A Flutter-Based Electromagnetic Wind Energy Harvester: Theory and Experiments

Abstract
:1. Introduction
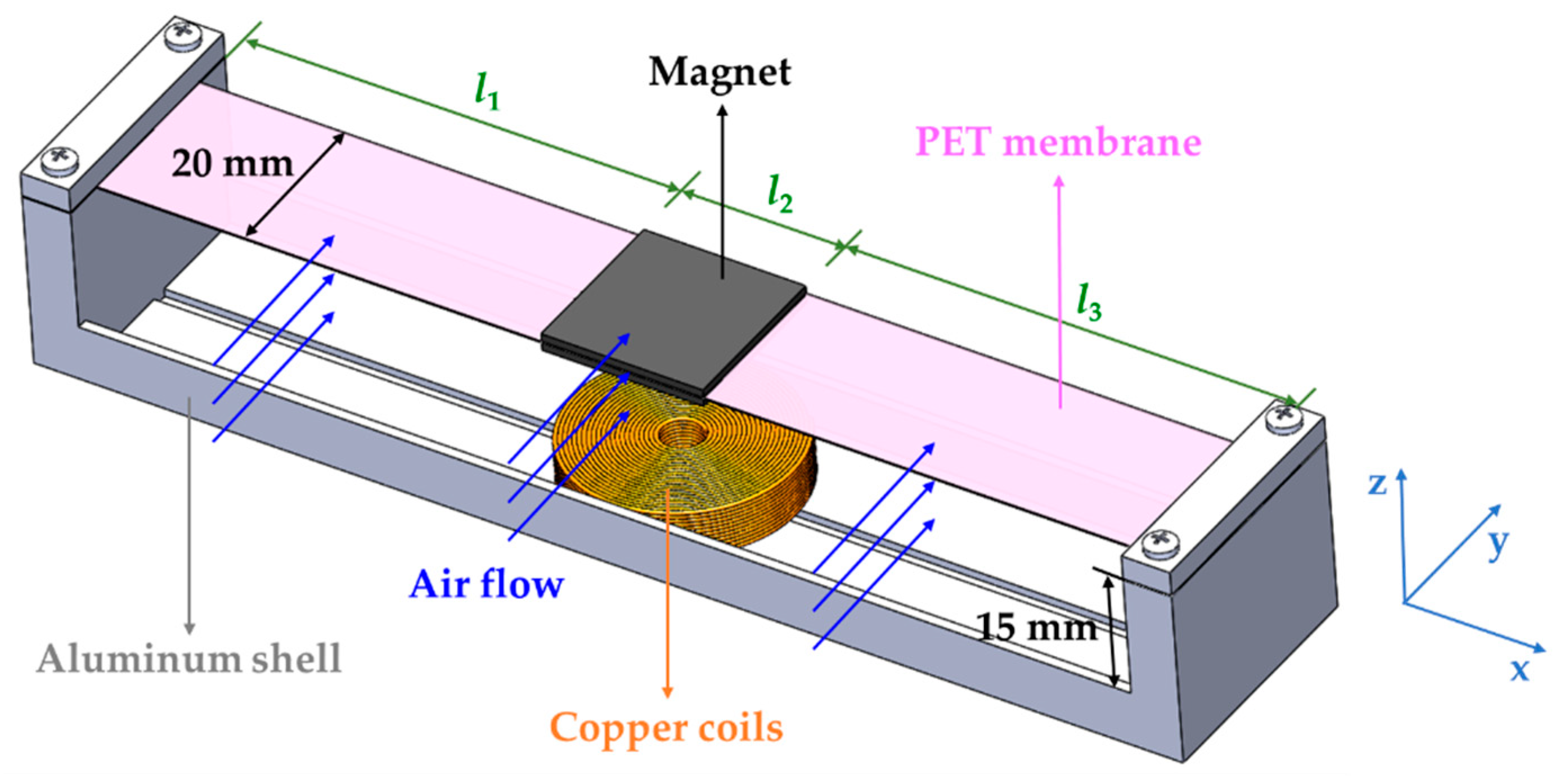
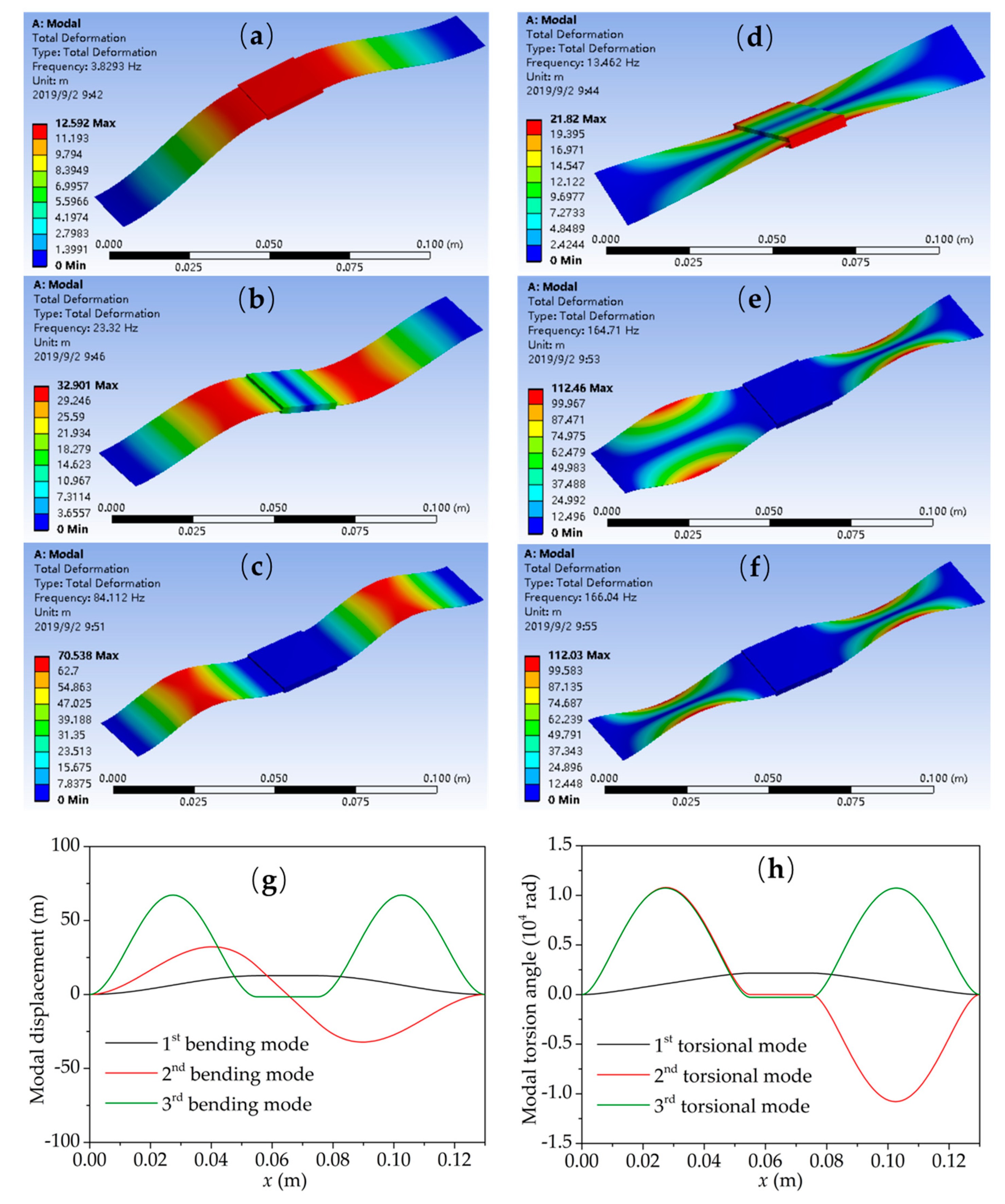
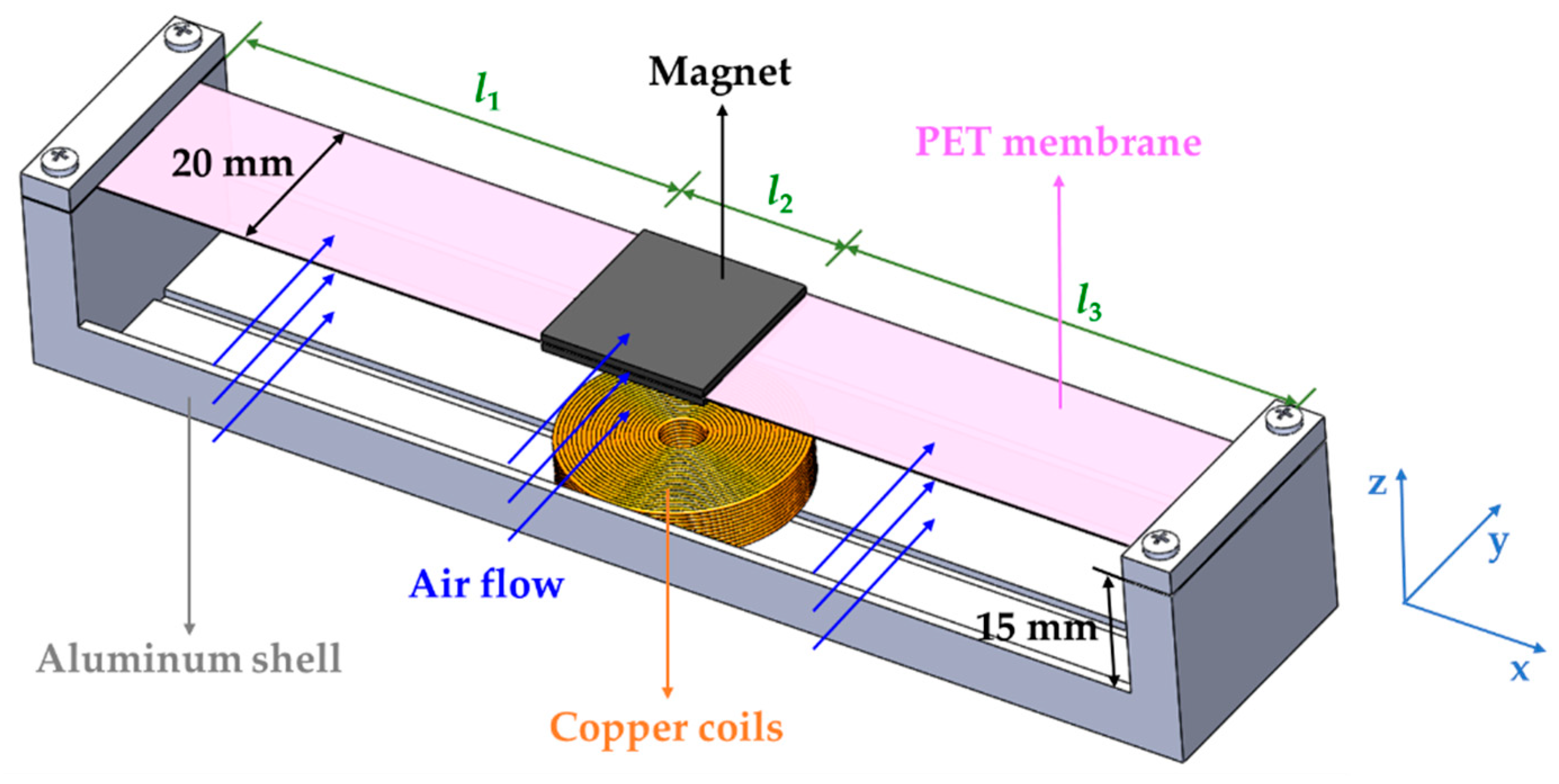
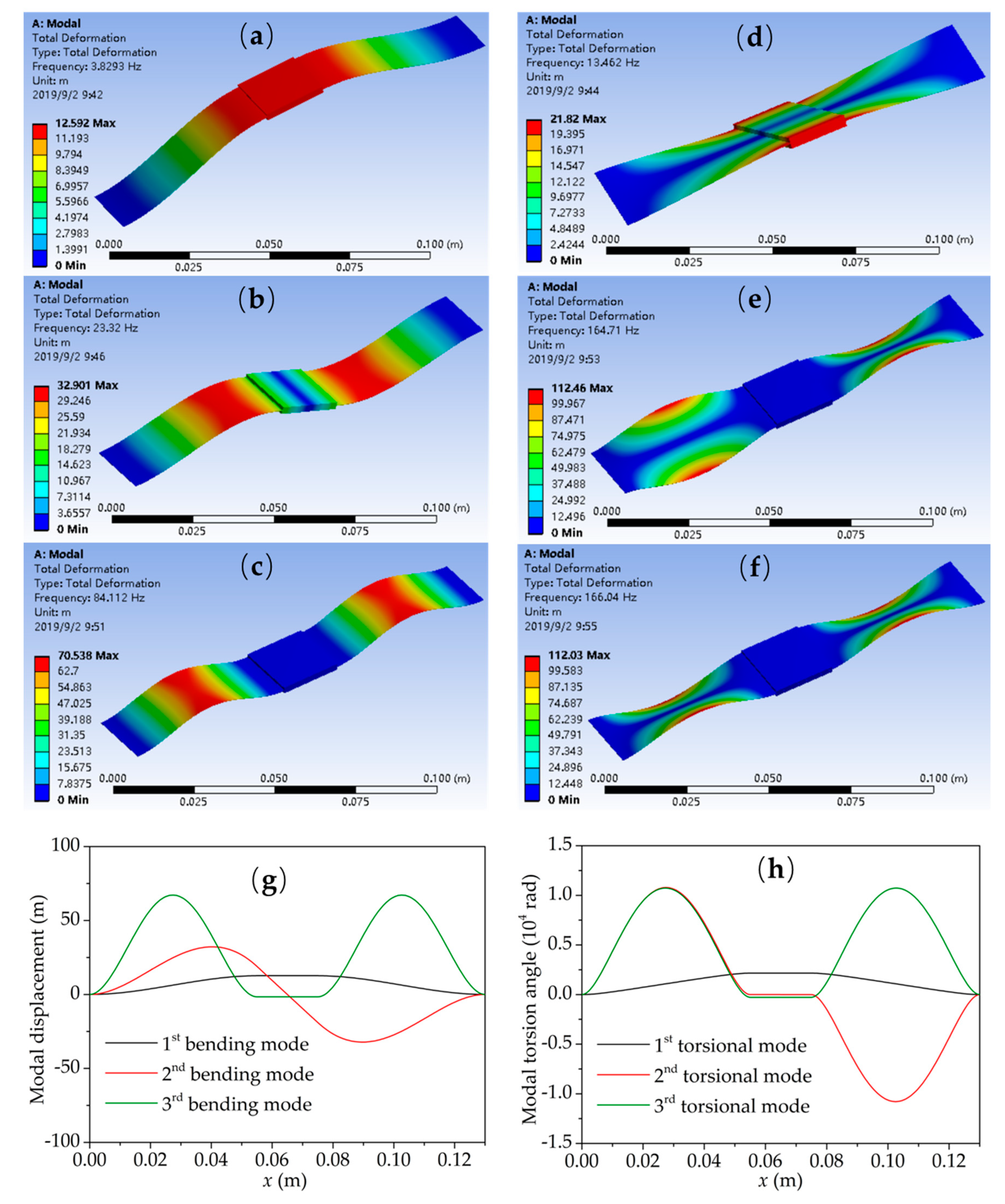
2. Device Structure and Modal Analysis
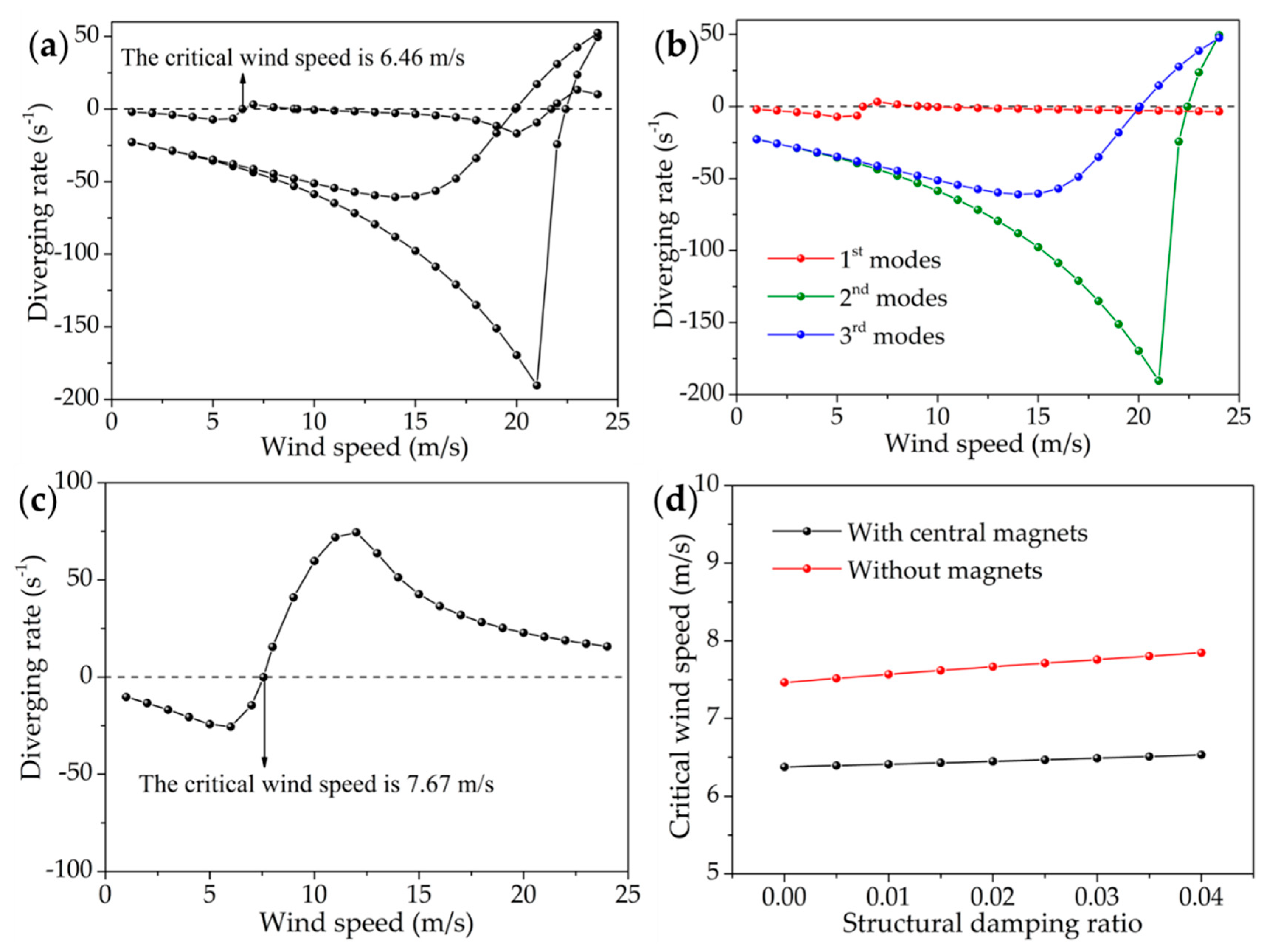
3. Flutter Analysis
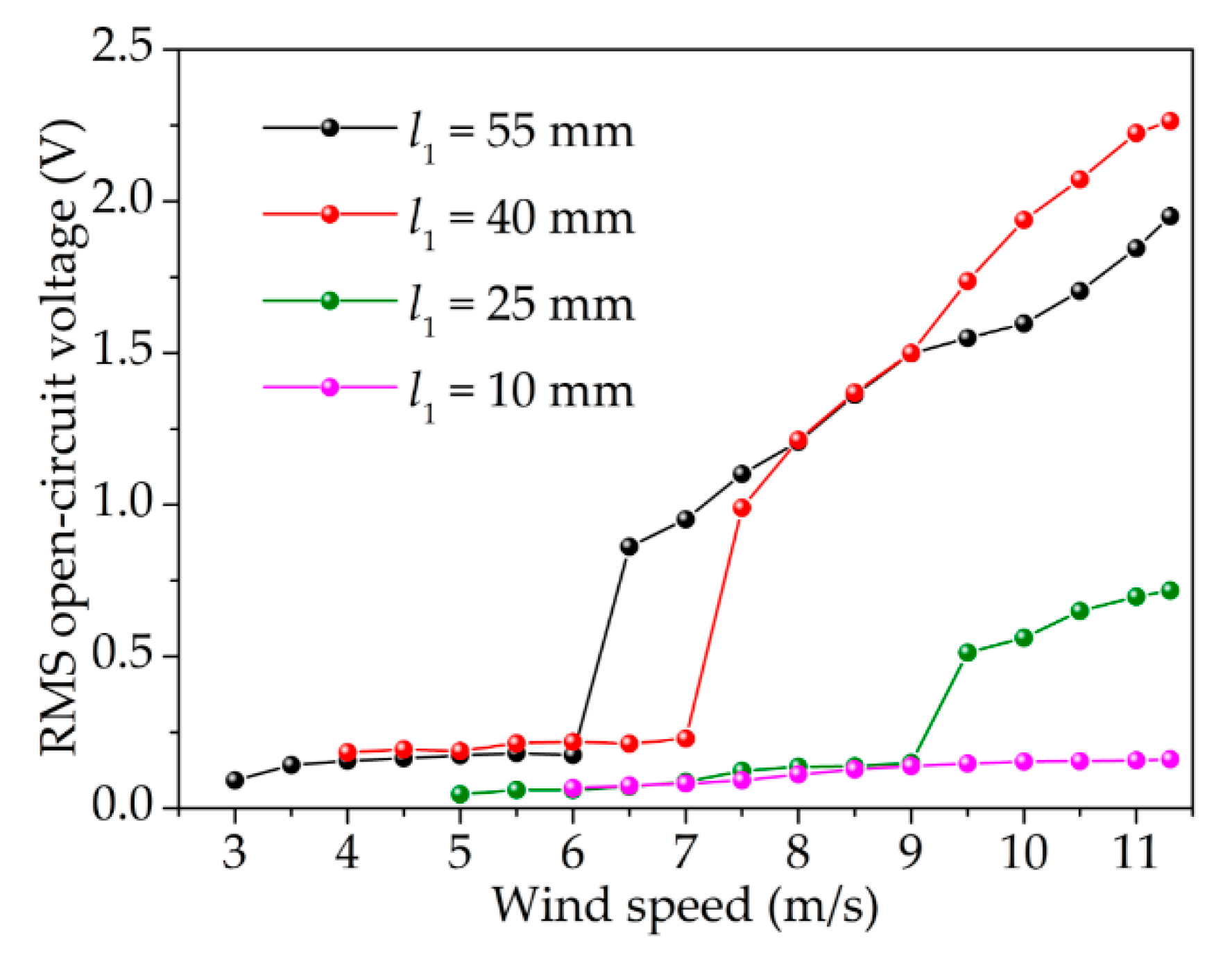
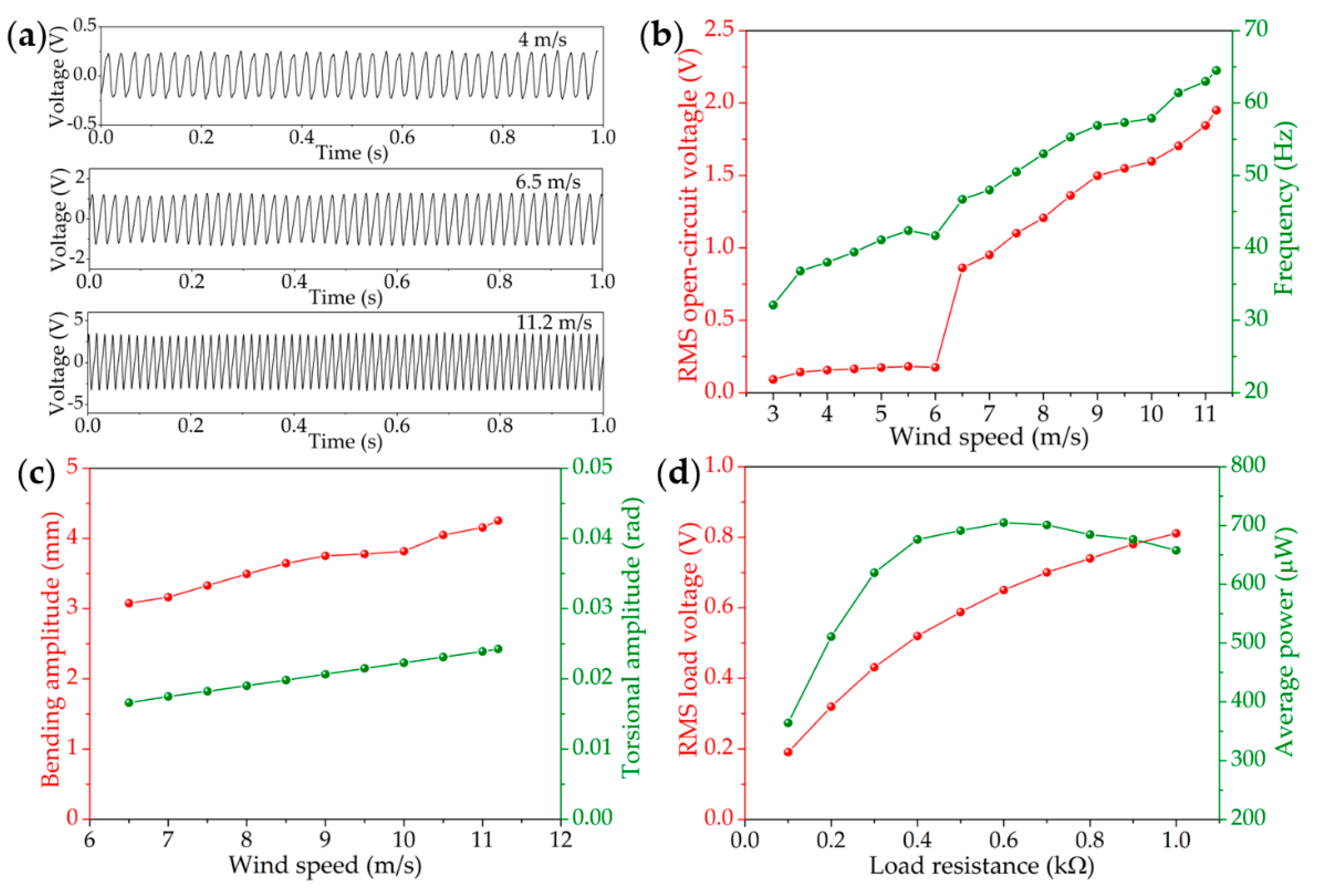
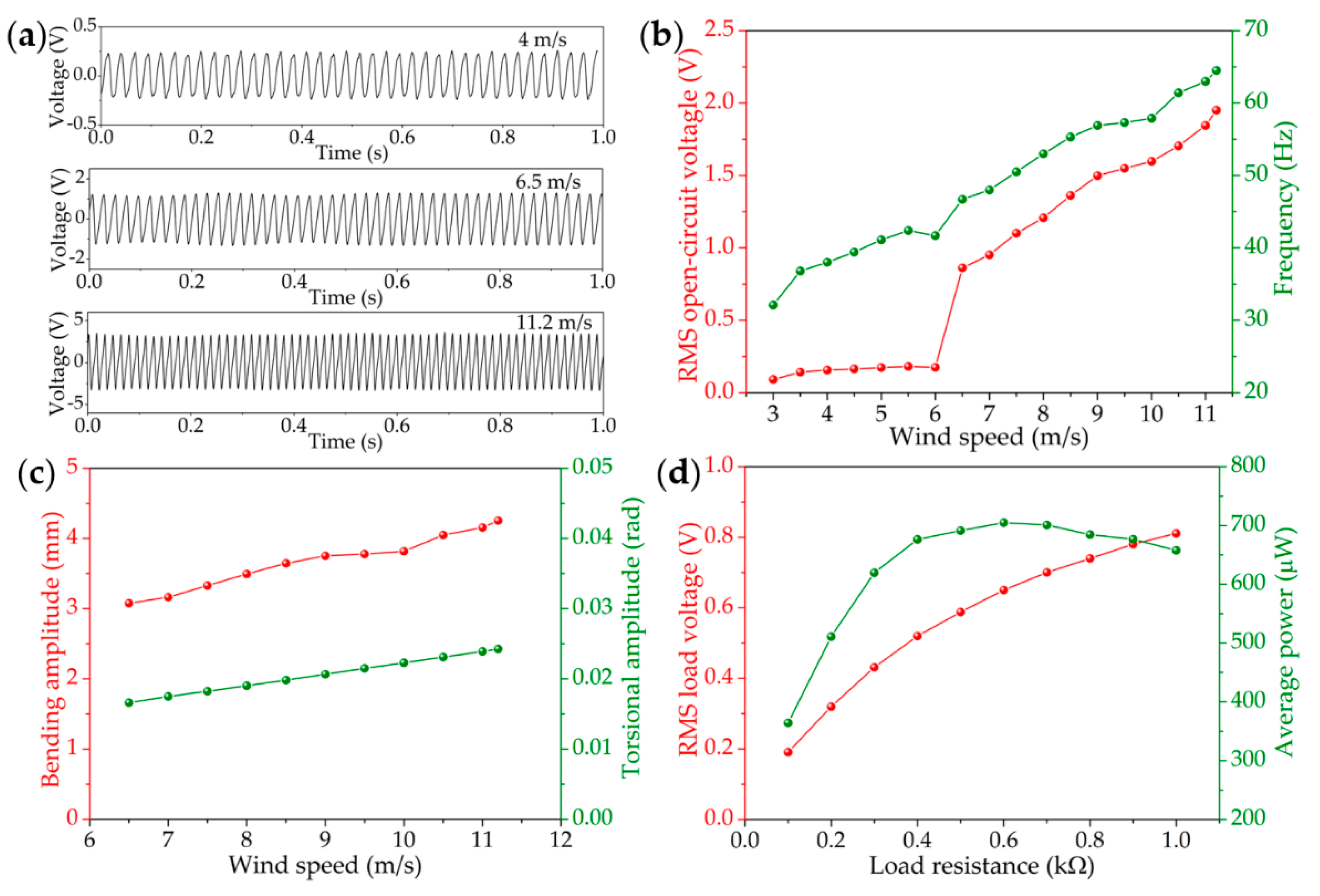
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shaikh, F.K.; Zeadally, S. Energy harvesting in wireless sensor networks: A comprehensive review. Renew. Sustain. Energy Rev. 2016, 55, 1041–1054. [Google Scholar] [CrossRef]
