
Impact of the Parameters of Spraying with a Small Unmanned Aerial Vehicle on the Distribution of Liquid on Young Cherry Trees


Abstract
:1. Introduction
2. Materials and Methods
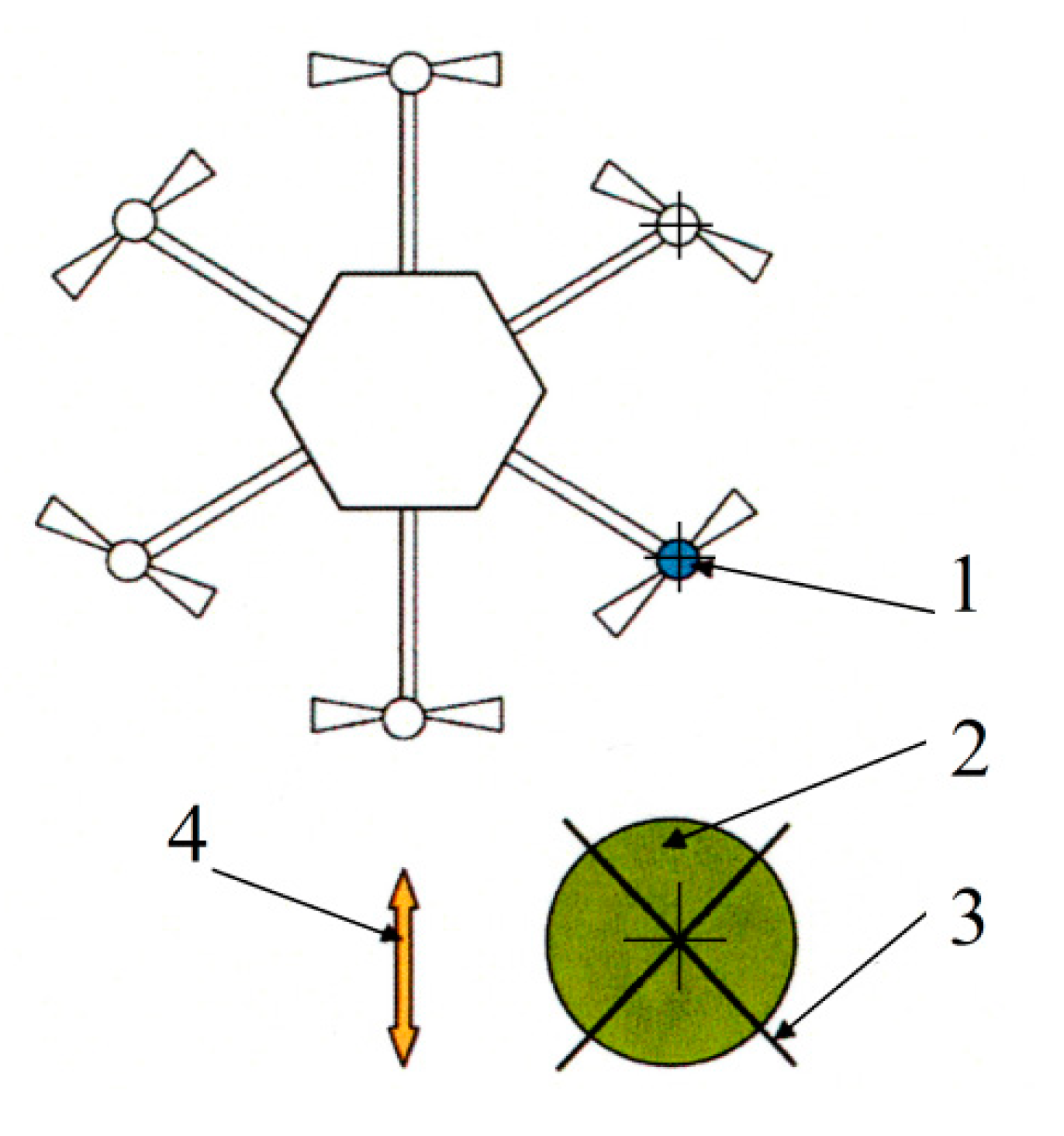
2.1. Test Stand
2.2. Liquid Distribution Measurements
2.3. Evaluation of Liquid Stream
