Coordination of Power-System Stabilizers and Battery Energy-Storage System Controllers to Improve Probabilistic Small-Signal Stability Considering Integration of Renewable-Energy Resources


Abstract
:Featured Application
Abstract
1. Introduction
- Proposal of a procedure to compute the continuous probability function of RES and use it to assess PSSS.
- Development of a probabilistic method to optimally tune power-system controllers, such as PSSs and BESSs, considering power fluctuation due to RES.
- Development of a detailed model of BESSs in DIGSILENT [25], and the study of the effect of the proposed control strategy of utilizing BESS controllers and PSS in a coordinated manner on probabilistic low-frequency oscillatory stability.
- Use of the firefly algorithm to coordinate power-system controllers.
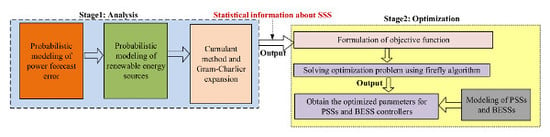
2. General Overview of the Proposed Method
- Probabilistic modeling of input random variables (RES output power) using power-forecast error. The so-obtained probabilistic models are efficient and convenient to use with analytical methods, and are described in detail in Section 3.1.
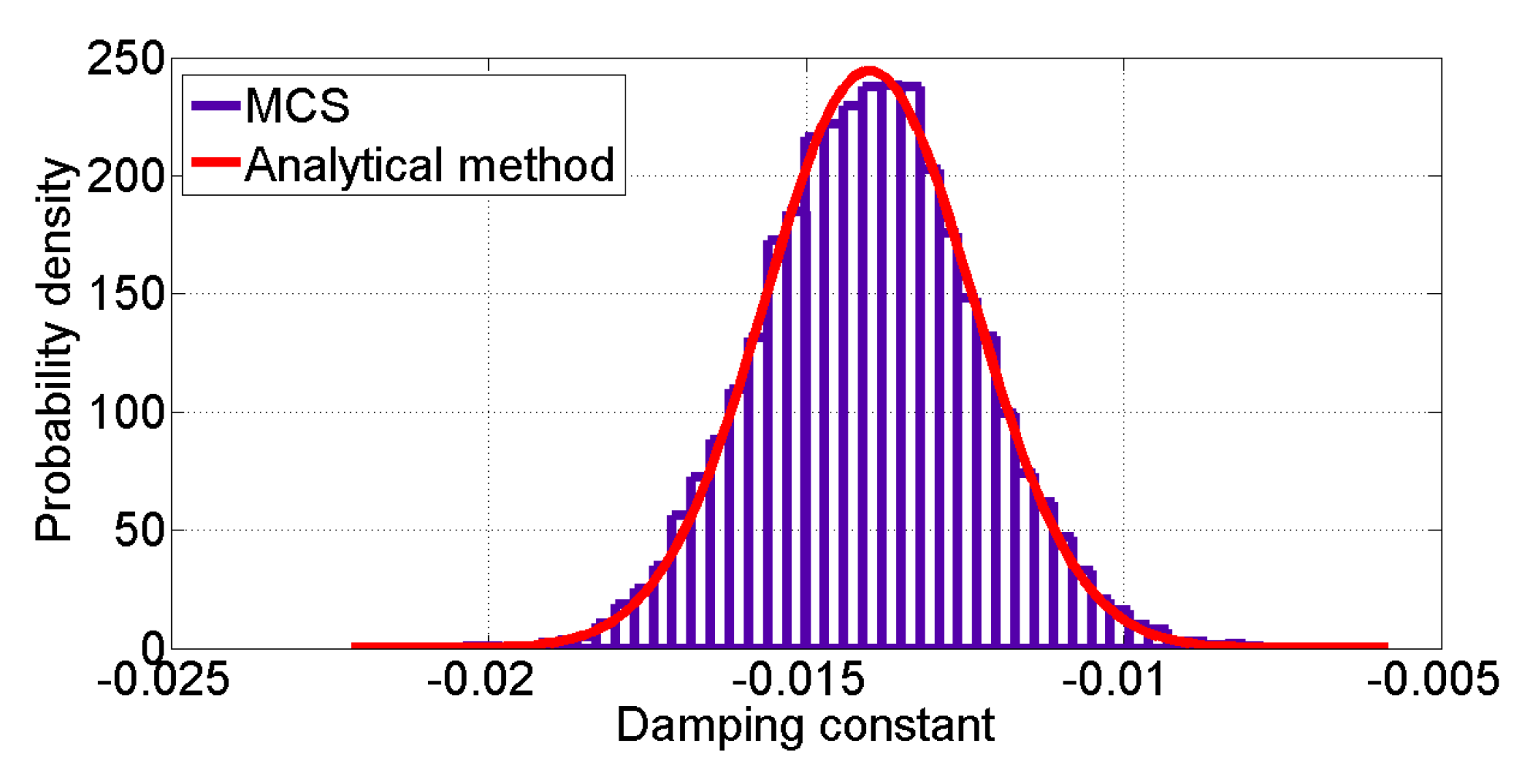
- Input PDFs are then used with an analytical method based on cumulants [2,26] to calculate the PDF of output random variables. Output random variables in this paper are the real eigenvalue part (also called the damping constant) and damping factor. The cumulant method was chosen over other analytical methods, such as point estimate and probabilistic collocation, due to its higher accuracy as well as computational efficiency [27].
- Next, the Gram–Charlier expansion method [26] was used with output random variables to calculate statistical indices that provide information about the small-signal stability margin. More details for Steps 2 and 3 can be found in Section 3.2.
- If the system is found to have a critical value of indices with respect to oscillatory stability, the power-system controllers are then tuned in a coordinated manner. This coordination is achieved by formulating it as an optimization problem. The objective function of this optimization problem consists of probabilistic stability indices (obtained from Part 1) and is solved using the firefly algorithm. The detailed description of this process can be found in Section 4.2.
