
Development of a Depth Control System Based on Variable-Gain Single-Neuron PID for Rotary Burying of Stubbles


Abstract
:1. Introduction
2. Materials and Methods
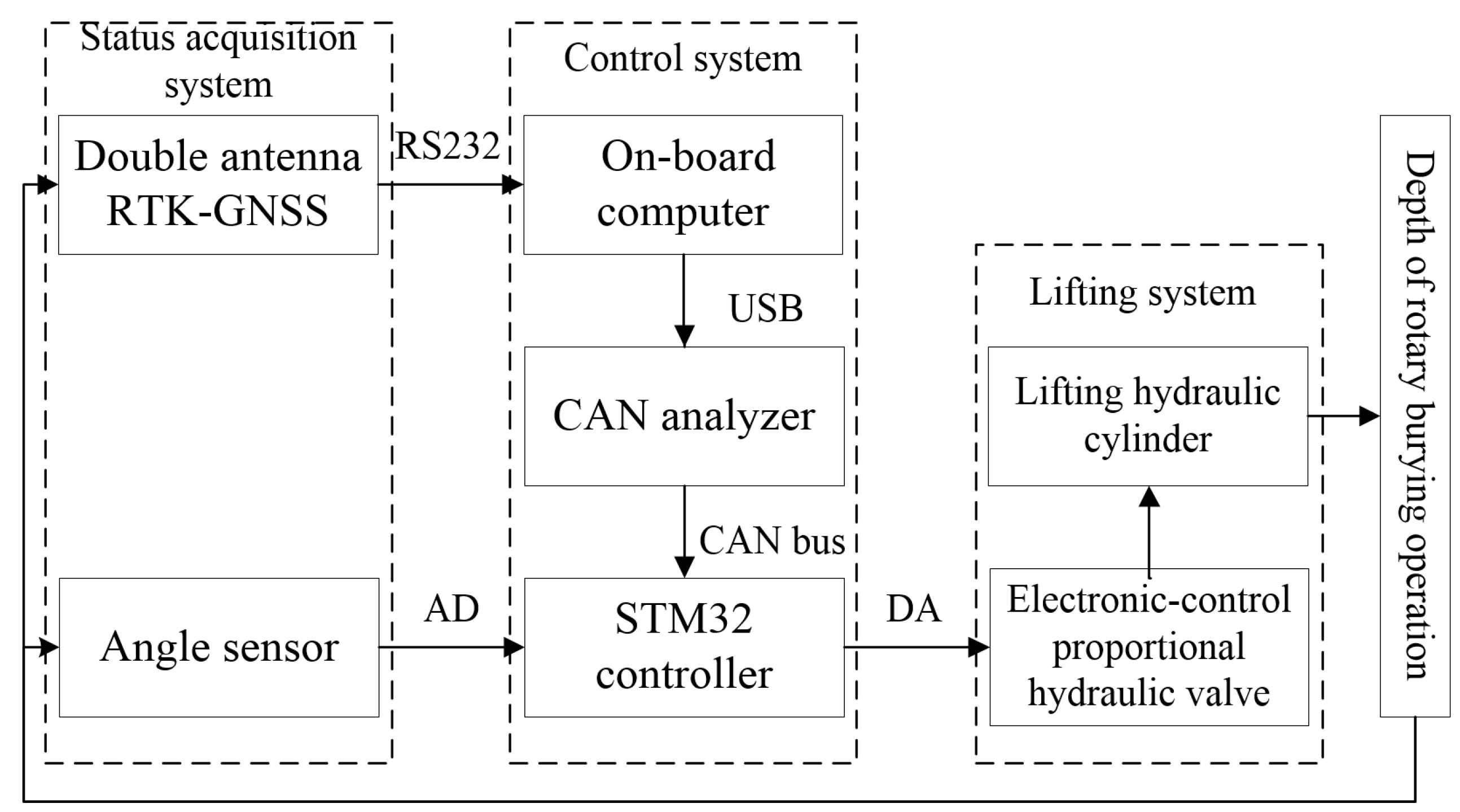
2.1. Depth Control System Structure
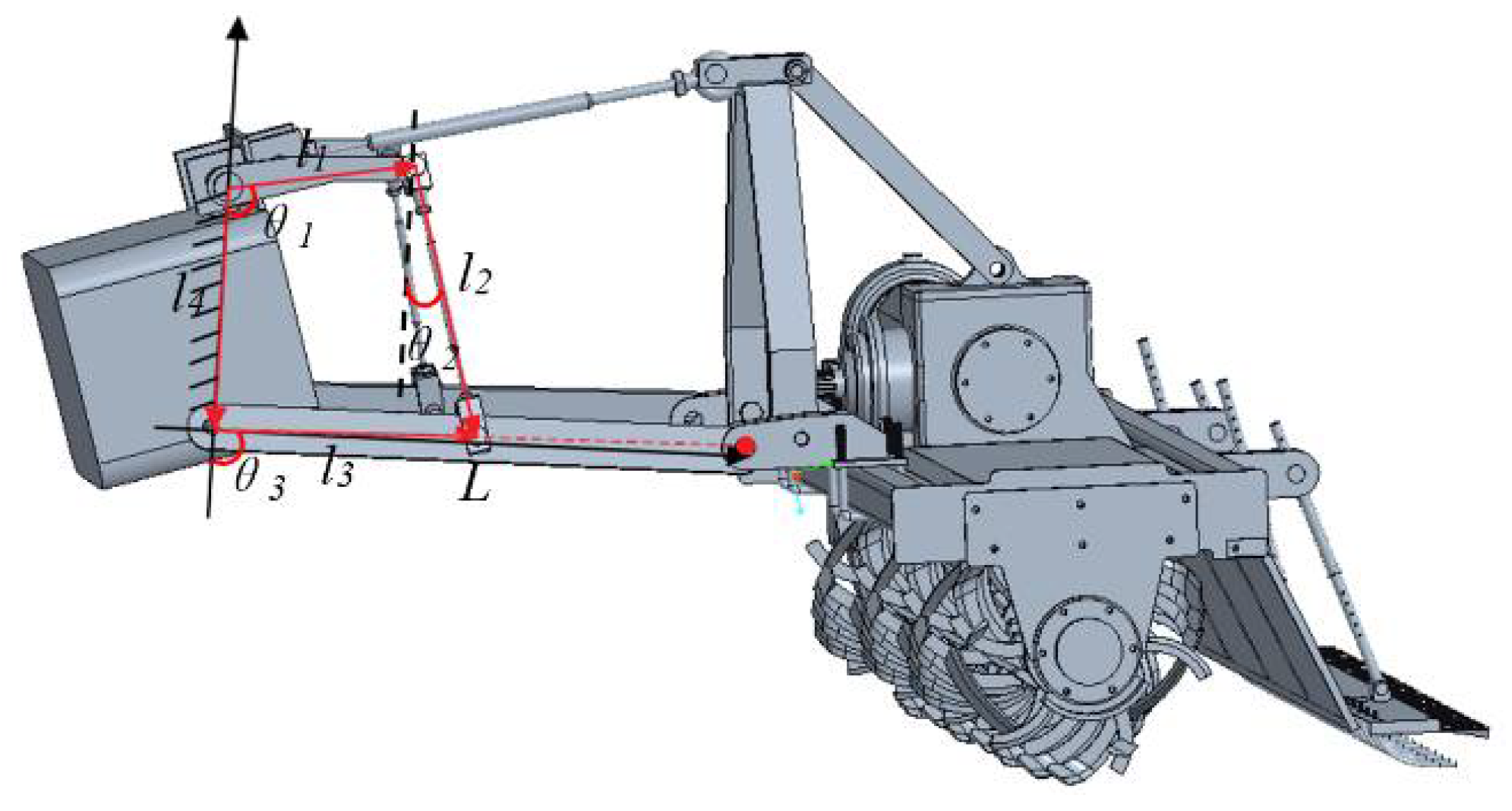