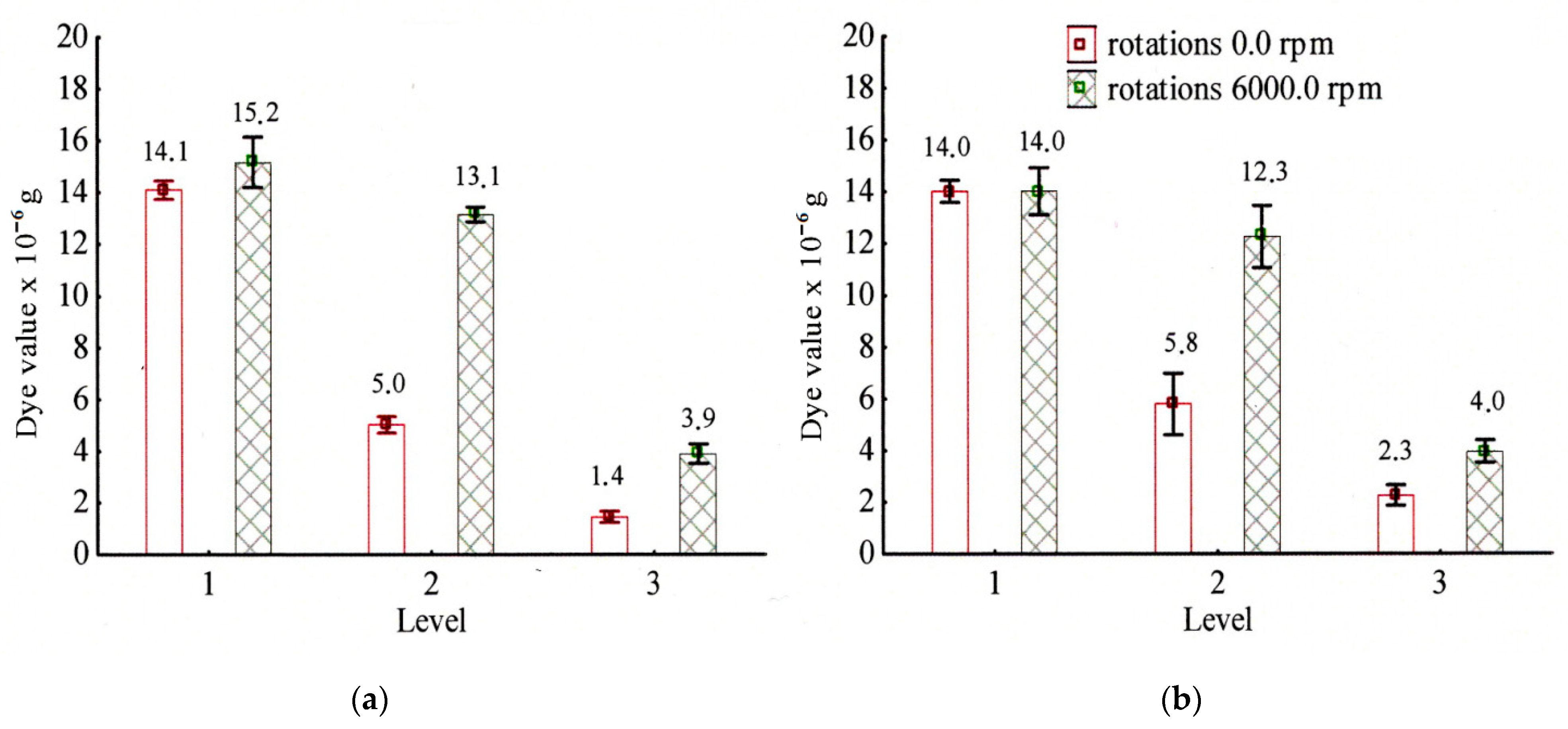
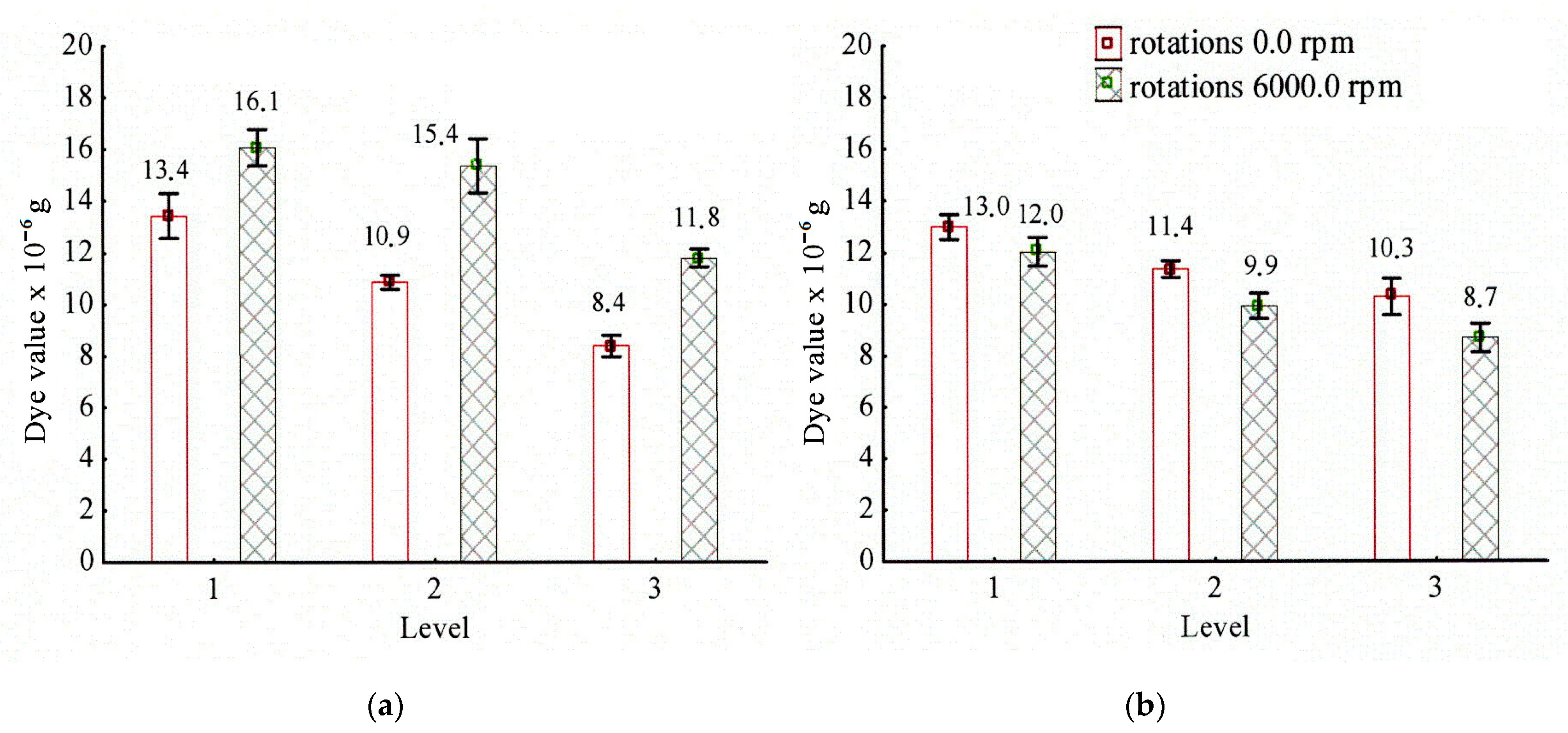
3. Results
- -
- for air-injector flat spray nozzlematching coefficient R2 = 0.0904, significance factor p = 0.0747;CV = 0.3119 − 0.0009 x
- -
- for air-injector twin flat spray nozzlematching coefficient R2 = 0.1789, significance factor p = 0.0102.CV = 0.3804 − 0.0013 x
- -
- for air-injector flat spray nozzle significance factor p = 0.4829;
- -
- for air-injector twin flat spray nozzle significance factor p = 0.4198;
4. Conclusions
Author Contributions
Funding
 grant number PPN/BIL/2018/1/00072, research was also funded by KOSZALIN UNIVERSITY OF TECHNOLOGY.