3. PSSS Assessment Using Developed Efficient Probabilistic RES Model
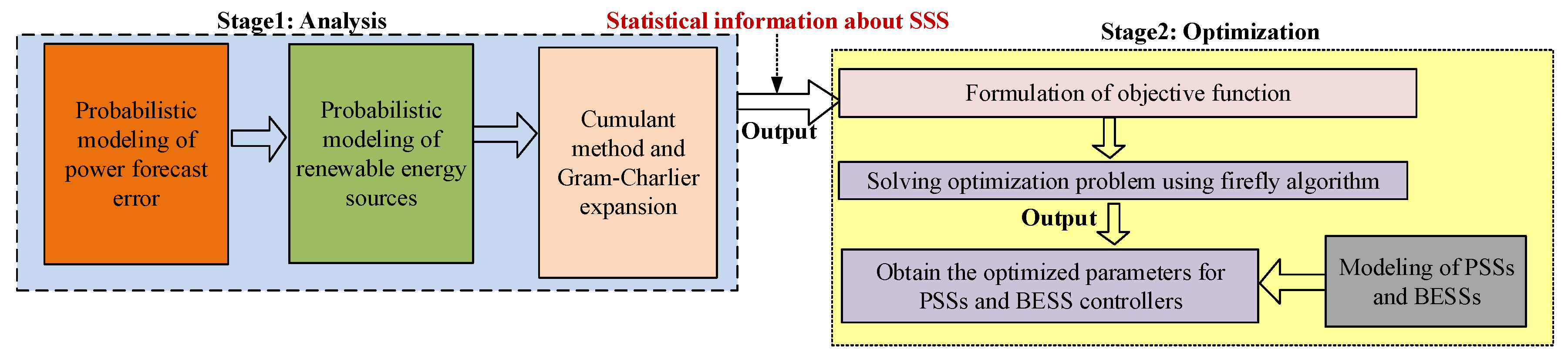
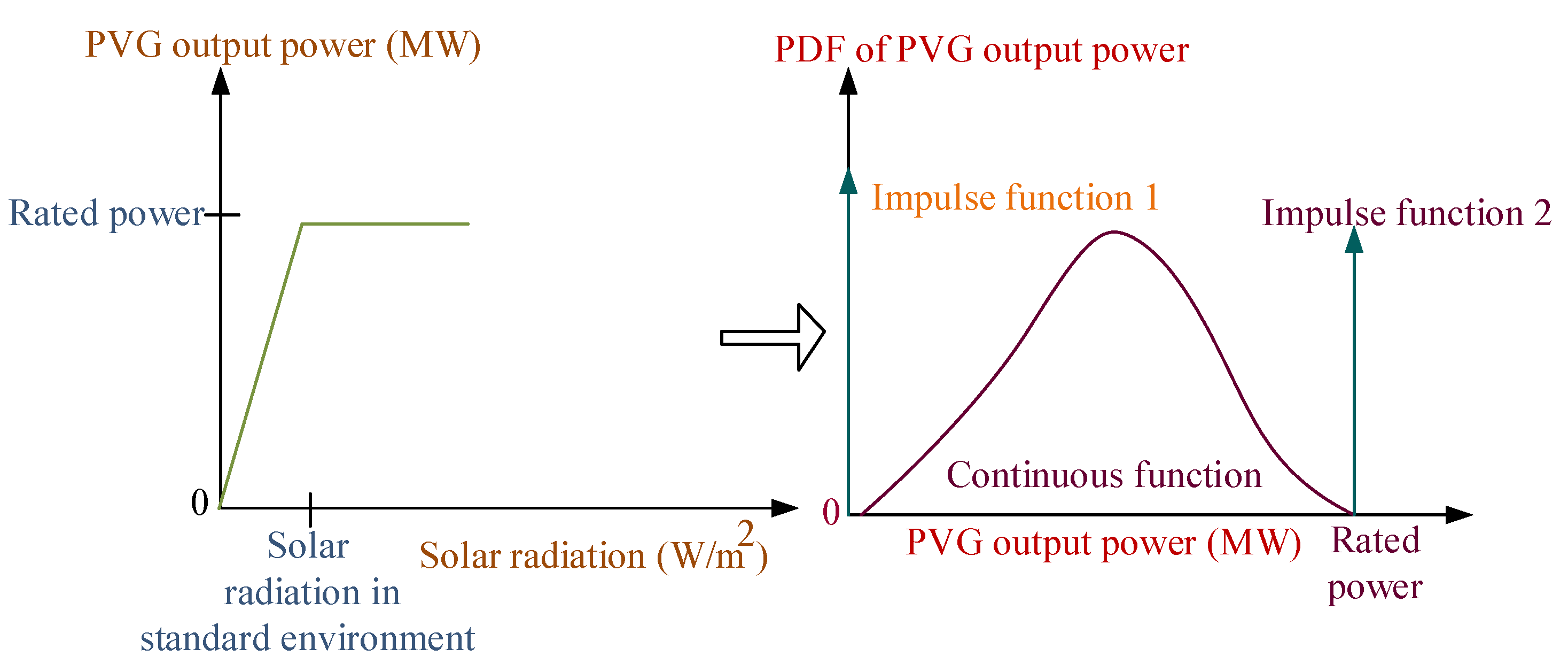
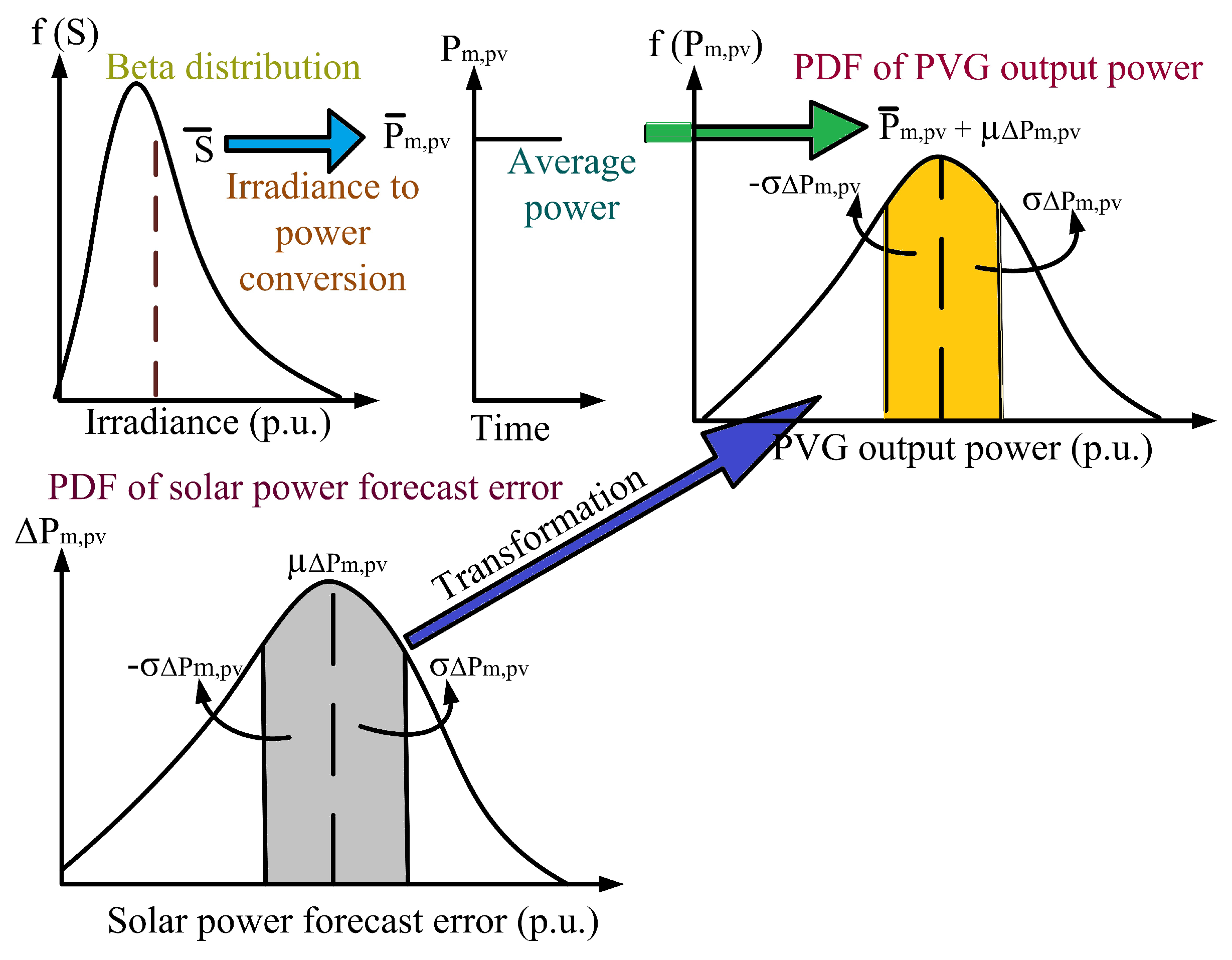
3.1. Development of PVG Probability Function and WTG Output Power
3.2. Stability Index Calculation
4. Coordination of PSS and BESS Controllers to Enhance Oscillatory Stability Using Proposed Method
4.1. Power-System-Controller Modeling
4.1.1. Power-System Stabilizers
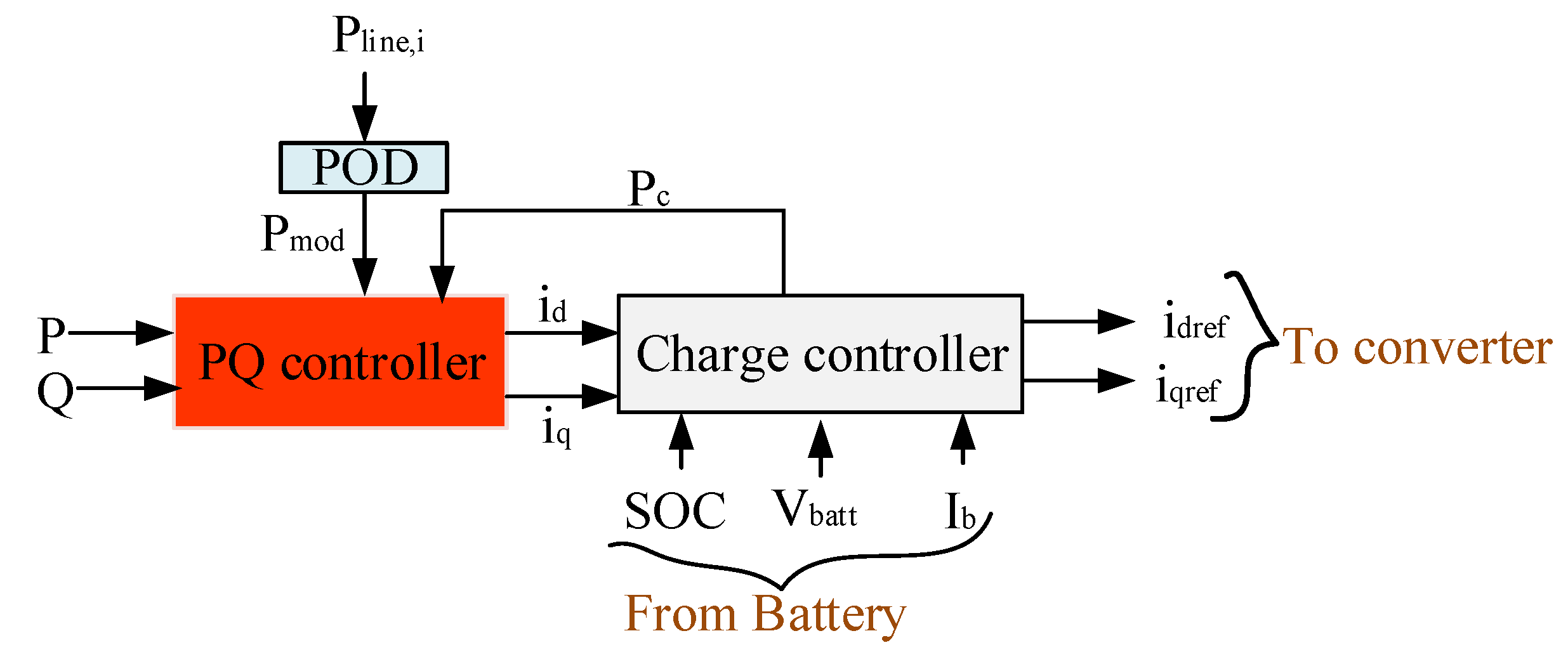
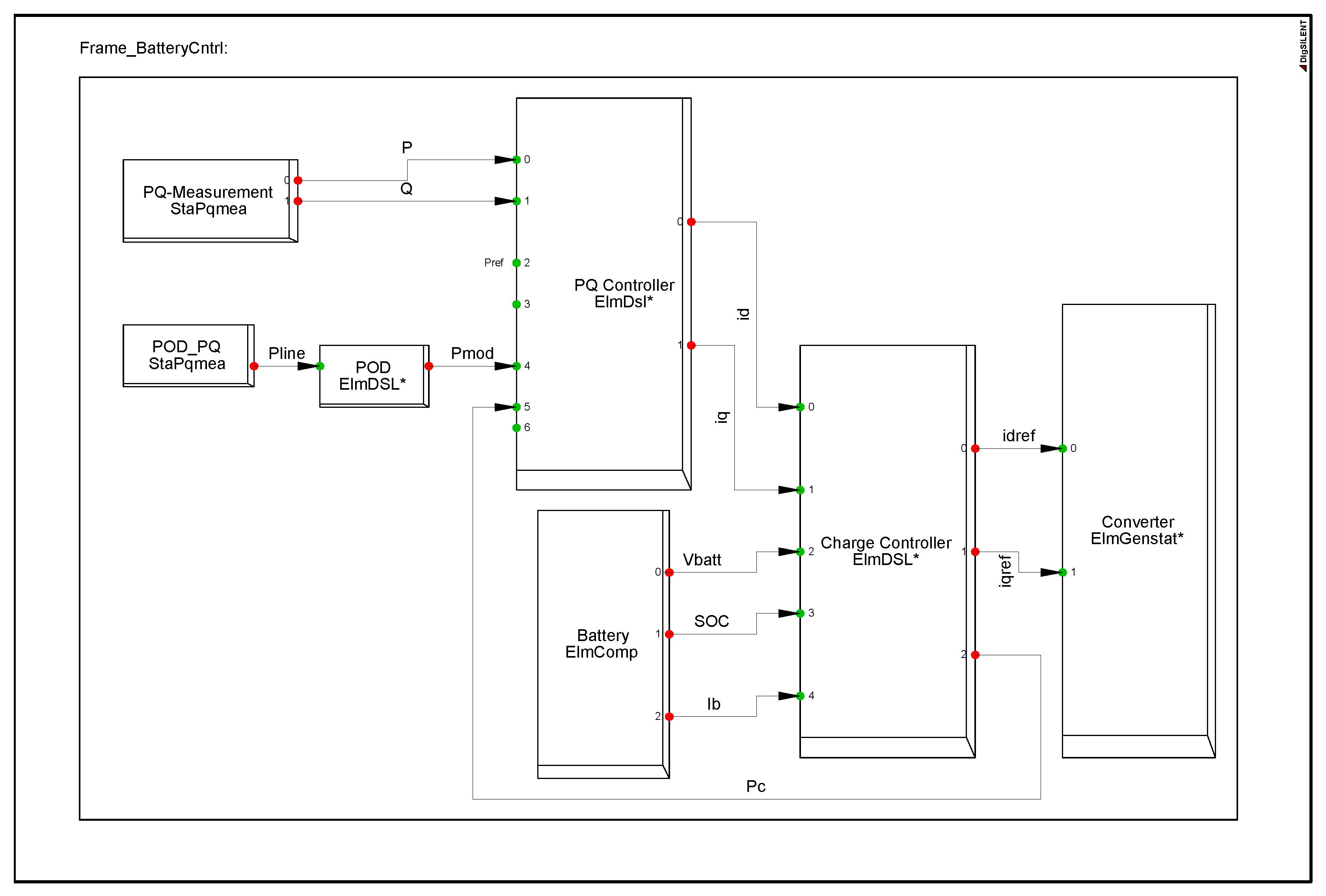
4.1.2. Modeling of Sodium–Sulfur-Based BESS and Its Controllers in DIGSILENT
4.1.2.1. Battery Model
4.1.2.2. POD Controller for BESS
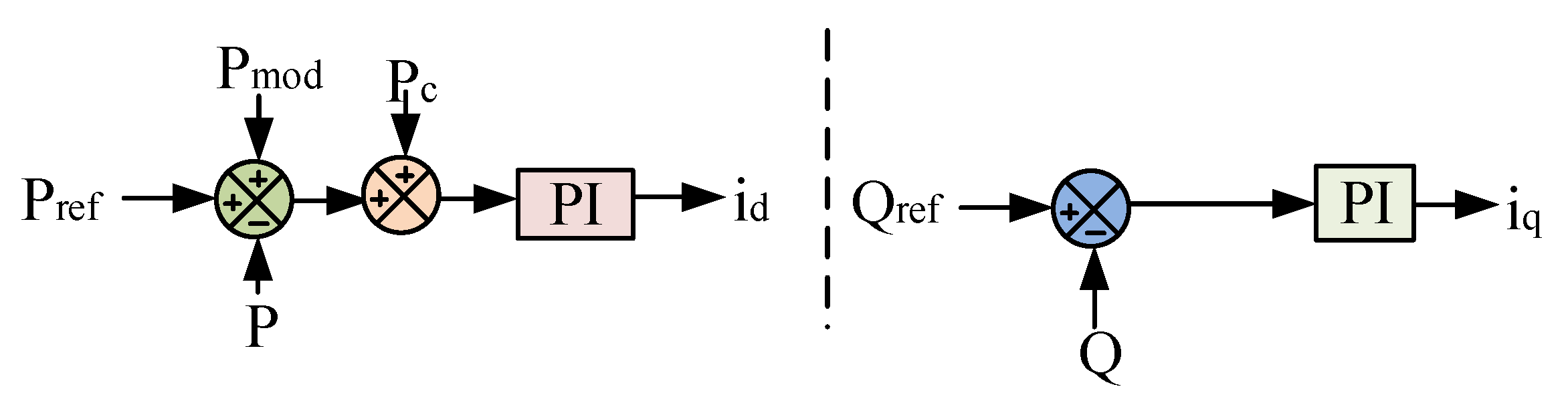
4.1.2.3. PQ Controller
4.2. Power-System-Controller Tuning Using Optimization Technique
4.2.1. Optimization-Problem Formulation
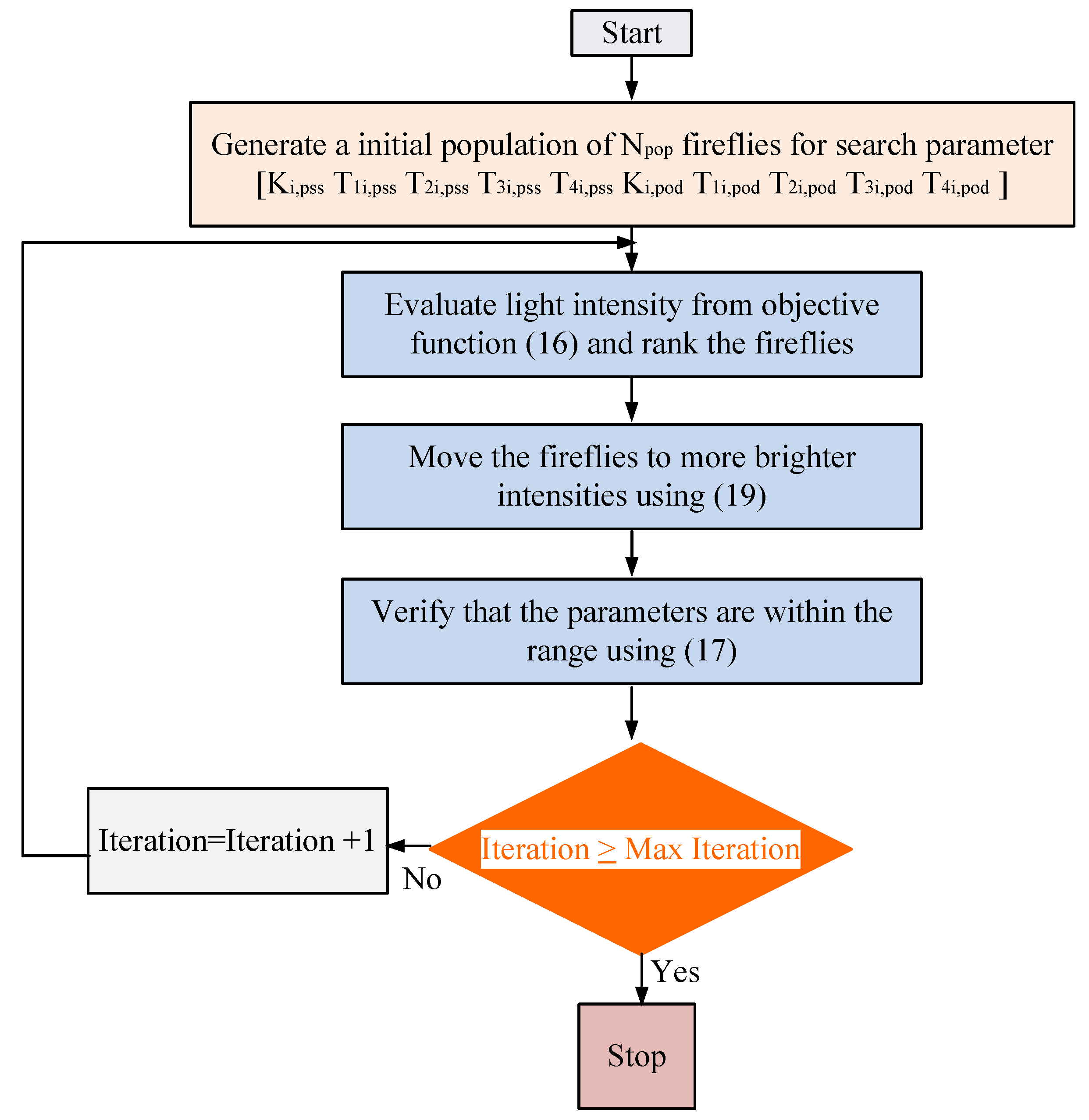
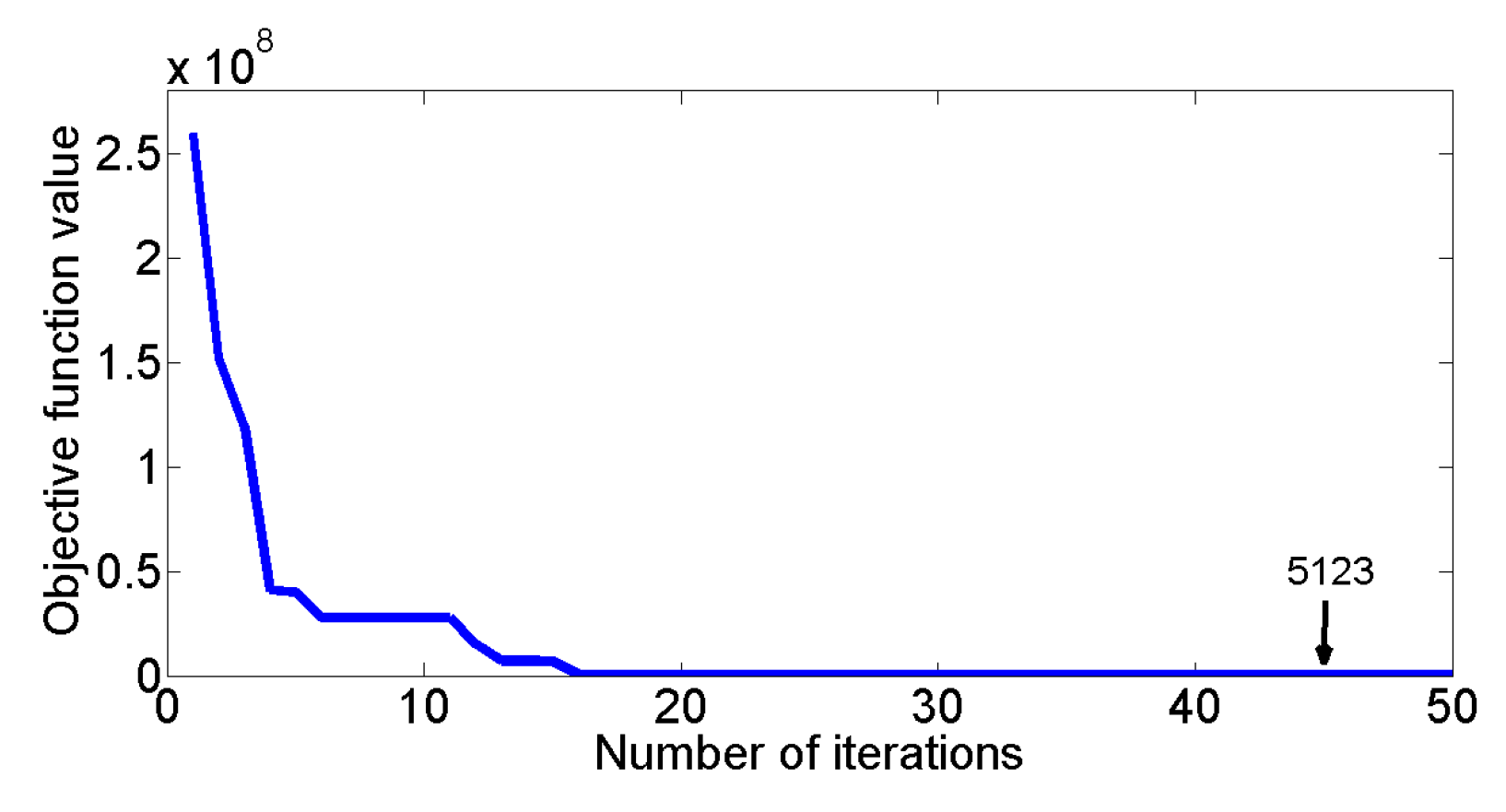
4.2.2. Solving Optimization Problem Using Firefly Algorithm
| Algorithm 1: General pseudocode of firefly algorithm |
| Computation of value for objective function with t decision variables Generate initial random population for n fireflies Calculate light intensity for using Define light-absorption coefficient While (k < Maximum Generation) for i = 1:n, n for j = 1:n, n (if Li < Lj), Move firefly i towards j; end if Change attractiveness with distance r exp−γr Compute new solutions and update light intensity end for j end for i Rank fireflies and find current global best solution end while |
- In the first step, each control parameter is assigned an array of random numbers, with the total number size of fireflies as:
- Control parameters are then used to compute the objective function using Equation (16), whose values represent firefly light intensity. The fireflies are then sorted and accordingly ranked. The so-obtained control parameters after ranking are termed as .
