Particle Swarm Optimization and Cuckoo Search-Based Approaches for Quadrotor Control and Trajectory Tracking


Abstract
:1. Introduction
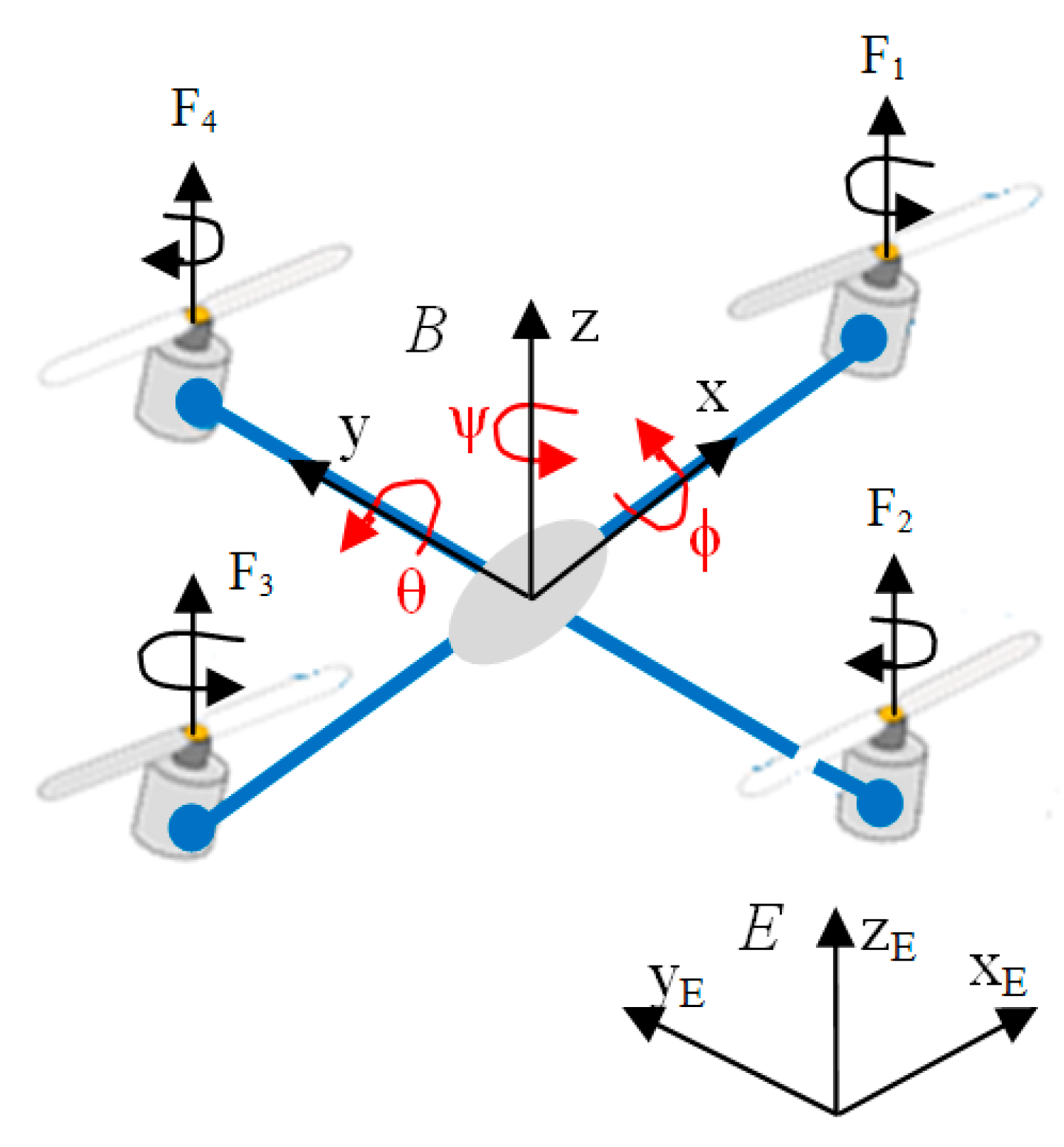
2. Quadrotor Dynamic Modeling
3. Proposed Methods
3.1. PSO Algorithm
- Pbij is the best position found by the particle i;
- Pgij is the best position found by the neighborhood;
- w, C1, and C2 are weighting coefficients;
- R1 and R2 are random variables generated from a uniform distribution in [0,1];
- ⊗ means element wise multiplications.
3.2. CS Algorithm
3.3. Cooperative PSO-CS Algorithm
3.4. RM Method
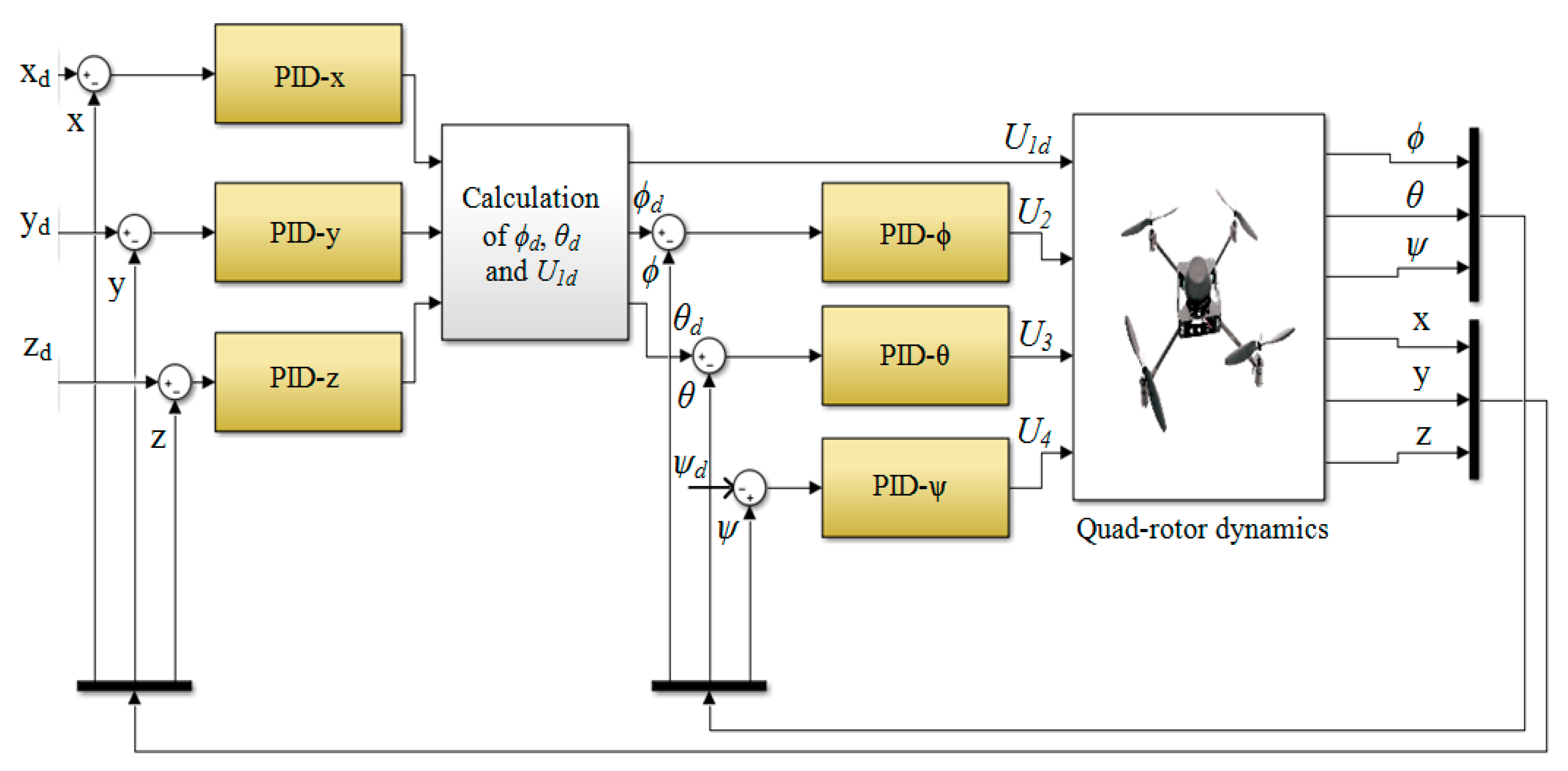
4. Quadrotor Control
4.1. Virtual Control
4.2. Control Law Design
4.3. Quadrotor Intelligent Control Using PSO, CS, and PSO-CS
4.4. Quadrotor Classical Control Using RM
5. Results and Discussions
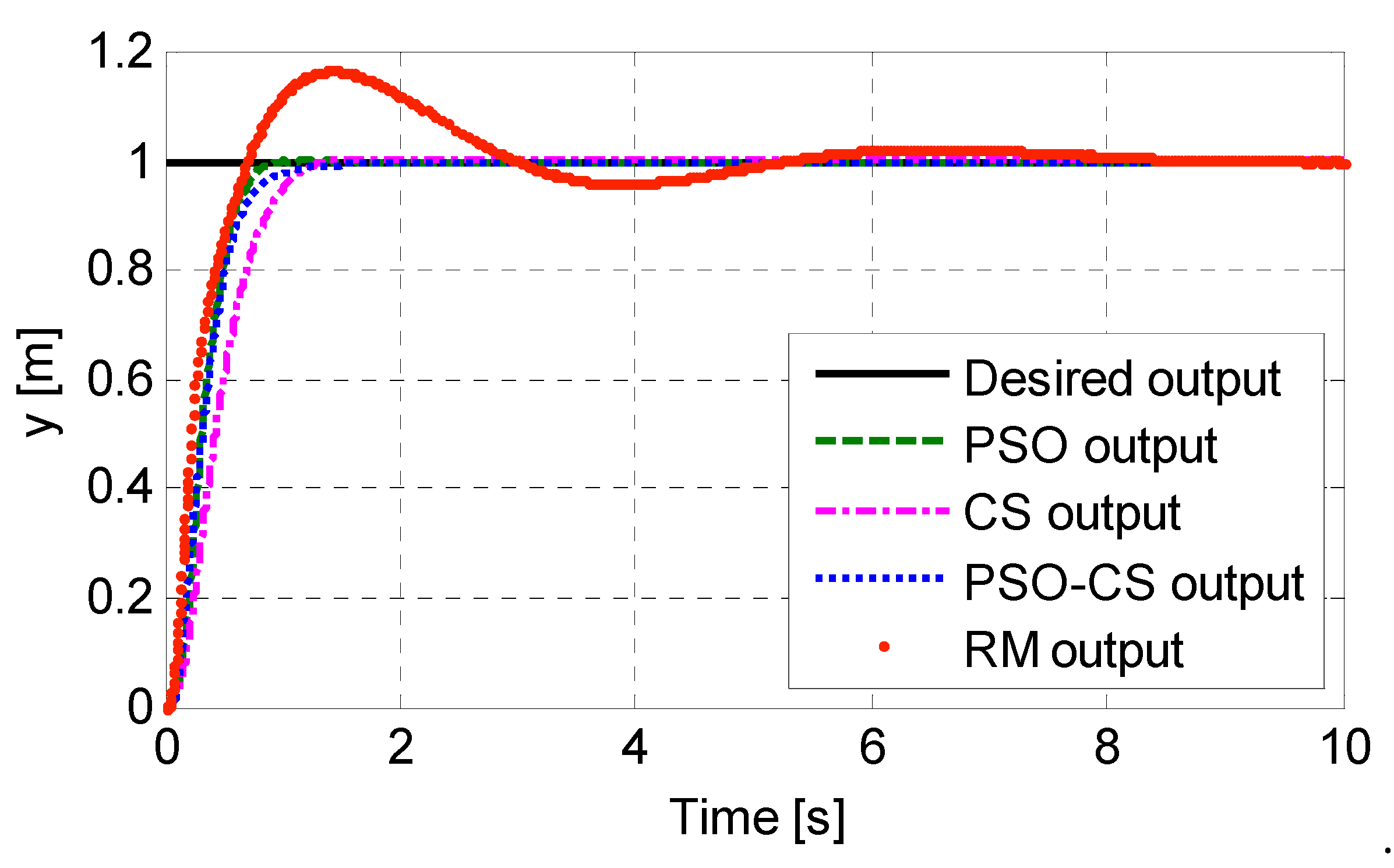
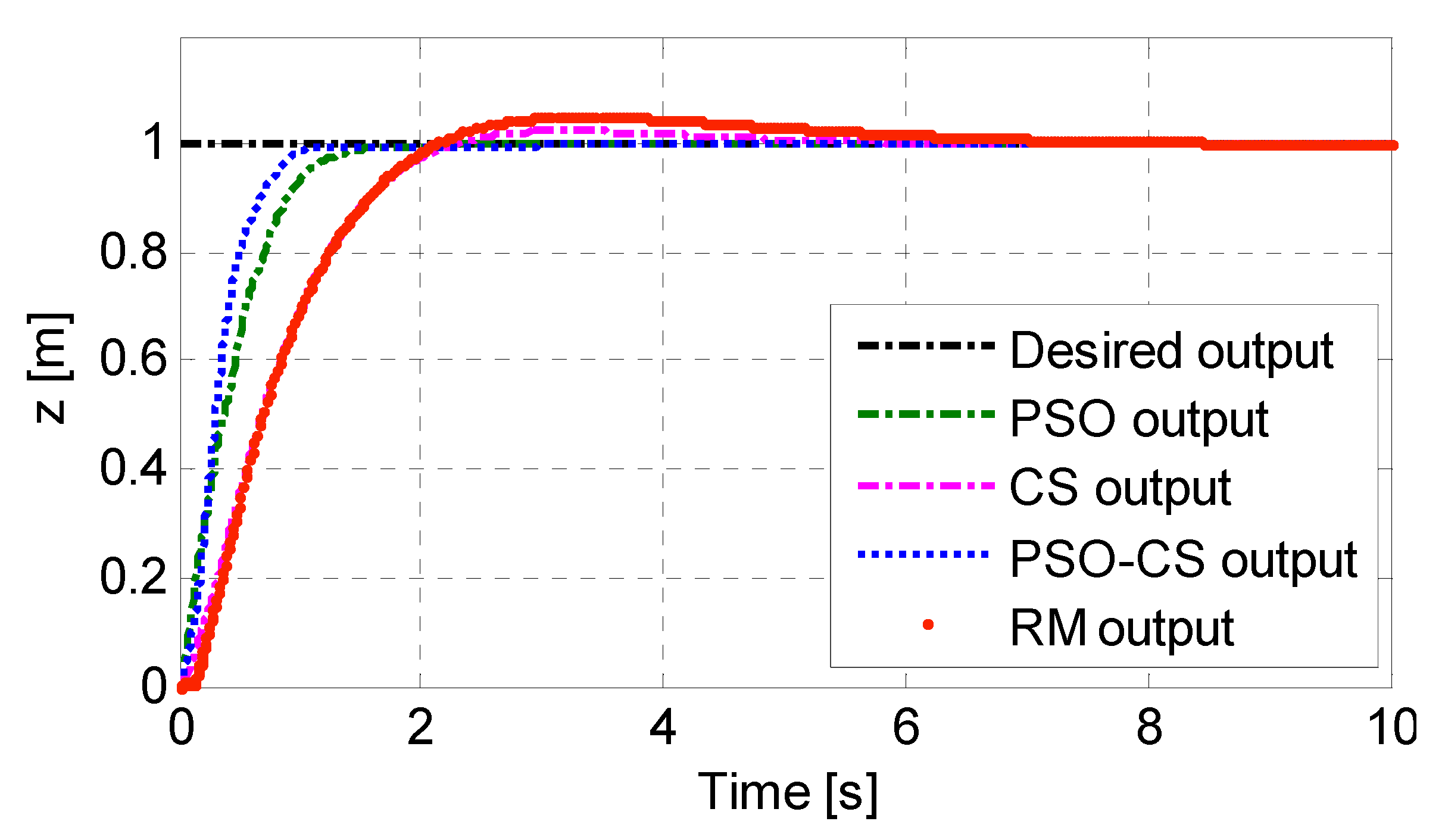
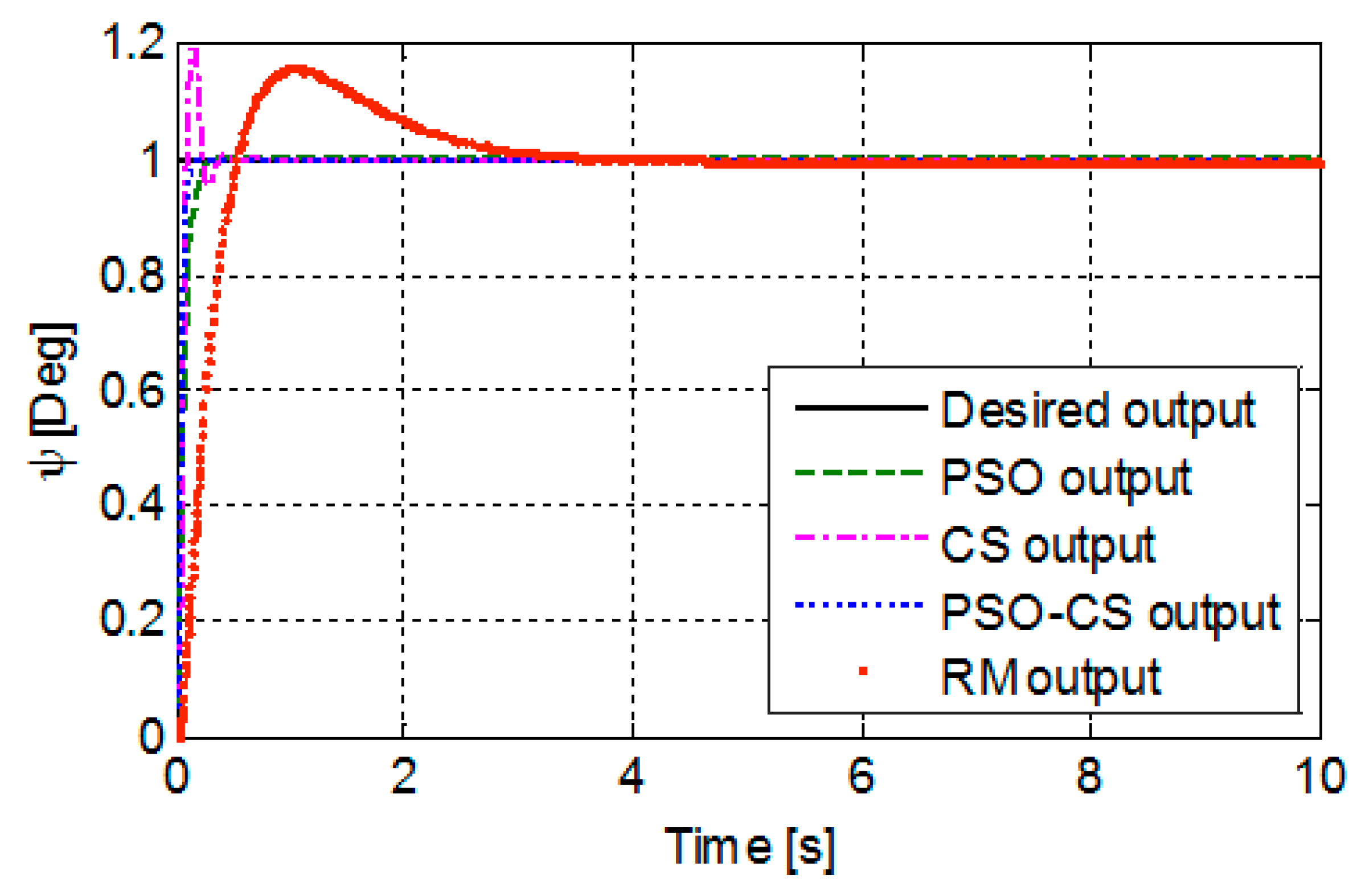
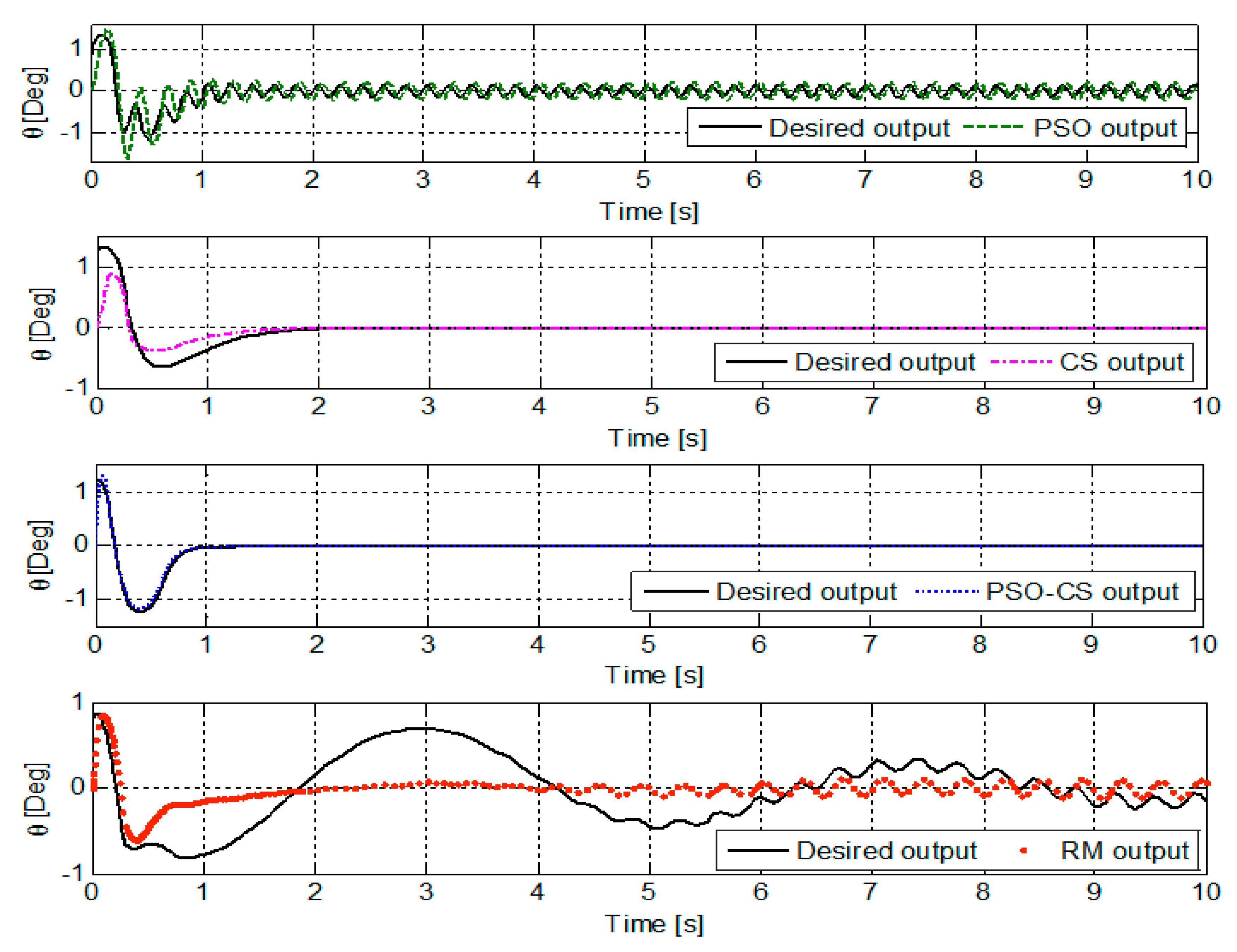
5.1. Comparisons of Intelligent and Classical Control Performances
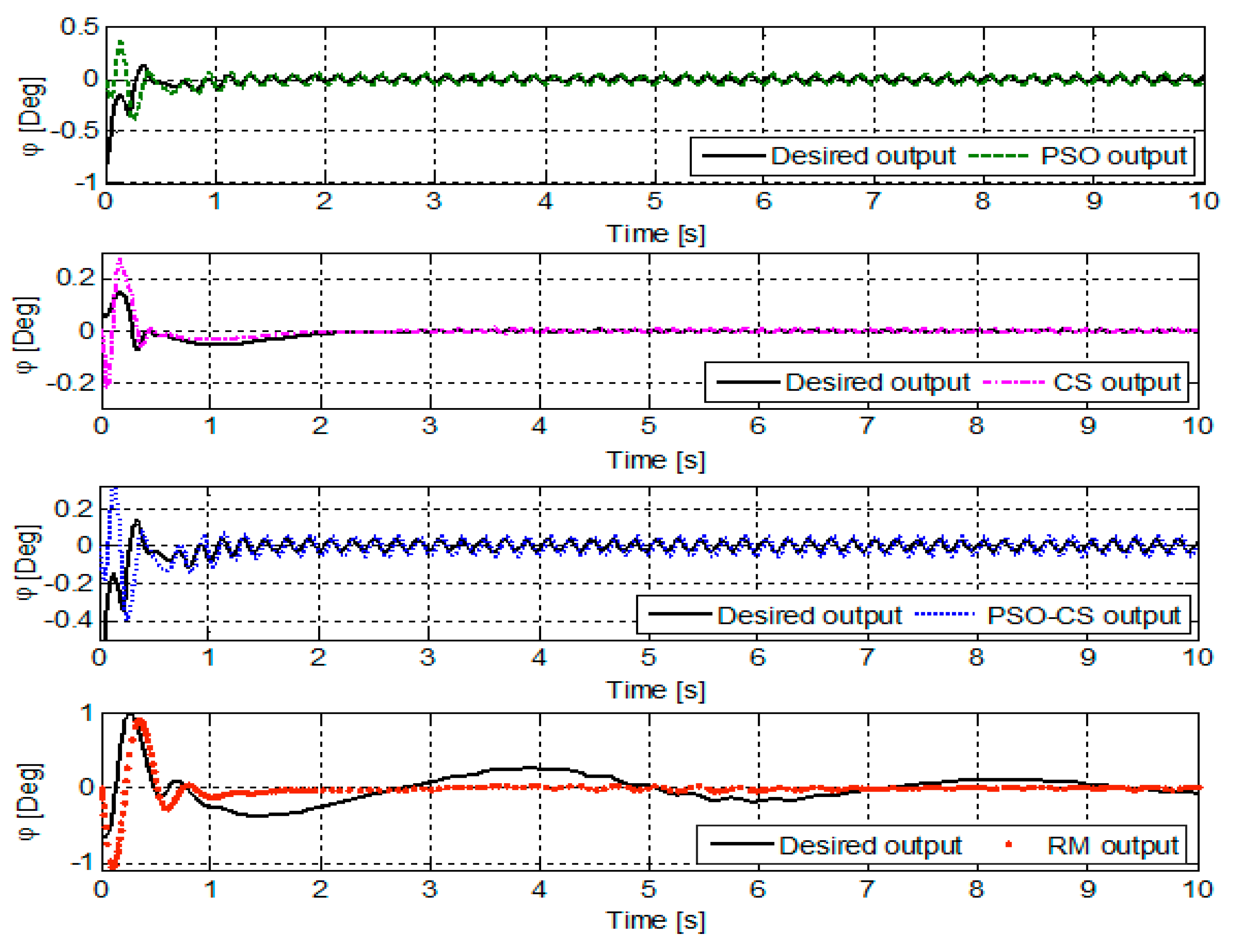
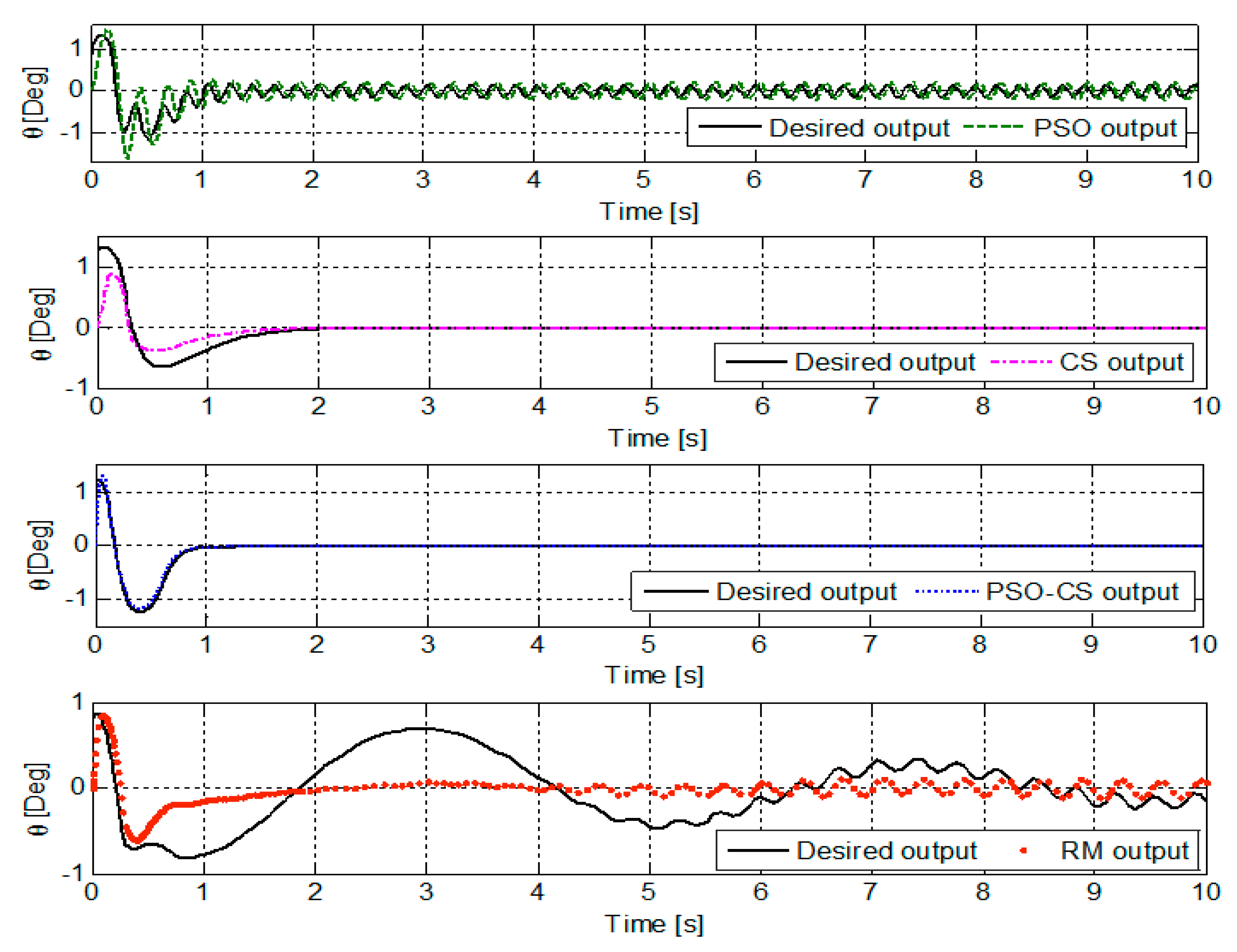
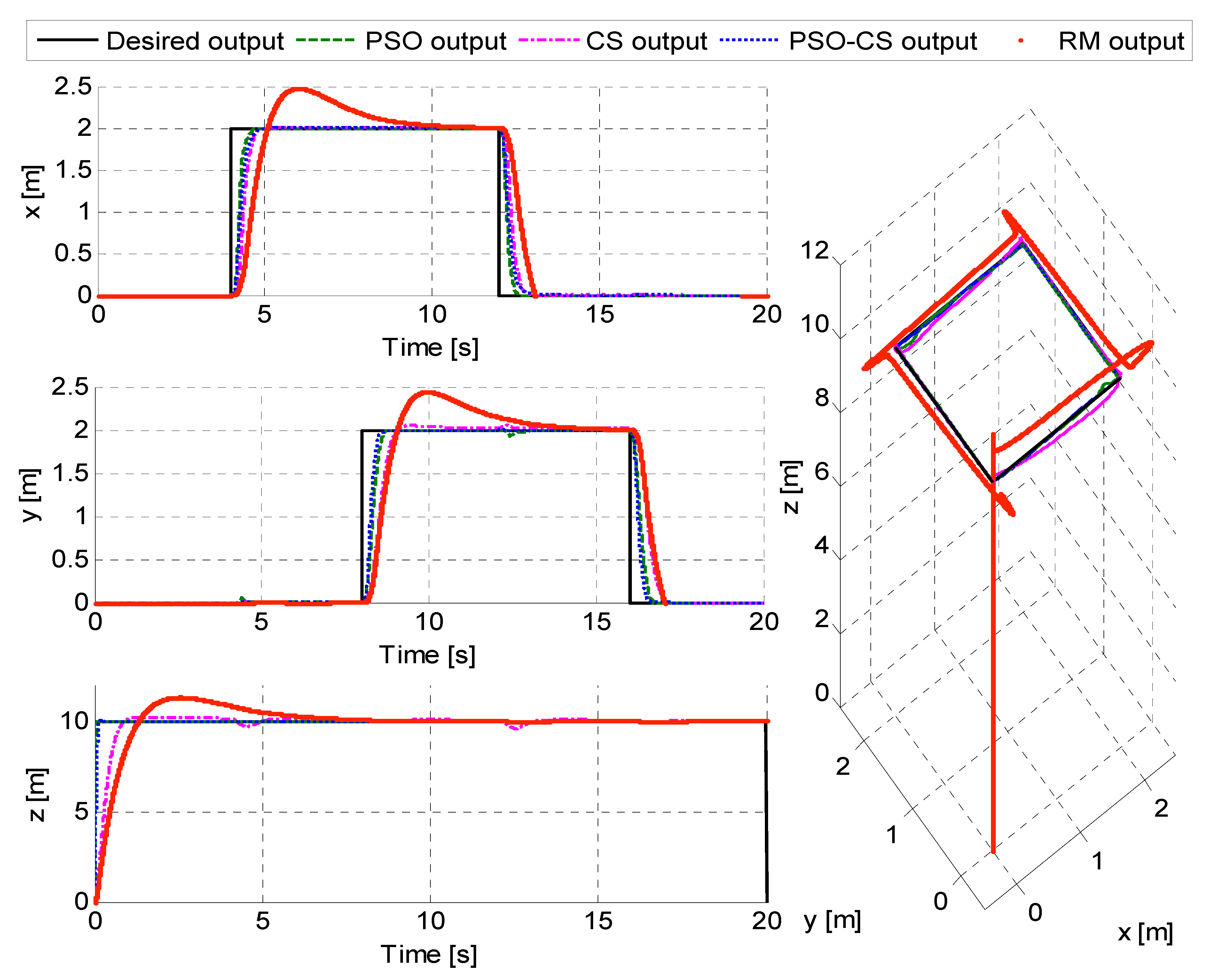
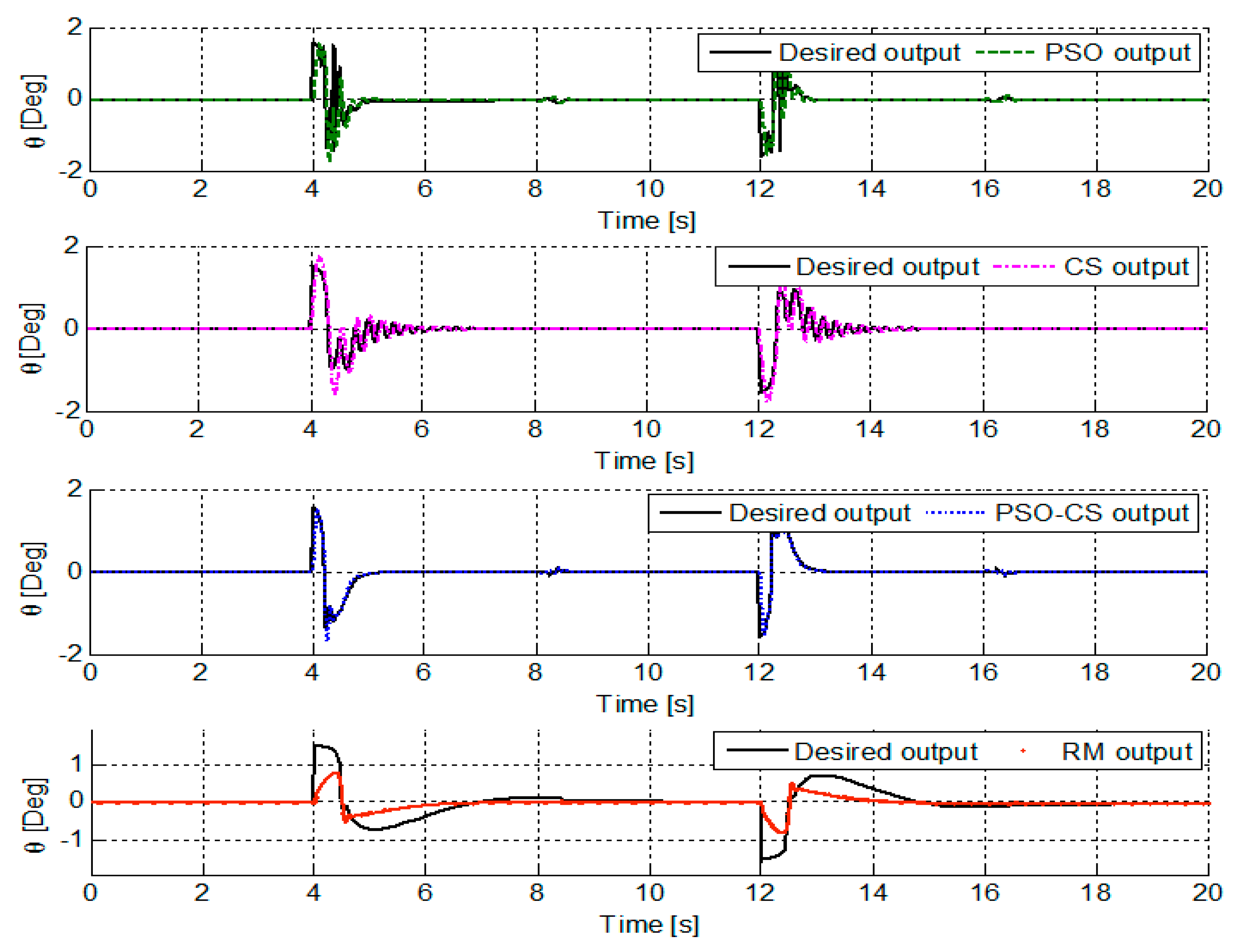
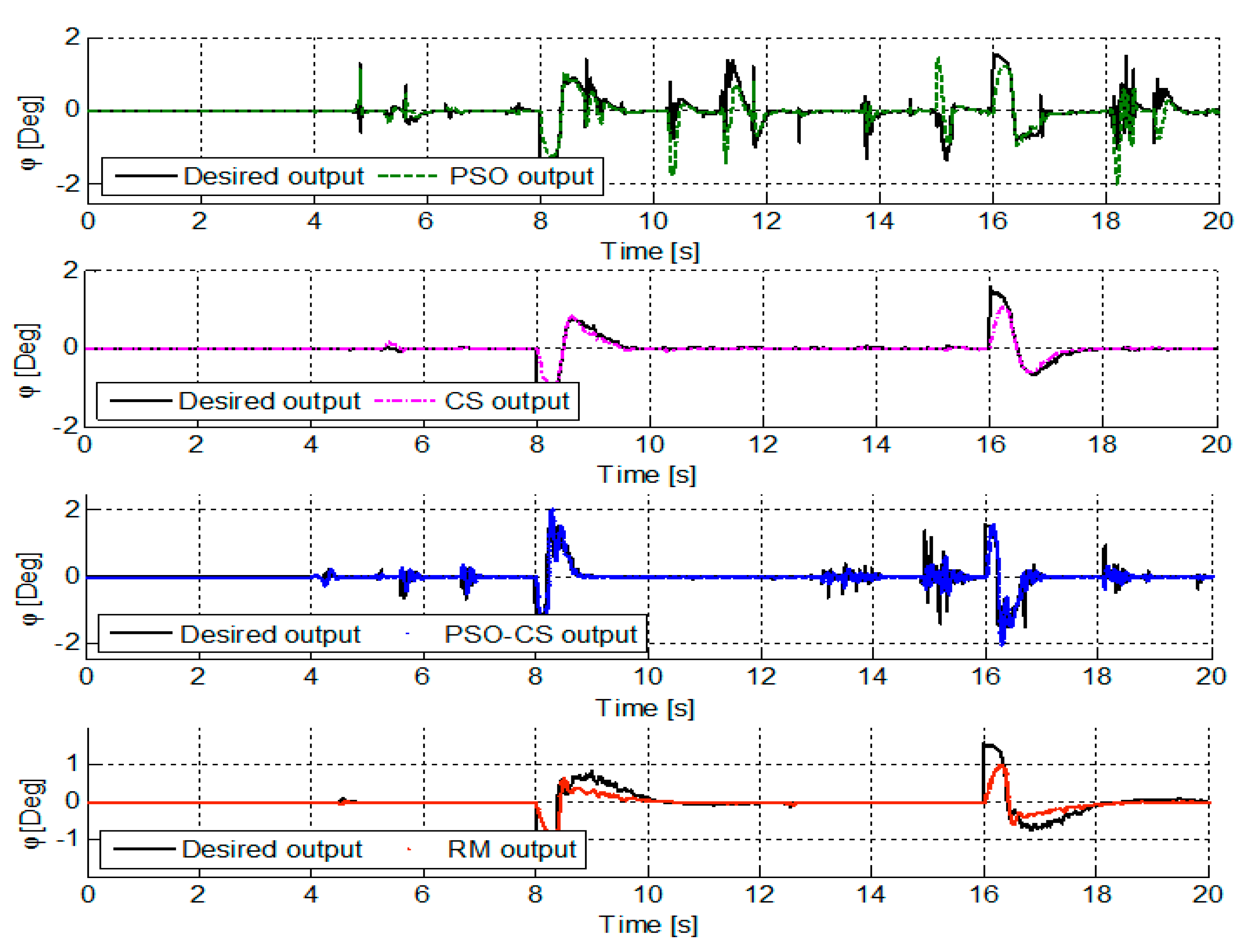
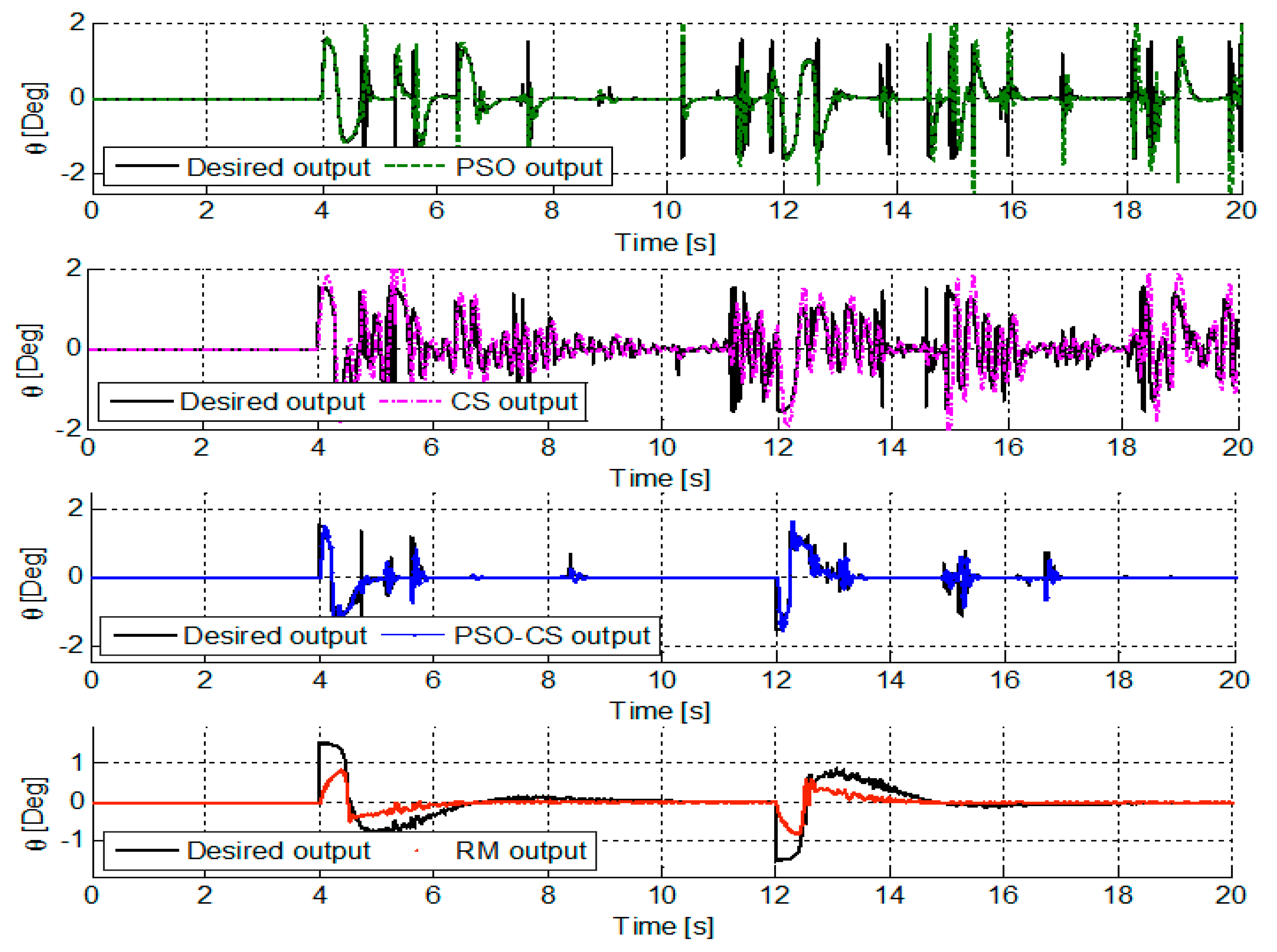
5.2. Rectangular Trajectory Tracking
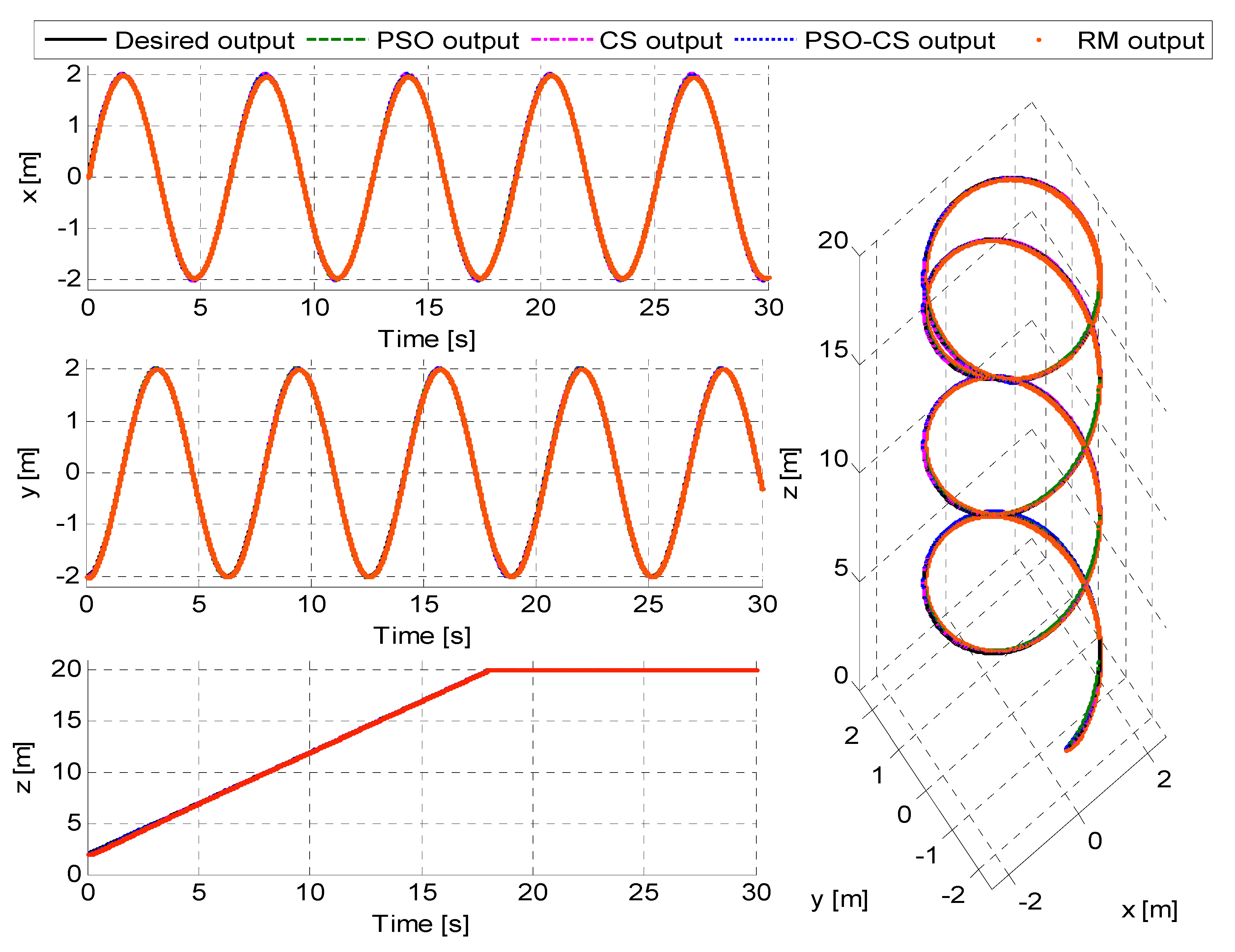
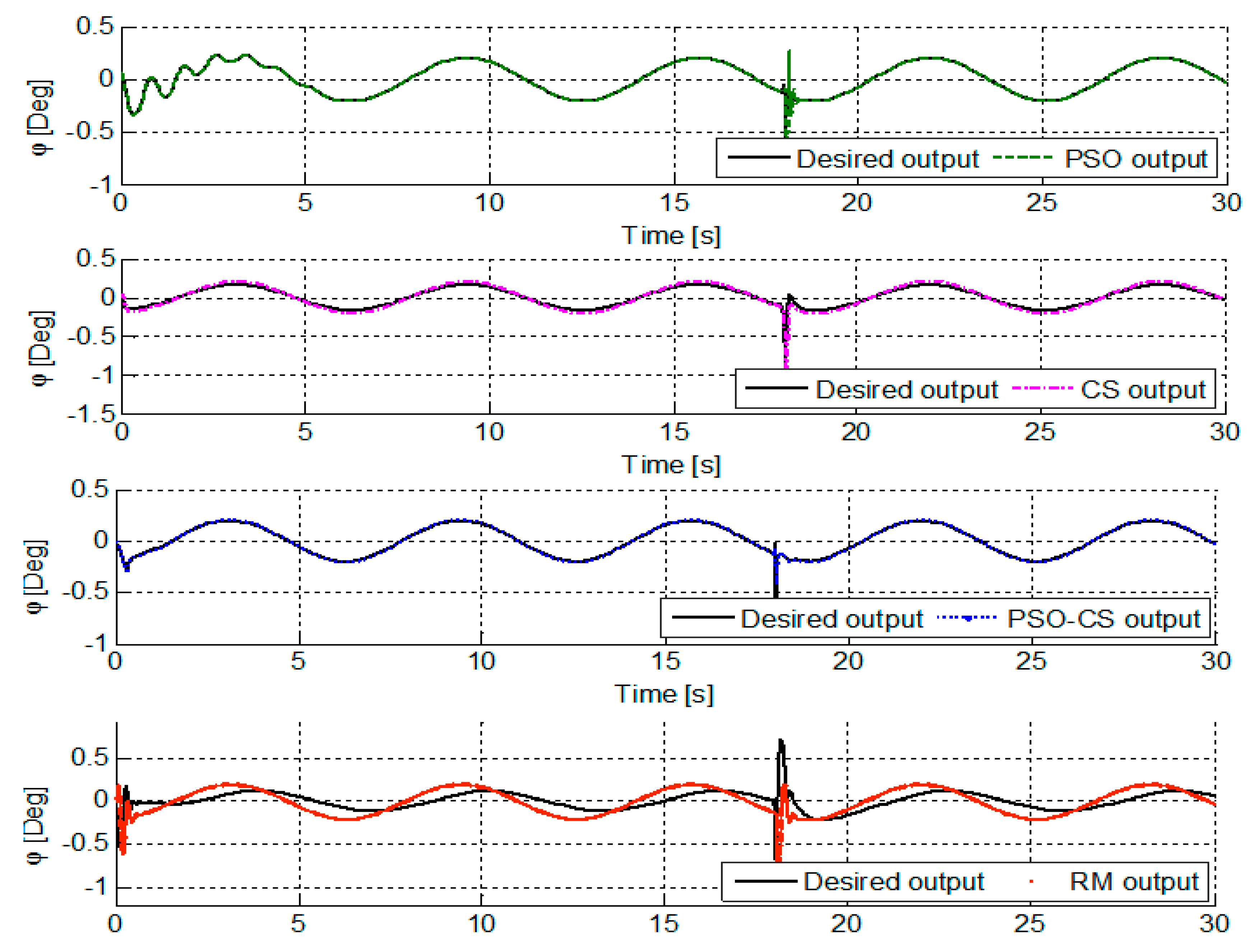
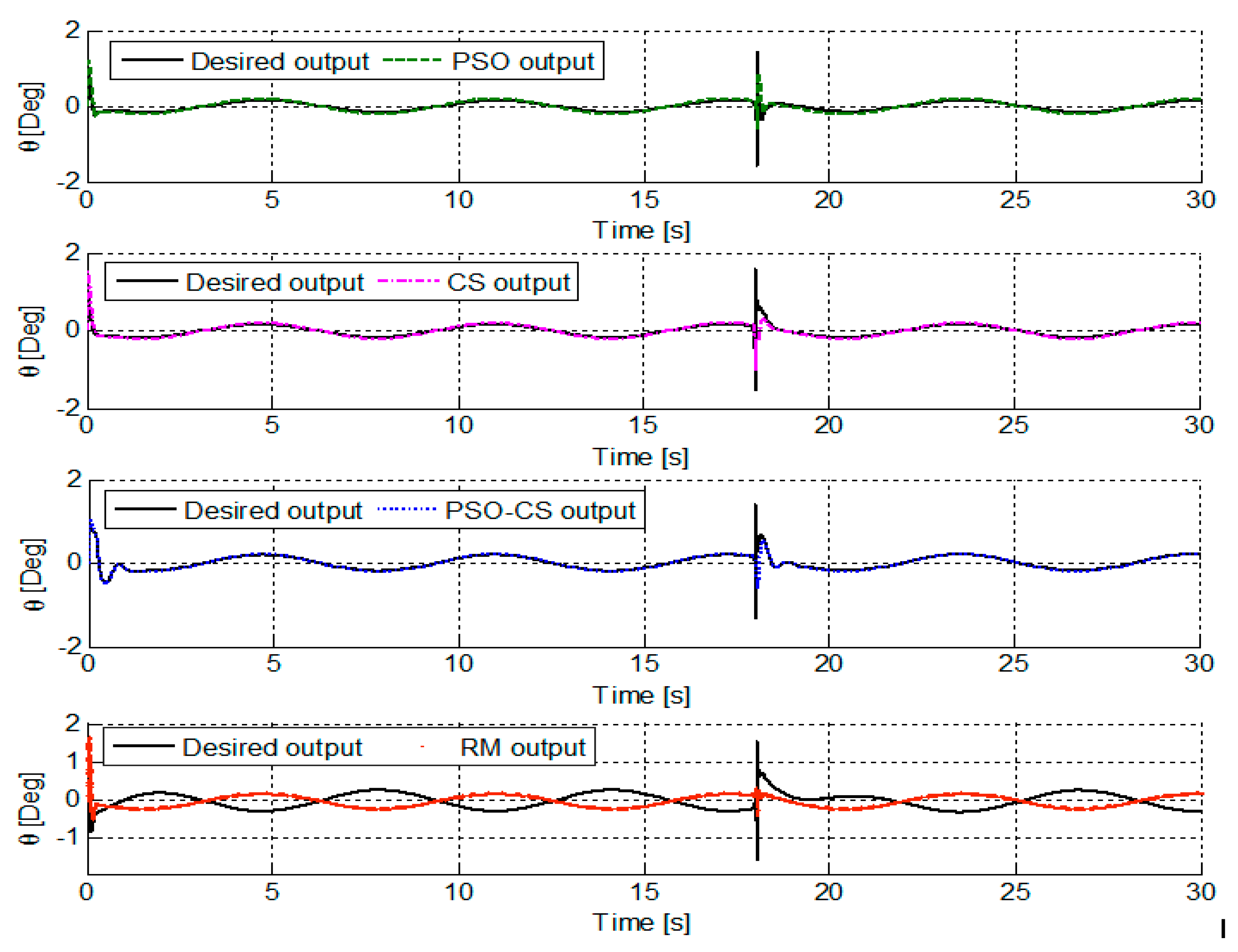
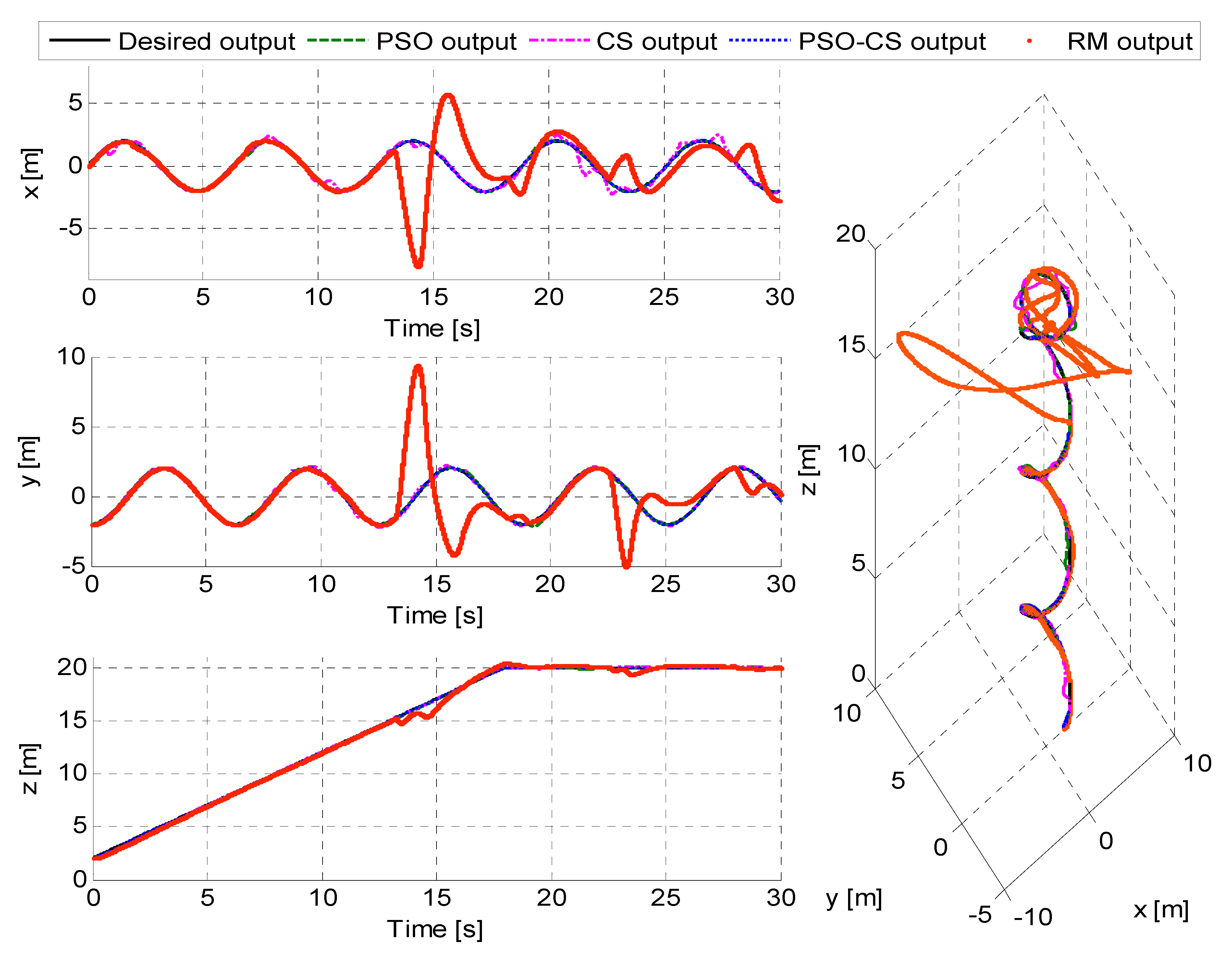
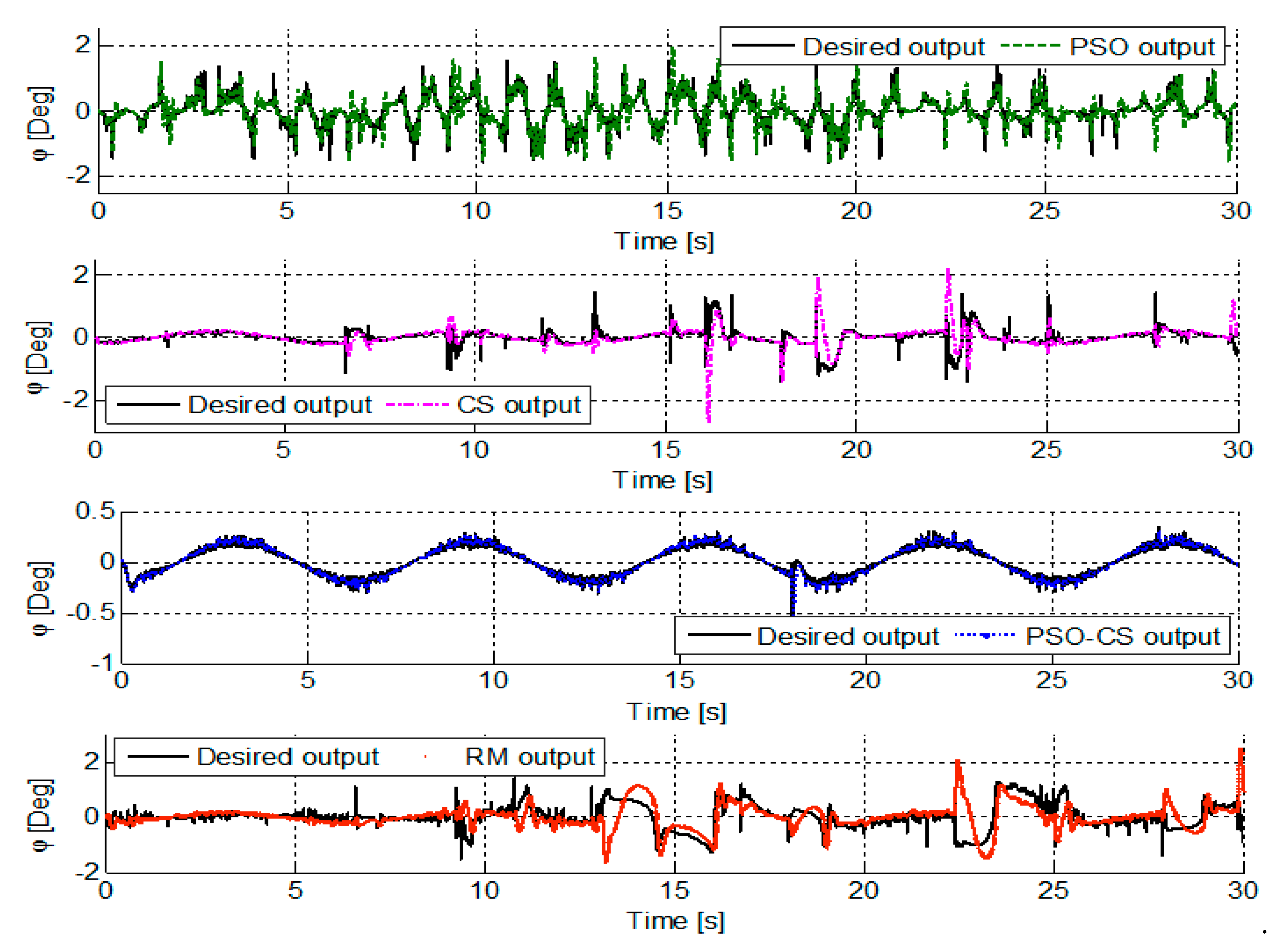
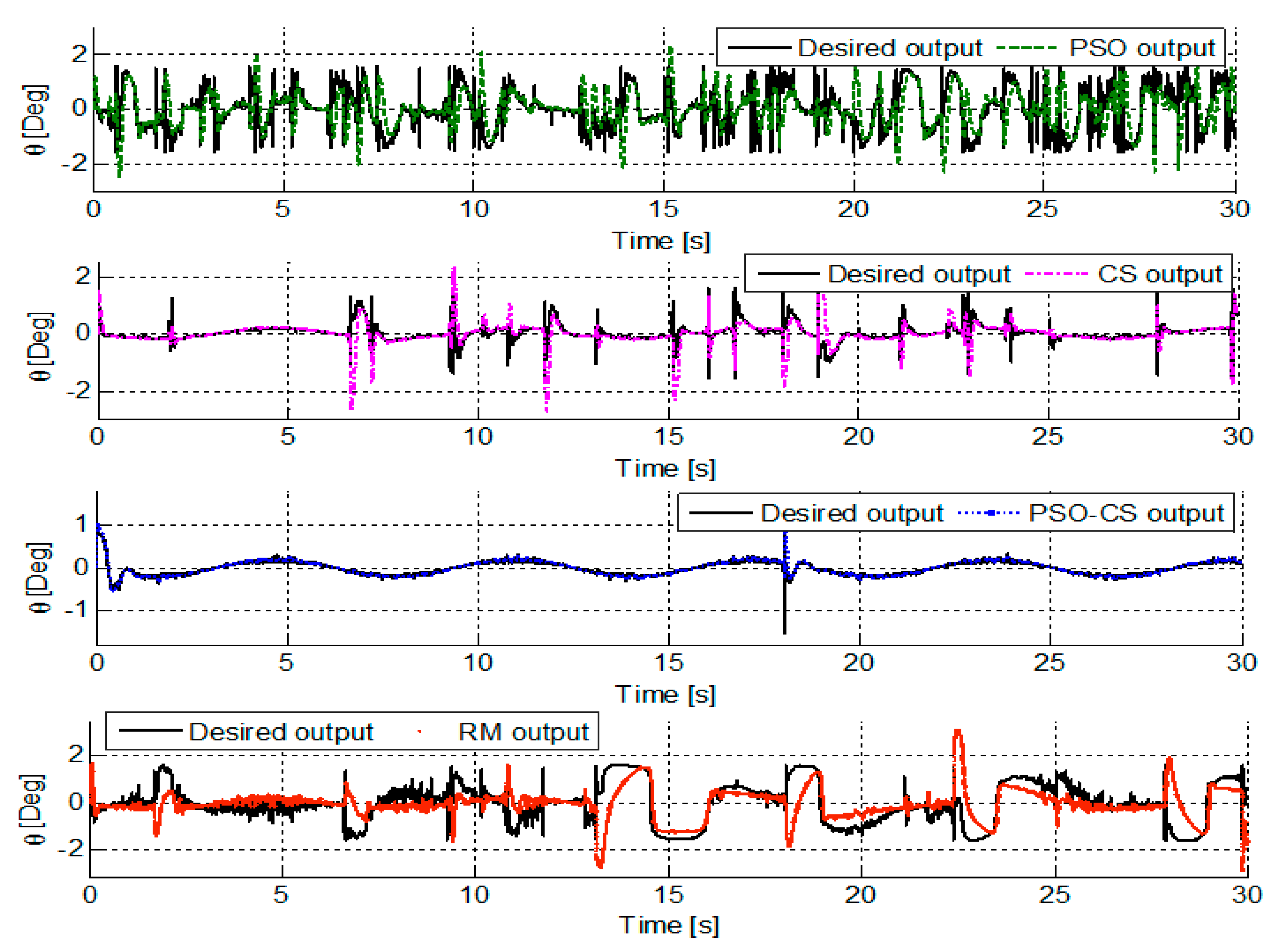
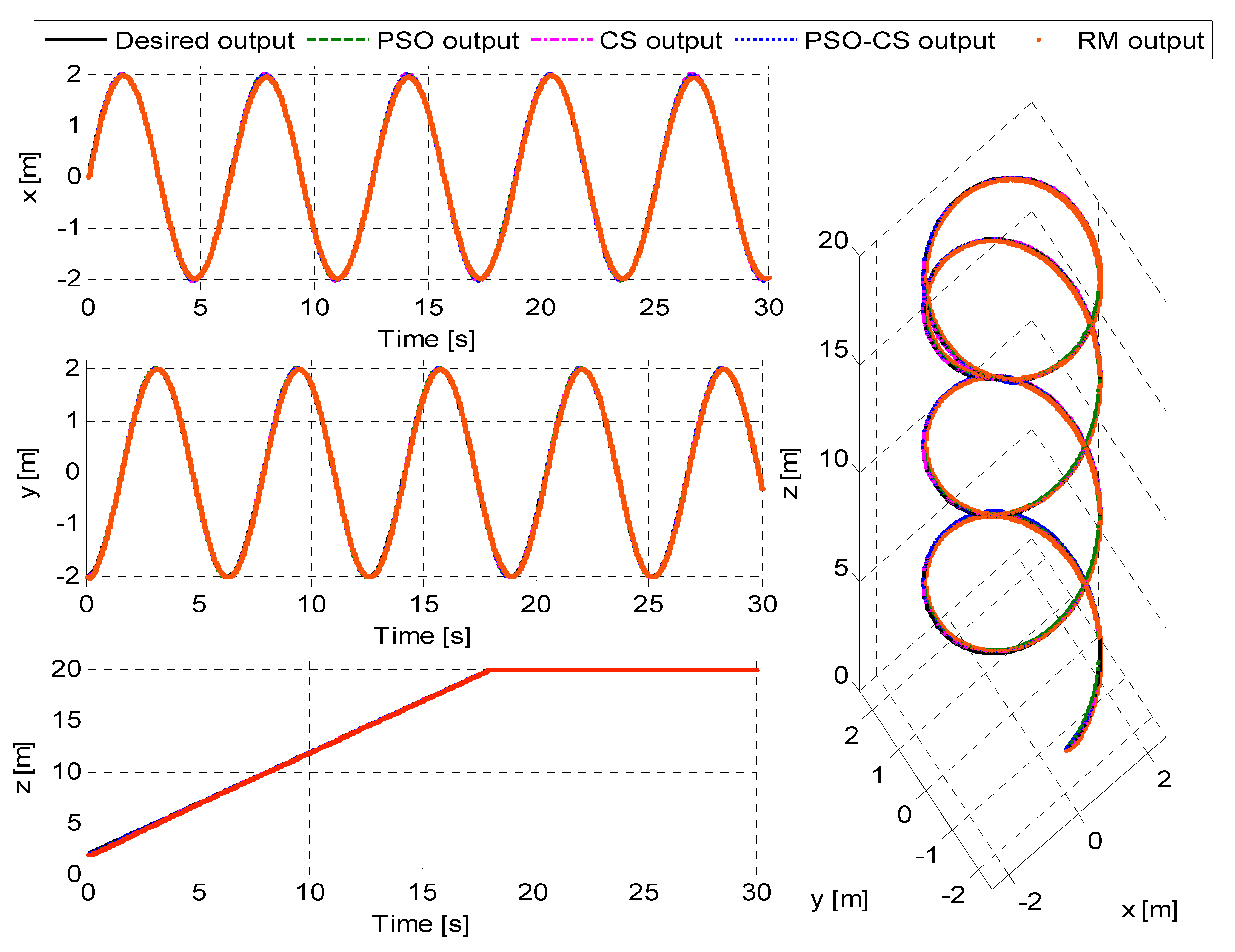
5.3. Helical Trajectory Tracking
