1. Introduction
With the warming of the Earth’s surface and the gradually opening of the Arctic passages [
1], marine transportation has become much more important than before. Since the natural environment is complex and harsh in some sea areas, an objective assessment of the environmental risks of crossing the marine areas is needed urgently. The main factors that affect the navigation risk are sea wave, sea ice, visibility (Vis), icing, wind, and turbulence, as well as precipitation [
2,
3]. Information on Vis and freezing precipitation over marine environments are usually limited and not easy to be predicted or monitored over various scales [
3,
4]. For this reason, having gridded data of Vis with high quality is a precondition to assess the navigation risk in marine environments. At the same time, Vis has an important influence on aviation, especially on the take-off and landing for pilots. Due to that, Vis is a direct reflection of air quality; the gridded Vis data could help people know more about the air quality around the world and monitor and predict the air quality.
The statistical data on marine accidents [
5] showed that 220 maritime accidents occurred in the southern waters of the Taiwan Strait from 2000 to 2007, including 122 collisions, accounting for 55.45% of the total number of maritime accidents (68 collisions) that occurred during poor visibility conditions. At the same time, in China, 31% of the total number of aviation accidents were caused by adverse weather. Even in the United States, where aviation technology is advanced, weather-related air crashes account for up to one-third of all fatalities [
6]. Therefore, in aeronautical meteorology, people have always attached great importance to the relationship between Vis and aviation. These suggest that under the Arctic environments, these numbers can easily go beyond what is given here because of the lack of observations near coastal areas and open marine environments. In fact, because of the lack of observations, including ones from satellites over Arctic regions, and limited precipitation radars available on the large ships (not on small ones), fog radars (e.g., W-band radars) are needed to monitor fog conditions that are not usually available. Accurate nowcasting and forecasting of Vis is needed more than using only monitoring of the ship maneuvers and their motion. This is in a way similar to aviation applications [
7]. The only way to predict fog currently in the Arctic is use numerical weather prediction (NWP) models, but their physical algorithms are usually not developed for fog predictions [
8].
Vis is the greatest horizontal distance at which it is possible to observe and identify particular objects, and fog is defined when Vis <1 km. For Vis evaluation, any particle type in the atmosphere can play an important role and needs to be considered in the analysis [
7]. Currently, Vis data are available from in-situ and remote sensing platforms, as well as from NWP simulations in a limited way. In in-situ observation for Vis, the atmospheric extinction coefficient is usually measured firstly based on an instrument. Then, the Vis value is calculated based on the Koschmieder equation, which defines visibility mathematically. Many methods have been proposed for remote sensing observations on Vis. The most often used methods to obtain Vis data based on satellite remote sensing is to obtain the planet reflectivity at various bands firstly, and then calculate the Vis data based on the built relationship between Vis and planet reflectivity. In recent years, one way to calculate Vis based on satellite-based aerosol products has been proposed, which has been tested on the East Coast of the United States [
9]. However, Vis from satellite observations cannot be used accurately during the daytime when mid or high-level clouds exist [
8,
10,
11]. At the same time, Vis data from the NWPs is limited because of the high uncertainty in the Vis microphysical parameterization based on using only liquid water content (LWC) [
10,
12], where droplet number concentration (Nd) is assumed to be a negligible factor. In addition, because of the limited number of observations from buoys and ships, the reliable Vis data over marine environments can be highly uncertain; therefore, both the monitoring and forecasting of Vis need to be improved significantly.
Many earlier studies have tried to obtain Vis data over gridded surfaces using observations and NWP models. For example, Fei et al. [
13] retrieved Vis based on principal component regression (PCR) and NOAA/AVHRR remote sensing data. They found that the correlation coefficient between the retrieved Vis and measured Vis was 0.82, but the method could not accurately obtain high or low Vis, and the average relative error was at 21.4%. A new microphysical parameterization for fog Vis (MPF) method using RH (relative humidity), LWC, and Nd parameters was developed by Gultepe et al. [
10]. They stated that when the RH is close to 100%, the MPF should be used in NWP simulations. This new method significantly improves the prediction of Vis obtained from the operational forecast models. Uncertainty in the new Vis parameterization is found to be less than 29% compared to more than 50% based on only LWC-based parameterization. Their work improved NWP predictions of Vis significantly, but further studies are still needed for high-resolution prediction models. Kessner et al. [
9] studied the relationship between Vis and satellite-based aerosol products such as optical thickness (aerosol optical depth, or AOD), and presented their results for atmospheric attenuation coefficients over the globe.
