Research on a Rail Defect Location Method Based on a Single Mode Extraction Algorithm


Abstract
:1. Introduction
2. An Accurate Modal Identification Method
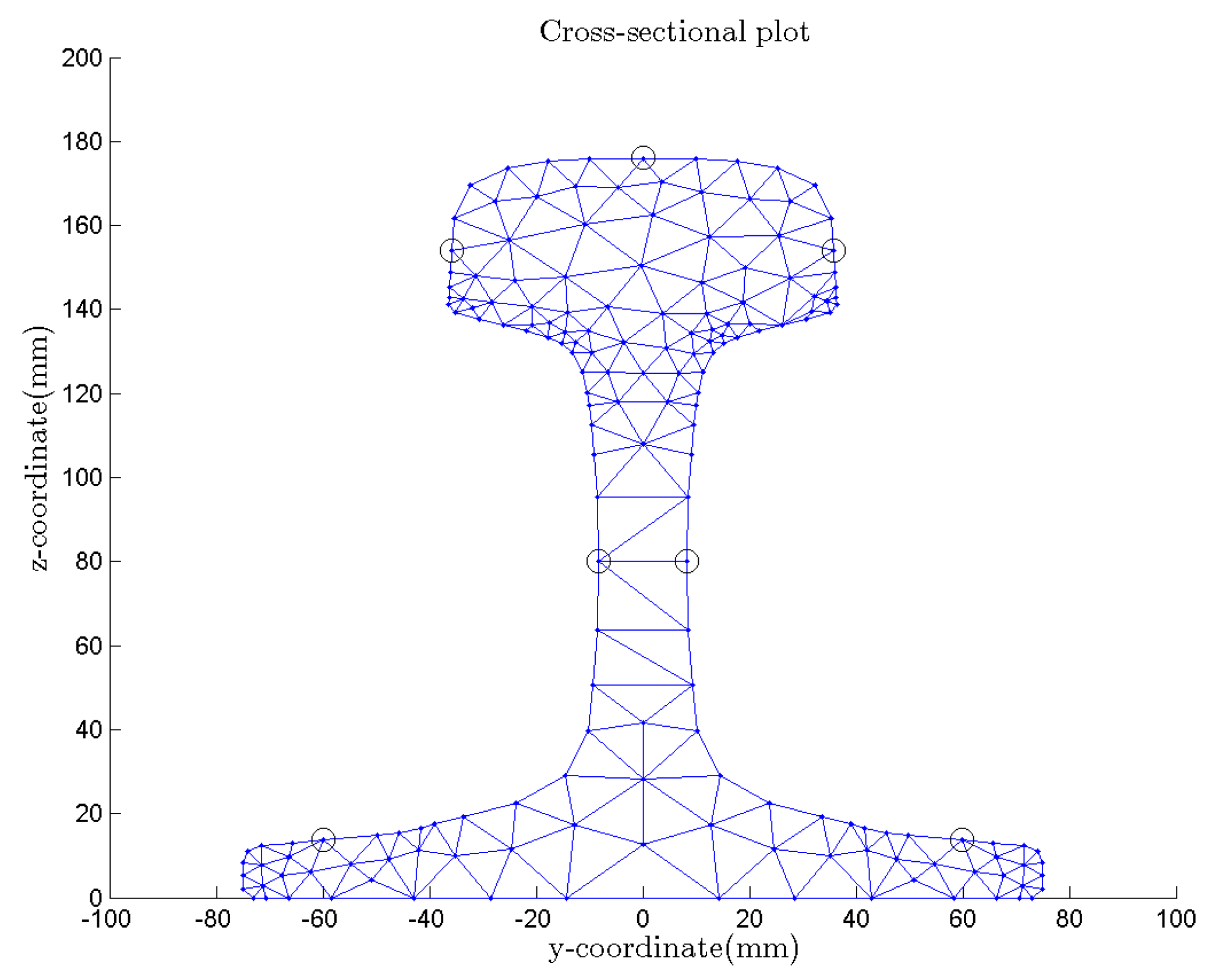
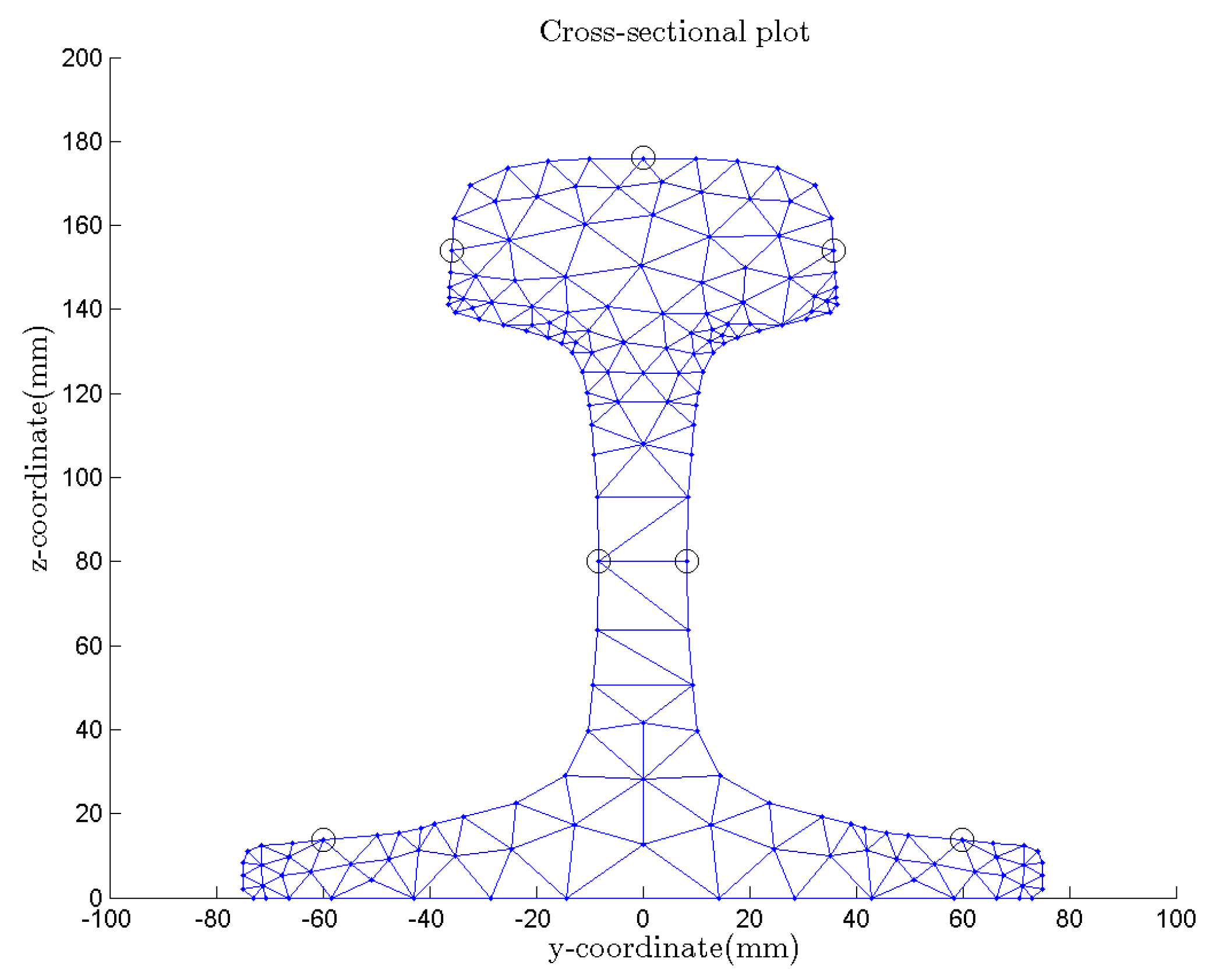
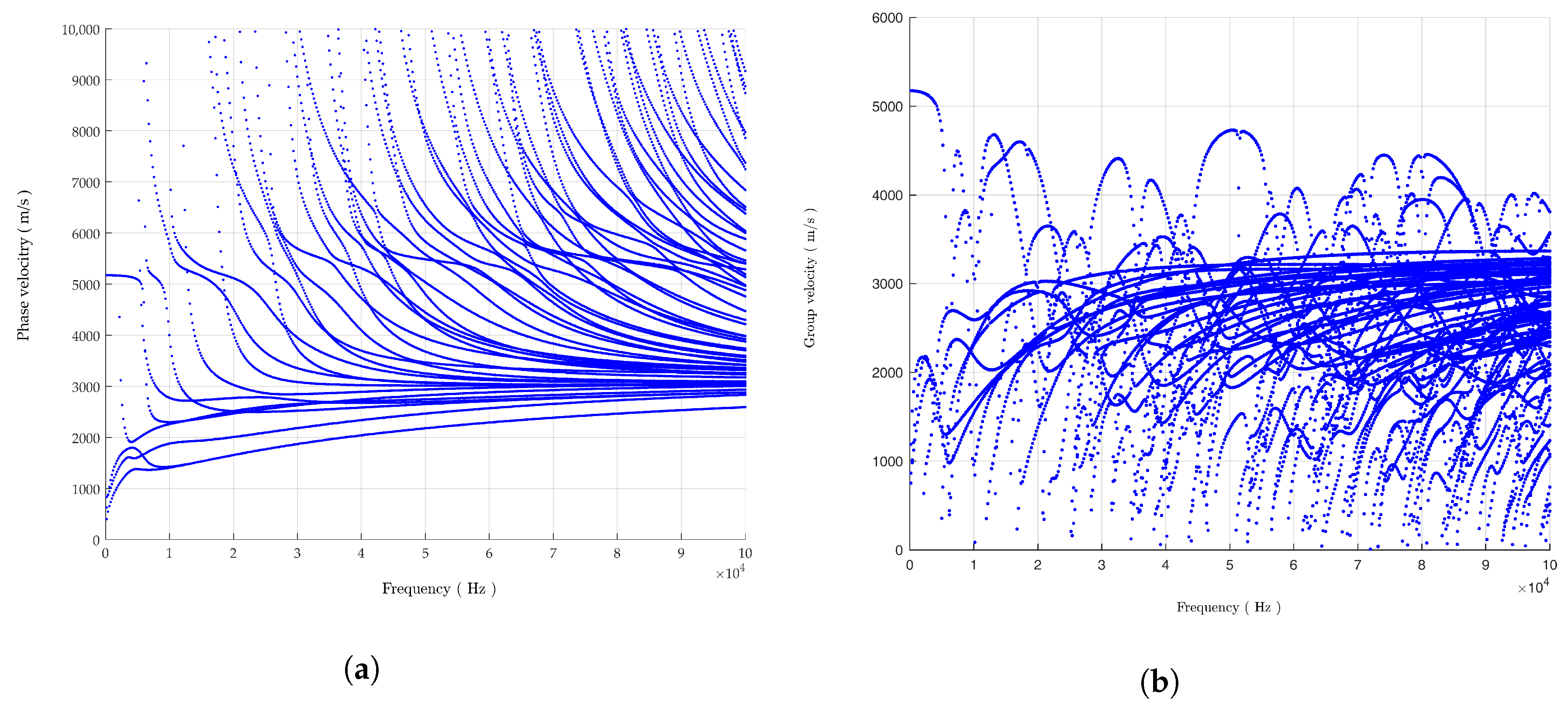