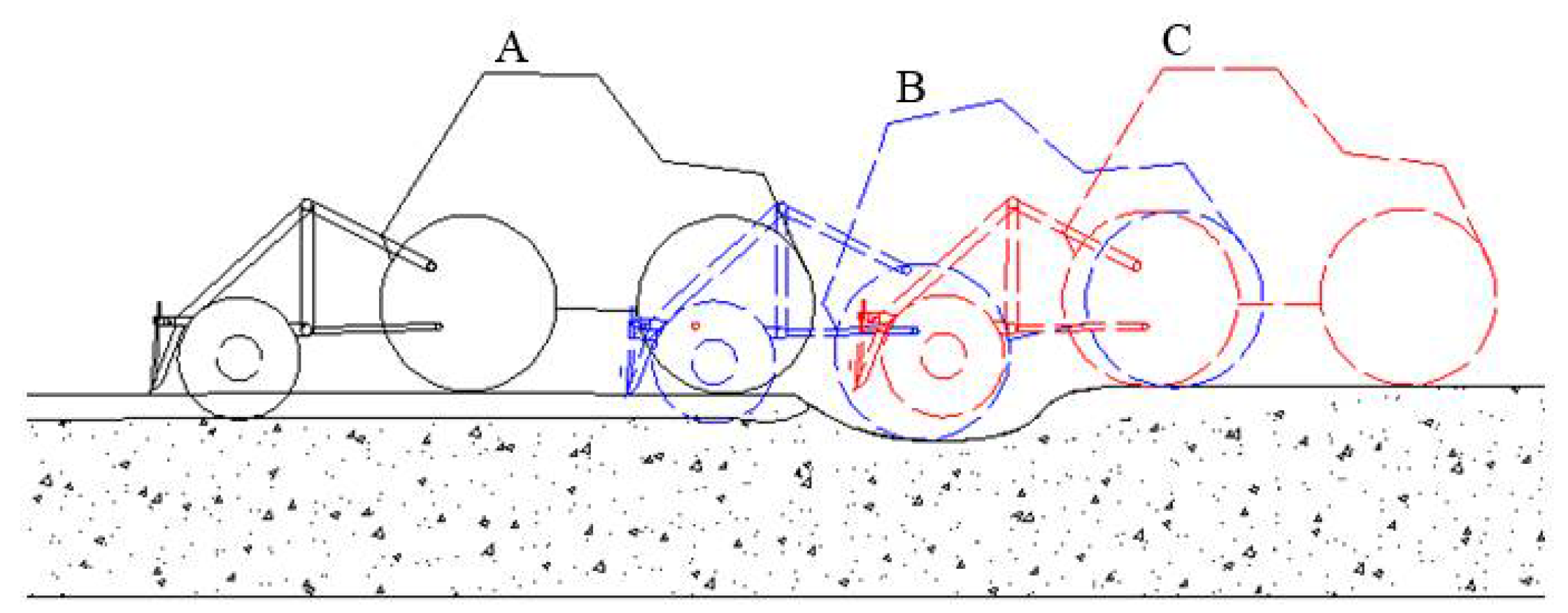
2.2. Kinematic Model of the Depth Control System
2.3. The Design of Controller
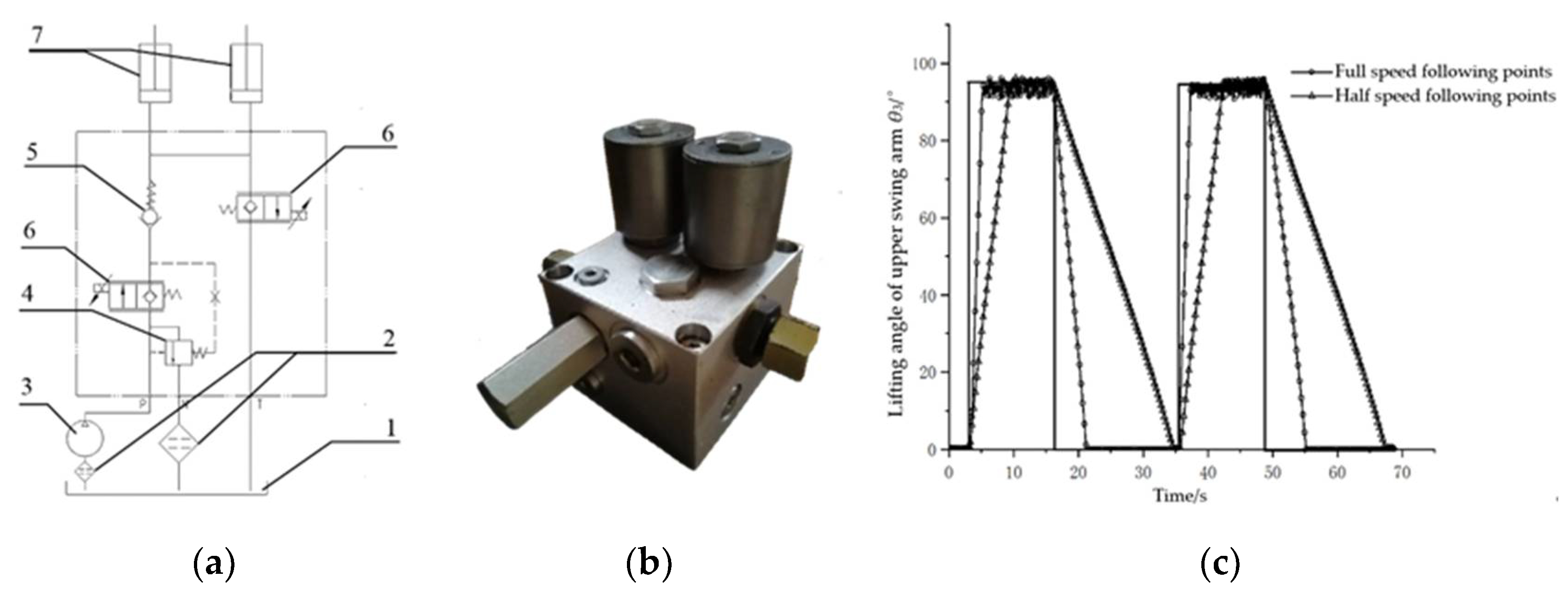
2.3.1. Electronic-Control Proportional Hydraulic Valve
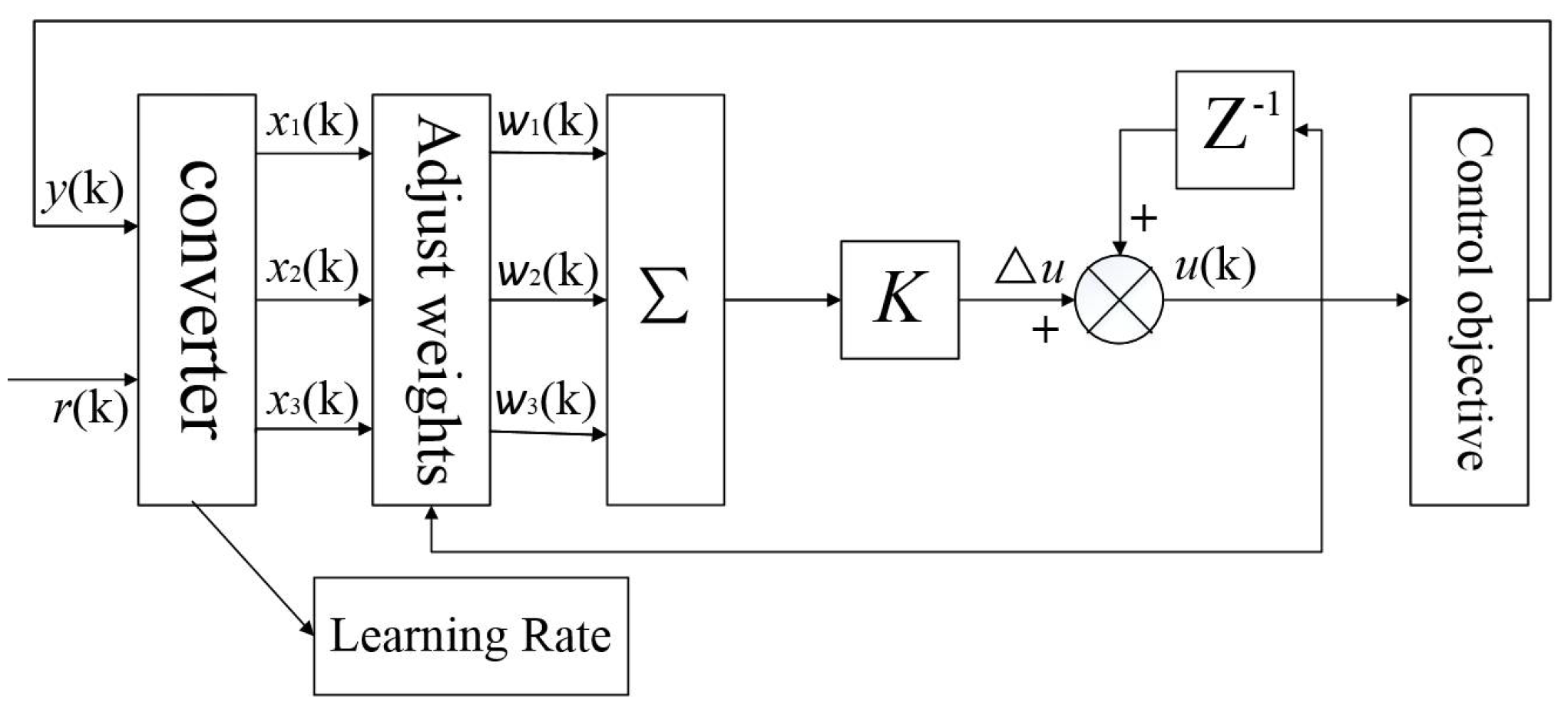
