
Fuzzy Adaptive Energy Management Strategy for a Hybrid Agricultural Tractor Equipped with HMCVT

Abstract
:1. Introduction
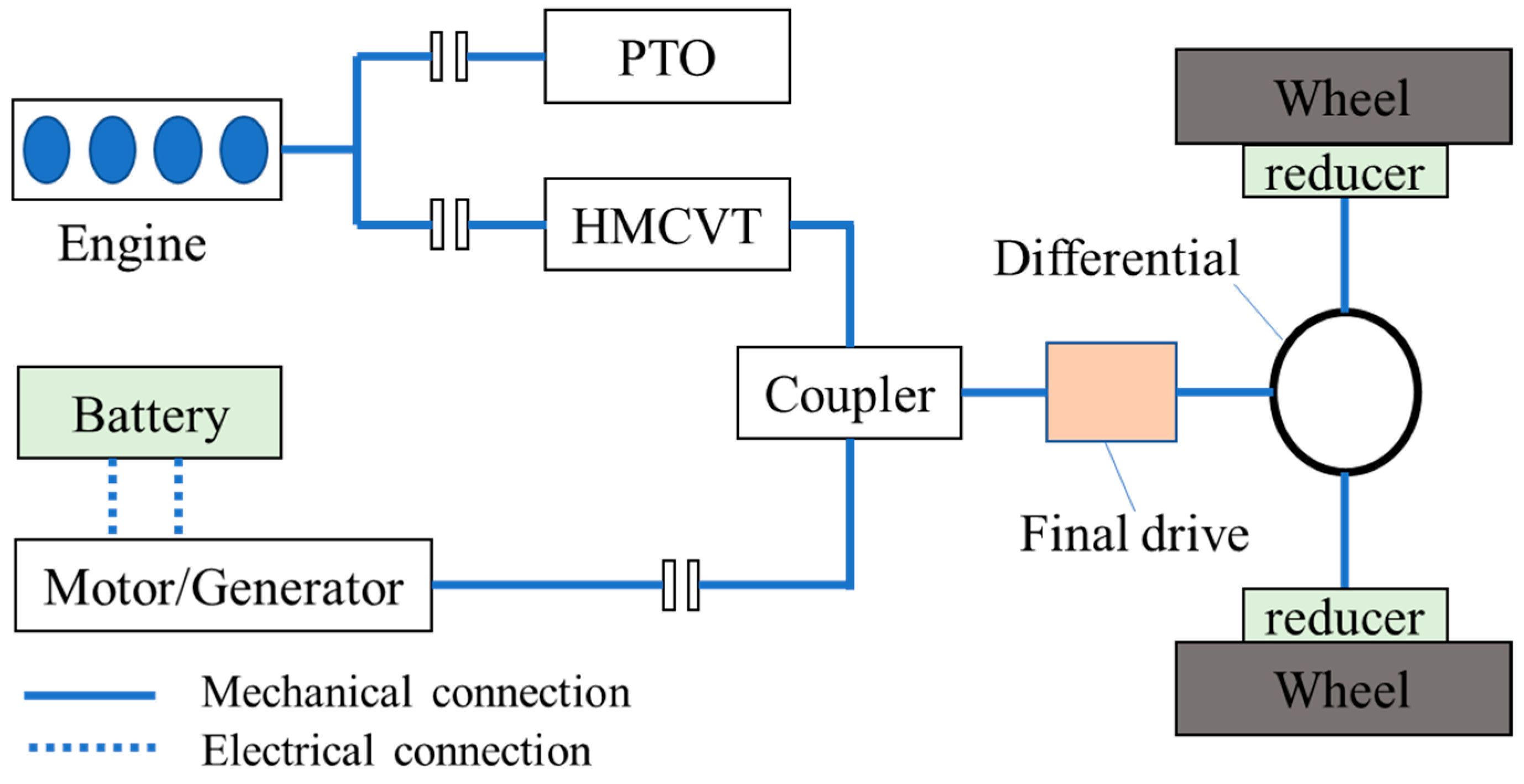
2. System Structure of Hybrid Tractor
2.1. System Architecture
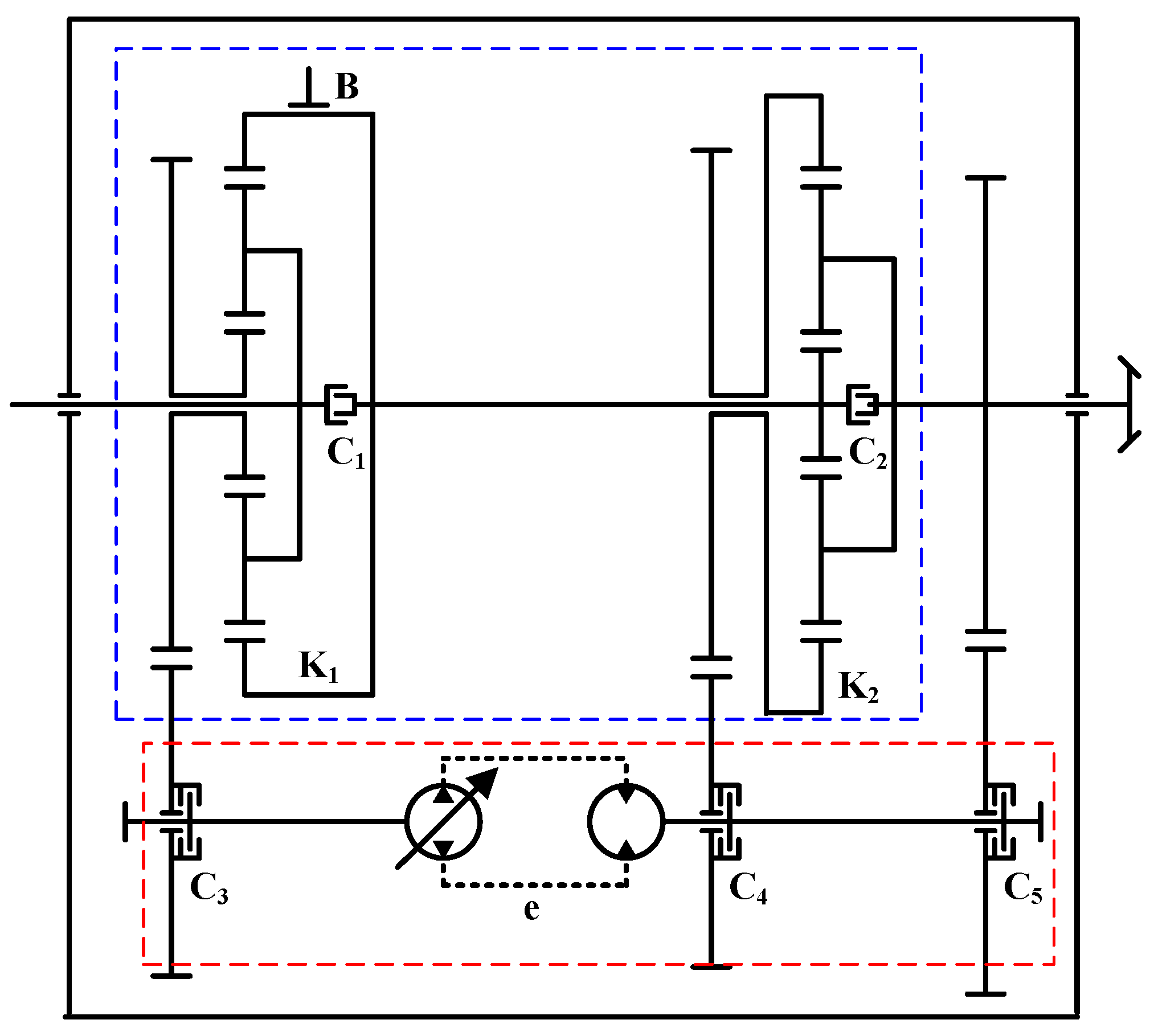
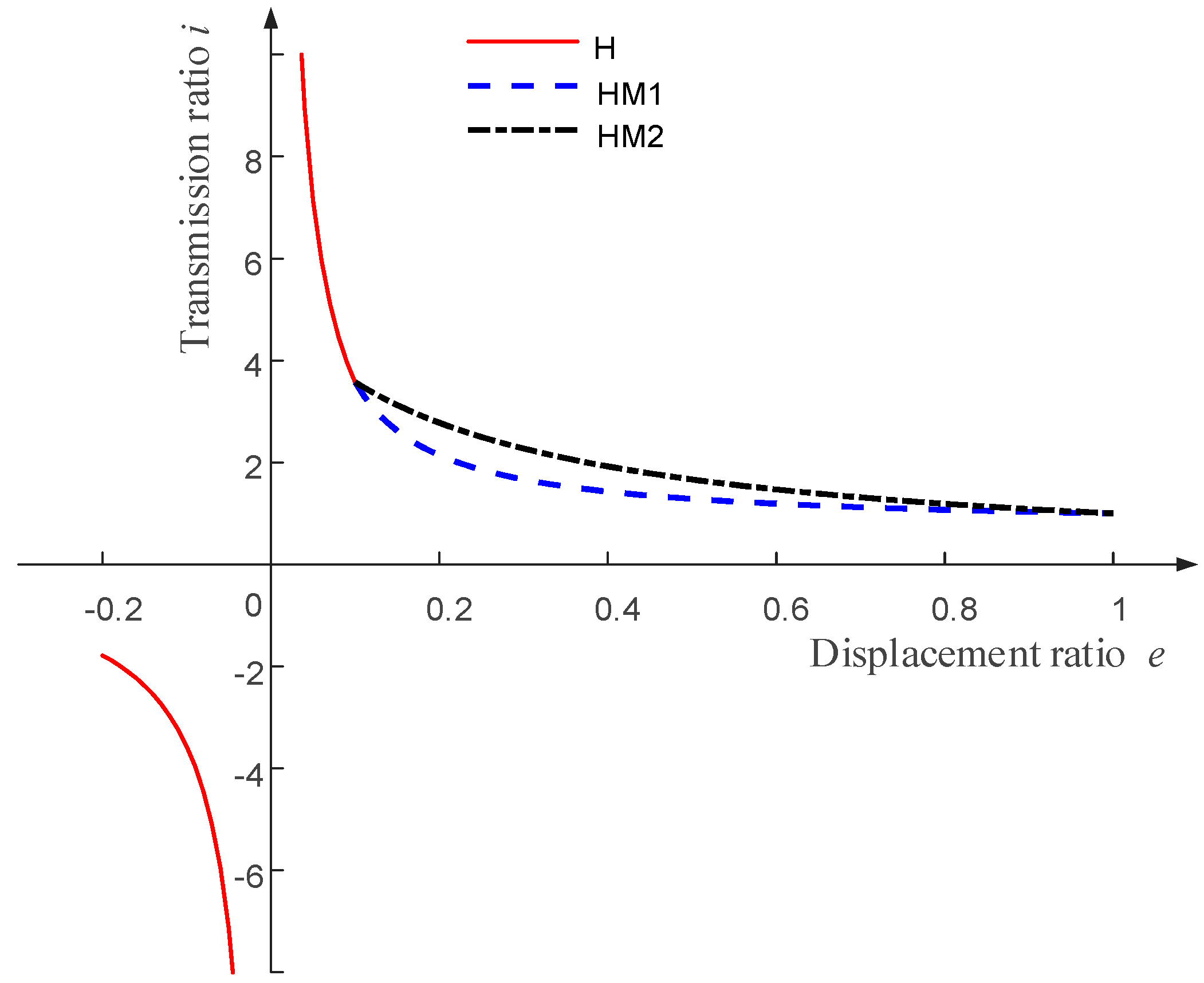
2.2. Transmission Mode of HMCVT
3. System Modeling
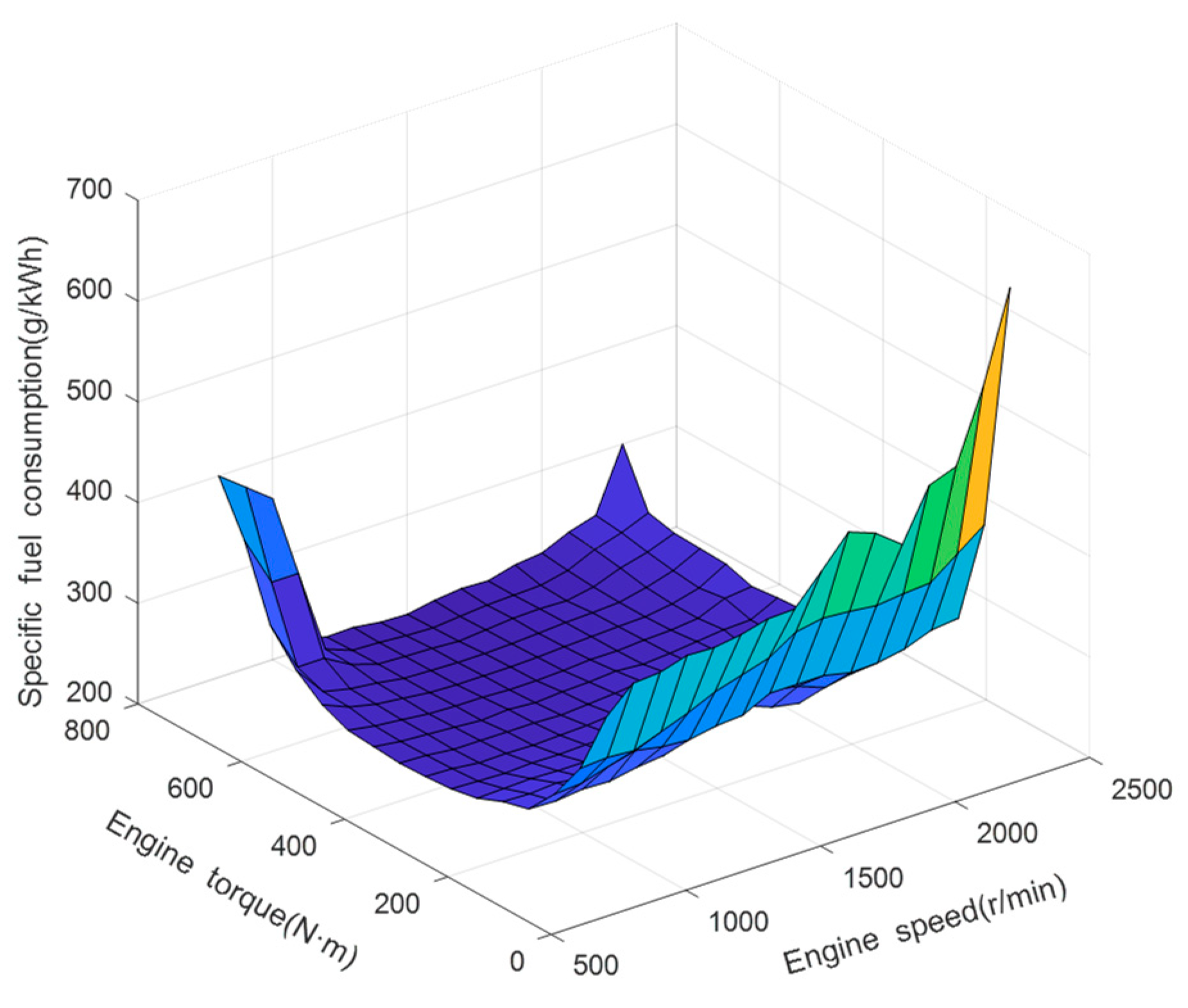
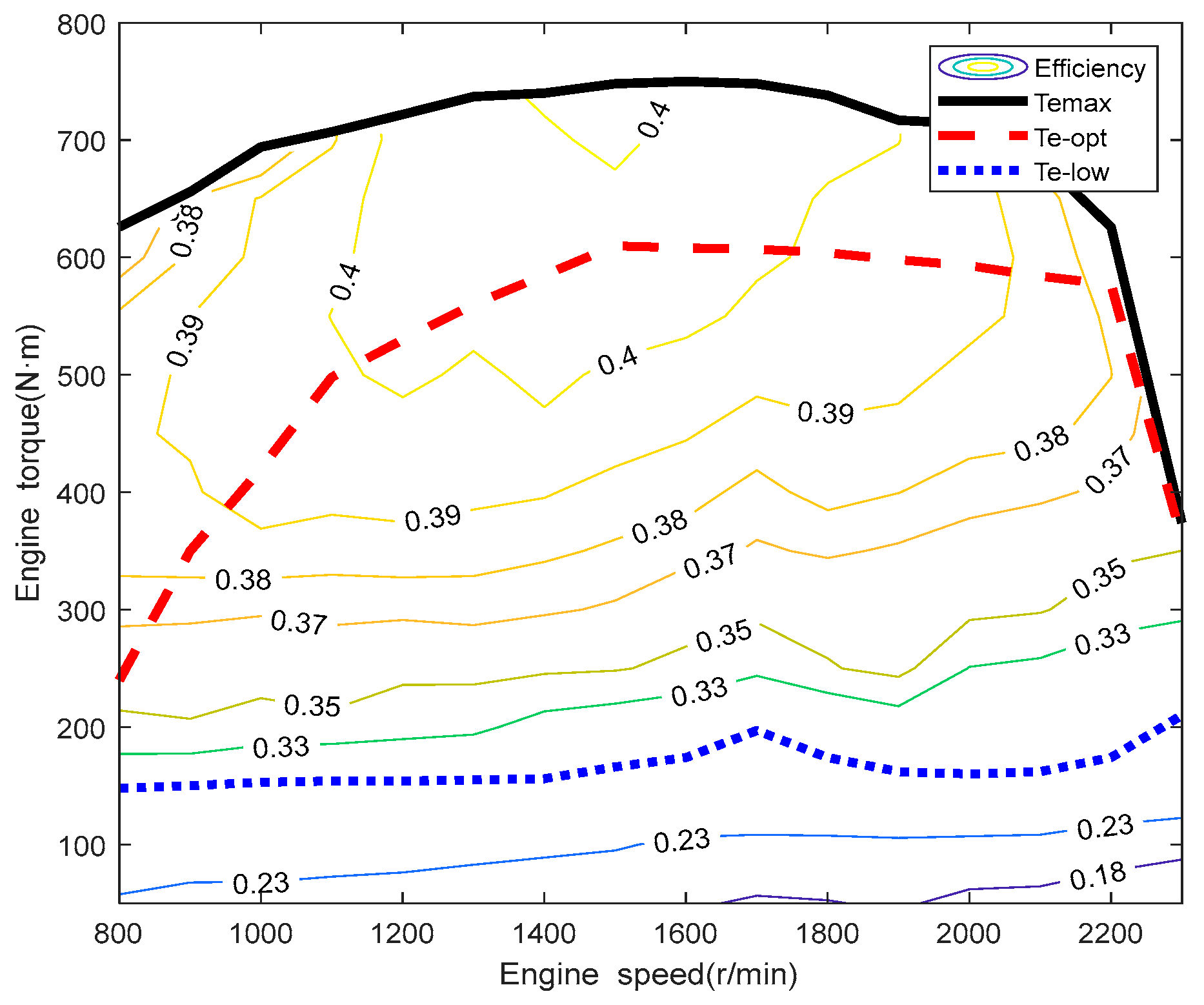
3.1. Engine Model
3.2. Motor Model
3.3. Battery Model
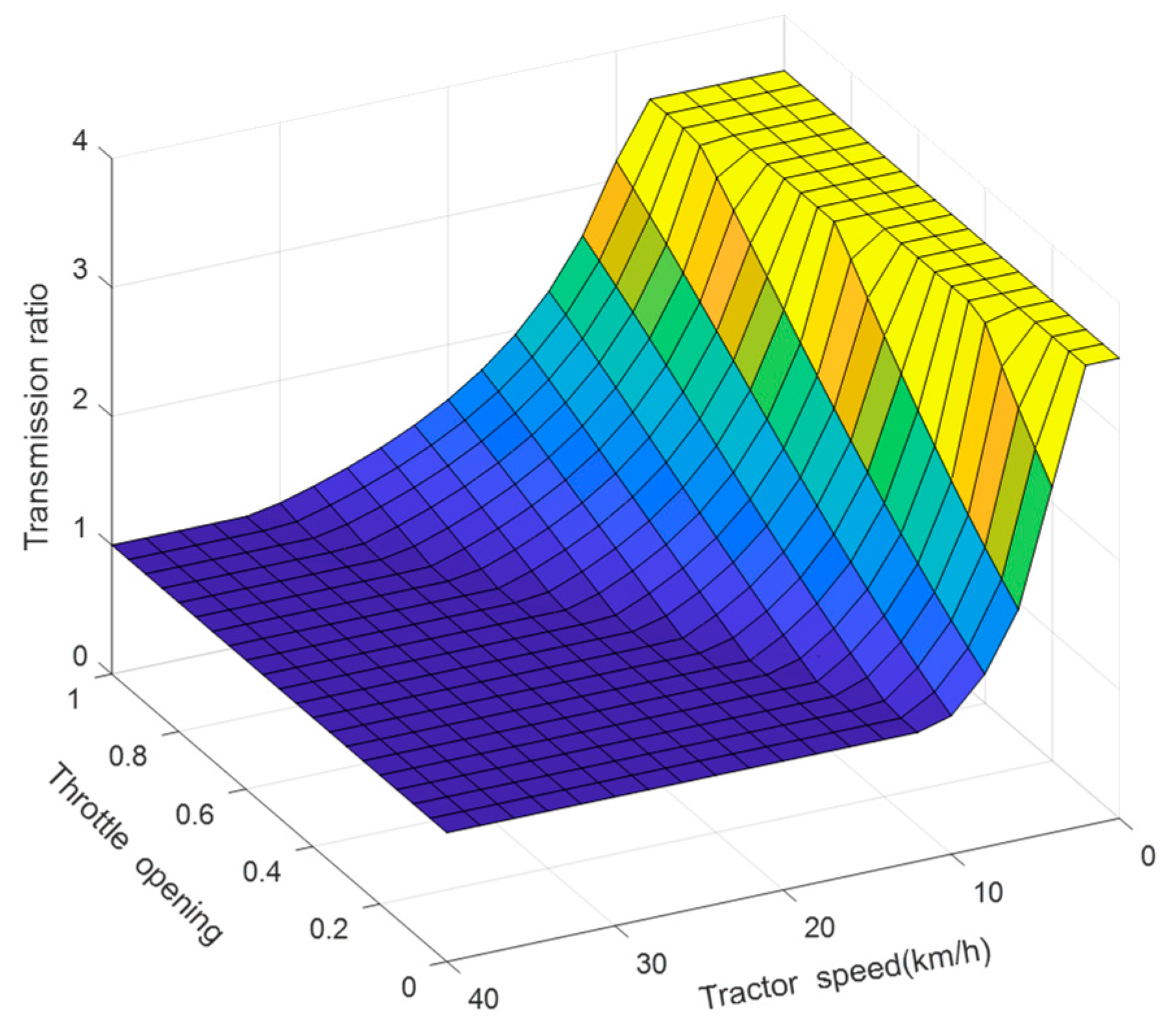
3.4. Transmission Model
3.5. Longitudinal Dynamics Model of the Tractor
4. Real-Time Optimized Energy Management Strategy
4.1. Control Strategy Framework
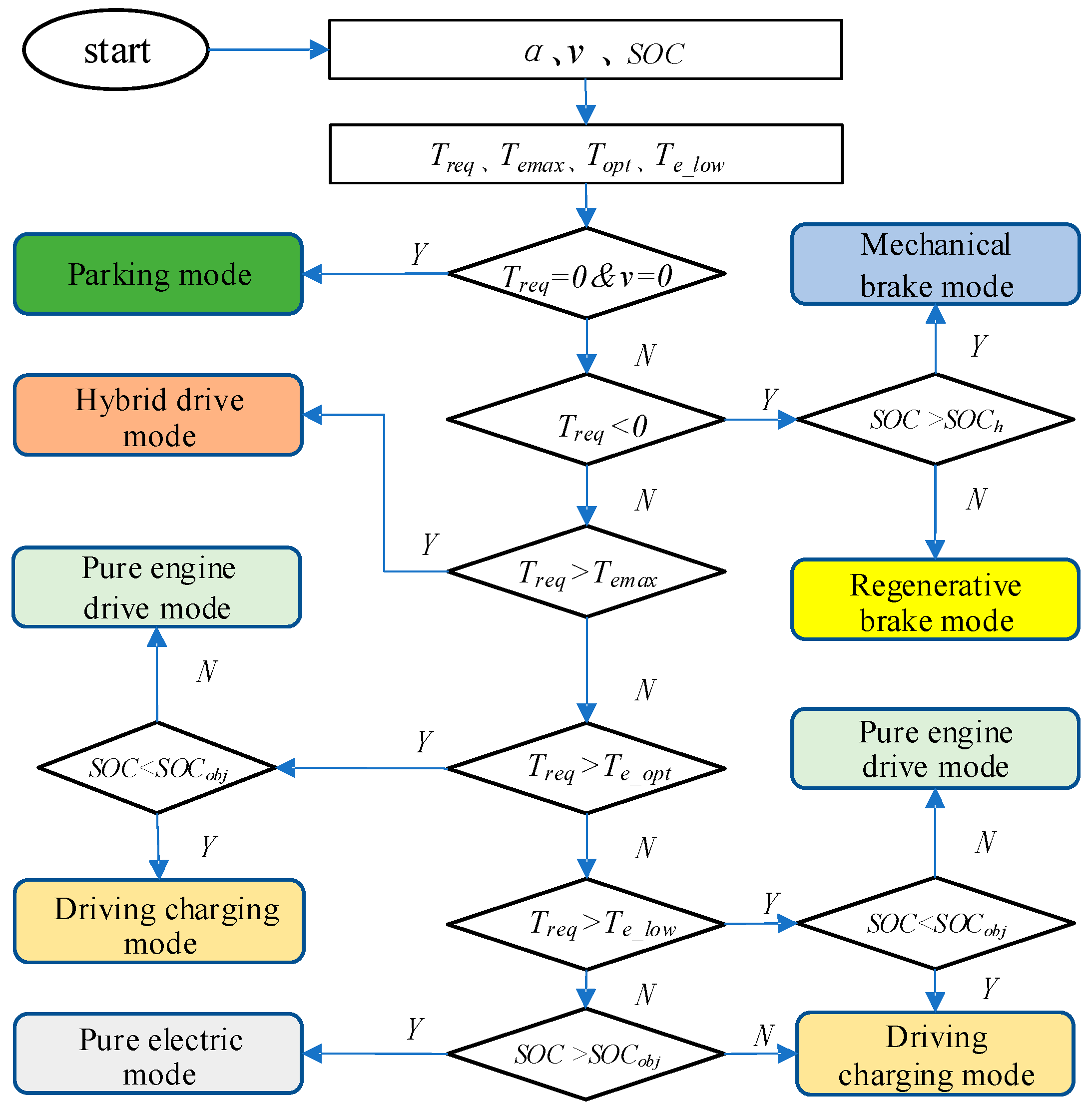
4.2. Mode Division Based on Logical Thresholds
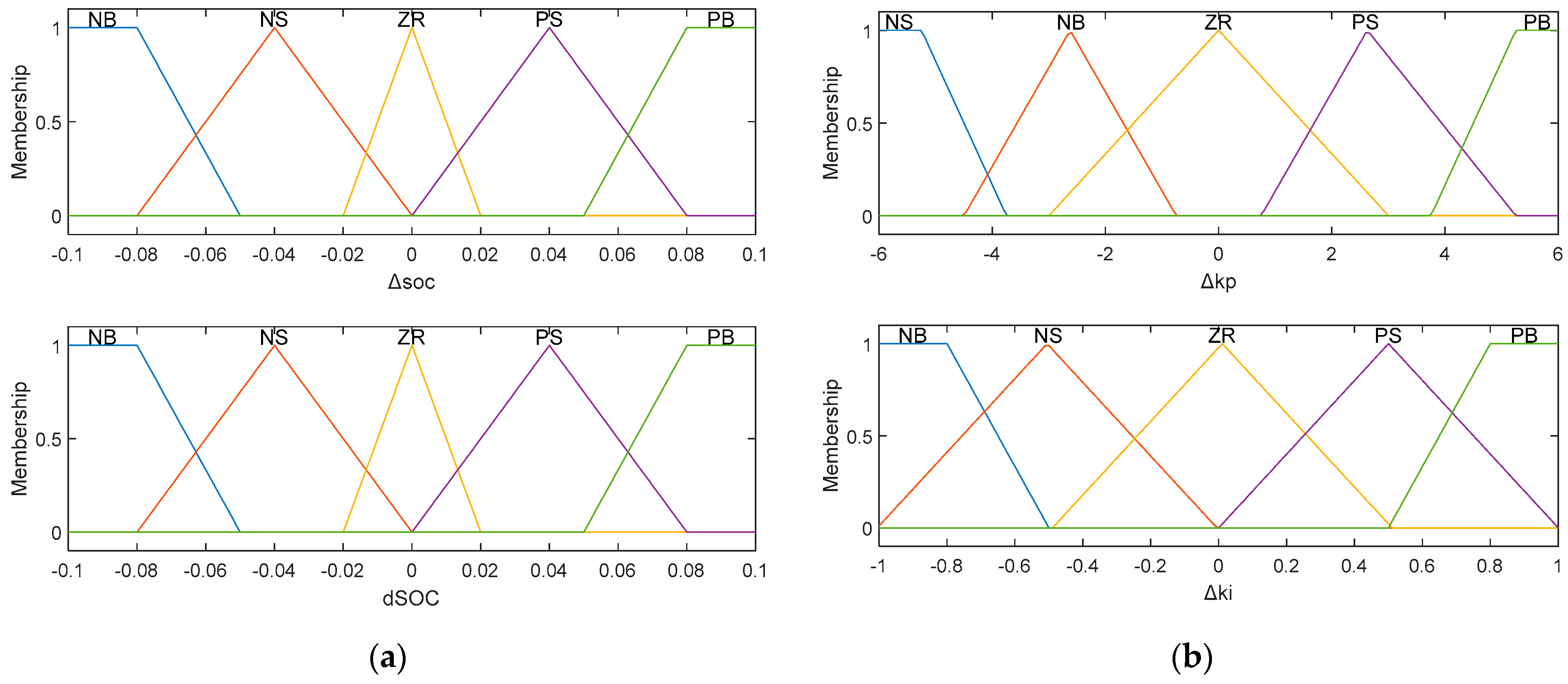
4.3. Fuzzy Adaptive Equivalent Fuel Consumption Minimization Strategy
5. Simulation Analysis
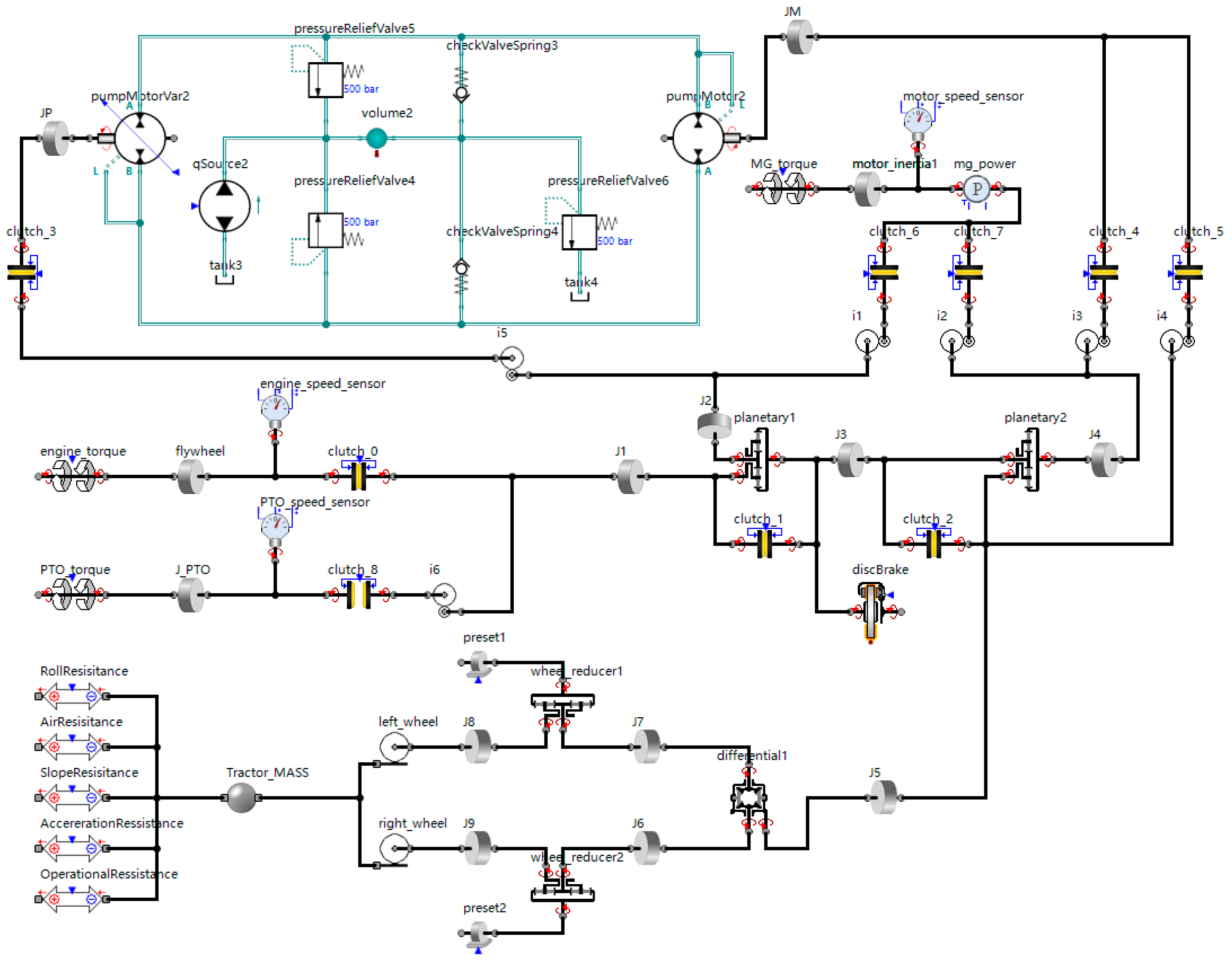
5.1. Simulation Model Construction
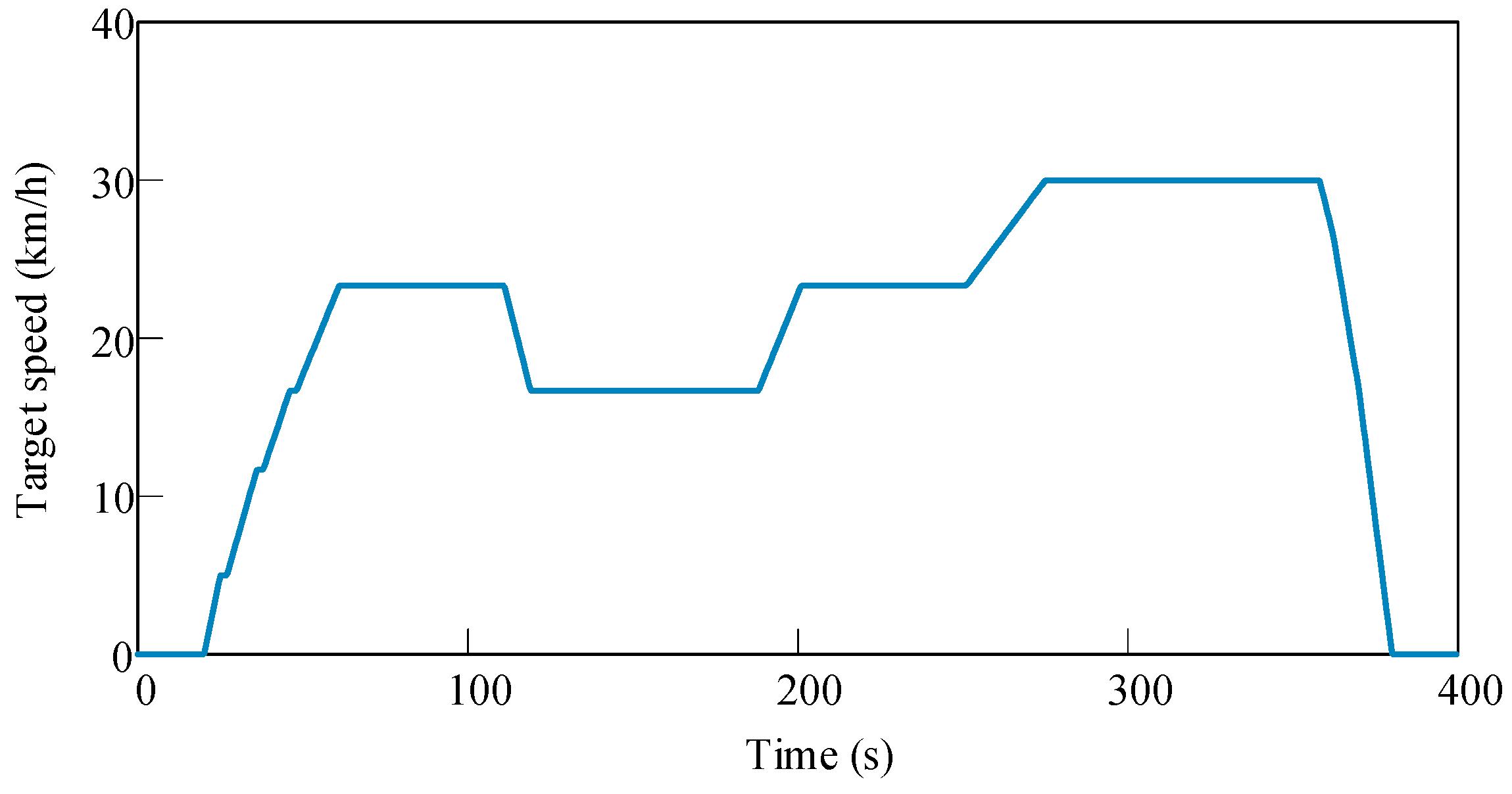
5.2. Cycle Construction
5.3. Analysis of the Plowing Cycle
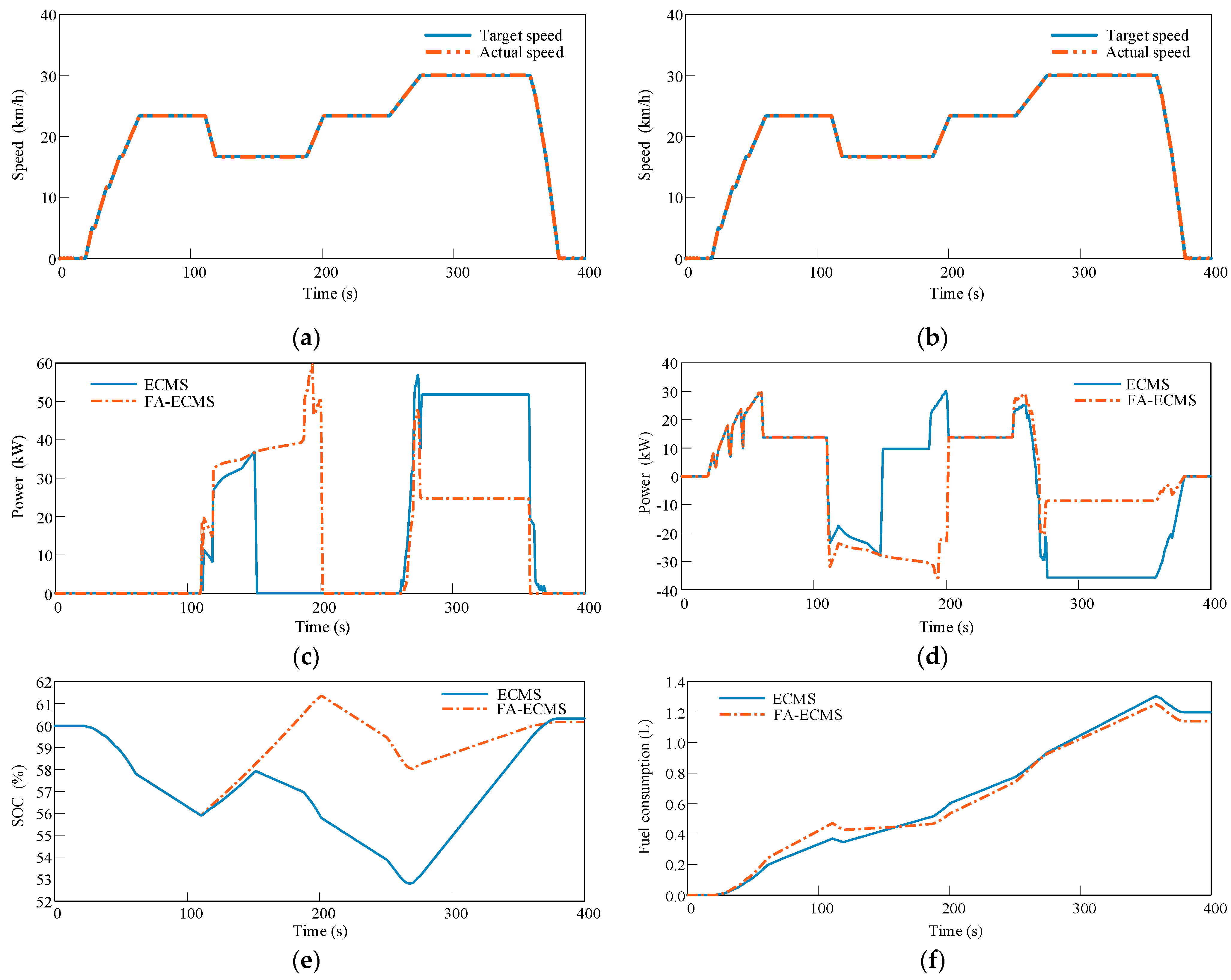
5.4. Analysis of the Road Transport Cycle
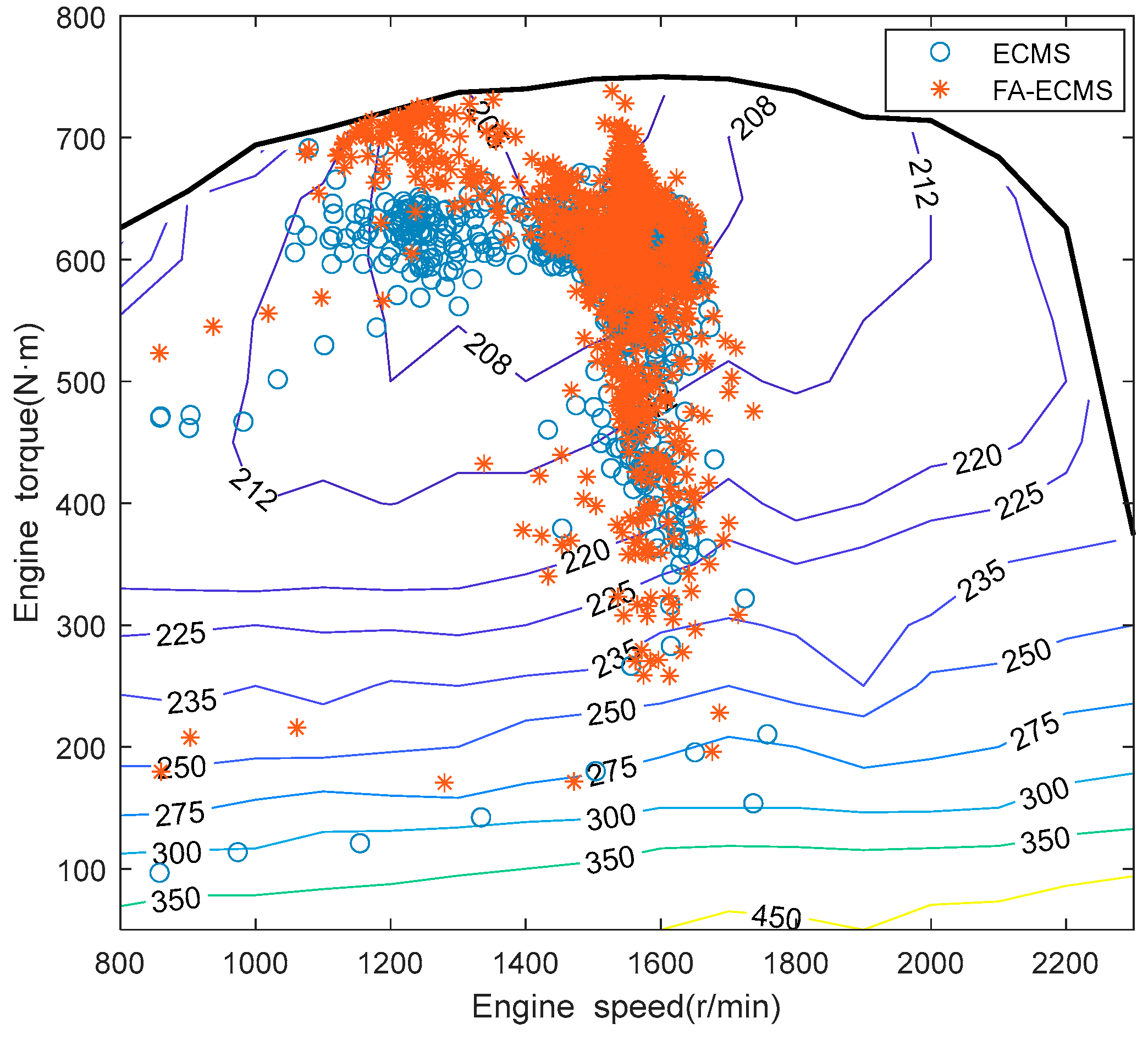
5.5. Comparative Analysis of Simulation Results
6. Conclusions
