1. Introduction
Crab (also known as hairy crab) is widely favored by consumers for its delicate meat, delicious taste, rich nutrition, and easy cooking [
1]. In the past 50 years, global aquaculture output has been increasing continuously. The pond culture of crab has become the main aquaculture mode, with a relatively independent aquaculture system, a good feed conversion rate, stable yield, and harvest scale. Artificial feed for crab breeding mainly includes frozen fish, bean cakes, corn, wheat, compound feed, etc. [
2]. Among them, bait such as frozen fish is sticky to some extent, which easily causes blockage of the bait at the discharging outlet. It is difficult to achieve uniform discharging and the bait cannot be put on existing baiting equipment. Generally, the bait needs to be put on manually [
3].
At present, it is difficult for the feeding equipment used in the market for crab aquaculture to achieve uniform, continuous and complete feeding of viscous baits, while the manual feeding method is inefficient and uneven. Due to the aggressive nature of crab, it has strong territorial awareness. Excessive feeding will lead to fighting among crabs, causing crab disability and even death, affecting its quality and yield. Uneven and excessive feeding will lead to regional excesses of food, which can cause water pollution and is not conducive to the growth and development of river crab [
4,
5]. In this paper, the feeding process of viscous miscellaneous fish granule bait was analyzed by a numerical model, and the main factors affecting the uniformity of the feeding were obtained. The optimum design of the feeding device was carried out by combining the simulation and experimental results to realize the uniform feeding of the ice and fresh miscellaneous fish bait and solve the problem of high labor costs and low efficiency when baiting manually. It can also be used in other aquaculture fields.
At present, EDEM software is widely used to simulate and analyze important information such as speed, trajectory, and force of material particles under different working conditions. For example, in 2019, Qiu Junlin and others used the discrete element simulation software EDEM to design particle templates based on the BPM model theory and Hertz–Mindlin with bonding contact model [
6]. In 2022, Qiu Yi et al. established a simulation model of ice grass seed by discrete element software EDEM and used discrete coefficient as an evaluation index to study the influence of vibration frequency, rotational speed, and inclination angle of the coating pan on the mixing uniformity of seed powder [
7]. In 2022, Yin Shiyang and others established the peanut pod particle model with an ovary handle. EDEM software was used to simulate the process of cutting the handle of the device, and eight groups of serrated disc cutters were determined to have the best arrangement effect [
8].
At the same time, many researchers carried out EDEM simulation experiments to optimize the mechanical structure. In 2022, Tian Yaya et al. used EDEM to simulate the process of mulberry leaf spreading and feeding of the small silkworm co-rearing feeder and adjusted and optimized the structure parameters of the feeder according to the simulation results [
9]. In 2021, Liu Lijing et al. designed a deep loosening full layer fertilizer shovel, established a discrete element simulation model of a deep loosening full layer fertilizer shovel using EDEM, simulated the working process of deep loosening full layer fertilizer shovel, and optimized the working parameters through a simulation analysis [
10]. In 2020, Gong et al. used discrete element software to establish a coupling model of fry-mechanical components. Liu Hu et al. used EDEM to establish a fish-fry mechanical component coupling simulation model. The working parameters of the sorter were used as test factors, and the sorting efficiency and the accuracy of fish sorting were used as evaluation indicators to carry out the simulation optimization [
11].
In order to determine the influence of different factors on the feeding results, EDEM software was used to simulate and analyze the feeding process of viscous miscellaneous fish bait under different discharging inlet sizes, silo inclination angles, and increasing stirring device conditions, and the effects of various parameters on feeding uniformity and continuity were obtained. Based on this, the silo structure and mixing device were optimized, simulation and prototype experiments were carried out, and the experimental results were compared with the simulation results to determine the feasibility.
2. Materials and Methods
2.1. Applied Software
EDEM software (Version No. 2019.1) is the first multi-purpose discrete element method modeling software in the world, which can be used for simulation and analysis of particle treatment and production process of manufacturing equipment in industrial production.
SolidWorks software (Version No. 2018 SP5.0) is the first three-dimensional CAD system based on Windows in the world. It has three features: powerful, easy to learn and use, and technical innovation, which makes SolidWorks the leading and mainstream three-dimensional CAD solution.
Origin software (Version No. 2019b) is a scientific mapping and data analysis software developed by OriginLab Company, which supports the operation under Microsoft Windows. Origin supports a wide range of 2D/3D graphics. Data analysis functions in Origin include statistics, signal processing, curve fitting and peak analysis. The curve fitting in Origin is based on Levernberg–Marquardt algorithm (LMA).
2.2. Particle Model of Miscellaneous Fish Bait
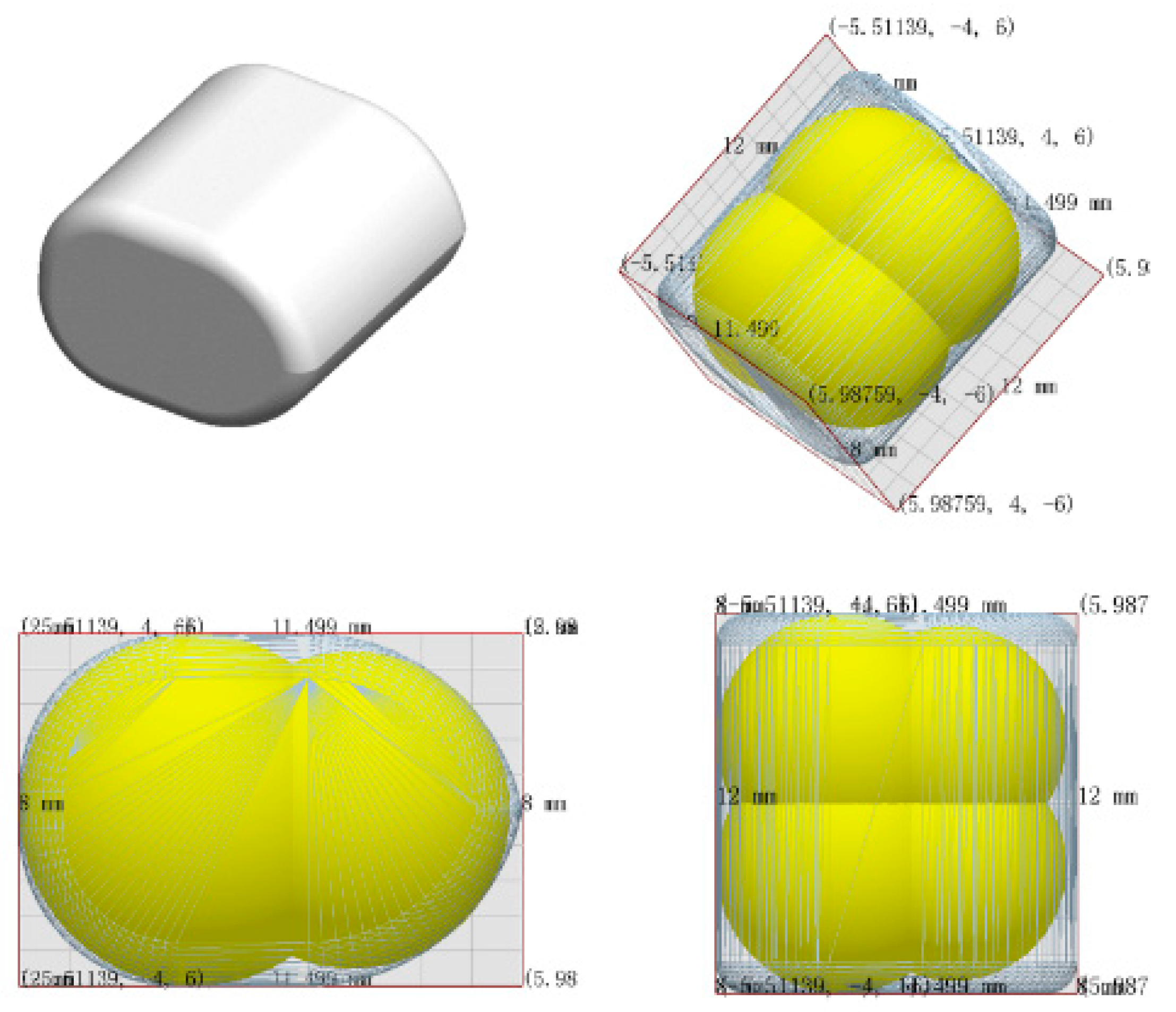
The main purpose of discrete element simulation (DEM) in this paper was to study the feeding condition of viscous fish particle bait in the feeding device and to develop a device that can realize the uniform feeding of viscous bait. Therefore, the simulation object was mainly viscous fish particles, and the geometry of the feeding device was in direct contact with them. For the discharging device studied in this paper, the parts which have direct contact with the frozen and miscellaneous fish particles need to be imported into the EDEM simulation system. Because the bait of fresh and mixed fish particles is comprised of non-standard particles with irregular shapes after passing through the crusher, in order to improve the simulation efficiency, the simulation model of the fresh and mixed fish particles is simplified, and the shape of the fresh and mixed fish particles is simplified to a single shape. The particle model of the mixed fish bait created by the Particles tool is made up of four spheres which are crossed and spliced together [
12]. The simplified model and filling effect of miscellaneous fish bait particles are shown in
Figure 1.
