

Simulation and Experiment of Sieving Process of Sieving Device for Tiger Nut Harvester

Abstract
:1. Introduction
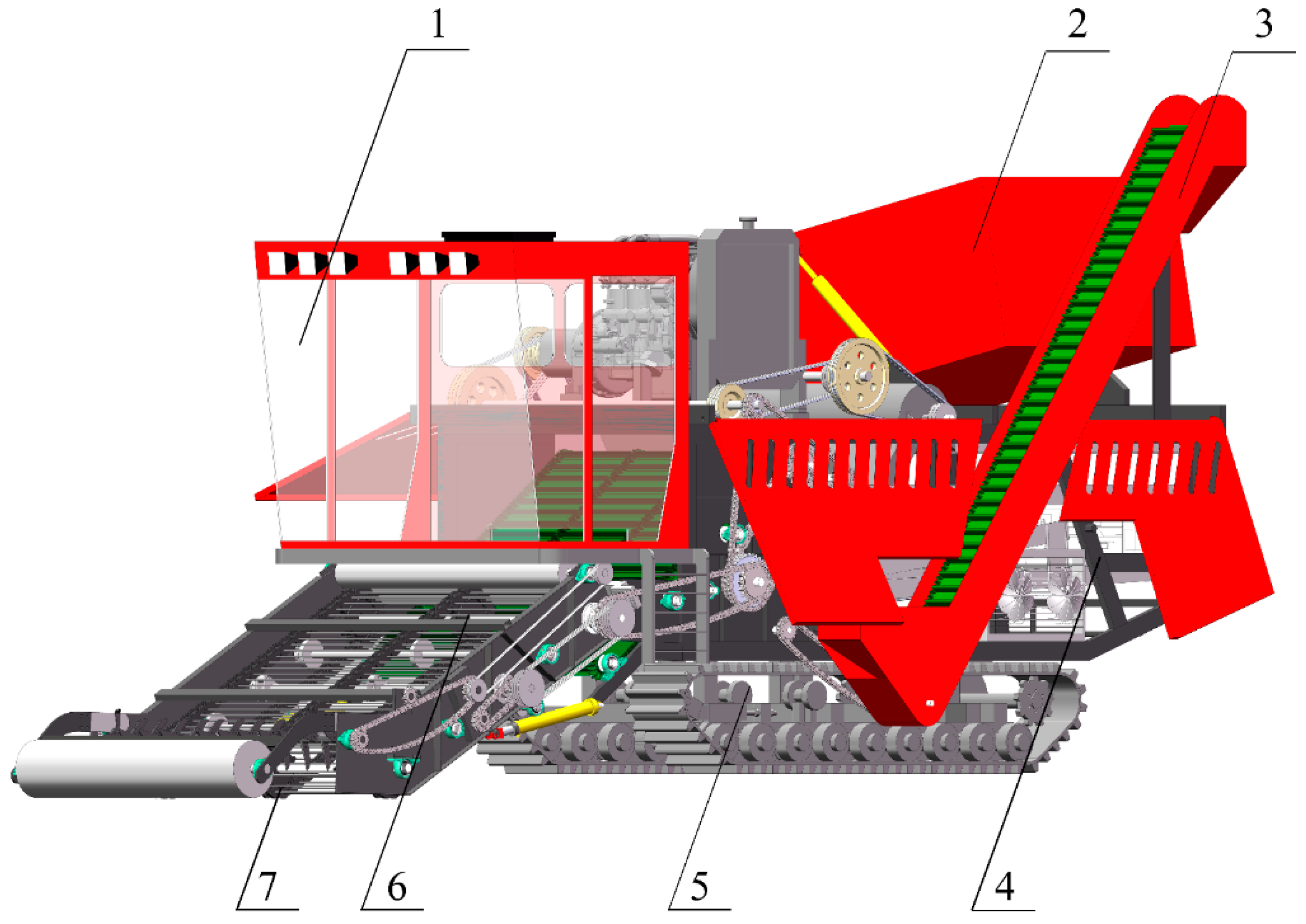
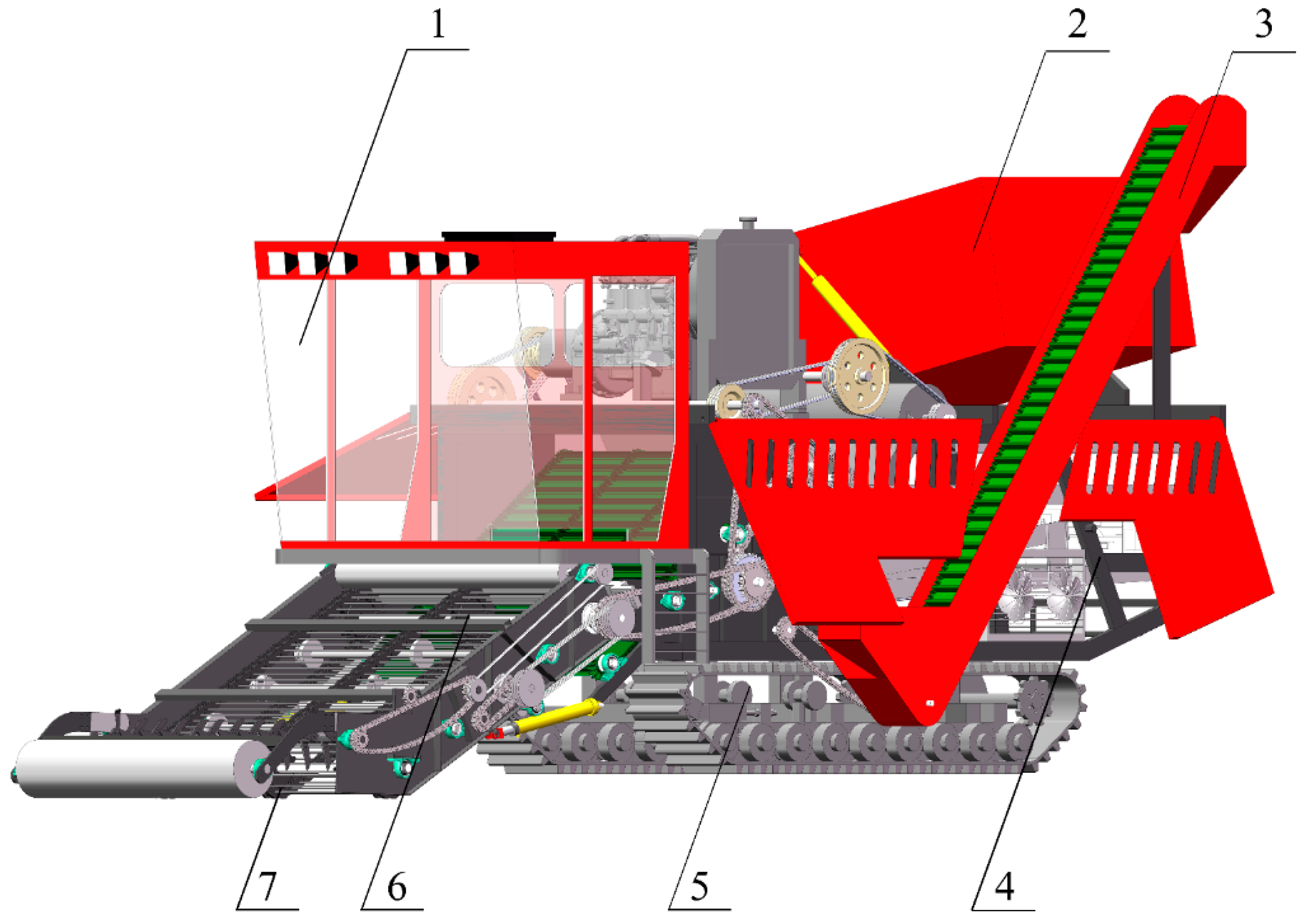
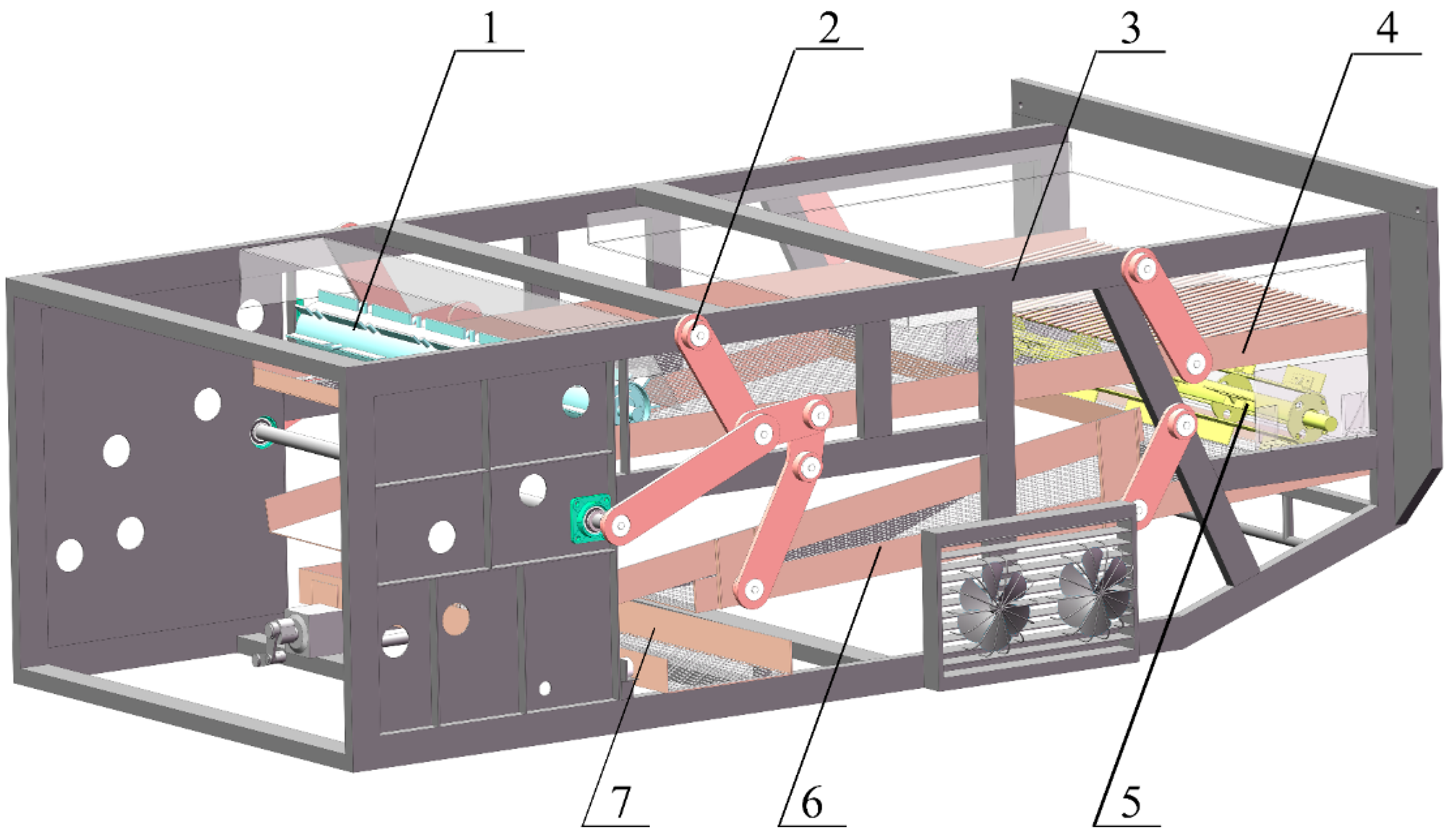
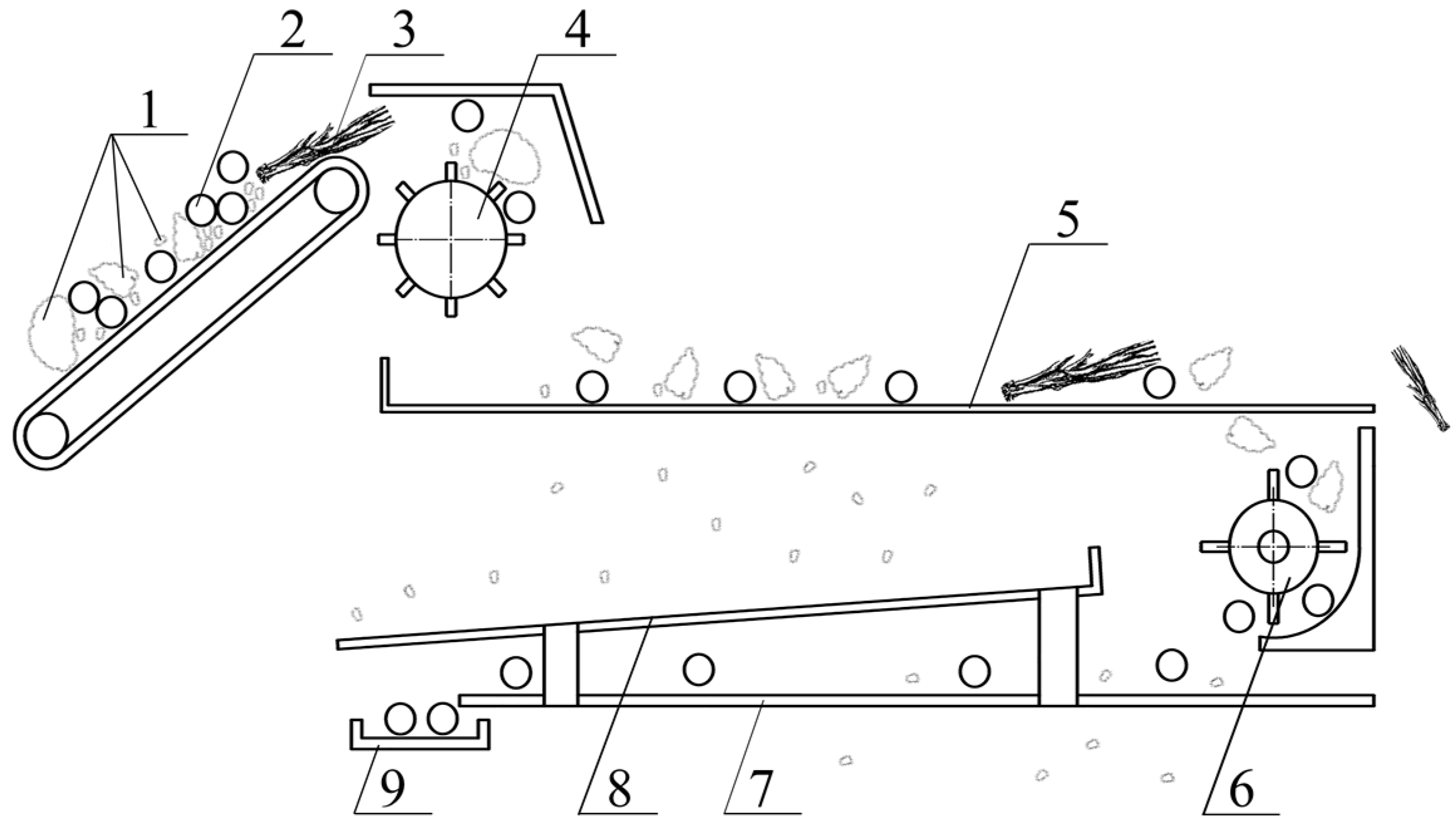
2. Structure and Working Principle of Screening Device
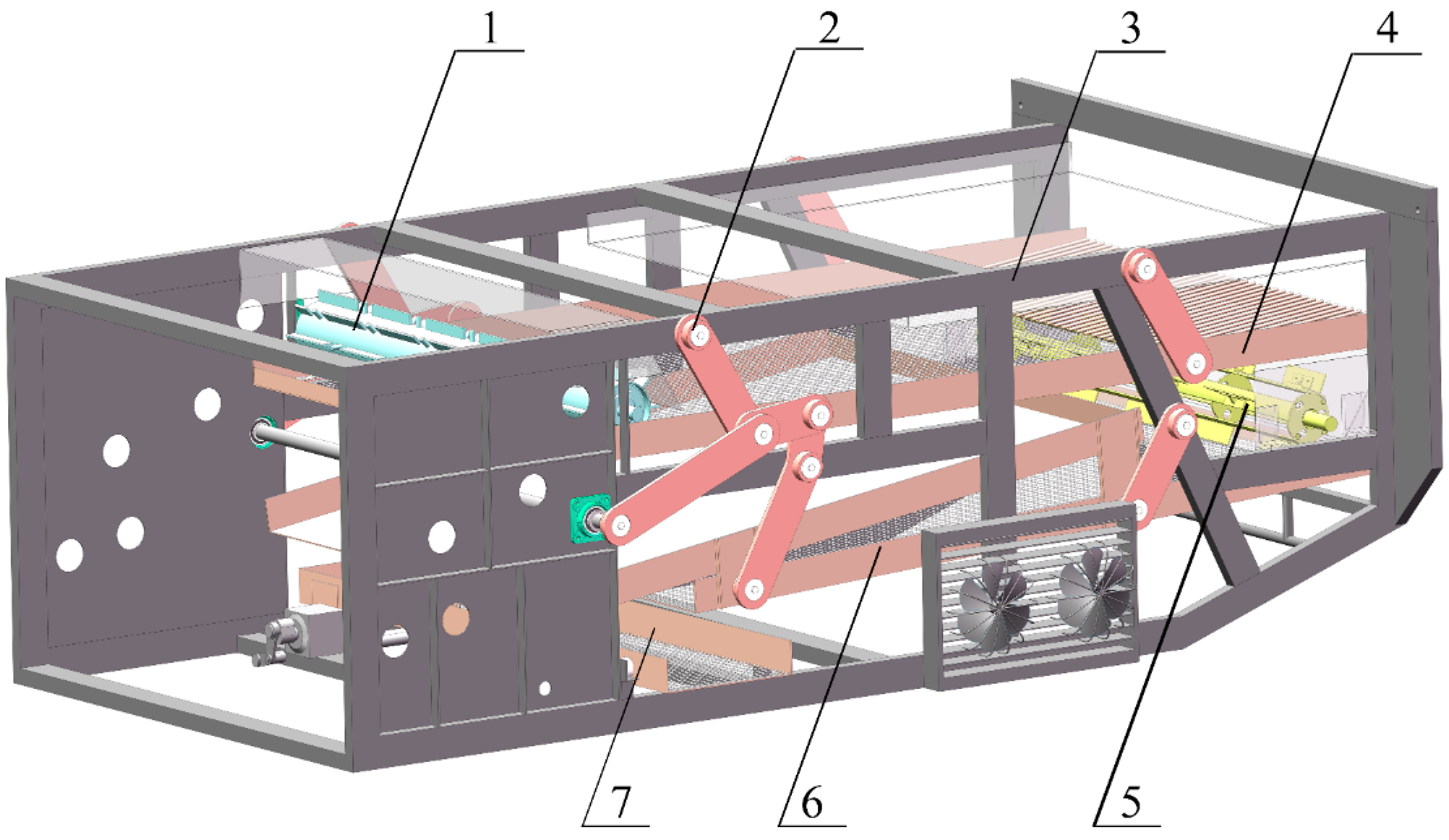
2.1. Structure of Screening Device
