Simulation Study of Two Torque Optimization Methods for Direct Torque-Controlled Induction Motors



Abstract
1. Introduction
2. IM Torque Response Optimization
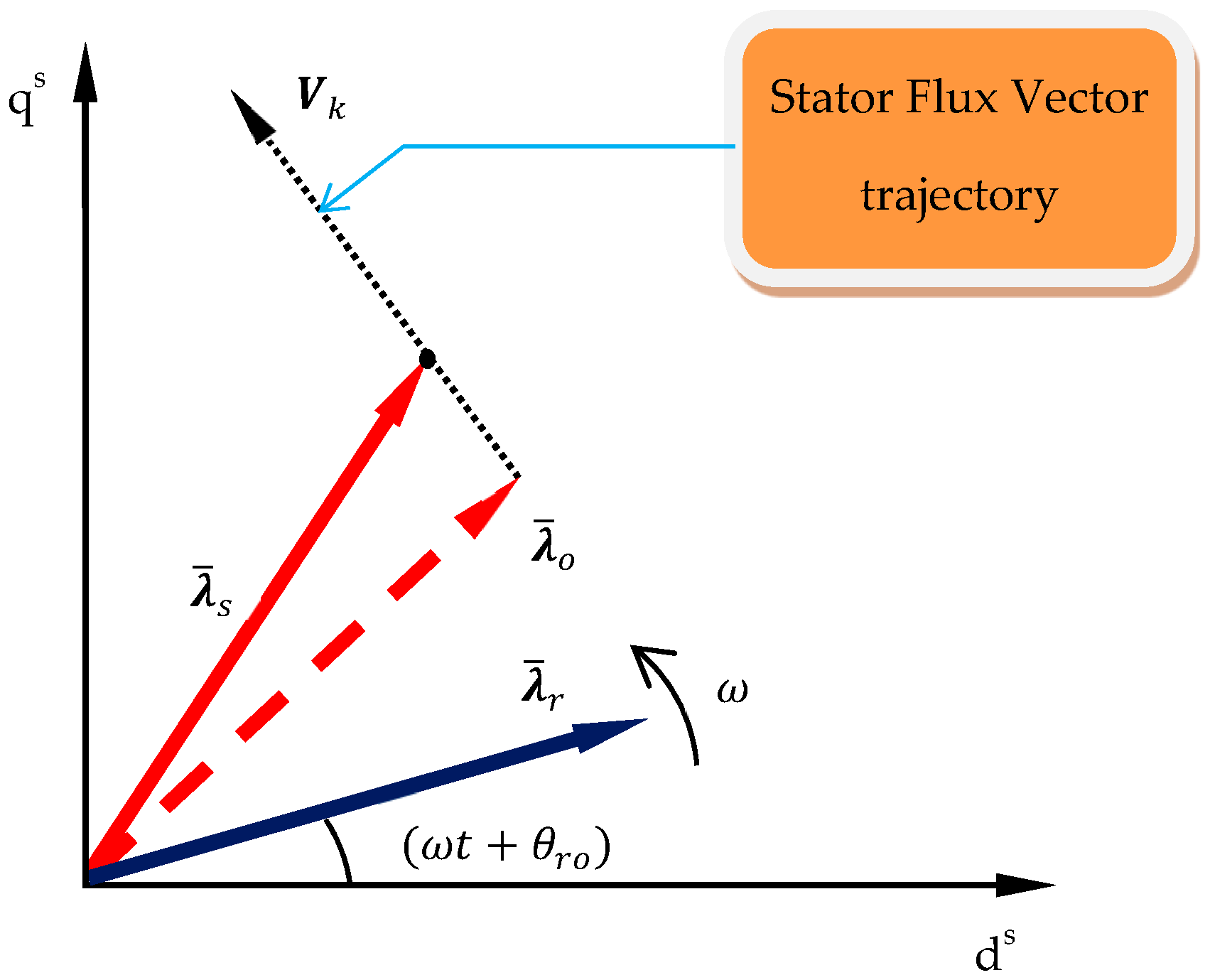
2.1. Torque Optimization Method (1)
2.2. Torque Optimization Method (2)
2.3. IM Parameter Uncertainty Effects on the Torque Optimization Method (1)
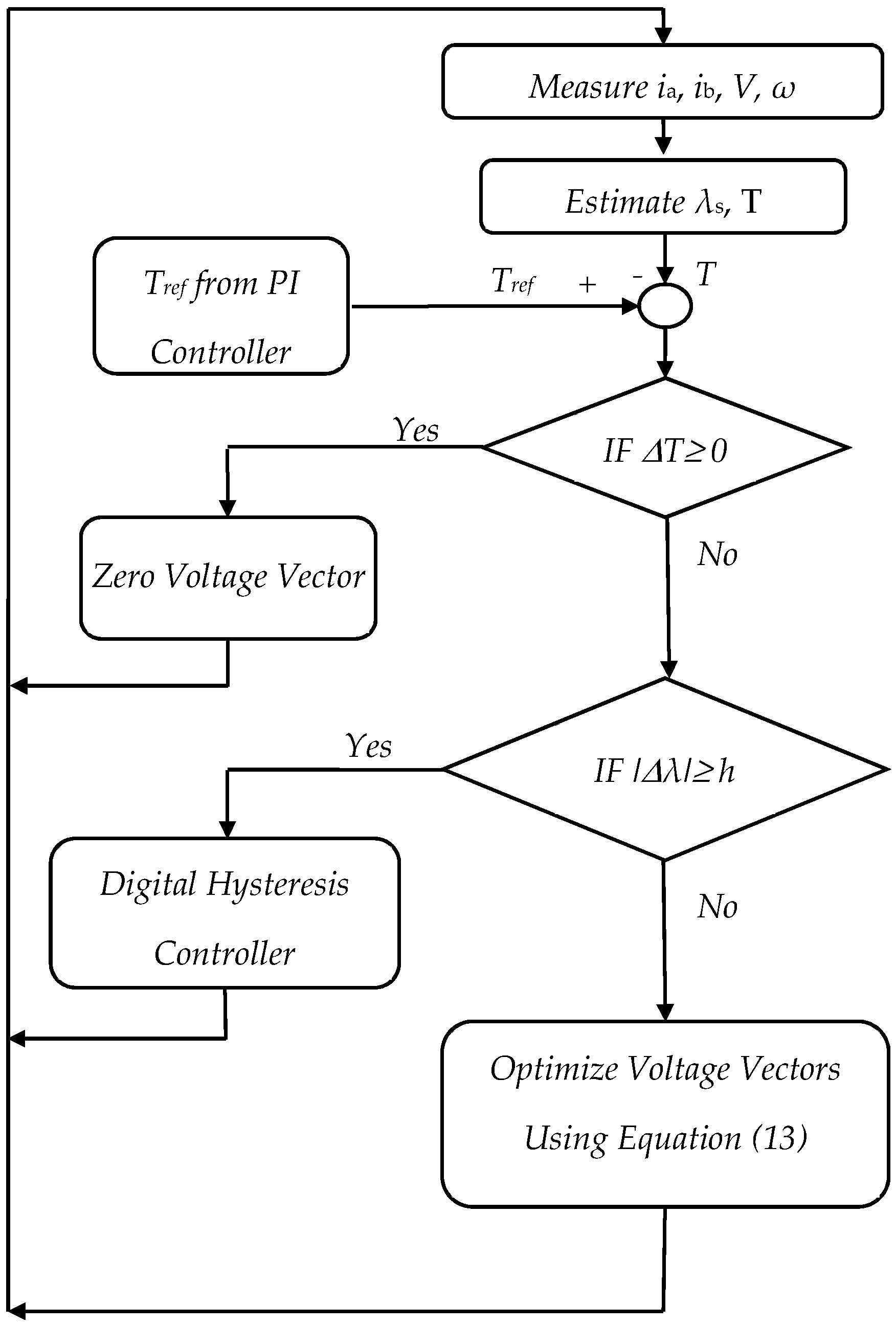
2.4. System Controller
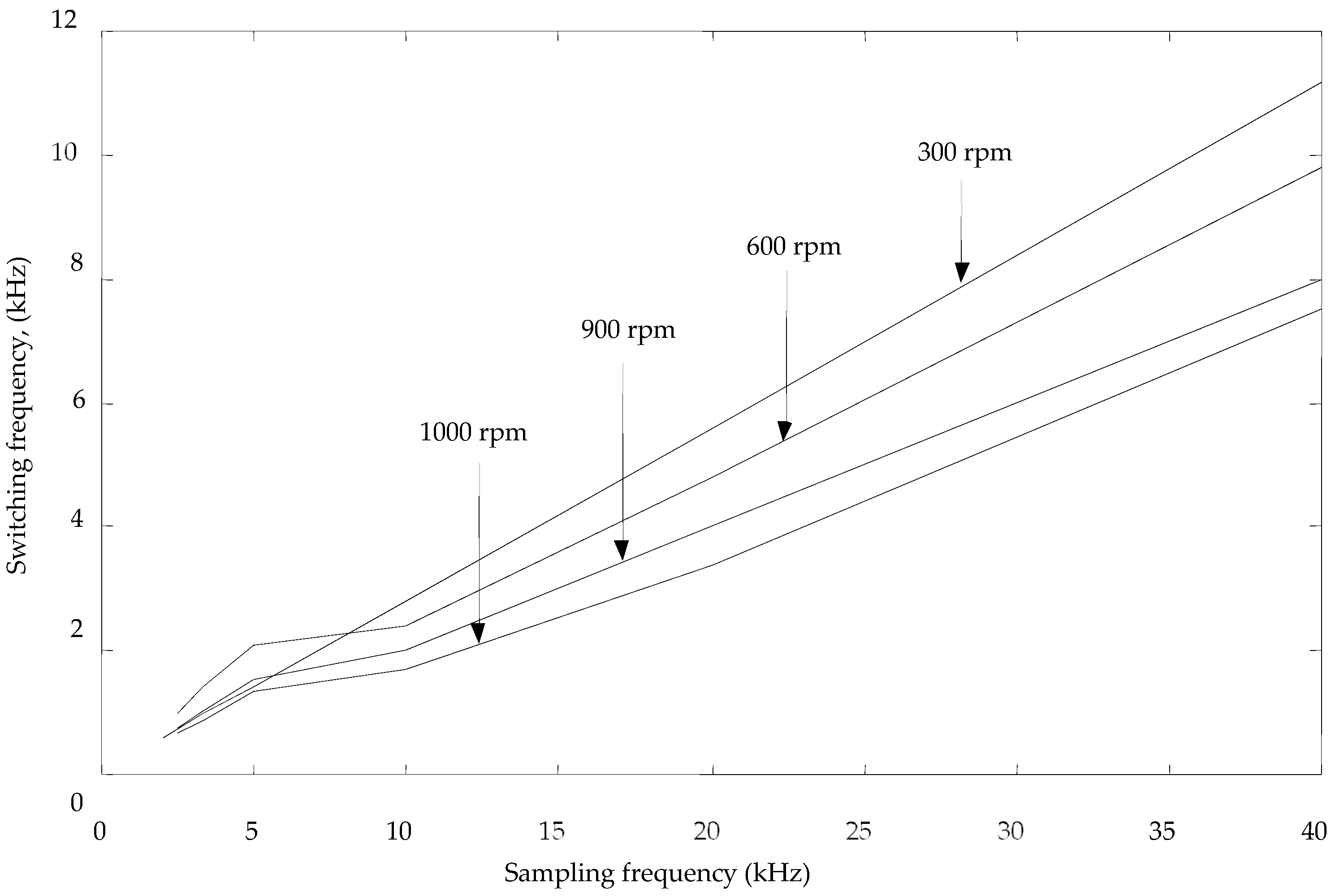
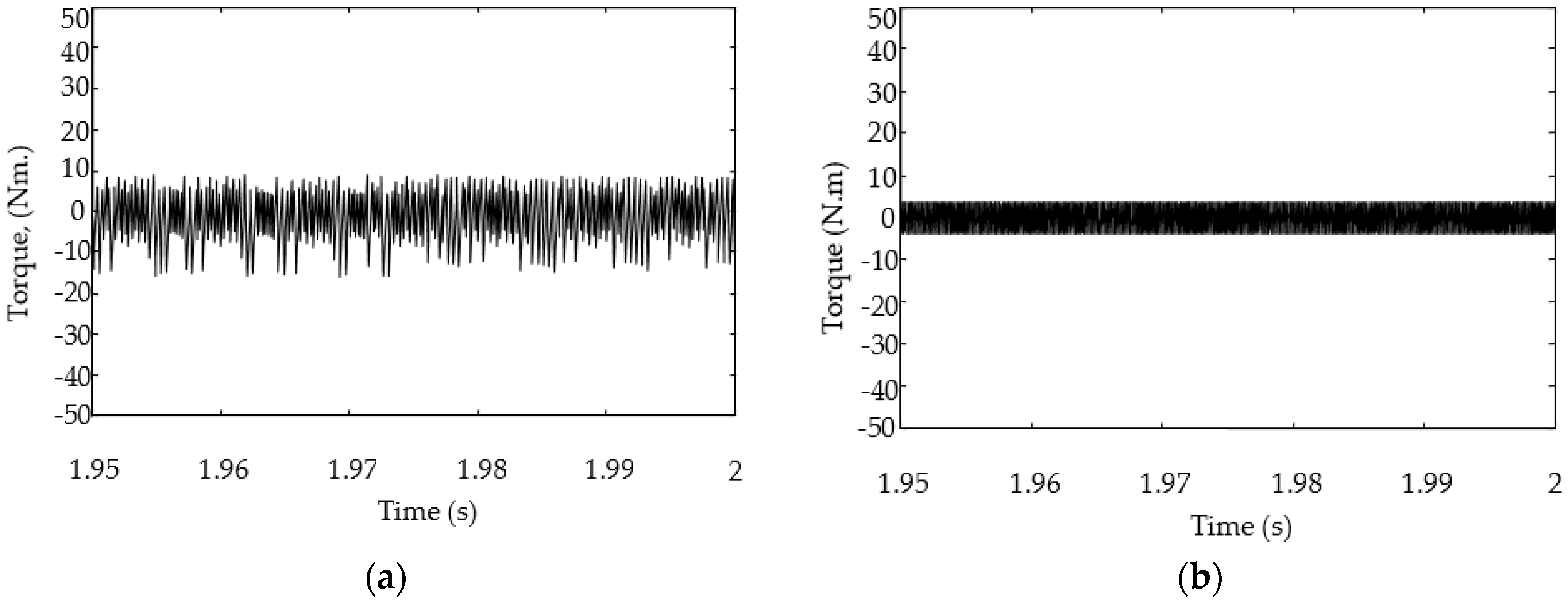
3. Simulation Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Vas, P. Sensorless Vector and Direct Torque Control; Oxford Univ. Press: New York, NY, USA, 1998. [Google Scholar]
- Kazmierkowski, M.P.; Franquelo, L.G.; Rodriguez, J.; Perez, M.A.; Leon, J.I. High-Performance Motor Drive. IEEE Ind. Electron. Mag. 2011, 27, 6–26. [Google Scholar] [CrossRef]
- Lascu, C.; Boldea, I.; Blaabjerg, F. A modified direct torque control for induction motor sensorless drive. IEEE Trans. Ind. Appl. 2000, 36, 122–130. [Google Scholar] [CrossRef]
- Buja, G.S.; Kazmierkowski, M.P. Direct torque control of PWM inverter—Fed AC motors. IEEE Trans. Ind. Electron. 2004, 51, 744–757. [Google Scholar] [CrossRef]
- Tiitinen, P.; Pohjalianen, P.; Lalu, J. The next generation motor control method DTC. Revue ABB 1995, 3, 19–24. [Google Scholar]
- Takahashi, I.; Noguchi, T. A New Quick Response and High-Efficiency Control Strategy of an Induction Motor. IEEE Trans. Ind. Appl. 1986, 22, 820–827. [Google Scholar] [CrossRef]
