Artificial Intelligence-Based Controller for DC-DC Flyback Converter

 ,
,  ,
,  , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
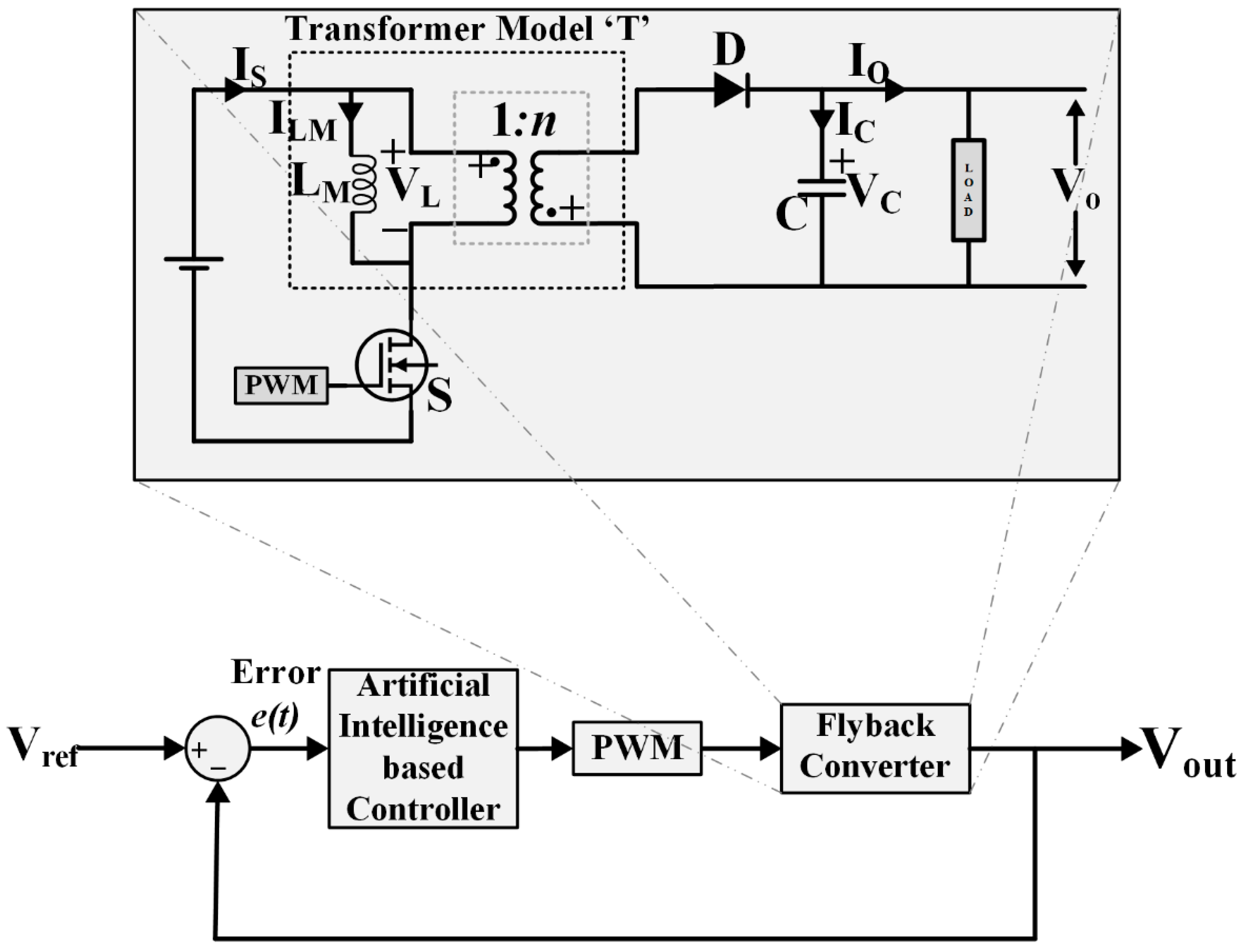
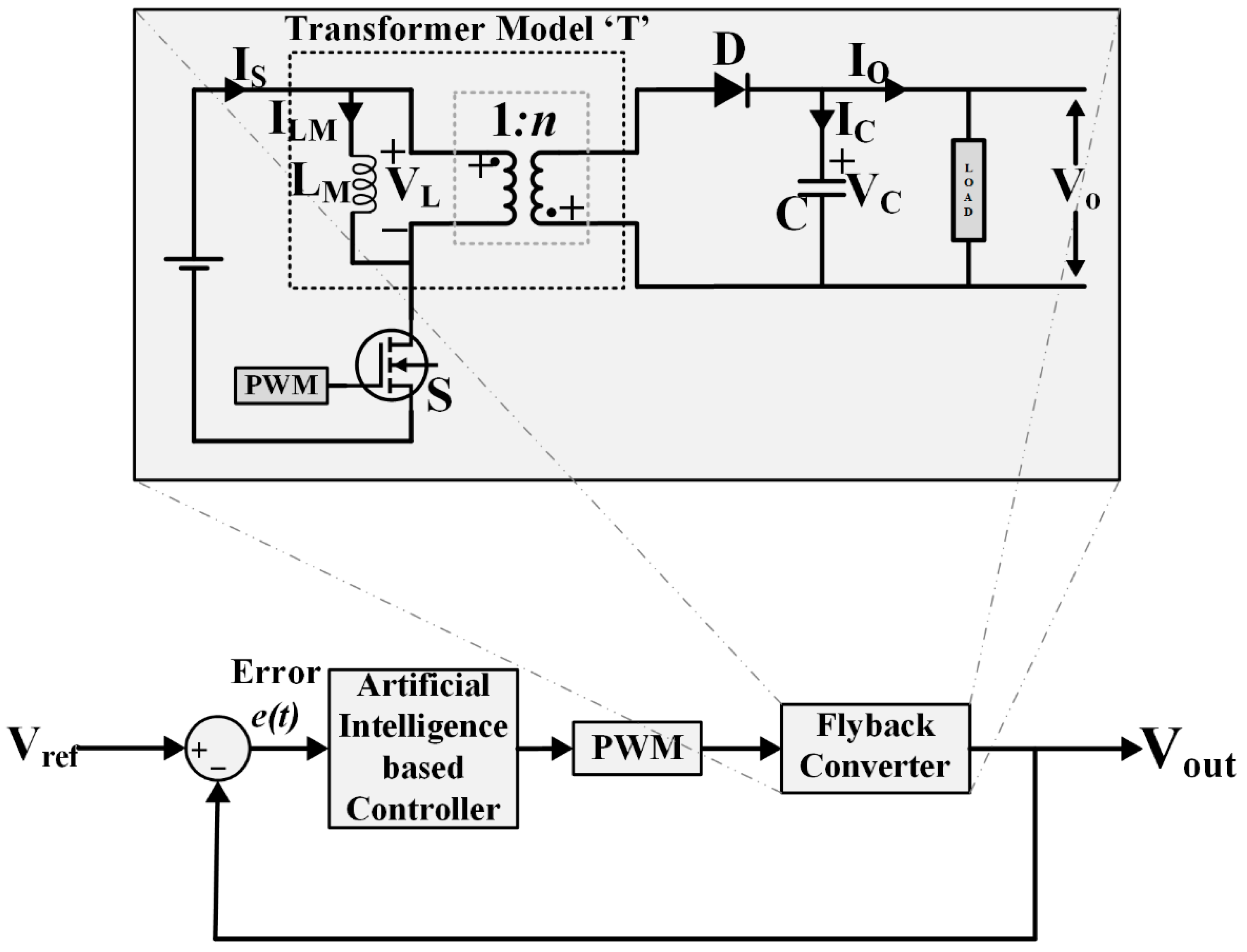
2. Modeling of Flyback Converter
3. Design of FC with Specifications
4. Controller Design
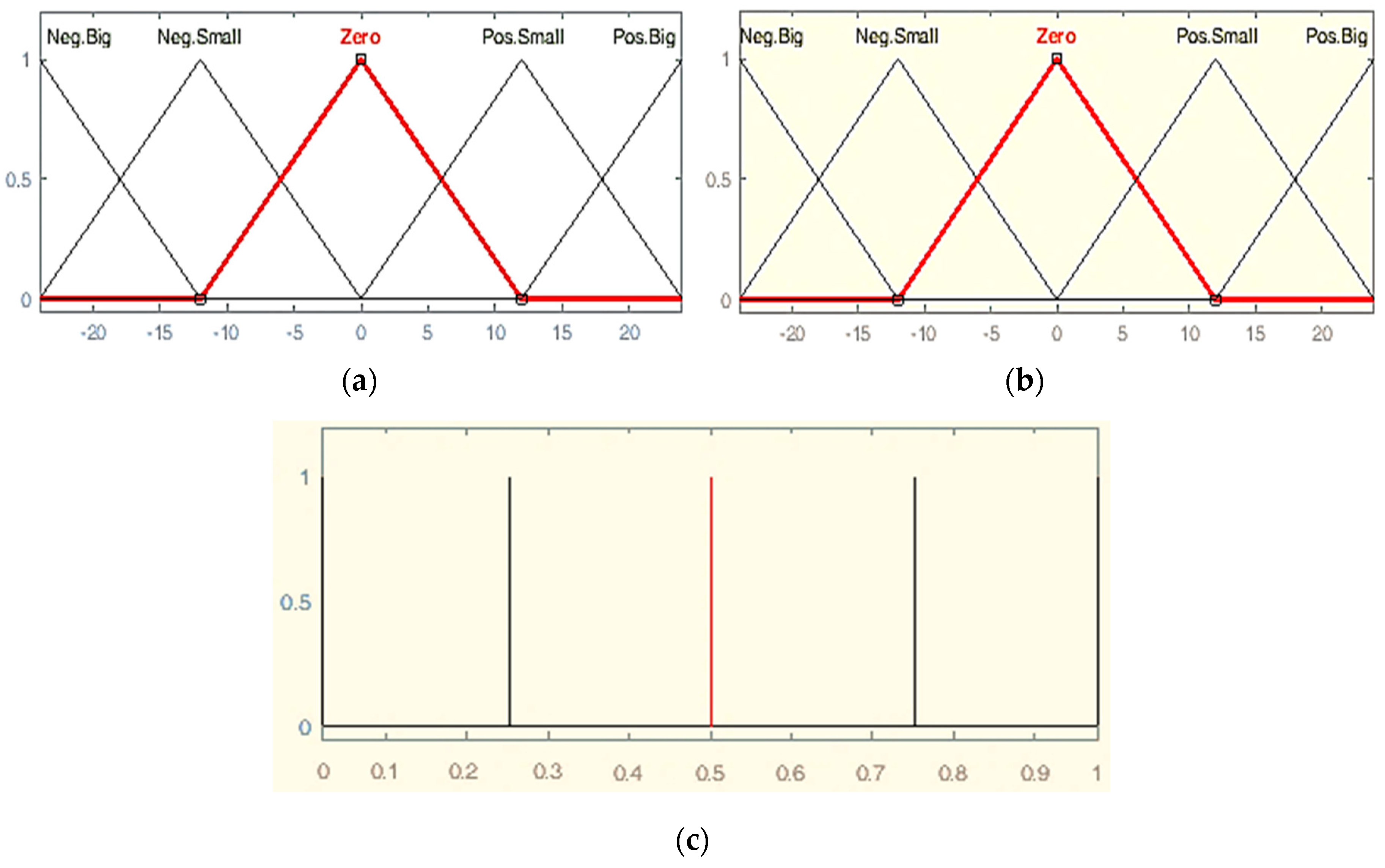
4.1. FLC
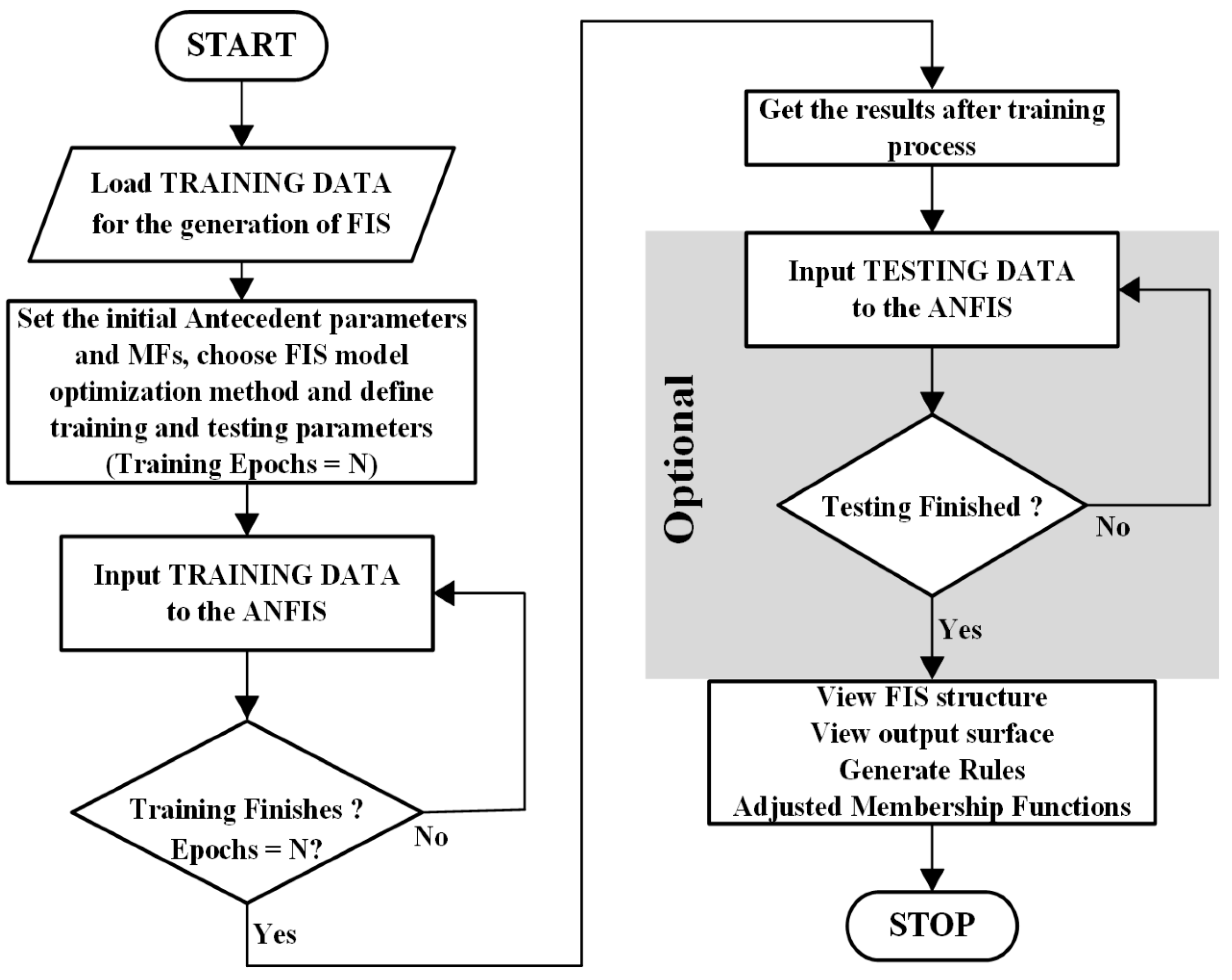
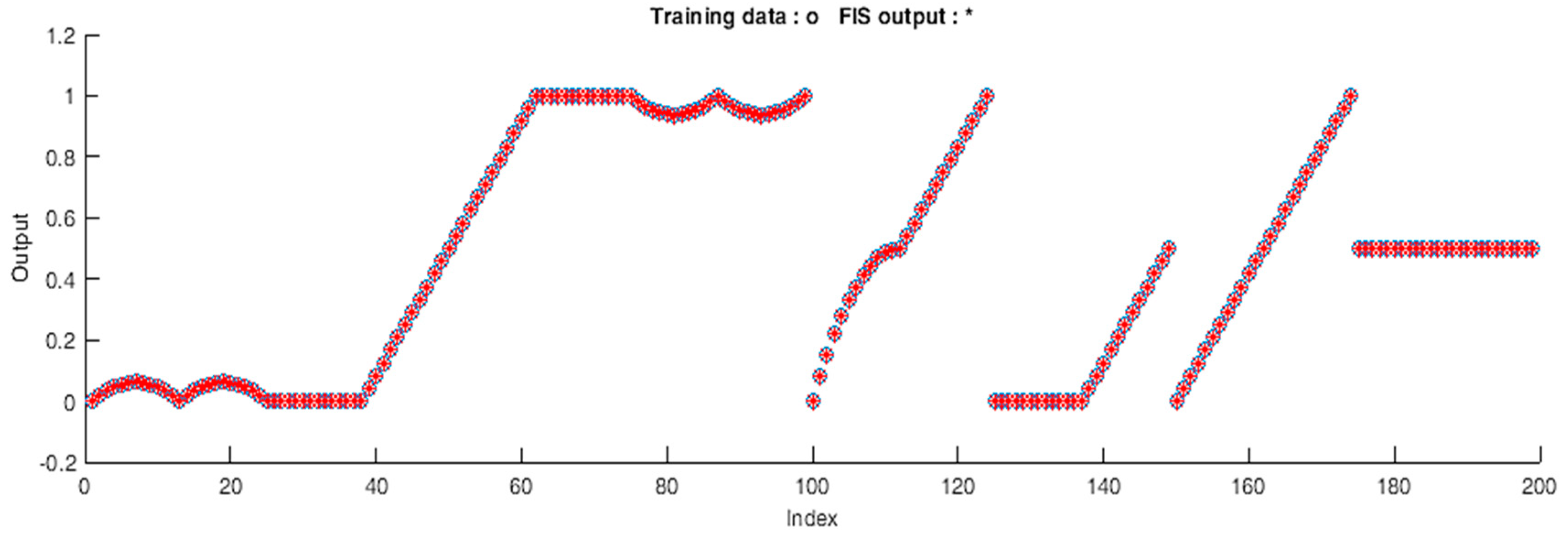
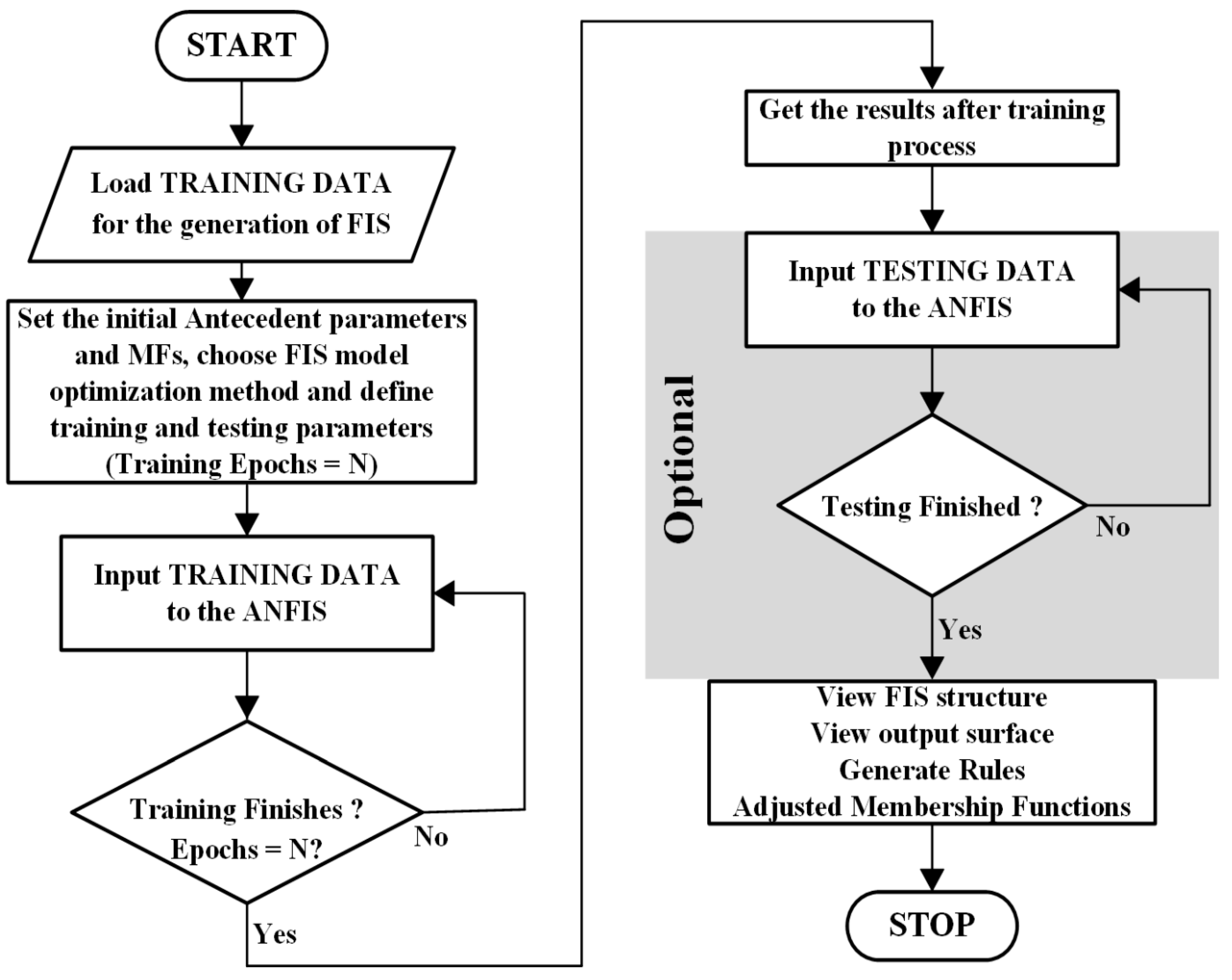
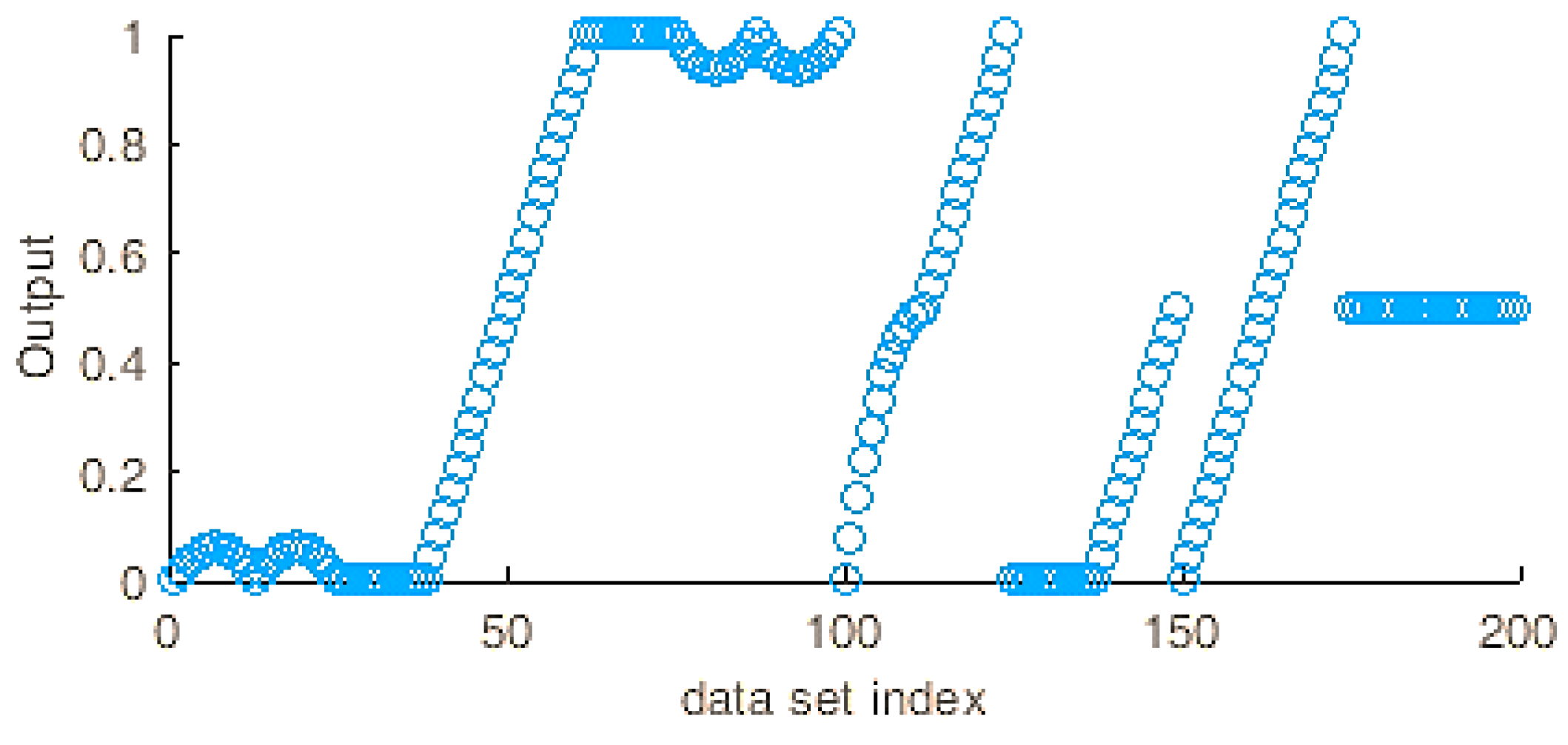
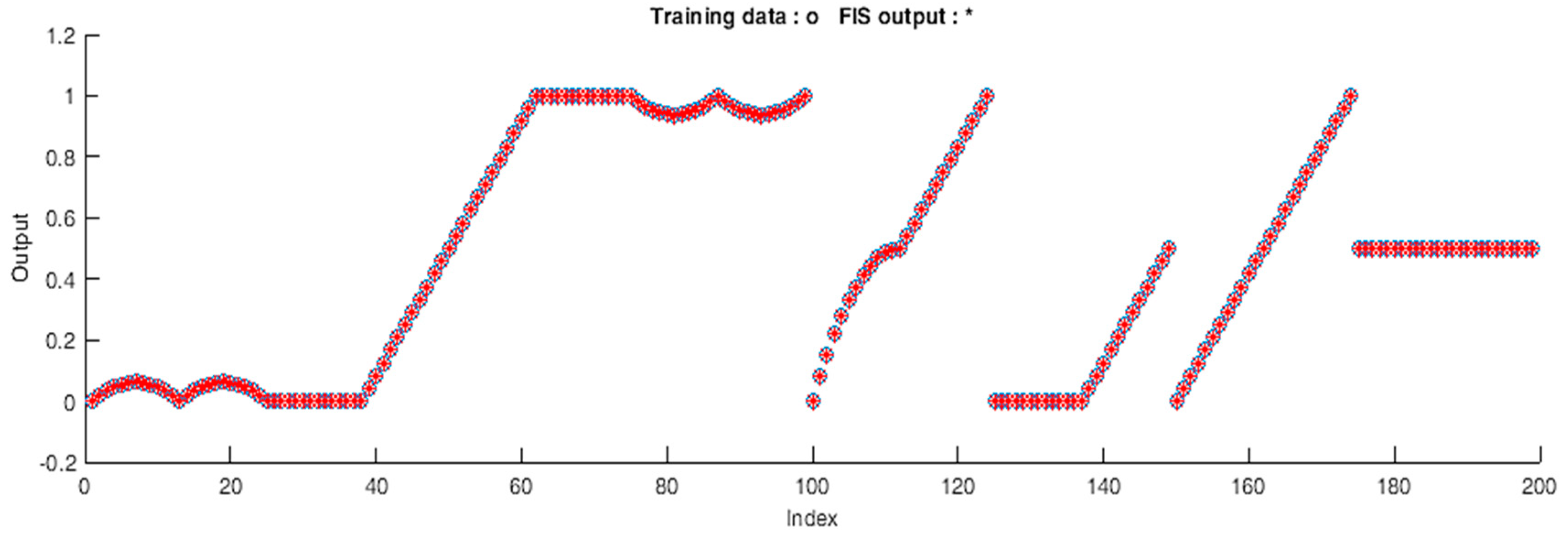
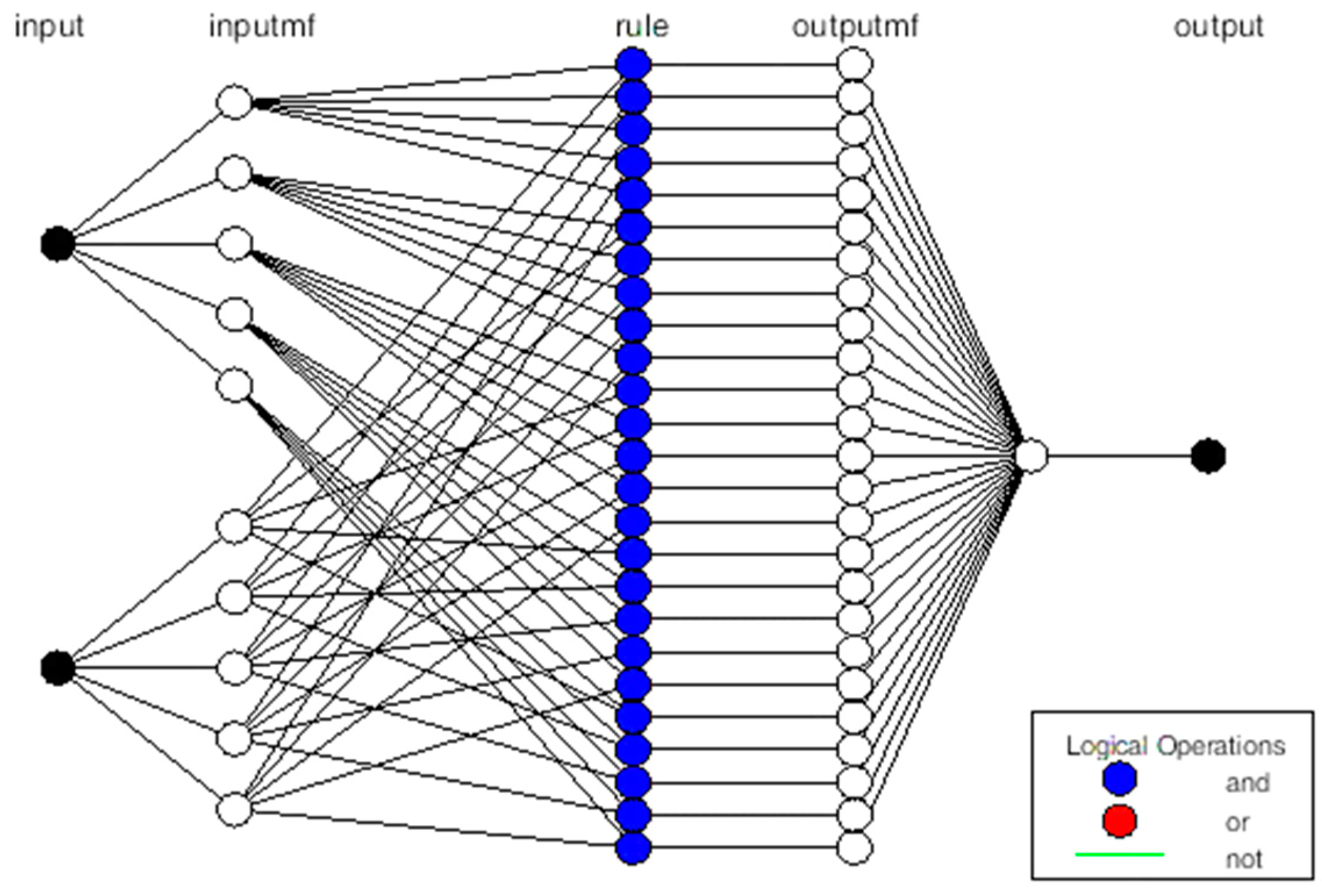
4.2. ANFIS-Based Controller
4.2.1. Layer 1
4.2.2. Layer 2
4.2.3. Layer 3
4.2.4. Layer 4
4.2.5. Layer 5
4.3. PID Controller
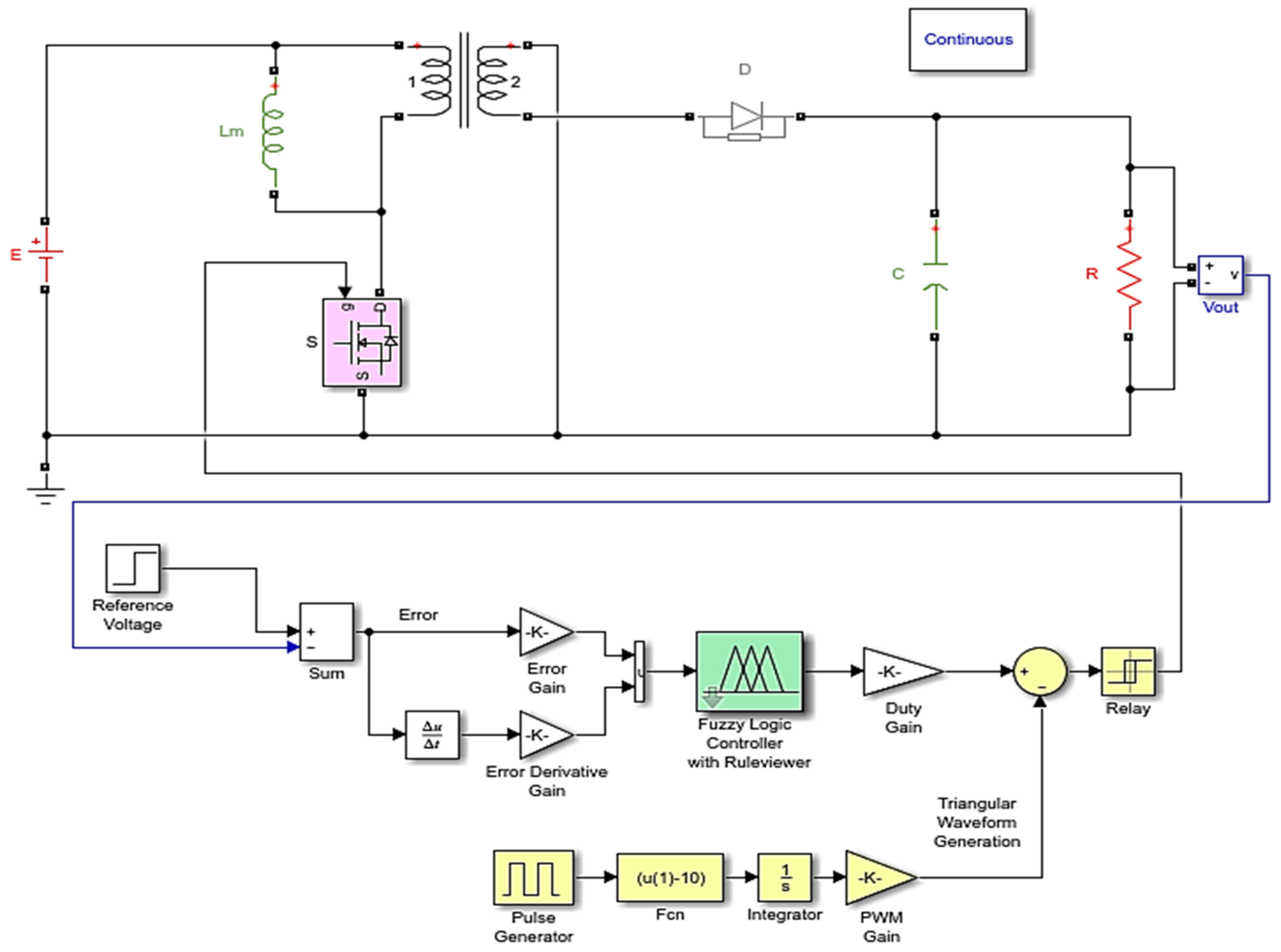
5. Results and Discussion
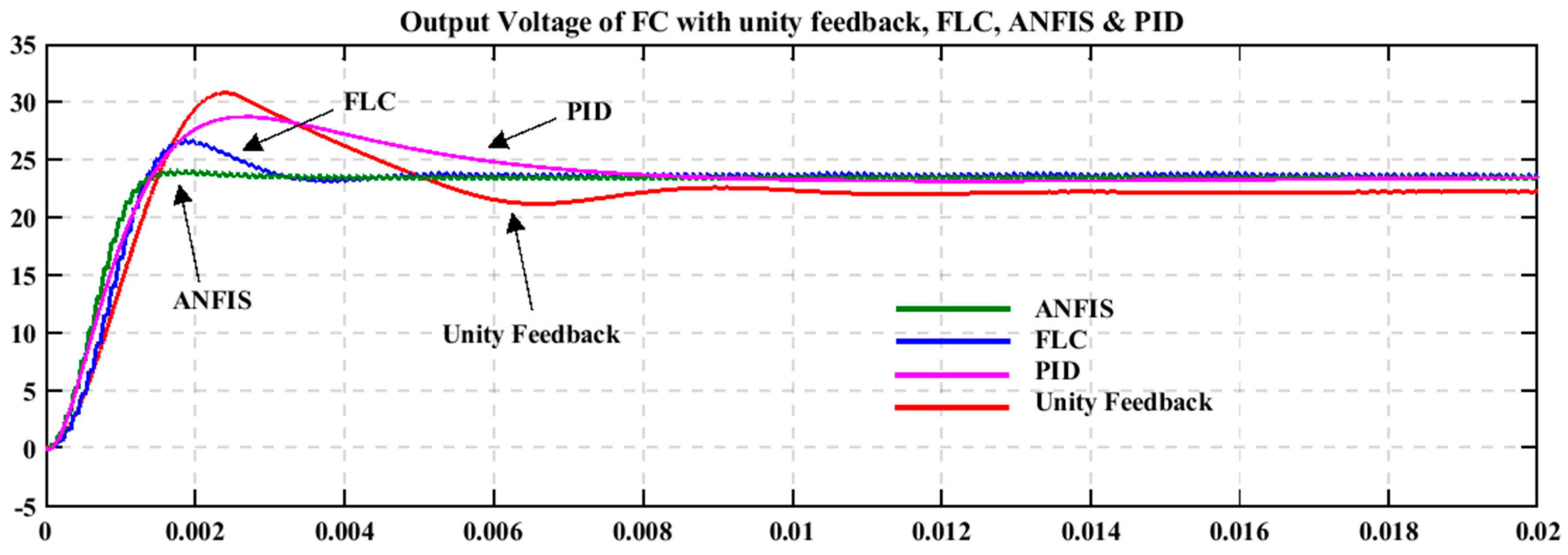
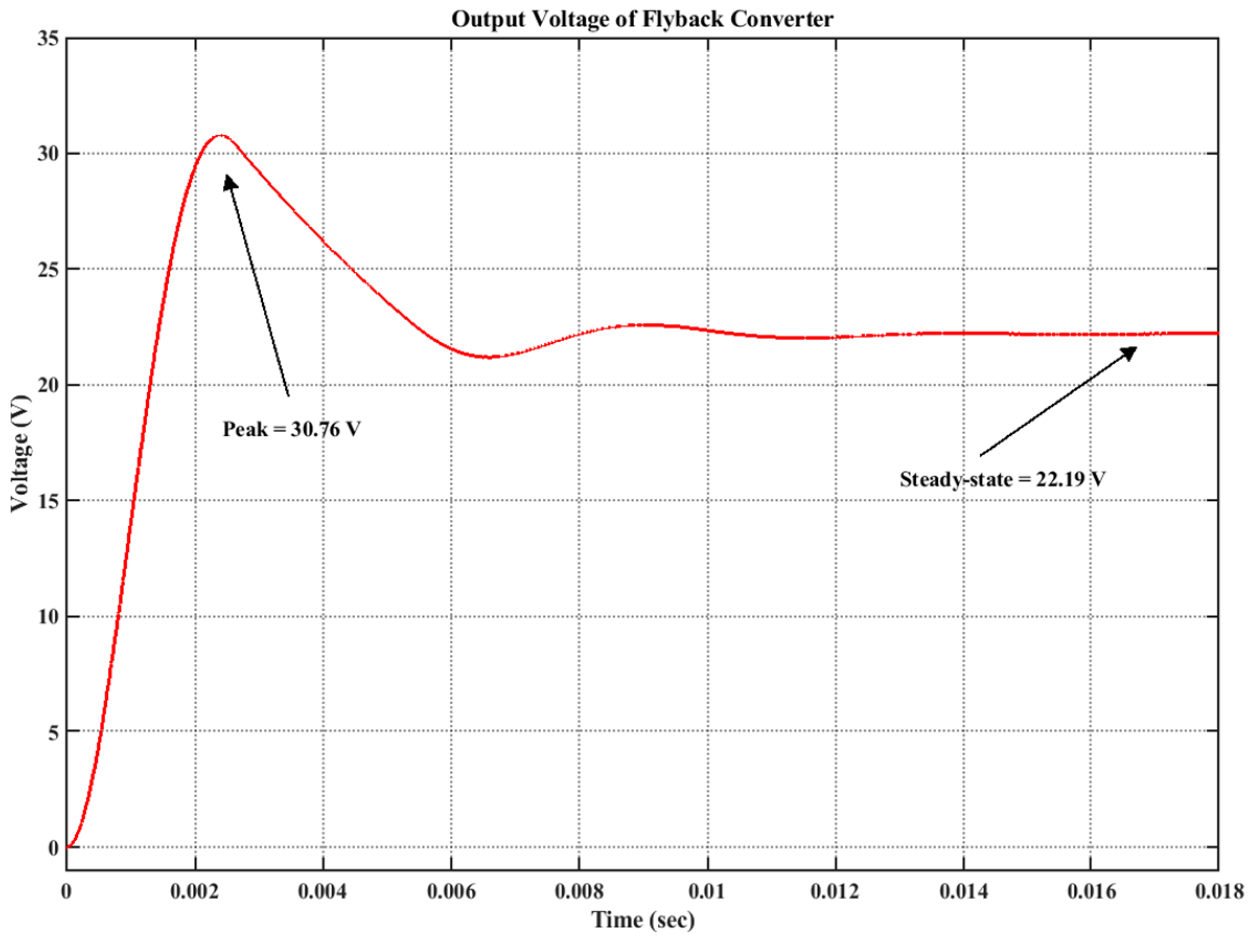
5.1. Nominal Performance
5.2. Load Regulation
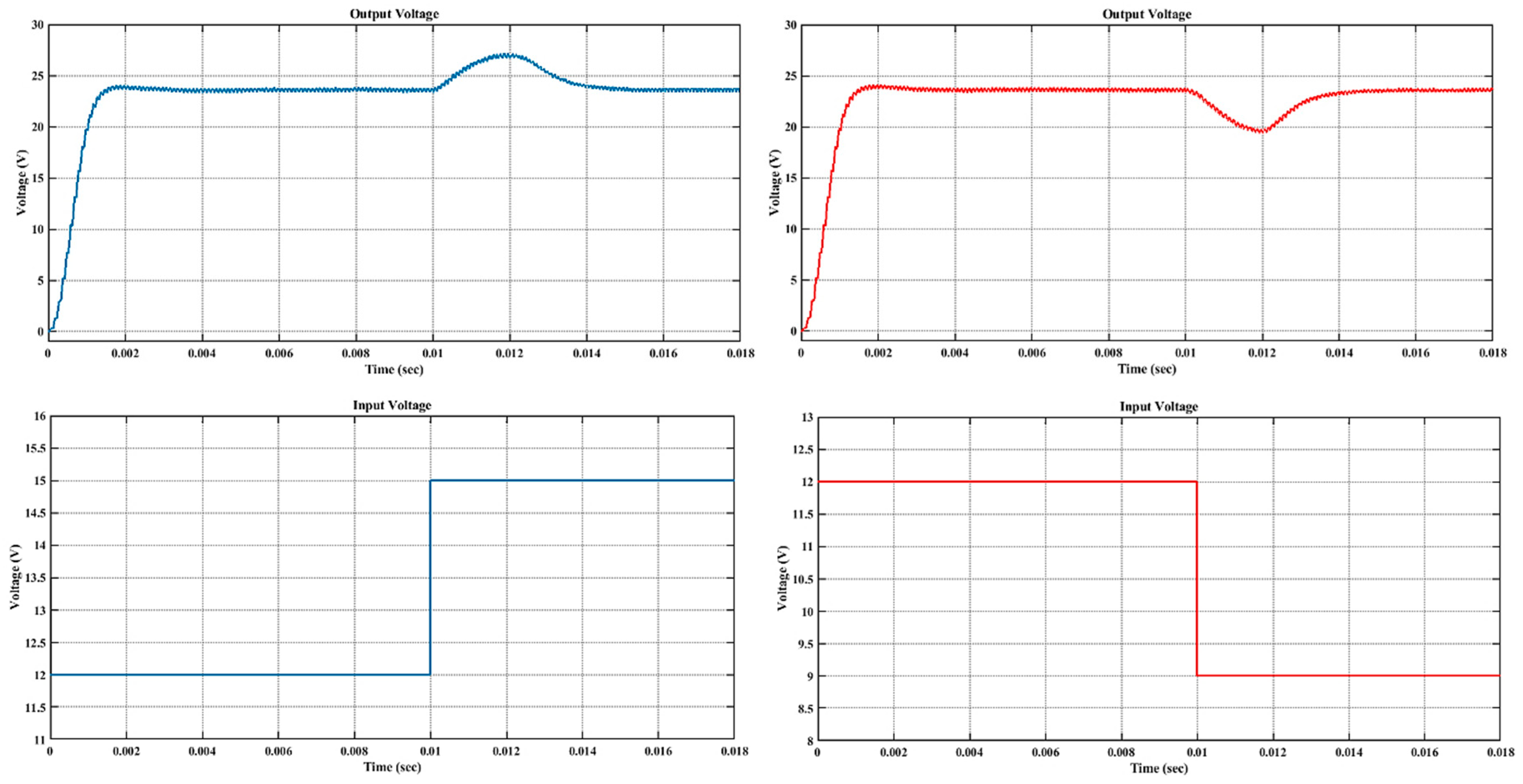
5.3. Line Regulation
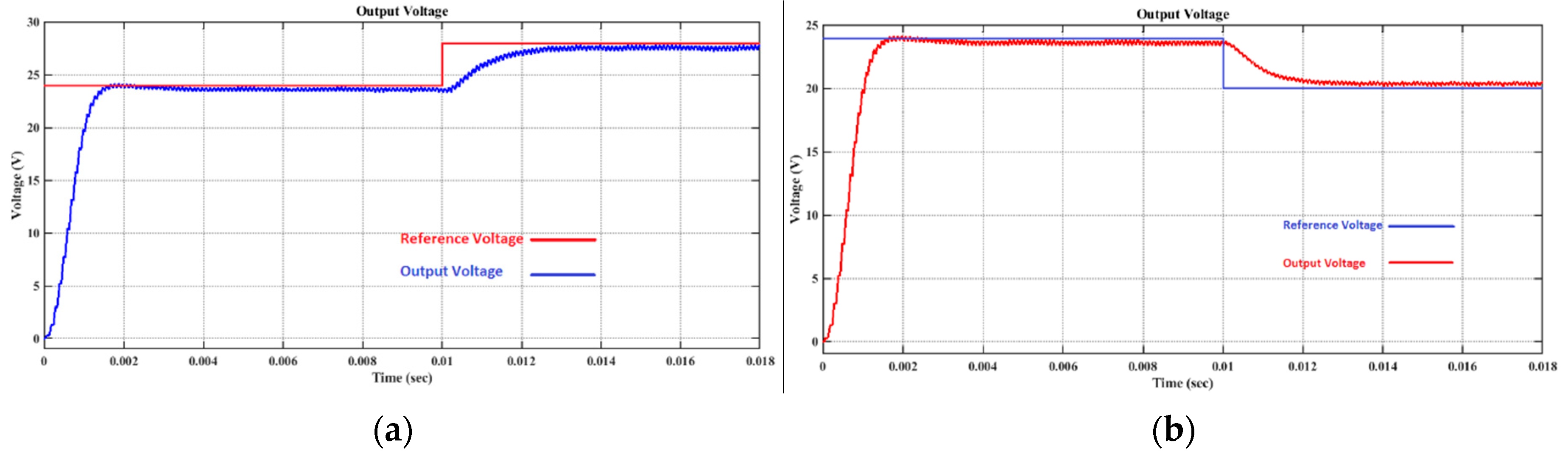
5.4. Change in Reference Voltage
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inputs | Output | Inputs | Output | Inputs | Output | |||
|---|---|---|---|---|---|---|---|---|
| e | Δe | d | e | Δe | d | e | Δe | d |
| 15.1067 | 6.9273 | 0.929 | −17.346 | 8.6269 | 0.4953 | −17.0141 | −15.9759 | 0 |
| 19.478 | −5.8267 | 0.783 | −16.8339 | −17.4454 | 0 | −17.4687 | −18.9016 | 0 |
| −17.9046 | 14.9559 | 0.6263 | −11.6396 | 10.6189 | 0.4825 | 17.726 | −6.1243 | 0.7414 |
| 19.842 | 1.5756 | 0.9281 | 16.3544 | −18.8754 | 0.4495 | 3.8258 | −14.4903 | 0.2735 |
| 6.3532 | −7.1651 | 0.4824 | −11.7945 | 7.3804 | 0.4117 | 2.3933 | −0.495 | 0.5412 |
| −19.3181 | 21.0721 | 0.6084 | 15.0857 | −0.2797 | 0.8154 | −17.0422 | −7.7043 | 0.0462 |
| −10.6321 | 18.0453 | 0.65 | −12.3108 | 13.3945 | 0.5486 | 16.9455 | 21.6783 | 1 |
| 2.2503 | 2.4075 | 0.6011 | 20.6047 | 10.3218 | 0.9929 | 5.8586 | 20.1759 | 0.9624 |
| 21.9603 | 5.8788 | 0.98 | −7.2008 | 19.3786 | 0.7512 | −7.1543 | −21.4715 | 0.0192 |
| 22.3146 | 4.1781 | 0.9785 | −14.5634 | 18.7643 | 0.6353 | 0.636 | 11.4172 | 0.7616 |
| −16.4346 | −14.0284 | 0 | −11.948 | −7.9602 | 0.0746 | −4.7132 | −11.0823 | 0.1572 |
| 22.5885 | −9.5402 | 0.7647 | 5.5701 | 9.5398 | 0.8279 | −20.3536 | −3.7039 | 0.0496 |
| 21.944 | −1.3957 | 0.9285 | −1.2821 | −14.5051 | 0.169 | −12.484 | 2.2978 | 0.2883 |
| −0.702 | −12.9366 | 0.2081 | −7.1203 | −22.534 | 0.0112 | −18.0807 | 21.2514 | 0.6214 |
| 14.4135 | 16.5268 | 1 | 15.8798 | 11.7156 | 1 | −15.1724 | −3.9483 | 0.1162 |
| −17.1895 | −14.6513 | 0 | 4.0927 | 0.0011 | 0.5888 | −12.4823 | 23.1865 | 0.7169 |
| −3.7555 | −13.1558 | 0.1464 | 2.3867 | −0.9637 | 0.5309 | −3.9712 | −9.5302 | 0.207 |