2.3.2. Variable-Gain Single-Neuron PID Controller
3. Results and Discussion
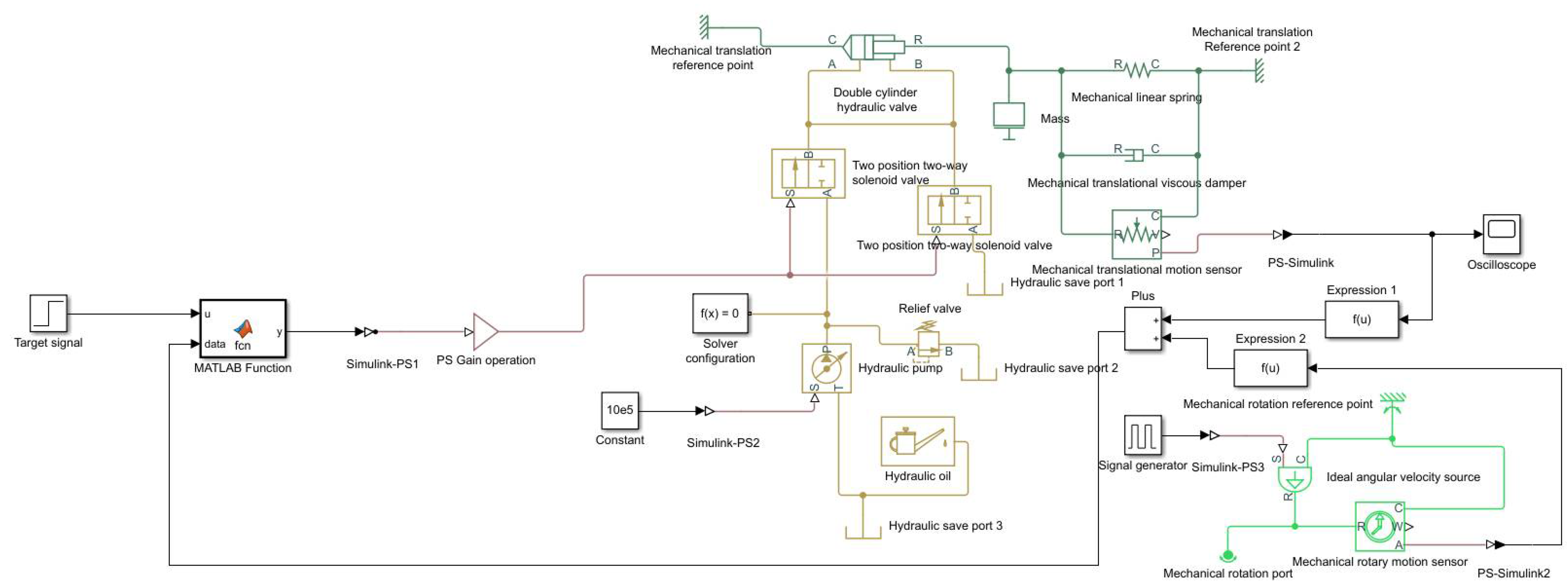
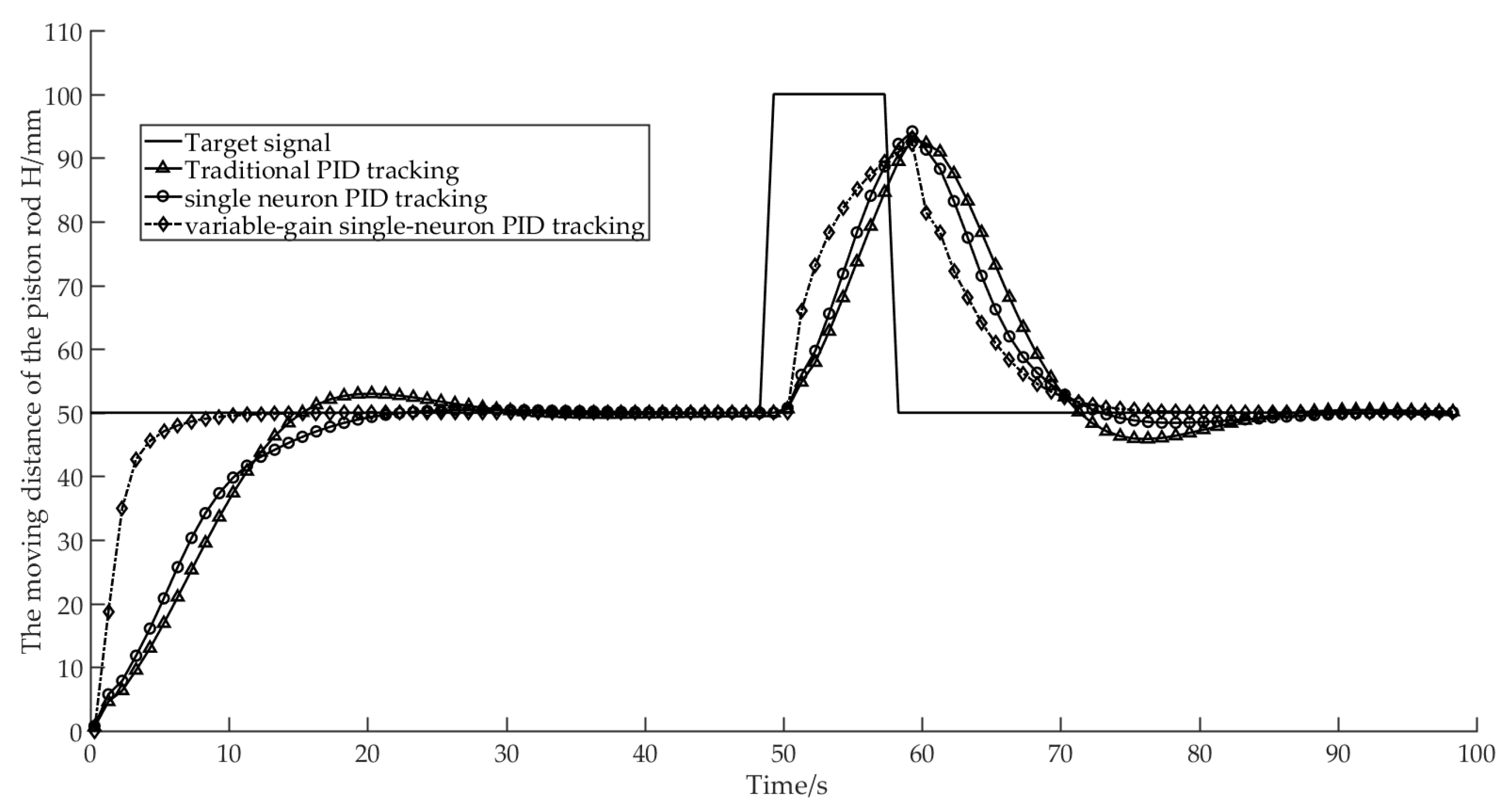
3.1. MATLAB Simulation Analysis
3.2. Field Experiment
- Check the status of the implement to ensure the normal operation