7. Patents
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Data Query System of Ministry of Agriculture and Rural Affairs of the People’s Republic of China. Available online: http://zdscxx.moa.gov.cn:8080/nyb/pc/search.jsp (accessed on 15 July 2022).
- Guo, S. The present situation and consideration of agricultural mechanization development in China. South. Agric. Mach. 2022, 53, 79–82. [Google Scholar]
- Liu, M.; Lei, S.; Zhao, J. Development process and research status of electric tractor. Trans. Chin. Soc. Agric. Mach. 2022, 12, 1547. [Google Scholar]
- Xie, B.; Wu, Z.; Mao, E. Development and prospect of key technologies on agricultural tractor. Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–17. [Google Scholar]
- Malik, A.; Kohli, S. Electric tractors: Survey of challenges and opportunities in India. Mater. Today Proc. 2020, 28, 2318–2324. [Google Scholar] [CrossRef]
- Dalboni, M.; Santarelli, P.; Patroncini, P.; Soldati, A.; Concari, C.; Lusignani, D. Electrification of a Compact Agricultural Tractor: A Successful Case Study. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; IEEE: Piscataway, NJ, USA; pp. 1–6. [Google Scholar]
- Mocera, F.; Martini, V. Numerical Performance Investigation of a Hybrid eCVT Specialized Agricultural Tractor. Appl. Sci. 2022, 12, 2438. [Google Scholar] [CrossRef]