The model parameters required for JKR model simulation in EDEM are divided into three categories: the first is material characteristic parameters, the second is material contact parameters, and the third is surface energy parameters. Before the simulation, the above parameters need to be confirmed and calibrated.
2.3. Geometric Model of Baiting Device
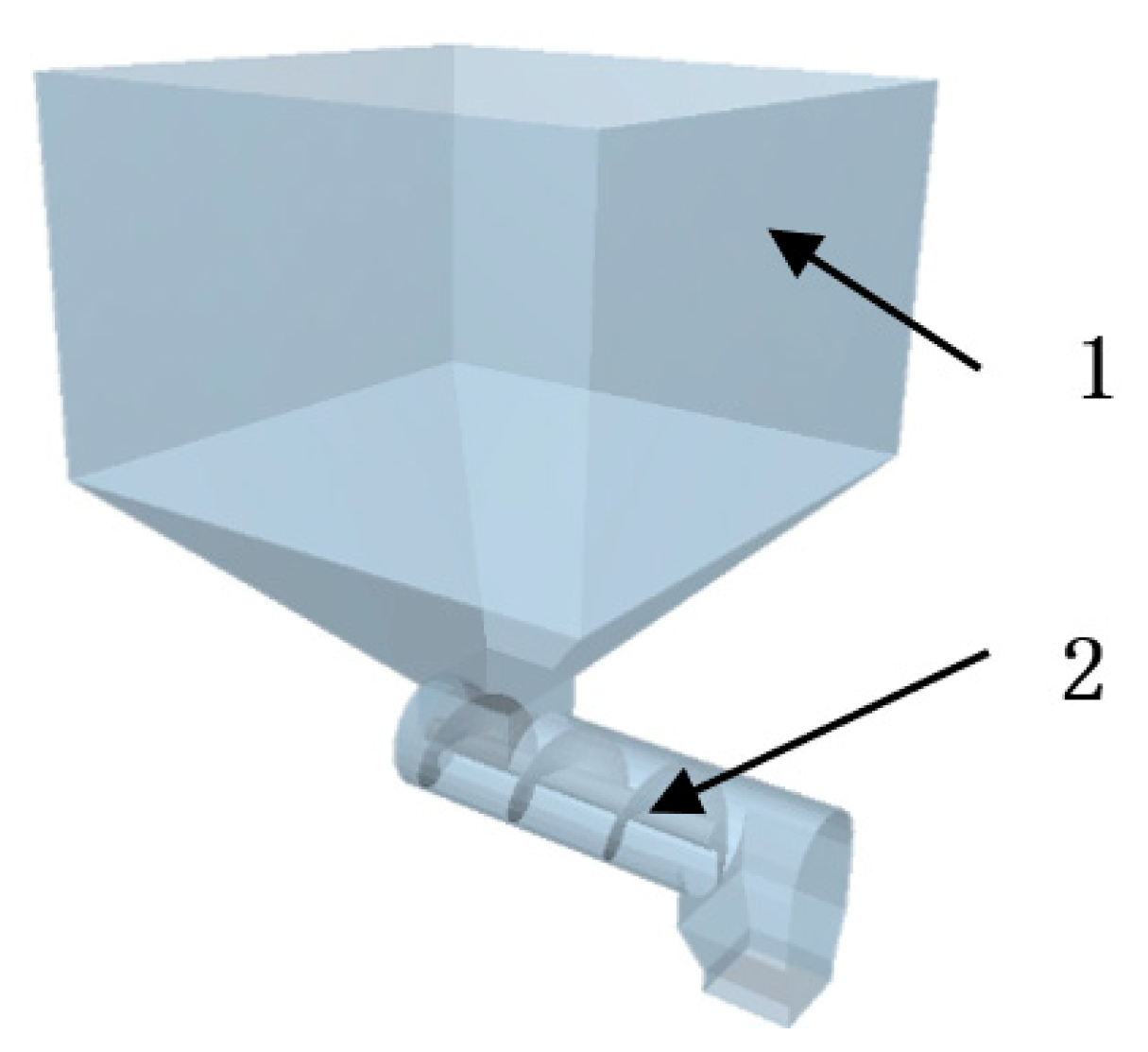
Warehouses and winches are widely used in agricultural machinery. The winch is a spiral conveying device. The rotating winch is used to move material forward at a uniform speed until the discharging outlet is uniform. In this paper, the square warehouse is used as the research object. Use SolidWorks software to build a three-dimensional model of bait feeding device, remove unnecessary rounded corners and other characteristics, then import into EDEM software as shown in
Figure 2, in which the bin volume is 105 L and the inclination is 45 degrees. Because only the seed filling process was studied in the simulation experiment, the geometric model was simplified, and only the silo and winch were included in the simulation environment, thus reducing the calculation amount in the simulation process.
In the simulation and physical experiment of the bait discharging process, the rotational speed of the screw conveyor is set at 18 rpm. Both silos and winches are made of 304 stainless steel.
2.4. Contact Mode and Parameter Setting
In this paper, numerical simulation analysis software is used as EDEM simulation software, which is often used to study the interaction between bulk materials and agricultural machinery components. The simulation principle of EDEM software is based on the discrete element method (DEM), which was first proposed by Dr. Peter Cundall in 1971 on the basis of molecular dynamics [
13,
14]. According to the contact mode of particles, the discrete elements can be divided into hard particle contact and soft particle contact [
15]. The contact model is divided into dry and wet particles according to the additional resistance of the particles when moving [
16], and Hertz–Mindlin with the JKR model is suitable for simulating wet particles or bonding due to external forces [
17,
18]. The icy and fresh fish particles studied in this paper are wet grain baits and have certain viscosities. Therefore, the contact model was selected as Hertz–Mindlin with the JKR model.