of the electric control system and hydraulic system;
- Set the burying depth control algorithm;
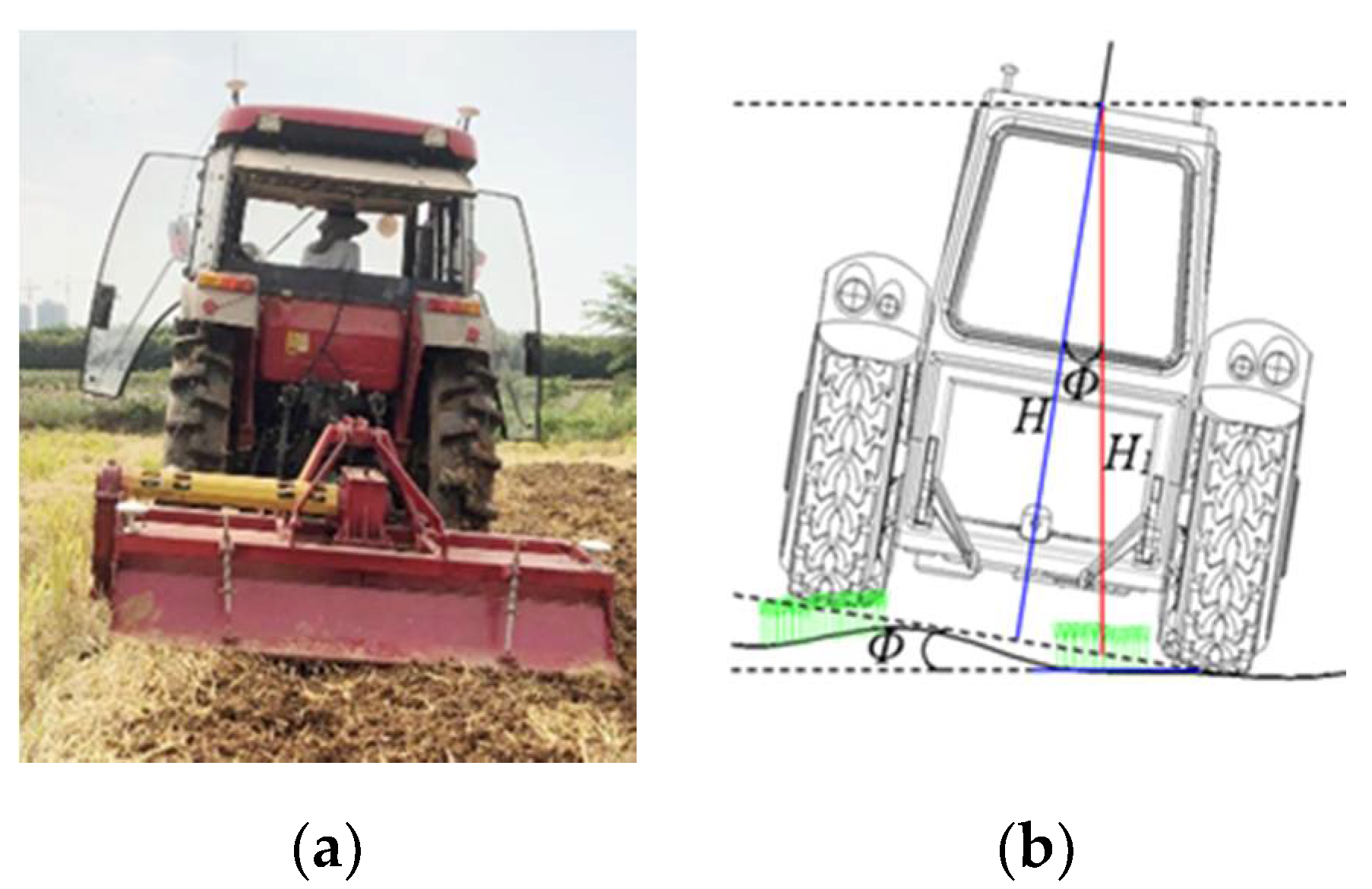
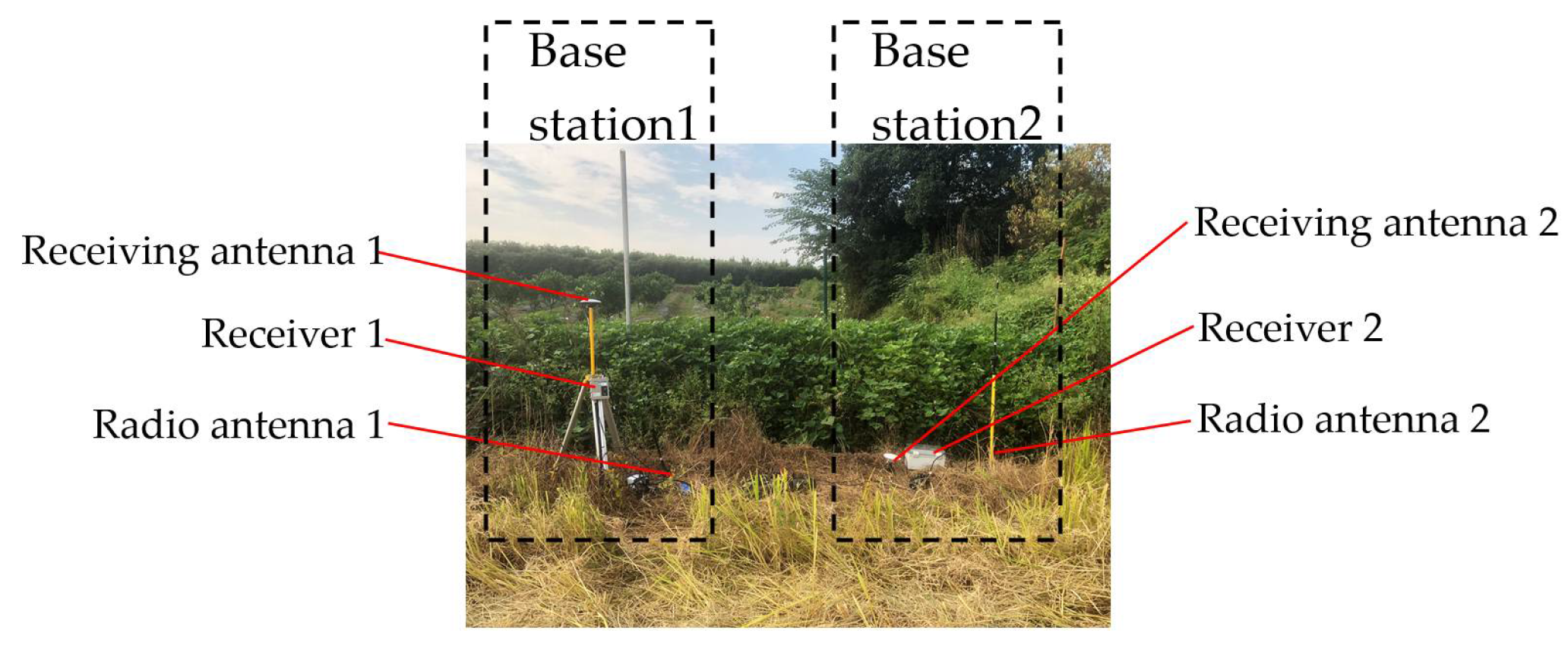
- Set up the RTK-GNSS base station as shown in shown in Figure 11, and set the GNSS positioning coordinate origin and communication port to start the rotary burying depth control system;
- Start the operation;
- Record test data including height changes of the tractor and the rotary tiller; and
- Repeat steps 2 to 5 using three different control algorithms.
