
De-Handing Technologies for Banana Postharvest Operations—Updates and Challenges




Abstract
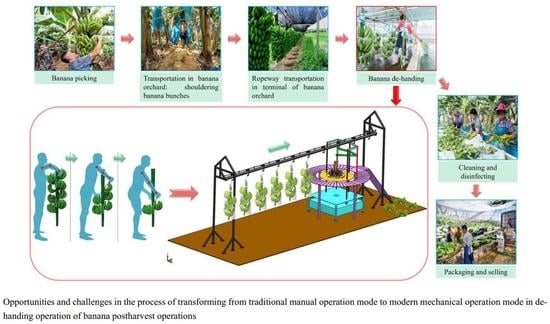
1. Introduction
2. Overview of De-Handing Methods
2.1. Traditional De-Handing Methods and Challenges
2.2. Mechanical De-Handing
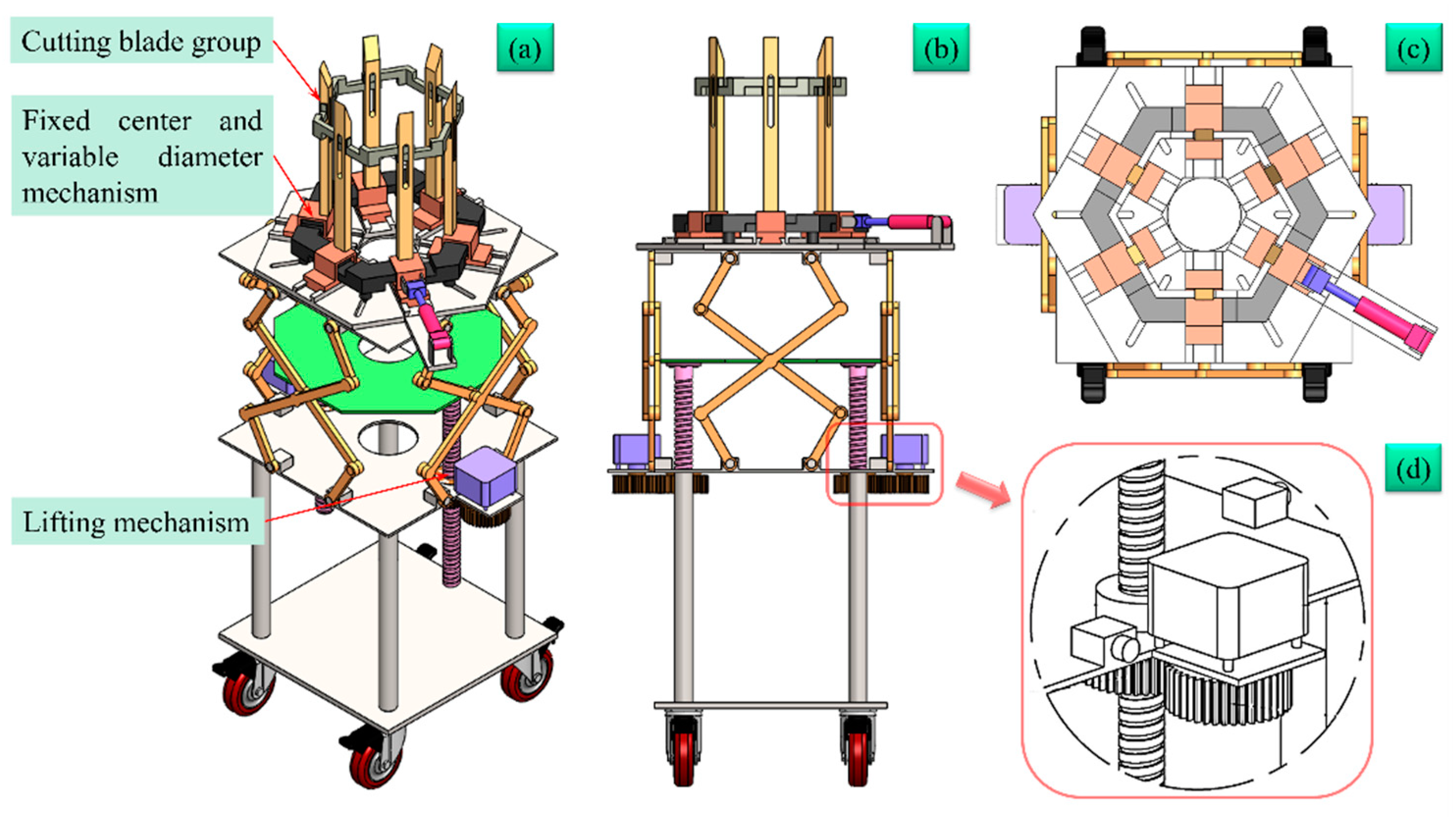
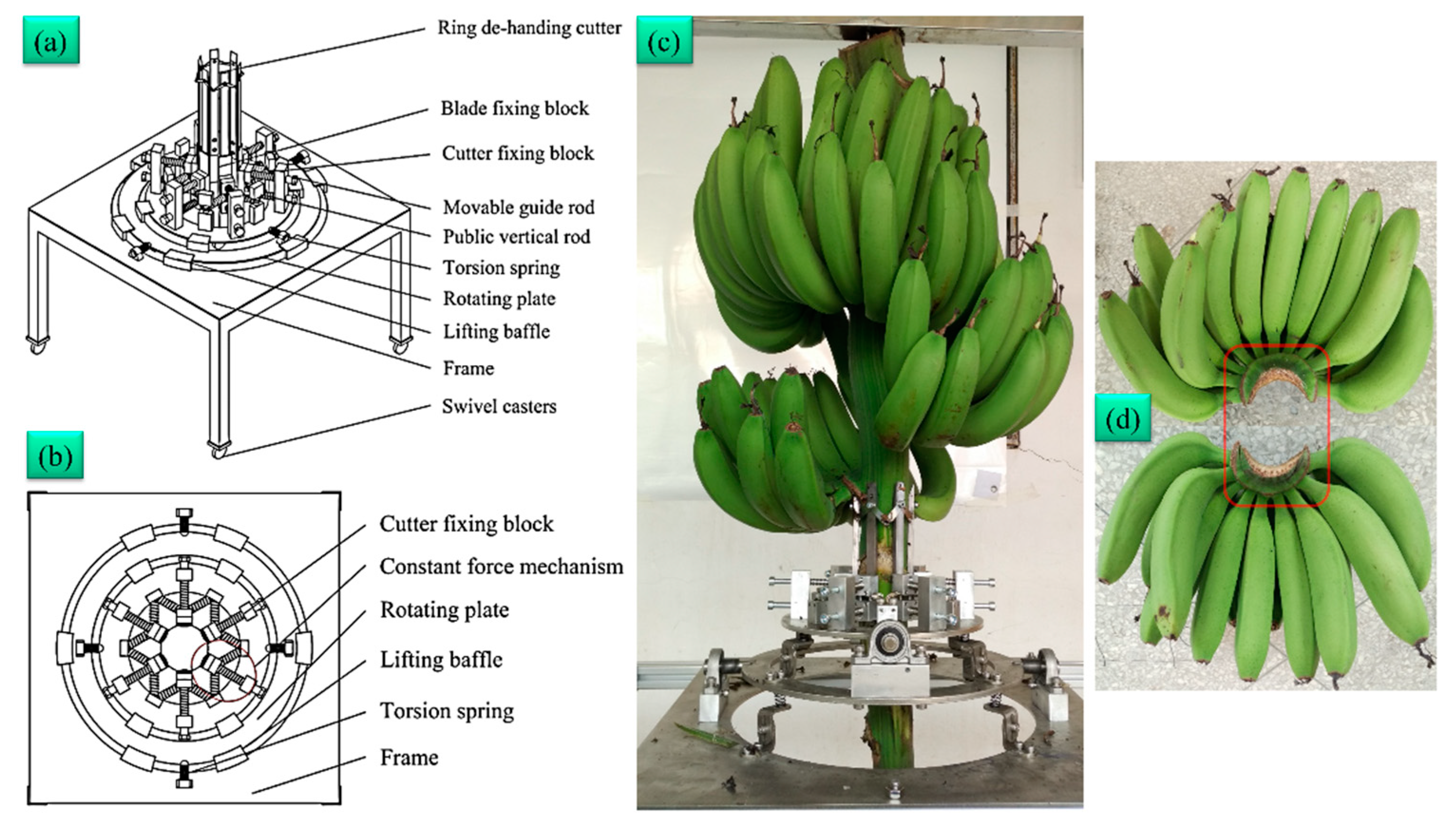
2.2.1. Circumferentially Rotating Mechanical De-Handing
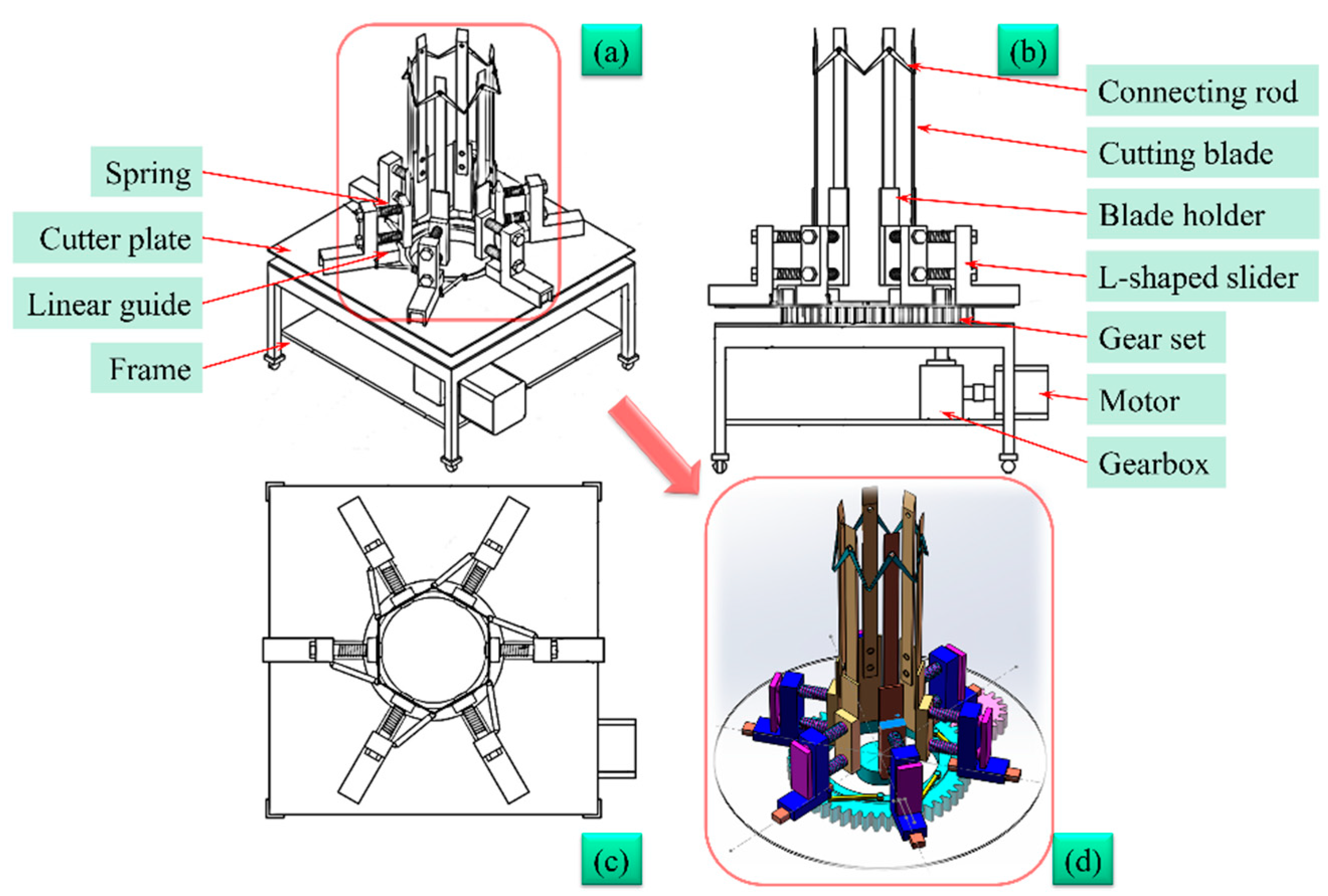
2.2.2. Mechanical De-Handing with Axial Plunge-Cutting
2.2.3. Evaluation of Mechanical De-Handing Technologies
3. Opportunities and Challenges
3.1. Development of Machine Vision Systems
3.2. Design of the Profiling Cutter
3.3. Robotic De-Handing
3.4. Fruit Quality Assessment
4. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, Y.; Xu, X. Current situation and development trend of banana industry in global. Trop. Agric. Eng. 2021, 45, 34–38. [Google Scholar]
- Ke, Y.; Guo, J.; Fang, J.; Ma, C.; Zhang, H. Analysis on the development trend of world banana production and trade. World Agric. 2008, 4, 38–39, 67. [Google Scholar]
- Xie, J. Fruit scientific research in New China in the past 70 years: Banana. J. Fruit Sci. 2019, 36, 1429–1440. [Google Scholar] [CrossRef]
- Guo, J.; Duan, J.; Li, J.; Yang, Z. Mechanized technology research and equipment application of banana post-harvesting: A review. Agronomy 2020, 10, 374. [Google Scholar] [CrossRef]
- Luo, X.; Liao, J.; Hu, L.; Zang, Y.; Zhou, Z. Improving agricultural mechanization level to promote agricultural sustainable development. Trans. Chin. Soc. Agric. Eng. 2016, 32, 1–11. [Google Scholar] [CrossRef]
- Guo, J.; Fu, H.; Yang, Z.; Li, J.; Jiang, Y.; Jiang, T.; Liu, E.; Duan, J. Research on the physical characteristic parameters of banana bunches for the design and development of post-harvesting machinery and equipment. Agriculture 2021, 11, 362. [Google Scholar] [CrossRef]
- Merino, G.; da Silva, L.; Mattos, D.; Guimarães, B.; Merino, E. Ergonomic evaluation of the musculoskeletal risks in a banana harvesting activity through qualitative and quantitative measures, with emphasis on motion capture (Xsens) and EMG. Int. J. Ind. Ergon. 2019, 69, 80–89. [Google Scholar] [CrossRef]
- Guo, J.; Karkee, M.; Yang, Z.; Fu, H.; Li, J.; Jiang, Y.; Jiang, T.; Liu, E.; Duan, J. Research of simulation analysis and experimental optimization of banana de-handing device with self-adaptive profiling function. Comput. Electron. Agric. 2021, 185, 106148. [Google Scholar] [CrossRef]
