Image Recovery with Data Missing in the Presence of Salt-and-Pepper Noise


Abstract
1. Introduction
2. Formulations of Salt-and-Pepper Noise and Data Missing
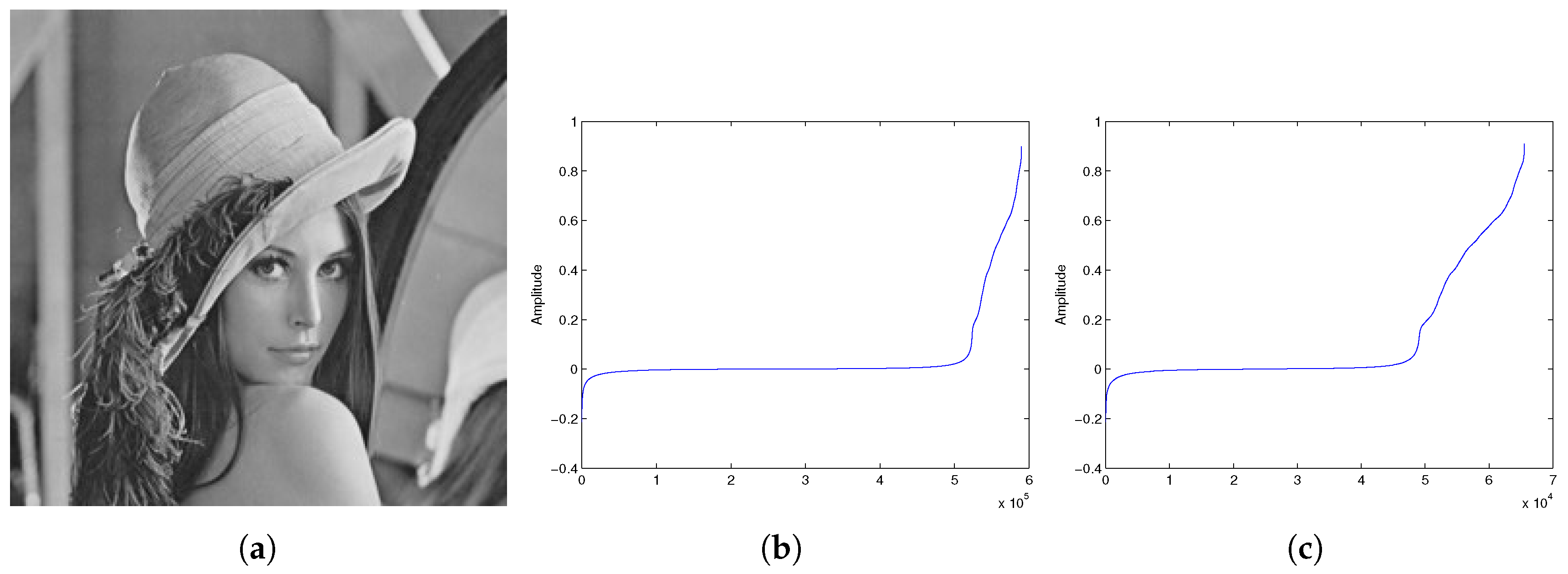
3. Transform Domains
3.1. Orthogonal Basis-Wavelet
3.2. Nonorthogonal Basis-Framelet
4. Problem Formulation and Algorithm Development
- : Solve Equation with the initialized/estimated missing pattern to obtain estimations of and aswhere is the initialized/estimated value of the missing pattern.
- : With the estimations from Step 1, solving Equation yields missing pattern estimation aswhere and denote the estimated values of and , respectively.
- Iterate Steps 1 and 2 until a stopping rule is met.
4.1. Alternating Direction Method of Multipliers (ADMM)
| Algorithm 1 Alternating Direction Method of Multipliers (ADMM) based approach. |
| Objective function: |
| Outputs: Estimates of , and |
| Initialization: Repeat |
| Step 1: Produce the estimate of by Equations – |
| Step 2: Produce the estimate of by Equations – |
| Step 2: Produce the estimate of by Equations and |
| Step 3: Update the residual |
| Until {maximum iteration} or {predefined threshold}. |
4.2. Accelerated Proximal Gradient (APG)