grant number PPN/BIL/2018/1/00072, research was also funded by KOSZALIN UNIVERSITY OF TECHNOLOGY.Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Primicerio, J.; Di Gennaro, S.F.; Fiorillo, E.; Genesio, L.; Lugato, E.; Matese, A.; Vaccari, F.P. A flexible unmanned aerial vehicle for precision agriculture. Precis. Agric. 2012, 13, 517–523. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.C.; Chiang, Y.C.; Weng, P.Y. Imaging Using Unmanned Aerial Vehicles for Agriculture Land Use Classification. Agriculture 2020, 10, 416. [Google Scholar] [CrossRef]
- Mogili, U.M.R.; Deepak, B.B.V.L. Review on Application of Drone Systems in Precision Agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Giles, D.K.; Billing, R.C. Deployment and Performance of a UAV for Crop Spraying. Chem. Eng. Trans. 2015, 44, 307–312. [Google Scholar] [CrossRef]
- Huang, Y.; Hoffmann, W.C.; Lan, Y.; Wu, W.; Fritz, B.K.; Thomson, S.J. Development of a Spray System for an Unmanned Aerial Vehicle Platform. Appl. Eng. Agric. 2009, 25, 803–809. [Google Scholar] [CrossRef]
- Iost Filho, F.H.; Heldens, W.B.; Kong, Z.; de Lange, E.S. Drones: Innovative Technology for Use in Precision Pest Management. J. Econ. Entomol. 2020, 113, 1–25. [Google Scholar] [CrossRef] [Green Version]
- He, X.K.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar] [CrossRef]
- Yang, S.; Yang, X.; Mo, J. The application of unmanned aircraft systems to plant protection in China. Precis. Agric. 2017, 19, 278–292. [Google Scholar] [CrossRef]
- Berner, B.; Chojnacki, J. Use of drones in crop protection. In Proceedings of the IX International Scientific Symposium Farm Machinery and Processes Management in Sustainable Agriculture, Lublin, Poland, 22–24 November 2017; pp. 46–51. [Google Scholar] [CrossRef]
- Qin, W.C.; Qiu, B.J.; Xue, X.Y.; Chen, C.; Xu, Z.F.; Zhou, Q.Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- Zhou, L.P.; He, Y. Simulation and optimization of multi spray factors in UAV. In Proceedings of the 2016 ASABE Annual International Meeting, Orlando, FL, USA, 17–20 July 2016; American Society of Agricultural and Biological Engineers: Saint Joseph, MI, USA, 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Rahman, M.F.F.; Fan, S.; Zhang, Y.; Chen, L.A. Comparative Study on Application of Unmanned Aerial Vehicle Systems in Agriculture. Agriculture 2021, 11, 22. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.P.L.F.; Krishnamachari, B.; Ueyama, J. An adaptive approach for UAV-based pesticide spraying in dynamic environments. Comput. Electron. Agric. 2017, 138, 210–223. [Google Scholar] [CrossRef]
- Berner, B.; Pachuta, A.; Chojnacki, J. Estimation of liquid deposition on corn plants sprayed from a drone. In Proceedings of the 25th International PhD Students Conference (MendelNet 2018), Brno, Czech Republic, 7–8 November 2018; Cerkal, R., Březinová Belcredi, N., Prokešová, L., Eds.; Mendel University in Brno: Brno, Czech Republic, 2018; pp. 403–407. [Google Scholar]
