
The Asymmetric Laplace Gaussian (ALG) Distribution as the Descriptive Model for the Internal Proactive Inhibition in the Standard Stop Signal Task

 ,
,  , , and
, , and
Abstract
1. Introduction
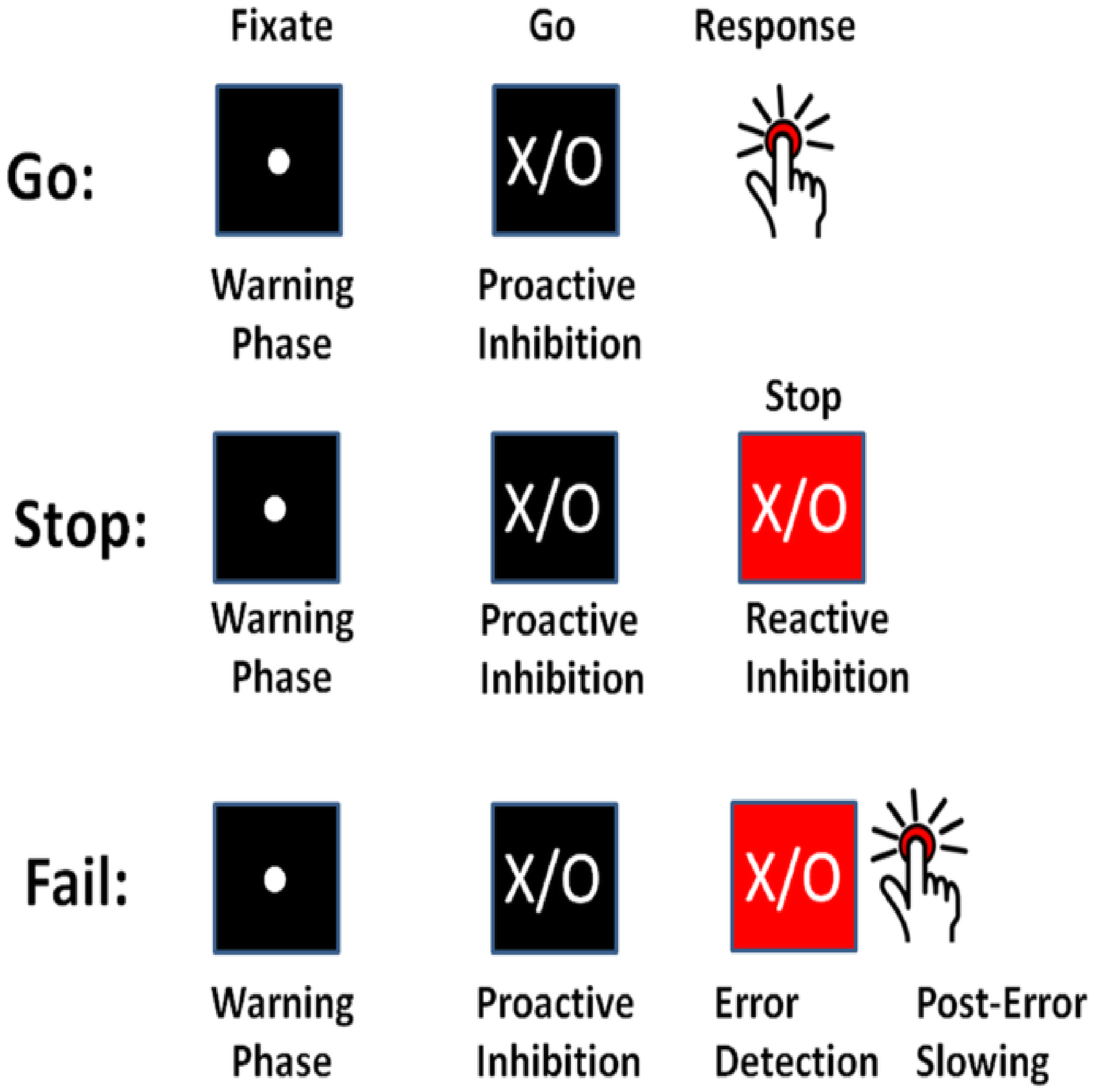
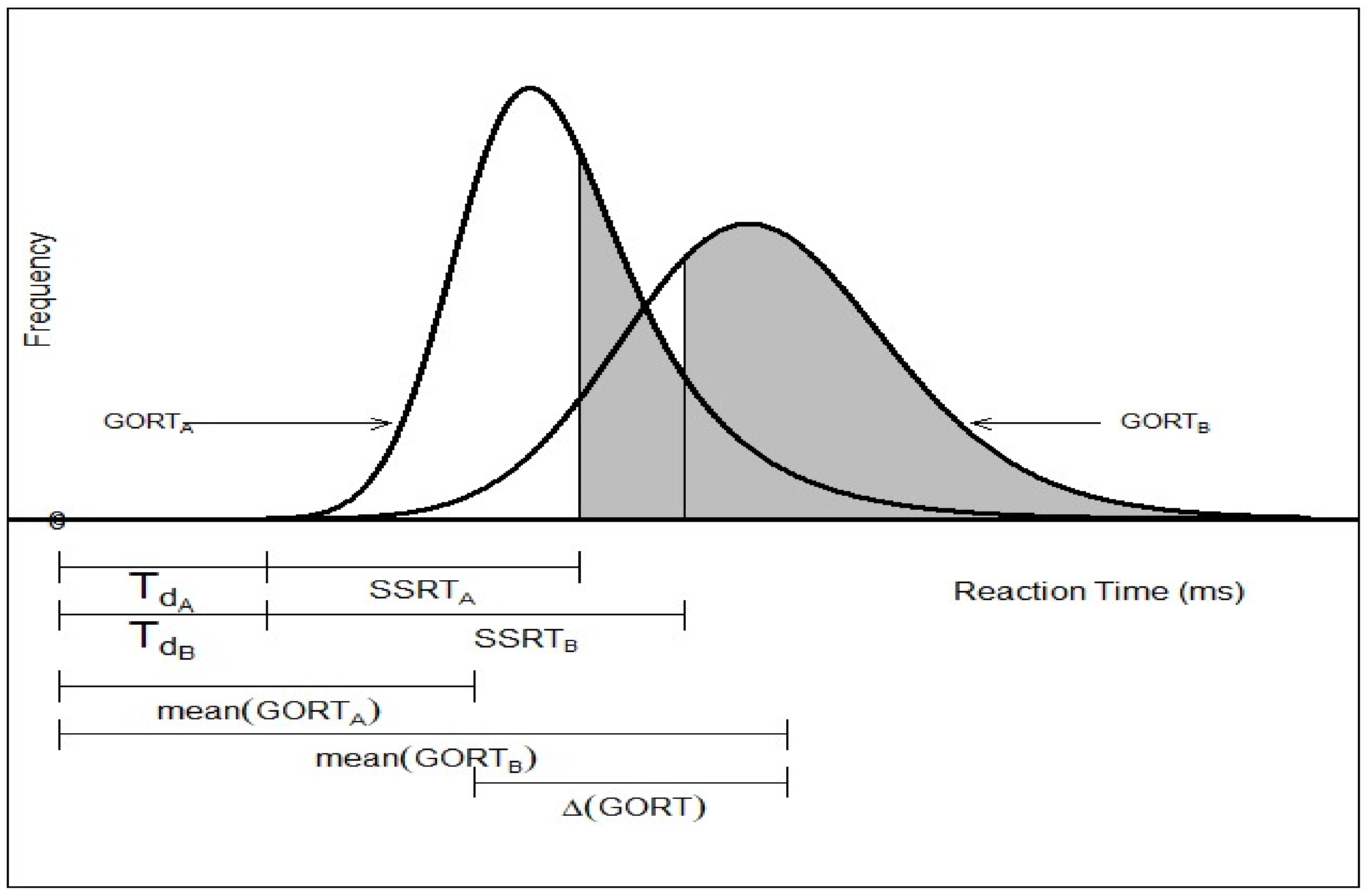
1.1. Stop Signal Task and the Race Model
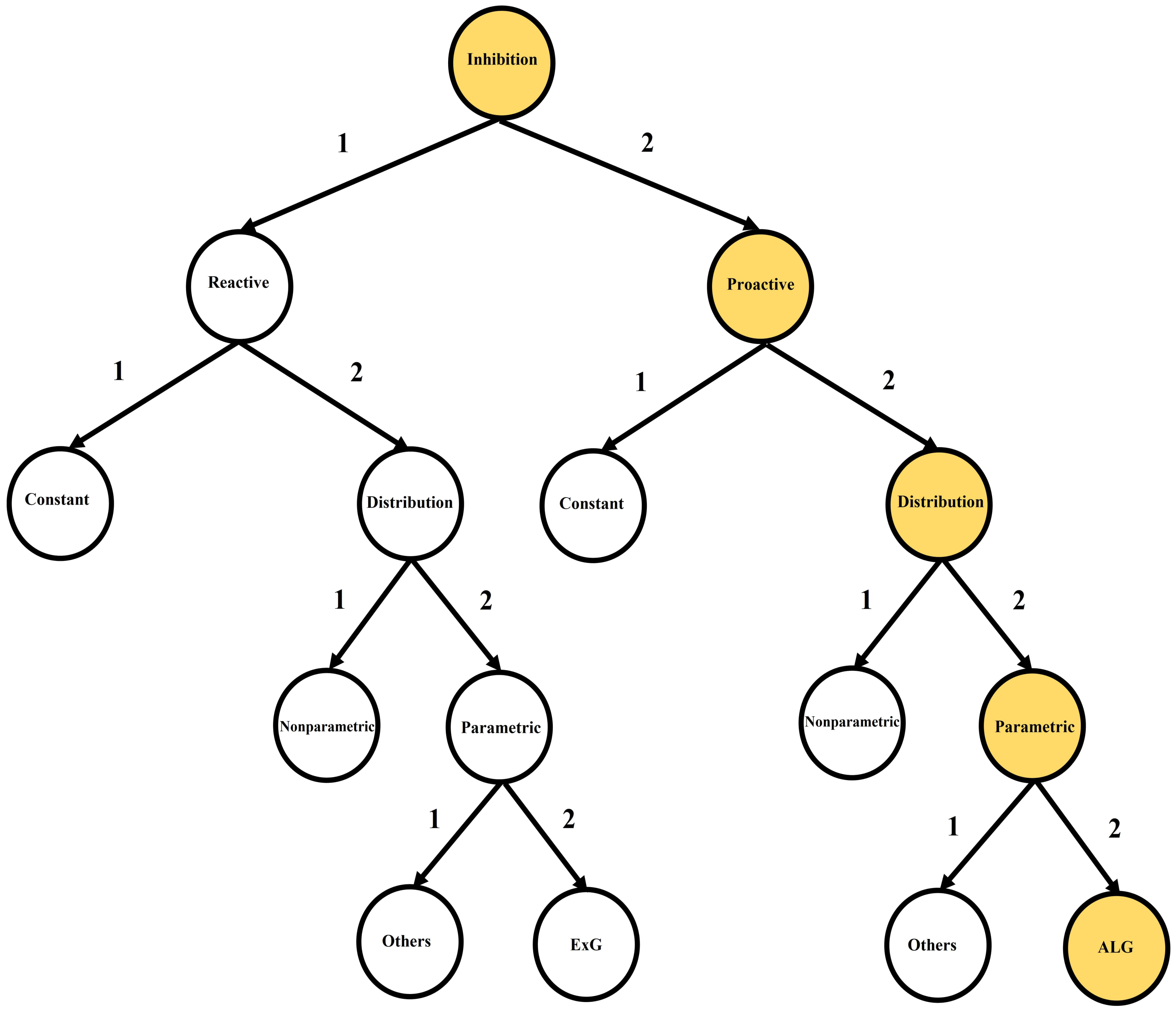
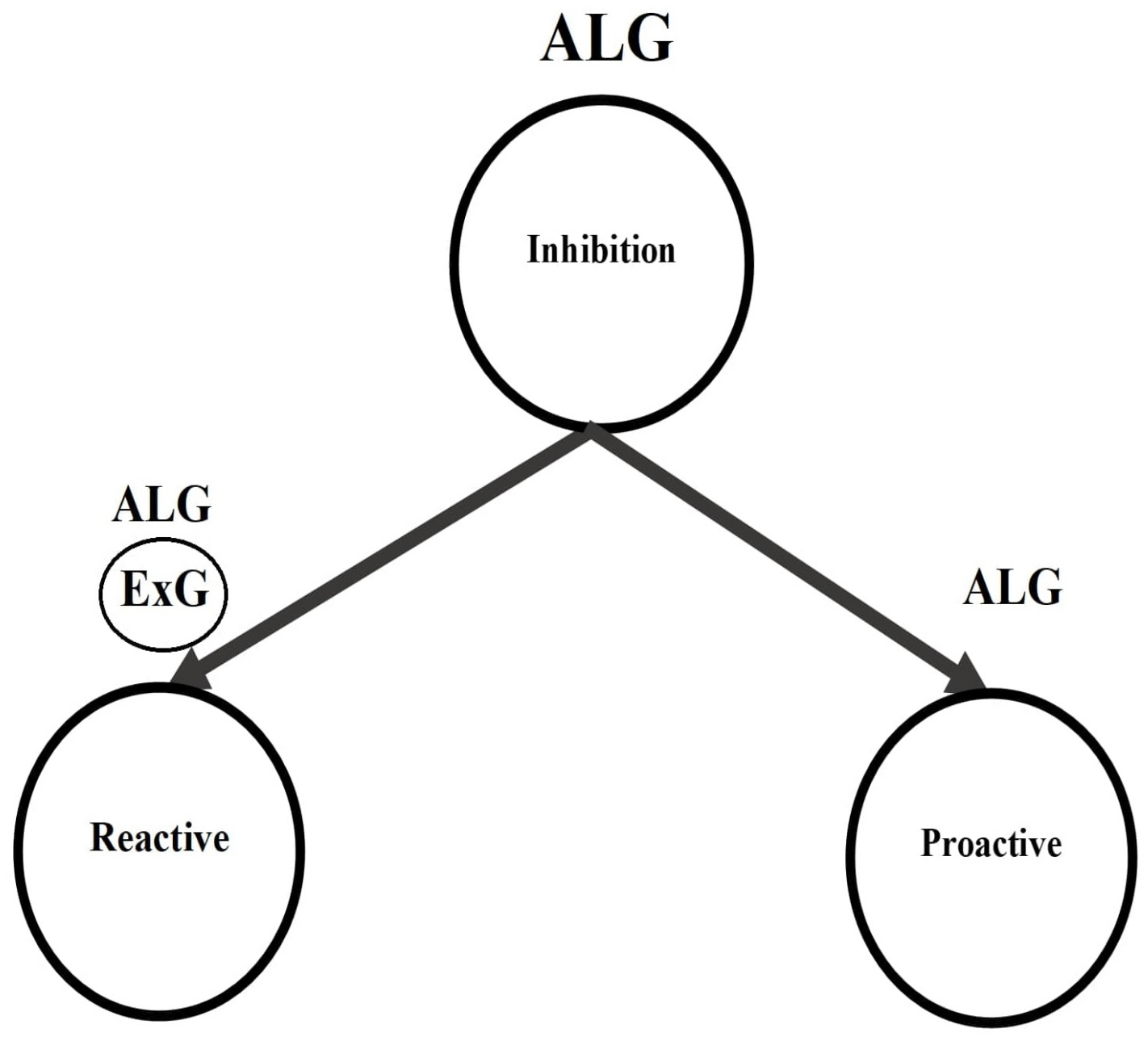
1.2. Components of Inhibition
1.3. Estimations of Proactive Inhibition
1.3.1. Constant Index
1.3.2. Motivation
1.4. Study Outline
2. Mathematical Preliminaries
2.1. Preliminaries on Component Distributions
2.2. Stop Signal Task Probability Space and Random Variables
2.3. Proactive Inhibition Index
3. Results
3.1. Mathematical Analysis
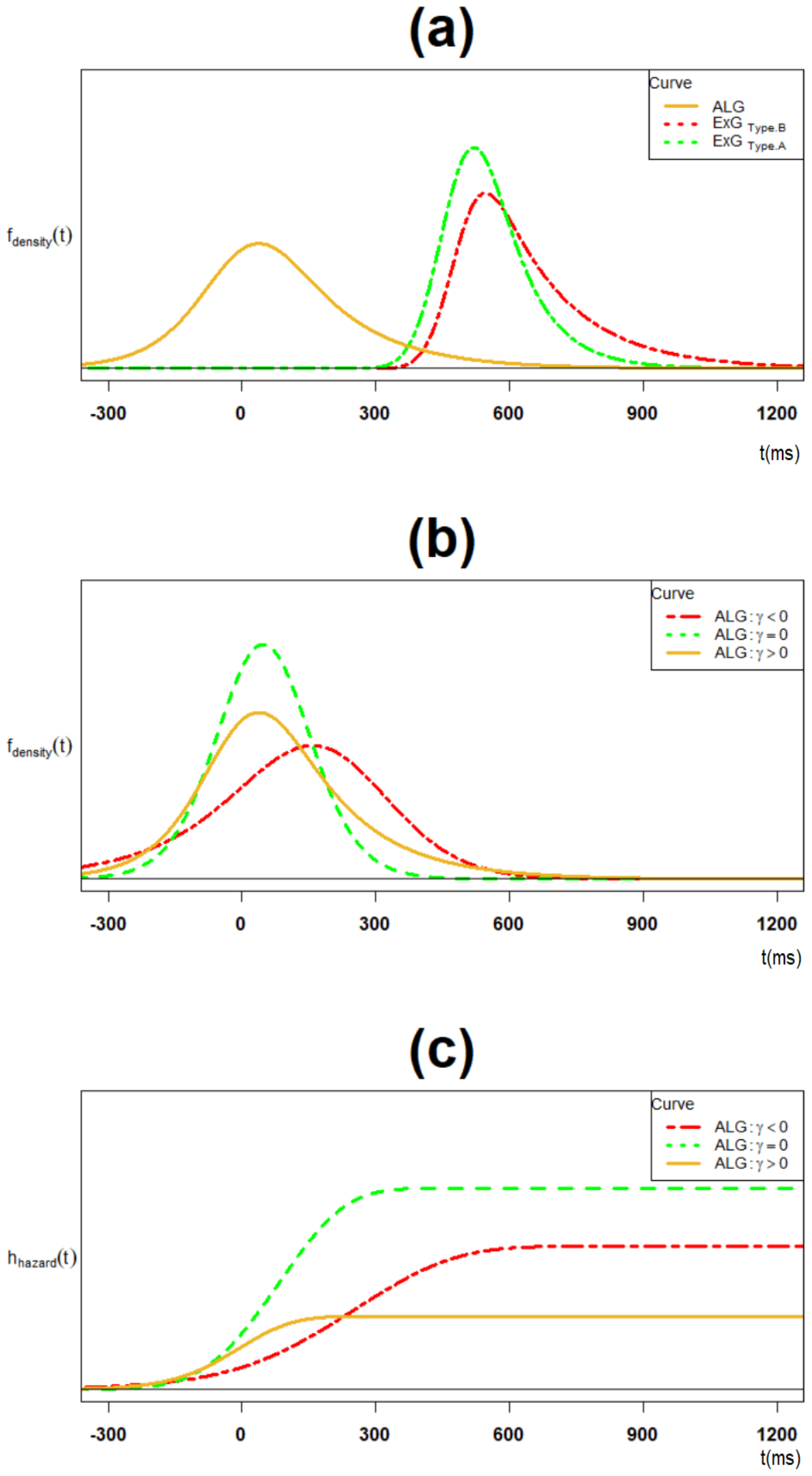
3.1.1. The Proactive Inhibition Distribution and its Parameters
3.1.2. The Proactive Inhibition’s Key ALG Distributional Properties
3.2. The Empirical Example
- Partition the Single SST data to type-A SST data and type-B SST data,
- Fit IBPA with underlying ExG assumption to type-A SST data and type-B SST data,
- Retrieve mean posterior ExG parameters to type-A GORT data and type-B GORT data,
- Plug the estimations in previous step into the ALG model presented in Theorem 5.
3.2.1. Materials & Methods
Data
Participants
The SST Clusters
3.2.2. Statistical Analysis
| Data | Individual Priors |
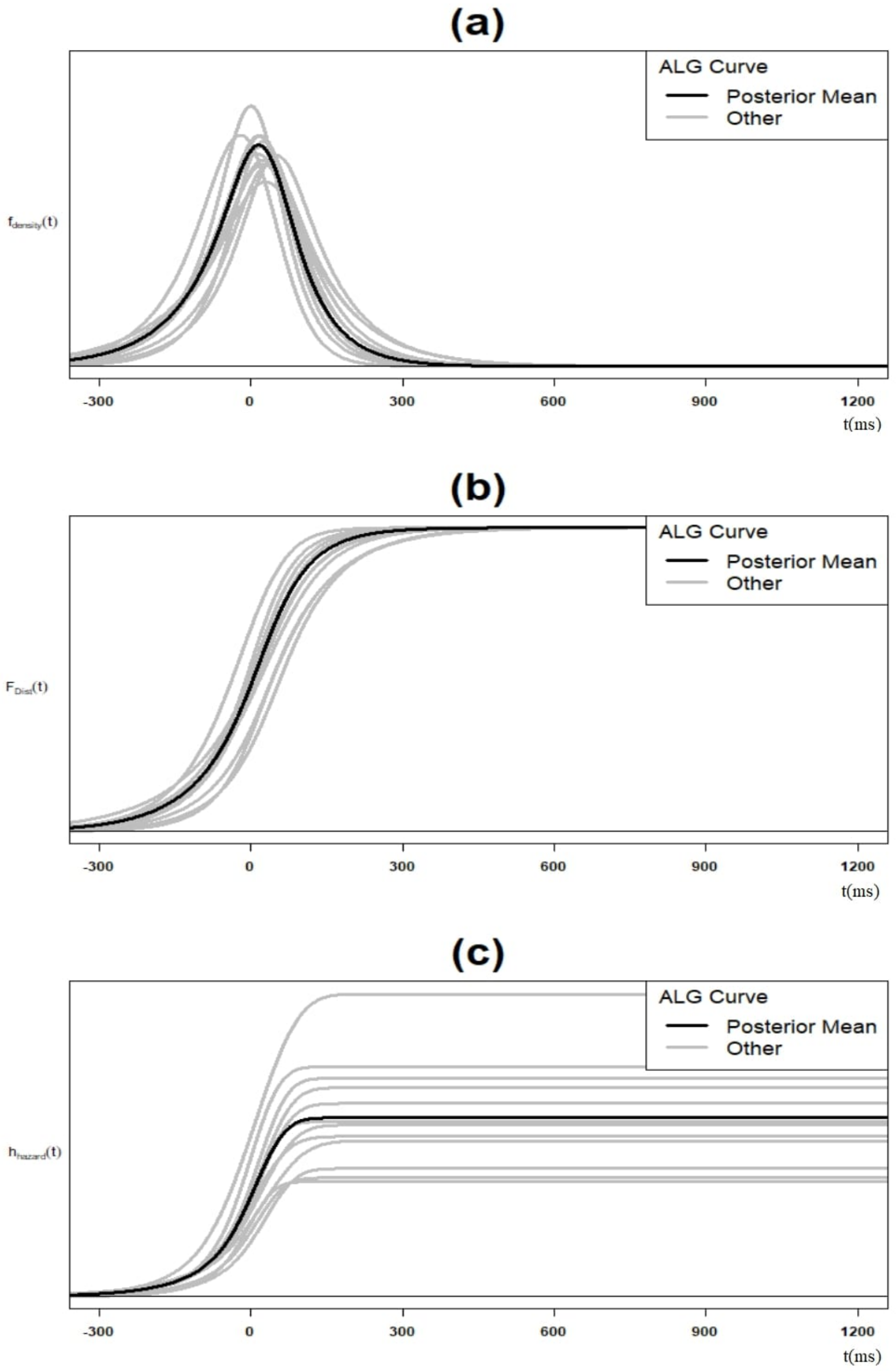
3.2.3. The ALG Model for Proactive Inhibition
3.2.4. Proactive Inhibition ALG Model versus Reactive Inhibition ExG Model
4. Discussion
4.1. Present Work
4.2. Future Work
4.3. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADHD | Attention Deficit Hyperactivity Disorder |