- Yang, Z.; Guo, J.; Jin, M.; Xu, Z.; Duan, J.; Mo, J.; Jin, H. A variable diameter self-adaptive rotary cutting banana de-handing cutter. China Pat. 2019, 11, 1–8. [Google Scholar]
- Xu, Z.; Yang, Z.; Duan, J.; Jin, M.; Mo, J.; Zhao, L.; Guo, J.; Yao, H. Design and experiment of symmetrical shape deployable arc profiling mechanism based on composite multi-cam structure. Symmetry 2019, 11, 958. [Google Scholar] [CrossRef]
- Duan, J.; Guo, J.; Yang, Z.; Fu, H.; L, J.; Jin, M.; Zhao, L.; Jiang, Y.; Jiang, T.; Ding, Y.; et al. A de-handing platform for self-adaptive banana bunch stalk. China Pat. 2021, 9, 1–9. [Google Scholar]
- Yang, Z.; Guo, J.; Jin, M.; Xu, Z.; Duan, J.; Mo, J.; Jin, H. A plunge-cut banana de-handing mechanism that with self-adaptive function to embrace bunch stalk. China Pat. 2019, 8, 1–8. [Google Scholar]
- Yang, Z.; Guo, J.; Jin, M.; Xu, Z.; Duan, J.; Mo, J.; Jin, H. A variable-diameter plunge-cut banana de-handing mechanism. China Pat. 2020, 12, 1–8. [Google Scholar]
- Yang, Z.; Guo, J.; Duan, J.; Jin, M.; Fu, H.; Sun, J.; Xie, H.; Mo, J.; Zhao, L.; Jiang, T. A variable diameter self-adaptive banana bunch stalk de-handing cutter based on wire cutting. China Pat. 2021, 2, 1–8. [Google Scholar]
- Yang, Z.; Guo, J.; Fu, H.; Jin, M.; Duan, J.; Sun, J.; Xie, H.; Zhao, L.; Xu, Z.; Ding, Y.; et al. Variable diameter plunge-cutting banana de-handing machine based on iris-gear-like mechanism. China Pat. 2020, 7, 1–13. [Google Scholar]
- Yang, Z.; Guo, J.; Duan, J.; Fu, H.; Li, J.; Jin, M.; Zhao, L.; Jiang, Y.; Jiang, T.; Liu, E.; et al. A synchronous self-centering and lifting straight-line cutting banana de-handing mechanism. China Pat. 2021, 12, 1–10. [Google Scholar]
- Guo, J.; Jin, M.; Duan, J.; Li, J.; Fu, H.; Zhao, L.; Xu, Z.; Ding, Y.; Jiang, Y.; Yang, Z. Design and experiment of banana de-handing device based on symmetrical shape deployable mechanism. Symmetry 2020, 12, 415. [Google Scholar] [CrossRef]
- Yang, Z.; Guo, J.; Jin, M.; Duan, J.; Fu, H.; Xu, Z. Design and analysis of self-adaptability in banana crown-cutting device based on constant-force mechanism. Trans. Chin. Soc. Agric. Mach. 2019, 50, 148–155. [Google Scholar] [CrossRef]
- Chen, M.; Tang, Y.; Zou, X.; Huang, Z.; Zhou, H.; Chen, S. 3D global mapping of large-scale unstructured orchard integrating eye-in-hand stereo vision and SLAM. Comput. Electron. Agric. 2021, 187, 106237. [Google Scholar] [CrossRef]
- Huang, Y.; Ren, Z.; Li, D.; Liu, X. Phenotypic techniques and applications in fruit trees: A review. Plant Methods 2020, 16, 1–22. [Google Scholar] [CrossRef]
