Autonomous Driving—A Crash Explained in Detail

 ,
,  , , and
, , and 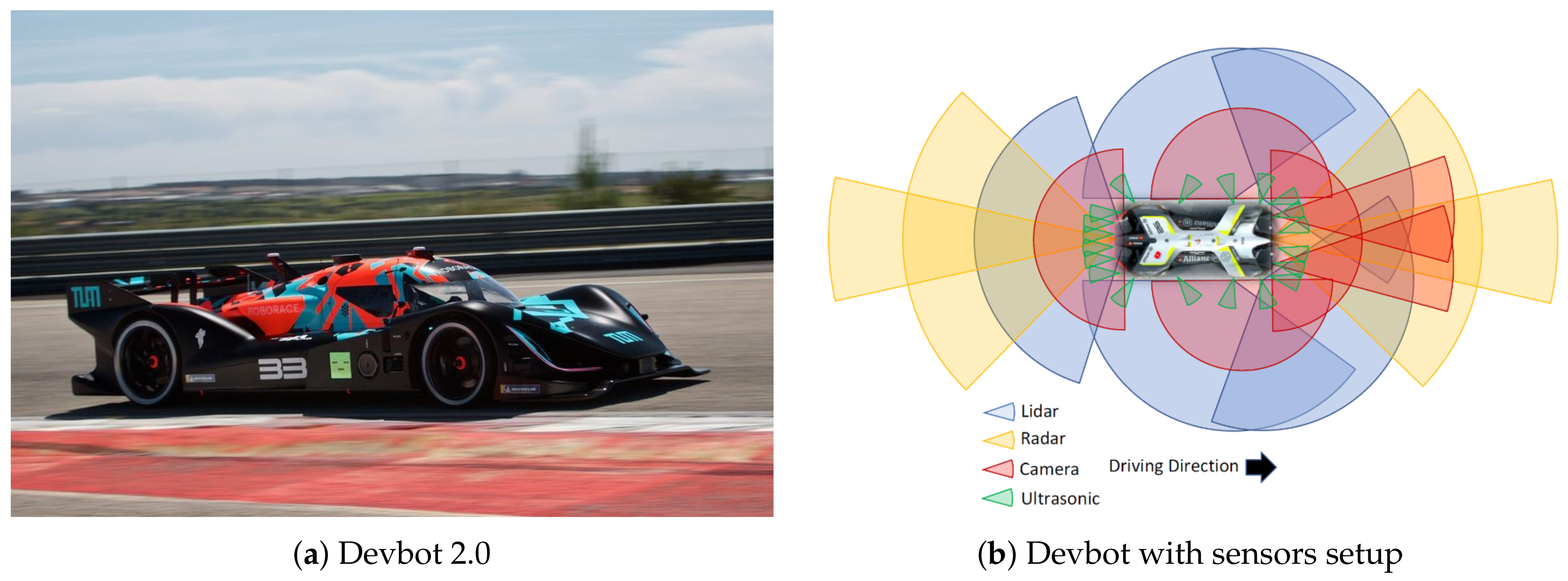{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Presentation of a general method for describing autonomous disengagements or crashes;
- detailed evaluation of the crash causes by using the new presented method;
- detailed description of the crash of an autonomous racecar while it was driven by the software;
- derivation of important safety features for autonomous driving;
- derivation of new software functions to prevent such a crash.
2. Related Work
3. Research Design—A General Method for Describing Autonomous Disengagements
- Background knowledge—autonomous vehicle presentation: first of all, an overview of the autonomous vehicle must be given. It needs to be displayed what kind of vehicle was used (vehicle purpose e.g., passenger vehicle) and what are most important vehicle parameters (e.g., vehicle mass). In addition, it needs to be presented what kind of sensors and electrical control units (ECUs) are integrated in the vehicle. Therefore for others the comparison to their own vehicle can be assured.
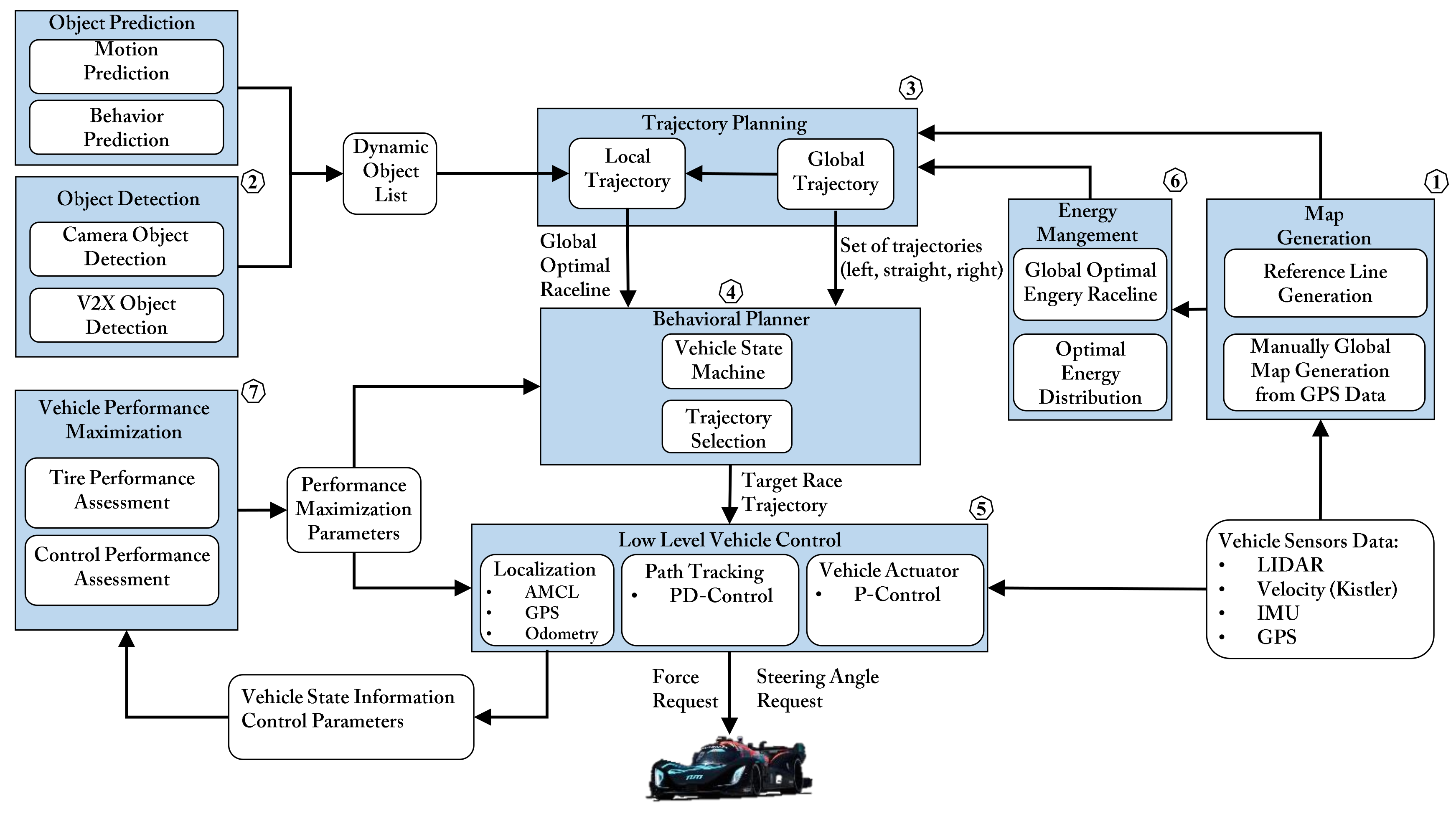
- Background knowledge—autonomous software stack explanation: The central element of an autonomous vehicle is its software. To understand a misbehavior of an autonomous vehicle it needs to be explained of what parts an autonomous software consists of. In addition it needs to be explained how these parts communicate with each other and what kind of interfaces are used.