| AL | Asymmetric Laplace |
| ALG | Asymmetric Laplace Gaussian |
| BPA | Bayesian Parametric Approach |
| CDF | Cumulative Distribution Function |
| ExG | Ex-Gaussian distribution |
| GORT | Reaction Time in a go trial |
| GORTA | Reaction Time in a type A go trial |
| GORTB | Reaction Time in a type B go trial |
| HBPA | Hierarchical Bayesian Parametric Approach |
| IBPA | Individual Bayesian Parametric Approach |
| NL | Normal Laplace |
| OCD | Obsessive Compulsive Disorder |
| RT | Reaction Times |
| SE | Sequential Effect |
| SRRT | Reaction Time in a failed stop trial |
| SSRT | Stop Signal Reaction Times in a stop trial |
| SSD | Stop Signal Delay |
| SST | Stop Signal Task |
Appendix A
Appendix A.1. Proofs
Appendix A.1.1. Proof of Theorem 5
Appendix A.1.2. Proof of Theorem 6
Appendix A.1.3. Proof of Theorem 7
Appendix A.1.4. Proof of Theorem 8
Appendix A.1.5. Proof of Theorem 9
Appendix A.2. ExG Cluster Type Models Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter | Parameter | |||||||
|---|---|---|---|---|---|---|---|---|---|
| # | |||||||||
| 1 | 357 | 350 | 372 | 32 | 35 | 14 | 86 | 96 | 68 |
| 2 | 637 | 599 | 732 | 175 | 170 | 132 | 47 | 48 | 68 |
| 3 | 469 | 484 | 411 | 60 | 57 | 42 | 76 | 73 | 111 |
| 4 | 597 | 567 | 631 | 163 | 165 | 96 | 66 | 69 | 149 |
| 5 | 640 | 618 | 608 | 156 | 133 | 58 | 47 | 62 | 121 |
| 6 | 452 | 431 | 469 | 108 | 106 | 64 | 66 | 65 | 135 |
| 7 | 689 | 668 | 664 | 136 | 130 | 146 | 47 | 60 | 115 |
| 8 | 665 | 609 | 660 | 145 | 91 | 237 | 51 | 103 | 120 |
| 9 | 543 | 484 | 640 | 166 | 151 | 118 | 120 | 147 | 157 |
| 10 | 470 | 468 | 483 | 56 | 59 | 52 | 98 | 87 | 156 |