- The movement of less-bright fireflies to brighter fireflies is given by:where is the position of the fireflies at the next iteration, is the attractiveness coefficient, is the vector of random numbers, is the light-absorption constant, is the randomization parameter, and is the Cartesian distance between two fireflies.
- If the value of a control parameter exceeds its range, it is reset back to its maximum or minimum value, depending upon its nearness to the extreme value given by Equation (17).
- Continue to the next iteration until the maximum number of iterations is reached.
5. Results and Discussion
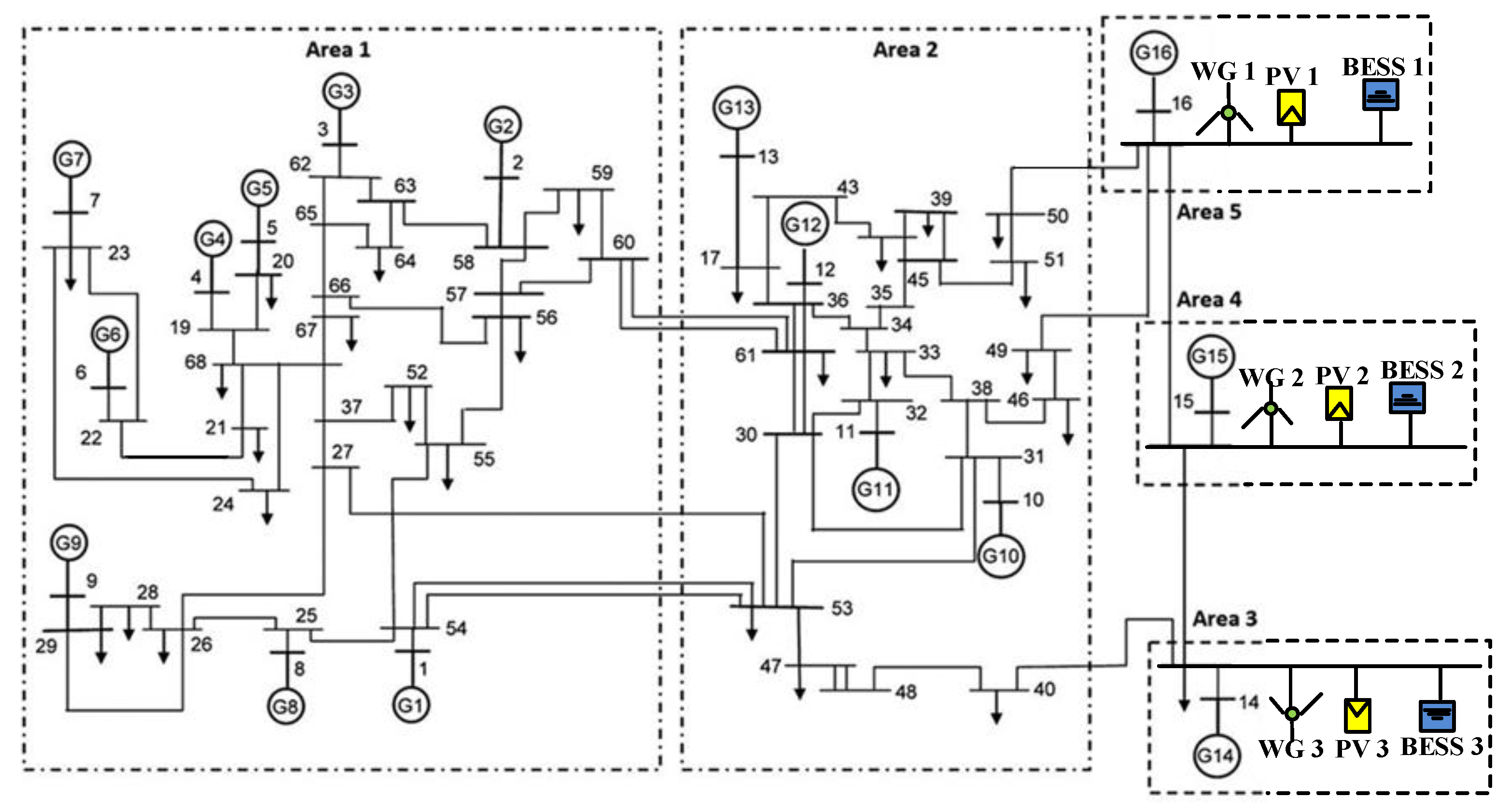
5.1. Test System
5.2. Simulation Results
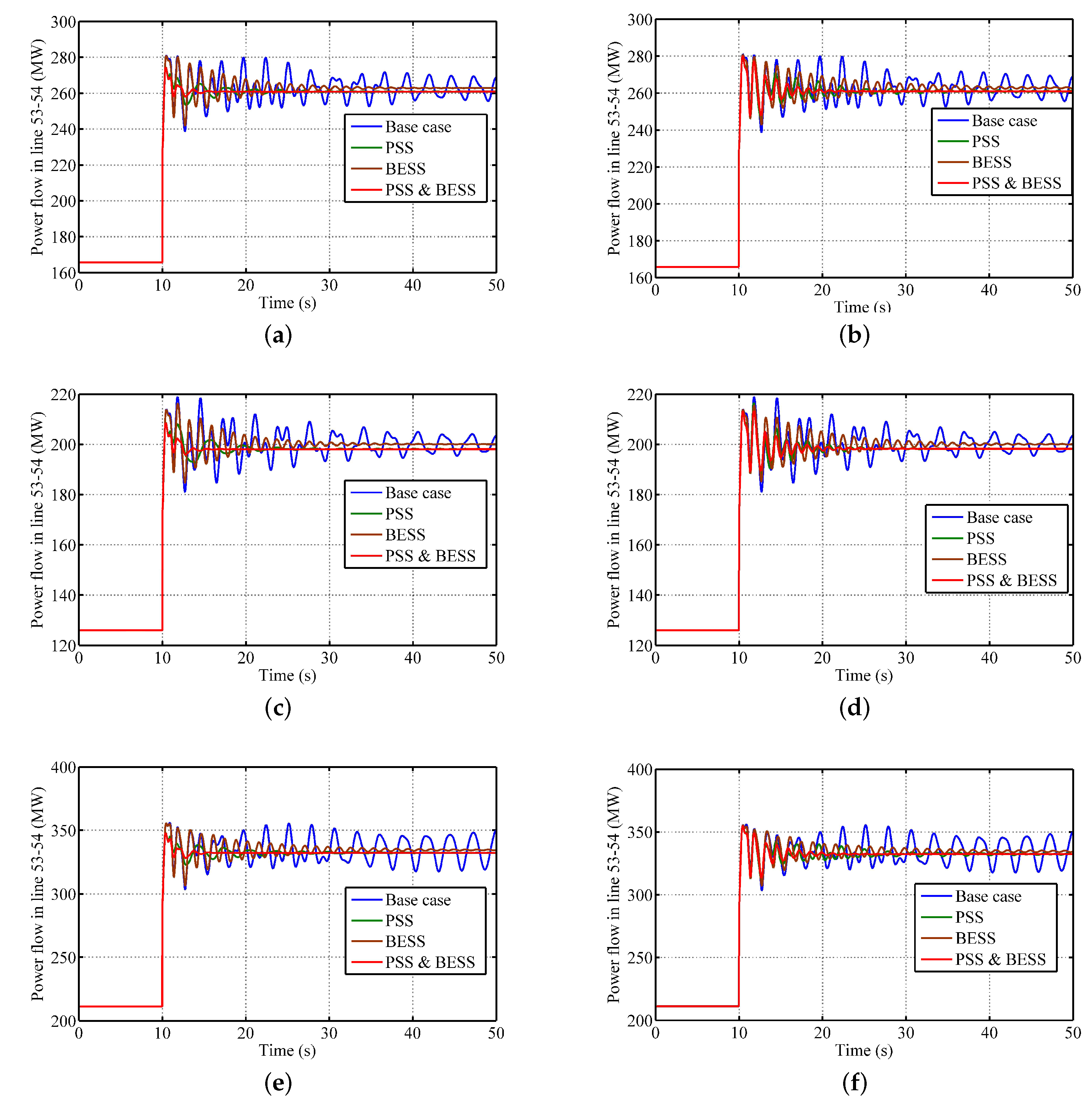
5.2.1. Results under Different Controller Configurations
5.2.2. Comparison of Different Controller Cases Under Different Scenarios
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. PVG, WTG, and BESS Parameters
Appendix A.1. PVG Data
Appendix A.2. PVG Power Forecast Error Data
Appendix A.3. PVG Controller Parameters
Appendix A.4. Wind-Turbine Data
Appendix A.5. Wind-Power Forecast-Error Data
Appendix A.6. WTG Controller Parameters
Appendix A.7. BESS Size Determination
Appendix A.8. Battery Parameters
Appendix A.9. BESS Controller Parameters
References
- REN21 Secretariat. Global Status Report; REN21 Secretariat: Paris, France, 2018. [Google Scholar]
- Bu, S.; Du, W.; Wang, H.; Chen, Z.; Xiao, L.; Li, H. Probabilistic analysis of small-signal stability of large-scale power systems as affected by penetration of wind generation. IEEE Trans. Power Syst. 2012, 27, 762–770. [Google Scholar] [CrossRef]
- Bu, S.; Du, W.; Wang, H. Probabilistic analysis of small-signal rotor angle/voltage stability of large-scale AC/DC power systems as affected by grid-connected offshore wind generation. IEEE Trans. Power Syst. 2013, 28, 3712–3719. [Google Scholar] [CrossRef]