| 19.9553 | −15.806 | 0.5831 | 20.0253 | 19.4267 | 1 | −21.6166 | 9.6527 | 0.5962 |
| 14.026 | −13.0721 | 0.5191 | −10.2797 | 5.2736 | 0.3914 | 19.3304 | 7.9843 | 0.9713 |
| 22.0556 | −3.0865 | 0.8941 | 12.3456 | 5.648 | 0.881 | 21.3498 | 1.8781 | 0.9556 |
| 7.4756 | −9.0671 | 0.4655 | 12.179 | 17.2532 | 1 | −0.4385 | 9.5091 | 0.6968 |
| −22.2858 | 20.3222 | 0.5878 | −5.7386 | 14.6635 | 0.6884 | −0.5159 | 7.9933 | 0.6623 |
| 16.7582 | −3.35 | 0.7822 | 3.2554 | 3.6826 | 0.6506 | −7.7895 | −15.4496 | 0.0555 |
| 20.8317 | −15.1288 | 0.6142 | −20.359 | −15.2197 | 0 | 19.2026 | −17.8553 | 0.527 |
| 8.5793 | 19.4343 | 0.9767 | −21.4104 | −12.4833 | 0 | −6.2762 | 23.9559 | 0.8629 |
| 12.3715 | 23.0279 | 1 | 1.4783 | 18.5526 | 0.9049 | −18.6623 | −15.7862 | 0 |
| 11.6704 | −2.9342 | 0.6893 | 13.4 | −22.6236 | 0.3152 | 13.4521 | −22.4352 | 0.3201 |
| −5.1731 | −18.6663 | 0.0589 | 20.8325 | −0.4847 | 0.926 | −5.2925 | 2.9376 | 0.4489 |
| 7.4629 | −11.6129 | 0.4101 | −17.7645 | −15.9395 | 0 | −12.3988 | 18.3296 | 0.6348 |
| −15.783 | −4.3814 | 0.102 | 3.3035 | 22.9767 | 0.9854 | −4.6122 | 8.1204 | 0.5761 |
| 9.8902 | 4.555 | 0.8135 | −1.4692 | 10.2093 | 0.6897 | −19.3702 | −14.8592 | 0 |
| −22.472 | −11.4138 | 0.0003 | −23.4287 | 0.0226 | 0.0129 | −17.6653 | −6.292 | 0.0576 |
| −10.7077 | 4.9365 | 0.3748 | −7.8181 | −1.3878 | 0.3002 | 21.2184 | −1.8852 | 0.9034 |
| −21.7838 | 10.1384 | 0.6263 | −16.2152 | −21.1383 | 0 | 21.8945 | 23.1186 | 1 |
| −19.3377 | −13.3562 | 0 | 14.1257 | 8.7347 | 0.9522 | 3.61 | −16.4926 | 0.2287 |
| 15.526 | −18.364 | 0.4431 | −9.0617 | −21.9633 | 0.0087 | −21.1306 | 17.0651 | 0.6325 |
| 9.3518 | −9.7596 | 0.4912 | 1.3696 | −20.5706 | 0.0984 | −12.7306 | 6.9487 | 0.4058 |
| −8.7792 | −8.6986 | 0.1207 | −16.0489 | 1.0392 | 0.1982 | −7.0484 | −5.9389 | 0.2182 |
| 21.6107 | −3.64 | 0.8731 | 4.8951 | −19.357 | 0.1992 | 15.4173 | −14.8357 | 0.5117 |
| −22.3466 | 0.3772 | 0.0555 | −11.3774 | 15.2711 | 0.5782 | −23.2606 | −3.4439 | 0.0104 |
| −2.9403 | −19.8952 | 0.0612 | 7.3958 | 15.2423 | 0.9372 | −21.9349 | −0.8629 | 0.0383 |
| −5.6852 | −11.4009 | 0.1292 | 9.0823 | 10.6771 | 0.9288 | −15.8885 | −18.2106 | 0 |
| 12.7448 | 14.4487 | 1 | 11.9113 | −16.8065 | 0.4019 | 7.1575 | 4.2964 | 0.7486 |
| 14.1696 | −22.5974 | 0.3312 | −2.374 | 7.6611 | 0.6147 | 11.1227 | −13.143 | 0.4589 |
| −15.0301 | 20.585 | 0.6498 | −19.9766 | 0.8926 | 0.1262 | 7.0918 | −5.5383 | 0.5337 |
| −0.4913 | 11.0559 | 0.7293 | −13.0091 | 22.7028 | 0.7004 | −2.3557 | 3.9833 | 0.5353 |
| −2.6119 | −0.5468 | 0.4315 | 19.8402 | 7.1516 | 0.9684 | 2.2564 | −11.9133 | 0.2911 |
| 7.023 | 3.7692 | 0.7342 | −16.6859 | 14.4159 | 0.6135 | −9.7766 | −10.0588 | 0.0695 |