- Zhang, X.; He, L.; Zhang, J.; Whiting, M.D.; Karkee, M.; Zhang, Q. Determination of key canopy parameters for mass mechanical apple harvesting using supervised machine learning and principal component analysis (PCA). Biosyst. Eng. 2020, 193, 247–263. [Google Scholar] [CrossRef]
- Lin, G.; Tang, Y.; Zou, X.; Wang, C. Three-dimensional reconstruction of guava fruits and branches using instance segmentation and geometry analysis. Comput. Electron. Agric. 2021, 184, 106107. [Google Scholar] [CrossRef]
- Zhang, X.; Karkee, M.; Zhang, Q.; Whiting, M.D. Computer vision-based tree trunk and branch identification and shaking points detection in Dense-Foliage canopy for automated harvesting of apples. J. Field Robot. 2021, 38, 476–493. [Google Scholar] [CrossRef]
- Li, J.; Tang, Y.; Zou, X.; Lin, G.; Wang, H. Detection of fruit-bearing branches and localization of litchi clusters for vision-based harvesting robots. IEEE Access 2020, 8, 117746–117758. [Google Scholar] [CrossRef]
- Majeed, Y.; Karkee, M.; Zhang, Q. Estimating the trajectories of vine cordons in full foliage canopies for automated green shoot thinning in vineyards. Comput. Electron. Agric. 2020, 176, 105671. [Google Scholar] [CrossRef]
- Fu, L.; Gao, F.; Wu, J.; Li, R.; Karkee, M.; Zhang, Q. Application of consumer RGB-D cameras for fruit detection and localization in field: A critical review. Comput. Electron. Agric. 2020, 177, 105687. [Google Scholar] [CrossRef]
- Tang, Y.; Chen, M.; Wang, C.; Luo, L.; Li, J.; Lian, G.; Zou, X. Recognition and localization methods for vision-based fruit picking robots: A Review. Front. Plant Sci. 2020, 11, 510. [Google Scholar] [CrossRef]
- Lin, G.; Tang, Y.; Zou, X.; Cheng, J.; Xiong, J. Fruit detection in natural environment using partial shape matching and probabilistic hough transform. Precis. Agric. 2020, 21, 160–177. [Google Scholar] [CrossRef]
- Xiong, J.; Lin, R.; Liu, Z.; He, Z.; Tang, L.; Yang, Z.; Zou, X. The recognition of litchi clusters and the calculation of picking point in a nocturnal natural environment. Biosyst. Eng. 2018, 166, 44. [Google Scholar] [CrossRef]
- Fu, L.; Feng, Y.; Wu, J.; Liu, Z.; Gao, F.; Majeed, Y.; Al-Mallahi, A.; Zhang, Q.; Li, R.; Cui, Y. Fast and accurate detection of kiwifruit in orchard using improved YOLOv3-tiny model. Precis. Agric. 2021, 22, 754–776. [Google Scholar] [CrossRef]
- Fu, L.; Tola, E.; Al-Mallahi, A.; Li, R.; Cui, Y. A novel image processing algorithm to separate linearly clustered kiwifruits. Biosyst. Eng. 2019, 183, 184–195. [Google Scholar] [CrossRef]