| Algorithm 2 Accelerated Proximal Gradient (APG) based approach. |
| Objective function: |
| Outputs: Estimates of , and |
| Initialization: , , , |
| Repeat |
| Until {maximum iteration} or {predefined threshold}. |
5. Numerical Studies
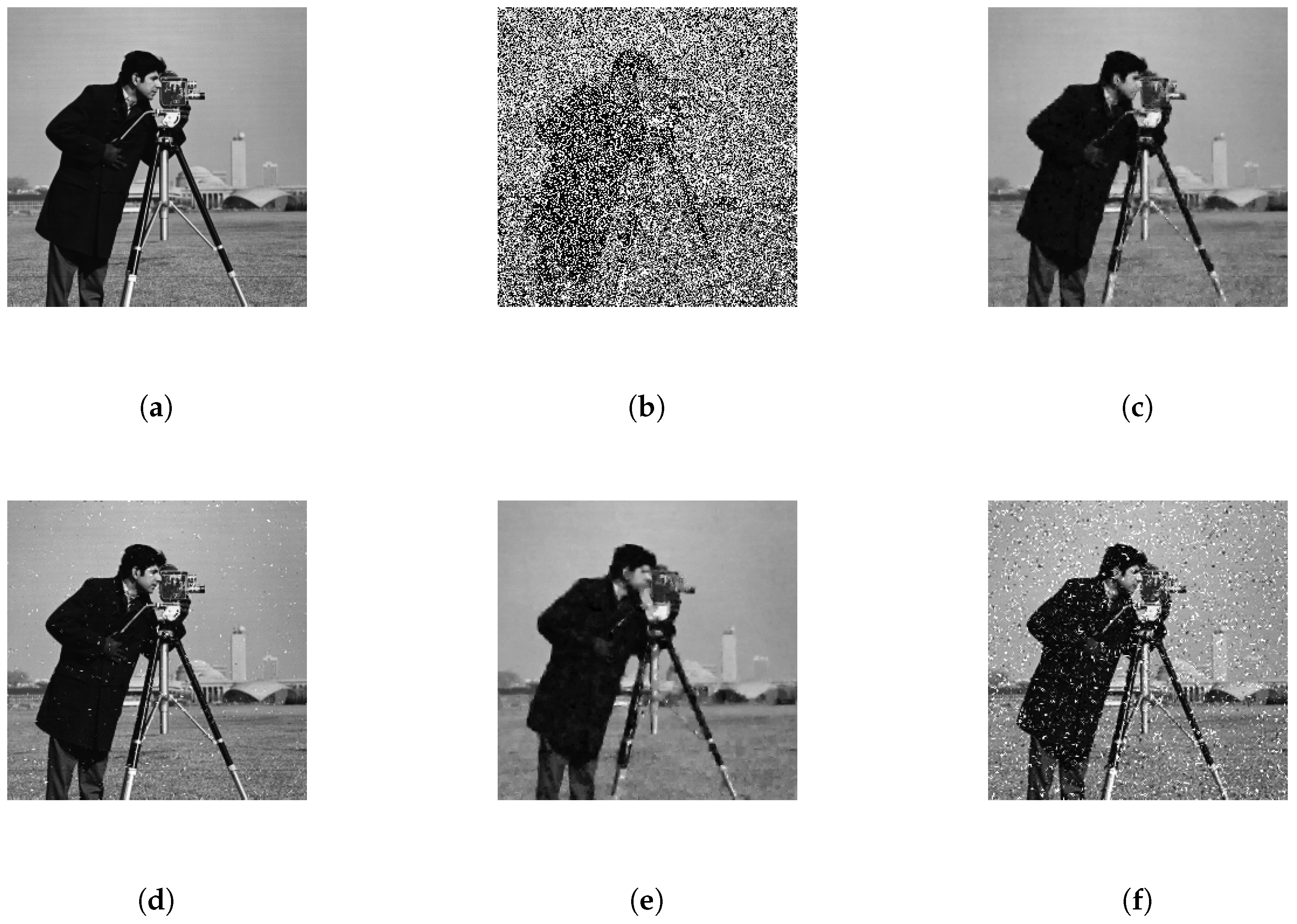
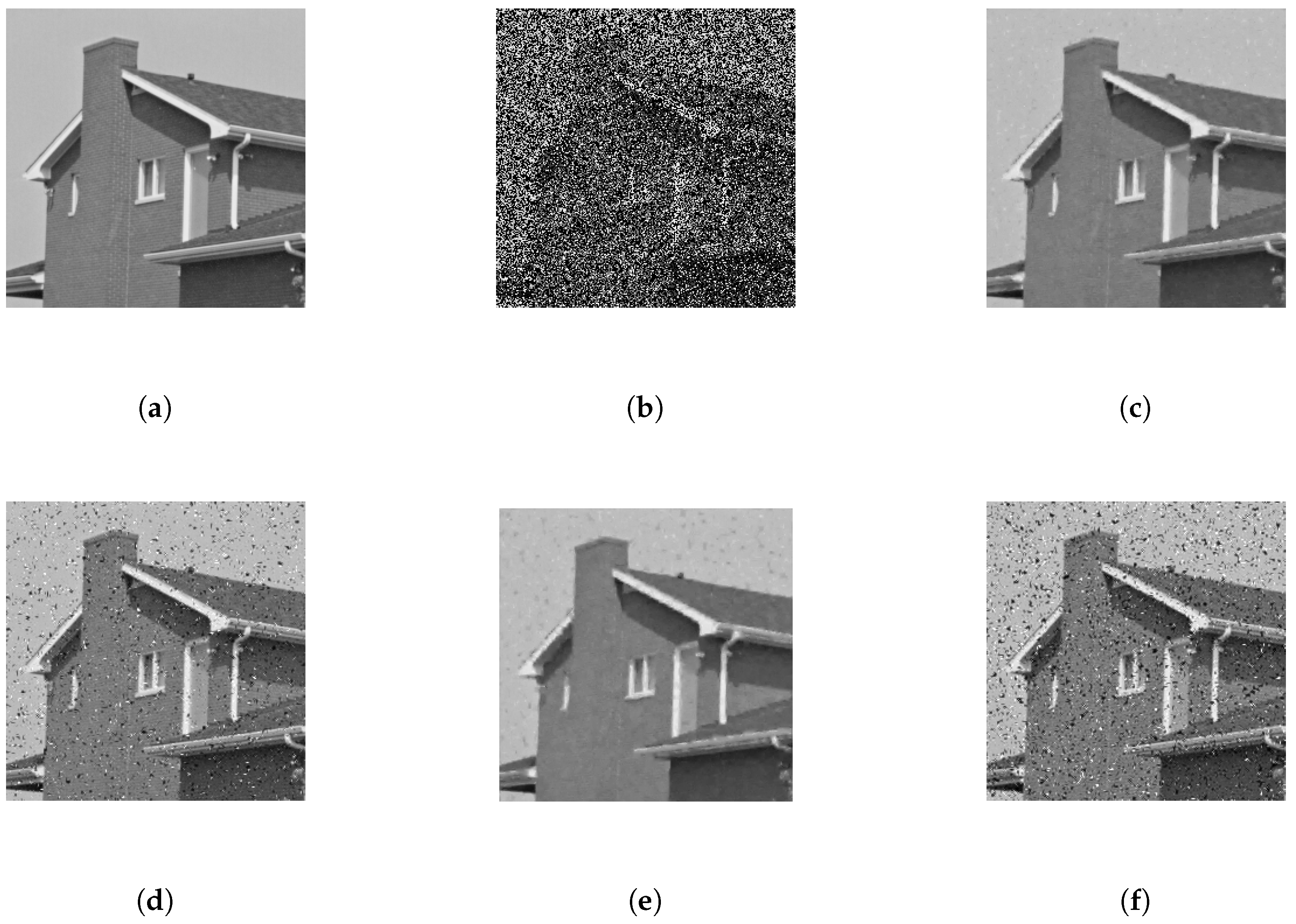
5.1. Salt-and-Pepper Noise Only
5.2. Data Missing Only
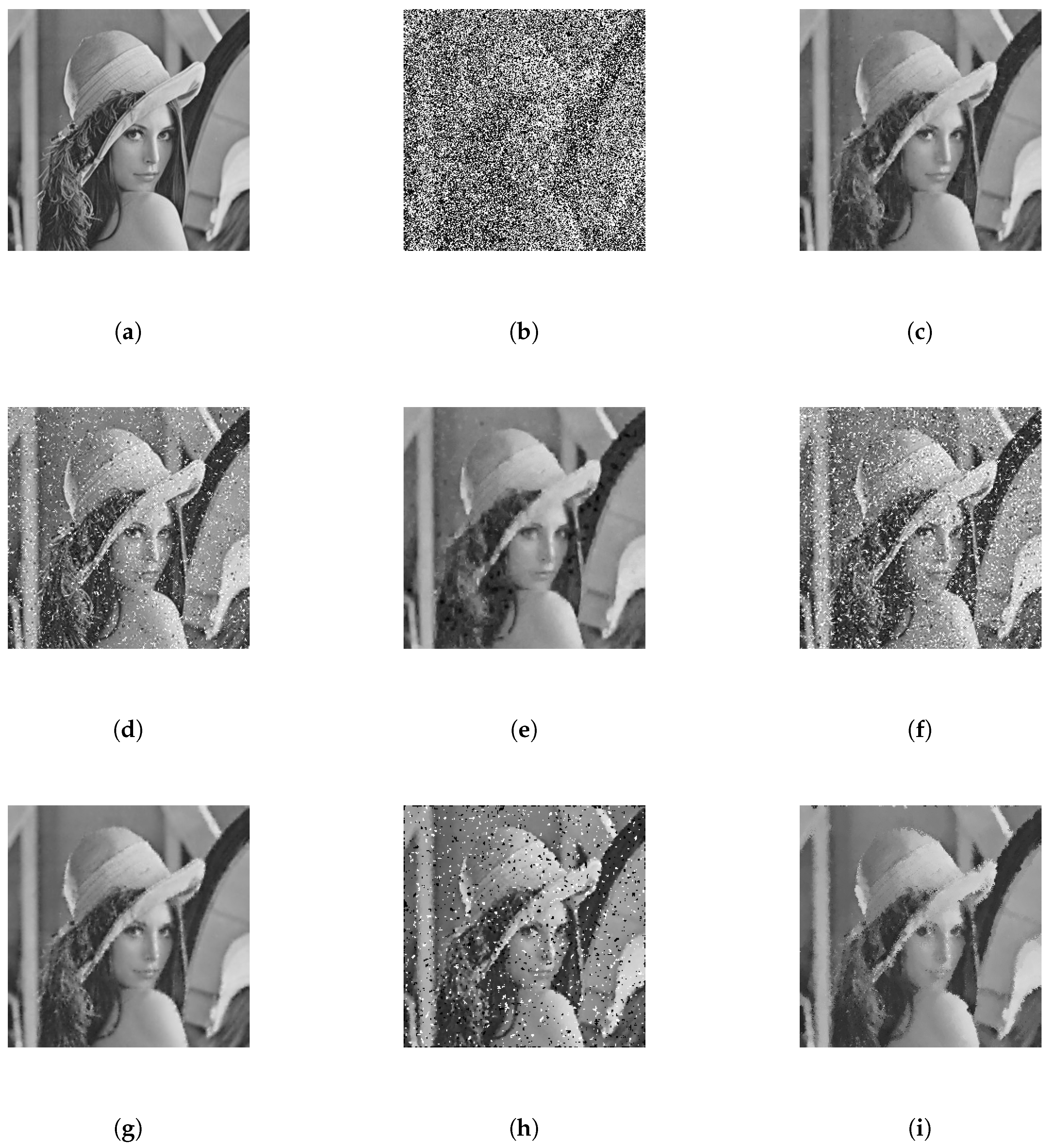
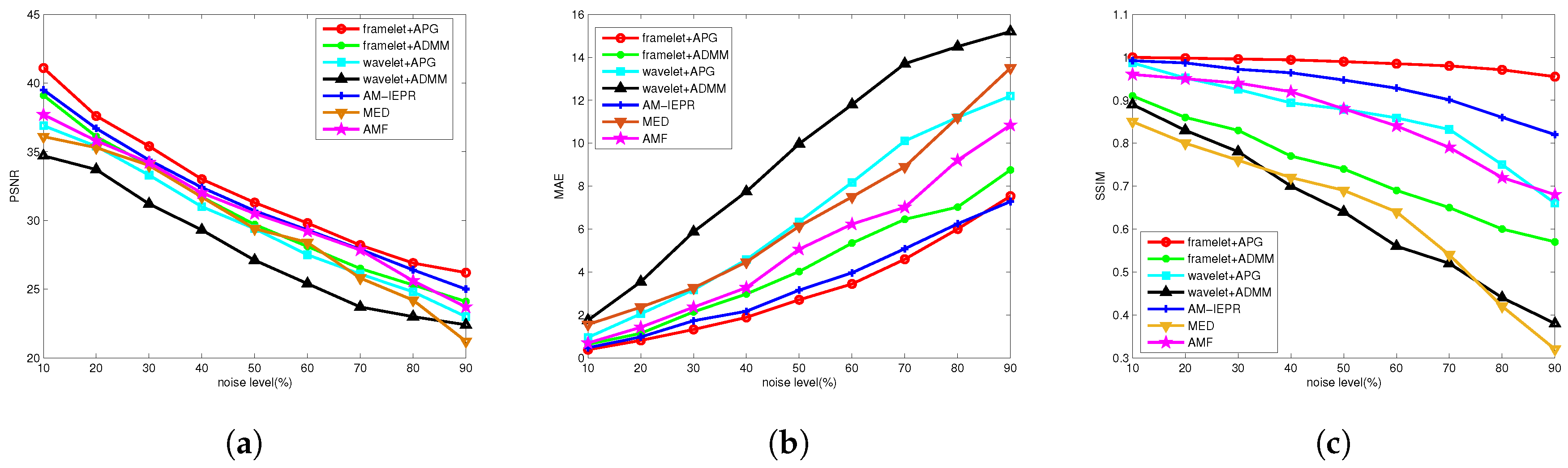
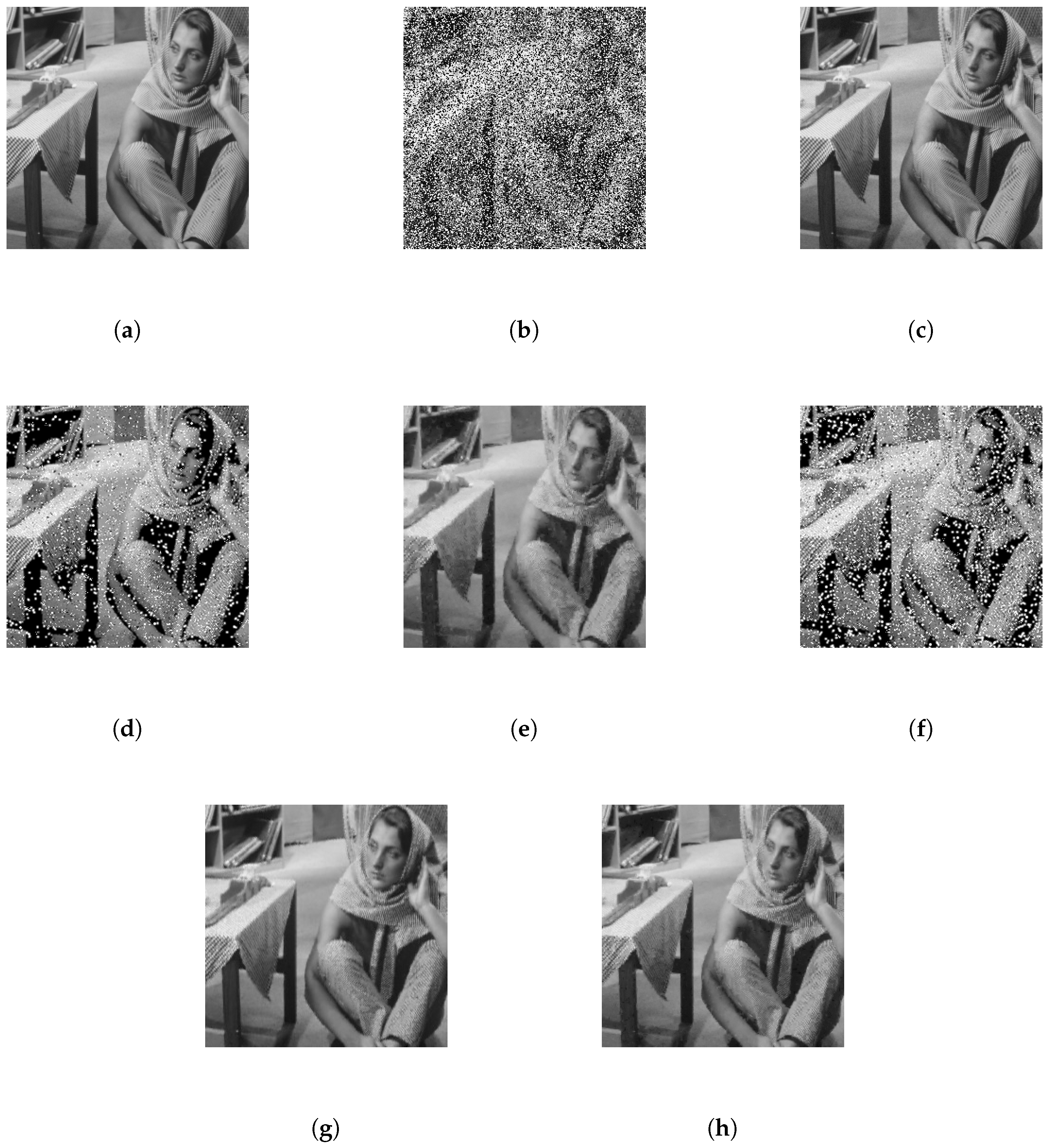
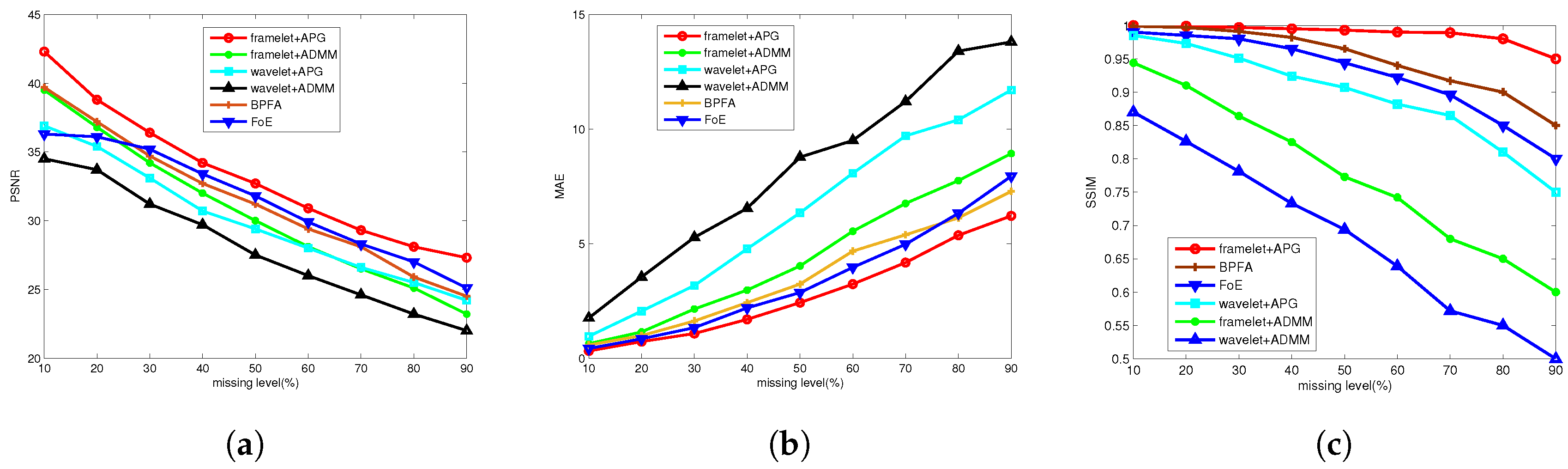
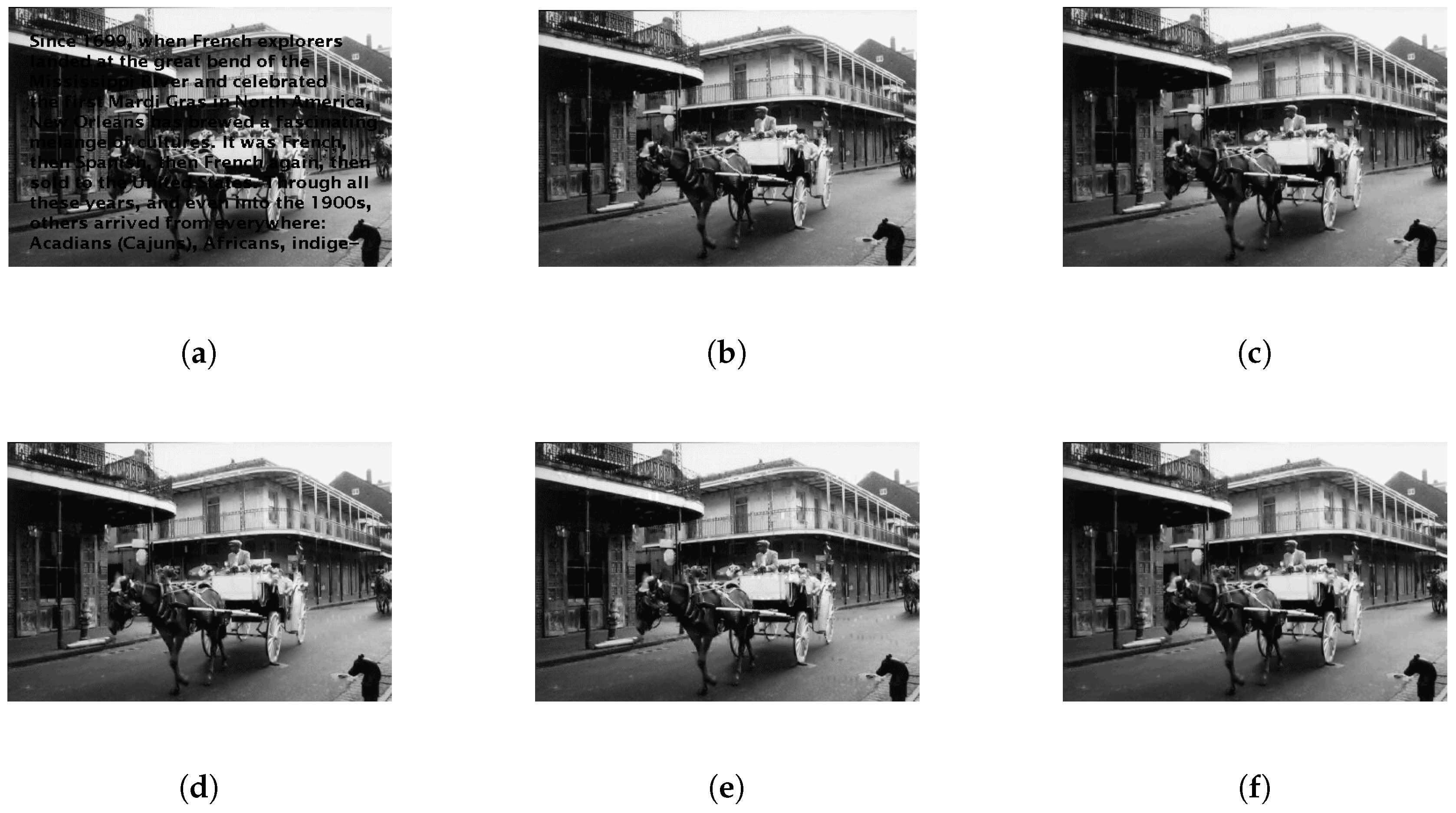
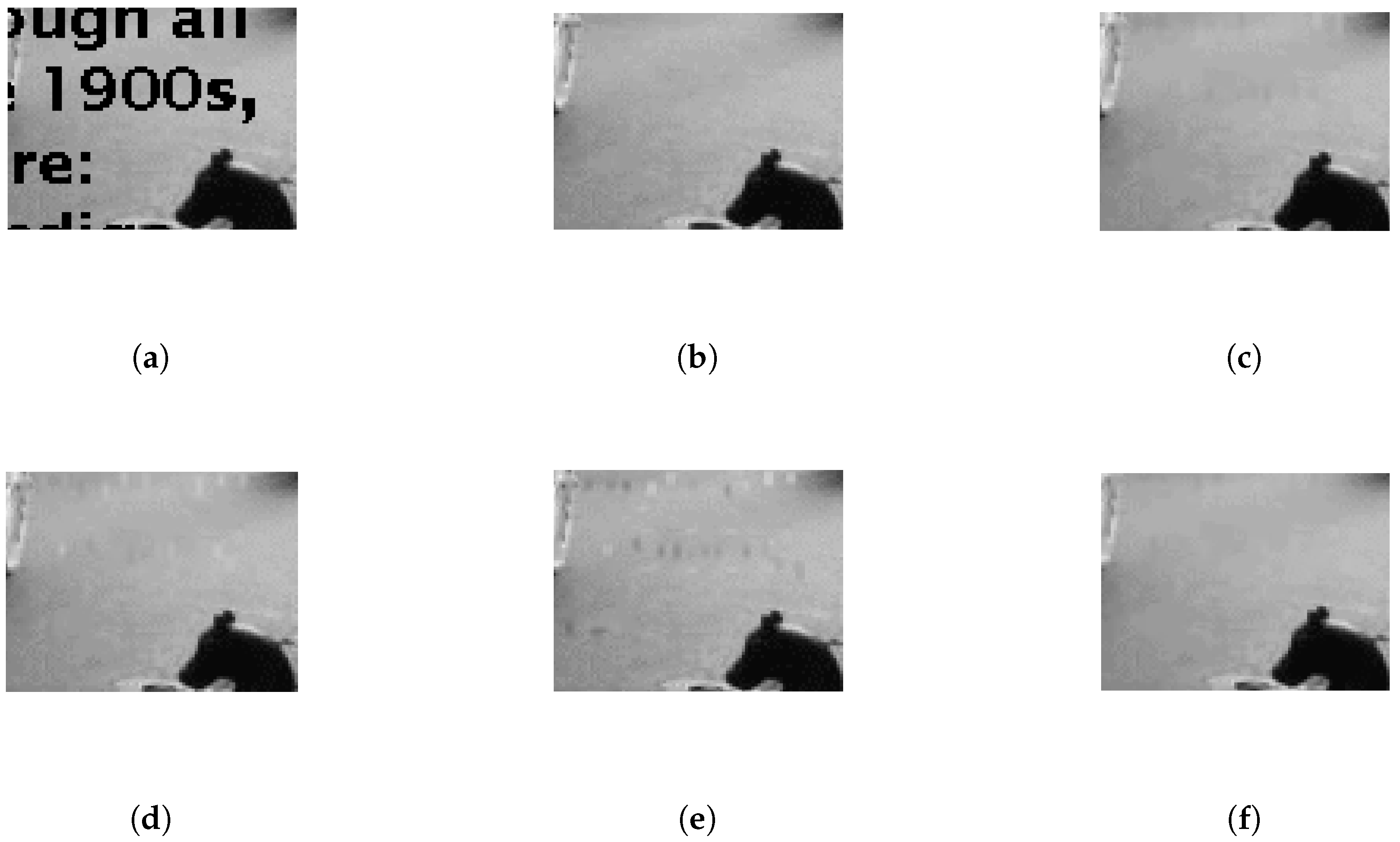
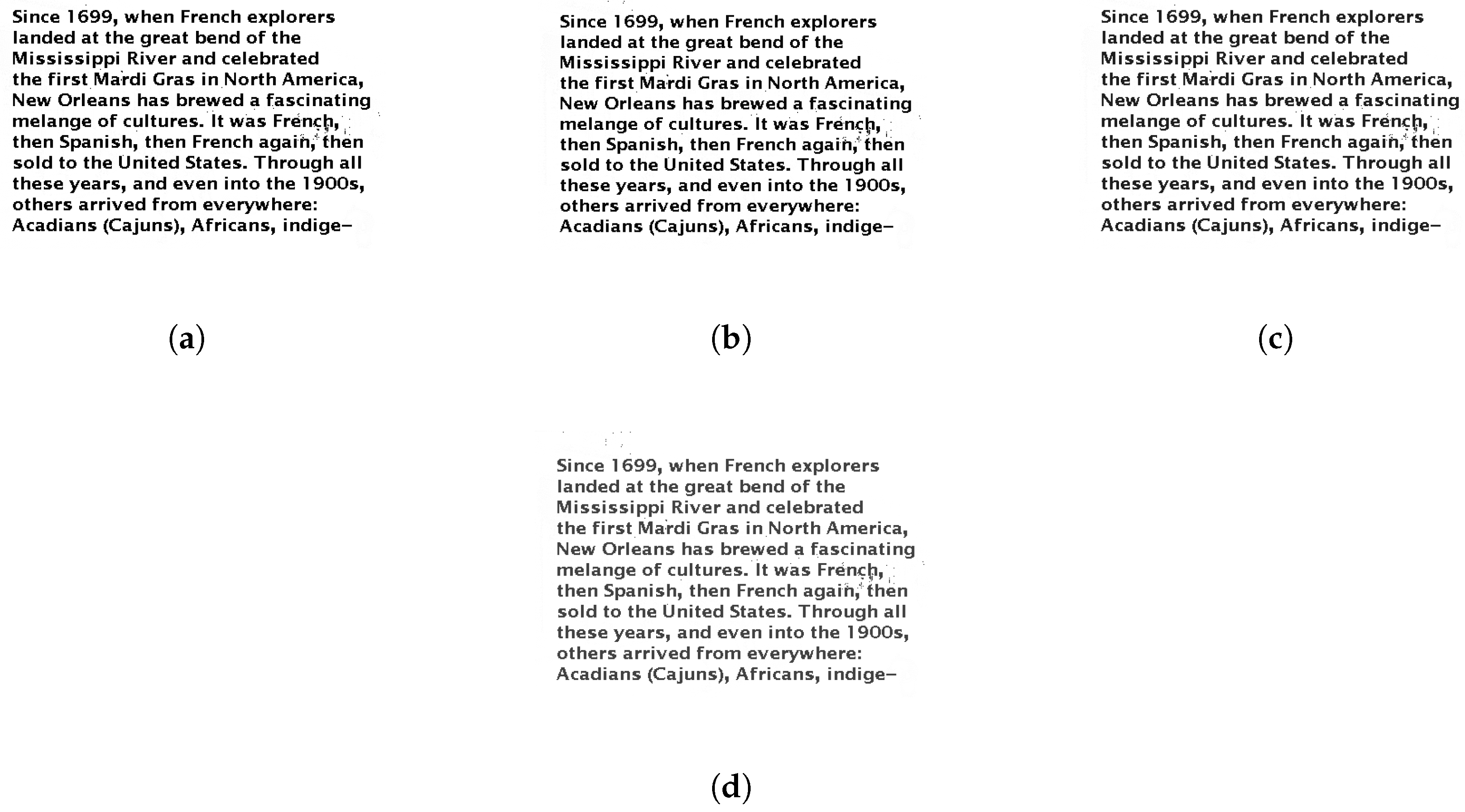
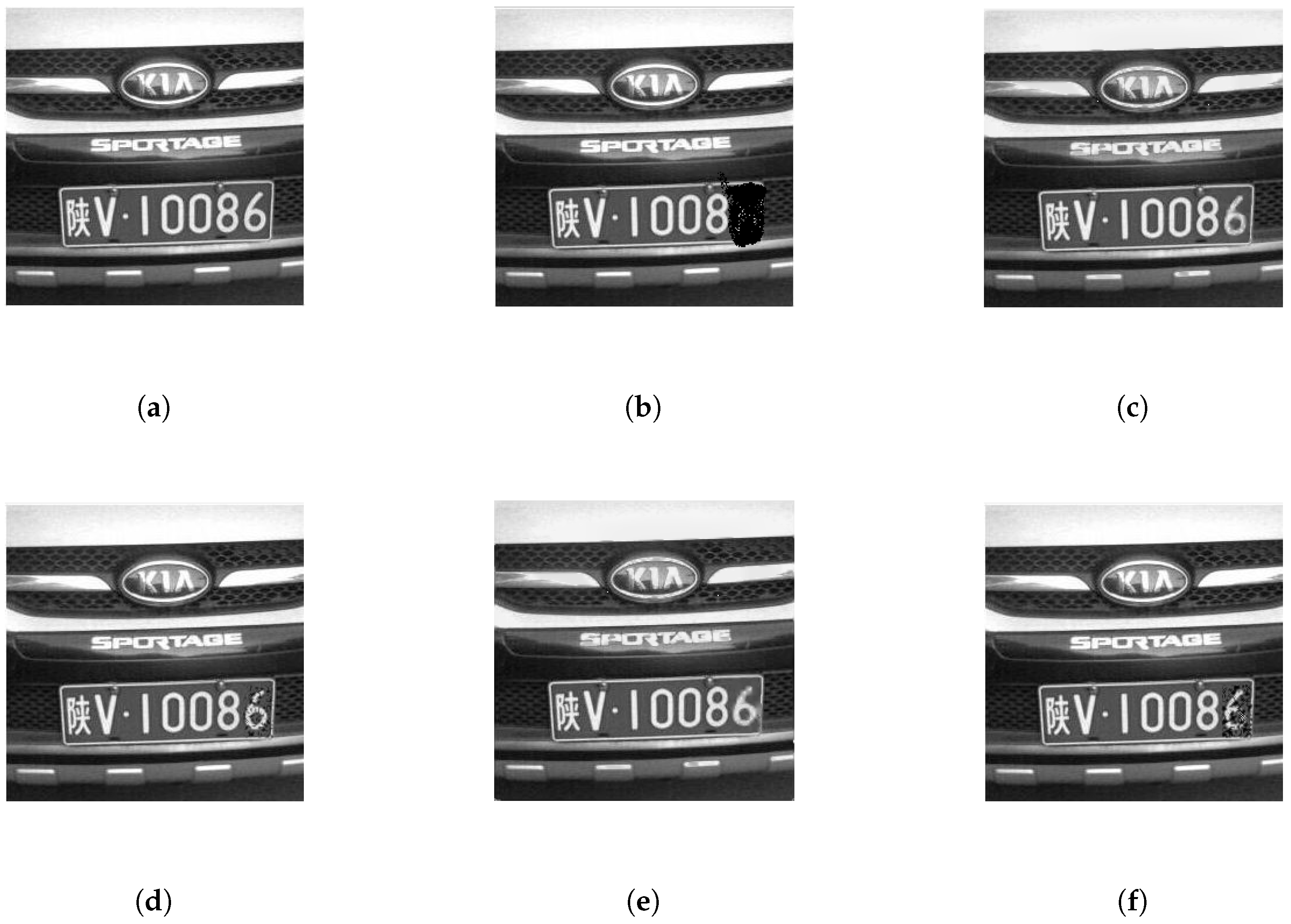
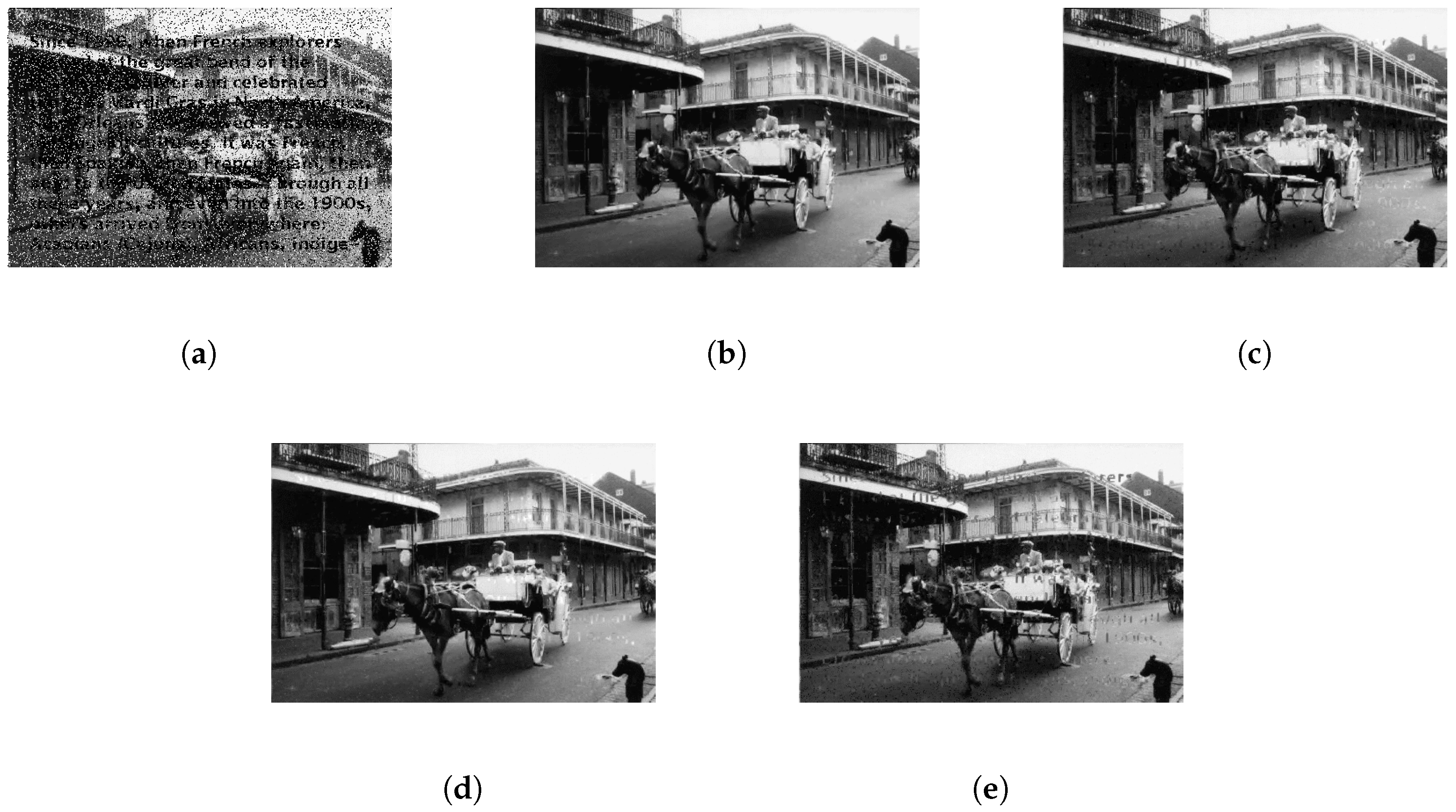
5.3. Salt-and-Pepper Noise and Data Missing
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hou, L.; Liu, H.Q.; Luo, Z.; Zhou, Y.; Truong, T.K. Image Deblurring in the Presence of Salt-and-Pepper Noise. In Proceedings of the IEEE International Conference on Image Processing (ICIP 2017), Beijing, China, 17–20 September 2017. [Google Scholar]
- Elad, M.; Aharon, M. Image denoising via sparse and redundant representations over learned dictionaries. IEEE Trans. Image Process. 2006, 15, 3736–3745. [Google Scholar] [CrossRef] [PubMed]