| 11 | 414 | 399 | 597 | 46 | 37 | 118 | 177 | 168 | 80 |
| 12 | 557 | 534 | 597 | 132 | 128 | 146 | 53 | 58 | 123 |
| 13 | 550 | 538 | 564 | 137 | 133 | 98 | 55 | 38 | 190 |
| 14 | 319 | 318 | 365 | 307 | 295 | 370 | 170 | 137 | 264 |
| 15 | 421 | 416 | 437 | 61 | 56 | 90 | 138 | 142 | 149 |
| 16 | 358 | 342 | 389 | 61 | 57 | 61 | 48 | 56 | 57 |
| 17 | 594 | 599 | 561 | 130 | 130 | 133 | 78 | 62 | 196 |
| 18 | 467 | 397 | 747 | 229 | 190 | 299 | 127 | 131 | 159 |
| 19 | 426 | 426 | 424 | 67 | 75 | 50 | 102 | 103 | 110 |
| 20 | 423 | 449 | 504 | 62 | 74 | 129 | 122 | 65 | 169 |
| 21 | 521 | 519 | 487 | 144 | 157 | 96 | 91 | 97 | 125 |
| 22 | 397 | 346 | 463 | 87 | 58 | 110 | 94 | 132 | 101 |
| 23 | 540 | 525 | 588 | 80 | 78 | 79 | 94 | 88 | 128 |
| 24 | 592 | 571 | 529 | 176 | 136 | 304 | 46 | 69 | 180 |
| 25 | 577 | 459 | 602 | 165 | 70 | 244 | 69 | 181 | 124 |
| 26 | 562 | 555 | 694 | 79 | 75 | 160 | 172 | 154 | 148 |
| 27 | 446 | 436 | 541 | 71 | 60 | 166 | 240 | 236 | 233 |
| 28 | 486 | 476 | 629 | 82 | 64 | 196 | 172 | 155 | 151 |
| 29 | 414 | 363 | 391 | 133 | 66 | 213 | 62 | 115 | 111 |
| 30 | 486 | 484 | 541 | 87 | 86 | 146 | 141 | 127 | 181 |
| 31 | 546 | 502 | 656 | 137 | 118 | 157 | 90 | 100 | 137 |
| 32 | 436 | 421 | 462 | 107 | 109 | 90 | 72 | 81 | 88 |
| 33 | 452 | 454 | 458 | 38 | 46 | 40 | 156 | 156 | 165 |
| 34 | 404 | 422 | 408 | 105 | 109 | 42 | 95 | 72 | 92 |
| 35 | 470 | 549 | 595 | 230 | 200 | 298 | 207 | 171 | 136 |
| 36 | 429 | 400 | 448 | 116 | 139 | 95 | 158 | 163 | 245 |
| 37 | 521 | 497 | 507 | 89 | 130 | 68 | 112 | 125 | 222 |
| 38 | 284 | 271 | 321 | 40 | 37 | 53 | 100 | 108 | 91 |