- Huang, Y.J.; Thomson, S.W.; Hoffmann, C.; Lan, Y.K.; Fritz, B. Development and prospect of unmanned aerial vehicle technologies for agricultural production management. Int. J. Agric. Biol. Eng. 2013, 6, 1–10. [Google Scholar] [CrossRef]
- Srivastava, K.; Pandey, P.C.; Sharma, J.K. An Approach for Route Optimization in Applications of Precision Agriculture Using UAVs. Drones 2020, 4, 58. [Google Scholar] [CrossRef]
- Hentschke, M.; Pignaton de Freitas, E.; Hennig, C.H.; Girardi da Veiga, I.C. Evaluation of Altitude Sensors for a Crop Spraying Drone. Drones 2018, 2, 25. [Google Scholar] [CrossRef] [Green Version]
- Shenzhen GC Electronics CO., LTD. Available online: https://www.4fpv.com/ProductIndex (accessed on 15 May 2021).
- AGRAS T30. Available online: https://ag.dji.com/ (accessed on 15 May 2021).
- Yallappa, D.; Veerangouda, M.; Maski, D.; Palled, V.; Bheemanna, M. Development and evaluation of drone mounted sprayer for pesticide applications to crops. In Proceedings of the 2017 IEEE Global Humanitarian Technology Conference (GHTC), San Jose, CA, USA, 19–22 October 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Costa, F.G.; Pessin, G.; Ueyama, J.; Vieira, H.F.; Colombo, A.; Fini, P.H.; Villas, L.; Osório, F.S.; Vargas, P.A. The use of unmanned aerial vehicles and wireless sensor networks for spraying pesticides. J. Syst. Archit. 2014, 60, 393–404. [Google Scholar] [CrossRef]
- Richardson, B.; Thistle, H.W. Measured and predicted aerial spray interception by a young pinus radiata canopy. Trans. ASABE 2006, 49, 15–23. [Google Scholar] [CrossRef]
- Zhang, P.; Wang, K.; Lyu, Q.; He, S.; Yi, S.; Xie, R.; Zheng, Y.; Ma, Y.; Deng, L. Droplet distribution and control against citrus Leafminer with UAV spraying. Int. J. Robot. Autom. 2017, 32, 299–307. [Google Scholar] [CrossRef] [Green Version]
- Hou, C.J.; Tang, Y.; Luo, S.M.; Lin, J.T.; He, Y.; Zhuang, J.J.; Huang, W. Optimization of control parameters of droplet density in citrus trees using UAVs and the Taguchi method. Int. J. Agric. Biol. Eng. 2019, 12, 1–9. [Google Scholar] [CrossRef]
- Meng, Y.; Su, J.; Song, J.; Chen, W.H.; Lan, Y. Experimental evaluation of UAV spraying for peach trees of different shapes: Effects of operational parameters on droplet distribution. Comput. Electron. Agric. 2020, 170, 105282. [Google Scholar] [CrossRef]
- Garcerá, C.; Moltó, E.; Chueca, P. Spray pesticide applications in Mediterranean citrus orchards: Canopy deposition and off-target losses. Sci. Total Environ. 2017, 599–600, 1344–1362. [Google Scholar] [CrossRef]
- Van de Zande, J.C.; Wenneker, M.; Michielsen, J.M.G.P.; Stallinga, H.; van Velde, P.; Joosten, N. Nozzle classification for drift reduction in orchard spraying. Asp. Appl. Biol. 2012, 114, 253–260. [Google Scholar]
- Cross, J.V.; Walklate, P.J.; Murray, R.A.; Richardson, G.M. Spray deposits and losses in different sized apple trees from an axial fan orchard sprayer: 2. Effects of spray quality. Crop Prot. 2001, 20, 333–343. [Google Scholar] [CrossRef]