- Salauddin, M.; Toyabur, R.M.; Maharjan, P. High performance human-induced vibration driven hybrid energy harvester for powering portable electronics. Nano Energy 2018, 45, 236–246. [Google Scholar] [CrossRef]
- Nasiri, A.; Zabalawi, S.A.; Jeutter, D.C. A linear permanent magnet generator for powering implanted electronic devices. IEEE Trans. Power Electron. 2011, 26, 192–199. [Google Scholar] [CrossRef]
- Tan, Y.S.; Dong, Y.; Wang, X.H. Review of MEMS electromagnetic vibration energy harvester. J. Microelectromech. Syst. 2016, 26, 1–16. [Google Scholar] [CrossRef]
- Orrego, S.; Shoele, K.; Ruas, A.; Doran, K.; Cagiano, B.; Mittal, R.; Kang, S.H. Harvesting ambient wind energy with an inverted piezoelectric flag. Appl. Energy 2017, 194, 212–222. [Google Scholar] [CrossRef]
- Bogue, R. Energy harvesting: A review of recent developments. Sens. Rev. 2015, 35, 1–5. [Google Scholar] [CrossRef]
- Liu, H.C.; Zhong, J.W.; Lee, C.K.; Lee, S.W.; Lin, L.W. A comprehensive review on piezoelectric energy harvesting technology: Materials, mechanisms, and applications. Appl. Phys. Rev. 2018, 5, 041306. [Google Scholar] [CrossRef]
- Elahi, H.; Eugeni, M.; Caudenzi, P. A review on mechanisms for piezoelectric-based energy harvesters. Energies 2018, 11, 1850. [Google Scholar] [CrossRef]