The fog prediction of Vis in marine environments using NWP models includes large uncertainties on small space scales over the short time periods, because the microphysical schemes used in numerical models [
4] have limited boundary layer processes such as turbulence. To achieve more stable and reliable historical gridded Vis data around the world’s marine environments, remote sensing retrievals of aerosol and cloud optical thickness together with meteorological parameters are needed. There have been many earlier studies revealing the relationships between atmospheric Vis and meteorological elements. For example, Hong [
14] studied the various environmental factors affecting atmospheric Vis in the region of Chongqing, China, and their results showed that atmospheric Vis changes seasonally and also as a function of horizontal wind speed (Uh), RH, and rainfall. Founda et al. [
15] explored the interdecadal variability and trends of surface horizontal Vis in the urban areas of Athens. Their results showed that Vis was negatively correlated with RH. The correlation was stronger in the early part of the time series, and decreased over the years. In contrast, a positive correlation between Vis and wind speed was found. At the same time, the relationship between AOD and Vis in Athens was also examined in the study, and their negative correlation was confirmed. Founda et al. also studied the air quality of Athens by studying the Vis in the area. Singh et al. [
16] investigated the long-term trends in Vis for eight meteorological stations situated in the UK. In general, Vis has improved at most of the stations through time, which are attributed to reductions in aerosol particle loadings and decreases in RH. At the same time, variations of a few percentage points in this RH range can have significant effects on Vis. Their study also showed that Uh and wind direction were both important factors influencing Vis. Gultepe et al. [
7] summarized all the meteorological factors that affect Vis severely.
Since precipitation and fog both have a great effect on Vis, meteorological processes affecting precipitation and sea fog should also be considered in the analysis when inferring Vis from remote sensing platforms and NWP model simulations. Zhao et al. [
17] studied the relationship between pressure field and rainfall, and stated that the pressure field was significantly correlated with weather systems producing rain. This is likely due to a short-wave trough with large temperature gradients. Low fog visibilities over the ocean are also found to be strongly related to differences between sea surface temperature (Ts) and air temperature (Ta). Qu et al. [
18] also studied the formation of sea fog in the Bohai Sea, and emphasized that the temperature difference between ocean surface and air temperature (Ts-Ta) (TDsa) played an important role on the formation of sea fog type and occurrence. These works suggest that meteorological parameters such as LWC, Nd, RH, Uh, Ta, Ts, and pressure should be considered in Vis calculations [
7], where LWC is defined as the quality of liquid water in a unit volume of air, Nd is defined as number of droplets in a unit volume of air, and RH is defined as the ratio of absolute humidity in the air to the saturated absolute humidity at the same temperature and pressure.
Considering that a relationship between Vis and both atmospheric optical thickness and meteorological parameters exists, a non-linear fitting method can be used to obtain a relationship between Vis and other parameters. The artificial neural network (ANN) method used in the analysis here utilized the satellite-based aerosol/cloud products plus reanalyzed data from the European Centre for Medium-Range Weather Forecasts (ECMWF) to infer gridded Vis, and generated Vis over the Indian Ocean to test the accuracy of the model.
Overall, the main objective of this work, using in situ and remote sensing observations and reanalysis data, is to generate an accurate and reliable gridded horizontal Vis data set that in the past around the world was used for mainly marine environments based on an ANN analysis.
Section 2 provides info on the data and ANN model description.
Section 3 provides the results and discussion. Then,
Section 4 provides the conclusions.