| 39 | 424 | 432 | 416 | 57 | 55 | 87 | 70 | 52 | 131 |
| 40 | 419 | 418 | 476 | 52 | 53 | 196 | 145 | 148 | 105 |
| 41 | 533 | 537 | 517 | 105 | 151 | 93 | 72 | 35 | 159 |
| 42 | 388 | 445 | 497 | 53 | 145 | 206 | 145 | 57 | 116 |
| 43 | 506 | 467 | 539 | 97 | 82 | 100 | 66 | 96 | 78 |
| 44 | 842 | 824 | 822 | 175 | 341 | 165 | 34 | 95 | 320 |
Appendix A.3. Uncertainty in Parameter Estimates

References
- Matzke, D.; Verbrugen, F.; Logan, G.D. The title of the cited contribution. In Steven Handbook of Experimental Psychology and Cognitive Neuroscience, 4th ed.; Volume 5. Methodology; Wixted, J.T., Ed.; John Wiley & Sons. Inc: Hoboken, NJ, USA, 2018. [Google Scholar]
- Aron, A.R. From reactive to proactive and selective control: Developing a richer model for stopping inappropriate responses. Biol. Psychiatry 2011, 69, e55–e68. [Google Scholar] [CrossRef] [PubMed]
- Johnston, S.; Dinoske, A.; Smith, J.; Bang, R.J. The Development of Stop Signal and Go/No-go Response Inhibition in Children Aged 7–12 years: Performance and Event Related Potential Indices. Int. J. Psychol. 2007, 63, 25–38. [Google Scholar] [CrossRef] [PubMed]
- Chevrier, A.; Schachar, R.J. BOLD differences normally attributed to inhibitory control predict symptoms, not task-directed inhibitory control in ADHD. J. Neurodev. Disord. 2020, 12, 1–12. [Google Scholar] [CrossRef]
- Ollman, R.T.; Billington, M.J. The Deadline Model for Simple Reaction Times. Cogn. Psychol. 1972, 3, 311–336. [Google Scholar] [CrossRef]
- Ollman, R.T. Simple Reactions with Random Countermanding of the go Signal. In Attention and Performance IV; Kornblum, S., Ed.; Academic Press: New York, NY, USA, 1973. [Google Scholar]