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ACS | Adaptive Cuckoo Search |
| CS | Cuckoo Search |
| ISE | Integral Square Error |
| IAE | Integral Absolute Error |
| ITSE | Integral Time Square Error |
| ITAE | Integral Time Absolute Error |
| PI | Proportional and Integral |
| PID | Proportional, Integral and Derivative |
| PD | Proportional and Derivative |
| PSO | Particle Swarm Optimization |
| PSO-CS | Particle Swarm Optimization-Cuckoo Search |
| RM | Reference Model |
| UAV | Unmanned Aerial Vehicles |
References
- Bouabdallah, S.; Murrieri, P.; Siegwart, R. Design and control of an indoor micro quadrotor. In Proceedings of the IEEE International Conference in Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 4393–4398. [Google Scholar]
- Bouabdallah, S. Design and Control of Quadrotors with Application to Autonomous Flying. Ph.D. Dissertation, Ecole Polytechnique Federale de Lausanne, Lausanne, Suisse, 2007. [Google Scholar]
- Bouabdallah, S.; Noth, A.; Siegwart, R. PID vs. LQ control techniques applied to an indoor micro quadrotor. In Proceedings of the IEEE International Conference in Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; pp. 2451–2456. [Google Scholar]
- Naidoo, Y.; Stopforth, R.; Bright, G. Quadrotor Unmanned Aerial Vehicle Helicopter Modelling & Control. Int. J. Adv. Robot. Syst. 2011, 8, 139–149. [Google Scholar]
- Besnard, L.; Shtessel, Y.B.; Landrum, B. Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer. J. Frankl. Inst. 2012, 349, 658–684. [Google Scholar] [CrossRef]
- Honglei, A.; Jie, L.; Jian, W.; Jianwen, W.; Hongxu, M. Backstepping-based inverse optimal attitude control of quadrotor. Int. J. Adv. Robot. Syst. 2013, 10, 9. [Google Scholar] [CrossRef]