- A step-by-step display of the crash chronology: in the next step it needs to be explained what happened in the crash. First of all an overview of the situation (e.g., describing the scenario, describing the area) needs to be given. After that, a detailed step-by-step explanation of what happened is essential for further understanding. From the knowledge of a detailed step-by-step vehicle behavior further explanations can be derived and theories from observation can be generated.
- Software explanation failure in detail: if the autonomous driving disengagement can be lead back to an software issue it needs be the explained in detail what went wrong in this software. Each software part that failed and has contributed its part to the crash needs to be explained here. Beside this, it needs to be displayed why the integrated safety systems did not work. In this section we use real vehicle measurement data (accelerations, velocities, and vehicle states) to give a quantitative view on the software failure.
- Discussion of the software failure: after a detailed insight into the software failures are given, an additional discussion about the software failures must be done to derive conclusions for autonomous driving software development. It needs to discussed here what precautions to prevent this specific problem can be integrated, what kind of enhanced error detection mechanisms needs to be implemented in the software, and how previous real and simulation tests can be done to detect those errors earlier.
- Outlook for further software enhancements: in the last part an outlook for further software developments for the explained software stack needs to be given. It should be displayed what kind of future algorithms and software parts will be used to enhance the software so this kind of failure will not happen anymore.
4. Background Knowledge
4.1. The Autonomous Vehicle—Roborace Devbot 2.0
4.2. The Autonomous Software Stack from TUM
5. A Step by Step Display of the Crash Chronology
5.1. The Crash in Modena—An Overview
5.2. The Crash in Modena—Qualifying Parameters
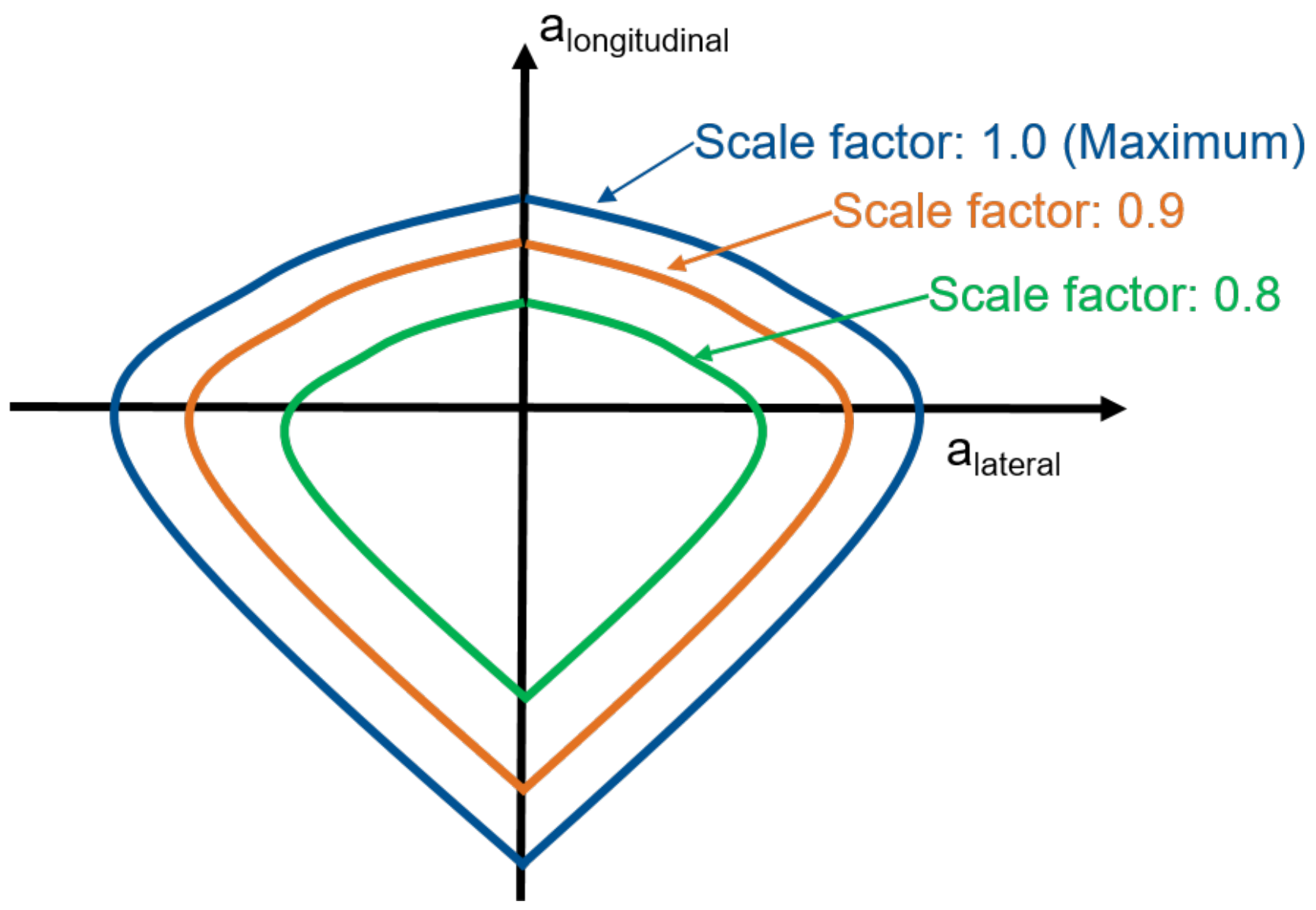
- Lap one: Heating up the brakes and tires—gg-scale-factor = 0.8.
- Lap two: Increase speed and check vehicle stability—gg-scale-factor = 0.9.
- Lap three: Timed flying lap—gg-scale-factor = 0.925.
- Lap four: Cool down lap for brakes and tires—gg-scale-factor = 0.8.
5.3. The Crash in Modena—Step by Step Chronology of the Crash
- The car started the autonomous run with a scale factor of 0.8 on the start finish line of the track. No safety driver was inside the car. The track was dry with a surface temperature of 36 degrees Celsius. Tires were in good condition and had only completed 31 km. The live data stream displayed minor under- and over-steering in a few corners, which was not critical because of the cold tires. Lap one was completed successfully.
- The car started lap two with a new gg-profile scaled to factor 0.9. On the start-finish-straight the car reached a maximum velocity of 195 km/h before starting to brake into corner one. Lap two was completed successfully.
- The car started lap three with a new gg-profile scaled to factor 0.925. This scale factor was used for the first time this day which is why we left a gap to the maximum of the vehicle handling limits. On the start-finish-straight the vehicle reached a maximum velocity of 198 km/h before starting to brake into corner one. Lap three was completed successfully.