- Logan, G.D. Attention, Automaticity, and the Ability to Stop a Speeded Choice Response. In Attention and Performance IX; Long, J., Baddeley, A.D., Eds.; Erlbaum: Hillsdale, NJ, USA, 1981. [Google Scholar]
- Boucher, L.; Palmeri, T.J.; Logan, G.D.; Schall, J.D. Inhibitory Control in Mind and Brain: An Interactive Race Model of Countermanding Saccades. Psychol. Rev. 2007, 114, 376–397. [Google Scholar] [CrossRef]
- Hans, D.P.; Schall, J.D. Countermanding Saccades in Macaque. Vis. Neurosci. 1995, 12, 929–937. [Google Scholar] [CrossRef]
- Bissett, P.G.; Jones, H.M.; Poldrack, R.A.; Logan, G.D. Severe violations of independence in response inhibition tasks. Sci. Adv. 2021, 7, eabf4355. [Google Scholar] [CrossRef]
- Van Rooji, S.J.H.; Rademaker, A.R.; Kennis, M.; Vink, M.; Kahn, R.S.; Geuze, E. Impaired right inferior frontal gyrus-response to contextual cues in male veterans with PTSD during response inhibition. J. Psychiatry Neurosci. 2014, 35, 330–338. [Google Scholar] [CrossRef]
- Zandbelt, B.B.; Van Buuren, M.; Kahn, R.S.; Vink, M. Reduced Proactive Inhibition in Schizophrenia is related to Corticotriatal dysfunction and poor working memory. Biol. Psychiatry 2011, 70, 1151–1158. [Google Scholar] [CrossRef]
- Vink, M.; Zandbelt, B.B.; Gladwin, T.; Hillegers, M.; Hoogendam, J.M.; Van der Wildenberg, W.P.M.; Du Plessis, S.; Kahn, R.S. Frontostriatal Activity and Connectivity Increase During Proactive Inhibition Across Adolescence and Early Adulthood. Hum. Brain Mapp. 2014, 35, 4415–4427. [Google Scholar] [CrossRef]
- Bartholly, S.; Rennalls, S.J.; Jacques, C.; Darby, H.; Campbell, I.C.; Schmidt, U.; Odaly, O.G. Proactive and reactive inhibitory control in eating disorders. Psychiatry Res. 2017, 255, 432–440. [Google Scholar] [CrossRef] [PubMed]
