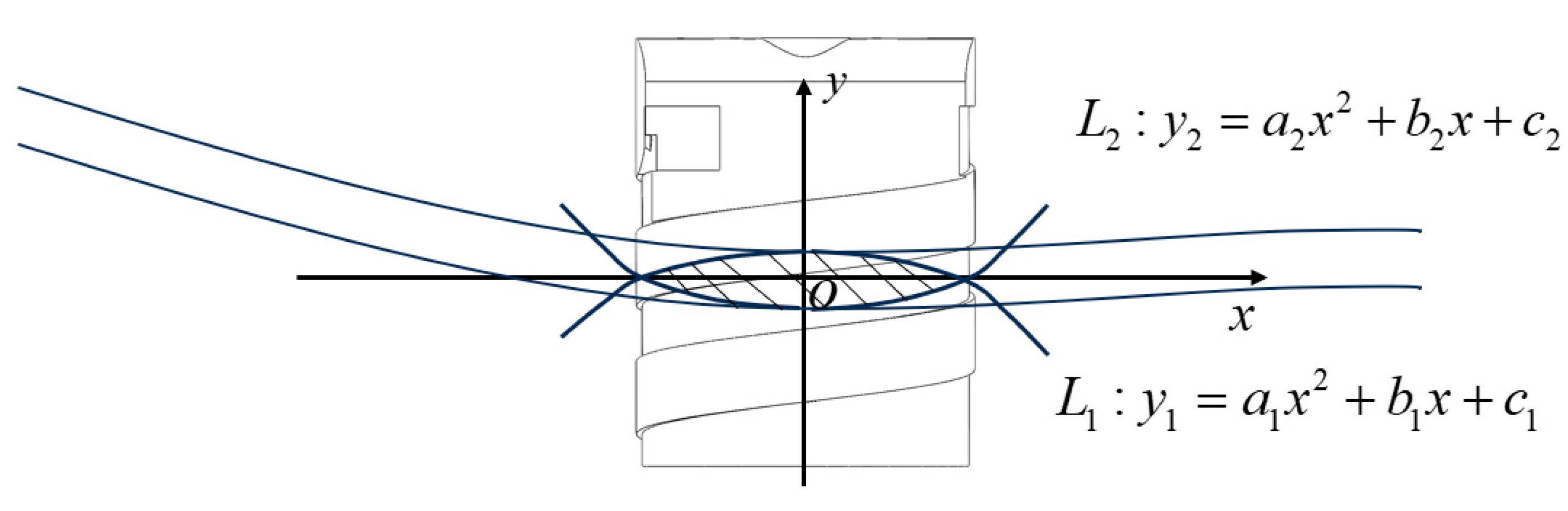
3.2. Branch Traction Part Design
3.3. Branch Cutting Part Design
4. Simulation Experiment
4.1. EDEM Model Establishment
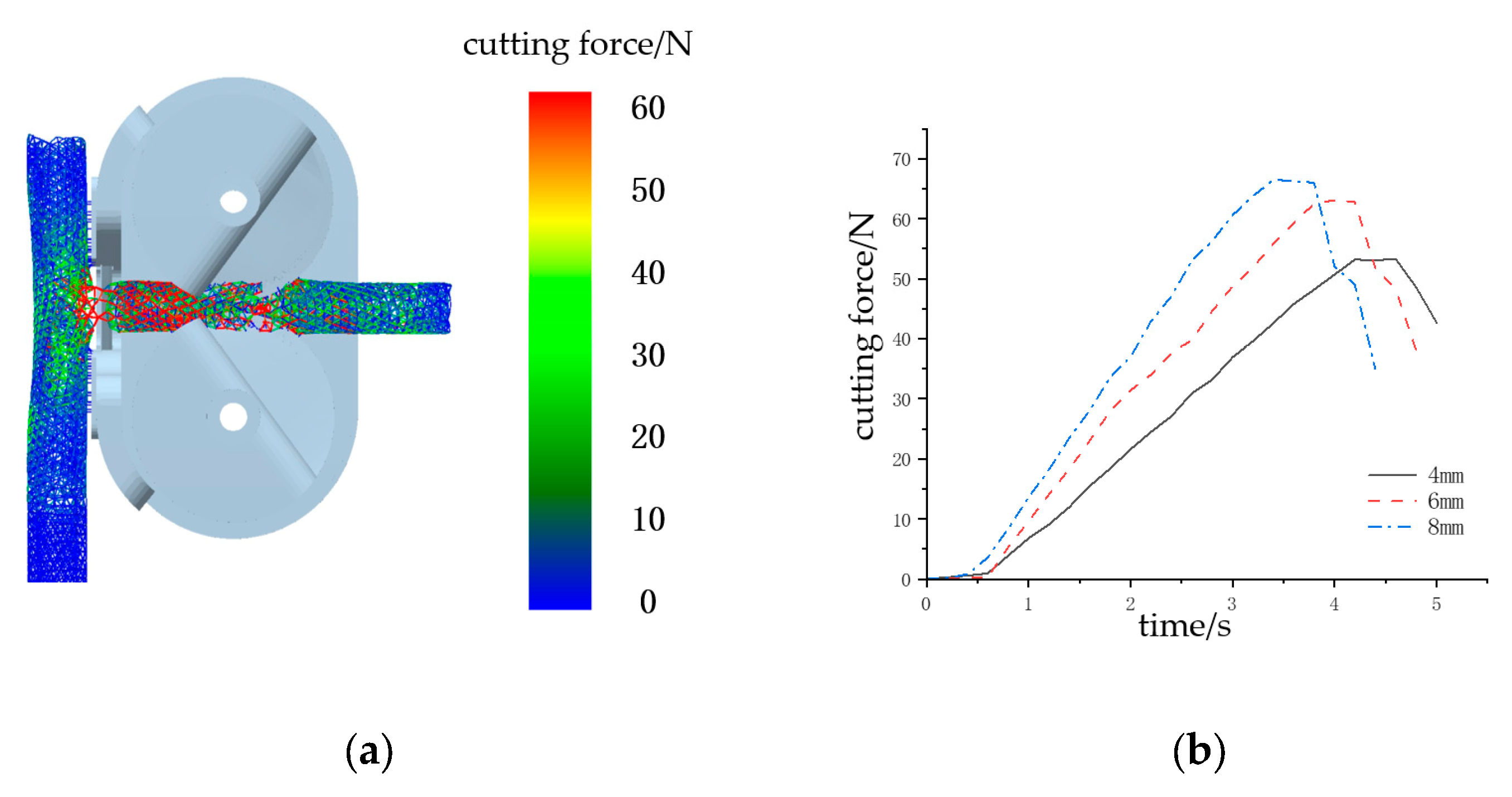
4.2. Pruning Simulation
5. Field Test
5.1. Clamping Test
5.2. Pruning Test
5.3. Results and Discussion
5.3.1. Clamping Test Results
5.3.2. Pruning Test Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Franco, J.L.; Díaz, M.; Diánez, F.; Camacho, F. Influence of different types of pruning on cherry tomato fruit production and quality. J. Food Agric. Environ. 2009, 7, 248–253. [Google Scholar]
- Panno, S.; Davino, S.; Caruso, A.G.; Bertacca, S.; Crnogorac, A.; Mandic, A.; Noris, E.; Matic, S. A Review of the Most Common and Economically Important Diseases That Undermine the Cultivation of Tomato Crop in the Mediterranean Basin. Agronomy 2021, 11, 2188. [Google Scholar] [CrossRef]
- Abdel-Razzak, H.; Wahb-Allah, M.; Ibrahim, A.; Alenazi, M.; Alsadon, A. Response of Cherry Tomato to Irrigation Levels and Fruit Pruning under Greenhouse Conditions. J. Agric. Sci. Technol. 2016, 18, 1091–1103. [Google Scholar]
- Fallah, M.; Delshad, M.; Sheikhi, H. The effects of cluster pruning and the K:N ratio on greenhouse tomato yield and quality. Hortic. Environ. Biotechnol. 2021, 62, 691–700. [Google Scholar] [CrossRef]
- Hanna, H.Y. Influence of Cultivar, Growing Media, and Cluster Pruning on Greenhouse Tomato Yield and Fruit Quality. Horttechnology 2009, 19, 395–399. [Google Scholar] [CrossRef]
- Kong, L.; Wen, Y.X.; Jiao, X.L.; Liu, X.Y.; Xu, Z.G. Interactive regulation of light quality and temperature on cherry tomato growth and photosynthesis. Environ. Exp. Bot. 2021, 182, 104326. [Google Scholar] [CrossRef]
- Maboko, M.M.; Du Plooy, C.P.; Chiloane, S. Effect of plant population, fruit and stem pruning on yield and quality of hydroponically grown tomato. Afr. J. Agric. Res. 2011, 6, 5144–5148. [Google Scholar]