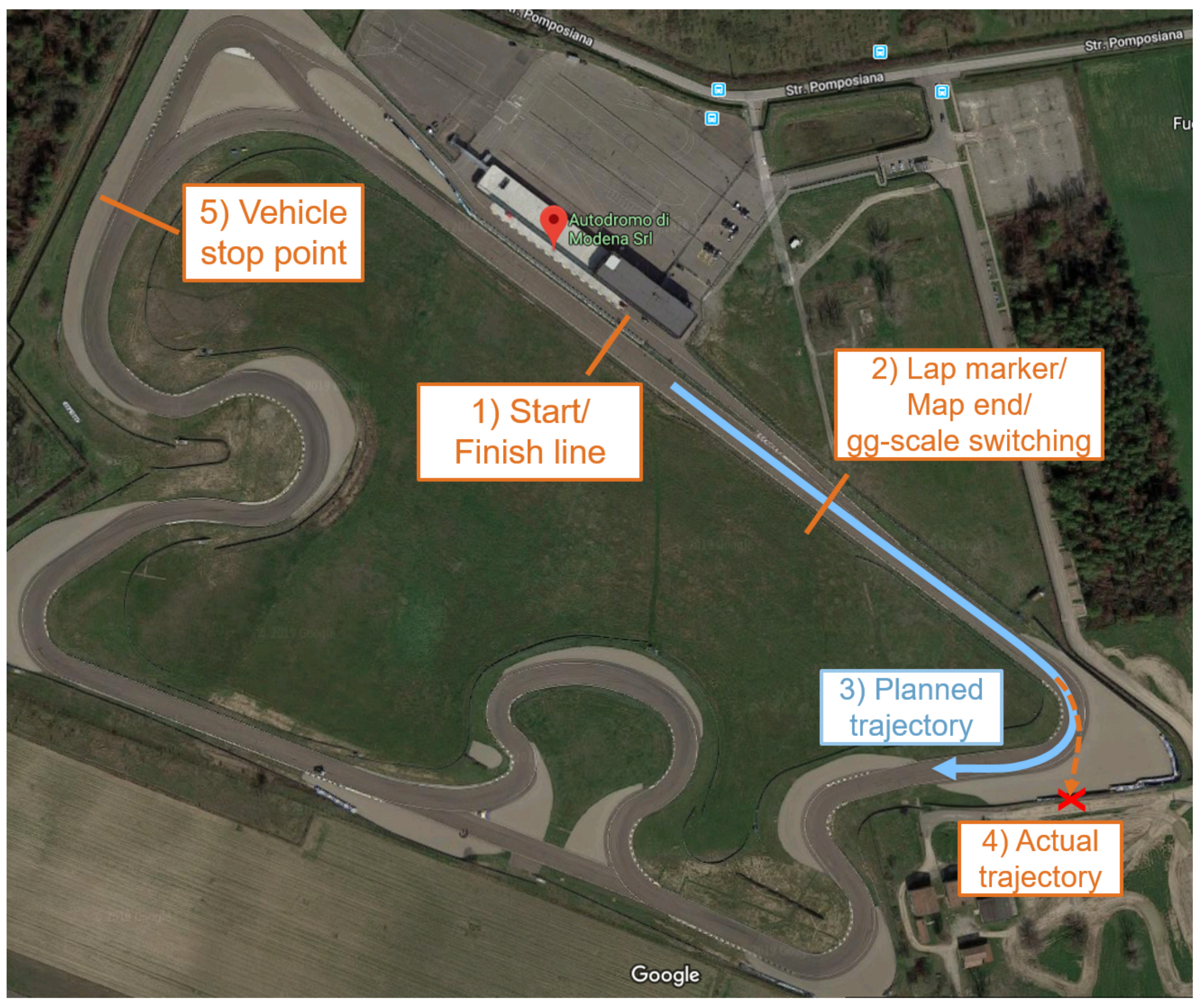
- The car started the last lap with a new gg-profile scaled to factor 0.8 for the cool down of the vehicle. By entering corner one, the vehicle understeered. Around the apex of corner one, it went off the intended trajectory into the gravel without any request for slowing down (Figure 7). Soon after that, it hit a barrier in corner one.
- The car ground to a halt because of major mechanical damages. The high-voltage (HV) light was green which indicated that the car was safe from an HV perspective. No one was injured and the car was recovered completely after the crash.
6. Software Explanation Failure in Detail
6.1. Velocity Planner Failure
- After lap three (timed lap), the scale factor was switched from 0.925 to 0.8 (cool down). This switching happened after passing the