- Amin, R.; Aijun, L.; Shamshirband, S. A review of quadrotor UAV: Control methodologies and performance evaluation. Int. J. Autom. Control 2016, 10, 87–103. [Google Scholar] [CrossRef]
- Astrom, K.J. PID Controllers: Theory, Design and Tuning; Instrument Society of America: Research Triangle Park, NC, USA, 1995. [Google Scholar]
- Salih, A.L.; Moghavvemi, M.; Mohamed, H.; Gaeid, K.S. Flight PID controller design for a UAV quadrotor. Sci. Res. Essays 2010, 5, 3660–3667. [Google Scholar]
- Junior, J.C.V.; De Paula, J.C.; Leandro, G.V.; Bonfim, M.C. Stability control of a quadrotor using a PID controller. J. Appl. Instrum. Control 2013, 1, 15–20. [Google Scholar]
- Astrom, K.J.; Hagglund, T. Revisiting the Ziegler-Nichols step response method for PID control. J. Process Control 2004, 14, 635–650. [Google Scholar] [CrossRef]
- Graham, D.; Lathrop, R.C. The synthesis of optimum transient response: Criteria and standard forms. Trans. AIEE 1953, 72, 273–288. [Google Scholar] [CrossRef]
- Naslin, P. Essentials of Optimal Control; Iliffe & Sons Ltd.: London, UK, 1968. [Google Scholar]
- Mjahed, M. Control of Systems; Royal School of Aeronautics: Marrakech, Morocco, 2016. [Google Scholar]
- El gmili, N.; Mjahed, M.; EL Kari, A.; Ayad, H. An Improved Particle Swarm Optimization (IPSO) Approach for Identification and Control of Stable and Unstable Systems. Int. Rev. Autom. Control 2017, 10, 229–239. [Google Scholar] [CrossRef]
- Siti, I.; Mjahed, M.; El Kari, A.; Ayad, H. New Designing Approaches for Quadcopter PID Controllers Using Reference Model and Genetic Algorithm Techniques. Int. Rev. Autom. Control 2017, 10, 240–248. [Google Scholar] [CrossRef]