- Rossi, C.; Pontara, D.; Falcomer, C.; Bertoldi, M.; Mandrioli, R. A Hybrid–Electric Driveline for Agricultural Tractors Based on an e-CVT Power-Split Transmission. Energies 2021, 14, 6912. [Google Scholar] [CrossRef]
- Mocera, F.; Somà, A. Analysis of a Parallel Hybrid Electric Tractor for Agricultural Applications. Energies 2020, 13, 3055. [Google Scholar] [CrossRef]
- Wu, Z.; Xie, B.; Chi, R.; Ren, Z.; Du, Y.; Li, Z. Driving torque management model for electric tractor in field cruise condition. Trans. CSAE 2019, 35, 88–98. [Google Scholar]
- Jia, C.; Qiao, W.; Qu, L. Numerical Methods for Optimal Control of Hybrid Electric Agricultural Tractors. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019; IEEE: Piscataway, NJ, USA; pp. 1–6. [Google Scholar]
- Rodriguez, R.; Trovão, J.P.F.; Solano, J. Fuzzy logic-model predictive control energy management strategy for a dual-mode locomotive. Energy Convers. Manag. 2022, 253, 115111. [Google Scholar] [CrossRef]
- Tang, X.; Yang, K.; Wang, H.; Yu, W.; Yang, X.; Liu, T.; Li, J. Driving Environment Uncertainty-Aware Motion Planning for Autonomous Vehicles. Chin. J. Mech. Eng. 2022, 35, 120. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, Y.; Zhang, H.; Yang, F.; Ren, J.; Wang, X.; Jin, P.; Huang, D. Research on the energy management strategy of extended range electric vehicles based on a hybrid energy storage system. Energy Rep. 2022, 8, 6602–6623. [Google Scholar] [CrossRef]
- Mocera, F. A Model-Based Design Approach for a Parallel Hybrid Electric Tractor Energy Management Strategy Using Hardware in the Loop Technique. Vehicles 2020, 3, 1. [Google Scholar] [CrossRef]
- Tebaldi, D.; Zanasi, R. Modeling Control and Simulation of a Parallel Hybrid Agricultural Tractor. In Proceedings of the 2021 29th Mediterranean Conference on Control and Automation (MED), PUGLIA, Italy, 22–25 June 2021; IEEE: Piscataway, NJ, USA; pp. 317–323. [Google Scholar]
- Scolaro, E.; Alberti, L.; Barater, D. Electric Drives for Hybrid Electric Agricultural Tractors. In Proceedings of the 2021 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Modena, Italy, 8–9 April 2021; IEEE: Piscataway, NJ, USA; pp. 331–336. [Google Scholar]
- Xu, L.; Liu, E.; Liu, M. Energy management strategy of fuel cell and storage battery hybrid electric tractor. J. Henan Univ. Sci. Technol. Nat. Sci. 2019, 40, 80–86. [Google Scholar]