| 10.0495 | −12.6104 | 0.4462 | 15.6392 | −2.2177 | 0.7844 | 11.7453 | 5.6204 | 0.8743 |
| 12.225 | −1.9753 | 0.7213 | 1.8404 | −3.2452 | 0.4695 | −14.9302 | −11.2665 | 0.004 |
| −10.7508 | 22.2282 | 0.7312 | 23.8145 | 15.6151 | 1 | 8.9652 | 15.5701 | 0.9625 |
| 8.6257 | 2.2467 | 0.7359 | −20.2476 | −19.9934 | 0 | −15.1915 | 23.1678 | 0.6696 |
| 7.4447 | 1.0145 | 0.6836 | −2.7514 | −17.6078 | 0.0975 | −6.3127 | 11.0519 | 0.6028 |
| −16.1946 | −12.8835 | 0 | −18.8807 | −15.6773 | 0 | 6.0297 | −7.4939 | 0.4682 |
| −18.2881 | −0.5329 | 0.1091 | 22.1711 | −5.235 | 0.8498 | 13.4509 | 4.0353 | 0.8627 |
| −0.0785 | 5.9549 | 0.6275 | −23.7776 | 15.9062 | 0.6608 | −20.106 | −18.8271 | 0 |
| 22.0677 | 8.5985 | 0.9902 | 13.1957 | 14.5615 | 1 | 20.6105 | 19.5028 | 1 |
| −7.6615 | −5.0153 | 0.2249 | 15.2306 | −21.0974 | 0.3825 | 13.2342 | 18.2234 | 1 |
| 4.0929 | −6.363 | 0.4507 | 17.6973 | −4.8356 | 0.7688 | −0.634 | 15.2525 | 0.811 |
| −13.257 | 23.4231 | 0.7069 | −19.9471 | 1.29 | 0.147 | −3.0788 | −11.4851 | 0.1839 |
| 12.0608 | −22.1885 | 0.2971 | −4.8104 | −3.9936 | 0.3089 | −2.5544 | 4.5291 | 0.5429 |
| −11.7554 | 18.4881 | 0.639 | −11.5262 | 7.5293 | 0.4134 | −9.2952 | −22.9194 | 0.0042 |
| 0.2859 | 19.8378 | 0.9187 | 14.4033 | 6.1427 | 0.9103 | 0.4084 | −3.5876 | 0.431 |
| 9.5557 | 14.2168 | 0.9666 | −3.2921 | −9.9848 | 0.2119 | 0.517 | −8.9895 | 0.3161 |
| 18.7634 | −19.2618 | 0.49 | 19.7111 | −3.2807 | 0.8429 | 15.2461 | −16.2487 | 0.4799 |
| 22.046 | −11.4302 | 0.7128 | −15.2713 | −23.2566 | 0 | 14.1519 | −15.4192 | 0.4746 |
| 2.2663 | −7.9029 | 0.3777 | −11.3375 | 23.2351 | 0.7386 | −21.3612 | 21.2644 | 0.5845 |
References
- Sarif, M.S.M.; Pei, T.X.; Annuar, A.Z. Modeling, design and control of bidirectional DC-DC converter using state-space average model. In Proceedings of the IEEE Symposium on Computer Applications & Industrial Electronics (ISCAIE), Penang, Malaysia, 28–29 April 2018; pp. 416–421. [Google Scholar]
- Jiang, W.; Chincholkar, S.H.; Chan, C. Investigation of a Voltage-Mode Controller for a dc-dc Multilevel Boost Converter. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 908–912. [Google Scholar] [CrossRef]
- MShahid, A.; Yasin, A.R.; Ahmad, S. Practical sliding mode controller in Dc-Dc converters for use in hybrid vehicles. In Proceedings of the 19th International Multi-Topic Conference (INMIC), Islamabad, Pakistan, 5–6 December 2016; pp. 1–7. [Google Scholar]
- Wang, C. A Novel ZCS-PWM Flyback Converter with a Simple ZCS-PWM Commutation Cell. IEEE Trans. Ind. Electron. 2008, 55, 749–757. [Google Scholar] [CrossRef]