- Lin, G.; Tang, Y.; Zou, X.; Xiong, J.; Fang, Y. Color-, depth-, and shape-based 3D fruit detection. Precis. Agric. 2020, 21, 1–17. [Google Scholar] [CrossRef]
- Gao, F.; Fu, L.; Zhang, X.; Majeed, Y.; Li, R.; Karkee, M.; Zhang, Q. Multi-class fruit-on-plant detection for apple in SNAP system using Faster R-CNN. Comput. Electron. Agric. 2020, 176, 105634. [Google Scholar] [CrossRef]
- Zhang, J.; Karkee, M.; Zhang, Q.; Zhang, X.; Yaqoob, M.; Fu, L.; Wang, S. Multi-class object detection using faster R-CNN and estimation of shaking locations for automated shake-and-catch apple harvesting. Comput. Electron. Agric. 2020, 173, 105384. [Google Scholar] [CrossRef]
- Chen, M.; Tang, Y.; Zou, X.; Huang, K.; Huang, Z.; Zhou, H.; Wang, C.; Lian, G. Three-dimensional perception of orchard banana central stock enhanced by adaptive multi-vision technology. Comput. Electron. Agric. 2020, 174, 105508. [Google Scholar] [CrossRef]
- Fu, L.; Duan, J.; Zou, X.; Lin, G.; Song, S.; Ji, B.; Yang, Z. Banana detection based on color and texture features in the natural environment. Comput. Electron. Agric. 2019, 167, 105057. [Google Scholar] [CrossRef]
- Fu, L.; Duan, J.; Zou, X.; Lin, J.; Zhao, L.; Li, J.; Yang, Z. Fast and accurate detection of banana fruits in complex background orchards. IEEE Access 2020, 8, 196835–196846. [Google Scholar] [CrossRef]
- Wu, F.; Duan, J.; Chen, S.; Ye, Y.; Ai, P.; Yang, Z. Multi-target recognition of bananas and automatic positioning for the inflorescence axis cutting point. Front. Plant Sci. 2021, 12, 705021. [Google Scholar] [CrossRef]
- Guo, J.; Karkee, M.; Yang, Z.; Fu, H.; Li, J.; Jiang, Y.; Jiang, T.; Liu, E.; Duan, J. Discrete element modeling and physical experiment research on the biomechanical properties of banana bunch stalk for postharvest machine development. Comput. Electron. Agric. 2021, 188, 106308. [Google Scholar] [CrossRef]
- Barnea, E.; Mairon, R.; Ben-Shahar, O. Colour-agnostic shape-based 3D fruit detection for crop harvesting robots. Biosyst. Eng. 2016, 146, 57–70. [Google Scholar] [CrossRef]
- Chen, Y.; Yan, J.; Feng, J. Geometric and kinematic analyses and novel characteristics of origami-inspired structures. Symmetry 2019, 11, 1101. [Google Scholar] [CrossRef]
- Lee, D.Y.; Kim, S.R.; Kim, J.S.; Park, J.J.; Cho, K.J. Origami wheel transformer: A variable-diameter wheel drive robot using an origami structure. Soft Robot. 2017, 4, 163–180. [Google Scholar] [CrossRef]