- Usharani, R.; Uma, G.; Ummpathy, M.; Choi, S. A novel piezoelectric energy harvester using a multi-stepped beam with rectangular cavities. Appl. Sci. 2018, 8, 2091. [Google Scholar] [CrossRef]
- Mccarthy, J.M.; Watkins, S.; Deivasigamani, A.; John, S.J. Fluttering energy harvesters in the wind: A review. J. Sound Vib. 2016, 361, 355–377. [Google Scholar] [CrossRef]
- Hu, Y.L.; Yang, B.; Chen, X.; Wang, X.L.; Liu, J.Q. Modeling and experimental study of a piezoelectric energy harvester from vortex shedding-induced vibration. Energy Convers. Manag. 2018, 162, 145–158. [Google Scholar] [CrossRef]
- Kumar, S.K.; Bose, C.; Ali, S.F.; Sarkar, S.; Gupta, S. Investigations on a vortex induced vibration based energy harvester. Appl. Phys. Lett. 2017, 111, 243903. [Google Scholar] [CrossRef]
- Dai, H.L.; Abdelkefi, A.; Yang, Y.; Wang, L. Orientation of bluff body for designing efficient energy harvesters from vortex induced vibrations. Appl. Phys. Lett. 2016, 108, 053902. [Google Scholar] [CrossRef]
- Ewere, F.; Wang, G. Performance of galloping piezoelectric energy harvesters. J. Intell. Mater. Syst. Struct. 2014, 25, 1693–1704. [Google Scholar] [CrossRef]