- Iqbal, H.K.; Abbas, G. Design and analysis of SMC for second order DC-DC flyback converter. In Proceedings of the 17th IEEE International Multi Topic Conference 2014, Karachi, Pakistan, 8–10 December 2014; pp. 533–538. [Google Scholar]
- Tamyurek, B.; Torrey, D.A. A Three-Phase Unity Power Factor Single-Stage AC–DC Converter Based on an Interleaved Flyback Topology. IEEE Trans. Power Electron. 2011, 26, 308–318. [Google Scholar] [CrossRef]
- Ohsato, T.; Satoh, N.; Sekiya, H. A flyback converter using power-MOSFETs to achieve high-frequency operation beyond 10MHz. In Proceedings of the IEEE 3rd International Future Energy Electronics Conference and ECCE Asia, Kaohsiung, Taiwan, 3–7 June 2017; pp. 1101–1105. [Google Scholar]
- Xie, X.; Li, J.; Peng, K.; Zhao, C.; Lu, Q. Study on the Single-Stage Forward-Flyback PFC Converter With QR Control. IEEE Trans. Power Electron. 2016, 31, 430–442. [Google Scholar] [CrossRef]
- Hwu, K.; Jiang, W. Isolated step-up converter based on flyback converter and charge pumps. IET Power Electron. 2014, 7, 2250–2257. [Google Scholar] [CrossRef]
- Nymand, M.; Andersen, M.A.E. High-Efficiency Isolated Boost DC–DC Converter for High-Power Low-Voltage Fuel-Cell Applications. IEEE Trans. Ind. Electron. 2010, 57, 505–514. [Google Scholar] [CrossRef]
- Yousefzadeh, V.; Shirazi, M.; Maksimovic, D. Minimum Phase Response in Digitally Controlled Boost and Flyback Converters. In Proceedings of the APEC—Twenty-Second Annual IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 25 February–1 March 2007; pp. 865–870. [Google Scholar]
- Verma, S.; Singh, S.K.; Rao, A.G. Overview of control Techniques for FC-FC converter. Res. J. Eng. Sci. 2013, 2, 18–21. [Google Scholar]
- Tan, S.; Lai, Y.M.; Tse, C.K.; Martinez-Salamero, L.; Wu, C. A Fast-Response Sliding-Mode Controller for Boost-Type Converters with a Wide Range of Operating Conditions. IEEE Trans. Ind. Electron. 2007, 54, 3276–3286. [Google Scholar] [CrossRef]
- Salimi, M.; Soltani, J.; Zakipour, A.; Hajbani, V. Sliding mode control of the DC-DC flyback converter with zero steady-state error. In Proceedings of the 4th Annual International Power Electronics, Drive Systems and Technologies Conference, Tehran, Iran, 13–14 February 2013; pp. 158–163. [Google Scholar]
- He, J.; Xu, J.; Yan, T. Peak current-controlled CRM flyback PFC converter with square of line voltage-compensated primary current envelope. Electron. Lett. 2015, 51, 684–686. [Google Scholar] [CrossRef]
- Chandranadhan, V.R.; Renjini, G. Average current mode control of improved bridgeless flyback rectifier with bidirectional switch. In Proceedings of the International Conference on Circuits, Power and Computing Technologies [ICCPCT-2015], Nagercoil, India, 19–20 March 2015; pp. 1–6. [Google Scholar]