- Ngo, T.H.; Chi, I.T.; Chau, M.Q.; Wang, D.A. An energy harvester based on a bistable origami mechanism. Int. J. Precis. Eng. Man. 2022, 23, 213–226. [Google Scholar] [CrossRef]
- Nathan, C.B.; Collin, Y.; Amanda, L.; Larry, L.H.; Spencer, P.M. Approaches for minimizing joints in single-degree-of-freedom origami-based mechanisms. J. Mech. Des. 2022, 144, 103301. [Google Scholar] [CrossRef]
- Larissa, M.F.; Guilherme, V.R.; Marcelo, A.S. An overview of the mechanical description of origami-inspired systems and structures. Int. J. Mech. Sci. 2022, 223, 107316. [Google Scholar] [CrossRef]
- Huang, H.; Li, B.; Zhang, T.; Zhang, Z.; Qi, X.; Hu, Y. Design of large single-mobility surface-deployable mechanism using irregularly shaped triangular prismoid modules. J. Mech. Des. Trans. ASME 2019, 141, 012301. [Google Scholar] [CrossRef]
- Cao, W.A.; Yang, D.; Ding, H. Topological structural design of umbrella-shaped deployable mechanisms based on new spatial closed-loop linkage units. J. Mech. Des. Trans. ASME 2018, 140, 062302. [Google Scholar] [CrossRef]
- Qi, X.; Huang, H.; Miao, Z.; Li, B.; Deng, Z. Design and mobility analysis of large deployable mechanisms based on plane-symmetric bricard linkage. J. Mech. Des. Trans. ASME 2017, 139, 022302. [Google Scholar] [CrossRef]
- Han, B.; Xu, Y.; Yao, J.; Zheng, D.; Guo, X.; Zhao, Y. Configuration synthesis of hoop truss deployable mechanisms for space antenna based on screw theory. AIP Adv. 2019, 9, 085201. [Google Scholar] [CrossRef]
- Han, B.; Xu, Y.; Yao, J.; Zheng, D.; Li, Y.; Zhao, Y. Design and analysis of a scissors double-ring truss deployable mechanism for space antennas. Aerosp. Sci. Technol. 2019, 93, 105357. [Google Scholar] [CrossRef]
- Qi, X.; Huang, H.; Li, B.; Deng, Z. A large ring deployable mechanism for space satellite antenna. Aerosp. Sci. Technol. 2016, 58, 498–510. [Google Scholar] [CrossRef]
- Xu, Y.; Guan, F.; Xu, X.; Wang, H.; Zheng, Y. Development of a novel double-ring deployable mesh antenna. Int. J. Antennas Propag. 2012, 11, 1497–1500. [Google Scholar] [CrossRef]
- Humna, K.; Travis, J.E.; Aitazaz, A.F.; Farhat, A. Wild blueberry harvesting losses predicted with selective machine learning algorithms. Agriculture 2022, 12, 1657. [Google Scholar] [CrossRef]
- Bayu, T.P.; Krishna, S.I.; Buyung, A.F. Development of a handheld iot-based fruit harvester to support agrotourism. Microprocess. Microsy. 2022, 91, 104550. [Google Scholar] [CrossRef]
- Denchai, W.; Panarit, S.; Surasak, C. Automatic classification of the ripeness stage of mango fruit using a machine learning approach. Agri. Eng. 2022, 4, 32–47. [Google Scholar] [CrossRef]