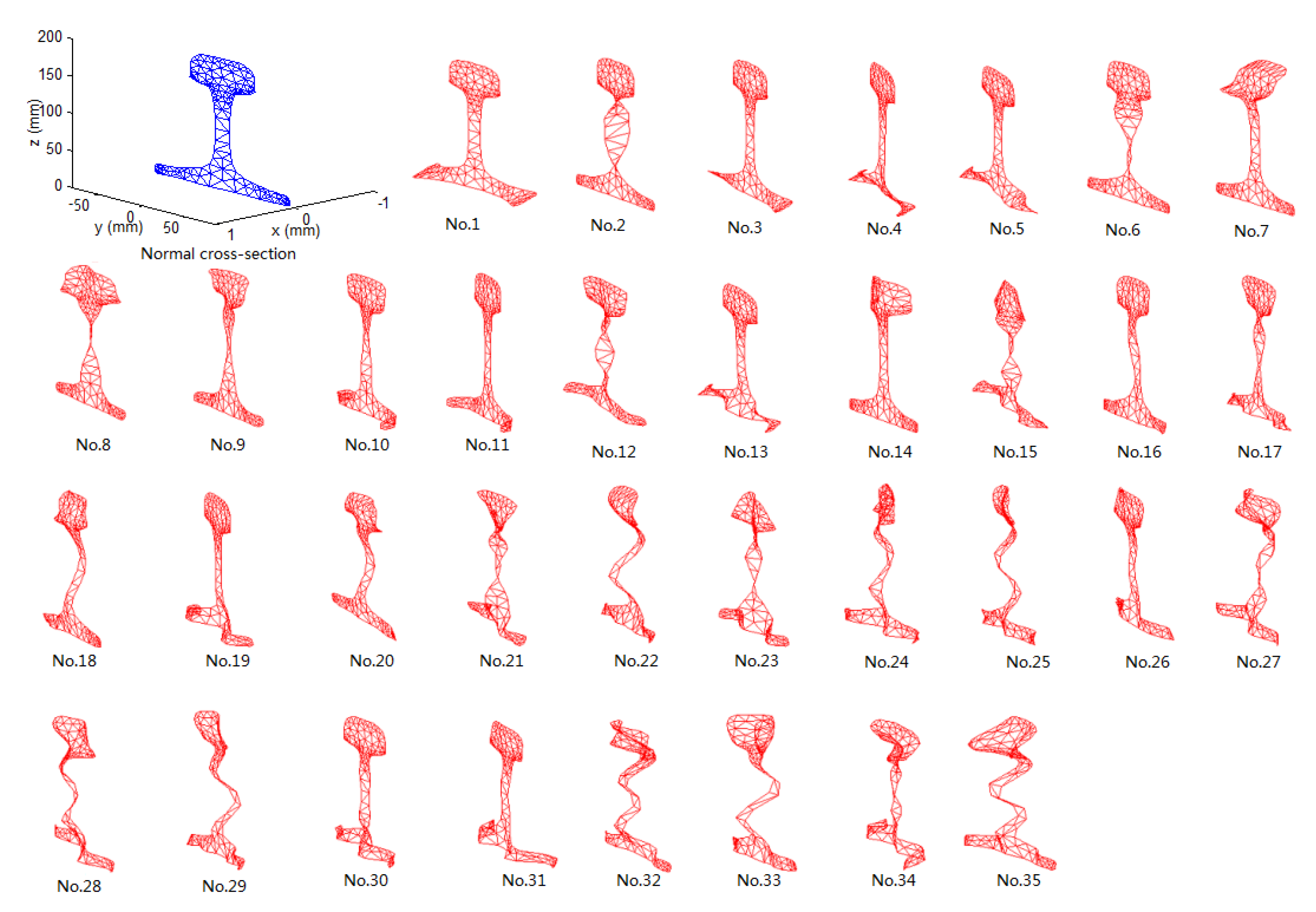
2.1. Basic Characteristics of Ultrasonic Guided Waves in Rails
2.2. Excitation Response Analysis of Rails
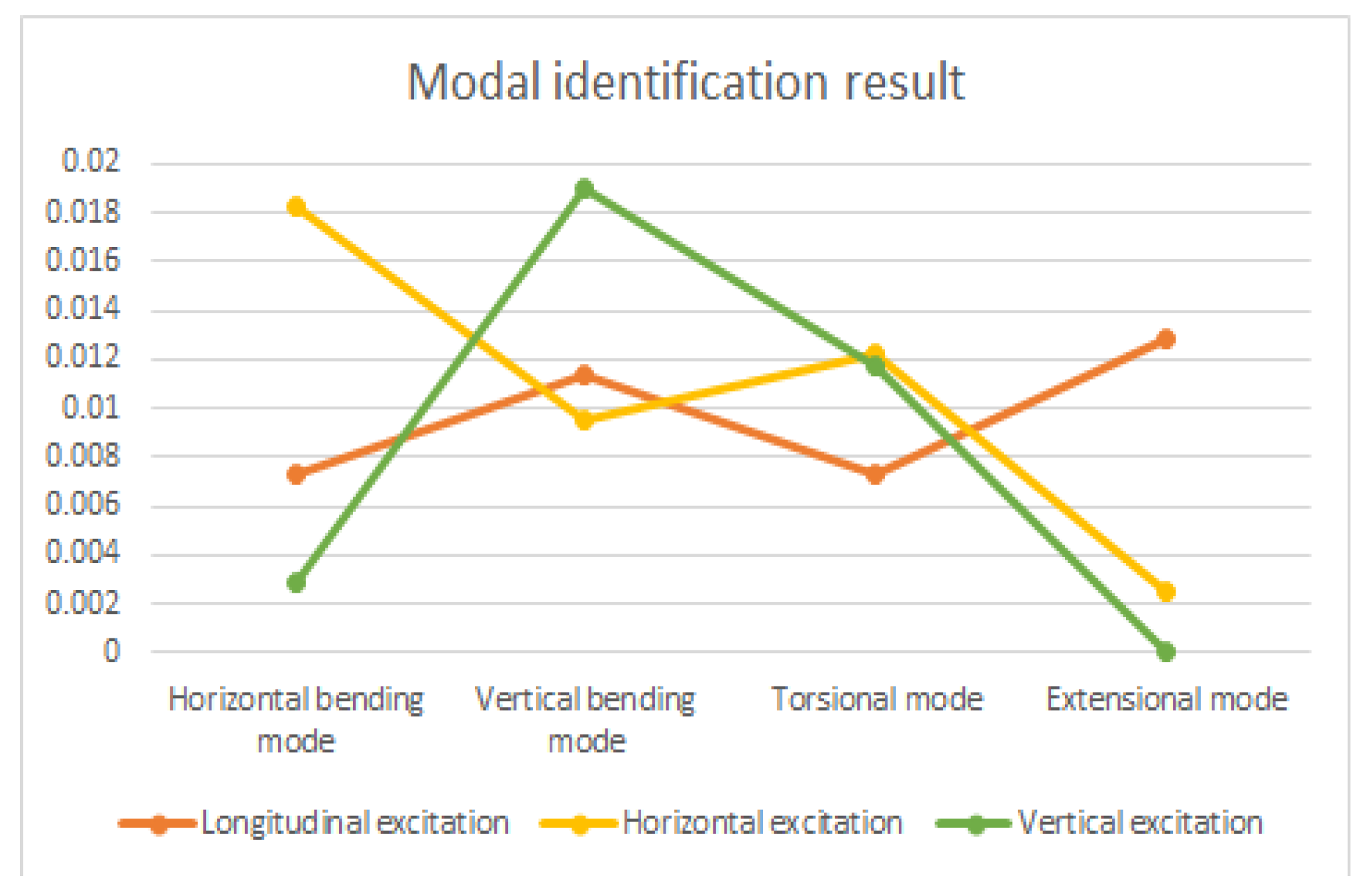
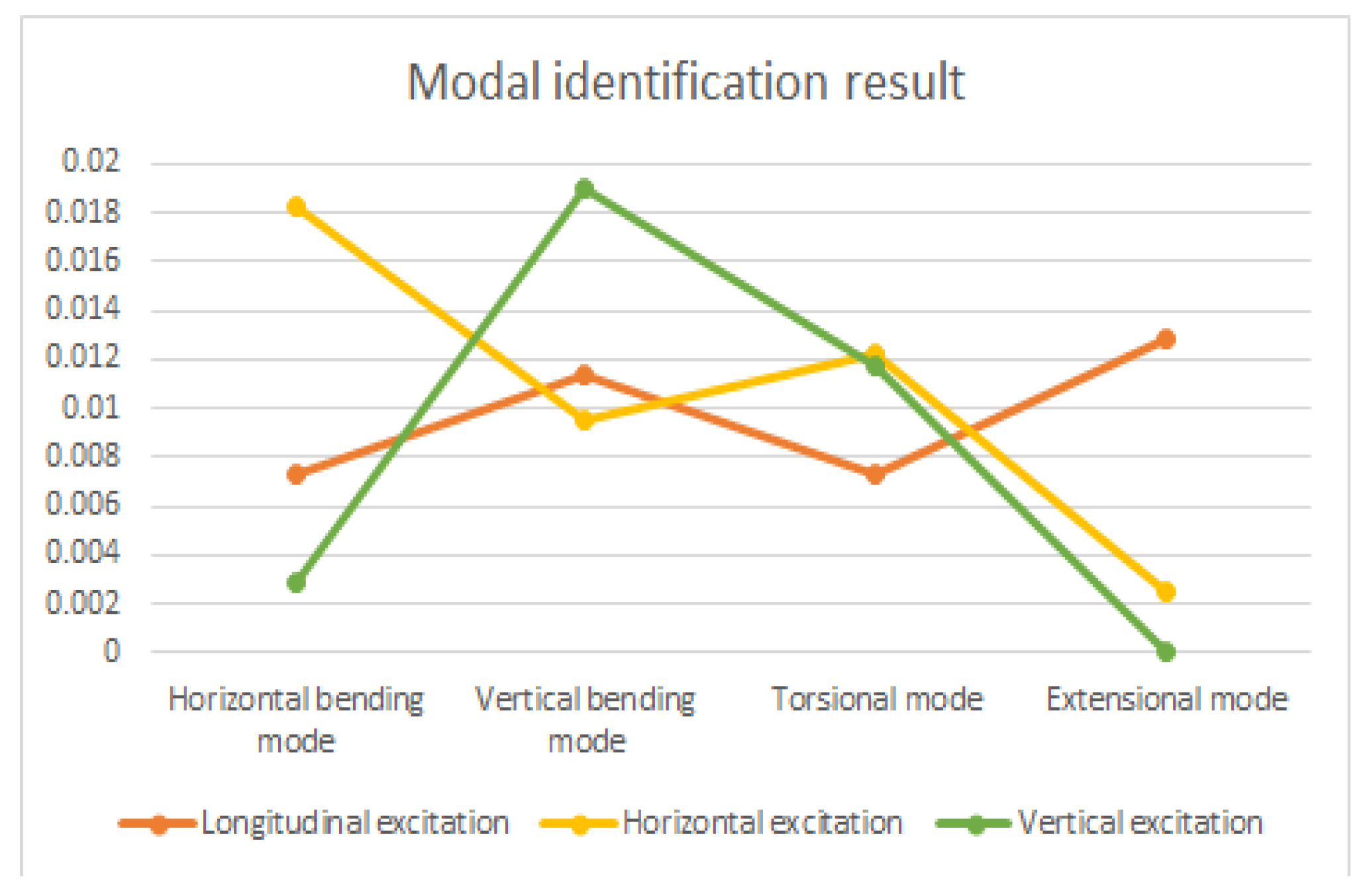
2.3. Modal Identification