- Beck, A.; Teboulle, M. Fast gradient-based algorithms for constrained total variation image denoising and deblurring problems. IEEE Trans. Image Process. 2009, 18, 2419–2434. [Google Scholar] [CrossRef] [PubMed]
- Zhou, M.; Chen, H.; Paisley, J.; Ren, L.; Li, L.; Xing, Z.; Dunson, D.; Sapiro, G.; Carin, L. Nonparametric Bayesian Dictionary Learning for Analysis of Noisy and Incomplete Images. IEEE Trans. Image Process. 2012, 21, 130–144. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.C.; Hou, L.; Liu, H.Q.; Li, Y.; Truong, T.K. Reconstruction of single image from multiple blurry measured images. IEEE Trans. Image Process. 2018, 27, 2762–2776. [Google Scholar] [CrossRef] [PubMed]
- Nodes, T.A.; Gallagher, N.C. Median filters: Some modifications and their properties. IEEE Trans. Acoust. Speech Signal Process. 1982, 30, 739–746. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, D.; Li, Z. Performance enhancement and analysis of an adaptive median filter. In Proceedings of the International Conference on Communications and Networking, Shanghai, China, 22–24 August 2007; pp. 651–653. [Google Scholar]
- Zhang, P.; Li, F. A New Adaptive Weighted Mean Filter for Removing Salt-and-Pepper Noise. IEEE Signal Process. Lett. 2014, 21, 1280–1283. [Google Scholar] [CrossRef]
- Zhang, P.; Li, F. An Efficient Adaptive Fuzzy Switching Weighted Mean Filter for Salt-and-Pepper Noise Removal. IEEE Signal Process. Lett. 2016, 23, 1582–1586. [Google Scholar]
- Chan, T.; Wu, H. Space variant median filters for the restoration of impulse noise corrupted images. IEEE Trans. Circuits Syst. II Analog Digit. Signal Process. 2001, 10, 784–789. [Google Scholar] [CrossRef]
- Chan, R.H.; Ho, C.W.; Nikolova, M. Salt-and-pepper noise removal by median-type noise detectors and detail-preserving regularization. IEEE Trans. Image Process. 2005, 14, 1479–1485. [Google Scholar] [CrossRef]
- Ballester, C.; Bertalmio, M.; Caselles, V.; Sapiro, G. Filling-in by joint interpolation of vector fields and gray levels. IEEE Trans. Image Process. 2001, 10, 1200–1211. [Google Scholar] [CrossRef]
- Rares, A.; Reinders, M.J.T.; Biemond, J. Edge-based image restoration. IEEE Trans. Image Process. 2005, 14, 1454–1468. [Google Scholar] [CrossRef]
- Drori, I.; Cohen-Or, D.; Twshueun, H. Fragment-based image completion. ACM Trans. Graph. (TOG) 2003, 22, 303–312. [Google Scholar] [CrossRef]