Material characteristic parameters include Poisson ratio, density, shear modulus, or elastic modulus. Material characteristic parameters are inherent properties of the material. By consulting relevant literature [
19,
20], the material characteristics parameters of ice fresh fish particles and 304 stainless steel studied in this paper are shown in
Table 1:
Material contact parameters include impact recovery coefficient, static friction coefficient, and rolling friction coefficient. The contact parameters between the two materials are divided into particle-particle contact parameters and particle-geometry contact parameters. The contact parameters between the two materials used in this paper are determined experimentally as shown in
Table 2:
2.5. Calibration of Surface Energy
Surface energy parameters in the JKR model are modeled and are usually calibrated by a “virtual test” (e.g., accumulation angle test) [
21,
22,
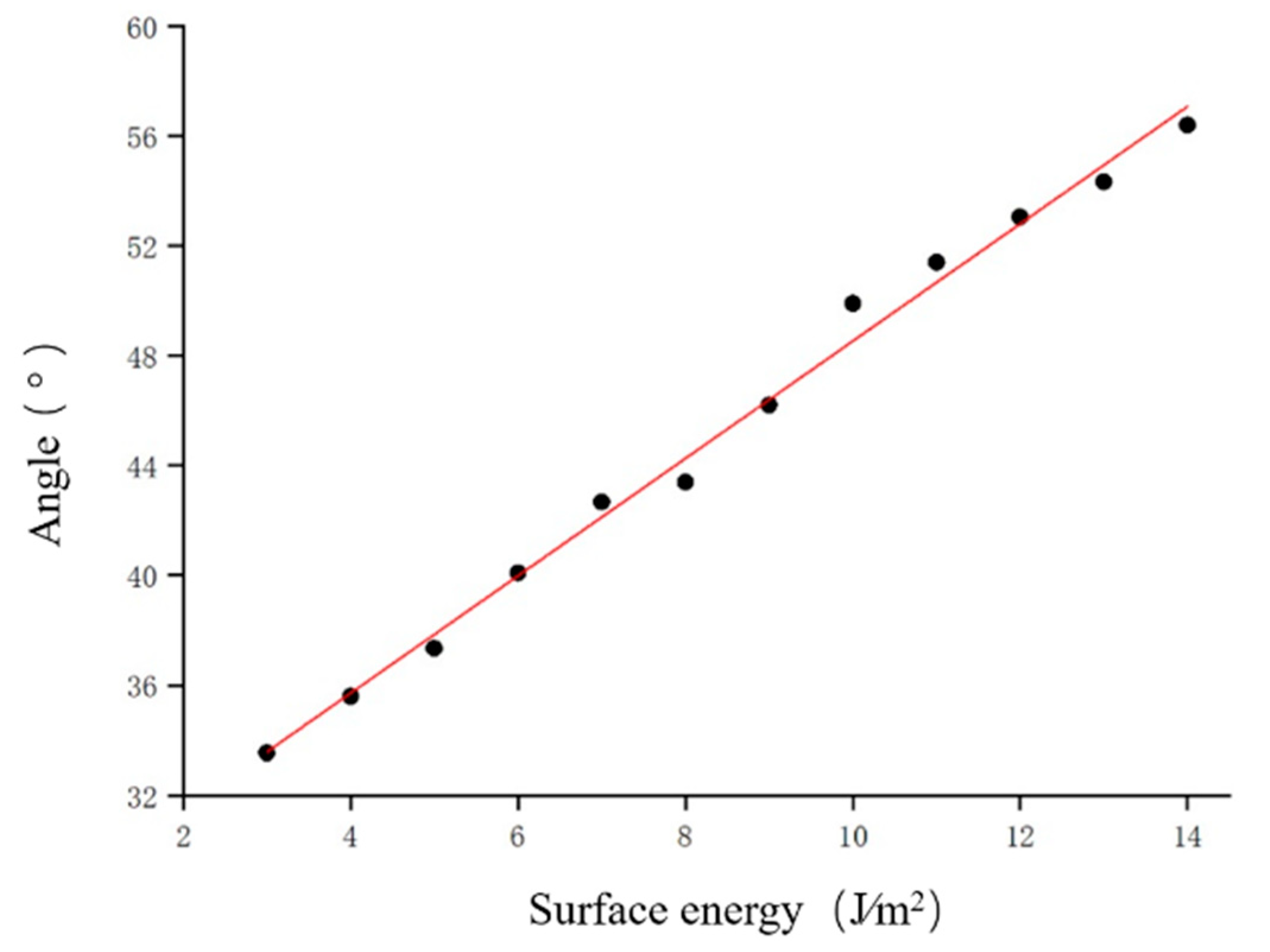
23]. When using EDEM for the virtual test of accumulation angle, a series of corresponding accumulation angle values can be obtained by modifying the surface energy values for several simulation tests. The relationship between them can be obtained by fitting the data of surface energy and accumulation angle. By substituting the measured particle accumulation angle into the fitting function, the approximate parameter value of surface energy between particles can be obtained [
24].
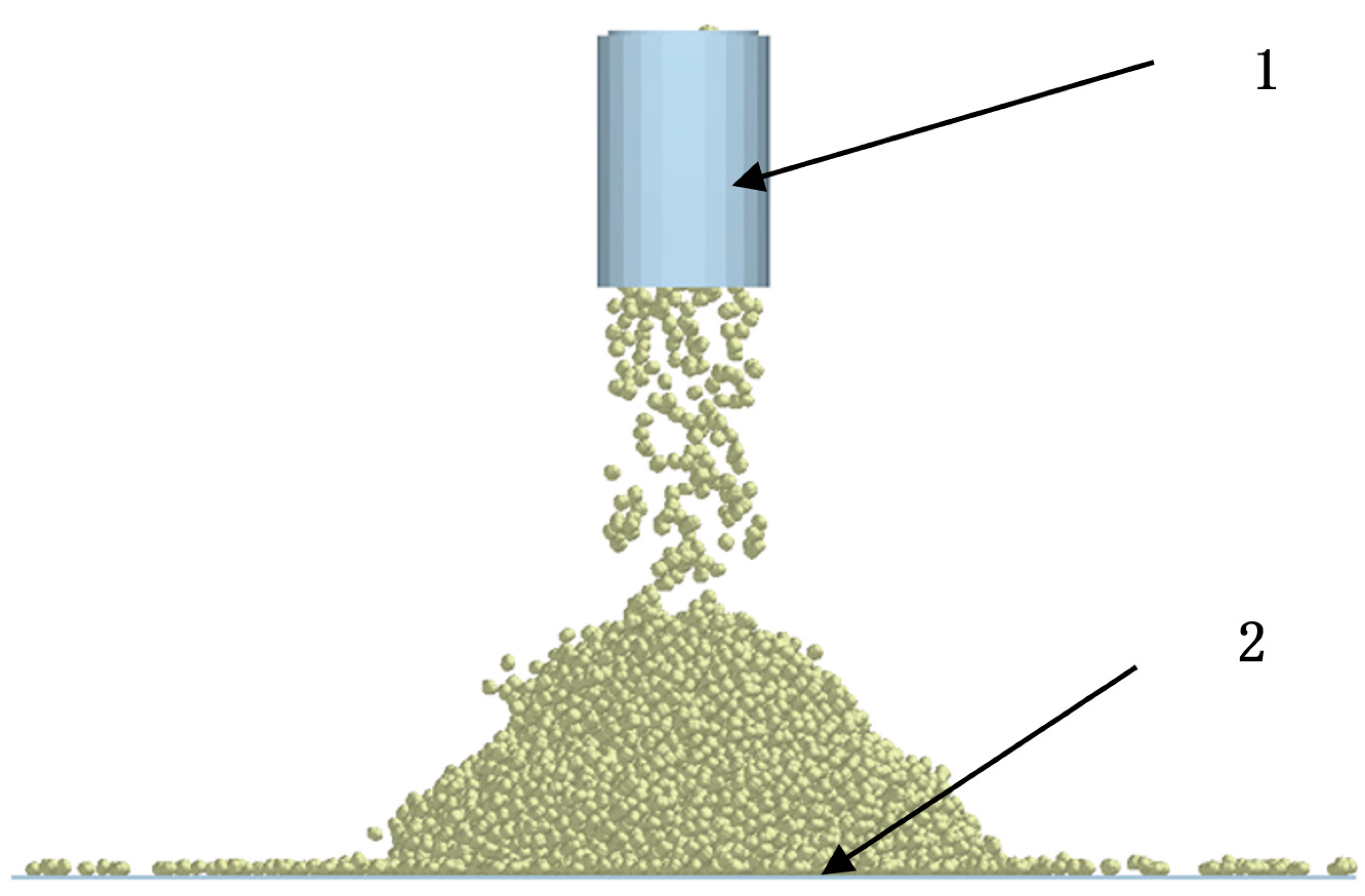
The model for measuring the accumulation angle includes the plate model and funnel model. In order to avoid the blockage of particle falling during the simulation process, the funnel model is optimized as a cylindrical discharge port and the material and contact parameters are set. The simulation results are shown in
Figure 3:
The reference range of surface energy of fish particles is 3.4–13.6 J/m2 from the Generic EDEM material model database (GEMM). In this paper, 12 surface energy parameters are designed for the virtual experiment of accumulation angle, with a surface energy of 3–14 J/m2. Two groups of free blanking simulation can be performed on each surface. After simulation, the material accumulation body is obtained. The left and right accumulation angles of the accumulation body are measured respectively, and the average of the accumulation angle is obtained. Record the specific value of the accumulation angle corresponding to each surface energy. At a constant temperature of 25 °C, fresh and frozen fish are crushed by a crusher and placed for 35 min. At this time, the accumulation angle of the fish is measured 15 times and its average value is calculated.