- Dong, X.; Wang, Y.; Yan, Y.; Wang, H. Transcriptome Analysis of the Development of Pedicel Abscission Zone in Tomato. Horticulturae 2022, 8, 865. [Google Scholar] [CrossRef]
- Hu, Y.; Li, X.; Pan, Z.; Tian, S.; Zhang, Y. Pruning Method for Preventing Premature Aging of Tomato, Involves Reserving Axillary Bud at Leaf Axil of Cluster of Tomato Plant, Reserving Two Leaves at Axillary Bud for Pinching, and Removing Axillary Bud of Flower. China Patent CN103181305-B, 9 July 2014. [Google Scholar]
- Piotto, F.A.; Pereira Peres, L.E. Genetic basis of growth habit and flowering in tomato and its importance in agriculture. Cienc. Rural. 2012, 42, 1941–1946. [Google Scholar] [CrossRef]
- Tinoco, V.; Silva, M.F.; Santos, F.N.; Valente, A.; Rocha, L.F.; Magalhaes, S.A.; Santos, L.C. An overview of pruning and harvesting manipulators. Ind. Robot.-Int. J. Robot. Res. Appl. 2022, 49, 688–695. [Google Scholar] [CrossRef]
- Verbiest, R.; Ruysen, K.; Vanwalleghem, T.; Demeester, E.; Kellens, K. Automation and robotics in the cultivation of pome fruit: Where do we stand today? J. Field Robot. 2021, 38, 513–531. [Google Scholar] [CrossRef]
- Zhang, B.; Liu, Y.D.; Zhang, H.M.; Shen, C.J.; Fu, W. Design and Evaluation of a Shaping and Pruning Machine for Dwarf and Densely Planted Jujube Trees. Appl. Sci. 2022, 12, 2699. [Google Scholar] [CrossRef]
- Ma, Y.; Feng, Q.; Sun, Y.; Guo, X.; Zhang, W.; Wang, B.; Chen, L. Optimized Design of Robotic Arm for Tomato Branch Pruning in Greenhouses. Agriculture 2024, 14, 359. [Google Scholar] [CrossRef]
- Zhao, D.-A.; Lv, J.; Ji, W.; Zhang, Y.; Chen, Y. Design and control of an apple harvesting robot. Biosyst. Eng. 2011, 110, 112–122. [Google Scholar] [CrossRef]
- Alam Siddiquee, K.N.e.; Islam, M.S.; Dowla, M.Y.U.; Rezaul, K.M.; Grout, V. Detection, quantification and classification of ripened tomatoes: A comparative analysis of image processing and machine learning. IET Image Process. 2020, 14, 2442–2456. [Google Scholar] [CrossRef]