2.2. Working Principle
3. Analysis of the Process of Vibratory Screening of Exudate Particles
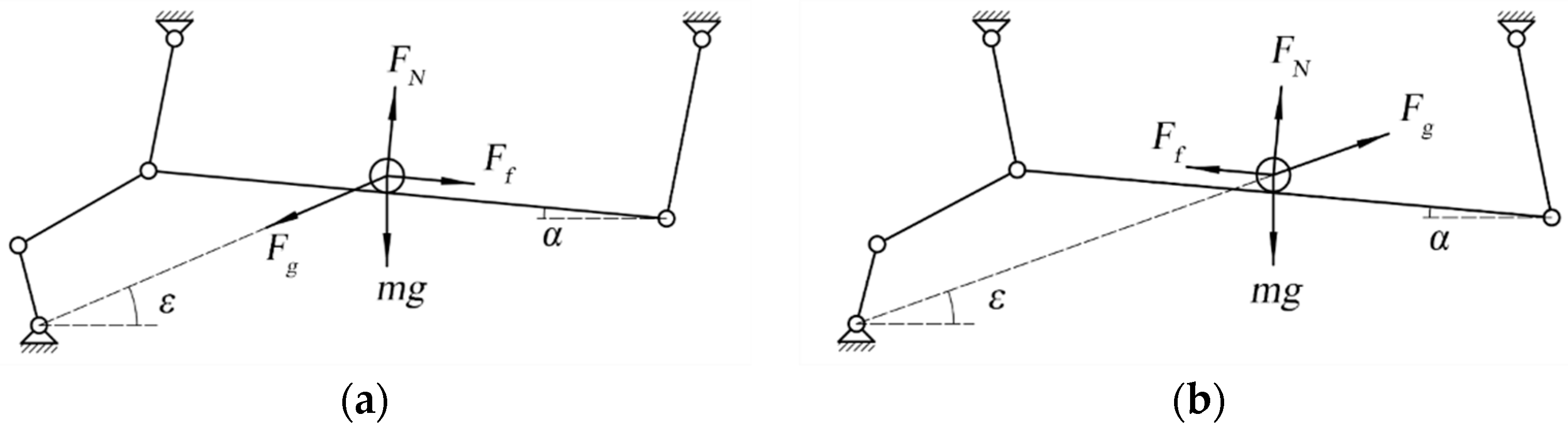
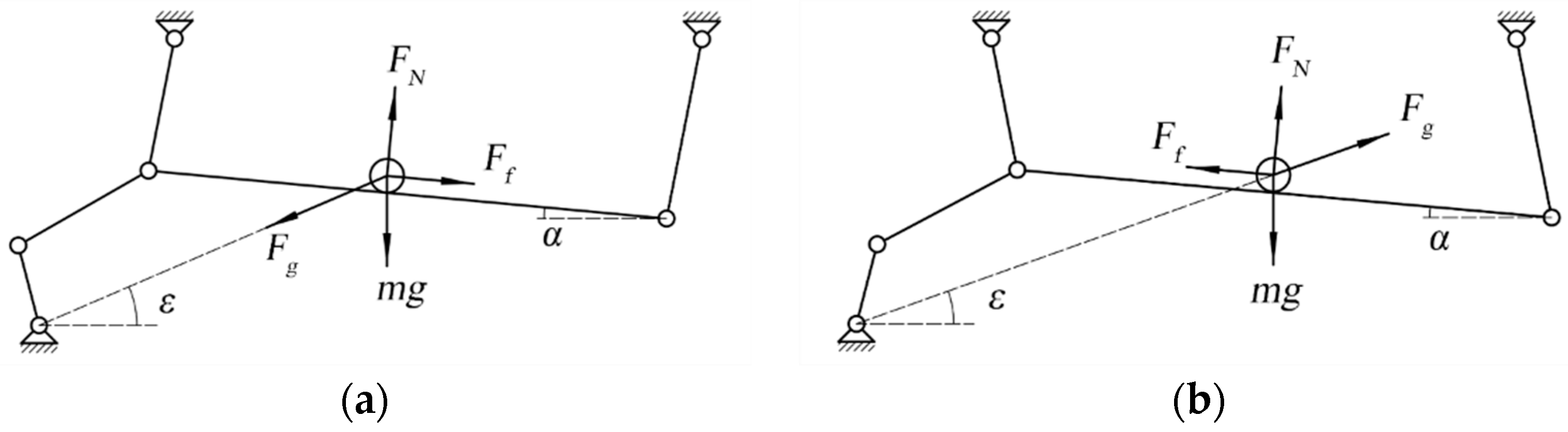
3.1. Movement Analysis of Tiger Nut
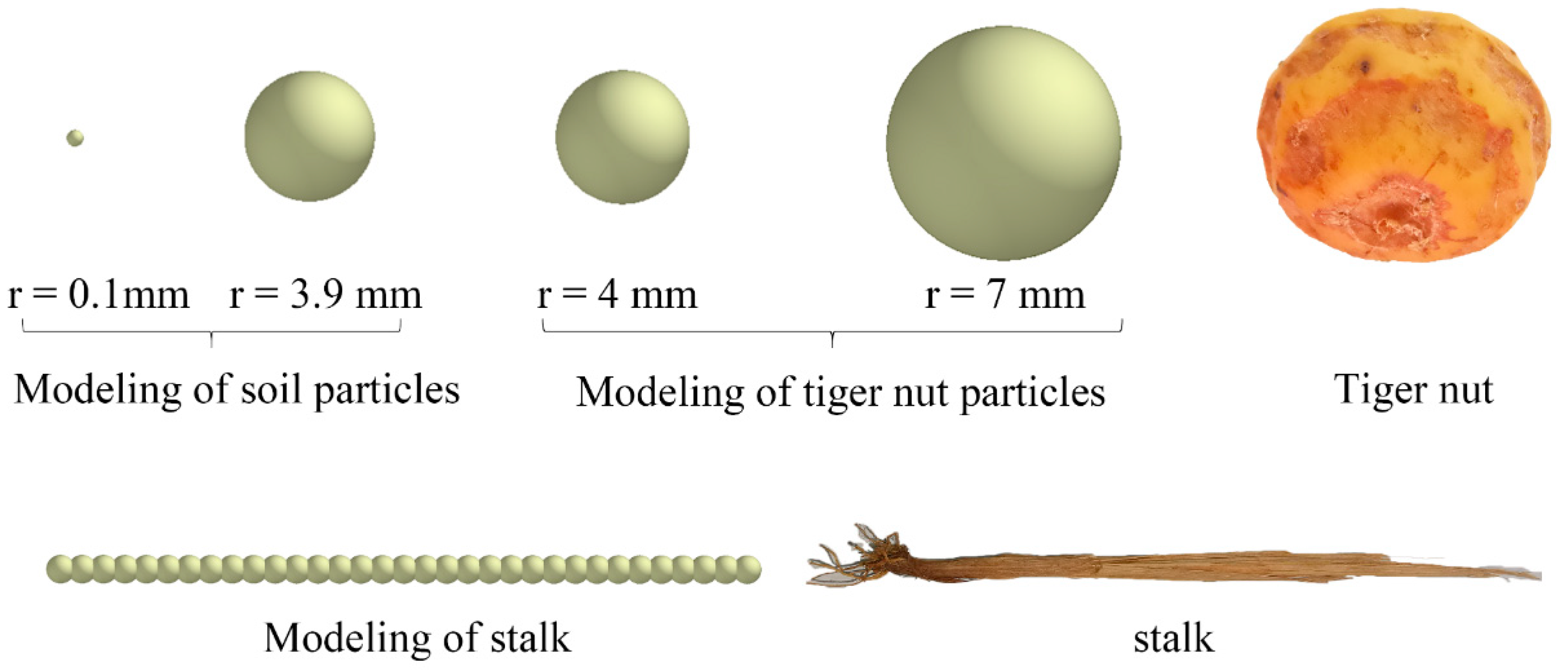
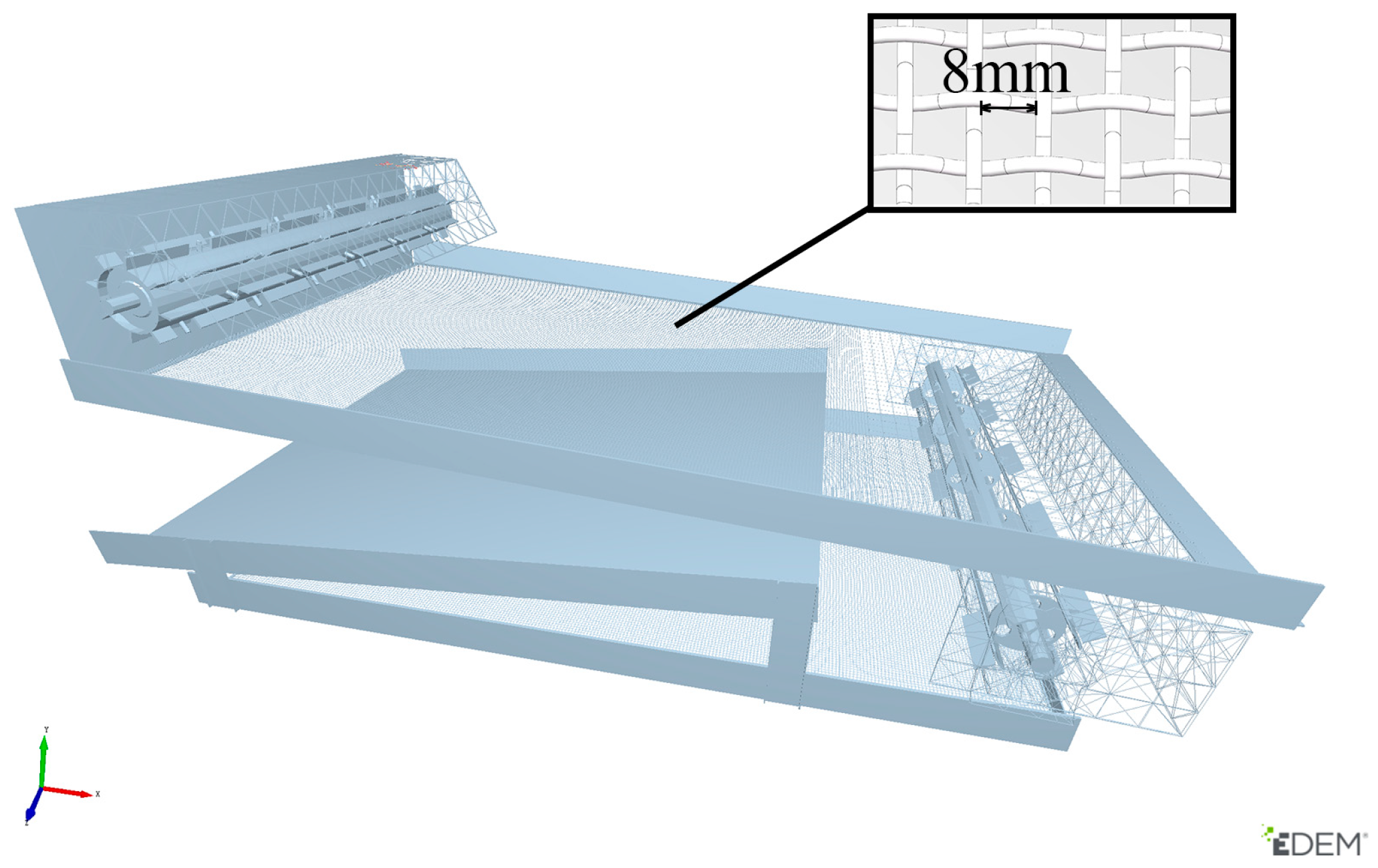
3.2. Modeling of Particles and Sieving Devices
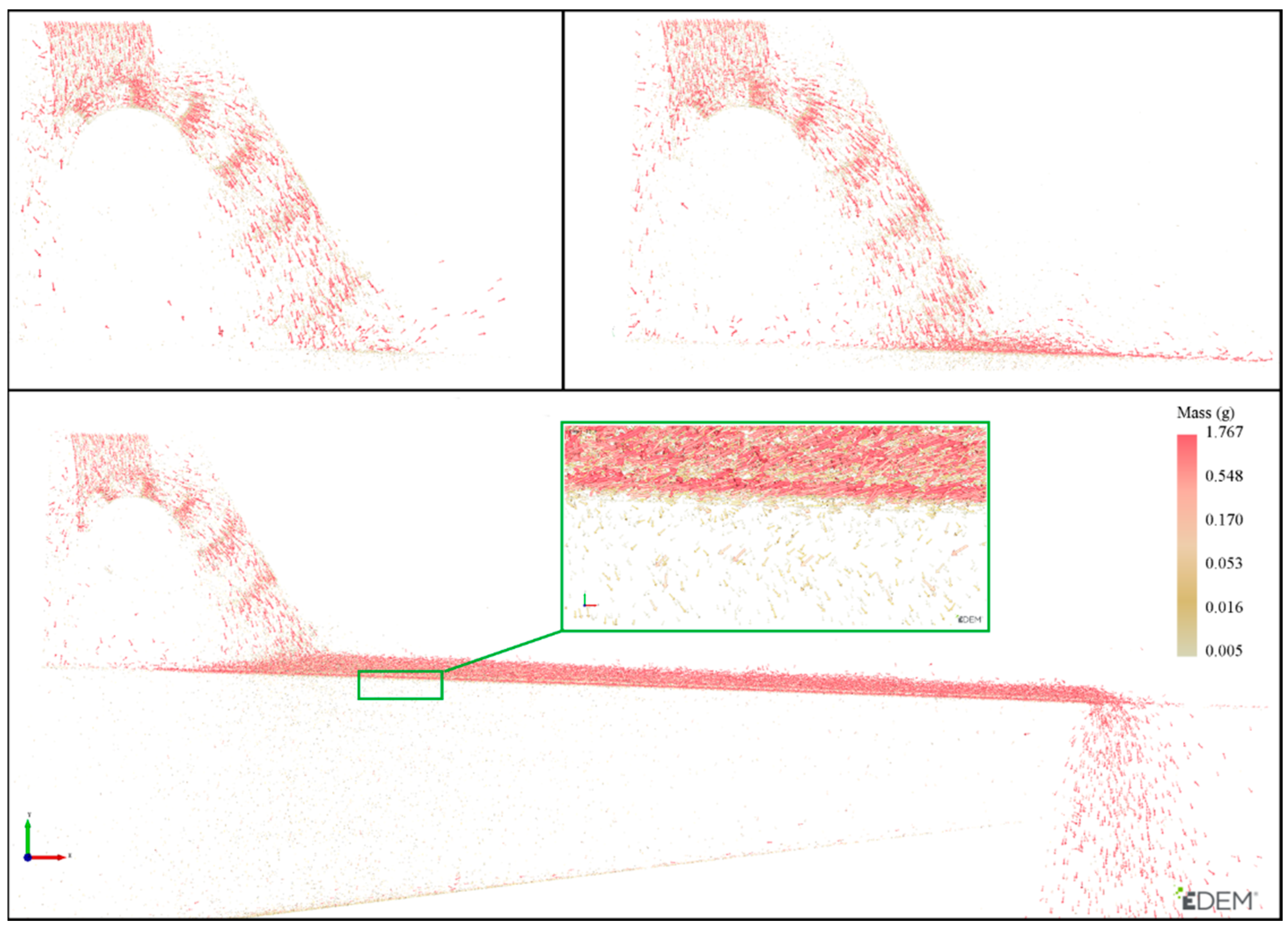
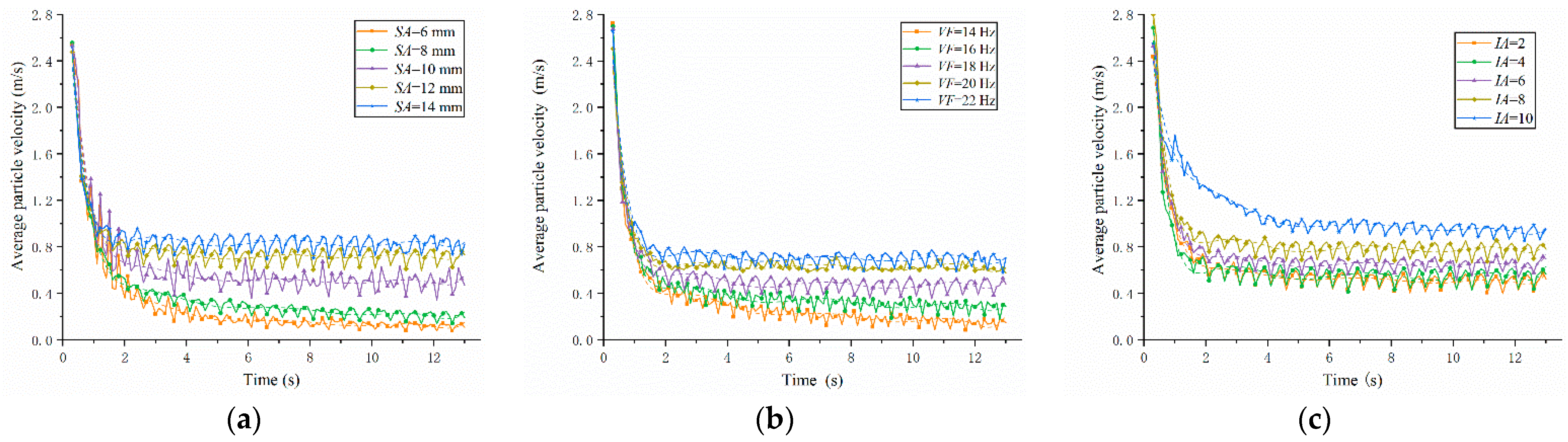
