
Behavior Trajectory Tracking of Piglets Based on DLC-KPCA

Abstract
:1. Introduction
2. Materials and Methods
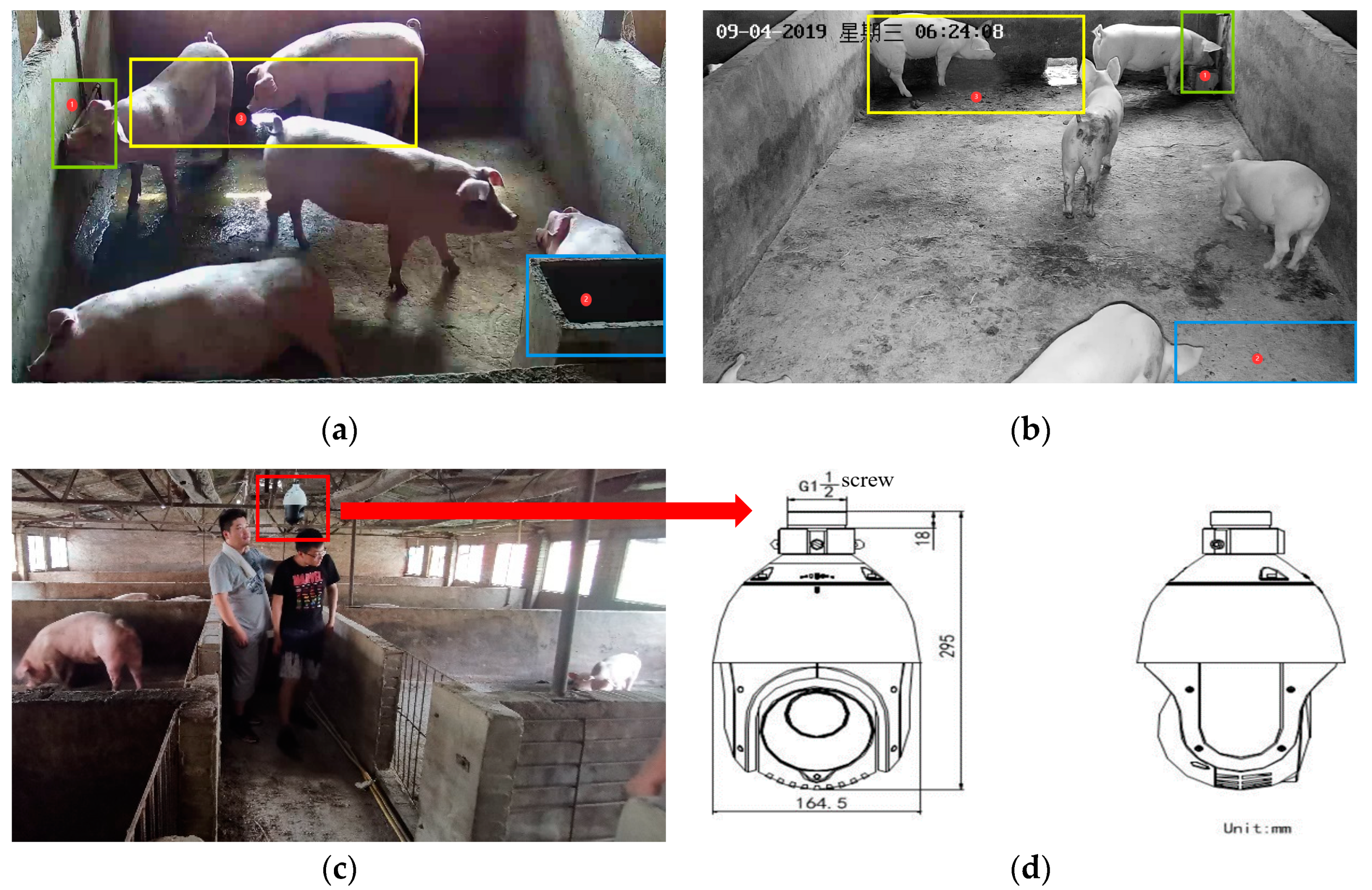
2.1. Subject and Environment
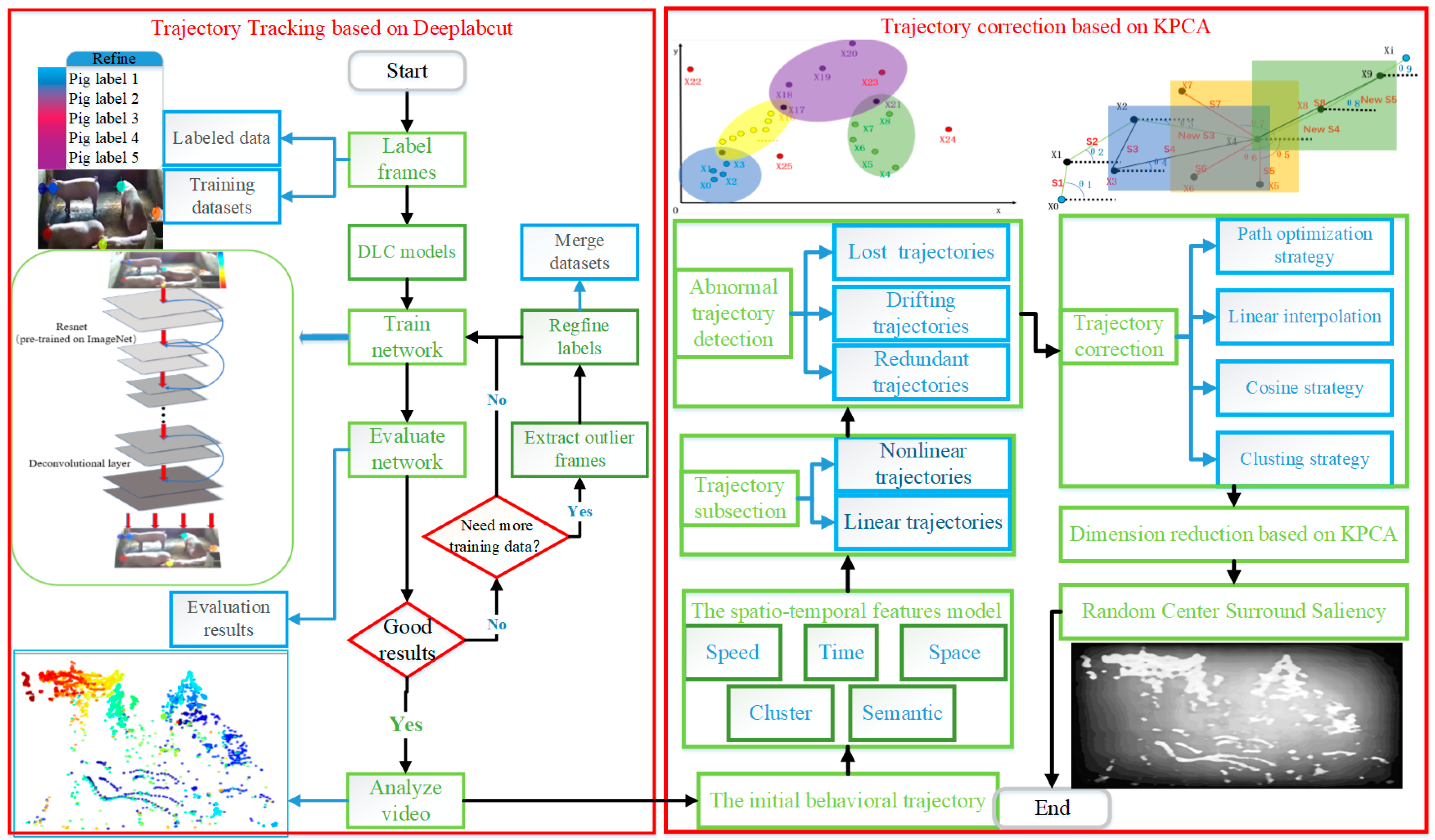
2.2. Behavior Trajectory Tracking Model Based on DLC
2.3. Behavior Trajectory Correcting Model Based on KPCA
2.3.1. Linear Trajectory Correction Strategy
2.3.2. Nonlinear Trajectory Correction Strategy
2.3.3. Trajectory Correction Model
3. Results
3.1. Behavior Trajectory Tracking Results
3.2. Behavior Trajectory Classification Results
3.3. Activity Area Analysis
4. Discussion
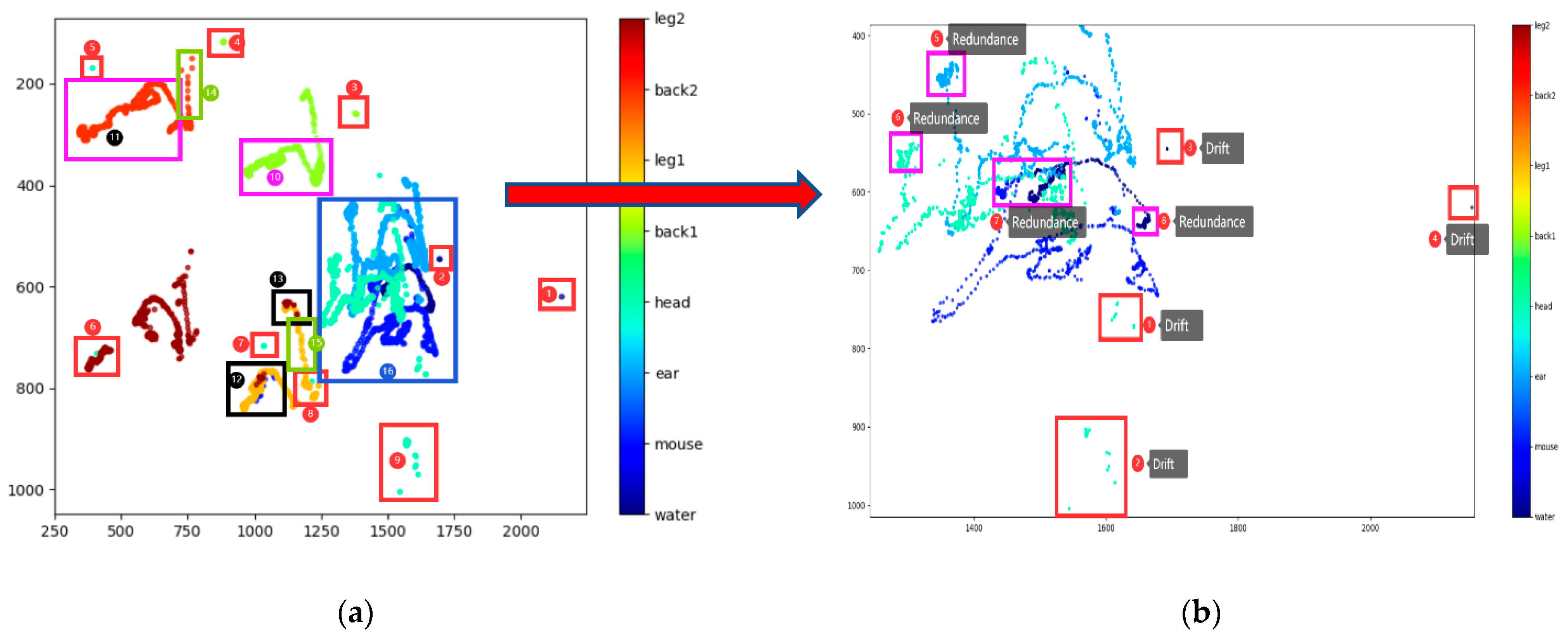
4.1. Abnormal Trajectory Detection Based on Spatiotemporal Characteristics
4.2. Sparse Representation and Correction of Trajectory Based on KPCA
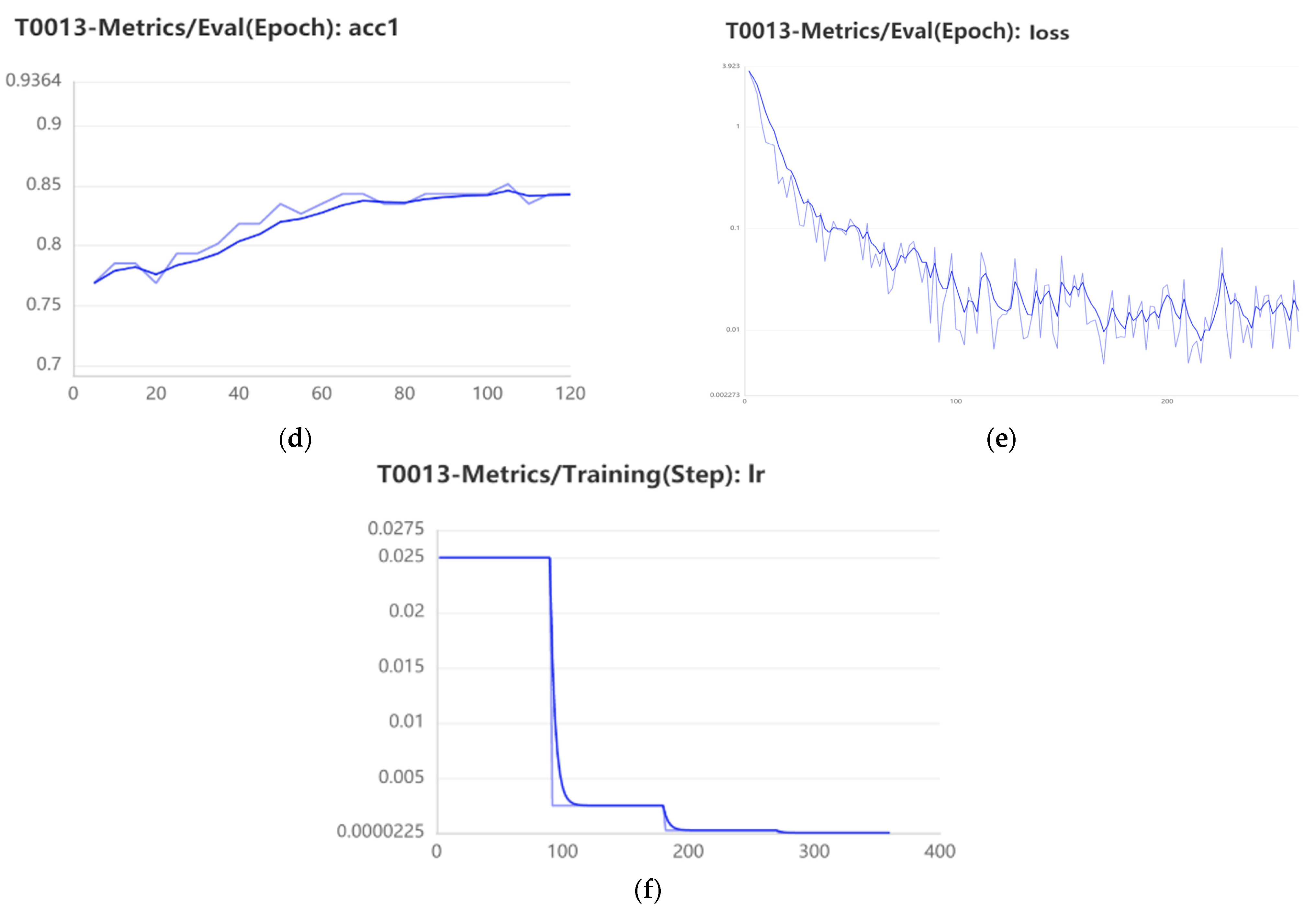
4.3. Performance Analysis of Improved DLC
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Andersen, M.L.; Kongsted, A.G.; Jakobsen, M. Pig elimination behavior: A review. Appl. Anim. Behav. Sci. 2020, 222, 104888. [Google Scholar] [CrossRef]
- Guo, Y.G.; Lian, X.M.; Yan, P.S. Diurnal rhythms, locations and behavioural sequences associated with eliminative behaviours in fattening pigs. Appl. Anim. Behav. Sci. 2015, 168, 18–23. [Google Scholar] [CrossRef]