- Criminisi, A.; Perez, P.; Tayama, K. Region filling and object removal by exemplar-based image inpainting. IEEE Trans. Image Process. 2003, 13, 1200–1212. [Google Scholar] [CrossRef]
- Roth, S.; Black, M.J. Fields of Experts. Int. J. Comput. Vis. 2009, 82, 205–229. [Google Scholar] [CrossRef]
- Kwok, T.H.; Sheung, H.; Wang, C.C.L. Fields of Experts. Fast Query Ex.-Based Image Complet. 2010, 19, 3106–3115. [Google Scholar]
- Xu, Z.; Sun, J. Image inpainting by patch propagation using patch sparsity. IEEE Trans. Image Process. 2010, 19, 1153–1165. [Google Scholar] [PubMed]
- Mairal, J.; Elad, M.; Sapiro, G. Sparse representation for color image restoration. IEEE Trans. Image Process. 2008, 17, 53–69. [Google Scholar] [CrossRef] [PubMed]
- Shen, B.; Hu, W.; Zhang, Y.; Zhang, Y.J. Image Inpainting via Sparse Representation. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2009), Taipei, Taiwan, 19–24 April 2009. [Google Scholar]
- Liu, H.Q.; Li, D.; Zhou, Y.; Truong, T.K. Simultaneous Radio Frequency and Wideband Interference Suppression in SAR Signals via Sparsity Exploitation in Time-Frequency Domain. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5780–5793. [Google Scholar] [CrossRef]