2. Data and ANN Model
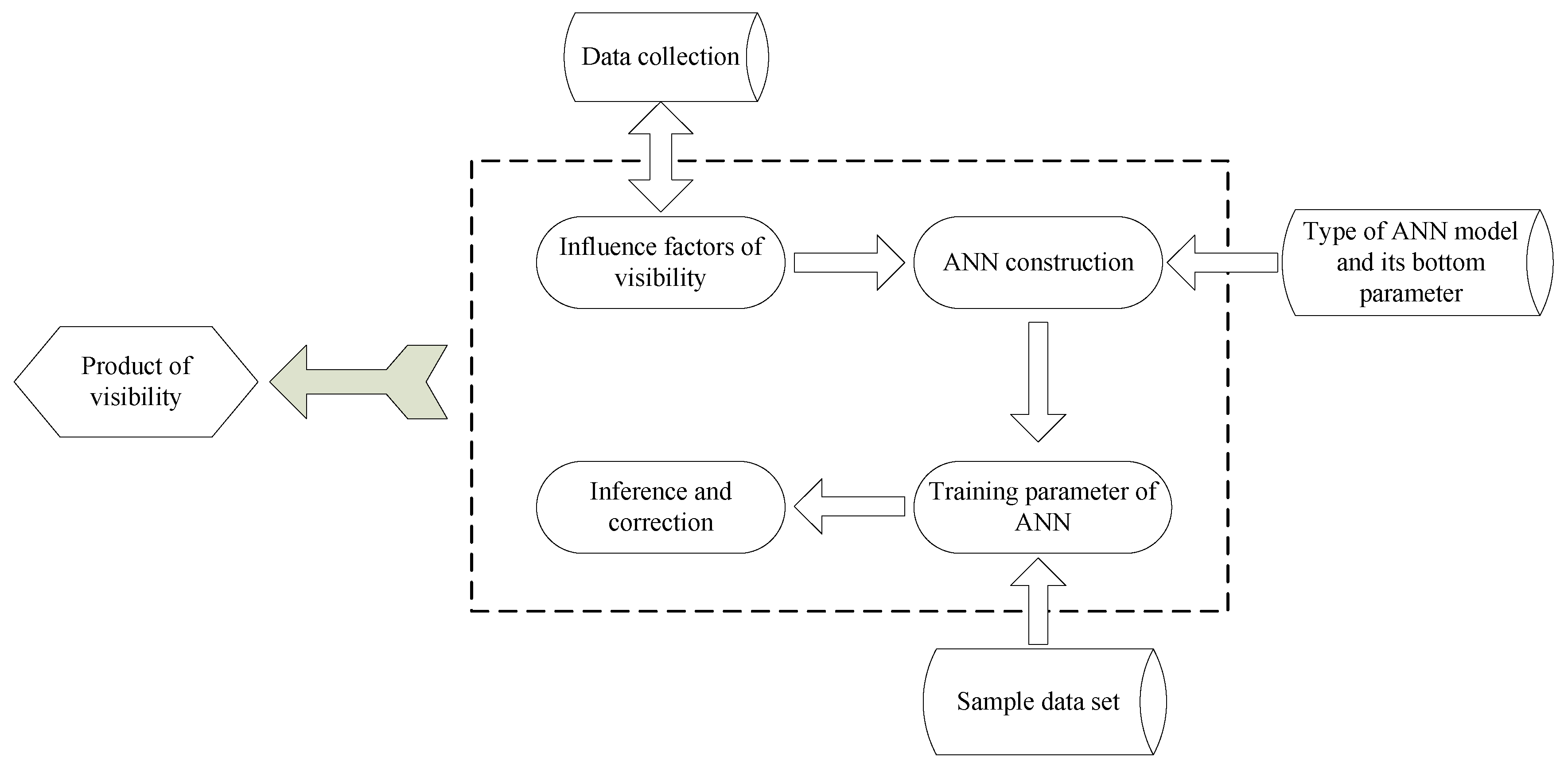
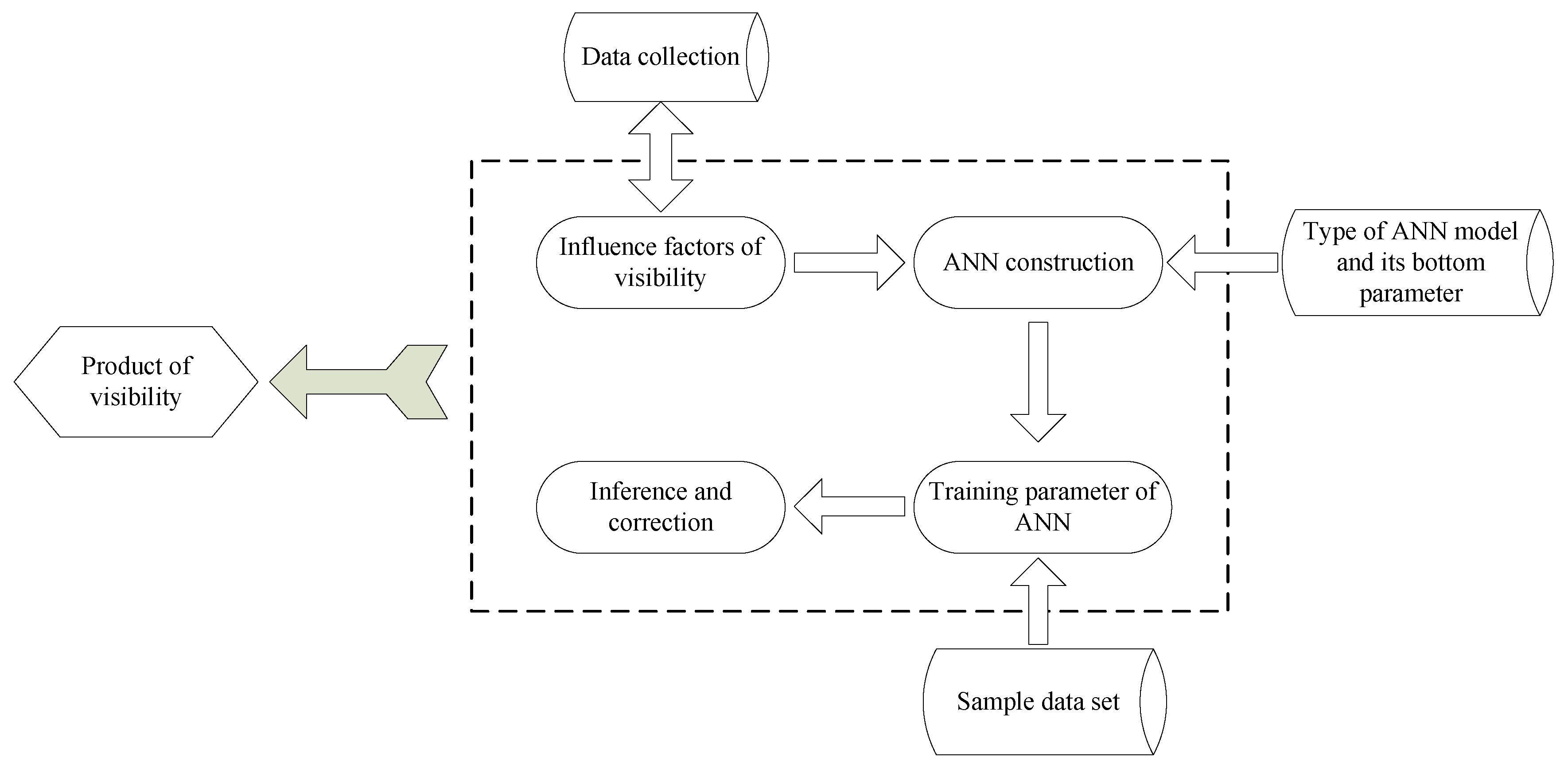
In data processing, Vis changes related to meteorological parameters are studied first (
Section 1), and then relationships are set up using ANN. After finding out which meteorological factors affect Vis, the factors are elected to be used in the training of ANN to infer Vis. During this training, we eliminated insignificant meteorological parameters by making its weight influencing Vis small. Note that Vis here represents not only that for fog and precipitation, but also that for aerosols. Then, the ANN model is built on the selected factors, and the ANN model is trained with measured Vis and met parameters data, as well as with AOD. During analysis, Vis representing fog and precipitation was inferred using reanalysis gridded data from ECMWF and AOD from the MODIS (Moderate Resolution Imaging Spectrometer) satellite. Vis for both precipitation and fog was inferred using only reanalysis gridded data from ECMWF if satellite-based AOD was unavailable when the clouds were thick enough above the boundary layer. In the final step, inferred Vis was then corrected using measurements. The technical flowchart to infer gridded Vis is given in
Figure 1.
2.1. Data
In the analysis, AOD, SLP (sea level pressure), Ta at the 10 m, RH, Ts, TDsa, and Uh are considered important parameters affecting Vis. These parameters affecting Vis as a physical/optical process are shown as follows:
AOD: AOD is defined as the integration of extinction coefficients in the vertical direction, which describes the reduction effect of aerosols for light.
SLP: SLP has an important effect on precipitation, and precipitation has a great effect on Vis.
Ta: Ta has an important influence on the particle size distribution and gas–solid distribution of air pollutants. The higher the temperature near the surface, the stronger the convection, the lower the concentration of pollutants, and the better the Vis
RH: RH is not only closely related to precipitation, but also affects the concentration of aerosol chemical components, which is closely related to the scattering coefficient of particulate matter.
Ts and TDsa: On the one hand, the higher Ts could cause the stronger convection near the surface, which lead the lower concentration of pollutants and the better Vis. On the other hand, Ts and TDsa are closely related to the occurrence of sea fog [
18].