- Park, J.; Moon, Y.J.; Jeong, M.G.; Kang, J.G.; Kim, S.H.; Gong, J.C.; Yoo, C. Quasi-Resonant (QR) Controller with Adaptive Switching Frequency Reduction Scheme for Flyback Converter. IEEE Trans. Ind. Electron. 2016, 63, 3571–3581. [Google Scholar] [CrossRef]
- Chen, K.; Liang, T. Design of Quasi-resonant flyback converter control IC with DCM and CCM operation. In Proceedings of the International Power Electronics Conference, Hiroshima, Japan, 18–21 May 2014; pp. 2750–2753. [Google Scholar]
- Dogra, A.; Pal, K. Designing and Tuning of PI Controller for Flyback Converter. Int. J. Eng. Trends Technol. (IJETT) 2014, 13, 117–122. [Google Scholar] [CrossRef]
- Modak, S.; Panda, G.K.; Saha, P.K.; Das, S. Design of Novel Fly-Back Converter Using PID Controller. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2015, 4, 289–297. [Google Scholar]
- Priyadarshini, D.; Rai, S. Design, Modelling and Simulation of a PID Controller for Buck Boost and Cuk Converter. Int. J. Sci. Res. (IJSR) 2014, 3, 1226–1229. [Google Scholar]
- Yilmaz, U.; Kircay, A.; Borekci, S. PV system flyback converter-controlled PI control to charge battery under variable temperature and irradiance. In Proceedings of the Electronics, Palanga, Lithuania, 19–21 June 2017; pp. 1–6. [Google Scholar]
- Chen, T.H.; Lin, W.L.; Liaw, C.M. Dynamic modelling and controller design of flyback converter. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 1230–1239. [Google Scholar] [CrossRef]
- Garcia-Rodriguez, L.A.; Williams, E.; Balda, J.C.; Gonzalez-Llorente, J.; Chiacchiarini, H. Control of a flyback converter operating in BCM using the natural switching surface. In Proceedings of the IEEE 6th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aachen, Germany, 22–25 June 2015; pp. 1–8. [Google Scholar]
- Chen, X.; Jiang, T.; Zhao, S.; Zeng, H.; Zhang, J. Evaluation of primary side control schemes for flyback converter with constant current output. In Proceedings of the Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013; pp. 1859–1863. [Google Scholar]
- Singh, A.; Londhe, P.S. Design of signed distance method based fuzzy logic controller for TITO process. In Proceedings of the Recent Developments in Control, Automation & Power Engineering (RDCAPE), Noida, India, 26–27 October 2017; pp. 13–17. [Google Scholar]
- Fahmizal; Kuo, C. Development of a fuzzy logic wall following controller for steering mobile robots. In Proceedings of the International Conference on Fuzzy Theory and Its Applications (iFUZZY), Taipei, Taiwan, 6–8 December 2013; pp. 7–12. [Google Scholar]
- Deepa, K.; Jeyanthi, R.; Mohan, S.; Kumar, M.V. Fuzzy based flyback converter. In Proceedings of the International Conference on Advances in Electrical Engineering (ICAEE), Vellore, India, 9–11 January 2014; pp. 1–4. [Google Scholar]