- Mjahed, M. Optimization of classification tasks by using genetic algorithms. In Proceedings of the 7th IEEE International Conference on Informatics and Systems, Cairo, Egypt, 28–30 March 2010; pp. 1–4. [Google Scholar]
- Kennedy, J.; Eberhart, R.C. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Mohan, B.C.; Baskaran, R. A survey: Ant colony optimization based recent research and implementation on several engineering domain. Expert Syst. Appl. 2012, 39, 4618–4627. [Google Scholar]
- Karaboga, D.; Gorkemli, B.; Ozturk, C.; Karaboga, N. A comprehensive survey: Artificial bee colony (ABC) algorithm and applications. Artif. Intell. Rev. 2014, 42, 21–57. [Google Scholar]
- Joshi, A.S.; Kulkarni, O.; Kakandikar, G.M.; Nandedkar, V.M. Cuckoo Search Optimization—A Review. Mater. Today Proc. 2017, 4, 7262–7269. [Google Scholar] [CrossRef]
- Kamoona, A.M.; Patra, J.C.; Stojcevski, A. An Enhanced Cuckoo Search Algorithm for Solving Optimization Problems. In Proceedings of the IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–6. [Google Scholar]
- Chaine, S.; Tripathy, M. Design of an optimal SMES for automatic generation control of two-area thermal power system using cuckoo search algorithm. J. Electr. Syst. Inf. Technol. 2015, 2, 1–13. [Google Scholar] [CrossRef]
- Zamani, A.A.; Tavakoli, S.; Etedali, S. Fractional order PID control design for semi-active control of smart base-isolated structures: A multi-objective cuckoo search approach. ISA Trans. 2017, 67, 222–232. [Google Scholar] [CrossRef] [PubMed]