- Bu, S.; Du, W.; Wang, H. Investigation on probabilistic small-signal stability of power systems as affected by offshore wind generation. IEEE Trans. Power Syst. 2015, 30, 2479–2486. [Google Scholar] [CrossRef]
- Wang, Z.; Shen, C.; Liu, F. Probabilistic analysis of small signal stability for power systems with high penetration of wind generation. IEEE Trans. Sustain. Energy 2016, 7, 1182–1193. [Google Scholar] [CrossRef]
- Sauer, P.W.; Pai, M. Power System Dynamics and Stability; Prentice Hall: Upper Saddle River, NJ, USA, 1998; Volume 1. [Google Scholar]
- Hannan, M.A.; Islam, N.N.; Mohamed, A.; Lipu, M.S.H.; Ker, P.J.; Rashid, M.M.; Shareef, H. Artificial Intelligent Based Damping Controller Optimization for the Multi-Machine Power System: A Review. IEEE Access 2018, 6, 39574–39594. [Google Scholar] [CrossRef]
- Liu, S.; Liu, P.X.; Wang, X. Stability analysis of grid-interfacing inverter control in distribution systems with multiple photovoltaic-based distributed generators. IEEE Trans. Ind. Electron. 2016, 63, 7339–7348. [Google Scholar] [CrossRef]
- Liu, S.; Liu, P.X.; Wang, X. Stochastic small-signal stability analysis of grid-connected photovoltaic systems. IEEE Trans. Ind. Electron. 2016, 63, 1027–1038. [Google Scholar] [CrossRef]
- Gurung, S.; Naetiladdanon, S.; Sangswang, A. Impact of photovoltaic penetration on small signal stability considering uncertainties. In Proceedings of the 2017 IEEE Innovative Smart Grid Technologies-Asia (ISGT-Asia), Auckland, New Zealand, 4–7 December 2017; pp. 1–6. [Google Scholar]
- Huang, H.; Chung, C. Coordinated damping control design for DFIG-based wind generation considering power output variation. IEEE Trans. Power Syst. 2012, 27, 1916–1925. [Google Scholar] [CrossRef]
- Shah, R.; Mithulananthan, N.; Lee, K.Y. Large-scale PV plant with a robust controller considering power oscillation damping. IEEE Trans. Energy Convers. 2013, 28, 106–116. [Google Scholar] [CrossRef]