- Botterill, T.; Paulin, S.; Green, R.; Williams, S.; Lin, J.; Saxton, V.; Mills, S.; Chen, X.Q.; Corbett-Davies, S. A Robot System for Pruning Grape Vines. J. Field Robot. 2017, 34, 1100–1122. [Google Scholar] [CrossRef]
- You, A.; Parayil, N.; Krishna, J.G.; Bhattarai, U.; Sapkota, R.; Ahmed, D.; Whiting, M.; Karkee, M.; Grimm, C.M.; Davidson, J.R. Semiautonomous Precision Pruning of Upright Fruiting Offshoot Orchard Systems An Integrated Approach. IEEE Robot. Autom. Mag. 2023, 30, 10–19. [Google Scholar] [CrossRef]
- Zahid, A.; He, L.; Zeng, L.; Choi, D.; Schupp, J.; Heinemann, P. Development of a robotic end-effector for apple tree pruning. Trans. Asabe 2020, 63, 847–856. [Google Scholar] [CrossRef]
- Xiong, Y.; Ge, Y.Y.; Grimstad, L.; From, P.J. An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation. J. Field Robot. 2020, 37, 202–224. [Google Scholar] [CrossRef]
- Belhadj, B.; Bederina, M.; Montrelay, N.; Houessou, J.; Quéneudec, M. Effect of substitution of wood shavings by barley straws on the physico-mechanical properties of lightweight sand concrete. Constr. Build. Mater. 2014, 66, 247–258. [Google Scholar] [CrossRef]
- Nguyen, T.X.; Le, L.M.; Nguyen, T.C.; Nguyen, N.T.H.; Le, T.T.; Pham, B.T.; Le, V.M.; Ly, H.B. Characterization of soybeans and calibration of their DEM input parameters. Part. Sci. Technol. 2021, 39, 530–548. [Google Scholar] [CrossRef]
- Jelinek, B.; Card, A.; Mason, G.L.; Grebner, K.; Dickerson, A.; Skorupa, T.; Cole, M.; Priddy, J.D. Tractive performance of rigid wheel in granular media using coarse-scale DEM models. J. Terramech. 2025, 117, 101016. [Google Scholar] [CrossRef]
- Kafashan, J.; Wiacek, J.; Ramon, H.; Mouazen, A.M. Modelling and simulation of fruit drop tests by discrete element method. Biosyst. Eng. 2021, 212, 228–240. [Google Scholar] [CrossRef]
- Ma, X.T.; You, Y.; Yang, D.Q.; Wang, D.C.; Hui, Y.T.; Li, D.Y.; Wu, H.H.; Feng, B.W. Alfalfa Stalk Crushing Simulation Test and Parameter Optimization Method. Appl. Sci. 2024, 14, 1323. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Normal Pressure/N | Friction Force/N | Static Friction Coefficient |