last point of the official map created in sub-module one because this was assumed to be the start/finish line of the track. However, for Modena the final point of the map was at the end of the pitlane (map end in Figure 5) and therefore roughly 170 m after the real start/finish line which was the intended scale factor switching point. The car always stopped on a specific vehicle stop point before the pit entry and not after the start/finish line which is why we did not discover this important fact.
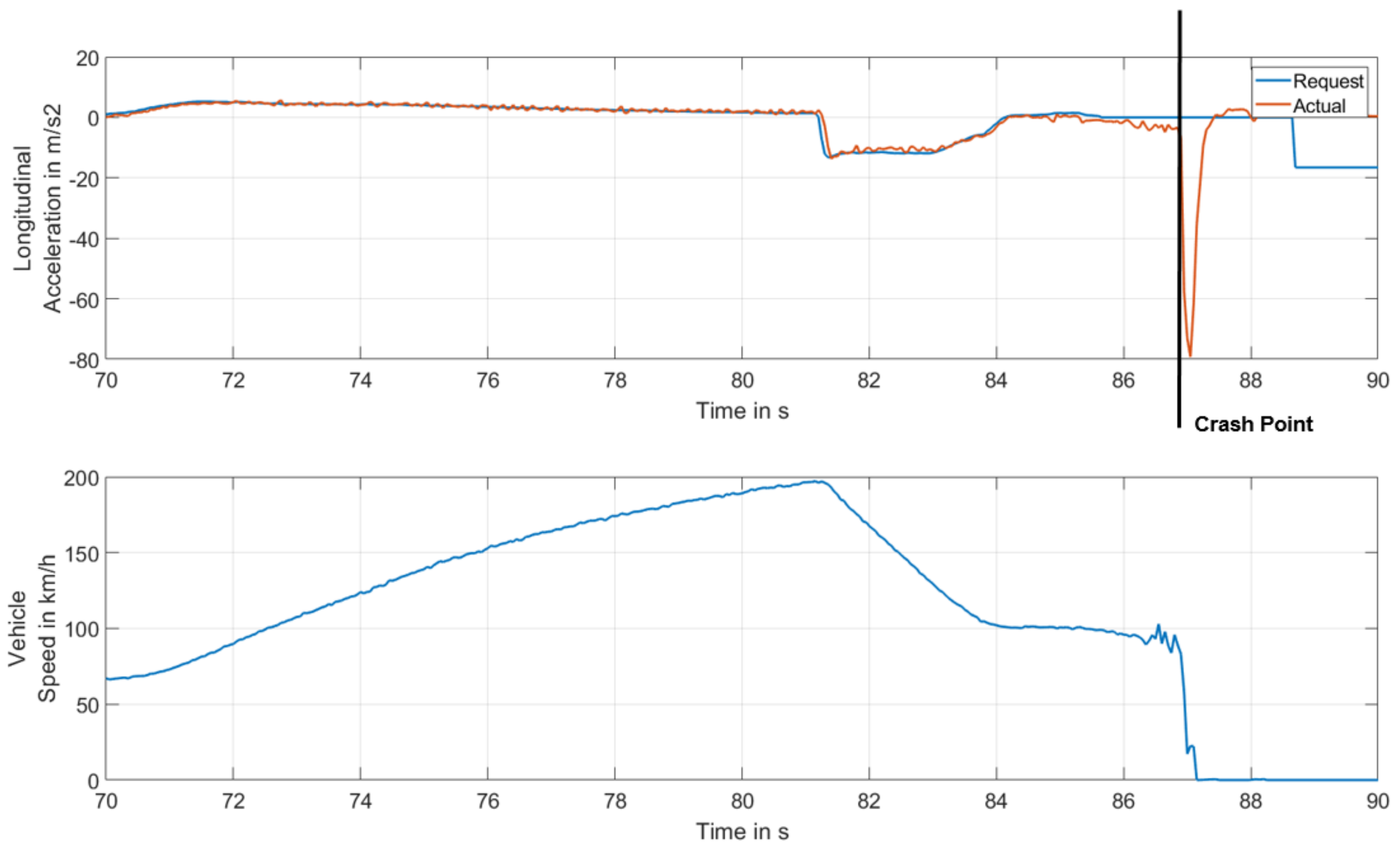
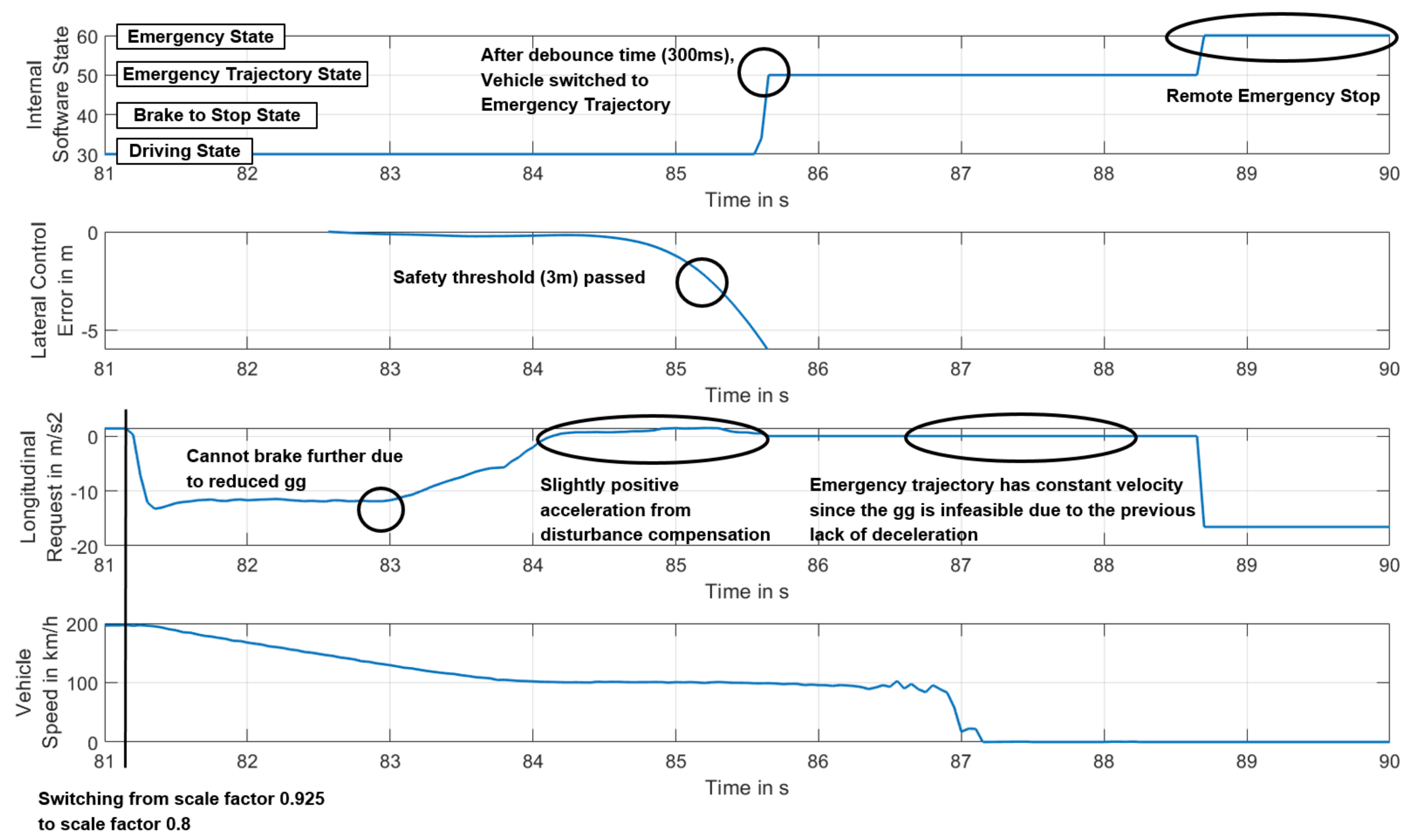
- From this moment on, the 0.8-scaled “smaller” gg-diagram was used for the calculation of the velocity profile in the trajectory planner. Similar to the lap before, the software now requested a negative longitudinal deceleration (Figure 7).