- Meenakshi, S.K.; Santhakumar, M. Selective fruit harvesting: Research, trends and developments towards fruit detection and localization–A review. P. I Mech. Eng. C-J. Mec. 2022, 10, 09544062221128443. [Google Scholar] [CrossRef]
- Zhou, H.; Xiao, J.; Kang, H.; Wang, X.; Au, W.; Chen, C. Learning-based slip detection for robotic fruit grasping and manipulation under leaf interference. Sensors 2022, 22, 5483. [Google Scholar] [CrossRef]
- Fu, L.; Majeed, Y.; Zhang, X.; Karkee, M.; Zhang, Q. Faster R–CNN–based apple detection in dense-foliage fruiting-wall trees using RGB and depth features for robotic harvesting. Biosyst. Eng. 2020, 197, 245–256. [Google Scholar] [CrossRef]
- Lin, G.; Zhu, L.; Li, J.; Zou, X.; Tang, Y. Collision-free path planning for a guava-harvesting robot based on recurrent deep reinforcement learning. Comput. Electron. Agric. 2021, 188, 106350. [Google Scholar] [CrossRef]
- Ye, L.; Duan, J.; Yang, Z.; Zou, X.; Chen, M.; Zhang, S. Collision-free motion planning for the litchi-picking robot. Comput. Electron. Agric. 2021, 185, 106151. [Google Scholar] [CrossRef]
- Williams, H.A.M.; Jones, M.H.; Nejati, M.; Seabright, M.J.; Bell, J.; Penhall, N.D.; Barnett, J.J.; Duke, M.D.; Scarfe, A.J.; Ahn, H.S.; et al. Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and robotic arms. Biosyst. Eng. 2019, 181, 140–156. [Google Scholar] [CrossRef]
- Wang, C.; Liu, B.; Liu, L.; Zhu, Y.; Hou, J.; Liu, P.; Li, X. A review of deep learning used in the hyperspectral image analysis for agriculture. Artif. Intell. Rev. 2021, 54, 5205–5253. [Google Scholar] [CrossRef]
- Lu, B.; Dao, P.D.; Liu, J.; He, Y.; Shang, J. Recent advances of hyperspectral imaging technology and applications in agriculture. Remote Sens. 2020, 12, 2659. [Google Scholar] [CrossRef]
- Grieco, M.; Schmidt, M.; Warnemünde, S.; Backhaus, A.; Klück, H.C.; Garibay, A.; Moya, Y.A.; Jozefowicz, A.M.; Mock, H.P.; Seiffert, U.; et al. Dynamics and genetic regulation of leaf nutrient concentration in barley based on hyperspectral imaging and machine learning. Plant Sci. 2022, 315, 111123. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Chen, S.; Li, X.; Cunha, M.; Jayavelu, S.; Cammarano, D.; Fu, Y. Machine learning-based approaches for predicting SPAD values of maize using multi-spectral images. Remote Sens. 2022, 14, 1337. [Google Scholar] [CrossRef]
