
Digital Twins and Data-Driven in Plant Factory: An Online Monitoring Method for Vibration Evaluation and Transplanting Quality Analysis

Abstract
1. Introduction
2. Materials and Methods
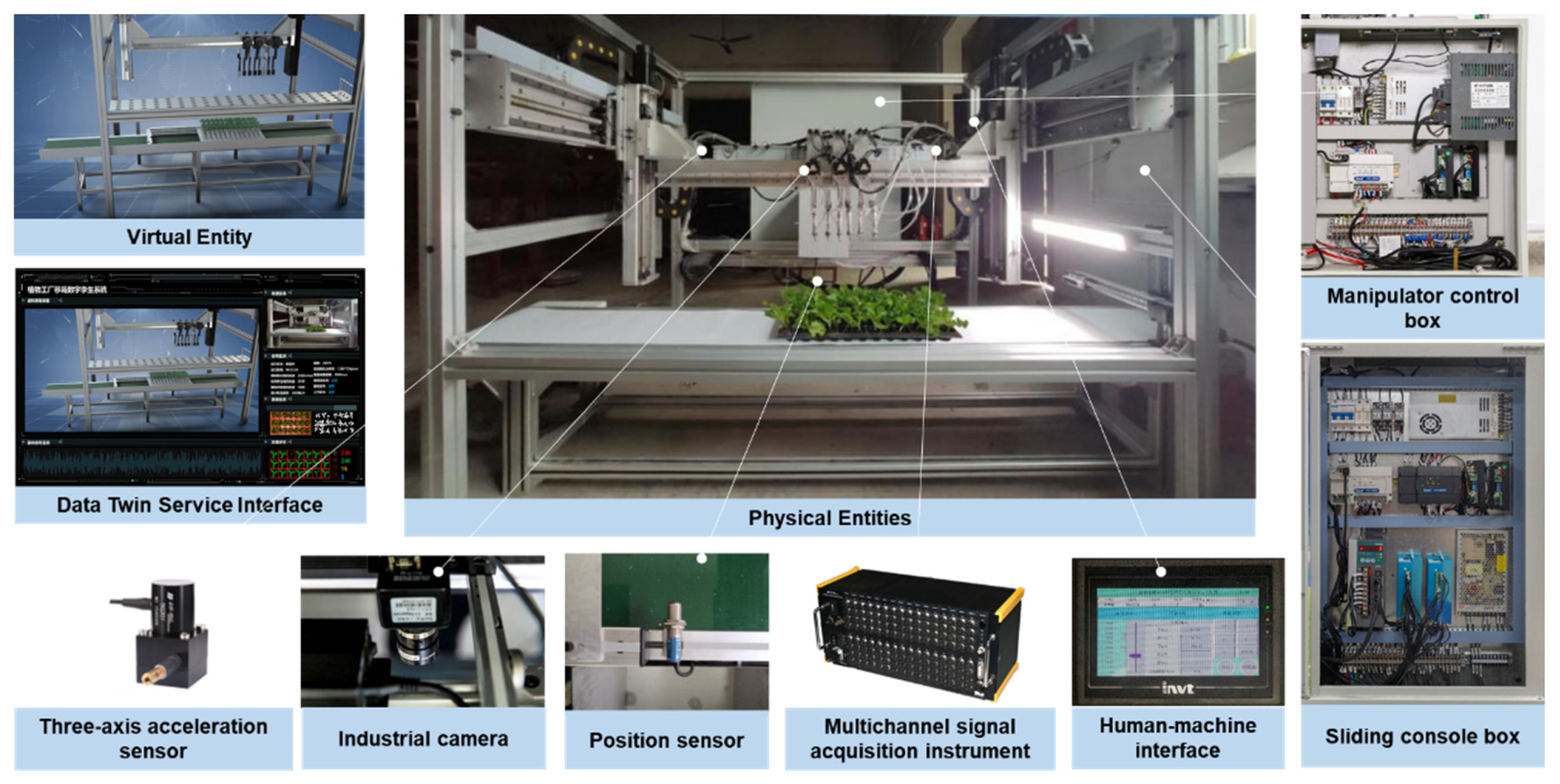
2.1. Framework
2.2. Multi-Domain Model Implementation of Plant Factory Transplanting System
- Transplanting conditions: When it comes to transplanting, there are several critical parameters that must be taken into consideration. These parameters include the spindle motor speed, the vibration signal above the transplanting manipulator, and the role signal. These parameters are controlled by the PFT controller and have a direct impact on the simulation results of the transplanting process.