- Hemon, P.; Amandolese, X.; Andrianne, T. Energy harvesting from galloping of prisms: A wind tunnel experiment. J. Fluids Struct. 2017, 70, 390–402. [Google Scholar] [CrossRef]
- Li, X.T.; Lyu, Z.; Kou, J.Q.; Zhang, W.W. Mode competition in galloping of a square cylinder at low Reynolds number. J. Fluid Mech. 2019, 867, 516–555. [Google Scholar] [CrossRef]
- Chen, Y.; Mu, X.J.; Wang, T.; Ren, W.W.; Yang, Y.; Wang, Z.L.; Sun, C.L.; Gu, A.Y.D. Flutter Phenomenon in Flow Driven Energy Harvester—A Unified Theoretical Model for “Stiff” and “Flexible” Materials. Sci. Rep. 2016, 6, 35180. [Google Scholar] [CrossRef] [PubMed]
- Bao, C.Y.; Dai, Y.T.; Wang, P.; Tang, G.J. A piezoelectric energy harvesting scheme based on stall flutter of airfoil section. Eur. J. Mech. B Fluids 2019, 75, 119–132. [Google Scholar] [CrossRef]
- He, X.F.; Yang, X.K.; Jiang, S.L. Enhancement of wind energy harvesting by interaction between vortex-induced vibration and galloping. Appl. Phys. Lett. 2018, 112, 033901. [Google Scholar] [CrossRef]
- Li, S.G.; Lipson, H. Vertical-stalk flapping-leaf generator for wind energy harvesting. In Proceedings of the Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Oxnard, CA, USA, 20–24 September 2009; 2, pp. 611–619. [Google Scholar] [CrossRef]
- Available online: http://www.humdingerwind.com (accessed on 27 June 2019).