- Nasirahmadi, A.; Hensel, O.; Edwards, S.A.; Sturm, B. Automatic detection of mounting behaviours among pigs using image analysis. Comput. Electron. Agric. 2016, 124, 295–302. [Google Scholar] [CrossRef] [Green Version]
- Jackson, P.; Nasirahmadi, A.; Guy, J.H.; Bull, S.; Avery, P.J.; Edwards, S.A.; Sturm, B. Using CFD modelling to relate pig lying locations to environmental variability in finishing pens. Sustainability 2020, 12, 1928. [Google Scholar] [CrossRef] [Green Version]
- Larsen, M.L.V.; Bertelsen, M.; Pedersen, L.J. How do stocking density and straw provision affect fouling in conventionally housed slaughter pigs? Livest. Sci. 2017, 205, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Opderbeck, S.; Keler, B.; Gordillo, W.; Schrade, H.; Piepho, H.P.; Gallmann, E. Influence of increased light intensity on the acceptance of a solid lying area and a slatted elimination area in fattening pigs. Agriculture 2020, 10, 56. [Google Scholar]
- Wang, H.; Zeng, Y.Q.; Pu, S.H.; Yang, F.Y. Impact of slatted floor configuration on manure drainage and growth performance of finishing pigs. Appl. Eng. Agric. 2020, 36, 89–94. [Google Scholar] [CrossRef]
- Ocepek, M.; Goold, C.M.; Busančić, M.; Aarnink, A.J.A. Drinker position influences the cleanness of the lying area of pigs in a welfare-friendly housing facility. Appl. Anim. Behav. Sci. 2017, 198, 44–51. [Google Scholar] [CrossRef]