- Sona, D.R. PSO algorithm in quadcopter cluster for unified trajectory planning using wireless ad hoc network. In Proceedings of the International Conference on Soft Computing Systems; Springer: New Delhi, India, 2015; pp. 819–826. [Google Scholar]
- Noordin, A.; Basri, M.A.M.; Mohamed, Z.; Abidin, A.F.Z. Modelling and PSO Fine-tuned PID Control of Quadrotor UAV. Int. J. Adv. Sci. Eng. Inf. Technol. 2017, 7, 1367–1373. [Google Scholar] [CrossRef]
- Abbas, N.H.; Sami, A.R. Tuning of PID Controllers for Quadcopter System using Hybrid Memory based Gravitational Search Algorithm–Particle Swarm Optimization. Int. J. Comput. Appl. 2018, 172, 80–99. [Google Scholar]
- Naik, M.; Nath, M.R.; Wunnava, A.; Sahany, S.; Panda, R. A new adaptive Cuckoo search algorithm. In Proceedings of the 2nd International Conference on Recent Trends in Information Systems (ReTIS), Kolkata, India, 9–11 July 2015; pp. 1–5. [Google Scholar]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Dréo, J.; Siarry, P. Métaheuristiques pour L’optimisation Difficile; Eyrolles: Paris, France, 2003. [Google Scholar]
- El Hamidi, K.; Mjahed, M.; El Kari, A.; Ayad, H. Neural and Fuzzy Based Nonlinear Flight Control for an Unmanned Quadcopter. Int. Rev. Autom. Control 2018, 11, 98–106. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (unit) | Value |
|---|---|
| m (Kg) | 0.65 |
| g (m/s2) | 9.806 |
| l (m) | 0.4 |
| b (N/rad/s) | 2.9842 × 10−5 |
| d (N.m/rad/s) | 7.5 × 10−7 |
| Ix, Iy (Kg.m2) | 7.5 × 10−3 |
| Iz (Kg.m2) | 1.3 × 10−3 |
| Jr (Kg.m2) | 2.8385 × 10−5 |
| Kfax, Kfay (N/rad/s) | 5.567 × 10−4 |
| Kfaz (N/rad/s) | 6.354 × 10−4 |
| Kftx, Kfty(N/rad/s) | 5.567 × 10−4 |
| Kftz (N/rad/s) | 3.354 ×10−4 |
| Initial Conditions | Trajectory Description | Attitude’s Saturation | |