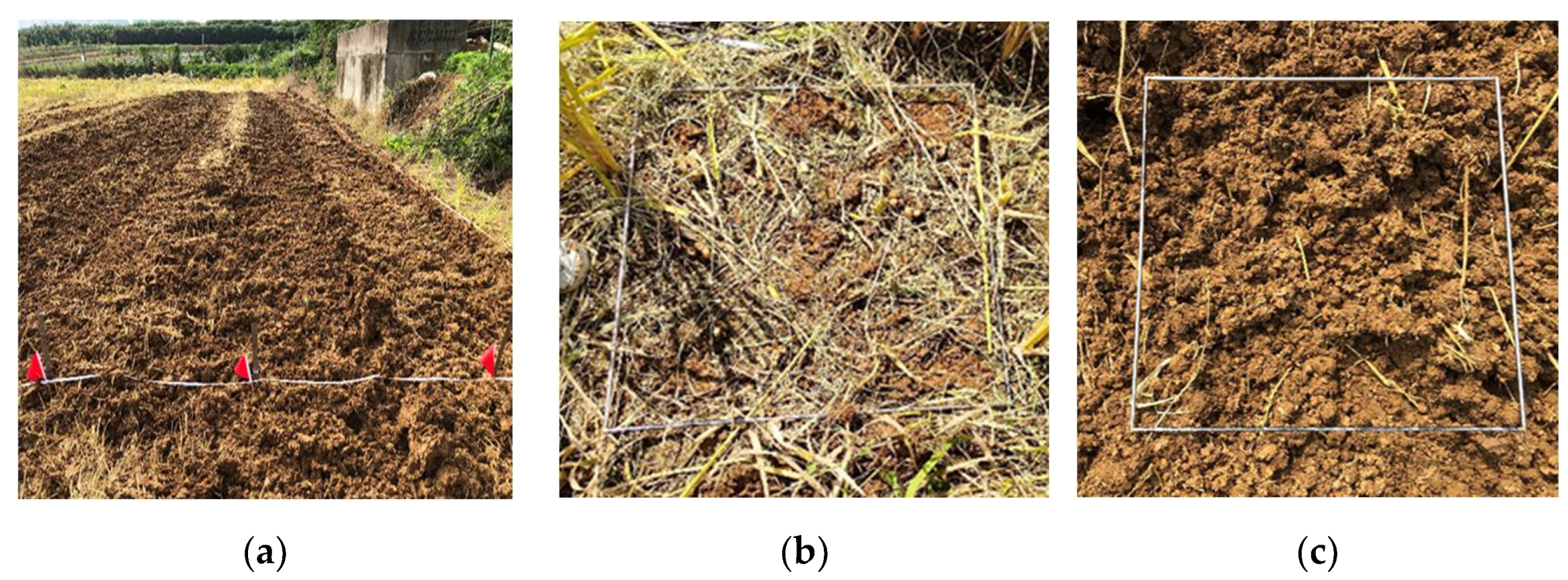
- Tillage depth and stability coefficient of tillage depth
- 2.
- Burying rate of stubbles
4. Conclusions
- (1)
- To solve the problems of slow response speed and inaccurate depth control of the existing rotary burying operation unit, a depth control system based on variable-gain single-neuron PID was designed and implemented. The main instruments of the depth control system included an RTK-GNSS, an electric-control proportional hydraulic valve, an STM32 microcontroller, an on-board computer, an angle sensor, and a rotary tiller for stubble burying.
- (2)
- When the height of the field surface changed, the driver’s experience could not accurately control the depth of the rotary tillage operation, which increased the difficulty of the operation and affected the growth of later crops. A dual antenna RTK-GNSS was used to obtain the real-time surface height and roll angle, and the height changes at the center point of the rotary tiller during the operation. These values are then sent to the variable-gain single-neuron PID control algorithm to obtain the ideal lifting angle of the three-point hitch lifting arm. Finally, the STM32 microcontroller could change the lifting angle of the lift arm in real-time through the electronic-control proportional hydraulic valve.
- (3)
- Simulink simulation results showed that the variable-gain single-neuron PID could alleviate the slow convergence rate and the large overshoot of the conventional PID, improve the adaptability of the scale factor K to increase the response speed of the controller, and improve the adaptability of the rotary burying depth control system to complex field surface conditions.