- Chang, S.; Lee, U.; Kim, J.B.; Jo, Y.D. Application of 3D-volumetric analysis and hyperspectral imaging systems for investigation of heterosis and cytoplasmic effects in pepper. Sci. Hortic. 2022, 302, 111150. [Google Scholar] [CrossRef]
- Wang, F.; Zhao, C.; Xu, B.; Xu, Z.; Li, Z.; Yang, H.; Duan, D.; Yang, G. Development of a portable detection device for the quality of fresh tea leaves using spectral technology. Trans. Chin. Soc. Agric. Eng. 2020, 36, 273–280. [Google Scholar] [CrossRef]
- Fu, X.; Ying, Y. Application of NIR and Raman spectroscopy for quality and safety inspection of fruits and vegetables: A Review. Trans. Chin. Soc. Agric. Mach. 2013, 44, 148–164. [Google Scholar] [CrossRef]
- Ahmad, U.; Nasirahmadi, A.; Hensel, O.; Marino, S. Technology and data fusion methods to enhance site-specific crop monitoring. Agronomy 2022, 12, 555. [Google Scholar] [CrossRef]
- Li, Y.; Chang, C.; Wang, Z.; Li, T.; Li, J.; Zhao, G. Identification of cultivated land quality grade using fused multi-source data and multi-temporal crop remote sensing information. Remote Sens. 2022, 14, 2109. [Google Scholar] [CrossRef]
- Sankaran, S.; Khot, L.R.; Espinoza, C.Z.; Jarolmasjed, S.; Sathuvalli, V.R.; Vandemark, G.J.; Miklas, P.N.; Carter, A.H.; Pumphrey, M.O.; Knowles, R.R.N.; et al. Low-altitude, high-resolution aerial imaging systems for row and field crop phenotyping: A review. Eur. J. Agron. 2015, 70, 112–123. [Google Scholar] [CrossRef]
- Xu, S.; Lu, H.; Zhou, Z.; Lv, E.; Jiang, Y. Identification for guava mechanical damage based on combined hyper spectrometer and electronic nose. Trans. Chin. Soc. Agric. Mach. 2015, 46, 214–219. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, W.; Fu, H.; Yang, Z.; Lu, H. Detachment patterns and impact characteristics of litchi fruit during vibrational harvesting. Sci. Hortic. Amst. 2022, 295, 110836. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, S.; Fu, H.; Lu, H.; Yang, Z. Evaluation of litchi impact damage degree and damage susceptibility. Comput. Electron. Agric. 2020, 173, 105409. [Google Scholar] [CrossRef]
- Wang, W.; Lu, H.; Zhang, S.; Yang, Z. Damage caused by multiple impacts of litchi fruits during vibration harvesting. Comput. Electron. Agric. 2019, 162, 732–738. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, W.; Wang, Y.; Fu, H.; Yang, Z. Improved prediction of litchi impact characteristics with an energy dissipation model. Postharvest Biol. Technol. 2021, 176, 111508. [Google Scholar] [CrossRef]