|---|---|---|---|
| Rectangular Trajectory | [ϕ, θ, ψ, x, y, z] = [0, 0, 0, 0, 0, 10] | −90° < ϕ, θ < 90 | |
| Helical Trajectory | [ϕ, θ, ψ, x, y, z] = [0, 0, 0, 0, 0, 2] |
| Quadrotor’s Output | Optimal PID Gains | |||||
|---|---|---|---|---|---|---|
| PSO | CS | |||||
| Kp | Ki | Kd | Kp | Ki | Kd | |
| x | 42.829 | 0.167 | 12.366 | 27.345 | 0.865 | 14.023 |
| y | 62.881 | 0.226 | 16.065 | 36.714 | 0.505 | 14.056 |
| z | 34.545 | 14.508 | 9.498 | 14.756 | 8.647 | 8.077 |
| ϕ | 14.740 | 1.749 | 0.975 | 17.948 | 0.178 | 1.055 |
| θ | 13.872 | 0.809 | 0.555 | 19.430 | 0.867 | 1.806 |
| ψ | 15.299 | 0.702 | 0.994 | 7.967 | 0.198 | 0.278 |
| PSO-CS | RM | |||||
| Kp | Ki | Kd | Kp | Ki | Kd | |
| x | 69.822 | −0.011 | 16.974 | 59.150 | 29.250 | 30.550 |
| y | 45.880 | 0.008 | 15.067 | 39.650 | 19.500 | 20.800 |
| z | 31.859 | 17.724 | 6.715 | 26.066 | 10.394 | 16.865 |
| ϕ | 206.617 | 3.941 | 1.493 | 2.739 | 2.608 | 0.783 |
| θ | 121.842 | −1.648 | 2.217 | 3.293 | 1.630 | 1.695 |
| ψ | 38.469 | 0.469 | 1.466 | 1.092 | 1.040 | 0.31 |
| Output | Performances | Method | |||
|---|---|---|---|---|---|
| PSO | CS | PSO-CS | RM | ||
| x | Ts (s) | 0.730 | 1.384 | 0.522 | 3.779 |
| Mp (%) | 0.412 | 1.769 | 0.446 | 22.869 | |
| ISE | 0.227 | 0.346 | 0.1650 | 0.365 | |
| IAE | 0.324 | 0.492 | 0.234 | 0.714 | |
| ITSE | 0.034 | 0.083 | 0.018 | 0.176 | |
| ITAE | 0.088 | 0.262 | 0.038 | 0.847 | |
| y | Ts (s) | 0.675 | 1.018 | 0.782 | 3.517 |
| Mp (%) | 0.497 | 0.898 | 0.010 | 30.741 | |
| ISE | 0.237 | 0.296 | 0.226 | 0.441 | |
| IAE | 0.322 | 0.410 | 0.319 | 0.802 | |
| ITSE | 0.036 | 0.058 | 0.034 | 0.245 | |