- Jia, C.; Qiao, W.; Qu, L. Modeling and Control of Hybrid Electric Vehicles: A Case Study for Agricultural Tractors. In Proceedings of the 2018 IEEE Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, USA, 27–30 August 2018; IEEE: Piscataway, NJ, USA; pp. 1–6. [Google Scholar]
- Li, Q.; Zou, X.; Pu, Y.; Chen, W. A real-time energy management method for electric-hydrogen hybrid energy storage microgrid based on DP-MPC. CSEE J. Power Energy Syst. 2020, 1–13. [Google Scholar] [CrossRef]
- Li, T.; Xie, B.; Wang, D.; Zhang, S.; Wu, L. Real-time adaptive energy management strategy for dual-motor-driven electric tractors. Trans. Chin. Soc. Agric. Mach. 2020, 51, 530–543. [Google Scholar]
- Li, Y.; Liu, L.; Jin, T.; Yuan, K.; Chen, Y. Energy control strategy of electric tractor power supply based on dynamic programming. Trans. Chin. Soc. Agric. Mach. 2020, 51, 403–410. [Google Scholar]
- Tian, X.; Cai, Y.; Sun, X.; Zhu, Z.; Xu, Y. An adaptive ECMS with driving style recognition for energy optimization of parallel hybrid electric buses. Energy 2019, 189, 116151. [Google Scholar] [CrossRef]
- Xie, P.; Tan, S.; Guerrero, J.M.; Vasquez, J.C. MPC-informed ECMS based real-time power management strategy for hybrid electric ship. Energy Rep. 2021, 7, 126–133. [Google Scholar] [CrossRef]