|---|---|---|
| 5 | 2.2 | 0.44 |
| 10 | 4.3 | 0.43 |
| 15 | 6.5 | 0.43 |
| 20 | 8.7 | 0.44 |
| Material Parameters | Value |
| Poisson’s ratio of tomato stem particles | 0.4 |
| Density of tomato stem particles (kg/m3) | 800 |
| Shear modulus of tomato stem particles (Pa) | 1 × 107 |
| Contact Parameters | Value |
| Stem-blade restitution coefficient | 0.3 |
| Stem-blade static friction coefficient | 0.35 |
| Contact model parameters | Value |
| Normal Stiffness per unit area (N/m3) | 9 × 109 |
| Normal Strength (Pa) | 2 × 109 |
| Shear Strength (Pa) | 1 × 109 |
| Branch Diameter/mm | Tests Number | Successes Number | Average Residual Length/mm | Success Rate |
|---|---|---|---|---|
| 4–6 | 25 | 19 | 8.5 | 76% |
| 6–8 | 25 | 23 | 4.4 | 92% |
| 8–10 | 25 | 22 | 3.8 | 88% |
| 10–12 | 25 | 21 | 6.5 | 84% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Lu, W.; Feng, Q.; He, L.; Diao, H.; Ma, Y.; Chen, L. Leaf Pruning End-Effector for Adaptive Positioning at the Branch–Stem Junction of Tomato Plants. Agriculture 2024, 14, 2281. https://doi.org/10.3390/agriculture14122281
Sun Y, Lu W, Feng Q, He L, Diao H, Ma Y, Chen L. Leaf Pruning End-Effector for Adaptive Positioning at the Branch–Stem Junction of Tomato Plants. Agriculture. 2024; 14(12):2281. https://doi.org/10.3390/agriculture14122281
Chicago/Turabian StyleSun, Yuhuan, Wenqiao Lu, Qingchun Feng, Liang He, Hongda Diao, Yuhang Ma, and Liping Chen. 2024. "Leaf Pruning End-Effector for Adaptive Positioning at the Branch–Stem Junction of Tomato Plants" Agriculture 14, no. 12: 2281. https://doi.org/10.3390/agriculture14122281
APA StyleSun, Y., Lu, W., Feng, Q., He, L., Diao, H., Ma, Y., & Chen, L. (2024). Leaf Pruning End-Effector for Adaptive Positioning at the Branch–Stem Junction of Tomato Plants. Agriculture, 14(12), 2281. https://doi.org/10.3390/agriculture14122281