3.3. Effect of Factors on the Average Velocity of the Particle Population on the Screen
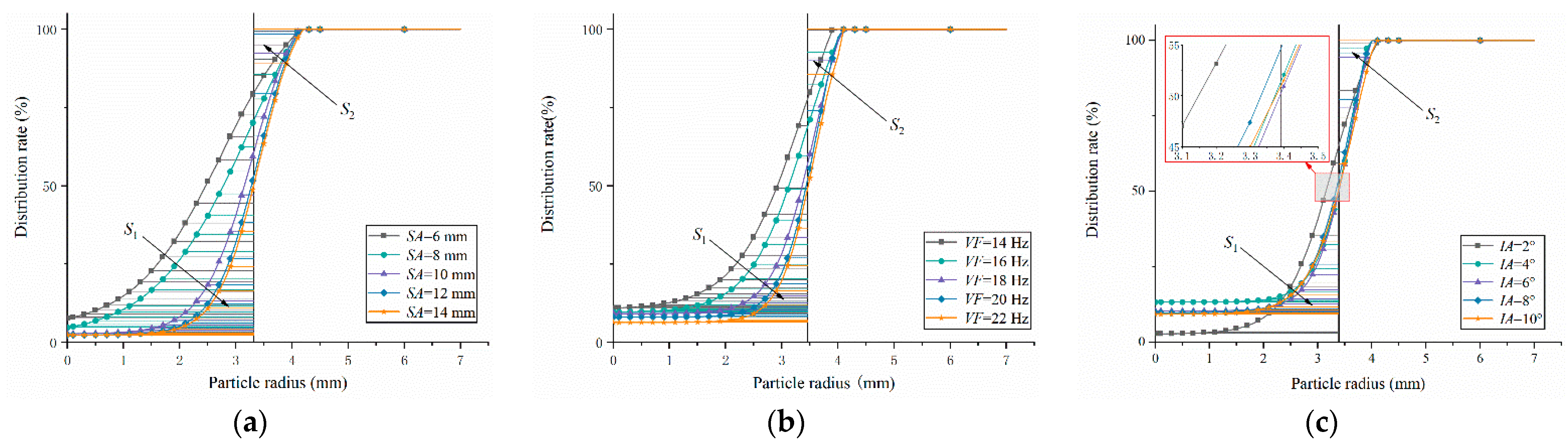
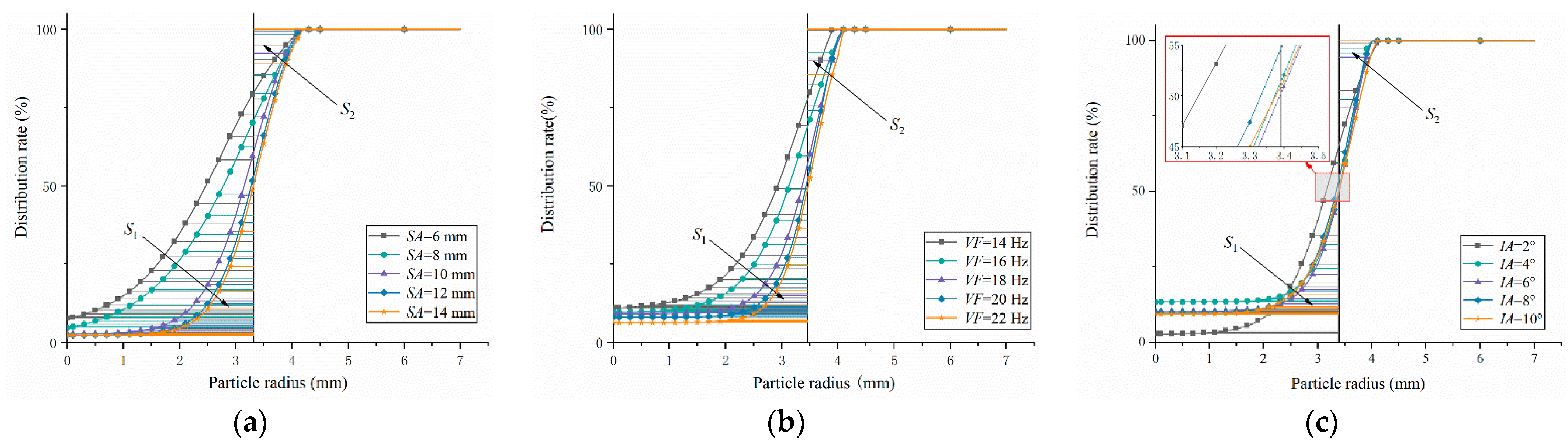
3.4. Effect of Factors on Distribution Particle Size
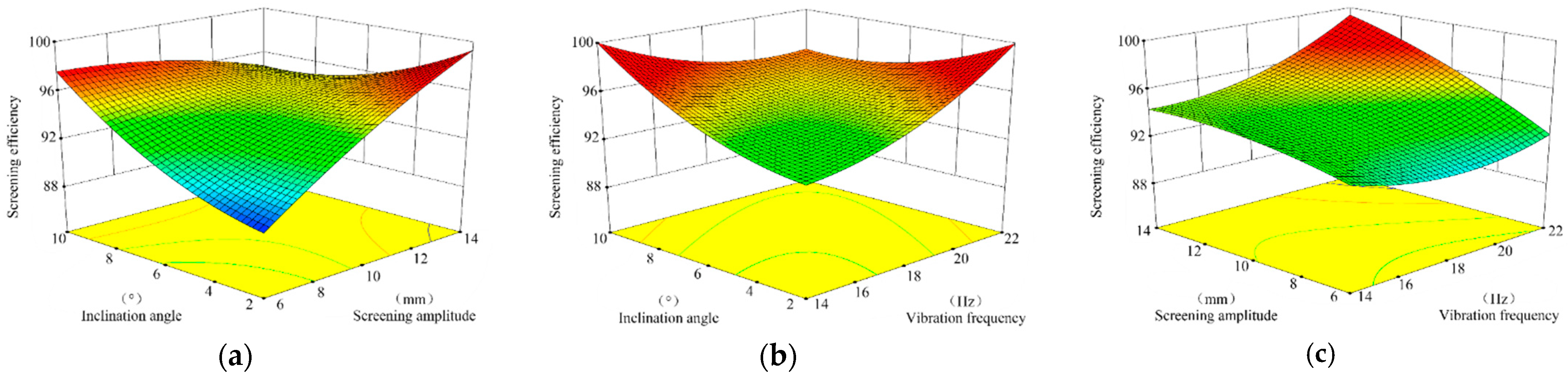
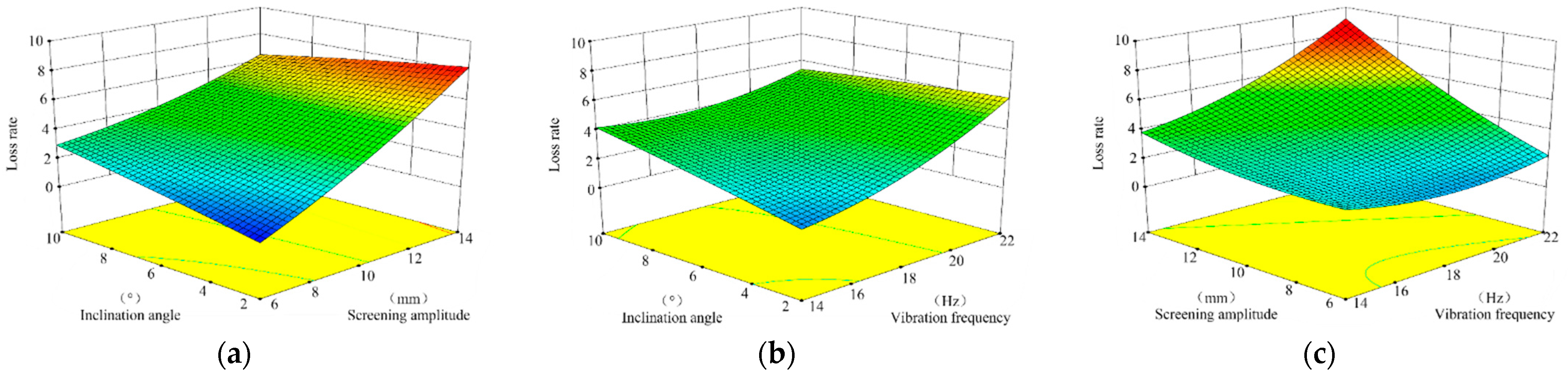
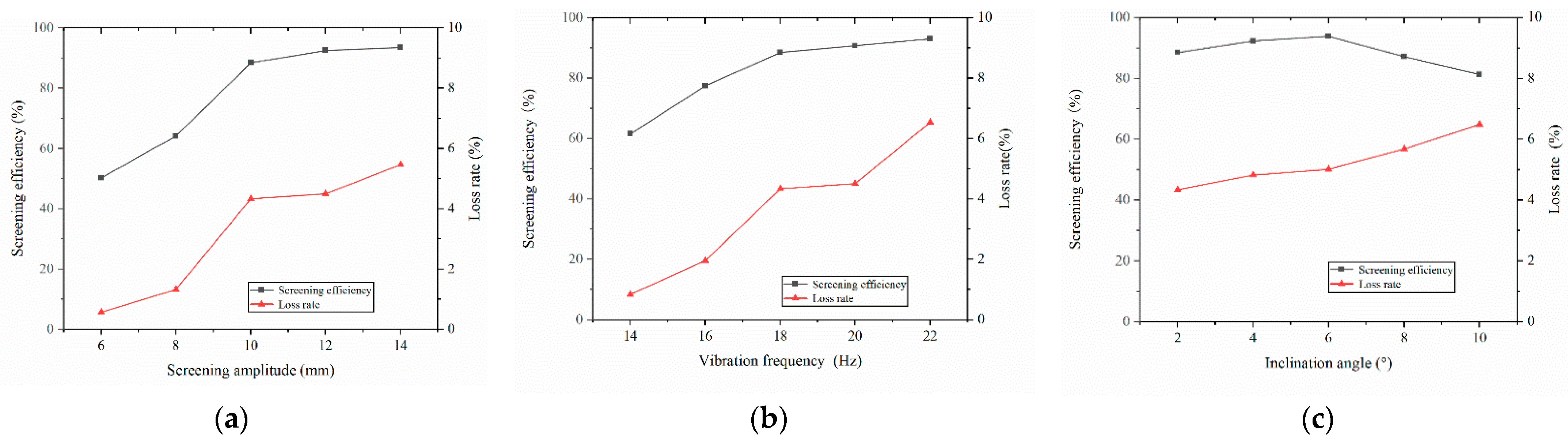
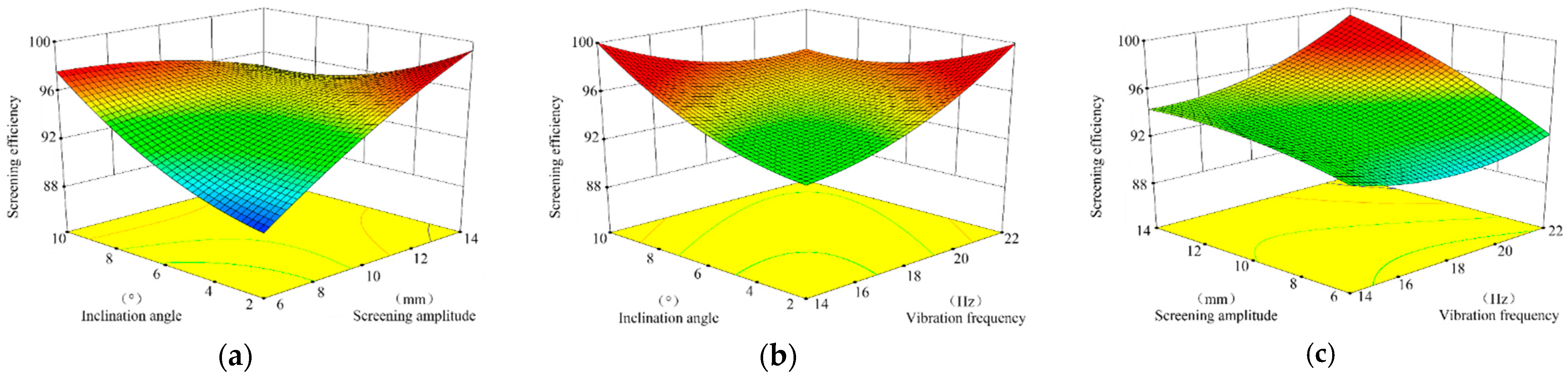
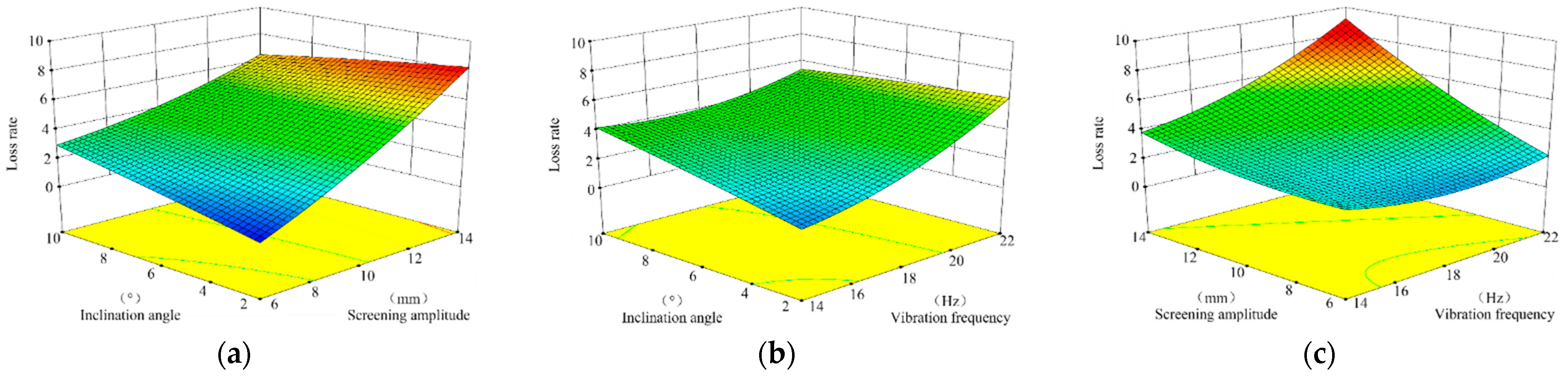
3.5. Effect of Various Factors on Screening Efficiency and Loss Rate
3.6. Impact of Interaction Terms and Optimization of Multiple Parameters
4. Field Trials
5. Discussion
6. Conclusions
- (1)
- Based on discrete element software, a model of soil particles and bean particles were established to clarify the effects of structural parameters and motion parameters (screen amplitude, vibration frequency and inclination angle) of the device on the bean and soil separation process and sieving performance.
- (2)
- The simulation analysis reveals that the average velocity of the particle population gradually decreases along the direction of motion during the sieving process, and the influence of each factor on the average velocity during the motion of the particle population of the detritus is similar, all showing an increasing trend. The effects of amplitude and frequency on the distribution size are consistent, both showing a gradual increase, reaching 3.32 mm for an amplitude of 14 mm and 3.46 mm for a frequency of 22 Hz. The distribution particle size increases with the increase of the screen inclination angle and then decreases, and the distribution particle size reaches the maximum value of 3.39 mm when the screen inclination angle is 6°.