- Liu, H.Q.; Li, Y.; Zhou, Y.; Chang, H.C.; Truong, T.K. Impulsive noise suppression in the case of frequency estimation by exploring signal sparsity. Digit. Signal Process. 2016, 57, 34–45. [Google Scholar] [CrossRef]
- Liu, H.Q.; Ding, D.; Li, Y.; Zhou, Y. Frequency Estimation with Missing Measurements under Impulsive Noise. In Proceedings of the IEEE 8th International Congress on Image and Signal Processing (CISP 2015), Shenyang, China, 14–16 October 2015. [Google Scholar]
- Zorzi, M.; Sepulchre, R. AR Identification of Latent-Variable Graphical Models. IEEE Trans. Autom. Control 2016, 61, 2327–2340. [Google Scholar]
- Daubechies, I.; Bates, B.J. Ten Lectures on Wavelets. J. Acoust. Soc. Am. 1992, 93, 1671. [Google Scholar] [CrossRef]
- He, L.; Wang, Y. Iterative Support Detection-Based Split Bregman Method for Wavelet Frame-Based Image Inpainting. IEEE Trans. Image Process. 2014, 23, 5470–5485. [Google Scholar] [CrossRef] [PubMed]
- Daubechies, I.; Han, B.; Ron, A.; Shen, Z. Framelets: MRA-based constructions of wavelet frames. Appl. Comput. Harmon. Anal. 2003, 14, 1–46. [Google Scholar] [CrossRef]