- Brevers, D.; Voubusson, E.; Dejonghe, F.; Dutrieux, J.; Detiea, M.; Cheron, G.; Verbanck, D.; Foucart, J. Proactive and Reactive Motor Inhibition in Top Athletes versus Nonathletes. Percept. Mot. Skills 2018, 125, 289–312. [Google Scholar] [CrossRef] [PubMed]
- Castro-Meneses, L.J.; Johnston, B.W.; Sowman, D.F. The effects of impulsivity and proactive inhibition on reactive inhibition and go process: Insights from vocal and manual stop signal tasks. Front. Hum. Neurosci. 2018, 9, 529. [Google Scholar] [CrossRef] [PubMed]
- Dicaprio, V.; Modugno, N.; Mancini, C.; Olivia, E.; Mirabella, G. Early Stage Parkinson’s Patients Show Selective Impairment in Reactive but not Proactive Inhibition. Mov. Disord. 2020, 35, 409–418. [Google Scholar] [CrossRef]
- Ide, J.S.; Shenoy, P.; Yu, A.J.; Li, C.S. Bayesian Prediction and Evaluation in the Anterior Cingulate Cortex. J. Neurosci. 2013, 33, 2039–2047. [Google Scholar] [CrossRef] [PubMed]
- Matzke, D.; Dolan, C.V.; Logan, G.D.; Brown, S.D.; Wagenmakers, E.J. Bayesian Parametric Estimation of Stop Signal Reaction Time Distributions. J. Exp. Psychol. Gen. 2013, 142, 1047–1073. [Google Scholar] [CrossRef]
- Matzke, D.; Love, J.; Wiecki, T.V.; Brown, S.D.; Logan, G.D.; Wagenmakers, E.J. Release the BEESTS: Bayesian Estimation of Ex-Gaussian Stop Signal Reaction Time Distributions. Front. Psychol. 2013, 4, 918. [Google Scholar] [CrossRef]
- Martine Prado, M.; Fermin, D. A Theory of Reaction Times Distributions. Unpublished Work 2008. Available online: http:cggprints.org/6310 (accessed on 15 December 2020).