- Di Prinzio, A.; Behmer, S.; Magdalena, J.; Chersicla, G. Effect of Pressure on the Quality of Pesticide Application in Orchards. Chil. J. Agric. Res. 2008, 70, 674–678. [Google Scholar] [CrossRef] [Green Version]
- Holownicki, R.; Doruchowski, G.; Swiechowski, W.; Godyn, A.; Konopacki, P.J. Variable air assistance system for orchard sprayers; concept, design and preliminary testing. Biosyst. Eng. 2017, 163, 134–149. [Google Scholar] [CrossRef]
- Doruchowski, G.; Swiechowski, W.; Masny, S.; Maciesiak, A.; Tartanus, M.; Bryk, H.; Holownicki, R. Low-drift nozzles vs. standard nozzles for pesticide application in the biological efficacy trials of pesticides in apple pest and disease control. Sci. Total Environ. 2017, 575, 1239–1246. [Google Scholar] [CrossRef]
- Pai, N.; Salyani, M.; Sweeb, R.D. Regulating airflow of orchard air-blast sprayer based on tree foliage density. Trans. ASABE 2009, 52, 1423–1428. [Google Scholar] [CrossRef]
- Duga, A.T.; Ruysen, K.; Dekeyser, D.; Nuyttens, D.; Bylemans, D.; Nicolai, B.M.; Verboven, P. Spray deposition profiles in pome fruit trees: Effects of sprayer design, training system and tree canopy characteristics. Crop Prot. 2015, 67, 200–213. [Google Scholar] [CrossRef]
- Panneton, B.; Philion, V.; Chouinard, G. Spray deposition with conventional nozzles, low-drift nozzles, or permanent sprinklers for controlling apple orchard pests. Trans. ASABE 2015, 58, 607–619. [Google Scholar] [CrossRef]
- Tang, Y.; Houa, C.J.; Luoa, S.M.; Lina, J.T.; Yangb, Z.; Huanga, W.F. Effects of operation height and tree shape on droplet deposition in citrus trees using an unmanned aerial vehicle. Comput. Electron. Agric. 2018, 148, 1–7. [Google Scholar] [CrossRef]
- Zhang, P.; Deng, L.; Lyu, Q.; He, S.; Yi, S.; Liu, Y.; Yu, Y.; Pan, H. Effects of citrus tree-shape and spraying height of small unmanned aerial vehicle on droplet distribution. Int. J. Agric. Biol. Eng. 2016, 9, 45–52. [Google Scholar] [CrossRef]
- Cheng, Z.; Qi, L.; Cheng, Y.; Wu, Y.; Zhang, H. Interlacing Orchard Canopy Separation and Assessment using UAV Images. Remote Sens. 2020, 12, 767. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Z.; Qi, L.; Cheng, Y. Cherry Tree Crown Extraction from Natural Orchard Images with Complex Backgrounds. Agriculture 2021, 11, 431. [Google Scholar] [CrossRef]
- Pachuta, A.; Berner, B.; Chojnacki, J. Evaluation of liquid transverse distribution under a twin spray jet installed on a drone. In Proceedings of the 25th International PhD Students Conference (MendelNet 2018), Brno, Czech Republic, 7–8 November 2018; Cerkal, R., Březinová Belcredi, N., Prokešová, L., Eds.; Mendel University in Brno: Brno, Czech Republic, 2018; pp. 458–462. [Google Scholar]
- Qing, T.; Ruirui, Z.; Liping, C.; Min, X.; Tongchuan, Y.; Bin, Z. Droplets movement and deposition of an eight-rotor agricultural UAV in downwash flow field. Int. J. Agric. Biol. Eng. 2017, 10, 47–56. [Google Scholar] [CrossRef]