- Aneke, M.; Wang, M. Energy storage technologies and real life applications—A state of the art review. Appl. Energy 2016, 179, 350–377. [Google Scholar] [CrossRef]
- Shi, L.; Lee, K.Y.; Wu, F. Robust ESS-based stabilizer design for damping inter-area oscillations in multimachine power systems. IEEE Trans. Power Syst. 2016, 31, 1395–1406. [Google Scholar] [CrossRef]
- Sui, X.; Tang, Y.; He, H.; Wen, J. Energy-storage-based low-frequency oscillation damping control using particle swarm optimization and heuristic dynamic programming. IEEE Trans. Power Syst. 2014, 29, 2539–2548. [Google Scholar] [CrossRef]
- Silva-Saravia, H.; Pulgar-Painemal, H.; Mauricio, J.M. Flywheel energy storage model, control and location for improving stability: The Chilean case. IEEE Trans. Power Syst. 2017, 32, 3111–3119. [Google Scholar] [CrossRef]
- Setiadi, H.; Krismanto, A.U.; Mithulananthan, N.; Hossain, M. Modal interaction of power systems with high penetration of renewable energy and BES systems. Int. J. Electr. Power Energy Syst. 2018, 97, 385–395. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, C.; Sun, K.; Shi, D.; Wang, Z. Optimization of Battery Energy Storage to Improve Power System Oscillation Damping. IEEE Trans. Sustain. Energy 2018. [Google Scholar] [CrossRef]
- Wang, Z.; Chung, C.; Wong, K.; Tse, C. Robust power system stabiliser design under multi-operating conditions using differential evolution. IET Gener. Transm. Distrib. 2008, 2, 690–700. [Google Scholar] [CrossRef]
- Ke, D.; Chung, C. Design of probabilistically-robust wide-area power system stabilizers to suppress inter-area oscillations of wind integrated power systems. IEEE Trans. Power Syst. 2016, 31, 4297–4309. [Google Scholar] [CrossRef]
- Rueda, J.L.; Cepeda, J.C.; Erlich, I. Probabilistic approach for optimal placement and tuning of power system supplementary damping controllers. IET Gener. Transm. Distrib. 2014, 8, 1831–1842. [Google Scholar] [CrossRef]