2.6. Prototype Test
In this paper, an efficient automatic baiting device is used as a prototype for trial production. As shown in
Figure 4, the prototype consists of an open-wheel drive device, silo, baiting device, spraying device, weighing device, and circuit control part. Through analyzing the influence of discharging inlet, silo inclination angle, and stirring time on discharging uniformity and continuity of viscous miscellaneous fish bait, different parameters were set to carry out simulation experiments on EDEM software. The simulation results are analyzed, and prototype experiments are carried out to determine the feasibility [
25].
4. Optimization Design and Simulation Analysis of Bait Conveying Device
4.1. Structural Optimization of Silos
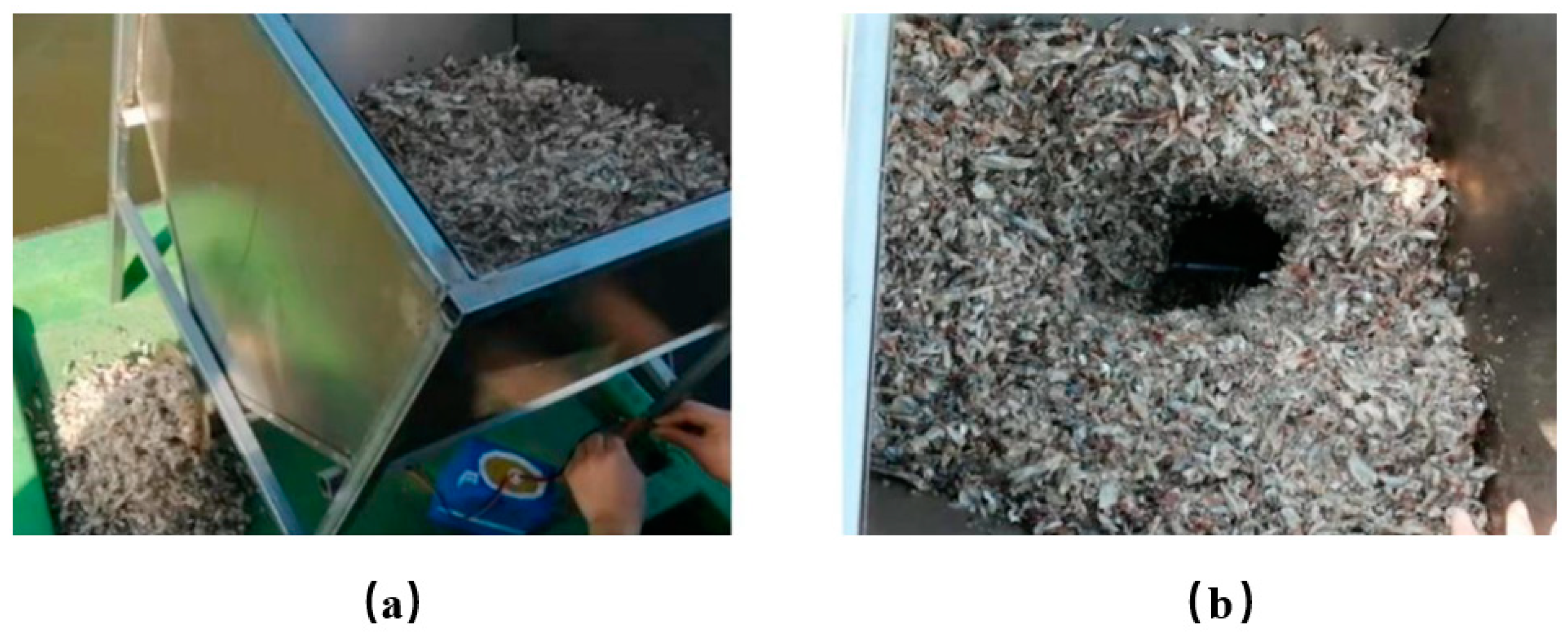
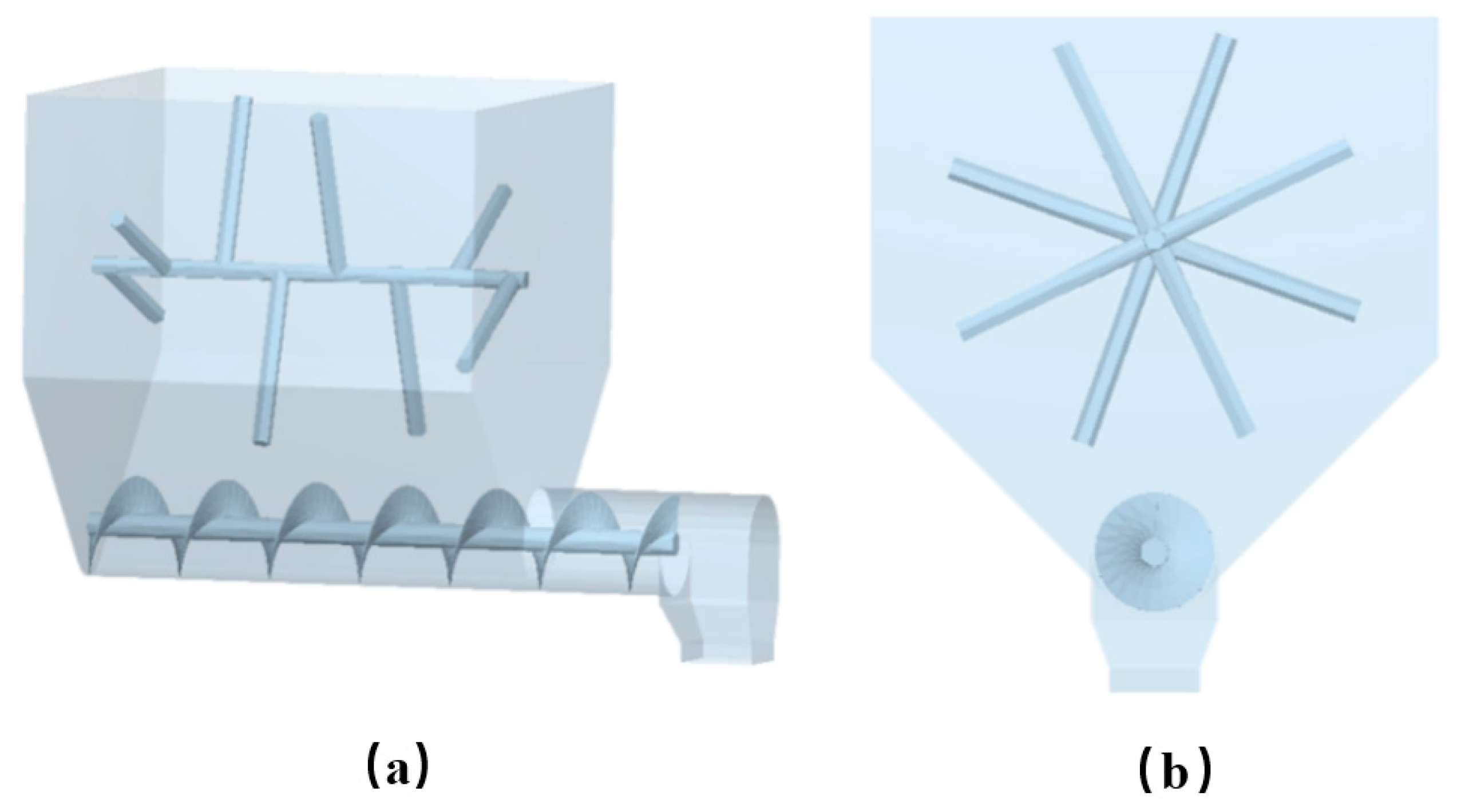
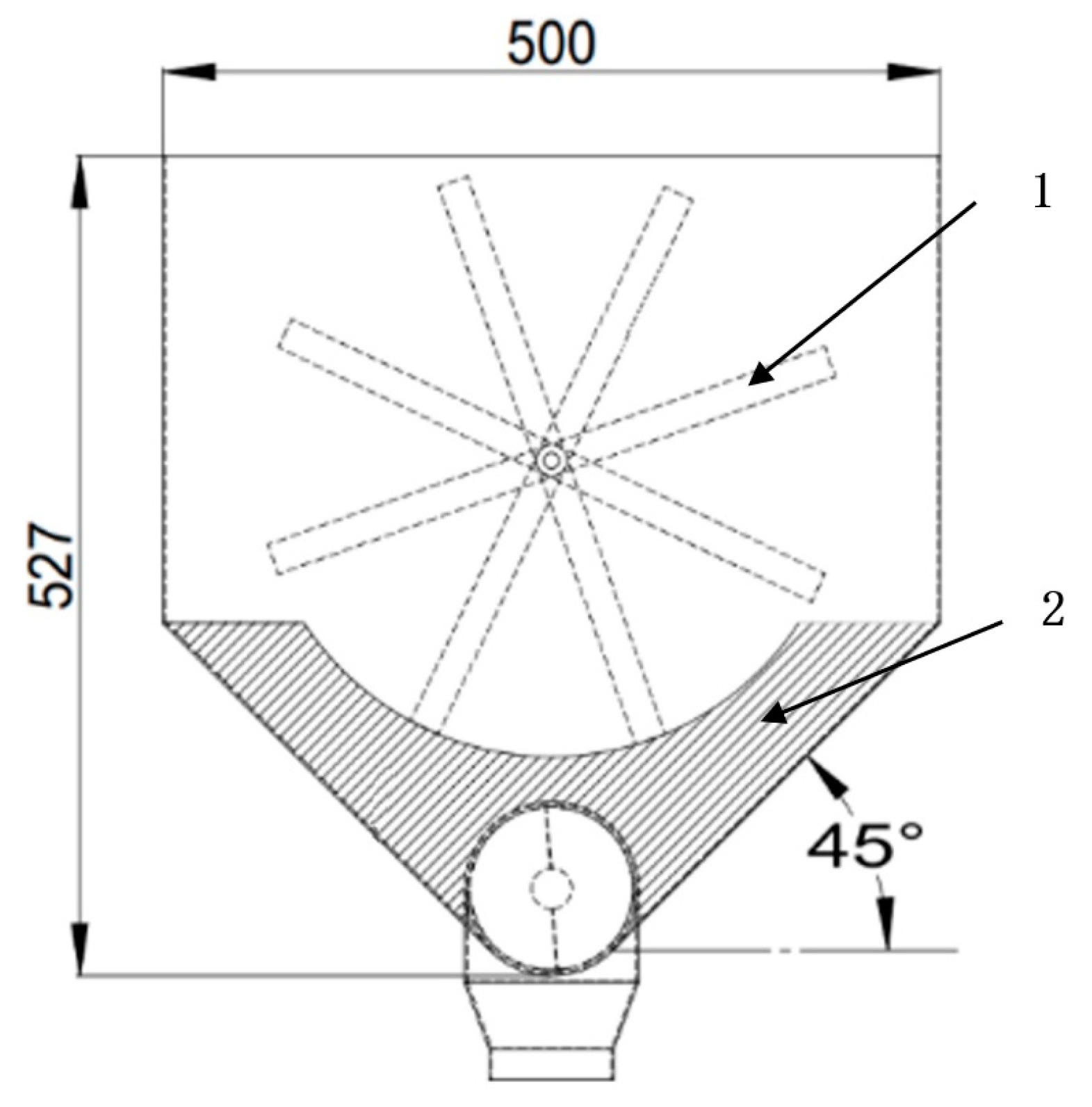
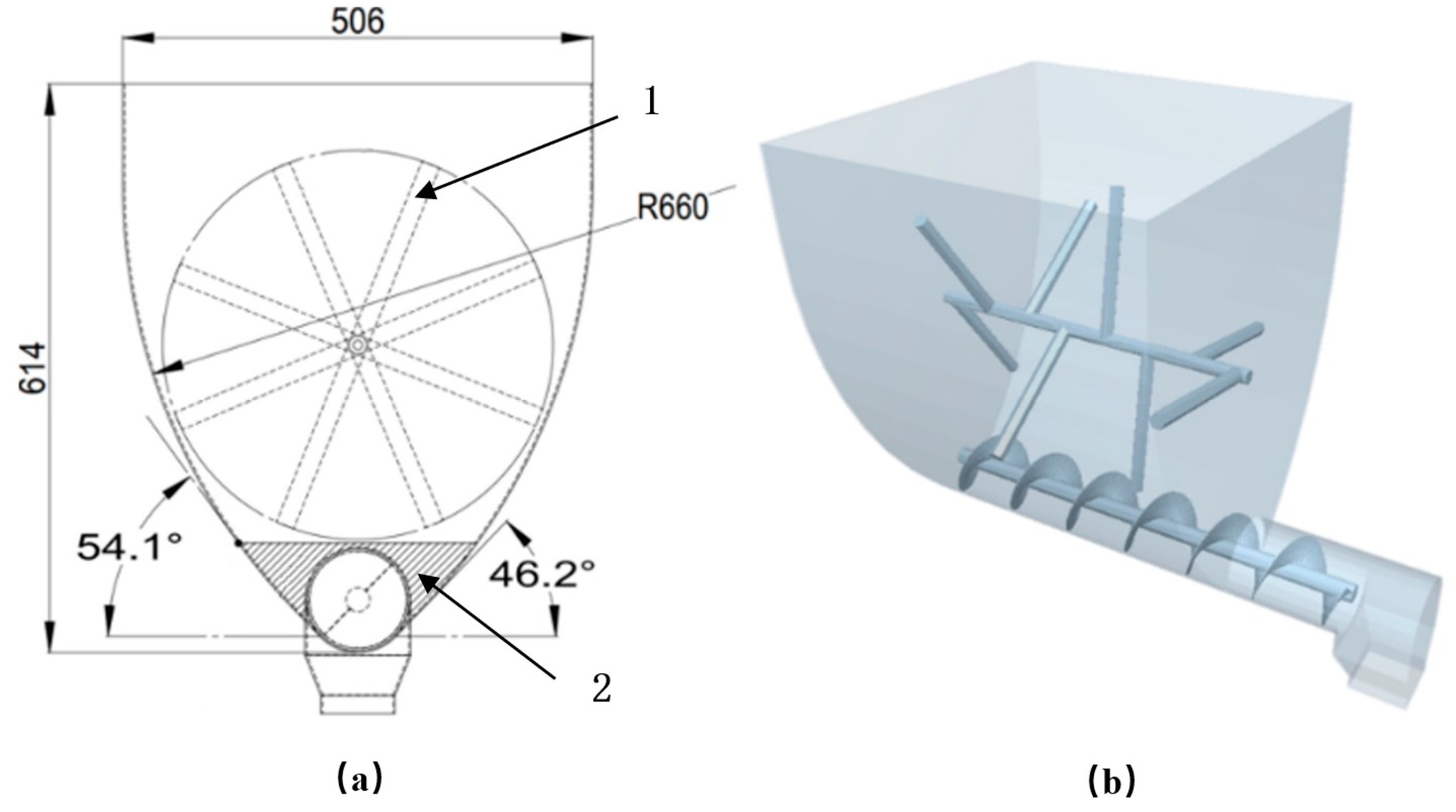
The interval between the mixing device and the side wall of the silo is large, which will cause a large dead angle area in the silo, and it is difficult to realize the complete discharging of trash fish pellets. As shown in
Figure 15, the optimized side wall of the silo is a circular curve, and the inclination angle gradually increases from 46.2° to 90°. The inclination angle of the silo side wall at point A is equal to the accumulation angle of the pellets. The optimized bin reduces the gap between the mixing device and the side wall of the bin and the size of the dead zone.