- Ramautar, J.R.; Kok, A.; Rielderinkhof, K.R. Effects of Stop Signal Probability in the Stop Signal Paradigm: The N2/P3 Complex further validated. Brain Cogn. 2004, 56, 234–252. [Google Scholar] [CrossRef]
- Schwarz, W. The Ex-Wald Distribution as a Descriptive Model of Reaction Time Data. Behav. Res. Methods, Instruments Comput. 2001, 33, 457–469. [Google Scholar] [CrossRef]
- Soltanifar, M.; Dupuis, A.; Schachar, R.; Escobar, M. A frequentist mixture modelling of stop signal reaction times. Biostat. Epidemiol. 2019, 3, 90–108. [Google Scholar] [CrossRef]
- Soltanifar, M.; Escobar, M.; Dupuis, A.; Schachar, R. A Bayesian Mixture Modelling of Stop Signal Reaction Time Distributions: The Second Contextual Solution for the Problem of Aftereffects of Inhibition on SSRT Estimations. Brain Sci. 2021, 11, 1102. [Google Scholar] [CrossRef]
- Soltanifar, M.; Knight, K.; Dupuis, A.; Schachar, R.; Escobar, M. A Time Series-Based Point Estimation of Stop Signal Reaction Times: More Evidence on the Role of Reactive Inhibition-Proactive Inhibition Interplay on the SSRT Estimations. Brain Sci. 2020, 10, 598. [Google Scholar] [CrossRef] [PubMed]
- Rouder, J.N. Are Un-shifted Distributional Models Appropriate for Response Times? Psychometrica 2005, 70, 377–381. [Google Scholar] [CrossRef]
- Zandbelt, B.B.; Bloemendaal, M.; Neggers, S.F.W.; Kahn, R.S.; Vink, M. Expectations and Variations: Declining the Neural Network of Proactive Inhibitory Control. Hum. Brain Mapp. 2013, 34, 2015–2024. [Google Scholar] [CrossRef] [PubMed]
- Colonius, H. A Note on the Stop Signal Paradigm, or How to Observe the Unobservable. Psychol. Rev. 1990, 97, 309–312. [Google Scholar] [CrossRef]
- Aron, A.R.; Robins, T.W.; Poldrack, R.A. Inhibition and the right inferior frontal cortex. Trends Cogn. Sci. 2004, 8, 170–177. [Google Scholar] [CrossRef] [PubMed]
- Chevrier, A.; Cheyne, D.; Graham, S.; Schachar, R. Dissociating Two Stages of Preparation in the Stop Signal Task Using fMRI. PLoS ONE 2015, 10, e0130992. [Google Scholar] [CrossRef]
- Chevrier, A.; Noseworthy, M.D.; Schachar, R. Dissociation of response inhibition and performance monitoring in the stop signal task using event-related fMRI. Hum. Brain Mapp. 2007, 28, 1347–1358. [Google Scholar] [CrossRef]
- Chikazoe, J.; Jimura, K.; Hirose, S.; Yamashita, K.; Miyashita, Y.; Konishi, S. Preparation to inhibit a response complements response inhibition during performance of a stop-signal task. J. Neurosci. 2009, 29, 15870–15877. [Google Scholar] [CrossRef]
- Chevrier, A.; Bhaijiwala, M.; Lipszyc, J.; Cheyne, D.; Graham, S.; Schachar, R. Disrupted reinforcement learning during post-error slowing in ADHD. PLoS ONE 2019, 14, e0206780. [Google Scholar] [CrossRef]
- Wang, W.; Hu, S.; Ide, J.S.; Zhornitsky, S.; Zhang, S.; Yu, A.J.; Li, C.R. Motor Preparation Disrupts Proactive Control in the Stop Signal Task. Front. Hum. Neurosci 2018, 12, 151. [Google Scholar] [CrossRef] [PubMed]
- Mayse, J.D.; Nelson, G.M.; Park, P.; Gallagher, M.; Lin, S.C. Proactive and reactive inhibitory control in rats. Front. Neurosci. 2014, 8, 104. [Google Scholar] [CrossRef] [PubMed]
- Rousselet, G.A.; Wilcox, R.R. Reaction Times and Other Skewed Distributions: Problems with the Mean and Median. Meta Psychol. 2020, 4, 1630. [Google Scholar] [CrossRef]
- Heathcote, A. RTSYS: A DOS Application for the Analysis of Reaction Times Data. Behav. Res. Methods Instrum. Comput. 1996, 28, 427–445. [Google Scholar] [CrossRef]
- Kotz, S.; Kozubowski, T.J.; Podgorski, K. The Laplace Distribution and Generalizations: A Revisit with Applications to Communications, Economics, Engineering and Finance; Birkhauser: Boston, MA, USA, 2001. [Google Scholar]
- Amini, Z.; Rabbani, H. Letter to the editor: Correction to “The Normal-Laplace distribution and its relatives”. Commun. Stat. Theory Methods 2017, 46, 2076–2078. [Google Scholar] [CrossRef]
- Reed, W. The Normal-Laplace distribution and its relatives. In Advances in Distribution Theory, Order Statistics, and Inference (Statistics for Industry and Technology); Balakrishnan, N., Castillo, E., Sarabia Algeria, J.M., Eds.; Birkhäuser: Boston, MA, USA, 2006; pp. 61–73. [Google Scholar]
- Evans, M.J.; Rosenthal, J.S. Probability and Statistics: The Science of Uncertainty, 2nd ed.; W. H. Freeman and Company: New York, NY, USA, 2010. [Google Scholar]
- Barlow, R.E.; Marshall, A.W.; Proschan, F. Properties of Probability Distributions with Monotone Hazard Rate. Ann. Math. Stat. 1966, 37, 1574–1592. [Google Scholar] [CrossRef]
- Luce, R.D. Response Times: Their Role in Inferring Elementary Mental Organizations; Oxford University Press: New York, NY, USA, 1986. [Google Scholar]
- Cimbala, J.; Cengel, Y. Essential of Fluid Mechanics: Fundamentals and Applications: 7-2 Dimensional Homogeneity; McGraw-Hill: New York, NY, USA, 2006; p. 203. [Google Scholar]
- Colonius, H. An Invitation to Coupling and Copulas: With Applications to Multisensory Modelling. J. Math. Psychol. 2016, 74, 2–10. [Google Scholar] [CrossRef][Green Version]
- van Ravenzwaaij, D.; Cassey, P.; Brown, S.D. A Simple Introduction to Markov Chain Monte Carlo Sampling. Psychon. Bull. Rev. 2016, 25, 143–154. [Google Scholar] [CrossRef]
- Crosbie, J.; Arnold, P.; Peterson, A.D.; Swanson, J.; Dupuis, A.; Li, X.; Shan, J.; Goodale, T.; Tam, C.; Strug, L.J. Response Inhibition and ADHD Traits: Correlates and heritability in a Community Sample. J. Abnorm. Child Psychol. 2013, 41, 497–597. [Google Scholar] [CrossRef]
- Signorell, A.; Aho, K.; Alfons, A.; Andregg, N.; Aragon, T.; Arachchige, C. DescTools: Tools for Descriptive Statistics. R Foundation for Statistical Computing, R Package Version 0.99.38; Vienna, Austria, 2020. Available online: http://www.R-project.org/package=DescTools (accessed on 1 January 2021).