- Frayne, S.M. Fluid-Induced Energy Converter with Curved Parts. U.S. Patent 20080297119A1, 4 December 2008. [Google Scholar]
- Frayne, S.M. Generator Utilizing Fluid-Induced Oscillations. U.S. Patent 7,573,143, 11 August 2009. [Google Scholar]
- Fei, F.; Mai, J.D.; Li, W.J. A wind-flutter energy converter for powering wireless sensors. Sens. Actuators A Phys. 2012, 173, 163–171. [Google Scholar] [CrossRef]
- Quy, V.D.; Sy, N.V.; Hung, D.T.; Huy, V.Q. Wind tunnel and initial field tests of a micro generator powered by fluid-induced flutter. Energy Sustain. Dev. 2016, 33, 75–83. [Google Scholar]
- Aquino, A.I.; Calautit, J.K.; Hughes, B.R. A Study on the Wind-Induced Flutter Energy Harvester (WIFEH) Integration into Buildings. Energy Procedia 2017, 142, 321–327. [Google Scholar] [CrossRef]
- Aquino, A.I.; Calautit, J.K.; Hughes, B.R. Integration of aero-elastic belt into the built environment for low-energy wind harnessing: Current status and a case study. Energy Convers. Manag. 2017, 149, 830–850. [Google Scholar] [CrossRef]
- Pan, C.T.; Liu, Z.H.; Chen, Y.C.; Liu, C.F. Design and fabrication of flexible piezo-microgenerator by depositing ZnO thin films on PET substrates. Sens. Actuators A Phys. 2010, 159, 96–104. [Google Scholar] [CrossRef]
- Pan, C.T.; Liu, Z.H.; Chen, Y.C. Study of broad bandwidth vibrational energy harvesting system with optimum thickness of PET substrate. Curr. Appl. Phys. 2012, 12, 684–696. [Google Scholar] [CrossRef]
- Foong, F.M.; Thein, C.K.; Ooi, B.L.; Yurchenko, D. Increased power output of an electromagnetic vibration energy harvester through anti-phase resonance. Mech. Syst. Signal Process. 2019, 116, 129–145. [Google Scholar] [CrossRef]
- He, X.M.; Wen, Q.; Lu, Z. A micro-electromechanical systems based vibration energy harvester with aluminum nitride piezoelectric thin film deposited by pulsed direct-current magnetron sputtering. Appl. Energy 2018, 228, 881–890. [Google Scholar] [CrossRef]
- Theodorsen, T. General theory of aerodynamic instability and the mechanism of flutter. NACA Tech. Rep. 1935, 496, 1–23. [Google Scholar]
- Fung, Y.C. A Introduction to Theory of Aeroelasticity; Dover Publications: New York, NY, USA, 1993; pp. 214–215. [Google Scholar]
- Van der Put, M. Rigidity of Structures Against Aerodynamic Forces; IABSE: Zurich, Switzerland, 1976. [Google Scholar]
- Selberg, A.; Hjort-Hansen, E. The fate of flat plate aerodynamics in the world of bridge decks. In Proceedings of the Theodorsen Colloquium, Trondheim, Norway, 1976; pp. 101–113. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| Ep | Young’s modulus of PET membrane | 2.4 GPa [28,29] |
| ρp | Density of PET membrane | 1400 kg/m3 [28,29] |
| νp | Poisson’s ratio of PET membrane | 0.36 [28,29] |
| l × 2b × tp | Dimension of PET membrane | 130 mm × 20 mm × 0.18 mm |
| Em | Young’s modulus of magnet | 160 GPa |
| ρm | Density of magnet | 7500 kg/m3 |
| νm | Poisson’s ratio of magnet | 0.3 |
| l2 × 2b × tm | Dimension of magnet | 20 mm × 20 mm × 1 mm |
| Φ1 × Φ2 × h | Inner diameter, external diameter, and thickness of coils | 3 mm × 27 mm × 6 mm |
| N | Turns of coils | 5310 |
| Rc | Resistance of coils | 580 Ω |
| d0 | Gap between magnets and coils | 14 mm |
| Natural Frequency (Hz) | Bending Mode | Torsional Mode | ||||
|---|---|---|---|---|---|---|
| 1st Mode | 2nd Mode | 3rd Mode | 1st Mode | 2nd Mode | 3rd Mode | |
| ANSYS FEM | 3.83 | 23.32 | 84.11 | 13.46 | 164.71 | 166.04 |
| Analytical model | 3.71 | 22.77 | 80.71 | 13.54 | 162.50 | 163.83 |
| Error (%) | 3.13 | 2.36 | 4.04 | 0.59 | 1.34 | 1.33 |
| Equations | Van der Put | Selberg | This Work |
|---|---|---|---|
| Critical wind speed (m/s) | 8.60 | 7.43 | 7.67 |
| Magnets Locations | l1 = 55 mm | l1 = 40 mm | l1 = 25 mm | l1 = 10 mm |
|---|---|---|---|---|
| Critical wind speed (m/s) | 6.46 | 7.31 | 9.94 | 10.13 |
| Critical Wind Speed (m/s) | l1 = 55 mm | l1 = 40 mm | l1 = 25 mm |
|---|---|---|---|
| Analytical model | 6.46 | 7.31 | 9.94 |
| Experimental results | 6.5 | 7.5 | 9.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Z.; Wen, Q.; He, X.; Wen, Z. A Flutter-Based Electromagnetic Wind Energy Harvester: Theory and Experiments. Appl. Sci. 2019, 9, 4823. https://doi.org/10.3390/app9224823
Lu Z, Wen Q, He X, Wen Z. A Flutter-Based Electromagnetic Wind Energy Harvester: Theory and Experiments. Applied Sciences. 2019; 9(22):4823. https://doi.org/10.3390/app9224823
Chicago/Turabian StyleLu, Zhuang, Quan Wen, Xianming He, and Zhiyu Wen. 2019. "A Flutter-Based Electromagnetic Wind Energy Harvester: Theory and Experiments" Applied Sciences 9, no. 22: 4823. https://doi.org/10.3390/app9224823
APA StyleLu, Z., Wen, Q., He, X., & Wen, Z. (2019). A Flutter-Based Electromagnetic Wind Energy Harvester: Theory and Experiments. Applied Sciences, 9(22), 4823. https://doi.org/10.3390/app9224823