- Alsofyani, I.M.; Bak, Y.; Lee, K. Fast Torque Control and Minimized Sector-Flux Droop for Constant Frequency Torque Controller based-DTC of Induction Machines. IEEE Trans. Power Electron. 2019, 34, 12141–12153. [Google Scholar] [CrossRef]
- Zaid, S.A.; Mahgoub, O.A.; El-Metwally, K.A. Implementation of a New Fast Direct Torque Control Algorithm for Induction Motor Drives. IET Electr. Power Appl. 2010, 4, 305–313. [Google Scholar] [CrossRef]
- Patil, U.V.; Suryawanshi, H.M.; Renge, M.M. Closed-loop hybrid direct torque control for medium voltage induction motor drive for performance improvement. IET Power Electron. 2014, 7, 31–40. [Google Scholar] [CrossRef]
- Rosic, M.M.; Bebic, M.Z. Analysis of torque ripple reduction in induction motor DTC drive with multiple voltage vectors. Adv. Electr. Comput. Eng. 2015, 15, 105–114. [Google Scholar] [CrossRef]
- Carmeli, M.S.; Mauri, M. Direct Torque Control as a variable Structure control: Existence Conditions Verification and Analysis. Electr. Power Syst. Res. 2011, 81, 1188–1196. [Google Scholar] [CrossRef]
- Zhang, Z.; Tang, R.; Bai, B.; Xie, D. Novel Direct Torque Control Based on Space Vector Modulation with Adaptive Stator Flux Observer for Induction Motors. IEEE Trans. Magn. 2010, 46, 3133–3136. [Google Scholar] [CrossRef]