- Sarghini, F.; De Vivo, A. Interference Analysis of an Heavy Lift Multirotor Drone Flow Field and Transported Spraying System. Chem. Eng. Trans. 2017, 58, 631–636. [Google Scholar] [CrossRef]
- Richardson, B.; Rolando, C.; Kimberley, M. Quantifying spray deposition from a UAV configured for spot spray applications to individual plants. Trans. ASABE 2020, 63, 1049–1058. [Google Scholar] [CrossRef]
- Wang, C.; Herbst, A.; Zeng, A.; Wongsuk, S.; Qiao, B.; Qi, P.; Bonds, J.; Overbeck, V.; Yang, Y.; Gao, W.; et al. Assessment of spray deposition, drift and mass balance from unmanned aerial vehicle sprayer using an artificial vineyard. Sci. Total Environ. 2021, 777, 146181. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Qi, L.; Wu, Y.; Musiu, E.M.; Cheng, Z.; Wang, P. Numerical simulation of airflow field from a six-rotor plant protection drone using lattice Boltzmann method. Biosyst. Eng. 2020, 197, 336–351. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.; He, Y.; Liu, F.; Cen, H.; Fang, H. Near ground platform development to simulate UAV aerial spraying and its spraying test under different conditions. Comput. Electron. Agric. 2018, 148, 8–18. [Google Scholar] [CrossRef]
- Lechler. Available online: https://www.lechler.com/de-en (accessed on 15 May 2021).
- TTA M4E. Available online: https://www.ttaviation.org/pro/tta-m4e-5l-agriculture-drone (accessed on 15 May 2021).
- Berner, B.; Chojnacki, J. Evaluation of the thrust force of a multirotor agricultural drone. J. Res. Appl. Agric. Eng. 2018, 63, 6–8. [Google Scholar]
- Pascuzzi, S.; Cerruto, E. Spray deposition in “tendone” vineyards when using a pneumatic electrostatic sprayer. Crop Prot. 2015, 68, 1–11. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Air-Injector Nozzle | Twin Flat Spray Nozzle | Flat Spray Nozzle | ||
|---|---|---|---|---|
| Rotations, rpm | 0 | 6000 | 0 | 6000 |
| Samplers inside of tree, 10−6 g | 21.07 ± 2.26 | 31.23 ± 2.89 | 21.36 ± 2.34 | 27.81 ± 2.21 |
| Samplers without tree, 10−6 g | 32.72 ± 1.83 | 43.26 ± 2.30 | 34.66 ± 0.78 | 30.69 ± 2.51 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chojnacki, J.; Pachuta, A. Impact of the Parameters of Spraying with a Small Unmanned Aerial Vehicle on the Distribution of Liquid on Young Cherry Trees. Agriculture 2021, 11, 1094. https://doi.org/10.3390/agriculture11111094
Chojnacki J, Pachuta A. Impact of the Parameters of Spraying with a Small Unmanned Aerial Vehicle on the Distribution of Liquid on Young Cherry Trees. Agriculture. 2021; 11(11):1094. https://doi.org/10.3390/agriculture11111094
Chicago/Turabian StyleChojnacki, Jerzy, and Aleksandra Pachuta. 2021. "Impact of the Parameters of Spraying with a Small Unmanned Aerial Vehicle on the Distribution of Liquid on Young Cherry Trees" Agriculture 11, no. 11: 1094. https://doi.org/10.3390/agriculture11111094
APA StyleChojnacki, J., & Pachuta, A. (2021). Impact of the Parameters of Spraying with a Small Unmanned Aerial Vehicle on the Distribution of Liquid on Young Cherry Trees. Agriculture, 11(11), 1094. https://doi.org/10.3390/agriculture11111094