2.3.1. Theoretical Derivation
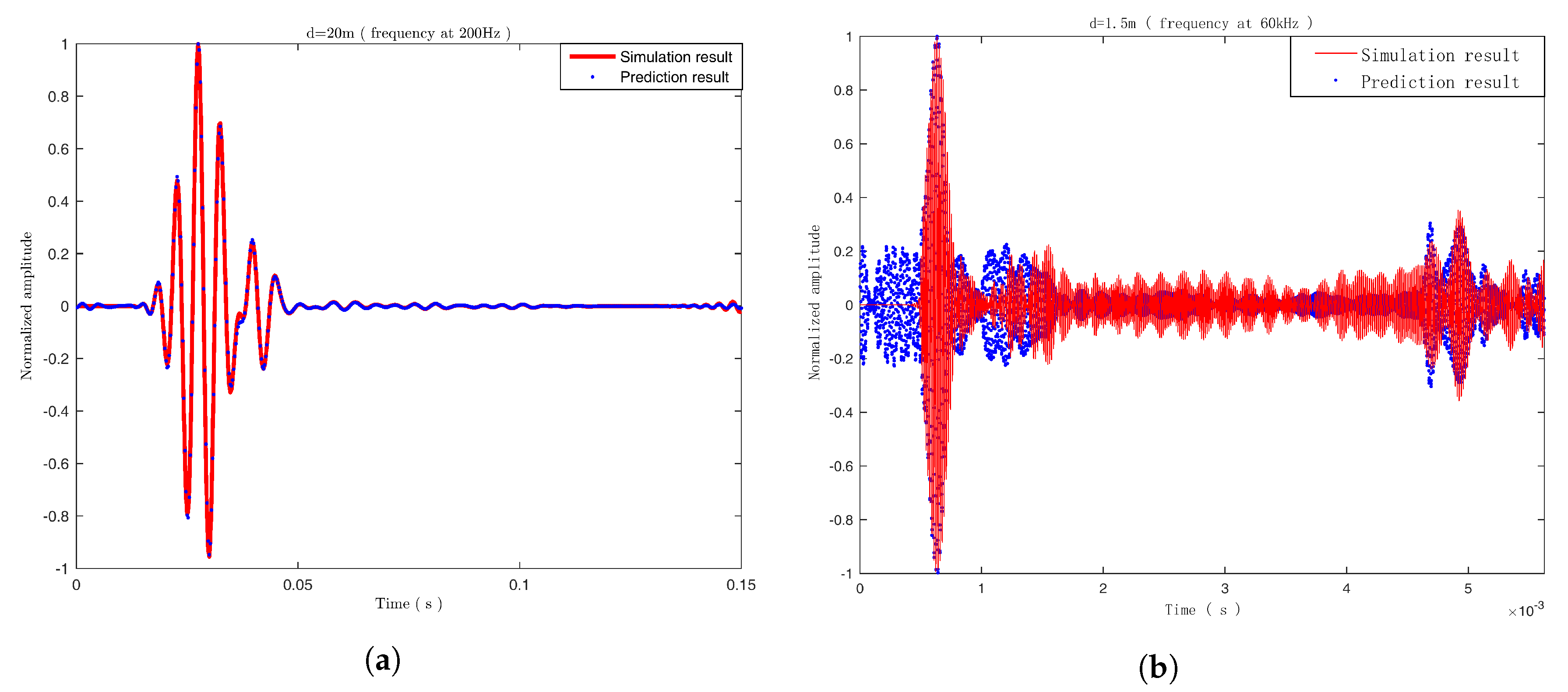
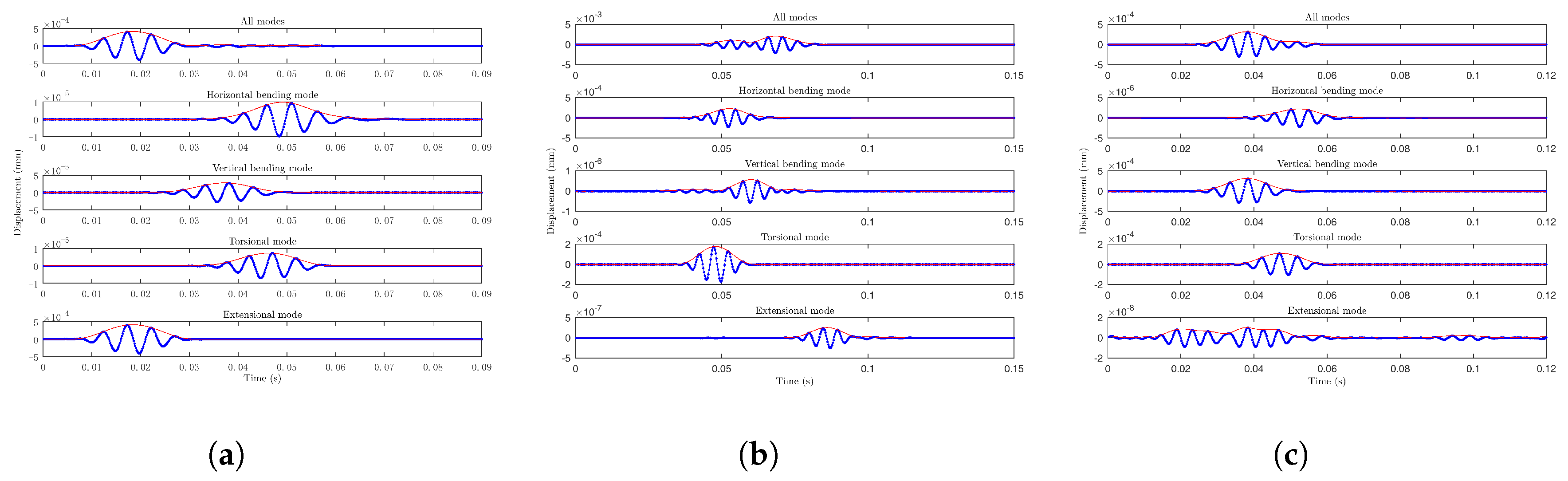
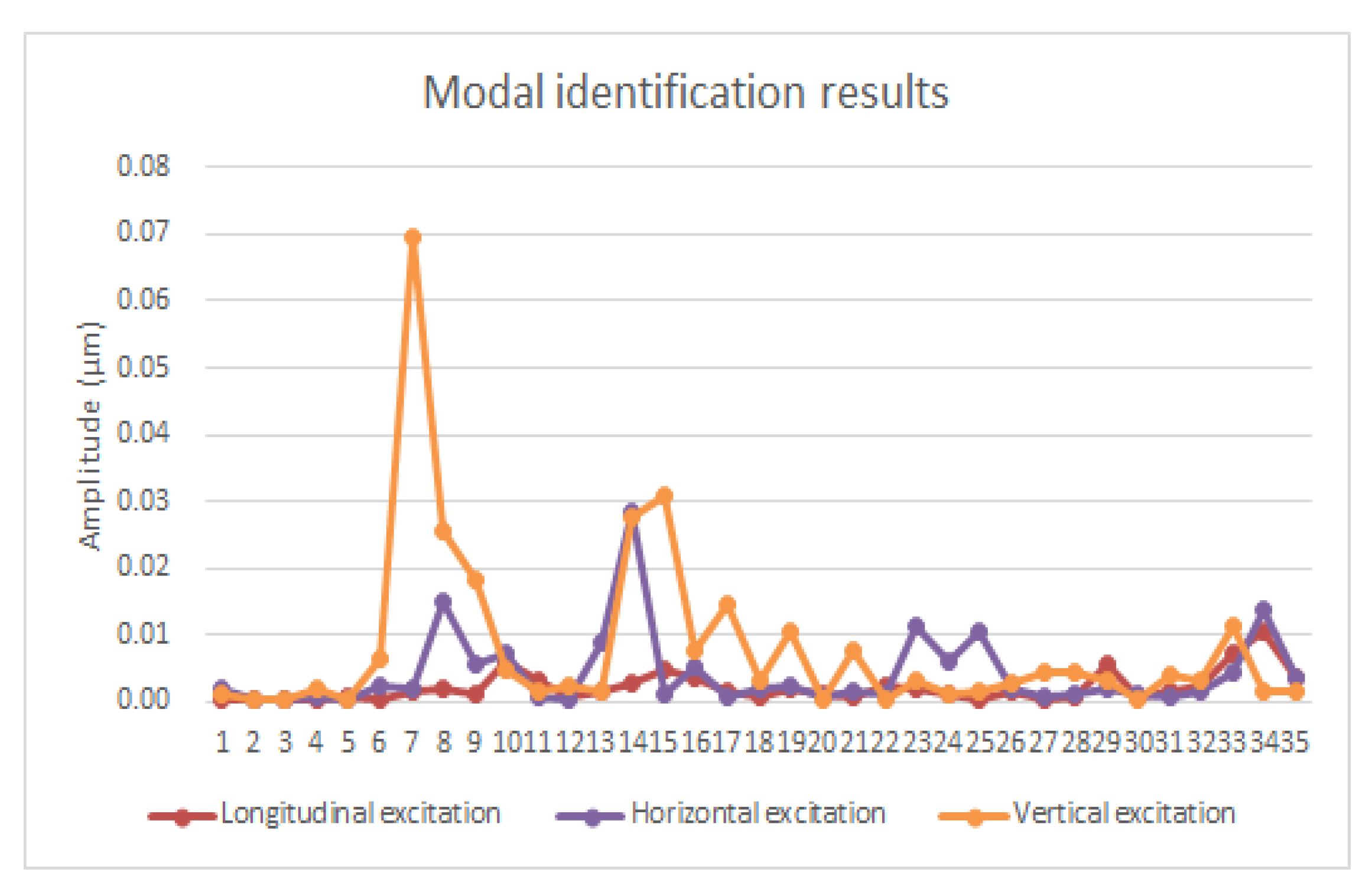
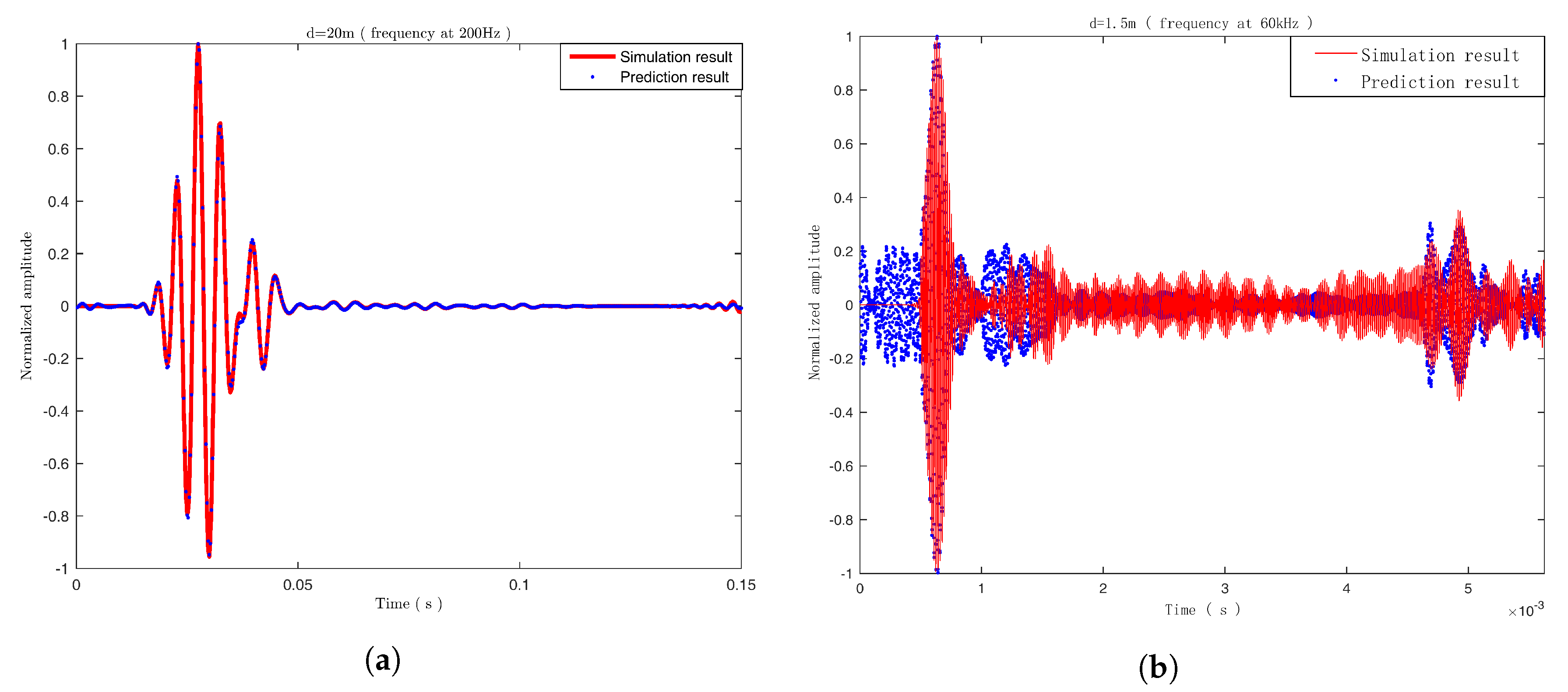
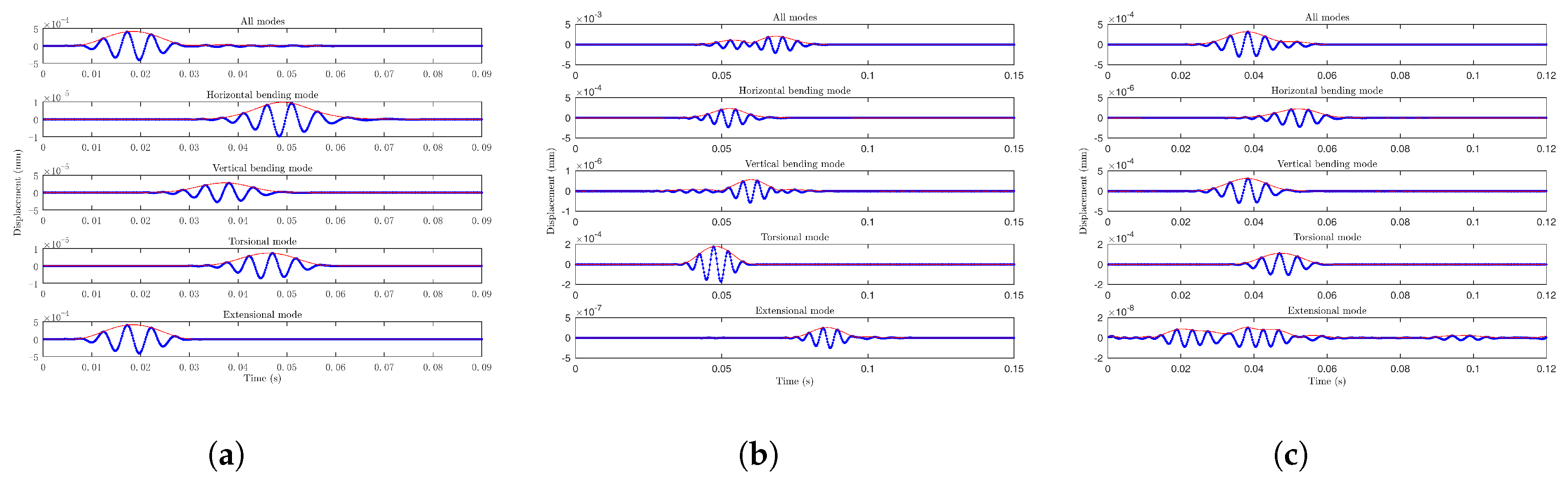
2.3.2. Simulation Analysis