- Reed, W.J.; Jorgensen, M. The Double Pareto-lognormal distribution-A New Parametric Model for Size Distributions. Commun. Stat. Theory Methods 2004, 33, 1733–1753. [Google Scholar] [CrossRef]
- Ibragimov, I.A. On the Composition of Unimodal Distributions. Theory Probab. Appl. 1956, 1, 255–260. [Google Scholar] [CrossRef]





| Estimation | Inhibition Component | |
|---|---|---|
| Reactive | Proactive | |
| Constant Index | SSRT | , |
| Examples | ||
| Distribution Index | SSRT | |
| Examples | ExG,LN,Wald | ALG |
| Ex-Wald, Gamma |
| ExG Model | ALG Model | ||||
|---|---|---|---|---|---|
| Cluster | Comparison | Cluster | |||
| Type A | Type B | Type B vs. Type A | Type S | ||
| - | - | - | 104.2 | ||
| - | - | - | (90.4, 117.9) | ||
| - | - | - | 142.4 | ||
| - | - | - | (125.9, 158.8) | ||
| Parameter | 478.8 | 532.8 | 53.9 *** | 53.9 | |
| (448.0, 509.7) | (498.6, 566.9) | (30.9, 76.9) | (30.9, 76.9) | ||
| 109.9 | 133.1 | 23.2 | 179.2 | ||
| (90.5, 129.3) | (108.4, 157.8) | (−0.1, 46.4) | (151.4, 206.9) | ||
| 104.2 | 142.4 | 38.2 *** | - | ||
| (90.4, 117.9) | (125.9, 158.8) | (19.6, 56.8) | - | ||
| Mean | 583.0 | 675.1 | 92.1 *** | 92.1 | |
| (553.0, 612.9) | (633.8, 716.4) | (69.4, 114.9) | (69.4, 114.9) | ||
| Statistics | St.D | 160.6 | 202.4 | 41.8 *** | 260.4 |
| (143.5, 177.8) | (177.9, 226.9) | (25.9, 57.6) | (232.3, 288.6) | ||
| Skewness | 0.787 | 0.918 | 0.131 | 0.186 | |
| (0.602, 0.973) | (0.751, 1.085) | (−0.113, 0.375) | (0.076, 0.296) | ||
| Kurtosis | 4.966 | 5.300 | 0.334 | 1.153 | |
| (4.414, 5.518) | (4.790, 5.808) | (−0.397, 1.064) | (0.923, 1.384) |
| Inhibition | Reactive | Proactive | Proactive vs. Reactive | |
|---|---|---|---|---|
| Index | SSRT | |||
| Model | ExG | ALG | ALG vs. ExG | |
| Statistics | Mean | 196.8 | 92.1 | −104.6 *** |
| (173.5, 220.1) | (69.4, 114.9) | (−140.6, −68.7) | ||
| St.D | 157.8 | 260.4 | 102.6 *** | |
| (139.4, 176.2) | (232.3, 288.6) | (71.8, 133.6) | ||
| Skewness | 0.578 | 0.186 | −0.401 *** | |
| (0.500, 0.674) | (0.076, 0.296) | (−0.540, −0.261) | ||
| Kurtosis | 4.231 | 1.153 | −3.077 *** | |
| (3.998, 4.465) | (0.923, 1.384) | (−3.381, −2.775) |
| Inhibition | Index | # Parameters | # Estimations | Mean | StD | Skewness (+) | Kurtosis | Hazard |
|---|---|---|---|---|---|---|---|---|
| Proactive | 4 | 2 | lower | higher | lower | platykurtic | increasing | |
| Reactive | 3 | 1 | higher | lower | higher | leptokurtic | increasing |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Soltanifar, M.; Escobar, M.; Dupuis, A.; Chevrier, A.; Schachar, R. The Asymmetric Laplace Gaussian (ALG) Distribution as the Descriptive Model for the Internal Proactive Inhibition in the Standard Stop Signal Task. Brain Sci. 2022, 12, 730. https://doi.org/10.3390/brainsci12060730
Soltanifar M, Escobar M, Dupuis A, Chevrier A, Schachar R. The Asymmetric Laplace Gaussian (ALG) Distribution as the Descriptive Model for the Internal Proactive Inhibition in the Standard Stop Signal Task. Brain Sciences. 2022; 12(6):730. https://doi.org/10.3390/brainsci12060730
Chicago/Turabian StyleSoltanifar, Mohsen, Michael Escobar, Annie Dupuis, Andre Chevrier, and Russell Schachar. 2022. "The Asymmetric Laplace Gaussian (ALG) Distribution as the Descriptive Model for the Internal Proactive Inhibition in the Standard Stop Signal Task" Brain Sciences 12, no. 6: 730. https://doi.org/10.3390/brainsci12060730
APA StyleSoltanifar, M., Escobar, M., Dupuis, A., Chevrier, A., & Schachar, R. (2022). The Asymmetric Laplace Gaussian (ALG) Distribution as the Descriptive Model for the Internal Proactive Inhibition in the Standard Stop Signal Task. Brain Sciences, 12(6), 730. https://doi.org/10.3390/brainsci12060730