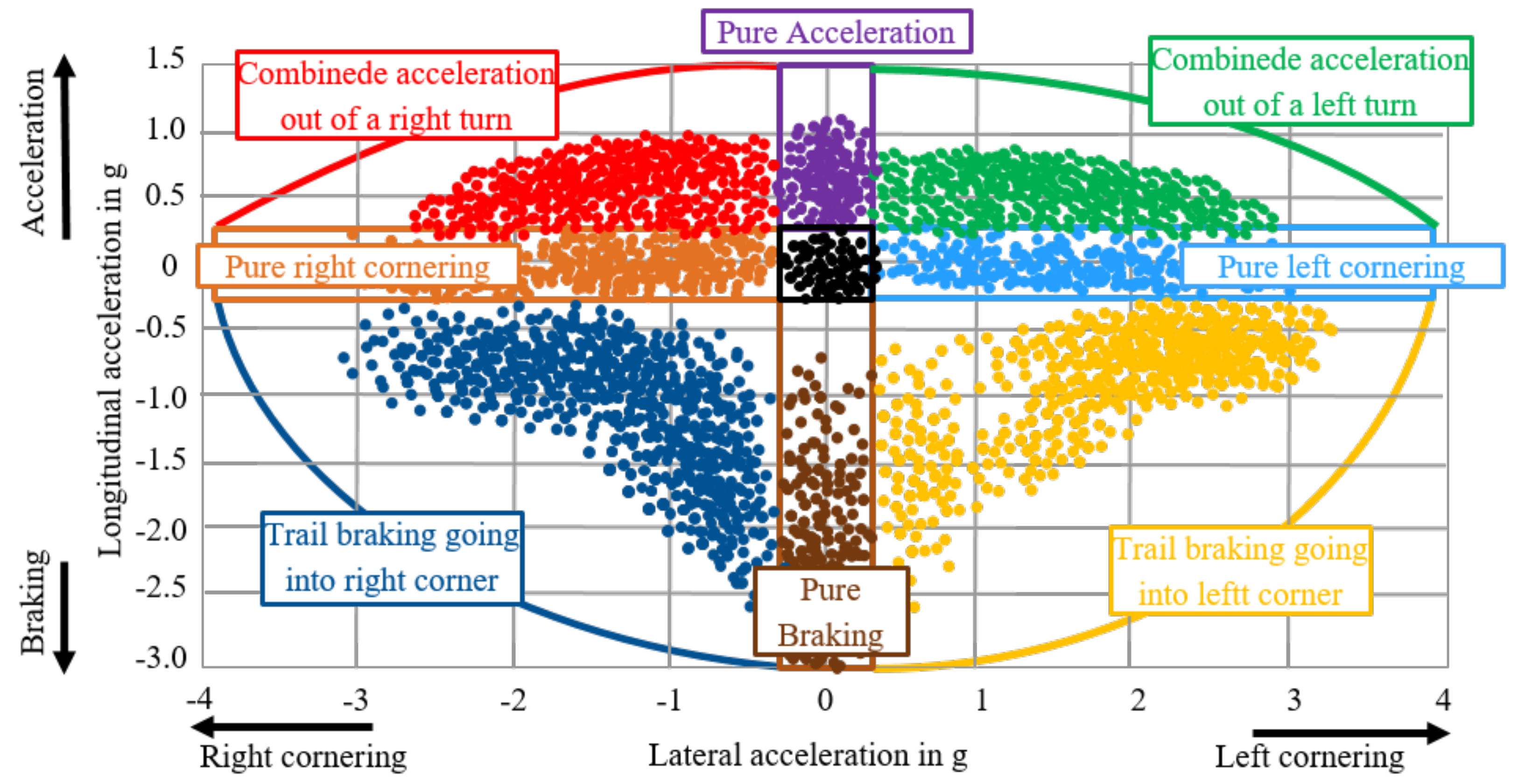
- As soon as the car started to turn into the corner the tires must not only transmit longitudinal but also lateral forces. This means that according to Equation (1) the possible deceleration must be reduced more and more while following the given path. Finally, no more deceleration is applied as soon as the pure lateral acceleration of the gg-diagram is fully used. Coming from a vehicle-dynamics perspective this behavior is reasonable. However, it strongly depends on the gg-diagram. In the current case there was remaining tire potential in reality which was not used because the software thought that it had already exploited all of it. The software stopped asking for further deceleration when the vehicle reached a speed of around 100 km/h, while in the previous lap it had slowed down to 65 km/h (Figure 7).
- Usually it’s not a problem if the car drives into the corner slightly too fast because the gg-diagram and/or the scaling factor leaves a small safety margin to the real vehicle handling limits. However, in this case the car was so fast that the real handling limits were exceeded. As soon as the tires could not transmit the required lateral force the vehicle under-steered off the intended trajectory. This led to a path into the gravel without any more request for slowing down.
- In the analysis we found out that the scaling factor switching point was only a few meters too late to be able to brake down enough in front of corner one in combination with a slightly higher maximum velocity which was reached in lap three due to the scaling factor of 0.925.
6.2. Safety System Failure
- The emergency gg-diagram was also scaled with the scaling factor.
- The controller switched too late to the emergency trajectory.
- Behavior planner communication timeout .
- Non-critical sensor fusion failure (fusing IMU, wheel-speed and velocity sensor information).
- Vehicle sliding based on a chassis side slip threshold.
- Maximum lateral control error of 3 m for longer than 300 ms.
- Communication loss to the low-level ECU.
- Driving on the emergency trajectory without coming to a standstill for more than 5 s.
7. Discussion
7.1. Evaluation of the New Presented Method for Autonomous Disengagements
7.2. Software Disengagement Reports
7.3. Precautions to Prevent this Specific Problem
- Prevent down scaling of the gg-diagram if this leads to an infeasible velocity profile.
- Use the unscaled gg-diagram for the emergency trajectory to be able to fully utilize the vehicle handling limits.
- Tighten the condition for switching to the emergency trajectory to m lateral error
- Use the real start finish line instead of the end of the reference line as switching point for the scaling factor.
- Evaluate different velocity planner concepts that are allow the integration of boundary conditions and implement them (future work).
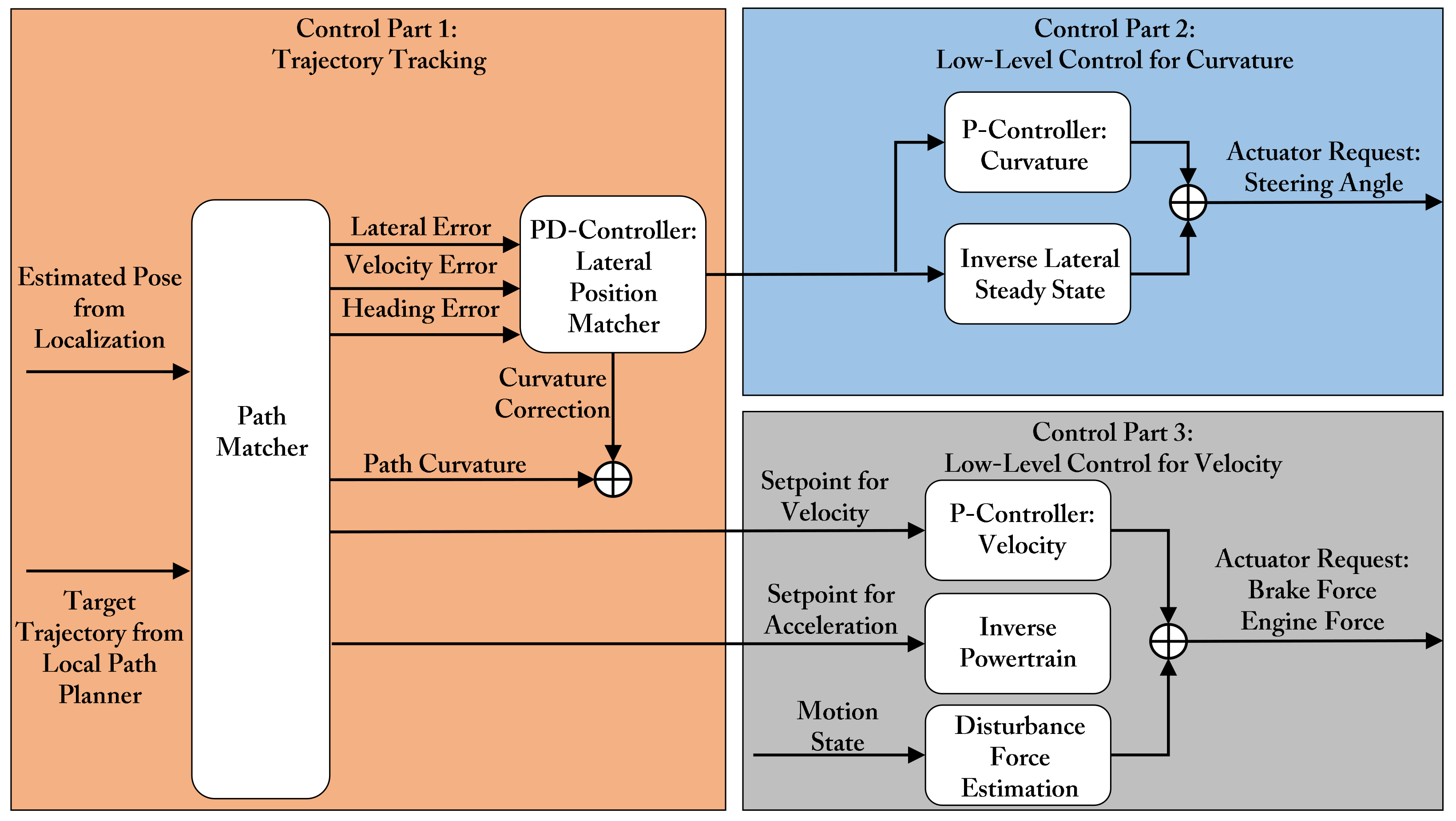
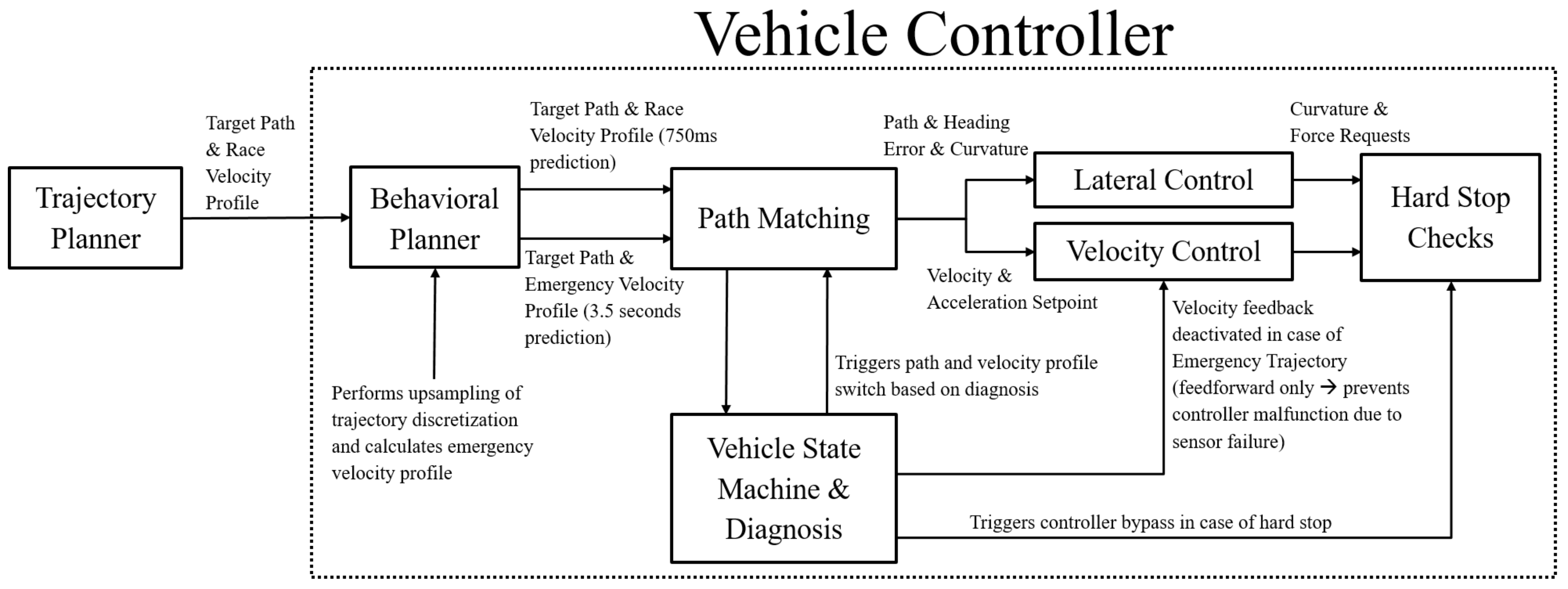
- The controller checks both received trajectories if they are feasible. This is done by calculating the total acceleration of the car on the basis of the requested longitudinal acceleration, an unscaled gg-diagram and the curvature profile. Furthermore, the emergency trajectory must always end at standstill. If one or both conditions is not met, it immediately switches to the last valid emergency trajectory. The main idea behind this step is, that it is easier to verify a result instead of producing a correct result and a redundancy for ensuring the constraints is introduced.