- Yao, M.; Zhu, B.; Zhang, N. Adaptive real-time optimal control for energy management strategy of extended range electric vehicle. Energy Convers. Manag. 2021, 234, 113874. [Google Scholar] [CrossRef]
- Wang, S.; Huang, X.; Lopez, J.M.; Xu, X.; Dong, P. Fuzzy Adaptive-Equivalent Consumption Minimization Strategy for a Parallel Hybrid Electric Vehicle. IEEE Access 2019, 7, 133290–133303. [Google Scholar] [CrossRef]
- Geng, W.; Lou, D.; Zhang, T. Multi-objective energy management strategy for hybrid electric vehicle based on particle swarm optimization. J. Tongji Univ. Nat. Sci. 2020, 48, 1030–1039. [Google Scholar]
- Onori, S.; Serrao, L.; Rizzoni, G. Hybrid Electric Vehicles: Energy Management Strategies; Springer: London, UK, 2016. [Google Scholar]
- Siddique, M.A.A.; Kim, Y.-J.; Baek, S.-M.; Baek, S.-Y.; Han, T.-H.; Kim, W.-S.; Kim, Y.-S.; Lim, R.-G.; Choi, Y. Development of the Reliability Assessment Process of the Hydraulic Pump for a 78 kW Tractor during Major Agricultural Operations. Agriculture 2022, 12, 1609. [Google Scholar] [CrossRef]
- EPA Nonregulatory Nonroad Duty Cycles. Available online: https://www.epa.gov/moves/epa-nonregulatory-nonroad-duty-cycles (accessed on 15 March 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Parameters | Value |
|---|---|---|
| Tractor | Tractor mass | 8260 kg |
| Drive wheel radius | 0.875 m | |