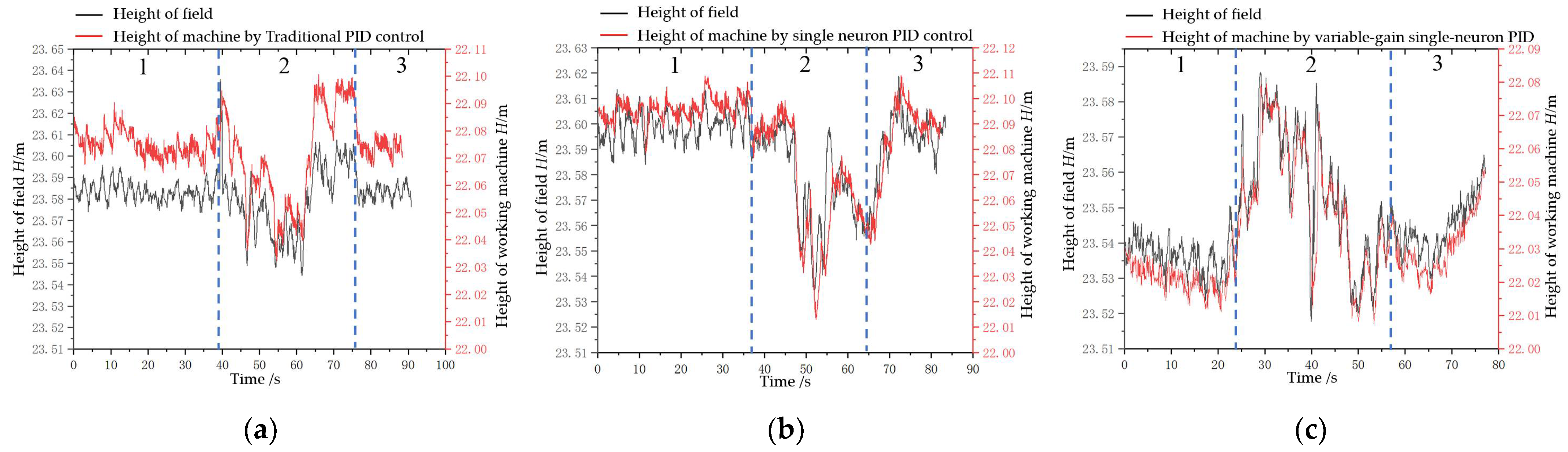
- (4)
- Field experiment results showed that compared to the conventional PID and single-neuron PID control algorithms, the variable-gain single-neuron PID control algorithm adjusted the scale factor K in real-time, making the rotary tiller follow the real-time changes of the field surface better, enhancing the adaptability and robustness of the rotary burying depth control system. When the working speed was 0.61 m/s, the variable-gain single-neuron PID could satisfy the tillage depth requirement. The stability coefficient of the tillage depth was 96.09%, which was higher than that of the conventional PID and single-neuron PID. The straw coverage rate was 94.74%, and the overall rotary burying effect was better than those of the conventional PID and single-neuron PID. The straw rotary burying depth control system designed in this study could improve the stability of the rotary burying operation and could be used for an automatic tractor-rotary tiller stubble burying system under unmanned driving.
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Malhi, S.S.; Nyborg, M.; Solberg, E.D.; Dyck, M.F.; Puurveen, D. Improving crop yield and N uptake with long-term straw retention in two contrasting soil types. Field Crop Res. 2011, 124, 378–391. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhang, J.; Zeng, R.; Zhang, W.; Yang, Q.; Xia, J. Design and experiment of herringbone type rotary blade roller for burying stubble in paddy field and dry land. Trans. CSAM 2019, 50, 49–57. [Google Scholar]
- Jia, H.; Wang, L.; Li, C.; Tan, H.; Ma, C. Combined stalk–stubble breaking and mulching machine. Soil Tillage Res. 2010, 107, 42–48. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, J.; Zhu, Y.; Zhang, C.; Tahir, H.M.; Xia, J. Design and experiment of combined tillage machine for subsoiling and rotary burying of straw incorporated into soil. Trans. CSAE 2017, 33, 17–26. [Google Scholar]
- Cowell, P.A.; Herbert, P.F. The design of a variable geometry linkage to improve depth control of tractor mounted implements. J. Agric. Eng. Res. 1988, 39, 85–97. [Google Scholar] [CrossRef]
- Xia, J.; Zhang, G.; Xu, Q.; Huang, H.; Zhou, Y. Research on The Mechanized Technology of Rotary Tillage and Stubble-Mulch for Paddy Field under Multiple Rice Cropping System. J. Huazhong Agric. Univ. 2008, 2, 331–334. [Google Scholar]
- Zhang, X.; Xia, J.; Zhang, J.; He, X.; Liang, S.; Zhang, S.; Wu, H.; Wan, S. Working performance experiment of combination blade roller for straw returning in paddy field and dry land. Trans. CSAE 2016, 32, 9–15. [Google Scholar]
- Lee, J.; Yamazaki, M.; Oida, A.; Nakashima, H.; Shimizu, H. Electro-hydraulic tillage depth control system for rotary implements mounted on agricultural tractor design and response experiments of control system. J. Terramech. 1998, 35, 229–238. [Google Scholar] [CrossRef]
- Xia, J.; Li, D.; Liu, G.; Cheng, J.; Zheng, K.; Luo, C. Design and test of electro-hydraulic monitoring device for hitch tillage depth based on measurement of tractor pitch angle. Trans. CSAM 2021, 52, 386–395. [Google Scholar]
- Li, Q.; Luo, X.; Wang, M.; Zhao, Z.; Qu, Y.; Liu, G.; Lin, J.; Si, Y. Design of paddy field leveler using tilt sensor. Trans. CSAE 2007, 23, 88–93. [Google Scholar]
- Yao, D.; Liu, C. Research and design of JPD-360 dryland laser grader. J. Agric. Mech. Res. 2017, 39, 85–95. [Google Scholar]
- Hu, L.; Luo, X.; Lin, C.; Yang, W.; Xu, Y.; Li, Q. Development of 1PJ-4.0 laser leveler installed on a wheeled tractor for paddy field. Trans. CSAM 2014, 45, 146–151. [Google Scholar]
- Marucci, A.; Colantoni, A.; Zambon, I.; Egidi, G. Precision Farming in Hilly Areas: The Use of Network RTK in GNSS Technology. Agriculture 2017, 7, 60. [Google Scholar] [CrossRef] [Green Version]
- Heiß, A.; Paraforos, D.; Griepentrog, H. Determination of Cultivated Area, Field Boundary and Overlapping for A Plowing Operation Using ISO 11783 Communication and D-GNSS Position Data. Agriculture 2019, 9, 38. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Kang, X.; Xia, Y.; Jing, Y. Global path planning method and experiment based on GNSS farmland leveling. Trans. CSAM 2018, 49, 27–33. [Google Scholar]
- Neményi, M.; Mesterházi, P.; Pecze, Z.; Stépán, Z. The role of gis and gps in precision farming. Comput. Electron. Agric. 2003, 39, 45–55. [Google Scholar] [CrossRef]
- Hobbs, J.; Hesse, H. Electronic/Hydraulic Hitch Control for Agricultural Tractors. SAE Trans. 1980, 89, 3211–3219. [Google Scholar]
- Dell’Acqua, R.; Dell’Orto, G.; Guagliumi, R.; Amedei, G.; Cevolini, A. Agricultural Vehicle Electronics—A New Hitch Control; SAE Technical Paper 860479; SAE International: Warrendale, PA, USA, 1986. [Google Scholar] [CrossRef]