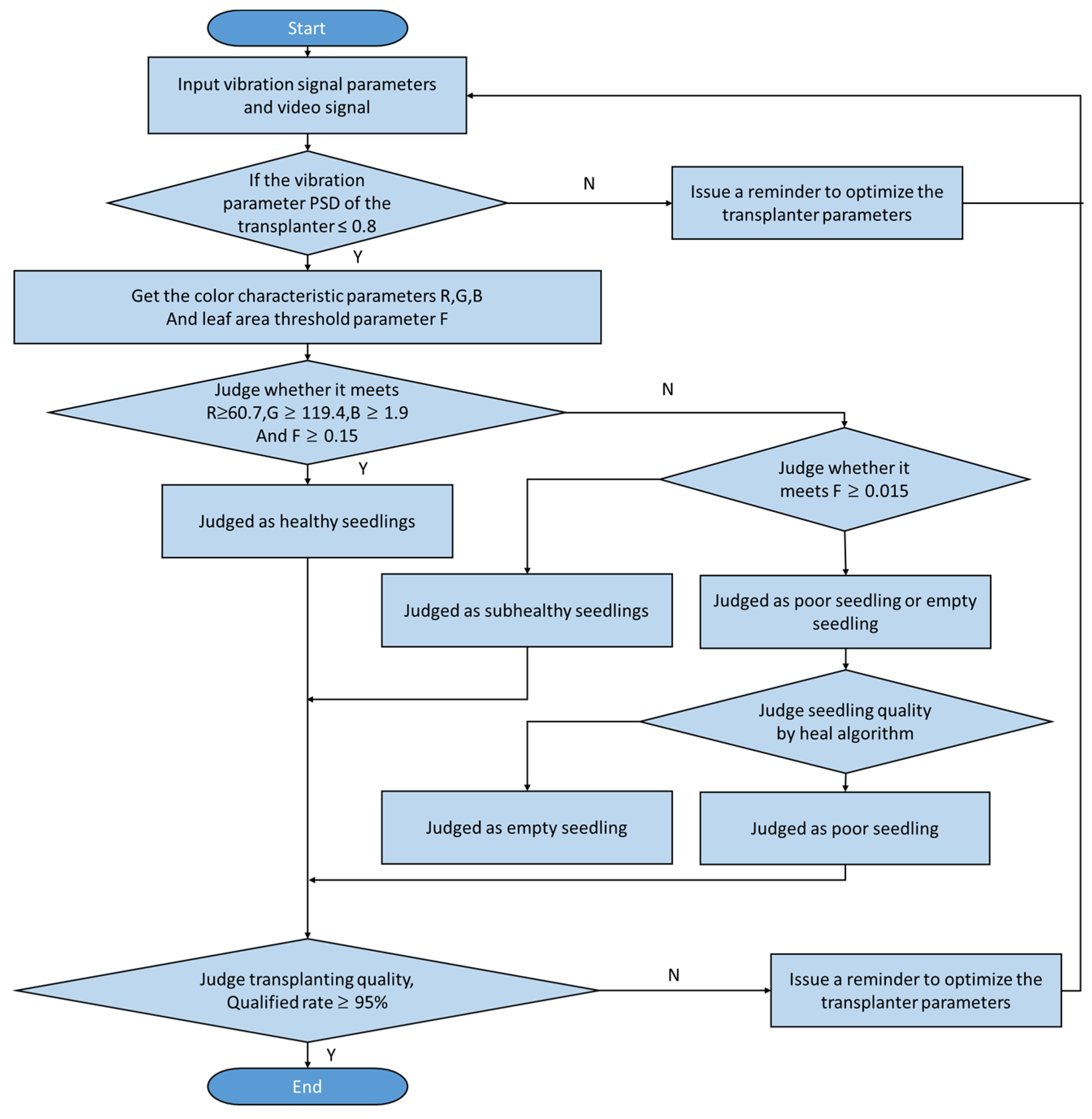
- Evaluation of the transplanting effect: The evaluation and assessment of the picture sign of the transplanting seedling tray for the duration of the transplanting process and performs a function of remarks adjustment to alter the parameters of the transplanting platform.