- Larsen, M.; Pedersen, L.J.; Edwards, S.; Albanie, S.; Dawkins, M.S. Movement change detected by optical flow precedes, but does not predict, tail-biting in pigs. Livest. Sci. 2020, 240, 104136. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, W.; Liu, D.; Steibel, J.; Norton, T. Detection of aggressive behaviours in pigs using a Real Sence depth sensor. Comput. Electron. Agric. 2019, 166, 105003. [Google Scholar]
- Buijs, S.; Muns, R. A review of the effects of non-straw enrichment on tail biting in pigs. Animals 2019, 9, 824. [Google Scholar] [CrossRef] [Green Version]
- Nasirahmadi, A.; Hensel, O.; Edwards, S.A.; Sturm, B. A new approach for categorizing pig lying behaviour based on a delaunay triangulation method. Animal 2017, 11, 131–139. [Google Scholar] [CrossRef] [Green Version]
- Vanheukelom, V.; Driessen, B.; Geers, R. The effects of environmental enrichment on the behaviour of suckling piglets and lactating sows: A review. Livest. Sci. 2012, 143, 116–131. [Google Scholar] [CrossRef]
- Han, S.Q.; Zhang, J.H.; Kong, F.T.; Zhang, T.; Wu, H.; Shan, J.; Wu, J. Group-housed pigs image segmentation method by recognizing watershed ridge lines on boundary. Trans. CSAE 2019, 35, 161–168. [Google Scholar]