3. Single Modal Extraction Algorithm
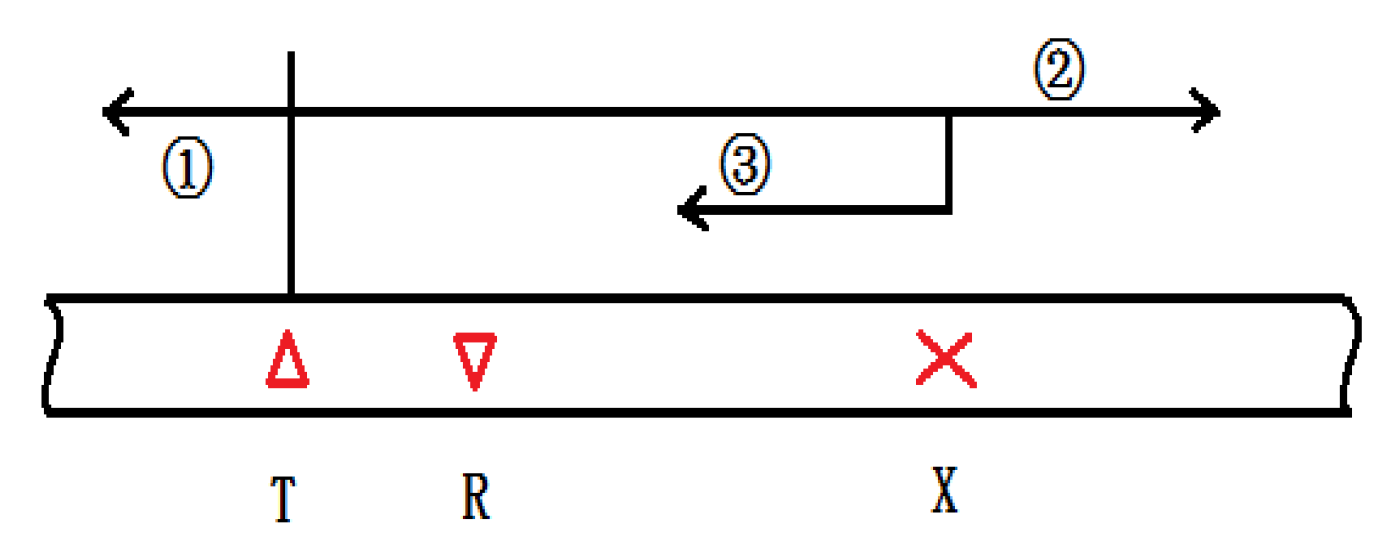
4. Defect Location
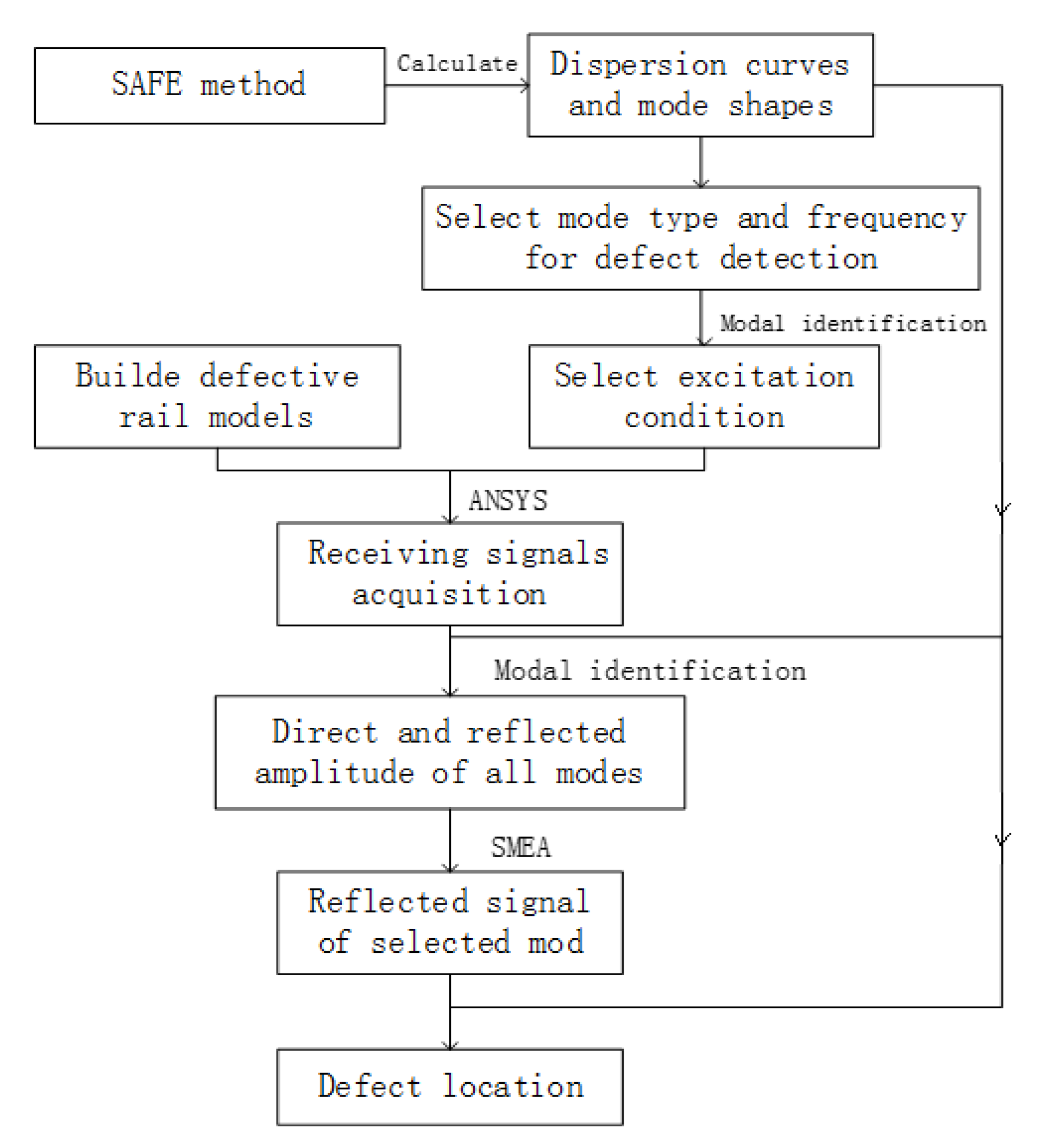
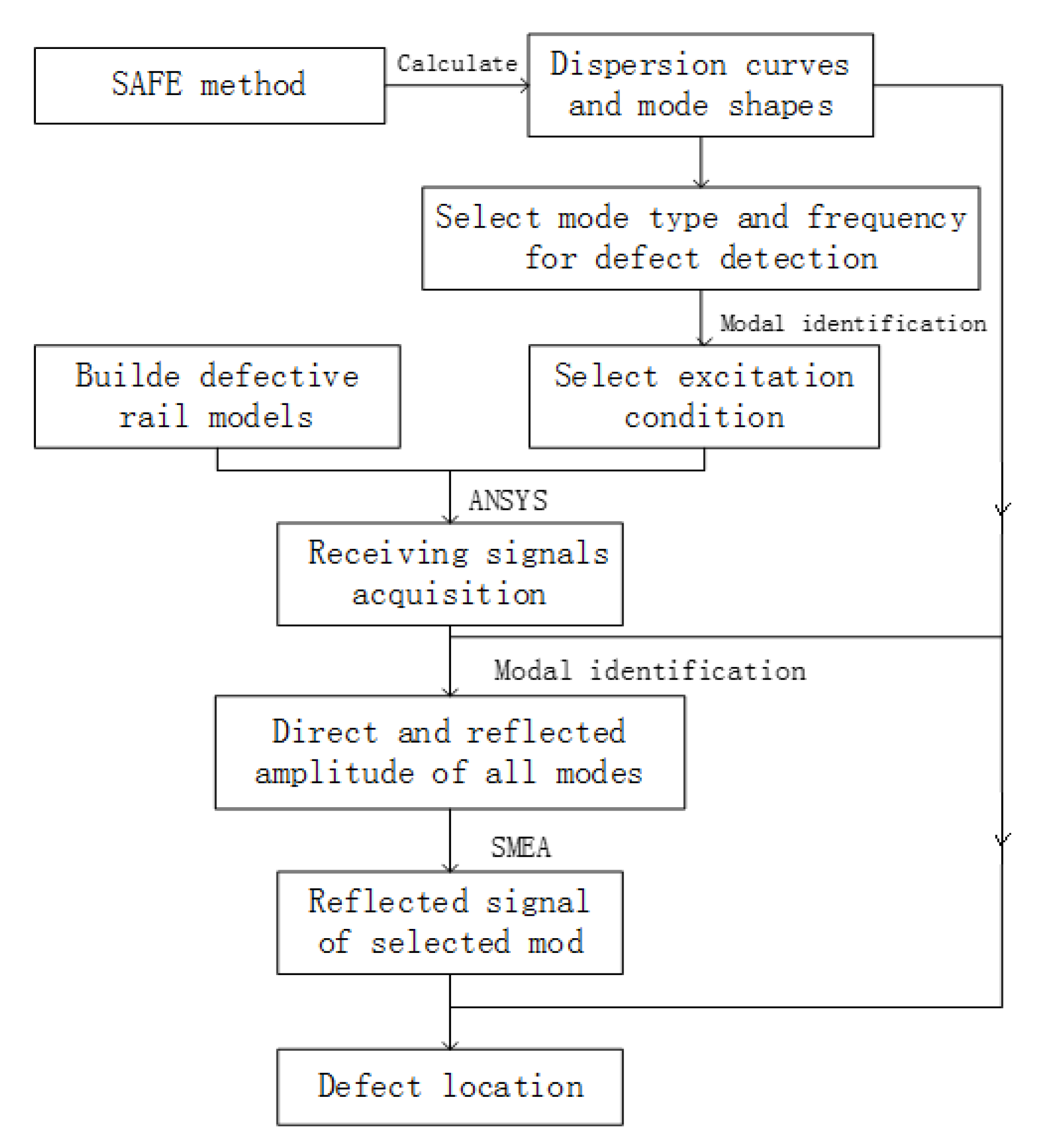
4.1. Selection of Mode, Frequency, and Excitation Conditions for Defect Detection