- Sree, P.S.J.; Kumar, P.; Siddavatam, R.; Verma, R. Salt-and-pepper noise removal by adaptive median-based lifting filter using second-generation wavelets. Int. J. Signal Image Video Process. 2013, 7, 111–118. [Google Scholar] [CrossRef]
- Daubechies, I.; Lu, J.; Wu, H.T. Synchrosqueezed wavelet transforms: An empirical mode decomposition-like tool. Appl. Comput. Harmon. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef]
- Ciccone, V.; Ferrante, A.; Zorzi, M. Factor Models with Real Data: A Robust Estimation of the Number of Factors. arxiv, 2018; arXiv:1709.01168. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Bioucas-Dias, J.; Figueiredo, M. A new TwIST: Two-step iterative shrinkage/thresholding algorithms for image restoration. IEEE Trans. Image Process. 2007, 16, 2992–3004. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Salt-and-Pepper Noise+Missing | |||
|---|---|---|---|
| framelet+APG | 34.42 | 31.57 | 29.26 |
| framelet+ADMM | 33.17 | 29.56 | 27.35 |
| wavelet+APG | 32.29 | 29.13 | 27.04 |
| wavelet+ADMM | 30.57 | 27.46 | 25.34 |
| Salt-and-Pepper Noise+Missing | |||
|---|---|---|---|
| framelet+APG | 1.54 | 2.57 | 3.82 |
| framelet+ADMM | 2.52 | 3.96 | 5.79 |