7.4. Enhanced Error Detection Mechanisms
- Interval test of input and output data
- Plausibility checks through models or comparison of different data sources
- Detection of data errors by error detection algorithms and multiple data storage
- Selected deactivation of faulty functions
- External monitoring devices, e.g., watchdog
- Independent redundancies with different software structures
- Safety layer for the trajectory planner: We propose the integration of a safety layer for the trajectory planner. The idea is to have a second planner that runs as a redundancy for the actual trajectory planner. To get reliable results this second planner should be developed independently and on another basis than the main planner. This safety layer can then be used for the inspection of the feasibility of the generated velocity profiles. In addition, it should secure that the emergency trajectory always ends at 0 km/h. Additional conditions can be integrated. If any of the conditions is not matched, the safety layer switches immediately to the last valid emergency trajectory. To make the approach even more robust the safety layer and the main planner could run on different hardware. The Devbot has a Nvidia Drive PX2 as main ECU. This ECU offers two seperate GPU/CPU combinations that can run software individually [27]. In addition, an AURIX microcontroller is integrated as decisive safety compute element.
- Supvervisor submodule: We propose the development of an additional runtime verification module, called “supervisor”. The scope of this sub-module is to safeguard autonomous driving functions. Thereby, the goal is to identify and monitor an exhaustive list of features contributing to a safe operation, i.e., trajectory. Each of these features is then tracked by an evaluation metric. Based on the full list of metrics, a classification function decides on the binary safety state of a corresponding trajectory (“safe” or “unsafe”). Since an extensive list of features is surveyed this way, the supervisor module ensures the trajectory planner to stay within safe bounds. As a side product, approval of a complex trajectory planner can be eased up. The development of such a supervisor is part of future research in our team.
7.5. Enhanced Simulation
- In the future we will focus more on Software in the Loop (SiL) development than on model in the loop (MIL) development. This is mainly because autonomous driving functions are connected to different subfunctions and have influences on other functions like described in this paper and displayed in our software architecture.
- Reuse of tests in all development phases: We need the same tests and same scenarios for all development stages.
- Automated scenarios testing: The automated simulation of different traffic scenarios on a variety of road networks with different environmental conditions is the most important part in the future autonomous driving software development. Therefore, the intelligent selection of test scenarios like displayed in [39,40] is of decisive importance. A large number of tests to cover variations of scenarios and random tests must be developed. In addition, we need a consistent management of test parameters and result analysis.
- Faster development processes: we need to design a continuous integration (CI) system for the environment development and the build and integration processes used in the software development. This is necessary in order to build, test, and integrate software modules in large scale environments in a short time.