- The mode that only vibrates in the railhead with almost no movement of rail waist and rail bottom and which has a large group velocity is selected.
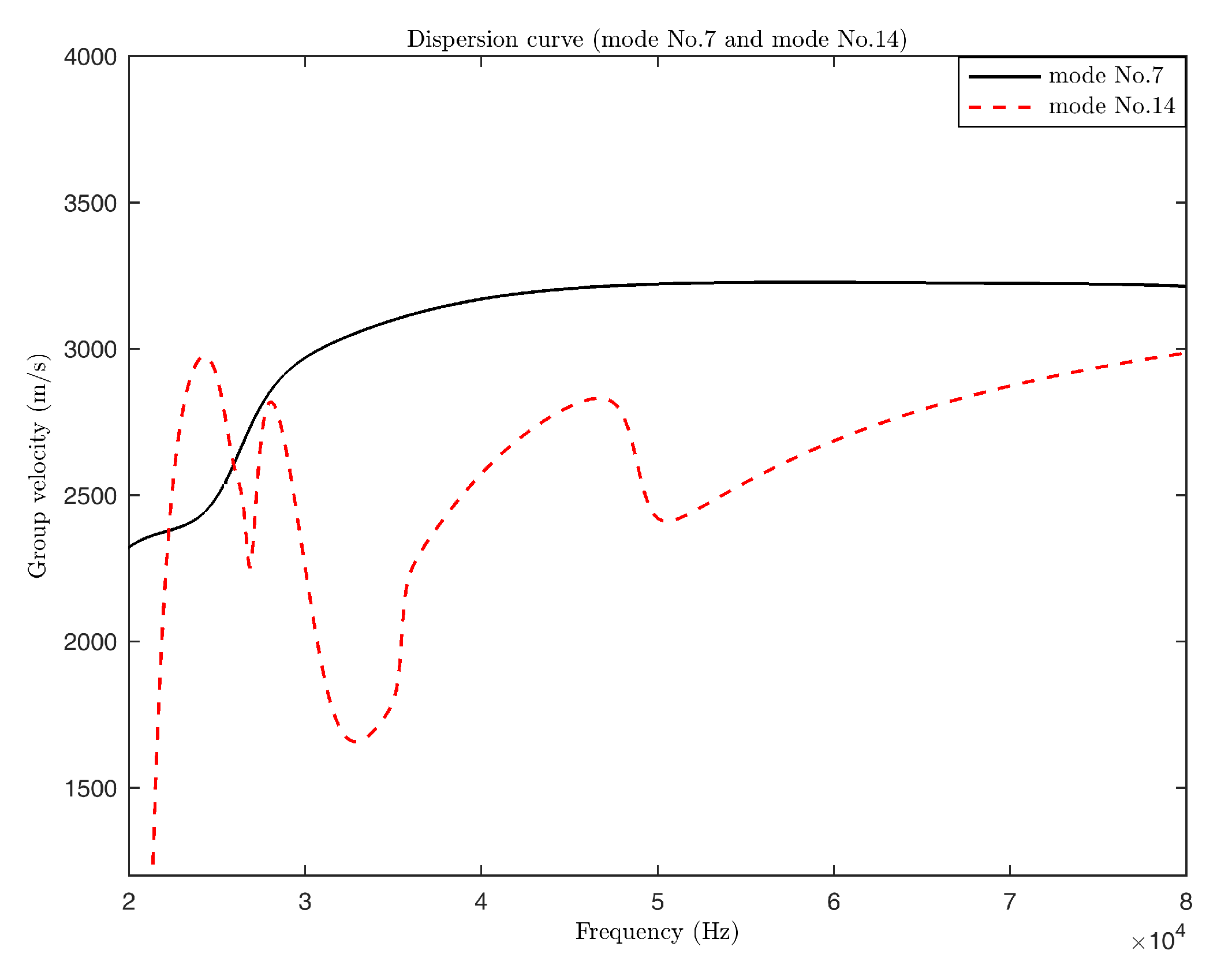
- The frequency band with better non-dispersive characteristics is selected.