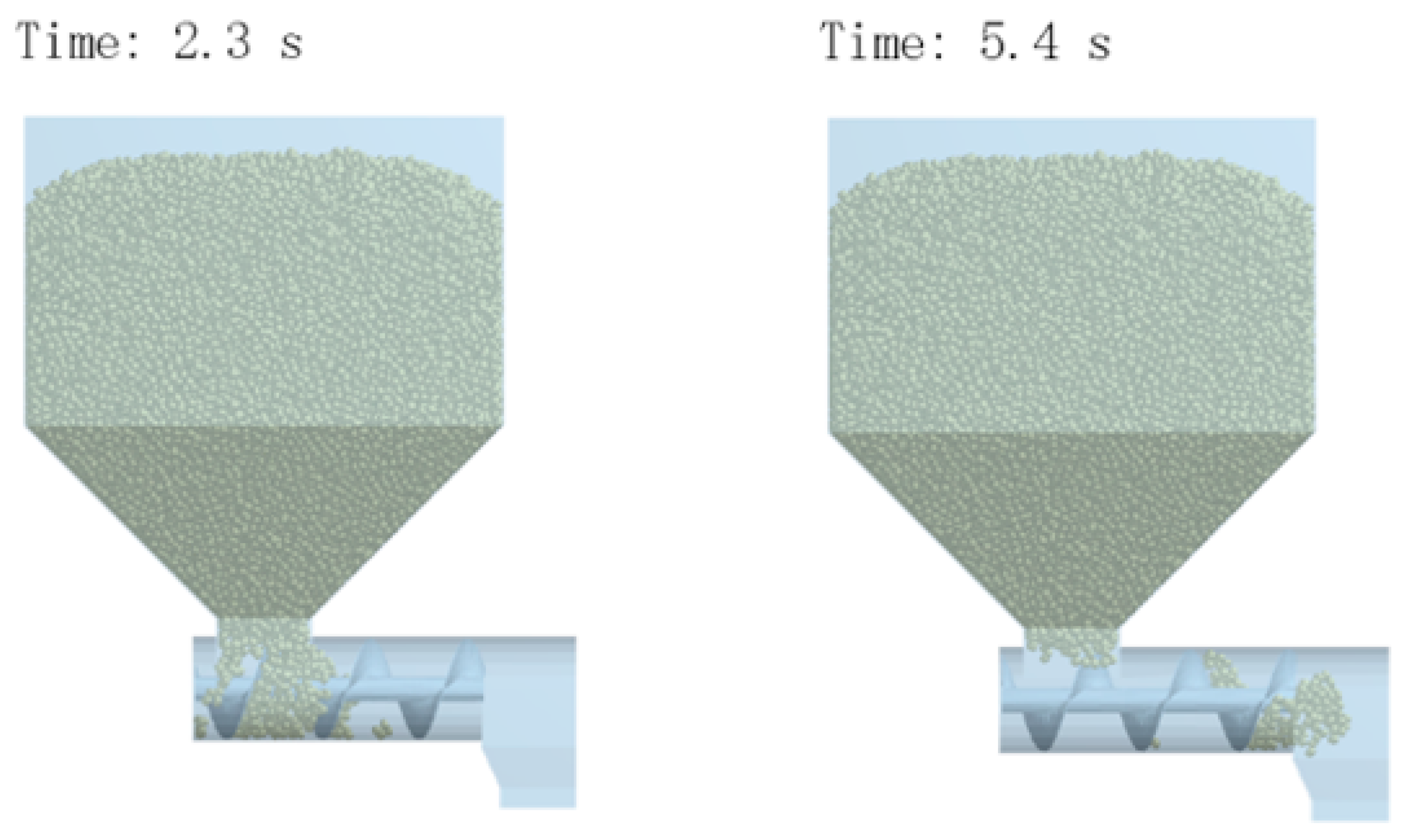
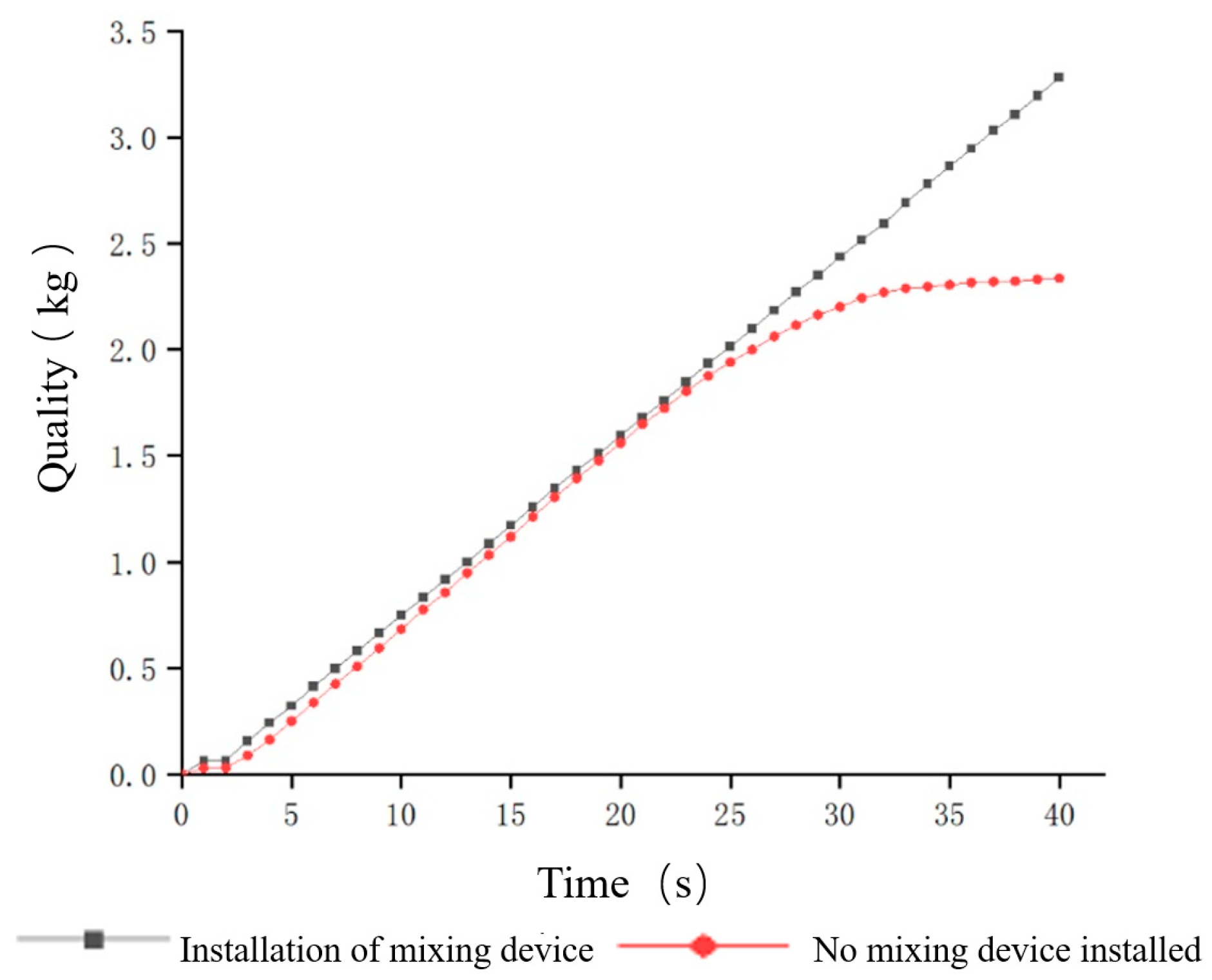
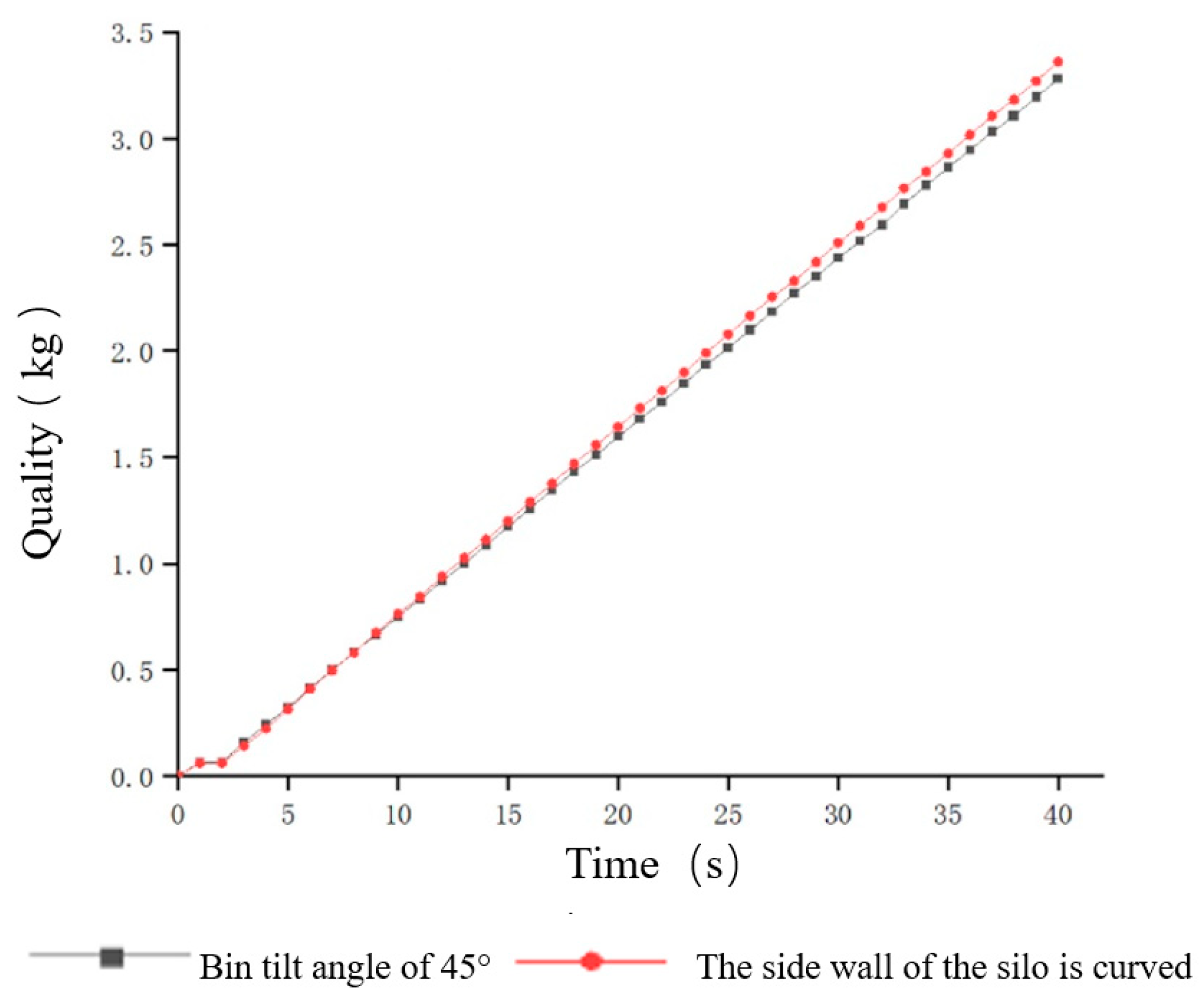
In order to verify the optimization effect of the silo structure, the optimized discharging device was simulated with the stirring device rotating at 20 r/min from the 2nds, the simulation time was set to 40 s, and the other simulation parameters were kept unchanged. The simulation results are shown in
Figure 16. Compared with the bin inclination angle of 45° and the installation of the mixing device, the optimized discharging device can achieve uniform discharging and better discharging uniformity in the early stage of discharging.
4.2. Optimization of the Rotation Parameters of the Mixing Device
The stirring device can make the bait in the stirring area completely discharged and improve the uniformity of discharging, but the continuous rotation of the stirring device will increase the breaking rate of trash fish particles. Therefore, the rotation parameters of the stirring device need to be optimized, and the stirring device is changed from continuous rotation to interval rotation in order to ensure the uniformity of discharging and reduce the rate of breaking of trash fish bait. The faster the rotation speed of the stirring device and the larger the rotation angle of the stirring device