- (3)
- The field harvesting test shows that the average values of screening efficiency and loss rate are 92.87% and 0.83%, respectively, at the sieve amplitude of 14 mm, vibration frequency of 10 Hz and inclination angle of 2°, which meet the design requirements of the tiger nut harvester. These results are basically consistent with the simulation test results, verifying the accuracy of the simulation results.
7. Patents
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yu, Y.; Lu, X.; Zhang, T.; Zhao, C.; Guan, S.; Pu, Y.; Gao, F. Tiger Nut (Cyperus esculentus L.): Nutrition, Processing, Function and Applications. Foods 2022, 11, 601. [Google Scholar] [CrossRef]
- Selma-Royo, M.; García-Mantrana, I.; Collado, M.C.; Perez-Martínez, G. Intake of Natural, Unprocessed Tiger Nuts (Cyperus esculentus L.) Drink Significantly Favors Intestinal Beneficial Bacteria in a Short Period of Time. Nutrients 2022, 14, 1709. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.M.; Liu, Z.H.; Liang, Y.; Xiao, S.P. Development of multifunctional harvesting machine based on modular theory. J. Chin. Agric. Mech. 2012, 05, 47–50. [Google Scholar]
- Su, T.; Han, Z.; Cui, J.; Wang, G.X.; Hao, X.M.; Hao, F.P. Research status and development trend of cleaning unit of cereal combine harvesters. J. Agric. Mech. Res. 2016, 38, 6–11, (In Chinese with English Abstract). [Google Scholar]
- Lizhang, X.; Yang, L.; Yaoming, L.; Xiaoyu, C.H.A.I.; Jie, Q.I.U. Research progress on cleaning technology and deviceof grain combine harvester. Trans. Chin. Soc. Agric. Mach. 2019, 50, 10, (In Chinese with English Abstract). [Google Scholar]
- Xia, X.; Jing, W.; Zhang, Z.; Wang, L.; Zhang, H. Simulation research, application status and development trend of vibrating screen. J. Cent. South Univ. (Sci. Technol.) 2020, 51, 2689–2706, (In Chinese with English Abstract). [Google Scholar]
- Lijun, W.A.N.G.; Lianglai, S.O.N.G.; Xin, F.E.N.G.; Housheng, W.A.N.G.; Yihang, L.I. Research status and development analysis of screening devices of grain combine harvester. Trans. Chin. Soc. Agric. Mach. 2021, 52, 6, (In Chinese with English Abstract). [Google Scholar]
- Yaoming, L.; Zhihua, W.; Lizhang, X. Motion analysis and experimentasl research of rape extractions on vibration sieve. Trans. Chin. Soc. Agric. Eng. 2007, 23, 111–114, (In Chinese with English Abstract). [Google Scholar]
- Zhichao, H.; Youqing, C.; Hai’ou, W. Design and experimental research on vibrating type peanut harvester. Trans. Chin. Soc. Agric. Eng. 2008, 24, 114–117, (In Chinese with English Abstract). [Google Scholar]
- Jiang, S.; Shenglan, Q.; Xinzhong, W. Design and test on 4B-1200 type bulbus fritillariae ussuriensis medicinal material harvester. Trans. Chin. Soc. Agric. Eng. 2015, 31, 34–41, (In Chinese with English Abstract). [Google Scholar]
- Lü, J.; Tian, Z.; Wu, J.E.; Yang, Y.; Shang, Q.; Wang, Y.; Liu, Z. Design and experiment on 4U1Z vibrating potato digger. Trans. Chin. Soc. Agric. Eng. 2015, 31, 39–47, (In Chinese with English Abstract). [Google Scholar]
- Cao, L.; Zhang, Y.; Zhang, Y.; Li, Y. Influence of screen parameters optimization on screening efficiency of feed hammer mill. Trans. Chin. Soc. Agric. Eng. 2016, 32, 284–288, (In Chinese with English Abstract). [Google Scholar]
- Qiyang, W.; Wenfu, W.; Haotian, Z. Design and test of screw cleaning mechanism for corn. Trans. Chin. Soc. Agric. Eng. 2018, 34, 12–19, (In Chinese with English Abstract). [Google Scholar]
- Chao, C.; Jun, F.; Zhi, C.; Luquan, R. Effect of vibration parameters of vibrating screen for harvester on adhesion characteristics of threshed mixtures with different moistures. Trans. Chin. Soc. Agric. Eng. 2019, 35, 29–36, (In Chinese with English Abstract). [Google Scholar]
- Fanyi, L.; Jian, Z.; Jun, C. Construction of visco-elasto-plasticity contact model of vibratory screening and its parameters calibration for wheat. Trans. Chin. Soc. Agric. Eng. 2018, 34, 37–43, (In Chinese with English Abstract). [Google Scholar]
- Hou, Y.; Zhu, J.; Li, H.; Wu, X.; Jiang, R. DEM numerical simulation on rotary vibrating screen under balanced motion. CIESC J. 2021, 72, 2706–2717, (In Chinese with English Abstract). [Google Scholar]
- Chen, B.; Yan, J.-W.; Yin, Z.-J.; Sun, Z.-H.; Xiao, Y.-P. Multi-parameter optimization of high-frequency vibrating screen based on DEM. Chin. J. Eng. Des. 2021, 43, 852–861, (In Chinese with English Abstract). [Google Scholar]
- Yu, C.; Geng, R.; Wang, X. A Numerical Study of Separation Performance of Vibrating Flip-Flow Screens for Cohesive Particles. Minerals 2021, 11, 631. [Google Scholar] [CrossRef]
- Lijun, W.; Bo, P.; Huiqiang, S. Cleaning of maize mixture based on polyurethane rubber sieve. Trans. Chin. Soc. Agric. Mach. 2018, 49, 90–96, (In Chinese with English Abstract). [Google Scholar]
- Lijun, W.A.N.G.; Yang, M.A.; Xin, F.E.N.G.; Lianglai, S.O.N.G.; Jin, C.H.A.I. Design and experiment of segmented vibrating screen in cleaning device of maize grain harvester. Trans. Chin. Soc. Agric. Mach. 2020, 51, 89–100, (In Chinese with English Abstract). [Google Scholar]
- Zhongcai, W.E.I.; Guoliang, S.U.; Xueqiang, L.I.; Faming, W.A.N.G.; Chuanzhu, S.U.N.; Pengxiang, M.E.N.G. Parameter optimization and test of potato harvester wavy sieve based on EDEM. Trans. Chin. Soc. Agric. Mach. 2020, 51, 109–122, (In Chinese with English Abstract). [Google Scholar]
- Tijskens, E.; Ramon, H.; De Baerdemaeker, J. Discrete element modelling for process simulation in agriculture. J. Sound Vib. 2003, 266, 493–514. [Google Scholar] [CrossRef]
- Li, J.; Webb, C.; Pandiella, S.S.; Campbell, G.M. Discrete particle motion on sieves—A numerical study using the DEM simulation. Powder Technol. 2003, 133, 190–202. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Tang, Z.; Xu, L.; Zhao, Z. Numerical simulation and analysis of vibration screening based on EDEM. Trans. Chin. Soc. Agric. Eng. 2011, 27, 117–121, (In Chinese with English Abstrct). [Google Scholar]
- Li, H.; Li, Y.; Tang, Z.; Xu, L. Numerical simulation of material motion on vibrating screen of air-and-screen cleaning device based on CFD-DEM. Trans. Chin. Soc. Agric. Mach. 2012, 43, 79–84, (In Chinese with English Abstract). [Google Scholar]
- Tung, K.L.; Chang, T.H.; Lin, Y.F.; Chyang, C.S. DEM simulation of a 3D vertical vibratory screening process: The study of a simulated woven-mesh structure. AIChE J. 2011, 57, 918–928. [Google Scholar] [CrossRef]
- Wang, C.; Liu, Q.; Ma, L.; Li, L. Cottonseed particle motion Law in 3-DOF hybrid vibration screen surface. Trans. Chin. Soc. Agric. Eng. 2015, 31, 49–56, (In Chinese with English Abstract). [Google Scholar]