- Subbarao, M.; Babu, C.S.; Satyanarayana, S.; Kumar, S.L.V.S. Fuzzy controlled single stage AC/DC converter with PFC to drive LEDs. In Proceedings of the International Conference on Smart Electric Grid (ISEG), Guntur, India, 19–20 September 2014; pp. 1–5. [Google Scholar]
- Kumar, P.R.; Kumar, S.L.V.S. Comparative Study of PID Based VMC and Fuzzy Logic Controllers for Flyback Converter. Int. J. Instrum. Control Autom. (IJICA) 2011, 1, 29–36. [Google Scholar]
- Hamdan, H.; Garibaldi, J.M. Adaptive neuro-fuzzy inference system (ANFIS) in modelling breast cancer survival. In Proceedings of the International Conference on Fuzzy Systems, Barcelona, Spain, 18–23 July 2010; pp. 1–8. [Google Scholar]
- Hosseini, S.A.; Afrakoti, I.E.P. Evaluation of a new neutron energy spectrum unfolding code based on an Adaptive Neuro-Fuzzy Inference System (ANFIS). J. Radiat. Res. 2018, 59, 436–441. [Google Scholar] [CrossRef]
- Zhai, J.; Zhou, J.; Zhang, L.; Zhao, J.; Hong, W. Dynamic Behavioral Modeling of Power Amplifiers Using ANFIS-Based Hammerstein. IEEE Microw. Wirel. Compon. Lett. 2008, 18, 704–706. [Google Scholar] [CrossRef]
- Farayola, A.M.; Hasan, A.N.; Ali, A. Curve fitting polynomial technique compared to ANFIS technique for maximum power point tracking. In Proceedings of the 8th International Renewable Energy Congress (IREC), Amman, Jordan, 21–23 March 2017; pp. 1–6. [Google Scholar]
- Mohammed, S.S.; Devaraj, D.; Ahamed, T.P.I. Maximum power point tracking system for standalone solar PV power system using Adaptive Neuro-Fuzzy Inference System. In Proceedings of the Biennial International Conference on Power and Energy Systems: Towards Sustainable Energy (PESTSE), Bangalore, India, 21–23 January 2016; pp. 1–4. [Google Scholar]
- Chu, Y.; Yuan, L.; Chiang, H. ANFIS-based maximum power point tracking control of PV modules with DC-DC converters. In Proceedings of the 18th International Conference on Electrical Machines and Systems (ICEMS), Pattaya, Thailand, 25–28 October 2015; pp. 692–697. [Google Scholar]
- Tarek, B.; Said, D.; Benbouzid, M.E.H. Maximum Power Point Tracking Control for Photovoltaic System Using Adaptive Neuro-Fuzzy ANFIS. In Proceedings of the Eighth International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 27–30 March 2013; pp. 1–7. [Google Scholar]
- Noman, A.M.; Addoweesh, K.E.; Alolah, A.I. Simulation and Practical Implementation of ANFIS-Based MPPT Method for PV Applications Using Isolated Ćuk Converter. Int. J. Photoenergy 2017, 2017, 3106734. [Google Scholar] [CrossRef]