| wavelet+APG | 4.76 | 7.06 | 10.42 |
| wavelet+ADMM | 6.23 | 9.87 | 15.43 |
| Salt-and-Pepper Noise+Missing | |||
|---|---|---|---|
| framelet+APG | 0.994 | 0.988 | 0.982 |
| framelet+ADMM | 0.815 | 0.742 | 0.686 |
| wavelet+APG | 0.931 | 0.879 | 0.859 |
| wavelet+ADMM | 0.784 | 0.716 | 0.597 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Hou, L.; Luo, Z.; Zhou, Y.; Jing, X.; Truong, T.-K. Image Recovery with Data Missing in the Presence of Salt-and-Pepper Noise. Appl. Sci. 2019, 9, 1426. https://doi.org/10.3390/app9071426
Liu H, Hou L, Luo Z, Zhou Y, Jing X, Truong T-K. Image Recovery with Data Missing in the Presence of Salt-and-Pepper Noise. Applied Sciences. 2019; 9(7):1426. https://doi.org/10.3390/app9071426
Chicago/Turabian StyleLiu, Hongqing, Liming Hou, Zhen Luo, Yi Zhou, Xiaorong Jing, and Trieu-Kien Truong. 2019. "Image Recovery with Data Missing in the Presence of Salt-and-Pepper Noise" Applied Sciences 9, no. 7: 1426. https://doi.org/10.3390/app9071426
APA StyleLiu, H., Hou, L., Luo, Z., Zhou, Y., Jing, X., & Truong, T.-K. (2019). Image Recovery with Data Missing in the Presence of Salt-and-Pepper Noise. Applied Sciences, 9(7), 1426. https://doi.org/10.3390/app9071426