- Shyu, K.-K.; Lin, J.-K.; Pham, V.-T.; Yang, M.-J.; Wang, T.-W. Global Minimum Torque Ripple Design for Direct Torque Control of Induction Motor Drives. IEEE Trans. Ind. Electron. 2010, 57, 3148–3156. [Google Scholar] [CrossRef]
- Kumar, R.H.; Iqbal, A.; Lenin, N.C. Review of recent advancements of direct torque control in induction motor drives – a decade of progress. IET Power Electron. 2018, 11, 1–15. [Google Scholar] [CrossRef]
- Mohamed, E.; El-Shimy, S.A. Zaid 2 Fuzzy PID Controller for Fast Direct Torque Control of Induction Motor Drives. JES J. Electr. Syst. 2016, 12, 687–700. [Google Scholar]
- Lascu, C.; Jafarzadeh, S.; Fadali, M.S.; Blaabjerg, F. Direct Torque Control with Feedback Linearization for Induction Motor Drives. IEEE Trans. Power Electron. 2017, 32, 2072–2080. [Google Scholar] [CrossRef]
- Ammar, A.; Benakcha, A.; Bourek, A. Closed-loop torque SVM-DTC based on robust super twisting speed controller for induction motor drive with efficiency optimization. Int. J. Hydrogen Energy 2017, 42, 17940–17952. [Google Scholar] [CrossRef]
- Sudheer, H.; Kodad, S.F.; Sarvesh, B. Improvements in direct torque control of induction motor for a wide range of speed operation using fuzzy logic. J. Electr. Syst. Inf. Technol. 2017. accepted. [Google Scholar] [CrossRef]
- Casadei, D.; Serra, G.; Tani, A. Implementation of a direct torque control algorithm for induction motors based on discrete space vector modulation. IEEE Trans. Power Electron. 2000, 15, 769–777. [Google Scholar] [CrossRef]