- Xingyu, W.; Caixia, S.; Yang, X.; Jiacheng, Y.; Haitong, L.; Qingxi, L. Design and experiment on cylinder sieve with different rotational speed in cleaning system for rape combine harvesters. Trans. Chin. Soc. Agric. Eng. 2018, 34, 27–35, (In Chinese with English Abstract). [Google Scholar]
- Zhang, X.; Wu, B.; Niu, L.K.; Xiong, X.; Dong, Z. Dynamic characteristics of two-way coupling between flip-flow screen and particles based on DEM. J. China Coal Soc. 2019, 44, 1930–1940, (In Chinese with English Abstract). [Google Scholar]
- Wang, H.; Li, J.; Jiang, H.S.; Zhao, J.; Peng, L.P. Virtual screening of a banana screen based on the 3D discrete element method. J. Univ. Sci. Technol. Beijing 2014, 36, 1583–1588, (In Chinese with English Abstract). [Google Scholar]
- Chen, W.; Donohue, T.; Katterfeld, A.; Williams, K. Comparative discrete element modelling of a vibratory sieving process with spherical and rounded polyhedron particles. Granul. Matter 2017, 19, 1–12. [Google Scholar] [CrossRef]
- Xiliang, Z.; Yuren, K.; Pengfei, S.; Yunfeng, X.; Cheng, C. Study on linear vibration separation particle size of ellipsoidal particles based on EDEM. J. Agric. Sci. 2018, 46, 188–191, (In Chinese with English Abstract). [Google Scholar]
- Zhanfu, L. Theoretical Research and Parameters Optimization of Vibrating Screening Based on Composite Motion of Translation and Swing; Huaqiao University: Xiamen, China, 2016; (In Chinese with English Abstract). [Google Scholar]
- Zhang, S.; Fu, J.; Zhang, R.; Zhang, Y.; Yuan, H. Experimental Study on the Mechanical Properties of Friction, Collision and Compression of Tiger Nut Tubers. Agriculture 2022, 12, 65. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. 3D DEM tillage simulation: Validation of a hysteretic spring (plastic) contact model for a sweep tool operating in a cohesionless soil. Soil Tillage Res. 2014, 144, 220–227. [Google Scholar] [CrossRef]
- Linrong, S.; Wuyun, Z.; Wei, S. Parameter calibration of soil particles contact model of farmland soil in northwest arid region based on discrete element method. Trans. Chin. Soc. Agric. Eng. 2017, 33, 181–187, (In Chinese with English Abstract). [Google Scholar]
- Ma, Z.; Li, Y.; Xu, L. Discrete-element method simulation of agricultural particles’ motion in variable-amplitude screen box. Comput Electron Agric 2015, 118, 92–99. [Google Scholar] [CrossRef]
- Ma, Z.; Li, Y.; Xu, L.; Chen, J.; Zhao, Z.; Tang, Z. Dispersion and migration of agricultural particles in a variable-amplitude screen box based on the discrete element method. Comput. Electron. Agric. 2017, 142, 173–180. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mechanical Parameters | Materials | Poisson Ratio | Density (kg/m³) | Shear Modulus (MPa) |
| Tiger nut | 0.18 | 1230 | 4 | |
| Soil particle | 0.26 | 1179 | 1.1 | |
| Steel | 0.27 | 7850 | 8 × 104 | |
| Stalk | 0.42 | 241 | 1.0 | |
| Contact coefficients | Materials | Collision recovery coefficient | Static friction coefficient | Dynamic friction coefficient |
| Tiger nut—Tiger nut | 0.48 | 0.10 | 0.34 | |
| Tiger nut—Soil particle | 0.49 | 0.25 | 0.42 | |
| Tiger nut—Steel | 0.62 | 0.07 | 0.25 | |
| Tiger nut—Stalk | 0.35 | 0.02 | 0.32 | |
| Soil particle—Soil particle | 0.14 | 0.27 | 0.56 | |
| Soil particle—Steel | 0.15 | 0.36 | 0.50 | |
| Soil particle—Stalk | 0.11 | 0.09 | 0.21 | |
| Stalk—Stalk | 0.26 | 0.01 | 0.32 | |
| Stalk—Steel | 0.43 | 0.03 | 0.45 |
| Type of Particles | Range of Particle Sizes (mm) | Mass Fraction (%) |
|---|---|---|
| Soil particles | 0.1~0.5 | 7 |
| 0.6~1 | 10 | |
| 1.1~1.5 | 17 | |
| 1.6~2 | 21 | |
| 2.1~2.5 | 18 | |
| 2.6~3 | 14 | |
| 3.1~3.5 | 9 | |
| 3.6~3.9 | 4 | |
| Tiger nut particles | 4~4.5 | 26 |
| 5 | 45 | |
| 6 | 19 | |
| 7 | 10 |
| Codes | Factors | ||
|---|---|---|---|
| X1 (Hz) Vibration Frequency | X2 (mm) Screen Amplitude | X3 (°) Inclination Angle | |
| −1 | 14 | 6 | 2 |
| −0.5 | 16 | 8 | 4 |
| 0 | 18 | 10 | 6 |
| 0.5 | 20 | 12 | 8 |
| 1 | 22 | 14 | 10 |
| No. | Factors | Evaluation Index | |||
|---|---|---|---|---|---|
| X1 (Hz) Vibration Frequency | X2 (mm) Screen Amplitude | X3 (°) Inclination Angle | Y1 (%) Screening Efficiency Rate | Y2 (%) Loss Rate | |
| 1 | −1 | −1 | −1 | 88.69 | 0.18 |
| 2 | −1 | −0.5 | −0.5 | 91.53 | 0.61 |
| 3 | −1 | 0 | 0 | 95.30 | 2.79 |
| 4 | −1 | 0.5 | 0.5 | 96.92 | 4.06 |
| 5 | −1 | 1 | 1 | 96.73 | 4.42 |
| 6 | −0.5 | −1 | −0.5 | 89.15 | 0.59 |
| 7 | −0.5 | −0.5 | 0 | 93.80 | 1.97 |
| 8 | −0.5 | 0 | 0.5 | 96.72 | 3.28 |
| 9 | −0.5 | 0.5 | 1 | 97.15 | 3.88 |
| 10 | −0.5 | 1 | −1 | 96.08 | 3.92 |
| 11 | 0 | −1 | 0 | 91.89 | 1.71 |
| 12 | 0 | −0.5 | 0.5 | 95.70 | 2.94 |
| 13 | 0 | 0 | 1 | 97.37 | 3.94 |
| 14 | 0 | 0.5 | −1 | 95.80 | 4.23 |
| 15 | 0 | 1 | −0.5 | 96.69 | 6.17 |
| 16 | 0.5 | −1 | 0.5 | 94.69 | 1.90 |
| 17 | 0.5 | −0.5 | 1 | 97.13 | 3.32 |
| 18 | 0.5 | 0 | −1 | 95.47 | 3.75 |
| 19 | 0.5 | 0.5 | −0.5 | 96.60 | 6.03 |
| 20 | 0.5 | 1 | 0 | 96.26 | 7.30 |
| 21 | 1 | −1 | 1 | 96.02 | 3.44 |
| 22 | 1 | −0.5 | −1 | 96.03 | 2.80 |
| 23 | 1 | 0 | −0.5 | 96.56 | 5.51 |
| 24 | 1 | 0.5 | 0 | 97.18 | 7.26 |
| 25 | 1 | 1 | 0.5 | 96.79 | 8.09 |
| 26 | 0 | 0 | 0 | 94.24 | 3.31 |
| 27 | 0 | 0 | 0 | 94.65 | 2.95 |
| Name | Goal | Lower Limit | Upper Limit | Lower Weight | Upper Weight | Importance | Selected |
|---|---|---|---|---|---|---|---|
| X1 (Hz) | is in range | 14 | 22 | 1 | 1 | 3 | 14 |
| X2 (mm) | is in range | 6 | 14 | 1 | 1 | 3 | 10 |
| X3 (°) | is in range | 2 | 10 | 1 | 1 | 3 | 2 |
| Y1 (%) | maximize | 88.6899 | 97.368 | 1 | 1 | 2 | 91.73 |
| Y2 (%) | minimize | 0.180984 | 3 | 1 | 1 | 3 | 0.79 |
| No. | Screening Efficiency Rate (%) | Loss Rate (%) |
|---|---|---|
| 1 | 91.98 | 0.77 |
| 2 | 93.52 | 0.87 |
| 3 | 93.11 | 0.84 |
| Average | 92.87 | 0.83 |
| Standard deviation | 1.13 | 4.2 |
| Error of simulation results | 1.23 | 4.82 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhou, Z.; Qu, Z.; Li, Z.; Wang, W. Simulation and Experiment of Sieving Process of Sieving Device for Tiger Nut Harvester. Agriculture 2022, 12, 1680. https://doi.org/10.3390/agriculture12101680
Zhang H, Zhou Z, Qu Z, Li Z, Wang W. Simulation and Experiment of Sieving Process of Sieving Device for Tiger Nut Harvester. Agriculture. 2022; 12(10):1680. https://doi.org/10.3390/agriculture12101680
Chicago/Turabian StyleZhang, Hongmei, Zheng Zhou, Zhe Qu, Zhijie Li, and Wanzhang Wang. 2022. "Simulation and Experiment of Sieving Process of Sieving Device for Tiger Nut Harvester" Agriculture 12, no. 10: 1680. https://doi.org/10.3390/agriculture12101680
APA StyleZhang, H., Zhou, Z., Qu, Z., Li, Z., & Wang, W. (2022). Simulation and Experiment of Sieving Process of Sieving Device for Tiger Nut Harvester. Agriculture, 12(10), 1680. https://doi.org/10.3390/agriculture12101680