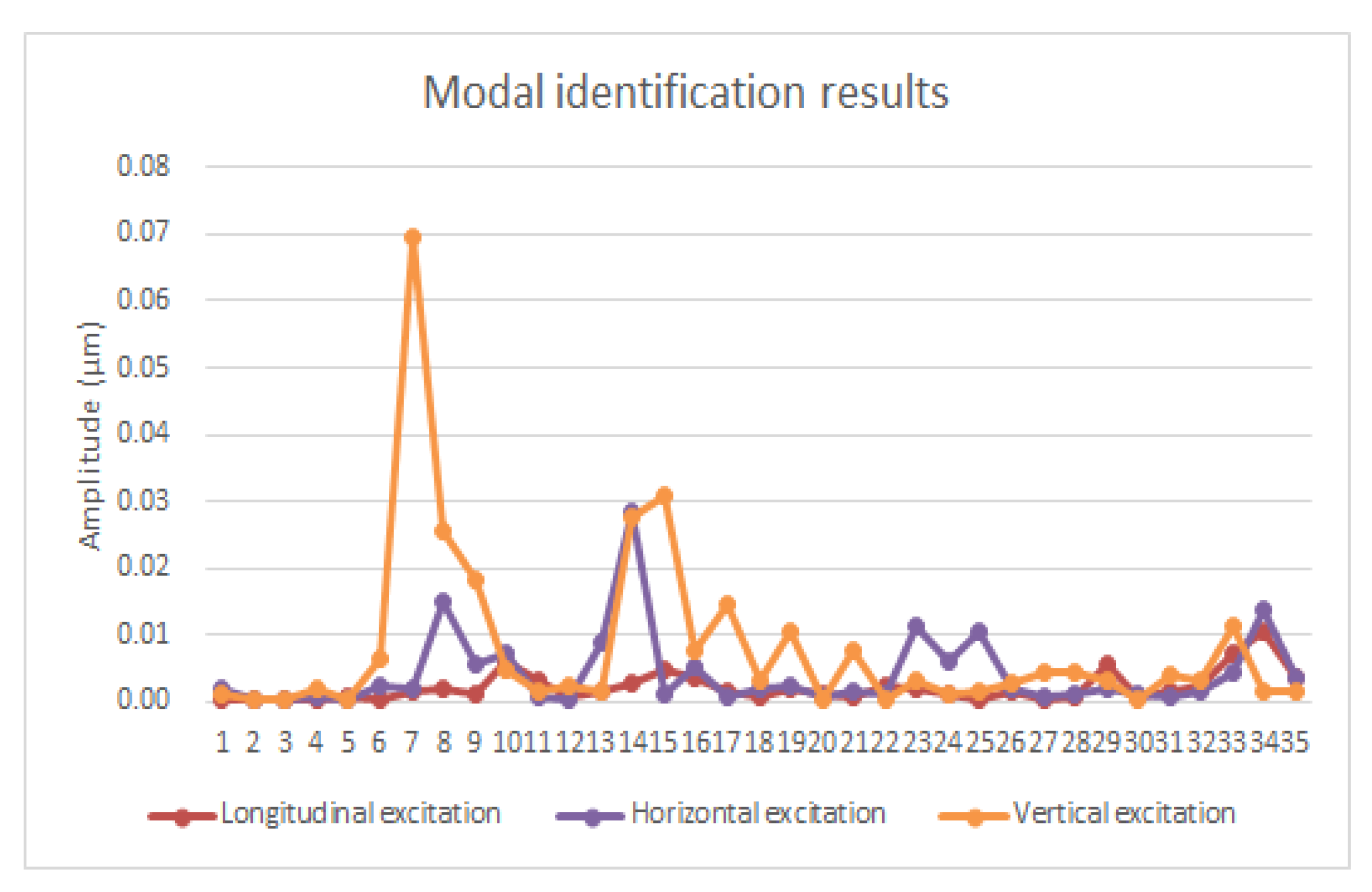
- The mode with the largest amplitude is selected as the excitation condition.
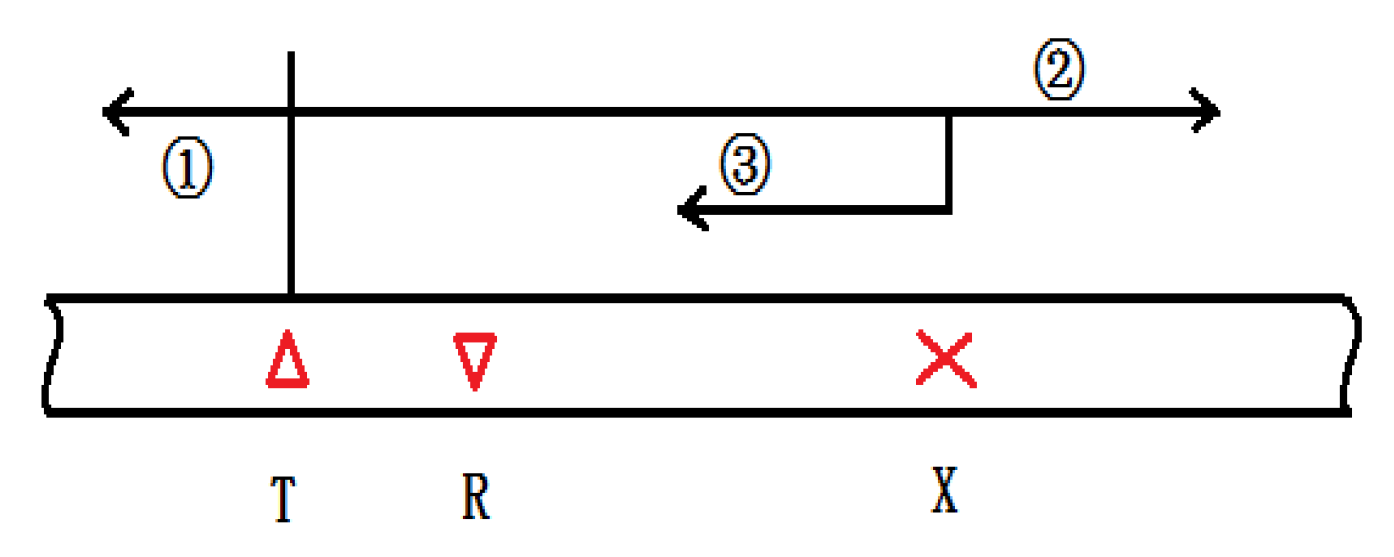
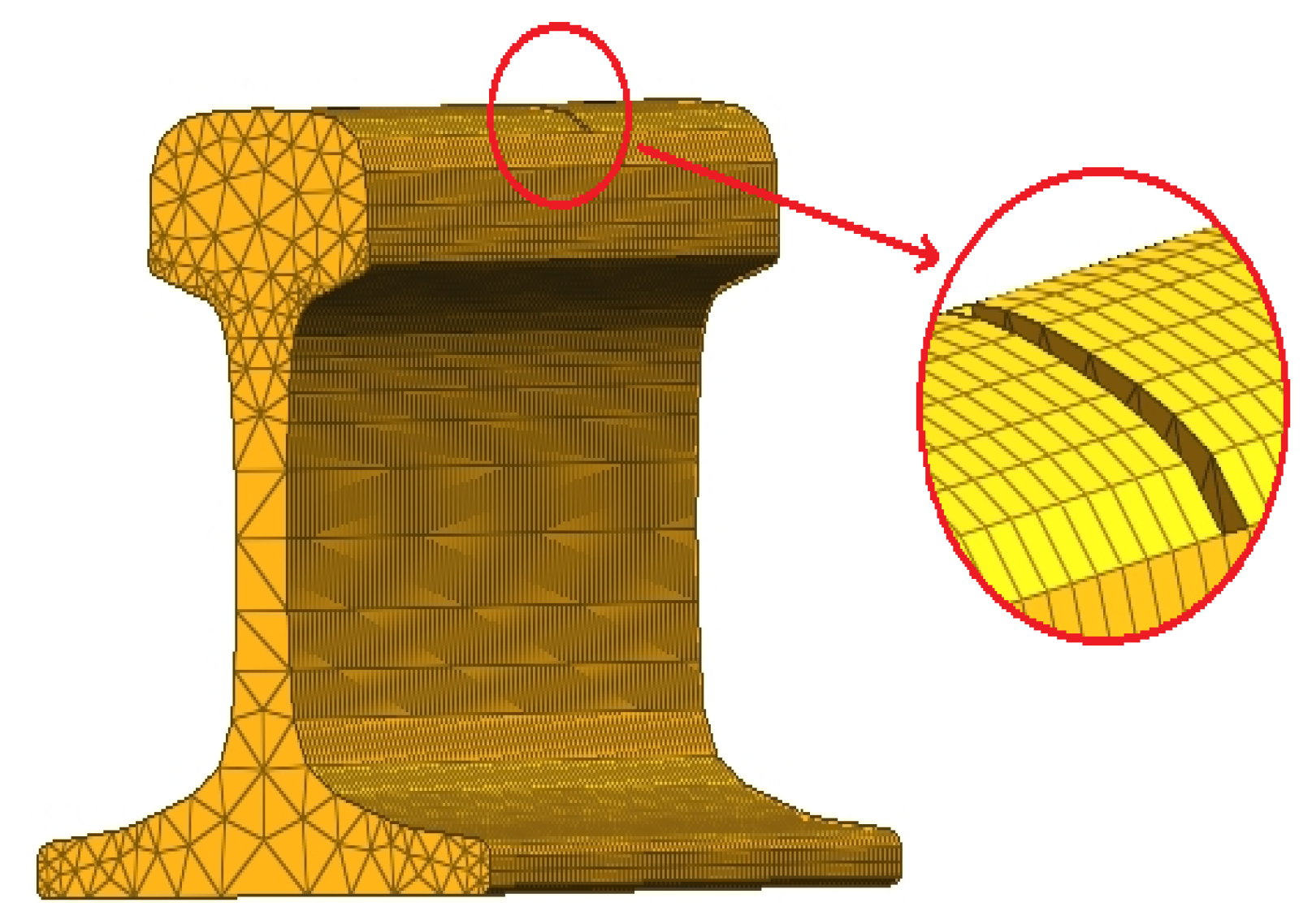
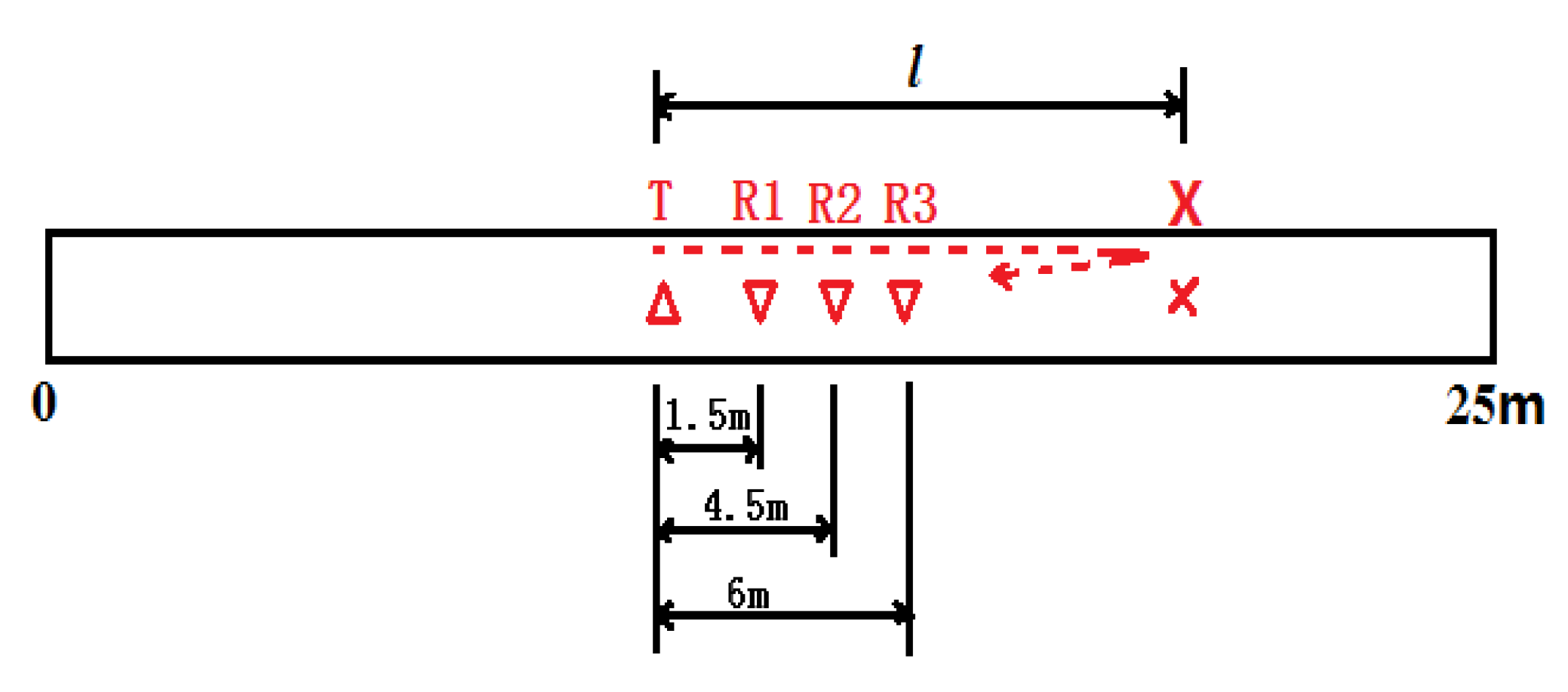
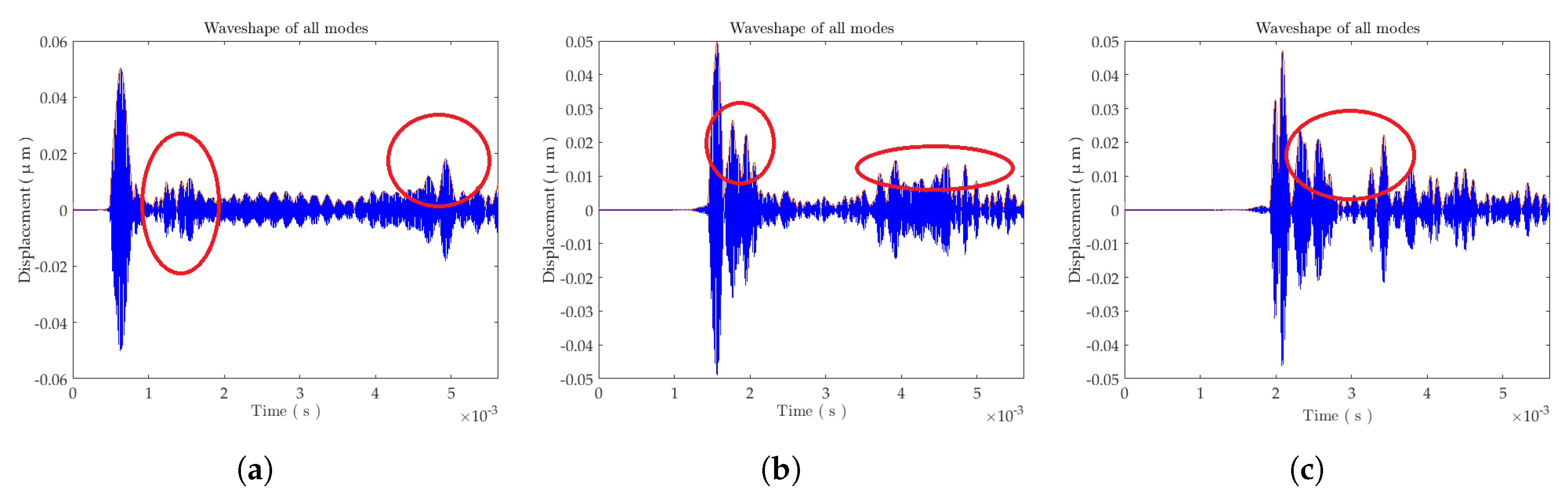
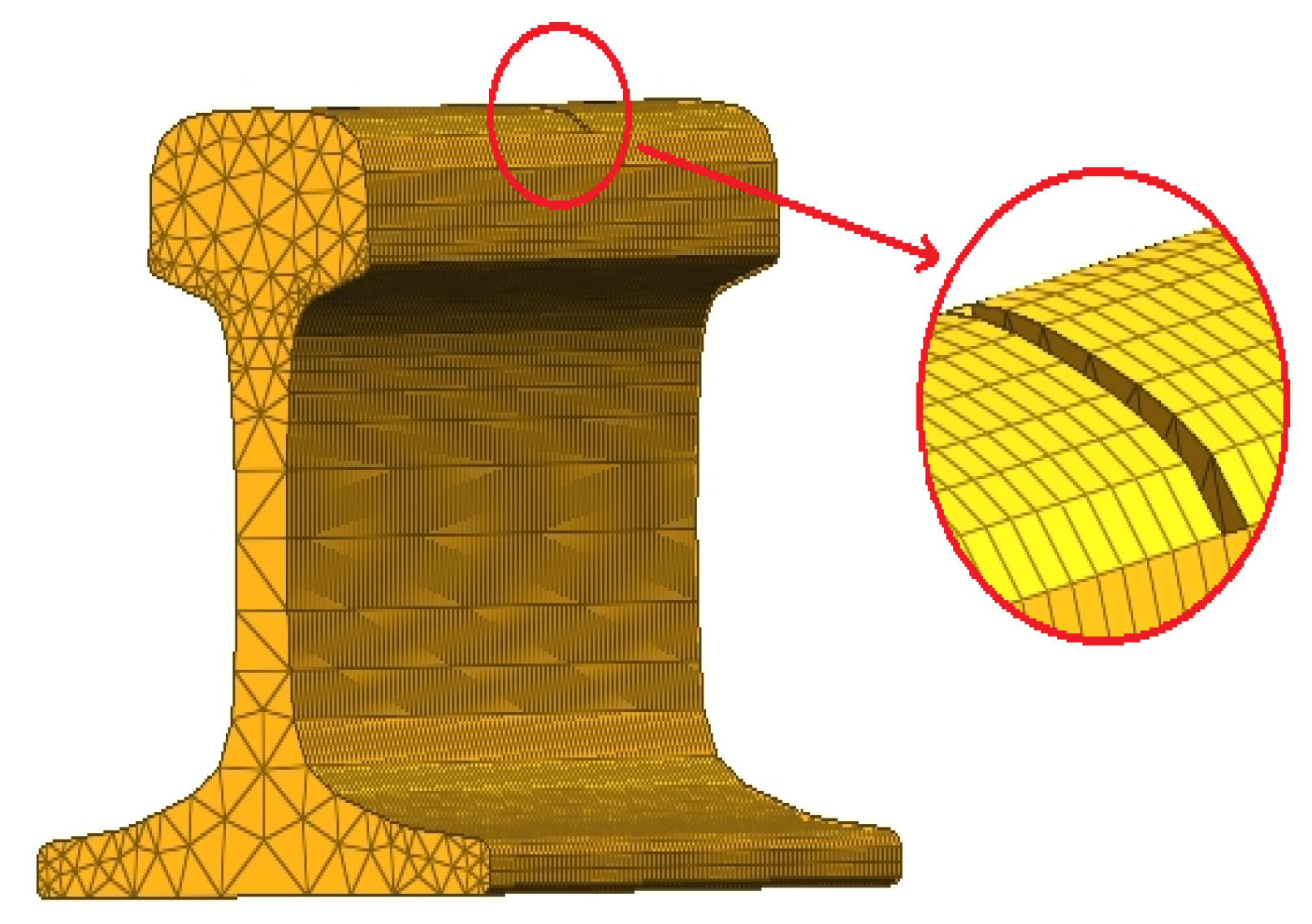
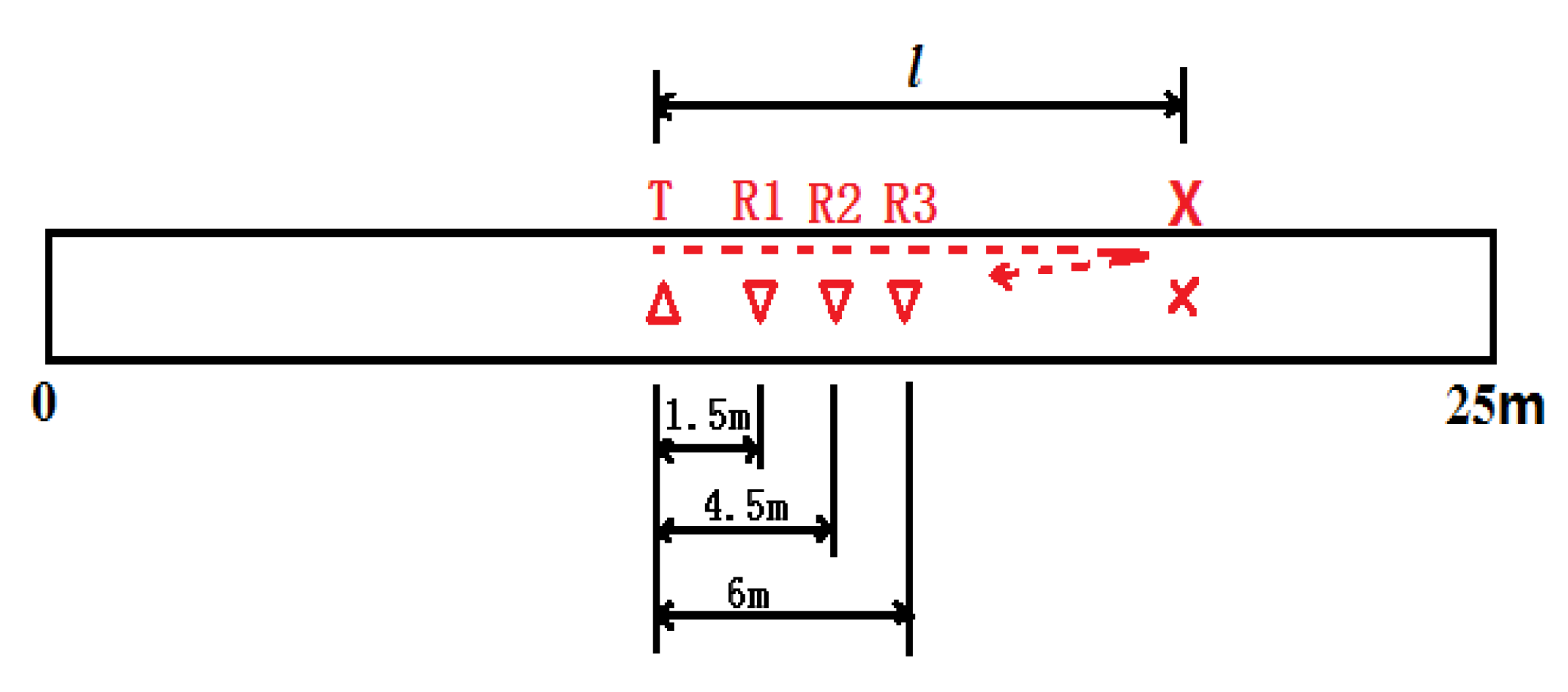
4.2. Simulation Analysis of Defect Location
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| SAFE | Semi-analytical finite element |
| SMEA | Single mode extraction algorithm |
References
- Loveday, P.W. Guided wave inspection and monitoring of railway track. J. Nondestruct. Eval. 2012, 31, 303–309. [Google Scholar] [CrossRef]
- Lee, C.; Rose, J.L.; Cho, Y. A guided wave approach to defect detection under shelling in rail. NDT E Int. 2009, 42, 174–180. [Google Scholar] [CrossRef]
- Rose, J.L.; Zhu, W.; Cho, Y. Boundary element modeling for guided wave reflection and transmission factor analyses in defect classification. In Proceedings of the 1998 IEEE Ultrasonics Symposium, Sendai, Japan, 5–8 October 1998; Volume 1, pp. 885–888. [Google Scholar]
- Harker, A.H. Numerical modelling of the scattering of elastic waves in plates. J. Nondestruct. Eval. 1984, 4, 89–106. [Google Scholar] [CrossRef]
- Moser, F.; Jacobs, L.J.; Qu, J. Modeling elastic wave propagation in waveguides with the finite element method. NDT E Int. 1999, 32, 225–234. [Google Scholar] [CrossRef]
- Gavrić, L. Computation of propagative waves in free rail using a finite element technique. J. Sound Vib. 1995, 185, 531–543. [Google Scholar] [CrossRef]
- Alleyne, D.; Cawley, P. A two-dimensional Fourier transform method for the measurement of propagating multimode signals. J. Acoust. Soc. Am. 1991, 89, 1159–1168. [Google Scholar] [CrossRef]
- Hayashi, T.; Song, W.; Rose, J.L. Guided wave dispersion curves for a bar with an arbitrary cross-section, a rod and rail example. Ultrasonics 2003, 41, 175–183. [Google Scholar] [CrossRef]
- He, C. Propagation characteristics of ultrasonic guided wave in rails based on vibration modal analysis. J. Vib. Shock 2014, 33, 9–13. [Google Scholar] [CrossRef]