- Al-Nussairi, M.K.; Bayindir, R.; Hossain, E. Fuzzy logic controller for Dc-Dc buck converter with constant power load. In Proceedings of the IEEE 6th International Conference on Renewable Energy Research and Applications (ICRERA), San Diego, CA, USA, 5–8 November 2017; pp. 1175–1179. [Google Scholar]
- Feng, G. A Survey on Analysis and Design of Model-Based Fuzzy Control Systems. IEEE Trans. Fuzzy Syst. 2006, 14, 676–697. [Google Scholar] [CrossRef]
- Swathy, M.K.; Jantre, M.S.; Jadhav, M.Y.; Labde, M.S.M.; Kadam, M.P. Design and Hardware Implementation of Closed Loop Buck Converter Using Fuzzy Logic Controller. In Proceedings of the Second International Conference on Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 29–31 March 2018; pp. 175–180. [Google Scholar]
- Bendaoud, K.; Krit, S.; Kabrane, M.; Ouadani, H.; Elaskri, M.; Karimi, K.; Elbousy, H.; Elmaimouni, L. Fuzzy logic controller (FLC): Application to control DC-DC buck converter. In Proceedings of the International Conference on Engineering & MIS (ICEMIS), Monastir, Tunisia, 8–10 May 2017; pp. 1–5. [Google Scholar]
- de Martins, J.K.E.C.; de Araújo, F.M.U. Nonlinear system identification based on modified ANFIS. In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Colmar, France, 21–23 July 2015; pp. 588–595. [Google Scholar]
- García, P.; García, C.A.; Fernández, L.M.; Llorens, F.; Jurado, F. ANFIS-Based Control of a Grid-Connected Hybrid System Integrating Renewable Energies, Hydrogen and Batteries. IEEE Trans. Ind. Inform. 2014, 10, 1107–1117. [Google Scholar] [CrossRef]
- Al-Hmouz, A.; Shen, J.; Al-Hmouz, R.; Yan, J. Modeling and Simulation of an Adaptive Neuro-Fuzzy Inference System (ANFIS) for Mobile Learning. IEEE Trans. Learn. Technol. 2012, 5, 226–237. [Google Scholar] [CrossRef]
- Hiremath, S.; Patra, S.K. Transmission rate prediction for Cognitive Radio using Adaptive Neural Fuzzy Inference System. In Proceedings of the 5th International Conference on Industrial and Information Systems, Mangalore, India, 29 July–1 August 2010; pp. 92–97. [Google Scholar]
- Sowmmiya, U.; Uma, G. ANFIS-based sensor fault-tolerant control for hybrid grid. IET Gener. Transm. Distrib. 2018, 12, 31–41. [Google Scholar] [CrossRef]
- Ying, L.; Pan, M. Using adaptive network based fuzzy inference system to forecast regional electricity loads. Energy Convers. Manag. 2008, 49, 205–211. [Google Scholar] [CrossRef]
- Abbas, G.; Muazzam, H.; Farooq, U.; Gu, J.; Asad, M.U. Comparative Analysis of Analog Controllers for DC-DC Buck Converter. J. Autom. Control Eng. 2015, 3. [Google Scholar] [CrossRef]





| Parameter/Component | Value |
|---|---|
| Input voltage | 12 V |
| Output voltage | 24 V |
| Transformer power | 120 W |
| Magnetizing inductance of transformer | 250 μH |