- Kashiha, M.; Bahr, C.; Ott, S.; Moons, C.P.H.; Niewold, T.A.; Odberg, F.O.; Berckmans, D. Automatic identification of marked pigs in a pen using image pattern recognition. Comput. Electron. Agric. 2013, 93, 111–120. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, B.; Liao, H.M. Recognition method for aggressive behavior of group pigs based on deep learning. Trans. CSAE 2019, 35, 192–200. [Google Scholar]
- Yang, Q.M.; Xiao, D.Q.; Zhang, G. Pig drinking behavior recognition based on machine vision. Trans. CSAM 2018, 49, 232–238. [Google Scholar]
- Vermeer, H.M.; Altena, H.; Vereijken, P.F.G.; Bracke, M.B.M. Rooting area and drinker affect dunging behaviour of organic pigs. Appl. Anim. Behav. Sci. 2015, 165, 66–71. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Yu, H.A.; Lei, M.G. Trajectory tracking for group housed pigs based on locations of head/tail. Trans. CSAE 2017, 33, 220–226. [Google Scholar]
- Kashiha, M.A.; Bahr, C.; Ott, S.; Moons, C.P.H.; Niewold, T.A.; Tuyttens, F.; Berckmans, D. Automatic monitoring of pig locomotion using image analysis. Livest. Sci. 2014, 159, 141–148. [Google Scholar] [CrossRef]
- Zheng, C.; Zhu, X.M.; Yang, X.F.; Wang, L.; Tu, S.Q.; Xue, Y.J. Automatic recognition of lactating sow postures from depth images by deep learning detector. Comput. Electron. Agric. 2018, 147, 51–63. [Google Scholar] [CrossRef]