- Loveday, P.W.; Long, C.S. Laser vibrometer measurement of guided wave modes in rail track. Ultrasonics 2015, 57, 209–217. [Google Scholar] [CrossRef] [PubMed]
- Loveday, P.W. Measurement of modal amplitudes of guided waves in rails. Proc. SPIE 2008, 6935, 1J-1–1J-8. [Google Scholar] [CrossRef]
- Loveday, P.W. Modeling and Measurement of Piezoelectric Ultrasonic Transducers for Transmitting Guided Waves in Rails. In Proceedings of the 2008 IEEE Ultrasonics Symposium, Beijing, China, 2–5 November 2008; pp. 410–413. [Google Scholar]
- Loveday, P.W.; Long, C.S. Modal amplitude extraction of guided waves in rails using scanning laser vibrometer measurements. Am. Inst. Phys. Conf. Ser. 2012, 1430, 182–189. [Google Scholar] [CrossRef]
- Loveday, P.W.; Long, C.S. Field measurement of guided wave modes in rail track. Am. Inst. Phys. Conf. Ser. 2013, 1511, 230–237. [Google Scholar] [CrossRef]
- Loveday, P.W.; Long, C.S.; Ramatlo, D.A. Mode repulsion of ultrasonic guided waves in rails. Ultrasonics 2017, 84, 341–349. [Google Scholar] [CrossRef] [PubMed]
- Chao, L.U.; Sheng, H.J.; Song, K.; Lin, J.M.; He, F. Ultrasonic Guided Wave Scattering Characteristics of Rail Base Oblique Cracks. Nondestruct. Test. 2016, 38, 18–25. [Google Scholar] [CrossRef]
- Zumpano, G.; Meo, M. A new damage detection technique based on wave propagation for rails. Int. J. Solids Struct. 2006, 43, 1023–1046. [Google Scholar] [CrossRef]
- Xu, X.; Zhuang, L.; Xing, B.; Yu, Z.; Zhu, L. An Ultrasonic Guided Wave Mode Excitation Method in Rails. IEEE Access 2018, 6, 60414–60428. [Google Scholar] [CrossRef]
- Jian, W.; Ping, W.; Ma, D. Matching performance of CHN60N rail with various wheel profiles for Chinese high-speed railway. IOP Conf. Ser. Mater. Sci. Eng. 2018, 383, 012041. [Google Scholar] [CrossRef]
- Zhang, Z.-T.; Yan, L.-S.; Wang, P.; Guo, L.-K.; Pan, W.; Zhang, Z.-Y. Key Techniques for Rail Strain Measurements Based on Fiber Bragg Grating Sensor. J. China Railw. Soc. 2012, 34, 65–69. [Google Scholar] [CrossRef]
- Bartoli, I.; Coccia, S.; Phillips, R.; Srivastava, A.; Scalea, F.L.D.; Salamone, S.; Fateh, M.; Carr, G. Stress dependence of guided waves in rails. Proc. SPIE 2010, 7650, 765021. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Direct Wave | Reflected Wave | Amplitude Reflection Coefficient |