| Output filter capacitor | 200 μF |
| Load resistance | 10 Ω |
| Duty cycle | 0.5 |
| Transformer turn ratio | 0.5 |
| Switching frequency | 100 kHz |
| e | Neg. Big | Neg. Small | Zero | Pos. Small | Pos. Big | |
|---|---|---|---|---|---|---|
| Δe | ||||||
| Neg. Big | 0 | 0 | 0 | 0.25 | 0.5 | |
| Neg. Small | 0 | 0 | 0.25 | 0.5 | 0.75 | |
| Zero | 0 | 0.25 | 0.5 | 0.75 | 1 | |
| Pos. Small | 0.75 | 0.5 | 0.75 | 1 | 1 | |
| Pos. Big | 0.5 | 0.75 | 1 | 1 | 1 | |
| PID Parameters | Values |
|---|---|
| Proportional gain KP | 18.45 |
| Integral gain KI | 99,999.88 |
| Derivative gain KD | 0.00071 |
| Parameters | Unity Feedback | FLC | ANFIS | PID |
|---|---|---|---|---|
| Rise time (ms) | 1.0 | 0.8925 | 0.8827 | 0.98 |
| Settling time (ms) | NaN | 6.9 | 6.3 | 22.1 |
| Overshoot (%) | 28.1803 | 11.0875 | 0.5603 | 19.5644 |
| Undershoot (%) | 0.0022 | 0.0149 | 0.0205 | 0.3464 |
| Peak (V) | 30.7633 | 26.6610 | 24.1345 | 28.6955 |
| Peak time (ms) | 2.4 | 1.9 | 1.8 | 2.7 |
| Steady-state error (%) | 7.54 | 1.83 | 1.04 | 1.79 |
| (a) | ||
| Parameters | Step Load | |
| 10 Ω to 14 Ω | 10 Ω to 6 Ω | |
| Load regulation (%) | 0.31 | 0.65 |
| Settling time (ms) | 2.5 | 3.0 |
| (b) | ||
| Parameters | Step Line | |
| 12 V to 15 V | 12 V to 9 V | |
| Line regulation (%) | 1.67 | 1.0 |
| Settling time (ms) | 5.5–6.0 | 5.5–6.0 |
| (c) | ||
| Parameters | Reference Value Change | |
| 24 V to 28 V | 24 V to 20 V | |
| Steady-state error (%) | 0.9 | 1.05 |
| Settling time (ms) | 4.0–4.5 | 4.0–4.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahid, M.A.; Abbas, G.; Hussain, M.R.; Asad, M.U.; Farooq, U.; Gu, J.; Balas, V.E.; Uzair, M.; Awan, A.B.; Yazdan, T. Artificial Intelligence-Based Controller for DC-DC Flyback Converter. Appl. Sci. 2019, 9, 5108. https://doi.org/10.3390/app9235108
Shahid MA, Abbas G, Hussain MR, Asad MU, Farooq U, Gu J, Balas VE, Uzair M, Awan AB, Yazdan T. Artificial Intelligence-Based Controller for DC-DC Flyback Converter. Applied Sciences. 2019; 9(23):5108. https://doi.org/10.3390/app9235108
Chicago/Turabian StyleShahid, Muhammad Arslan, Ghulam Abbas, Mohammad Rashid Hussain, Muhammad Usman Asad, Umar Farooq, Jason Gu, Valentina E. Balas, Muhammad Uzair, Ahmed Bilal Awan, and Tanveer Yazdan. 2019. "Artificial Intelligence-Based Controller for DC-DC Flyback Converter" Applied Sciences 9, no. 23: 5108. https://doi.org/10.3390/app9235108
APA StyleShahid, M. A., Abbas, G., Hussain, M. R., Asad, M. U., Farooq, U., Gu, J., Balas, V. E., Uzair, M., Awan, A. B., & Yazdan, T. (2019). Artificial Intelligence-Based Controller for DC-DC Flyback Converter. Applied Sciences, 9(23), 5108. https://doi.org/10.3390/app9235108