- Mathis, A.; Mamidanna, P.; Cury, K.M.; Abe, T.; Murthy, V.N.; Mathis, M.W.; Bethge, M. DeepLabCut: Markerless pose estimation of user-defined body parts with deep learning. Nat. Neurosci. 2018, 21, 1281–1289. [Google Scholar] [CrossRef]
- Nath, T.; Mathis, A.; Chen, A.C.; Patel, A.; Bethge, M.; Mathis, M.W. Using DeepLabCut for 3D markerless pose estimation across species and behaviors. Nat. Protoc. 2019, 14, 2152–2176. [Google Scholar] [CrossRef] [PubMed]
- Alameer, A.; Kyriazakis, I.; Bacardit, J. Automated recognition of postures and drinking behaviour for the detection of compromised health in pigs. Sci. Rep. 2020, 10, 13665. [Google Scholar] [CrossRef]
- Fang, C.; Zhang, T.M.; Zheng, H.K.; Huang, J.D.; Cuan, K.X. Pose estimation and behavior classifcation of broiler chickens based on deep neural networks. Comput. Electron. Agric. 2021, 180, 105863. [Google Scholar] [CrossRef]
- Zheng, Y. Trajectory Data Mining: An Overview. ACM Trans. Intell. Syst. Technol. 2015, 6, 1–41. [Google Scholar] [CrossRef]
- Sun, H.B.; Tong, Z.Y.; Tang, S.F.; Tong, M.M.; Ji, Y.M. SLAM research based on Kalman filter and particle filter. Softw. Guide 2018, 17, 1–3. [Google Scholar]