- Celik, H.K. Determination of bruise susceptibility of pears (Ankara variety) to impact load by means of FEM-based explicit dynamics simulation. Postharvest Biol. Technol. 2017, 128, 83–97. [Google Scholar] [CrossRef]
- Li, Z.; Wang, Y. A multiscale finite element model for mechanical response of tomato fruits. Postharvest Biol. Technol. 2016, 121, 19–26. [Google Scholar] [CrossRef]
- Scheffler, O.C.; Coetzee, C.J.; Opara, U.L. A discrete element model (DEM) for predicting apple damage during handling. Biosyst. Eng. 2018, 172, 29–48. [Google Scholar] [CrossRef]
- Li, X.; Du, Y.; Liu, L.; Mao, E.; Yang, F.; Wu, J.; Wang, L. Research on the constitutive model of low-damage corn threshing based on DEM. Comput. Electron. Agric. 2022, 194, 106722. [Google Scholar] [CrossRef]
- Fu, H.; Du, W.; Yang, J.; Wang, W.; Wu, Z.; Yang, Z. Bruise measurement of fresh market apples caused by repeated impacts using a pendulum method. Postharvest Biol. Technol. 2022, 195, 112143. [Google Scholar] [CrossRef]
- Luo, X.; Liao, J.; Zou, X.; Zhang, Z.; Zhou, Z.; Zang, Y.; Hu, L. Enhancing agricultural mechanization level through information technology. Trans. Chin. Soc. Agric. Eng. 2016, 32, 1–14. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| De-Handing Method | Figure Number | Success Rate of De-Handing | Incision Quality | Self-Adaptive Profiling Effect |
|---|---|---|---|---|
| Circumferential rotation method | Figure 5 | 60% | 6 | 6 |
| Figure 6 | 100% | 10 | 8 | |
| Figure 7 | 60% | 6 | 8 | |
| Axial plunge-cutting method | Figure 8 | 80% | 6 | 6 |
| Figure 9 | 80% | 6 | 6 | |
| Figure 10 | 60% | 6 | 6 | |
| Figure 11 | 80% | 6 | 6 | |
| Figure 12 | 80% | 8 | 8 | |
| Figure 13 | 100% | 8 | 8 | |
| Figure 14 | 100% | 10 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, J.; Duan, J.; Yang, Z.; Karkee, M. De-Handing Technologies for Banana Postharvest Operations—Updates and Challenges. Agriculture 2022, 12, 1821. https://doi.org/10.3390/agriculture12111821
Guo J, Duan J, Yang Z, Karkee M. De-Handing Technologies for Banana Postharvest Operations—Updates and Challenges. Agriculture. 2022; 12(11):1821. https://doi.org/10.3390/agriculture12111821
Chicago/Turabian StyleGuo, Jie, Jieli Duan, Zhou Yang, and Manoj Karkee. 2022. "De-Handing Technologies for Banana Postharvest Operations—Updates and Challenges" Agriculture 12, no. 11: 1821. https://doi.org/10.3390/agriculture12111821
APA StyleGuo, J., Duan, J., Yang, Z., & Karkee, M. (2022). De-Handing Technologies for Banana Postharvest Operations—Updates and Challenges. Agriculture, 12(11), 1821. https://doi.org/10.3390/agriculture12111821