| Engine | Rated power | 132 kW |
| Rated speed | 2300 rpm | |
| Maximum torque | 750 N∙m | |
| Minimum fuel consumption rate | 203 g/(kW∙h) | |
| Motor | Maximum/rated power | 85/45 kW |
| Maximum/rated torque | 130/250 N·m | |
| Battery | Rated capacity | 45 A∙h |
| Rated voltage | 360 V | |
| Driveline | HMCVT ratio | 1.0~3.57 |
| Final drive ratio | 3.7 | |
| Wheelside reduction ratio | 6.4 |
| Gears | Brake and Clutch Engagement Status | Speed Ratio ig | |||||
|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C5 | B | ||
| F(H) | ▲ | — | ▲ | — | ▲ | — | |
| R(H) | — | — | ▲ | ▲ | — | ▲ | |
| F(M) | ▲ | ▲ | — | — | — | — | 1 |
| F(HM1) | — | ▲ | ▲ | ▲ | — | — | |
| F(HM2) | ▲ | — | ▲ | ▲ | — | — | |
| ∆SOC | NB | NS | ZR | PS | PB | |
|---|---|---|---|---|---|---|
| dSOC | ||||||
| NB | PB | PS | PS | PS | ZR | |
| NS | PS | PS | PS | ZR | ZR | |
| ZR | PS | PS | ZR | NS | NS | |
| PS | PS | ZR | NS | NS | NS | |
| PB | ZR | NS | NS | NB | NB | |
| ∆SOC | NB | NS | ZR | PS | PB | |
|---|---|---|---|---|---|---|
| dSOC | ||||||
| NB | NB | NB | NB | NS | ZR | |
| NS | NB | NS | NS | ZR | ZR | |
| ZR | NS | NS | ZR | PS | PS | |
| PS | NS | ZR | PS | PS | PS | |
| PB | ZR | PS | PB | PB | PB | |
| Cycles | Fuel Consumption under ECMS | Fuel Consumption under FA-ECMS | Fuel Saving Rate |