- Li, N.; Jin, H.H. Anomalous trajectory detection in terminal area based on multidimensional trajectory features. Sci. Technol. Eng. 2019, 19, 382–387. [Google Scholar]
- Yin, C.; Zhang, S.; Wang, J.; Xiong, N.N. Anomaly detection based on convolutional recurrent autoencoder for IoT time series. IEEE Trans. Syst. Man Cybern. Syst. 2020, 1–11. [Google Scholar] [CrossRef]
- Zheng, K.; Zheng, Y.; Yuan, N.J.; Shang, S. On discovery of gathering patterns from trajectories. In Proceedings of the IEEE International Conference on Data Engineering, Brisbane, Australia, 8–12 April 2013. [Google Scholar]
- He, Q.; Chen, Y.; Dong, Q.B.; Wang, Y.B. Mining moving object gathering pattern based on Resilient Distributed Datasets and R-tree index-ScienceDirect. Neurocomputing 2020, 393, 194–202. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, P.; Lang, X.; Miao, A. Improved dynamic kernel principal component analysis for fault detection. Measurement 2020, 158, 107738. [Google Scholar] [CrossRef]



 ” to identify the main parts of the piglet, such as its eye, snout, ear, and leg, and the tracking results are marked as “
” to identify the main parts of the piglet, such as its eye, snout, ear, and leg, and the tracking results are marked as “  ”; (b) represents the video trajectory tracking results.