- Data analysis tools for algorithm analysis: as described in the paper, the necessary tools for evaluating software issues fast and detailed are not available yet. We need tools that can explain software issues with unambiguous metrics without surveying gigabyte of data first. In addition we need special tools for machine learning algorithm decisions (traceability)
8. Outlook
- Tire performance assessment: the main goal of the tire performance assessment is to obtain information about the friction potential of the vehicle’s tire-road contact, to store these data in backend maps and to provide it where required [10]. With this knowledge, the dynamic-trajectory-planning algorithms can calculate an adjusted path and velocity profile taking the vehicle’s local maximum lateral and longitudinal acceleration into account [10]. By using vehicle-internal state variables (accelerations, forces, and torques) and an extended Kalman filter for estimating (partially) unobserved state variables, the current tire-road friction potential can be estimated. Furthermore, the algorithm collects data over a certain period of time to calculate a mean value of the friction potential for fixed road segments. A detailed explanation of this proposed software can be found in [10,41].
- Control performance assessment: in our current software architecture we plan under ideal and simplified conditions. Obviously, this leads to a mismatch between planning and realization of the planned trajectory. To mitigate this uncertainty, it is required to include safety margins in terms of maximum accelerations as well as safety distance to the track boundaries [10]. However, it is unclear a priori how to set them as they depend on the controller performance and the environment conditions [10]. To overcome this problem, a data-driven algorithm is proposed which scales the allowed maximum accelerations while at the same time monitoring several safety constraints [10]. As safety constraints we chose the peak lateral tracking error, the longitudinal wheelslip and the difference between front and rear sideslip angle [10]. By using a Gaussian process regression, we learn those constraints using real data and can improve the estimates while driving. A detailed explanation of this proposed software can be found in [42].
9. Materials
10. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ABS | Anti-lock Braking System |
| ADAS | Advanced Driver Assistance System |
| AMCL | Adpative Monte Carlo Localization |
| ASIL | Automotive Safety Integrity Level |
| CI | Continuous Integration |
| CPU | Central Processing Unit |
| ECU | Electrical Control Unit |
| ESP | Electronic Stability Program |
| GPU | Graphical Processing Unit |
| HiL | Hardware in the Loop |
| HV | High Voltage |
| IMU | Inertial Measurement Unit |
| LMP | Le Mans Prototype |
| ROS | Robot Operating System |
| TUM | Technical University of Munich |
| WHO | World Health Organization |
References
- World Health Organization. Road Traffic Injuries 2018; World Health Organization: Geneva, Switzerland, 2019; Available online: https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries (accessed on 23 August 2019).
- Statistisches Bundesamt. Verkehrsunfälle und Verunglückte im Zeitvergleich (ab 1950). 2019. Available online: https://www.destatis.de/DE/Themen/Gesellschaft-Umwelt/Verkehrsunfaelle/Tabellen/liste-strassenverkehrsunfaelle.html (accessed on 2 September 2019).
- Johanning, V. Car IT kompakt Das Auto der Zukunft—Vernetzt und Autonom Fahren; Springer Vieweg: Wiesbaden, Germany, 2015. [Google Scholar]
- Minx, E. Autonomes Fahren: Wo Wir Heute Stehen und Was Noch Zu Tun Ist; Axel Springer SE, Corporate Solutions: Berlin, Germany, 2015. [Google Scholar]
- Winner, H. Introducing autonomous driving: An overview of safety challenges and market introduction strategies. Automatisierungstechnik 2018, 66, 100–106. [Google Scholar] [CrossRef]
- SAE International. Auotmated Driving—Levels of Driving Automation. Available online: https://www.sae.org/misc/pdfs/automated_driving.pdf (accessed on 26 September 1988).
- Wikipedia. Bundesstelle für Flugunfalluntersuchung. 2019. Available online: https://de.wikipedia.org/wiki/Bundesstelle_für_Flugunfalluntersuchung (accessed on 18 September 2019).
- Roborace Ltd. Roborace. 2019. Available online: https://roborace.com/ (accessed on 23 August 2019).
- Betz, J.; Wischnewski, A.; Heilmeier, A.; Nobis, F.; Stahl, T.; Hermansdorfer, L.; Lienkamp, M. A Software Architecture for an Autonomous Racecar. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019. [Google Scholar] [CrossRef]
- Betz, J.; Wischnewski, A.; Heilmeier, A.; Nobis, F.; Stahl, T.; Hermansdorfer, L.; Lienkamp, M. A Software Architecture for the Dynamic Path Planning of an Autonomous Racecar at the Limits of Handling. In Proceedings of the 8th IEEE International Conference on Connected Vehicles and Expo (ICCVE 2019), Graz, Austria, 4–8 November 2019. [Google Scholar]
- Pendleton, S.; Andersen, H.; Du, X.; Shen, X.; Meghjani, M.; Eng, Y.; Rus, D.; Ang, M. Perception, Planning, Control, and Coordination for Autonomous Vehicles. Machines 2017, 5, 6. [Google Scholar] [CrossRef]
- Kato, S.; Takeuchi, E.; Ishiguro, Y.; Ninomiya, Y.; Takeda, K.; Hamada, T. An Open Approach to Autonomous Vehicles. IEEE Micro 2015, 35, 60–68. [Google Scholar] [CrossRef]
- Kato, S.; Tokunaga, S.; Maruyama, Y.; Maeda, S.; Hirabayashi, M.; Kitsukawa, Y.; Monrroy, A.; Ando, T.; Fujii, Y.; Azumi, T. Autoware on Board: Enabling Autonomous Vehicles with Embedded Systems. In Proceedings of the 2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS), Porto, Portugal, 11–13 April 2018. [Google Scholar] [CrossRef]
- Apollo. Apollo Open Platform. 2019. Available online: http://apollo.auto/ (accessed on 23 August 2019).
- State of California—Department of Motor Vehicles. Report of Traffic Collision Involving an Autonomous Vehicle (OL 316). 2019. Available online: https://www.dmv.ca.gov/portal/dmv/detail/vr/autonomous/autonomousveh_ol316 (accessed on 23 August 2019).
- Favarò, F.M.; Nader, N.; Eurich, S.O.; Tripp, M.; Varadaraju, N. Examining accident reports involving autonomous vehicles in California. PLoS ONE 2017, 12, e0184952. [Google Scholar] [CrossRef] [PubMed]
- Favarò, F.; Eurich, S.; Nader, N. Autonomous vehicles’ disengagements: Trends, triggers, and regulatory limitations. Accid. Anal. Prev. 2018, 110, 136–148. [Google Scholar] [CrossRef] [PubMed]
- State of California - Department of Motor Vehicles. Autonomous Vehicle Disengagement Reports 2018. 2019. Available online: https://www.dmv.ca.gov/portal/dmv/detail/vr/autonomous/disengagement_report_2018 (accessed on 23 August 2019).
- Favaro, F.M.; Eurich, S.O.; Nader, N. Analysis of Disengagements in Autonomous Vehicle Technology. In Proceedings of the 2018 Annual Reliability and Maintainability Symposium (RAMS), Reno, NV, USA, 22–25 January 2018. [Google Scholar] [CrossRef]
- Tesla. Tesla Autopilot. 2019. Available online: https://www.tesla.com/de_DE/autopilot (accessed on 23 August 2019).
- Electrek. Understanding the Fatal Tesla Accident on Autopilot and the NHTSA Probe. 2019. Available online: https://electrek.co/2016/07/01/understanding-fatal-tesla-accident-autopilot-nhtsa-probe/ (accessed on 23 August 2019).