2.3. Data-Driven Model Implementation and Dataset Description
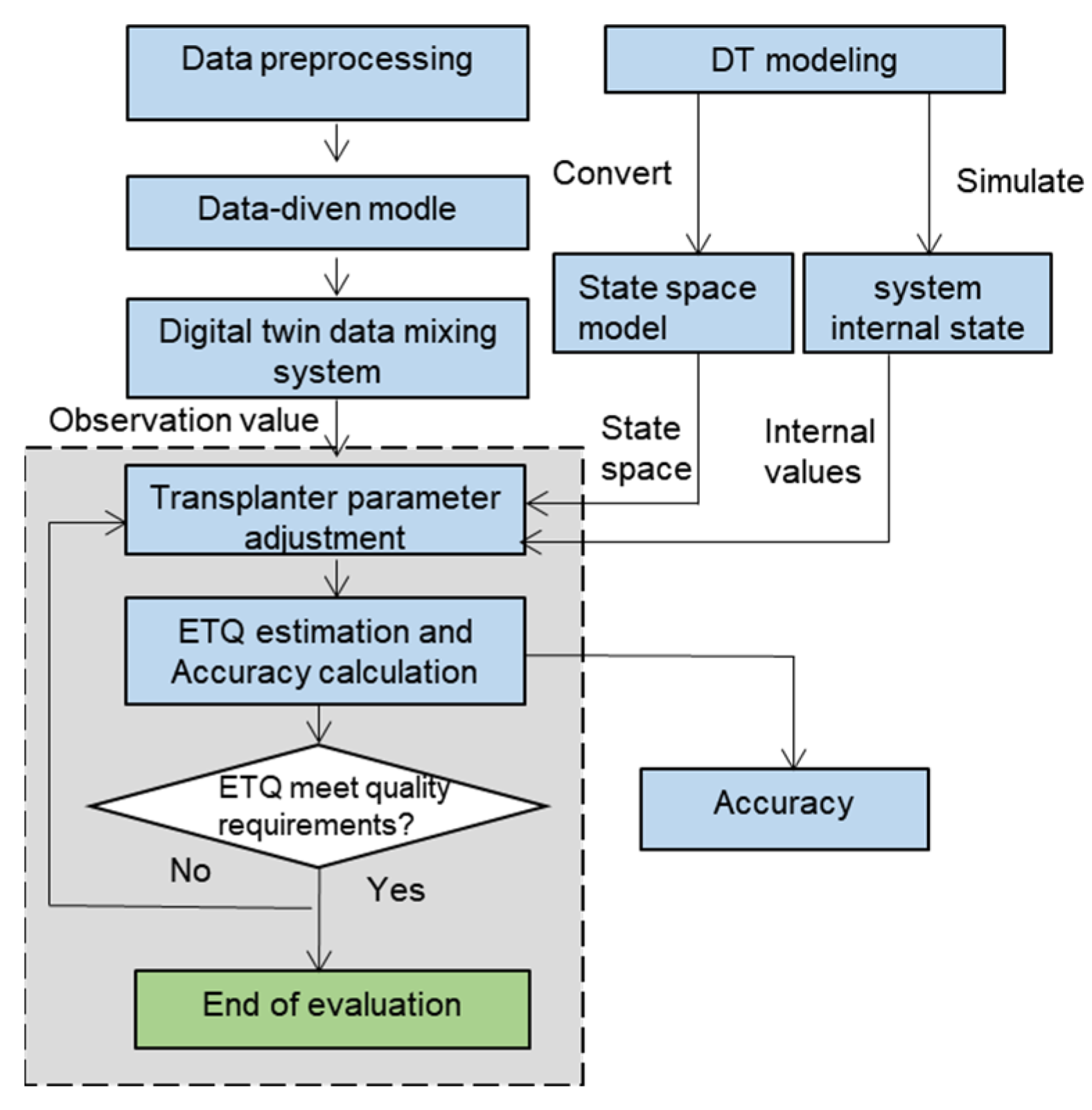
2.4. A Hybrid Evaluation Method Based on DT Model and Data-Driven Transplanting Effect
2.5. Development and Configuration of the Digital Twin Service System
3. Results and Discussions
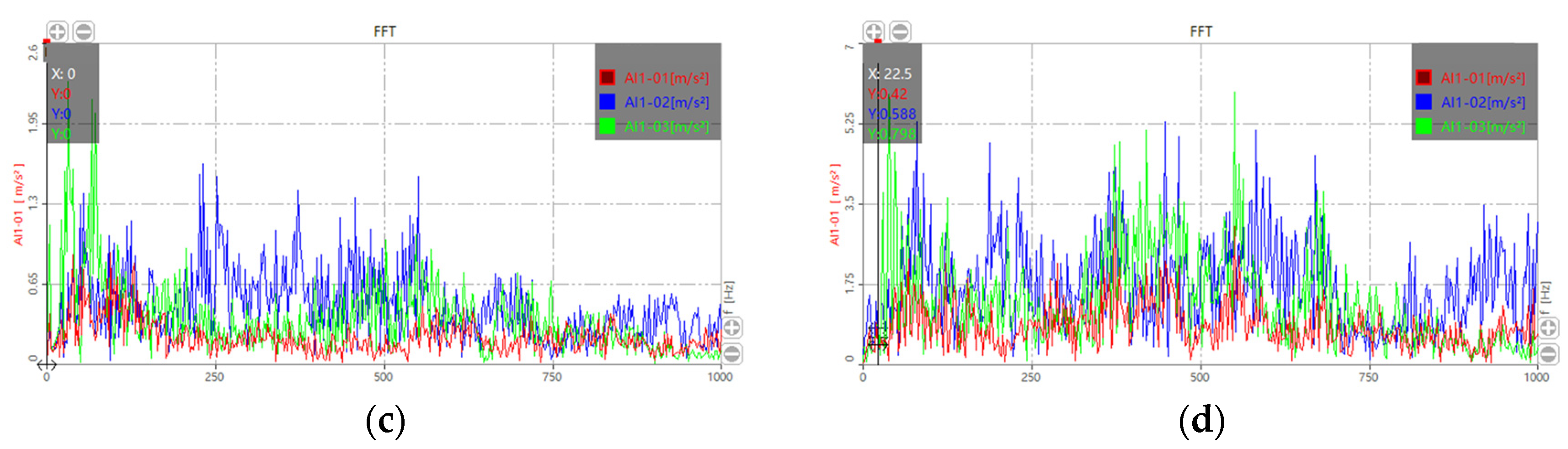
3.1. Data-Driven Comparative Analysis of Plant Factory Transplanting Equipment Working Conditions
3.2. Comparative Analysis of Real-Time Image Processing Effects of Transplanting Potted Seedlings
3.3. Evaluation of Transplanting Effects with Digital Twin Virtual Mapping Reproduction
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; Zubko, V.; Onychko, V.; Zhao, M. Development status and trend of plant factory intelligence in China. Sci. Bulletin. Ser. F Biotechnol. 2022, 26, 65–70. [Google Scholar]
- Van Henten, E.J. Automation and Robotics in Greenhouses; Marcelis, L., Heuvelink, E., Eds.; Burleigh Dodds Science Publishing: Cambridge, UK, 2019; Volume 63, pp. 359–378. [Google Scholar] [CrossRef]
- Liu, Y.; Mousavi, S.; Pang, Z.; Ni, Z.; Karlsson, M.; Gong, S. Plant Factory: A New Playground of Industrial Communication and Computing. Sensors 2022, 22, 147. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.; Li, D. EPSA-YOLO-V5s: A novel method for detecting the survival rate of rapeseed in a plant factory based on multiple guarantee mechanisms. Comput. Electron. Agric. 2022, 193, 106714. [Google Scholar] [CrossRef]
- Sun, J.; Sun, W.; Zhang, G.; Lv, B.; Li, C. High efficient production of plant flavonoids by microbial cell factories: Challenges and opportunities. Metab. Eng. 2022, 70, 143–154. [Google Scholar] [CrossRef] [PubMed]
- Rahul, K.; Raheman, H.; Paradkar, V. Design and development of a 5R 2DOF parallel robot arm for handling paper pot seedlings in a vegetable transplanter. Comput. Electron. Agric. 2019, 166, 105014. [Google Scholar] [CrossRef]