will increase the breakage rate of the miscellaneous fish pellet bait, in order to reduce the breakage rate of the miscellaneous fish pellet bait, the rotation speed of the stirring device is set to 20 r/min and the rotation angle of the stirring device is 180°, then the time required for the stirring device to rotate once is 1.5 s.
In order to study the effect of interval duration on the uniformity of discharging, multiple rotation parameters are set according to the simulation requirements, and the interval duration between adjacent rotation parameters is a constant value. Take the interval duration of 3 s as an example, the stirring device starts to rotate at 2 s and stops rotating after 3.5 s, and the interval duration of 3 s, then the stirring device starts to rotate for the second time at 6.5 s, and so on for the time setting of the rotation parameter. The longer the interval time, than is, the longer the mixing device stops rotating, and the lower the fragmentation rate of trash fish particles.
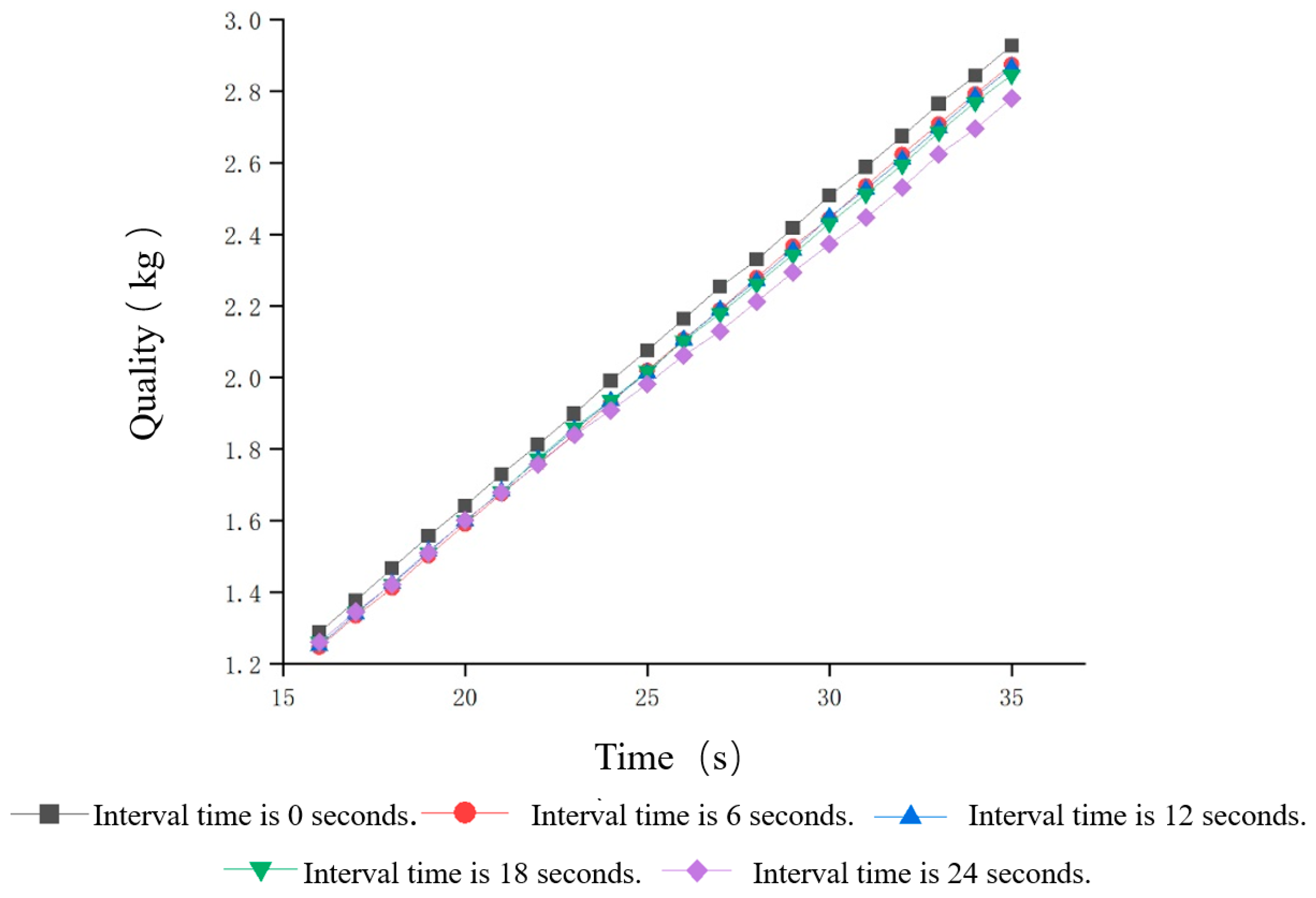
The interval lengths of the mixing device are 0 s, 6 s, 12 s, 18 s, and 24 s, respectively, and the simulation tests are conducted using EDEM software for different interval length parameters, and the specific grouping of the relevant simulation parameters is shown in
Table 4.