- The Economist. Why Uber’s Self-Driving Car Killed a Pedestrian. 2019. Available online: https://www.economist.com/the-economist-explains/2018/05/29/why-ubers-self-driving-car-killed-a-pedestrian (accessed on 23 August 2019).
- Wikipedia. Death of Elaine Herzberg. 2019. Available online: https://en.wikipedia.org/wiki/Death_of_Elaine_Herzberg (accessed on 23 August 2019).
- Fletcher, L.; Teller, S.; Olson, E.; Moore, D.; Kuwata, Y.; How, J.; Leonard, J.; Miller, I.; Campbell, M.; Huttenlocher, D.; et al. The MIT-Cornell collision and why it happened. J. Field Robot. 2008, 25, 775–807. [Google Scholar] [CrossRef]
- Technical University of Munich - Chair of Automotive Technology. Research Project Roborace: Autonomous Motorsport. 2018. Available online: https://www.ftm.mw.tum.de/en/main-research/vehicle-dynamics-and-control-systems/roborace-autonomous-motorsport/ (accessed on 25 May 2019).
- Betz, J.; Wischnewski, A.; Heilmeier, A.; Nobis, F.; Stahl, T.; Hermansdorfer, L.; Lienkamp, M. What can we learn from autonomous level-5 motorsport? In 9th International Munich Chassis Symposium 2018; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2018. [Google Scholar] [CrossRef]
- Nvidia. Nvidia Drive Platform. 2019. Available online: https://www.nvidia.com/en-us/self-driving-cars/drive-platform/ (accessed on 9 September 2019).
- Speedgoat. Mobile Real-Time Target Machine. 2019. Available online: https://www.speedgoat.com/products-services/real-time-target-machines/mobile (accessed on 4 January 2019).
- Nobis, F.; Betz, J.; Hermansdorfer, L.; Lienkamp, M. Autonomous Racing: A Comparison of SLAM Algorithms for Large Scale Outdoor Environments. In Proceedings of the 2019 3rd International Conference on Virtual and Augmented Reality Simulations (ICVARS 19), Perth, Australia, 23–25 February 2019. [Google Scholar] [CrossRef]
- Palafox, P.R.; Betz, J.; Nobis, F.; Riedl, K.; Lienkamp, M. SemanticDepth: Fusing Semantic Segmentation and Monocular Depth Estimation for Enabling Autonomous Driving in Roads without Lane Lines. Sensors 2019, 19, 3224. [Google Scholar] [CrossRef] [PubMed]
- Heilmeier, A.; Wischnewski, A.; Hermansdorfer, L.; Betz, J.; Lienkamp, M.; Lohmann, B. Minimum curvature trajectory planning and control for an autonomous race car. Veh. Syst. Dynam. 2019, 1–31. [Google Scholar] [CrossRef]
- Stahl, T.; Alexander, W.; Betz, J.; Lienkamp, M. Multilayer Graph-Based Trajectory Planning for Race Vehicles in Dynamic Scenarios. In Proceedings of the 2019 IEEE 22nd International Conference on Intelligent Transportation Systems (ITSC 2019), Auckland, New Zealand, 27–30 October 2019. in press. [Google Scholar]
- Racecar Engineering. OptimumG GG-Diagram. 2019. Available online: https://www.racecar-engineering.com/latestissue/july-2018-issue/attachment/opitmumg-g-g-diagram/ (accessed on 23 August 2019).
- Stahl, T.; Wischnewski, A.; Betz, J.; Lienkamp, M. ROS-based localization of a race vehicle at high-speed using LIDAR. E3S Web Conf. 2019, 95, 04002. [Google Scholar] [CrossRef]
- Wischnewski, A.; Stahl, T.; Betz, J.; Lohmann, B. Vehicle Dynamics State Estimation and Localization for High Performance Race Cars. IFAC-PapersOnLine 2019, 52, 154–161. [Google Scholar] [CrossRef]
- Herrmann, T.; Christ, F.; Betz, J.; Lienkamp, M. Energy Management Strategy for an Autonomous Electric Racecar using Optimal Control. In Proceedings of the 2019 IEEE 22nd International Conference on Intelligent Transportation Systems (ITSC 2019), Auckland, New Zealand, 27–30 October 2019. in press. [Google Scholar]
- Gosavi, M.A.; Rhoades, B.B.; Conrad, J.M. Application of Functional Safety in Autonomous Vehicles Using ISO 26262 Standard: A Survey. In Proceedings of the SoutheastCon 2018, Saint Petersburg, FL, USA, 19–22 April 2018. [Google Scholar] [CrossRef]
- Wachenfeld, W.; Winner, H. Die Freigabe des autonomen Fahrens. In Autonomes Fahren: Technische, Rechtliche und Gesellschaftliche Aspekte; Maurer, M., Gerdes, J.C., Lenz, B., Winner, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 439–464. [Google Scholar] [CrossRef]
- Ponn, T.; Fratzke, D.; Gnandt, C.; Lienkamp, M. Towards certification of autonomous driving: Systematic test case generation for a comprehensive but economically-feasible assessment of lane keeping assist algorithms. In Proceedings of the 5th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2019), Heraklion, Greece, 3–5 May 2019; pp. 333–342. [Google Scholar]
- Ponn, T.; Gnandt, C.; Diermeyer, F. An Optimization-based Method to Identify Relevant Scenarios for Type Approval of Automated Vehicles. In Proceedings of the ESV—International Technical Conference on the Enhanced Safety of Vehicles, Eindhoven, The Netherlands, 10–13 June 2019. [Google Scholar]
- Hermansdorfer, L.; Betz, J.; Lienkamp, M. A Concept for Estimation and Prediction of the Tire-Road Friction Potential for an Autonomous Racecar. In Proceedings of the 2019 IEEE 22nd International Conference on Intelligent Transportation Systems (ITSC 2019), Auckland, New Zealand, 27–30 October 2019. in press. [Google Scholar]
- Wischnewski, A.; Betz, J.; Lohmann, B. A Model-Free Algorithm to Safely Approach the Handling Limit of an Autonomous Racecar. In Proceedings of the 8th IEEE International Conference on Connected Vehicles and Expo (ICCVE 2019), Graz, Austria, 4–8 November 2019. in press. [Google Scholar]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Betz, J.; Heilmeier, A.; Wischnewski, A.; Stahl, T.; Lienkamp, M. Autonomous Driving—A Crash Explained in Detail. Appl. Sci. 2019, 9, 5126. https://doi.org/10.3390/app9235126
Betz J, Heilmeier A, Wischnewski A, Stahl T, Lienkamp M. Autonomous Driving—A Crash Explained in Detail. Applied Sciences. 2019; 9(23):5126. https://doi.org/10.3390/app9235126
Chicago/Turabian StyleBetz, Johannes, Alexander Heilmeier, Alexander Wischnewski, Tim Stahl, and Markus Lienkamp. 2019. "Autonomous Driving—A Crash Explained in Detail" Applied Sciences 9, no. 23: 5126. https://doi.org/10.3390/app9235126
APA StyleBetz, J., Heilmeier, A., Wischnewski, A., Stahl, T., & Lienkamp, M. (2019). Autonomous Driving—A Crash Explained in Detail. Applied Sciences, 9(23), 5126. https://doi.org/10.3390/app9235126