- Bian, X.; Geng, Y.; Lo, K.L.; Fu, Y.; Zhou, Q. Coordination of PSSs and SVC damping controller to improve probabilistic small-signal stability of power system with wind farm integration. IEEE Trans. Power Syst. 2016, 31, 2371–2382. [Google Scholar] [CrossRef]
- Slowik, A.; Kwasnicka, H. Nature Inspired Methods and Their Industry Applications—Swarm Intelligence Algorithms. IEEE Trans. Ind. Inform. 2018, 14, 1004–1015. [Google Scholar] [CrossRef]
- Yang, X.S. Cuckoo search and firefly algorithm: Overview and analysis. In Cuckoo Search and Firefly Algorithm; Springer: New York, NY, USA, 2014; pp. 1–26. [Google Scholar]
- PowerFactory, D. 15, User Manual; DIGSILENT GmbH: Gomaringen, Germany, 2016. [Google Scholar]
- Zhang, P.; Lee, S.T. Probabilistic load flow computation using the method of combined cumulants and Gram-Charlier expansion. IEEE Trans. Power Syst. 2004, 19, 676–682. [Google Scholar] [CrossRef]
- Preece, R.; Huang, K.; Milanović, J.V. Probabilistic small-disturbance stability assessment of uncertain power systems using efficient estimation methods. IEEE Trans. Power Syst. 2014, 29, 2509–2517. [Google Scholar] [CrossRef]
- Zulkifli, N.; Razali, N.; Marsadek, M.; Ramasamy, A. Probabilistic analysis of solar photovoltaic output based on historical data. In Proceedings of the 2014 IEEE 8th International Power Engineering and Optimization Conference (PEOCO), Langkawi, Malaysia, 24–25 March 2014; pp. 133–137. [Google Scholar]
- Ran, X.; Miao, S. Three-phase probabilistic load flow for power system with correlated wind, photovoltaic and load. IET Gener. Transm. Distrib. 2016, 10, 3093–3101. [Google Scholar] [CrossRef]
- Breuer, C.; Engelhardt, C.; Moser, A. Expectation-based reserve capacity dimensioning in power systems with an increasing intermittent feed-in. In Proceedings of the 2013 10th International Conference on the European Energy Market (EEM), Stockholm, Sweden, 27–31 May 2013; pp. 1–7. [Google Scholar]