The simulation results are shown in
Figure 17. When the interval time is 0 s, the mass of bait delivered to the outlet at the same time is the largest. The mass of the bait delivered to the outlet at the same time decreases as the interval duration increases. The slope of the mass curve was more stable for the intervals of 0 s, 6 s, and 12 s. The uniformity is worst for the interval length of 24 s, and the slope of its mass curve fluctuates more when the simulation proceeds to 23–28 s. From the simulation results, it can be seen that when the selected interval time parameter is less than 16.7 s, the uniformity of miscellaneous fish bait discharging is better. On the premise of ensuring the uniformity of discharging, in order to reduce the breaking rate of miscellaneous fish bait, the parameter with a longer interval time should be selected, and the final interval time of the mixing device is 12 s.
4.3. Simulation Verification of Optimization Results and Experiments
After the optimization of the discharging device is completed, the simulation of the discharging process of miscellaneous fish pellet bait in the late stage of discharging is needed to verify whether the optimized bin structure and rotation parameters can realize the complete discharging of miscellaneous fish pellet bait.
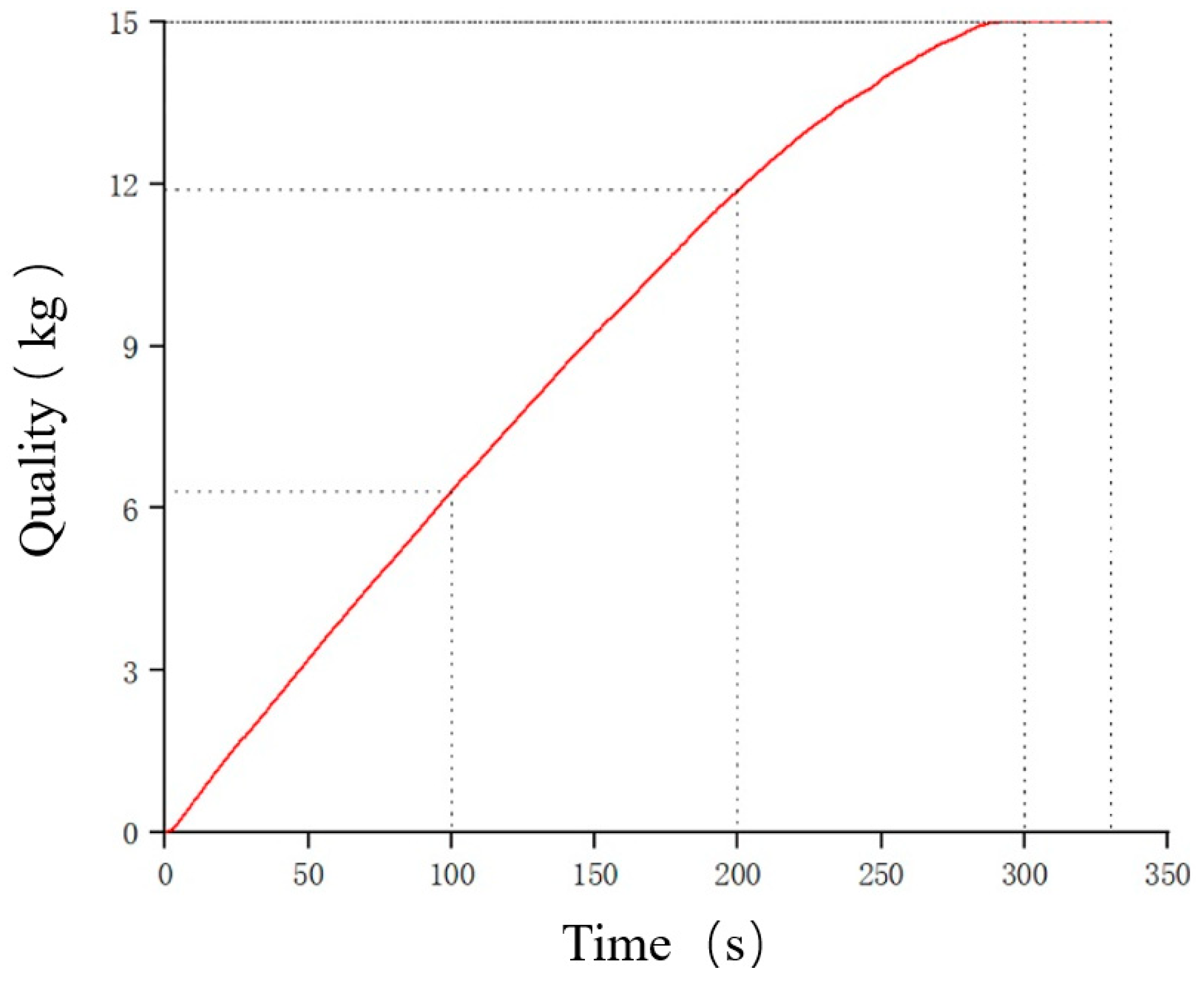
In order to reduce the simulation time, the bait mass was set to 15 kg, the mixing interval of the mixing device was set to 12 s, several rotation parameters were set according to the simulation requirements, and the rest of the parameters remained unchanged. The fitted spline curve of the mass of the miscellaneous fish bait output from the discharge port with time is shown in
Figure 18 The curve of the mass of the bait downstream with time can be divided into two stages: The first stage is 0–200 s, in which the slope of the curve of mass vs. time of miscellaneous fish bait is more stable, than is, the uniformity of feeding is better in this stage; the second stage is 200–290 s; at this stage, the slope of the curve between the quality and time of the miscellaneous fish diet changed greatly, indicating that the feeding uniformity was poor. At 290 s, 15 kg of bait in the bin was completely discharged from the outlet, indicating that the miscellaneous fish bait was completely discharged.
To verify whether the discharging device can achieve uniform, continuous, and complete discharging of miscellaneous fish bait, three portions of 15 kg mass of miscellaneous fish pellet bait were taken for experimental verification. During the experiment, we need to observe the bait discharging situation and count the time spent on discharging three 15 kg baits, the results of the experiment and the statistical data results are shown in
Table 5.
The main reason is that the experiments were carried out sequentially by number, and there was a certain time interval between the end of the experiment and the next experiment, and as the time of placing the miscellaneous fish bait increased, its viscosity increased and the surface energy also increased, leading to an increase in the length of time spent on feeding. The experimental results are in high agreement with the simulation results, and the overall undercutting effect is good.
5. Conclusions
According to the simulation and experimental results, the main factors affecting the uniformity and smoothness of the feeding of miscellaneous fish particles are the diameter of the feeding mouth, the inclination of the feeding bin, and the external force.
The problems of the blanking device were analyzed according to the influencing factors, and the structure and parameters of the blanking device were optimized. Optimize the structure of the feeding mouth of the silo was optimized and the contact length between the spiral conveyor and the bait was increased. After the optimization, the side wall of the silo was an arc curve, and the inclination angle gradually increased from 46.2° to 90°. The mixing device was designed to continuously stir the mixed fish pellet feed, with a rotating speed of 20 r/min, a rotating angle of 180° and a rotating time interval of 12 s;
The simulation and experimental verification of the optimized agitating feeding device showed that the optimization effect of the agitating feeding device was good, and can realize the uniform, continuous and complete feeding of miscellaneous fish particles, and significantly improve the feeding efficiency.
The simulation results were basically consistent withs the experimental results of the prototype, which confirms the feasibility of using the EDEM software for numerical simulation analysis. At the same time, the results of this study can also be used in the feeding process of other aquaculture products and the feeding process of other sticky materials.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}