|---|---|---|---|
| Horizontal bending mode | 3.20 × 10 | 3.04 × 10 | 9.5 × 10 |
| Vertical bending mode | 1.89 × 10 | 3.52 × 10 | 0.19 |
| Torsional mode | 1.17 × 10 | 4.58 × 10 | 3.9 × 10 |
| Extensional mode | 4.94 × 10 | 5.95 × 10 | 1.2 |
| Mode Number | Direct Wave | Reflected Wave | Amplitude Reflection Coefficient |
|---|---|---|---|
| 1 | 0.39 | 0.003 | 0.008 |
| 2 | 0.18 | 0.009 | 0.050 |
| 3 | 0.03 | 0.001 | 0.033 |
| 4 | 0.29 | 0.007 | 0.024 |
| 5 | 0.33 | 0.003 | 0.009 |
| 6 | 0.21 | 0.008 | 0.038 |
| 7 | 1.25 | 0.078 | 0.062 |
| 8 | 1.46 | 0.004 | 0.003 |
| 9 | 1.36 | 0.004 | 0.003 |
| 10 | 0.52 | 0.002 | 0.004 |
| 11 | 0.08 | 0.001 | 0.013 |
| 12 | 0.23 | 0.002 | 0.009 |
| 13 | 0.40 | 0.003 | 0.043 |
| 14 | 0.67 | 0.001 | 0.001 |
| 15 | 0.07 | 0.003 | 0.043 |
| 16 | 0.06 | 0.001 | 0.017 |
| 17 | 0.96 | 0.005 | 0.005 |
| 18 | 0.04 | 0 | 0 |
| 19 | 0.37 | 0.006 | 0.016 |
| 20 | 0.02 | 0.001 | 0.050 |
| 21 | 0.29 | 0.005 | 0.017 |
| 22 | 0.15 | 0.002 | 0.013 |
| 23 | 0.06 | 0.001 | 0.017 |
| 24 | 0.16 | 0.003 | 0.019 |
| 25 | 0.23 | 0.008 | 0.035 |
| 26 | 0.28 | 0.001 | 0.004 |
| 27 | 0.36 | 0.002 | 0.006 |
| 28 | 0.41 | 0.001 | 0.002 |
| 29 | 0.42 | 0.002 | 0.005 |
| 30 | 0.03 | 0.001 | 0.033 |
| 31 | 0.32 | 0 | 0 |
| 32 | 0.42 | 0 | 0 |
| 33 | 0.92 | 0 | 0 |
| 34 | 0.02 | 0 | 0 |
| 35 | 0.11 | 0 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, B.; Yu, Z.; Xu, X.; Zhu, L.; Shi, H. Research on a Rail Defect Location Method Based on a Single Mode Extraction Algorithm. Appl. Sci. 2019, 9, 1107. https://doi.org/10.3390/app9061107
Xing B, Yu Z, Xu X, Zhu L, Shi H. Research on a Rail Defect Location Method Based on a Single Mode Extraction Algorithm. Applied Sciences. 2019; 9(6):1107. https://doi.org/10.3390/app9061107
Chicago/Turabian StyleXing, Bo, Zujun Yu, Xining Xu, Liqiang Zhu, and Hongmei Shi. 2019. "Research on a Rail Defect Location Method Based on a Single Mode Extraction Algorithm" Applied Sciences 9, no. 6: 1107. https://doi.org/10.3390/app9061107
APA StyleXing, B., Yu, Z., Xu, X., Zhu, L., & Shi, H. (2019). Research on a Rail Defect Location Method Based on a Single Mode Extraction Algorithm. Applied Sciences, 9(6), 1107. https://doi.org/10.3390/app9061107