- Jidin, A.; Idris, N.R.; Yatim, A.H.M.; Sutikno, T.; Elbuluk, M.E. Simple Dynamic Over modulation Strategy for Fast Torque Control in DTC of Induction Machines With Constant-Switching-Frequency Controller. IEEE Trans. Ind. Appl. 2012, 47, 2283–2291. [Google Scholar] [CrossRef]
- Wang, F.; Li, S.; Mei, X.; Xie, W.; Rodriguez, J.; Kennel, R.M. Model-based predictive direct control strategies for electrical drives: An experimental evaluation of PTC and PCC methods. IEEE Trans. Ind. Inform. 2015, 11, 671–681. [Google Scholar] [CrossRef]
- Ouhrouche, M.; Errouissi, R.; Trzynadlowski, A.M.; Tehrani, K.A. A novel predictive direct torque controller for induction motor drives. IEEE Trans. Ind. Electron. 2016, 63, 5221–5230. [Google Scholar] [CrossRef]
- Habibullah, M.; Lu, D.D.C.; Xiao, D.; Rahman, M.F. A simplified finite-state predictive direct torque control for induction motor drive. IEEE Trans. Ind. Electron. 2016, 63, 3964–3975. [Google Scholar] [CrossRef]
- Alsofyani, I.M.; Idris, N.R.N. Torque ripple reduction and fast torque control in DTC of induction machine using overlapping triangular-based constant frequency torque controller. In Proceedings of the 2016 IEEE International Conference on Power and Energy (PECon), Melaka, Malaysia, 28–29 November 2016; pp. 194–198. [Google Scholar] [CrossRef]
- Sung, G.-M.; Wang, W.-Y.; Lin, W.-S.; Yu, C.-P. Predictive Direct Torque Control Application-Specific Integrated Circuit of an Induction Motor Drive with a Fuzzy Controller. J. Low Power Electron. Appl. 2017, 7, 15. [Google Scholar] [CrossRef]