| ITAE | 0.083 | 0.152 | 0.076 | 0.954 | |
| z | Ts (s) | 1.070 | 1.821 | 0.813 | 1.855 |
| Mp (%) | 0.107 | 2.463 | 0.002 | 3.467 | |
| ISE | 0.243 | 0.406 | 0.208 | 0.342 | |
| IAE | 0.397 | 0.587 | 0.308 | 0.617 | |
| ITSE | 0.050 | 0.129 | 0.031 | 0.122 | |
| ITAE | 0.134 | 0.312 | 0.081 | 0.521 | |
| ϕ | ISE | 0.028 | 0.006 | 0.005 | 0.093 |
| IAE | 0.197 | 0.053 | 0.032 | 0.431 | |
| ITSE | 0.016 | 0.001 | 0.000 | 0.076 | |
| ITAE | 0.388 | 0.036 | 0.013 | 0.741 | |
| θ | ISE | 0.334 | 0.129 | 0.024 | 0.912 |
| IAE | 0.886 | 0.271 | 0.068 | 1.509 | |
| ITSE | 0.386 | 0.026 | 0.001 | 1.238 | |
| ITAE | 2.006 | 0.134 | 0.023 | 2.822 | |
| ψ | Ts (s) | 0.172 | 0.207 | 0.097 | 2.228 |
| Mp (%) | 0.300 | 20.424 | 0.047 | 16.129 | |
| ISE | 0.036 | 0.037 | 0.022 | 0.138 | |
| IAE | 0.073 | 0.068 | 0.038 | 0.331 | |
| ITSE | 0.0012 | 0.012 | 0.000 | 0.033 | |
| ITAE | 0.038 | 0.011 | 0.006 | 0.244 | |
| Method | Errors ISE for Output | |||||
|---|---|---|---|---|---|---|
| x | y | z | ϕ | θ | ψ | |
| PSO | 1.083 | 0.677 | 3.287 | 0.119 | 0.093 | 7.586 × 10−36 |
| CS | 1.447 | 1.327 | 21.46 | 0.152 | 0.318 | 1.001 × 10−35 |
| PSO-CS | 0.955 | 0.795 | 1.453 | 0.107 | 0.4022 | 1.651 × 10−36 |
| RM | 2.573 | 1.561 | 33.756 | 0.277 | 0.712 | 1.210 × 10−34 |
| Method | Errors ISE for Output | |||||
|---|---|---|---|---|---|---|
| x | y | z | ϕ | θ | ψ | |
| PSO | 1.254 | 1.161 | 14.212 | 0.524 | 0.982 | 1.056 × 10−28 |
| CS | 1.498 | 1.334 | 21.612 | 0.147 | 2.441 | 7.378 × 10−35 |
| PSO-CS | 1.079 | 0.685 | 3.287 | 0.183 | 0.195 | 8.157 × 10−36 |
| RM | 2.555 | 1.573 | 33.776 | 0.272 | 0.704 | 5.467 × 10−35 |
| Method | ISE Errors for Output | |||||