- Kovacev, I.; Kosutic, S.; Jejcic, V.; Copec, K.; Pliestic, S. Impact of Electronic-Hydraulic Hitch Control on Rational Exploitation of Tractor in Ploughing. STROJARSTVO 2008, 50, 287–294. [Google Scholar]
- Du, Q.; Chen, X. Design on Control System for Electro-Hydraulic Hitch Equipment of Tractor. Adv. Mater. Res. 2014, 945, 1513–1516. [Google Scholar] [CrossRef]
- Jin, X.; Chen, K.; Zhao, Y.; Ji, J.; Jing, P. Simulation of hydraulic transplanting robot control system based on fuzzy PID controller. Measurement 2020, 164, 108023. [Google Scholar] [CrossRef]
- Cai, S.; Becherif, M.; Wack, M. Wireless control of automotive actuator based on PID and Fuzzy Logic. IFAC 2011, 44, 9745–9750. [Google Scholar] [CrossRef]
- Petrov, M.; Proychev, T.; Topalov, A. Expert PID Controller with Fuzzy Self-Tuning. IFAC 1995, 28, 367–372. [Google Scholar] [CrossRef]
- Chang, W.D.; Hwang, R.C.; Hsieh, J.G. A multivariable on-line adaptive PID controller using auto-tuning neurons. Eng. Appl. Artif. Intell. 2003, 16, 57–63. [Google Scholar] [CrossRef]
- Ladjouzi, S.; Grouni, S. PID controller parameters adjustment using a single memory neuron. J. Franklin Inst. 2020, 357, 5143–5172. [Google Scholar] [CrossRef]
- Zhu, S.; Zhang, C. The simulation research on PID controller of tractor electric—Hydraulic hitch system. Manuf. Inf. Eng. Chin. 2008, 37, 49–53. [Google Scholar]
- Anthonis, J.; Mouazen, A.M.; Saeys, W.; Ramon, H. An automatic depth control system for online measurement of spatial variation in soil compaction, part 3: Design of depth control system. Biosyst. Eng. 2004, 89, 59–67. [Google Scholar] [CrossRef]
- Shafaei, S.M.; Loghavi, M.; Kamgar, S. A practical effort to equip tractor-implement with fuzzy depth and draft control system. Eng. Agric. Envir. Food. 2019, 12, 191–203. [Google Scholar] [CrossRef]
- Han, J.; Xia, C.; Shang, G.; Gao, X. In-field experiment of electro-hydraulic tillage depth draft-position mixed control on tractor. IOP Conf. 2017, 274, 012028. [Google Scholar] [CrossRef]
- Xi, X. Research on Force-Position Combined Control for Tractor Hydraulic Hitch System Based on CAN Bus. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2011. [Google Scholar]
- Xi, X.; Lu, Z.; Li, H.; Li, X.; Guo, B. Simulation and analysis of force-position comprehensive coefficient. J. Agric. Mech. Res. 2012, 34, 62–68. [Google Scholar]
- He, J.; Luo, X.; Zhang, Z.; Wang, P.; Zhu, Q. Positioning correction method for rice transplanters based on the attitude of the implement. Comput. Electron. Agric. 2020, 176, 105598. [Google Scholar] [CrossRef]
- Zhou, M.; Xia, J.; Zheng, K.; Du, J.; Zhang, J.; Luo, C. Development of rotary straw burying and returning navigation system based on variable-gain single-neuron PID. Trans. CSAE 2021, 37, 31–40. [Google Scholar]
- Ding, Y.; Xia, Z.; Peng, J. Design and experiment of the single-neuron PID navigation controller for a combine harvester. Trans. CSAE 2020, 36, 34–42. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Overall dimensions/(mm × mm × mm) | 1345 × 2500 × 1300 |
| Overall weight/kg | 750 |
| Working width/mm | 2300 |
| Rotary burying depth/mm | 120~180 |
| Matching power/kW | ≥65 |
| Rotary knives | 54 |
| Helical cross knives | 18 |
| Machetes | 36 |
| Index | Value | |
|---|---|---|
| Stubble height/cm | 58 | |
| Stubble coverage/g.m−2 | 1273 | |
| Soil firmness/kPa | 1528 | |
| Soil moisture content/% | 36.40 | |
| Particle size distribution/% | (0, 0.002] mm | 42.03 |
| (0.002, 0.05] mm | 55.06 | |
| (0.05, 2] mm | 2.91 | |
| Algorithm | Average Depth of Rotary Burying/cm | Stability Coefficient of Rotary Burying Depth/% | Burying Rate of Stubble/% |
|---|---|---|---|
| Conventional PID | 15.05 | 90.24 | 90.36 |
| Single neuron PID | 15.23 | 91.72 | 91.25 |
| Variable-gain single-neuron PID | 15.49 | 96.09 | 94.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, M.; Xia, J.; Zhang, S.; Hu, M.; Liu, Z.; Liu, G.; Luo, C. Development of a Depth Control System Based on Variable-Gain Single-Neuron PID for Rotary Burying of Stubbles. Agriculture 2022, 12, 30. https://doi.org/10.3390/agriculture12010030
Zhou M, Xia J, Zhang S, Hu M, Liu Z, Liu G, Luo C. Development of a Depth Control System Based on Variable-Gain Single-Neuron PID for Rotary Burying of Stubbles. Agriculture. 2022; 12(1):30. https://doi.org/10.3390/agriculture12010030
Chicago/Turabian StyleZhou, Mingkuan, Junfang Xia, Shuai Zhang, Mengjie Hu, Zhengyuan Liu, Guoyang Liu, and Chengming Luo. 2022. "Development of a Depth Control System Based on Variable-Gain Single-Neuron PID for Rotary Burying of Stubbles" Agriculture 12, no. 1: 30. https://doi.org/10.3390/agriculture12010030
APA StyleZhou, M., Xia, J., Zhang, S., Hu, M., Liu, Z., Liu, G., & Luo, C. (2022). Development of a Depth Control System Based on Variable-Gain Single-Neuron PID for Rotary Burying of Stubbles. Agriculture, 12(1), 30. https://doi.org/10.3390/agriculture12010030