- Pimkumwong, N.; Wang, M.-S. Online Speed Estimation Using Artificial Neural Network for Speed Sensorless Direct Torque Control of Induction Motor Based on Constant V/F Control Technique. Energies 2018, 11, 2176. [Google Scholar] [CrossRef]
- Casadei, D.; Serra, G.; Tani, A.; Zarri, L. Direct Torque Control for Induction Machines: A technology status review. In Proceedings of the 2013 IEEE Workshop on Electrical Machines Design, Control, and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013; pp. 117–129. [Google Scholar] [CrossRef]
- Jun-Koo, K.; Dae-Woong, C.; Seung-Ki, S. Direct torque control of induction machine with variable amplitude control of flux and torque hysteresis bands. In Proceedings of the IEEE International Electric Machines and Drives Conference. IEMDC’99. Proceedings (Cat. No.99EX272), Seattle, WA, USA, 9–12 May 1999; pp. 640–642. [Google Scholar] [CrossRef]
- Alsofyani, I.M.; Idris, N.R.N.; Lee, K. Dynamic Hysteresis Torque Band for Improving the Performance of Lookup-Table-Based DTC of Induction Machines. IEEE Trans. Power Electron. 2018, 33, 7959–7970. [Google Scholar] [CrossRef]
- Berzoy, A.; Rengifo, J.; Mohammed, O. Fuzzy Predictive DTC of Induction Machines with Reduced Torque Ripple and High-Performance Operation. IEEE Power Electron. 2018, 33, 2580–2587. [Google Scholar] [CrossRef]