- Jin, X.; Tang, L.; Li, R.; Zhao, B.; Ji, J.; Ma, Y. Edge recognition and reduced transplantation loss of leafy vegetable seedlings with Intel RealsSense D415 depth camera. Comput. Electron. Agric. 2022, 198, 107030. [Google Scholar] [CrossRef]
- Jin, X.; Yuan, Y.; Ji, J.; Zhao, K.; Li, M.; Chen, K. Design and implementation of anti-leakage planting system for transplanting machine based on fuzzy information. Comput. Electron. Agric. 2020, 169, 105204. [Google Scholar] [CrossRef]
- Tong, J.; Qiu, Z.; Zhou, H.; Bashir, M.K.; Yu, G.; Wu, C.; Du, X. Optimizing the path of seedling transplanting with multi-end effectors by using an improved greedy annealing algorithm. Comput. Electron. Agric. 2022, 201, 107276. [Google Scholar] [CrossRef]
- Yang, Q.; Ahmad, I.; Faheem, M.; Siddique, B.; Xu, H.; Addy, M. Development and assessment of belt-drive seedlings transmission device for fully-automatic vegetable transplanter. Comput. Electron. Agric. 2021, 182, 105958. [Google Scholar] [CrossRef]
- Fu, W.; Gao, J.; Zhao, C.; Jiang, K.; Zheng, W.; Tian, Y. Detection Method and Experimental Research of Leafy Vegetable Seedlings Transplanting Based on a Machine Vision. Agronomy 2022, 12, 2899. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, X.; Li, T.; Gan, R.; Wang, Z.; Peng, J.; Hu, J.; Guo, J.; Zhang, Y.; Li, Q.; et al. Plant factory technology lights up urban horticulture in the post-coronavirus world. Hortic. Res. 2022, 9, uhac018. [Google Scholar] [CrossRef] [PubMed]
- Ji, J.T.; Chen, K.K.; Jin, X.; Pang, J.; Chen, X.; Wang, Z.Y.; Fan, J.Y. Research on the Beam Damage Diagnosis Method for a High-Speed Transplanter Based on the Strain Mode. Appl. Eng. Agric. 2021, 37, 25–32. [Google Scholar] [CrossRef]
- Ji, J.; Chen, K.; Jin, X.; Wang, Z.; Dai, B.; Fan, J.; Lin, X. High-efficiency modal analysis and deformation prediction of rice transplanter based on effective independent method. Comput. Electron. Agric. 2020, 168, 105126. [Google Scholar] [CrossRef]
- Wang, X.; Vladislav, Z.; Viktor, O.; Wu, Z.; Zhao, M. Online recognition and yield estimation of tomato in plant factory based on YOLOv3. Sci. Rep. 2022, 12, 8686. [Google Scholar] [CrossRef]