|---|---|---|---|
| Plowing | 14.30 L | 13.34 L | 6.71% |
| Transport | 1.19 L | 1.13 L | 5.04% |
| Cycles | Initial SOC | Final SOC under ECMS | Final SOC under FA-ECMS |
|---|---|---|---|
| Plowing | 60% | 60.75% | 60.27% |
| Transport | 60% | 60.32% | 60.17% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Z.; Zeng, L.; Chen, L.; Zou, R.; Cai, Y. Fuzzy Adaptive Energy Management Strategy for a Hybrid Agricultural Tractor Equipped with HMCVT. Agriculture 2022, 12, 1986. https://doi.org/10.3390/agriculture12121986
Zhu Z, Zeng L, Chen L, Zou R, Cai Y. Fuzzy Adaptive Energy Management Strategy for a Hybrid Agricultural Tractor Equipped with HMCVT. Agriculture. 2022; 12(12):1986. https://doi.org/10.3390/agriculture12121986
Chicago/Turabian StyleZhu, Zhen, Lingxin Zeng, Long Chen, Rong Zou, and Yingfeng Cai. 2022. "Fuzzy Adaptive Energy Management Strategy for a Hybrid Agricultural Tractor Equipped with HMCVT" Agriculture 12, no. 12: 1986. https://doi.org/10.3390/agriculture12121986
APA StyleZhu, Z., Zeng, L., Chen, L., Zou, R., & Cai, Y. (2022). Fuzzy Adaptive Energy Management Strategy for a Hybrid Agricultural Tractor Equipped with HMCVT. Agriculture, 12(12), 1986. https://doi.org/10.3390/agriculture12121986