|---|---|---|---|---|---|---|
| x | y | z | ϕ | θ | ψ | |
| PSO | 0.006 | 0.013 | 0.069 | 0.010 | 0.069 | 7.540 × 10−38 |
| CS | 0.013 | 0.005 | 0.121 | 0.023 | 0.089 | 6.982 × 10−36 |
| PSO-CS | 0.011 | 0.010 | 0.007 | 0.001 | 0.033 | 7.495 × 10−35 |
| RM | 0.006 | 0.004 | 0.08 | 0.238 | 1.565 | 1.954 × 10−34 |
| Method | ISE Errors for Output | |||||
|---|---|---|---|---|---|---|
| x | y | z | ϕ | θ | ψ | |
| PSO | 0.072 | 0.048 | 0.163 | 1.079 | 2.606 | 2.001 × 10−34 |
| CS | 0.756 | 0.188 | 0.172 | 1.155 | 6.084 | 3.721 × 10−36 |
| PSO-CS | 0.009 | 0.009 | 0.007 | 0.010 | 0.023 | 1.128 × 10−35 |
| RM | 55.221 | 53.052 | 0.932 | 2.016 | 6.745 | 2.291 × 10−33 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Gmili, N.; Mjahed, M.; El Kari, A.; Ayad, H. Particle Swarm Optimization and Cuckoo Search-Based Approaches for Quadrotor Control and Trajectory Tracking. Appl. Sci. 2019, 9, 1719. https://doi.org/10.3390/app9081719
El Gmili N, Mjahed M, El Kari A, Ayad H. Particle Swarm Optimization and Cuckoo Search-Based Approaches for Quadrotor Control and Trajectory Tracking. Applied Sciences. 2019; 9(8):1719. https://doi.org/10.3390/app9081719
Chicago/Turabian StyleEl Gmili, Nada, Mostafa Mjahed, Abdeljalil El Kari, and Hassan Ayad. 2019. "Particle Swarm Optimization and Cuckoo Search-Based Approaches for Quadrotor Control and Trajectory Tracking" Applied Sciences 9, no. 8: 1719. https://doi.org/10.3390/app9081719
APA StyleEl Gmili, N., Mjahed, M., El Kari, A., & Ayad, H. (2019). Particle Swarm Optimization and Cuckoo Search-Based Approaches for Quadrotor Control and Trajectory Tracking. Applied Sciences, 9(8), 1719. https://doi.org/10.3390/app9081719