- Soroudi, A.; Aien, M.; Ehsan, M. A probabilistic modeling of photo voltaic modules and wind power generation impact on distribution networks. IEEE Syst. J. 2012, 6, 254–259. [Google Scholar] [CrossRef]
- Kundur, P.; Balu, N.J.; Lauby, M.G. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994; Volume 7. [Google Scholar]
- Castillo, A.; Gayme, D.F. Grid-scale energy storage applications in renewable energy integration: A survey. Energy Convers. Manag. 2014, 87, 885–894. [Google Scholar] [CrossRef]
- Rodrigues, E.; Osório, G.; Godina, R.; Bizuayehu, A.; Lujano-Rojas, J.; Matias, J.; Catalão, J. Modelling and sizing of NaS (sodium sulfur) battery energy storage system for extending wind power performance in Crete Island. Energy 2015, 90, 1606–1617. [Google Scholar] [CrossRef]
- Yao, W.; Jiang, L.; Wen, J.; Wu, Q.; Cheng, S. Wide-area damping controller of FACTS devices for inter-area oscillations considering communication time delays. IEEE Trans. Power Syst. 2014, 29, 318–329. [Google Scholar] [CrossRef]
- Mokhtari, M.; Aminifar, F. Toward wide-area oscillation control through doubly-fed induction generator wind farms. IEEE Trans. Power Syst. 2014, 29, 2985–2992. [Google Scholar] [CrossRef]
- Pal, B.; Chaudhuri, B. Robust Control in Power Systems; Springer Science & Business Media: New York, NY, USA, 2006. [Google Scholar]
- Ruan, S.Y.; Li, G.J.; Ooi, B.T.; Sun, Y.Z. Power system damping from real and reactive power modulations of voltage-source-converter station. IET Gener. Transm. Distrib. 2008, 2, 311–320. [Google Scholar] [CrossRef]
- Canizares, C.; Fernandes, T.; Geraldi, E., Jr.; Gérin-Lajoie, L.; Gibbard, M.; Hiskens, I.; Kersulis, J.; Kuiava, R.; Lima, L.; Marco, F.; et al. Benchmark Systems for Small Signal Stability Analysis and Control. 2015. Available online: http://resourcecenter.ieee-pes.org/pes/product/technical-reports/PESTR18 (accessed on 5 March 2019).