- Wang, X.; Wu, Z.; Jia, M.; Xu, T.; Pan, C.; Qi, X.; Zhao, M. Lightweight SM-YOLOv5 Tomato Fruit Detection Algorithm for Plant Factory. Sensors 2023, 23, 3336. [Google Scholar] [CrossRef]
- Ariesen-Verschuur, N.; Verdouw, C.; Tekinerdogan, B. Digital Twins in greenhouse horticulture: A review. Comput. Electron. Agric. 2022, 199, 107183. [Google Scholar] [CrossRef]
- Zhao, Y.; Lian, L.; Bi, C.; Xu, Z. Digital twin for rapid damage detection of a fixed net panel in the sea. Comput. Electron. Agric. 2022, 200, 107247. [Google Scholar] [CrossRef]
- Pylianidis, C.; Osinga, S.; Athanasiadis, I.N. Introducing digital twins to agriculture. Comput. Electron. Agric. 2021, 184, 105942. [Google Scholar] [CrossRef]
- Verdouw, C.; Tekinerdogan, B.; Beulens, A.; Wolfert, S. Digital twins in smart farming. Agric. Syst. 2021, 189, 103046. [Google Scholar] [CrossRef]
- Tao, F.; Cheng, J.; Qi, Q.; Zhang, M.; Zhang, H.; Sui, F. Digital twin-driven product design, manufacturing and service with big data. Int. J. Adv. Manuf. Technol. 2018, 94, 3563–3576. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, M.; Cheng, J.; Qi, Q. Digital twin workshop: A new paradigm for future workshop. Comput. Integr. Manuf. Syst. 2017, 23, 1–9. [Google Scholar]
- Luo, W.; Hu, T.; Ye, Y.; Zhang, C.; Wei, Y. A hybrid predictive maintenance approach for CNC machine tool driven by Digital Twin. Robot. Comput.-Integr. Manuf. 2020, 65, 101974. [Google Scholar] [CrossRef]
- Tao, F.; Sui, F.; Liu, A.; Qi, Q.; Zhang, M.; Song, B.; Guo, Z.; Lu, S.C.Y.; Nee, A.Y.C. Digital twin-driven product design framework. Int. J. Prod. Res. 2019, 57, 3935–3953. [Google Scholar] [CrossRef]
- Zhuang, C.; Liu, J.; Xiong, H.; Ding, X.; Liu, S.; Weng, G. Connotation, architecture and trends of product digital twin. Comput. Integr. Manuf. Syst. 2017, 23, 753–768. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work Condition Serial Number | Working Status | Type of Data | Acquisition Frequency |
|---|---|---|---|