” to identify the main parts of the piglet, such as its eye, snout, ear, and leg, and the tracking results are marked as “ ”; (b) represents the video trajectory tracking results.
”; (b) represents the video trajectory tracking results.
” to identify the main parts of the piglet, such as its eye, snout, ear, and leg, and the tracking results are marked as “ ”; (b) represents the video trajectory tracking results.



 ” is a manual marker, and “
” is a manual marker, and “  ” represents the tracking results after training. (a) Tracking results of 7 targets; (b) tracking results of 28 targets.
” is a manual marker, and “ ” represents the tracking results after training. (a) Tracking results of 7 targets; (b) tracking results of 28 targets.
” represents the tracking results after training. (a) Tracking results of 7 targets; (b) tracking results of 28 targets.
” is a manual marker, and “ ” represents the tracking results after training. (a) Tracking results of 7 targets; (b) tracking results of 28 targets.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| p | 0.7 | 0.75 | 0.8 | 0.85 | 0.9 | 0.95 |
|---|---|---|---|---|---|---|
| Original trajectory data dimensions | 1000 | 1000 | 1000 | 1000 | 1000 | 1000 |
| Number of principal components | 30 | 30 | 50 | 60 | 80 | 140 |
| Number of abnormal trajectories | 290 | 300 | 310 | 270 | 240 | 250 |
| ω | 2 | 4 | 6 | 8 | 10 | 12 |
|---|---|---|---|---|---|---|
| Original trajectory data dimensions | 1000 | 1000 | 1000 | 1000 | 1000 | 1000 |
| Number of principal components | 289 | 106 | 97 | 63 | 40 | 28 |
| Number of abnormal trajectories | 84 | 83 | 86 | 88 | 93 | 92 |
| v | 0.02 | 0.04 | 0.06 | 0.08 | 0.10 |
|---|---|---|---|---|---|
| Original trajectory data dimensions | 1000 | 1000 | 1000 | 1000 | 1000 |
| Number of principal components | 50 | 50 | 50 | 50 | 50 |
| Number of abnormal trajectories | 63 | 99 | 106 | 270 | 323 |
| Methods | The Total Number | The Normal Number | The Drifting Number | The Frequency | The Average Amplitude |
|---|---|---|---|---|---|
| DLC | 1000 | 826 | 174 | 17.4% | 50 (px) |
| DLC-KPCA | 1000 | 922 | 78 | 7.8% | 15 (px) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Zhou, H.; Cao, J.; Guo, X.; Su, J.; Wang, L.; Lu, S.; Li, L. Behavior Trajectory Tracking of Piglets Based on DLC-KPCA. Agriculture 2021, 11, 843. https://doi.org/10.3390/agriculture11090843
Liu C, Zhou H, Cao J, Guo X, Su J, Wang L, Lu S, Li L. Behavior Trajectory Tracking of Piglets Based on DLC-KPCA. Agriculture. 2021; 11(9):843. https://doi.org/10.3390/agriculture11090843
Chicago/Turabian StyleLiu, Chengqi, Han Zhou, Jing Cao, Xuchao Guo, Jie Su, Longhe Wang, Shuhan Lu, and Lin Li. 2021. "Behavior Trajectory Tracking of Piglets Based on DLC-KPCA" Agriculture 11, no. 9: 843. https://doi.org/10.3390/agriculture11090843
APA StyleLiu, C., Zhou, H., Cao, J., Guo, X., Su, J., Wang, L., Lu, S., & Li, L. (2021). Behavior Trajectory Tracking of Piglets Based on DLC-KPCA. Agriculture, 11(9), 843. https://doi.org/10.3390/agriculture11090843