- Adrees, A.; Milanovic, J.V. Study of frequency response in power system with renewable generation and energy storage. In Proceedings of the 2016 IEEE Power Systems Computation Conference (PSCC), Genoa, Italy, 20–24 June 2016; pp. 1–7. [Google Scholar]
- Knap, V.; Chaudhary, S.K.; Stroe, D.I.; Swierczynski, M.; Craciun, B.I.; Teodorescu, R. Sizing of an energy storage system for grid inertial response and primary frequency reserve. IEEE Trans. Power Syst. 2016, 31, 3447–3456. [Google Scholar] [CrossRef]
- Zuo, J.; Li, Y.; Shi, D.; Duan, X. Simultaneous robust coordinated damping control of power system stabilizers (PSSs), static var compensator (SVC) and doubly-fed induction generator power oscillation dampers (DFIG PODs) in multimachine power systems. Energies 2017, 10, 565. [Google Scholar]
- Nise, N.S. Control Systems Engineering, (with CD); John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Damping Constant | Damping Factor | Frequency (Hz) | Associated Areas |
|---|---|---|---|---|
| 1 | −0.0102 | 0.0450 | 0.3607 | 2, 4 and 5 |
| 2 | −0.0700 | 0.0164 | 0.6792 | 4 and 5 |
| 3 | −0.0912 | 0.0183 | 0.7922 | 3 and 4 |
| No. | No Controllers | PSSs | BESS Controllers | PSSs and BESS Controllers | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 100 | 0 | 95.9100 | 0 | 0 | 0 | 0 |
| 2 | 96.5000 | 100 | 90.6403 | 100 | 0 | 0 | 0 | 0 |
| 3 | 92.0600 | 100 | 95.4195 | 100 | 0 | 0 | 0 | 0 |
| 4 | 94.4200 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| 5 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| . | " | " | " | " | " | " | " | " |
| 15 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| Repeated Evaluations | ||||
|---|---|---|---|---|
| 50 | 0.4136 | 0.2 | 1 | 30 |
| No. | No Controllers | PSSs | BESS Controllers | PSSs and BESS Controllers | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 100 | 0 | 97.9797 | 0 | 0 | 0 | 0 |
| 2 | 96.5000 | 100 | 94.3965 | 100 | 0 | 0 | 0 | 0 |
| 3 | 92.0600 | 100 | 97.5650 | 100 | 0 | 0 | 0 | 0 |
| 4 | 94.4200 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| 5 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 2.7340 |
| 6 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 2.2390 |
| . | " | " | " | " | " | " | " | " |
| 15 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| No. | Details | Applied Disturbance for Time-Domain Simulation |
|---|---|---|
| 1 | Disconnection of critical Line 53–54 | Outage of Line 53–54 at 10 s |
| 2 | Increase load of the whole system by 4% | Outage of Line 53–54 at 10 s |
| 3 | Increase generation of the whole system by 4% | Outage of Line 53–54 at 10 s |
| No. | No Controllers | PSSs | BESS Controllers | PSSs and BESS Controllers | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 100 | 0 | 98.9374 | 0 | 0 | 0 | 0 |
| 2 | 100 | 100 | 6.0612 | 100 | 0 | 0 | 0 | 0 |
| 3 | 96.4595 | 100 | 93.4344 | 100 | 0 | 0 | 0 | 0 |
| 4 | 98.9926 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| 5 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| . | " | " | " | " | " | " | " | " |
| 15 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| No. | No Controllers | PSSs | BESS Controllers | PSSs and BESS Controllers | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 100 | 93.7333 | 100 | 0 | 0 | 0 | 0 |
| 2 | 100 | 100 | 98.1607 | 100 | 0 | 0 | 0 | 0 |
| 3 | 97.1333 | 100 | 0 | 0 | 0 | 0 | 0 | 0 |
| 4 | 98.5768 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| 5 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| . | " | " | " | " | " | " | " | " |
| 15 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| No. | No Controllers | PSSs | BESS Controllers | PSSs and BESS Controllers | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 100 | 100 | 100 | 0 | 0 | 0 | 0 |
| 2 | 96.8426 | 100 | 1.0060 | 100 | 0 | 0 | 0 | 0 |
| 3 | 95.1850 | 100 | 95.5373 | 100 | 0 | 0 | 0 | 0 |
| 4 | 98.2310 | 100 | 0 | 0 | 97.8950 | 100 | 0 | 0 |
| 5 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| . | " | " | " | " | " | " | " | " |
| 15 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| No. | No Controllers | PSSs | BESS Controllers | PSSs and BESS Controllers | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 100 | 3.2220 | 97.1100 | 0 | 0 | 0 | 0 |
| 2 | 100 | 100 | 2.0290 | 100 | 2.6651 | 0 | 0 | 0 |
| 3 | 96.4595 | 100 | 98.3940 | 100 | 0 | 0 | 0 | 0 |
| 4 | 98.9926 | 100 | 0 | 0 | 0 | 100 | 1.8995 | 0 |
| 5 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| . | " | " | " | " | " | " | " | " |
| 15 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| No. | No Controllers | PSSs | BESS Controllers | PSSs and BESS Controllers | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 100 | 99.0866 | 100 | 0 | 0 | 0 | 0 |
| 2 | 100 | 100 | 99.3710 | 100 | 0 | 0 | 0 | 0 |
| 3 | 97.1333 | 100 | 0 | 0 | 0 | 0 | 0 | 2.8950 |
| 4 | 98.5768 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| 5 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| . | " | " | " | " | " | " | " | " |
| 15 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| No. | No Controllers | PSSs | BESS Controllers | PSSs and BESS Controllers | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 100 | 100 | 100 | 100 | 0 | 0 | 0 | 0 |
| 2 | 96.8426 | 100 | 1.8218 | 100 | 0 | 0 | 0 | 0 |
| 3 | 95.1850 | 100 | 100 | 100 | 0 | 0 | 0 | 0 |
| 4 | 98.2310 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| 5 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| . | " | " | " | " | " | " | " | " |
| 15 | 0 | 100 | 0 | 0 | 0 | 100 | 0 | 0 |
| Scenario | No Controllers | PSSs | BESS Controllers | PSSs and BESS Controllers | ||||
|---|---|---|---|---|---|---|---|---|
| (s) | ||||||||
| 1 | - | - | 5.1581 | 19.3900 | 6.8738 | 26.0372 | 5.1398 | 12.9783 |
| 2 | - | - | 5.3265 | 19.8046 | 8.1256 | 25.0869 | 5.2671 | 13.0508 |
| 3 | - | - | 4.7237 | 19.3348 | 6.1518 | 29.9032 | 4.6581 | 13.1429 |
| Scenario | No Controllers | PSSs | BESS Controllers | PSSs and BESS Controllers | ||||
|---|---|---|---|---|---|---|---|---|
| (s) | ||||||||
| 1 | - | - | 7.2815 | 22.4320 | 6.9164 | 32.0292 | 9.9199 | 20.8999 |
| 2 | - | - | 9.1993 | 20.8999 | 7.6818 | 29.7599 | 7.5793 | 18.2493 |
| 3 | - | - | 6.7955 | 27.9364 | 6.2899 | 31.2617 | 6.7386 | 17.3451 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gurung, S.; Naetiladdanon, S.; Sangswang, A. Coordination of Power-System Stabilizers and Battery Energy-Storage System Controllers to Improve Probabilistic Small-Signal Stability Considering Integration of Renewable-Energy Resources. Appl. Sci. 2019, 9, 1109. https://doi.org/10.3390/app9061109
Gurung S, Naetiladdanon S, Sangswang A. Coordination of Power-System Stabilizers and Battery Energy-Storage System Controllers to Improve Probabilistic Small-Signal Stability Considering Integration of Renewable-Energy Resources. Applied Sciences. 2019; 9(6):1109. https://doi.org/10.3390/app9061109
Chicago/Turabian StyleGurung, Samundra, Sumate Naetiladdanon, and Anawach Sangswang. 2019. "Coordination of Power-System Stabilizers and Battery Energy-Storage System Controllers to Improve Probabilistic Small-Signal Stability Considering Integration of Renewable-Energy Resources" Applied Sciences 9, no. 6: 1109. https://doi.org/10.3390/app9061109
APA StyleGurung, S., Naetiladdanon, S., & Sangswang, A. (2019). Coordination of Power-System Stabilizers and Battery Energy-Storage System Controllers to Improve Probabilistic Small-Signal Stability Considering Integration of Renewable-Energy Resources. Applied Sciences, 9(6), 1109. https://doi.org/10.3390/app9061109