| 1 | Standby Start-up | Vibration D1 | 2560 Hz |
| Transverse motor power D2 | 50 Hz | ||
| Vertical motor power D3 | 50 Hz | ||
| Parallel motor power D4 | 50 Hz | ||
| 2 | Low speed transplant 1500 plants/h | Vibration D1 | 2560 Hz |
| Transverse motor power D2 | 50 Hz | ||
| Vertical motor power D3 | 50 Hz | ||
| Parallel motor power D4 | 50 Hz | ||
| 3 | Medium speed transplant 3000 plants/h | Vibration D1 | 2560 Hz |
| Transverse motor power D2 | 50 Hz | ||
| Vertical motor power D3 | 50 Hz | ||
| Parallel motor power D4 | 50 Hz | ||
| 4 | High speed transplant 4500 plants/h | Vibration D1 | 2560 Hz |
| Transverse motor power D2 | 50 Hz | ||
| Vertical motor power D3 | 50 Hz | ||
| Parallel motor power D4 | 50 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, K.; Yuan, Y.; Zhao, B.; Zhou, L.; Niu, K.; Jin, X.; Gao, S.; Li, R.; Guo, H.; Zheng, Y. Digital Twins and Data-Driven in Plant Factory: An Online Monitoring Method for Vibration Evaluation and Transplanting Quality Analysis. Agriculture 2023, 13, 1165. https://doi.org/10.3390/agriculture13061165
Chen K, Yuan Y, Zhao B, Zhou L, Niu K, Jin X, Gao S, Li R, Guo H, Zheng Y. Digital Twins and Data-Driven in Plant Factory: An Online Monitoring Method for Vibration Evaluation and Transplanting Quality Analysis. Agriculture. 2023; 13(6):1165. https://doi.org/10.3390/agriculture13061165
Chicago/Turabian StyleChen, Kaikang, Yanwei Yuan, Bo Zhao, Liming Zhou, Kang Niu, Xin Jin, Shengbo Gao, Ruoshi Li, Hao Guo, and Yongjun Zheng. 2023. "Digital Twins and Data-Driven in Plant Factory: An Online Monitoring Method for Vibration Evaluation and Transplanting Quality Analysis" Agriculture 13, no. 6: 1165. https://doi.org/10.3390/agriculture13061165
APA StyleChen, K., Yuan, Y., Zhao, B., Zhou, L., Niu, K., Jin, X., Gao, S., Li, R., Guo, H., & Zheng, Y. (2023). Digital Twins and Data-Driven in Plant Factory: An Online Monitoring Method for Vibration Evaluation and Transplanting Quality Analysis. Agriculture, 13(6), 1165. https://doi.org/10.3390/agriculture13061165