- Shukla, S.; Singh, B. Reduced-Sensor-Based PV Array-Fed Direct Torque Control Induction Motor Drive for Water Pumping. IEEE Trans. Power Electron. 2019, 34, 5400–5415. [Google Scholar] [CrossRef]
- Kazemian, H.B. Comparative study of a learning fuzzy PID controller and a self-tuning controller. ISA Trans. 2001, 40, 245–253. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IM Rating | IM Equivalent Circuit Parameters | |||
|---|---|---|---|---|
| 10 KW, 6 pole, 220V, 60 Hz | Rs = 0.294 Ω | Lm = 0.041 H | Ls = 0.0424 H | λs = 0.454 Wb |
| Rr = 0.156 Ω | Lr = 0.0417 H | J = 0.4 kgm2 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Albalawi, H.; Zaid, S.A.; Buswig, Y.M. Simulation Study of Two Torque Optimization Methods for Direct Torque-Controlled Induction Motors. Appl. Sci. 2019, 9, 5547. https://doi.org/10.3390/app9245547
Albalawi H, Zaid SA, Buswig YM. Simulation Study of Two Torque Optimization Methods for Direct Torque-Controlled Induction Motors. Applied Sciences. 2019; 9(24):5547. https://doi.org/10.3390/app9245547
Chicago/Turabian StyleAlbalawi, Hani, Sherif A. Zaid, and Yonis M. Buswig. 2019. "Simulation Study of Two Torque Optimization Methods for Direct Torque-Controlled Induction Motors" Applied Sciences 9, no. 24: 5547. https://doi.org/10.3390/app9245547
APA StyleAlbalawi, H., Zaid, S. A., & Buswig, Y. M. (2019). Simulation Study of Two Torque Optimization Methods for Direct Torque-Controlled Induction Motors. Applied Sciences, 9(24), 5547. https://doi.org/10.3390/app9245547