Uh: Uh cannot only dilute atmospheric pollutants, but also change atmospheric stability and has a greater impact on Vis. Usually, a greater Uh could cause better Vis.
The data of meteorological parameters used to train ANN are taken from the International Comprehensive Ocean-Atmosphere Data Set (ICOADS), which is the largest collection of ocean surface observational data sets covering the period from 1784 to the present, including the data of the ships, buoys, and coastal sites from all parts of the world. Data of AOD are taken from MODIS Level 3 gridded atmosphere daily global joint product at a spatial resolution of 1° × 1°, and that includes all aerosol types [
9]. The data of gridded meteorological parameters are used to infer the historical gridded Vis data obtained from ECMWF model runs, and tropical cyclone data that were used to further test the accuracy of inferred Vis were obtained from the Joint Typhoon Warning Centre (JTWC).
Due to the inconsistent position of AOD data and ICOADS data in the areas studied, it was necessary to interpolate ICOADS and AOD data to the same position using a statistical method. Then, we were able to get the complete sample data set to train the ANN model. The statistical method used to govern this extrapolation in the study is the Inverse Distance Weighting Method [
19], which assumed that AOD at the position of ICOADS data could be influenced by the AODs within a radius of R km. If there are Q numbers of locations in which AOD data are located within an R-km radius near the position of ICOADS data, then the AOD at the position of ICOADS data can be defined as:
where
is the AOD value at the Kth location,
is the weight of the AOD value at the Kth location influencing the AOD at the position of the ICOADS data.
can be defined as:
where
is the distance between the location
k and the position of the ICOADS data located.
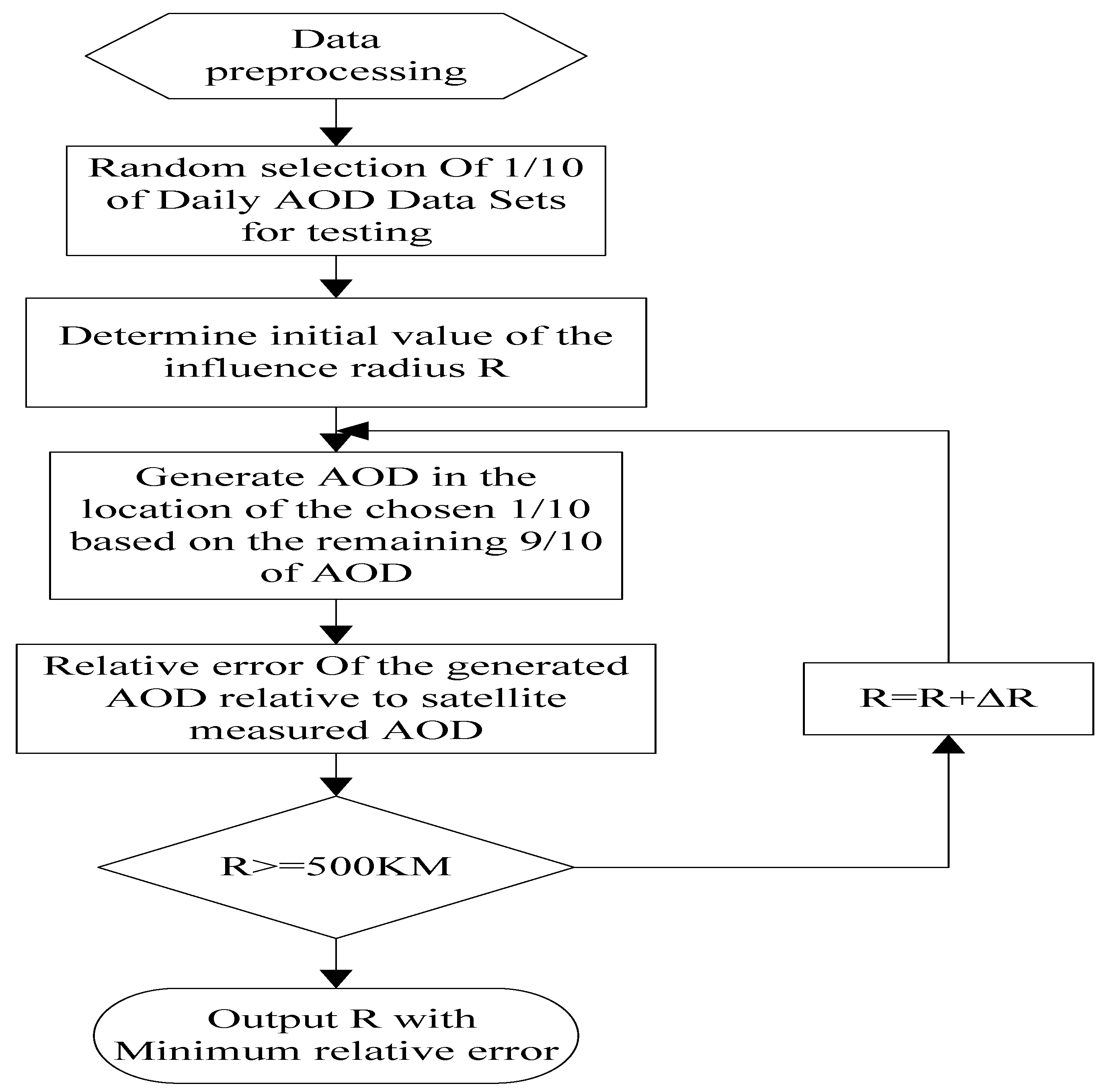
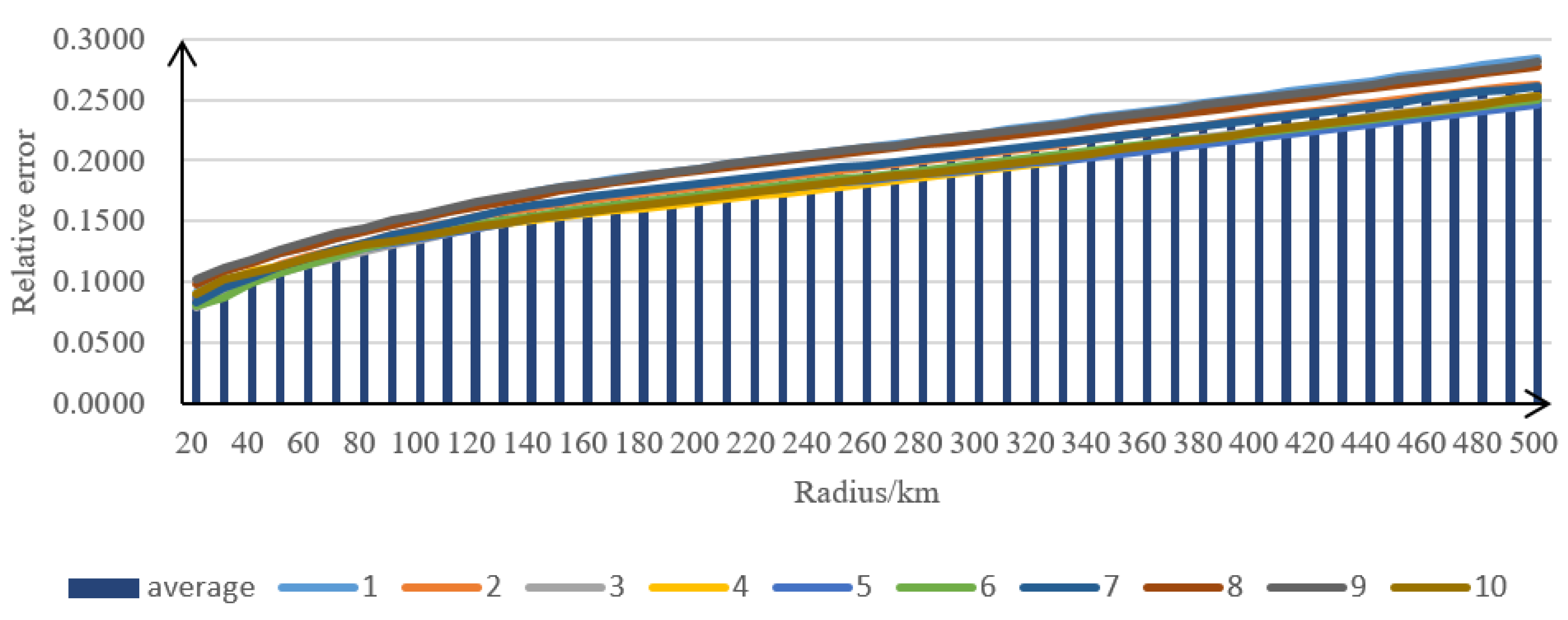
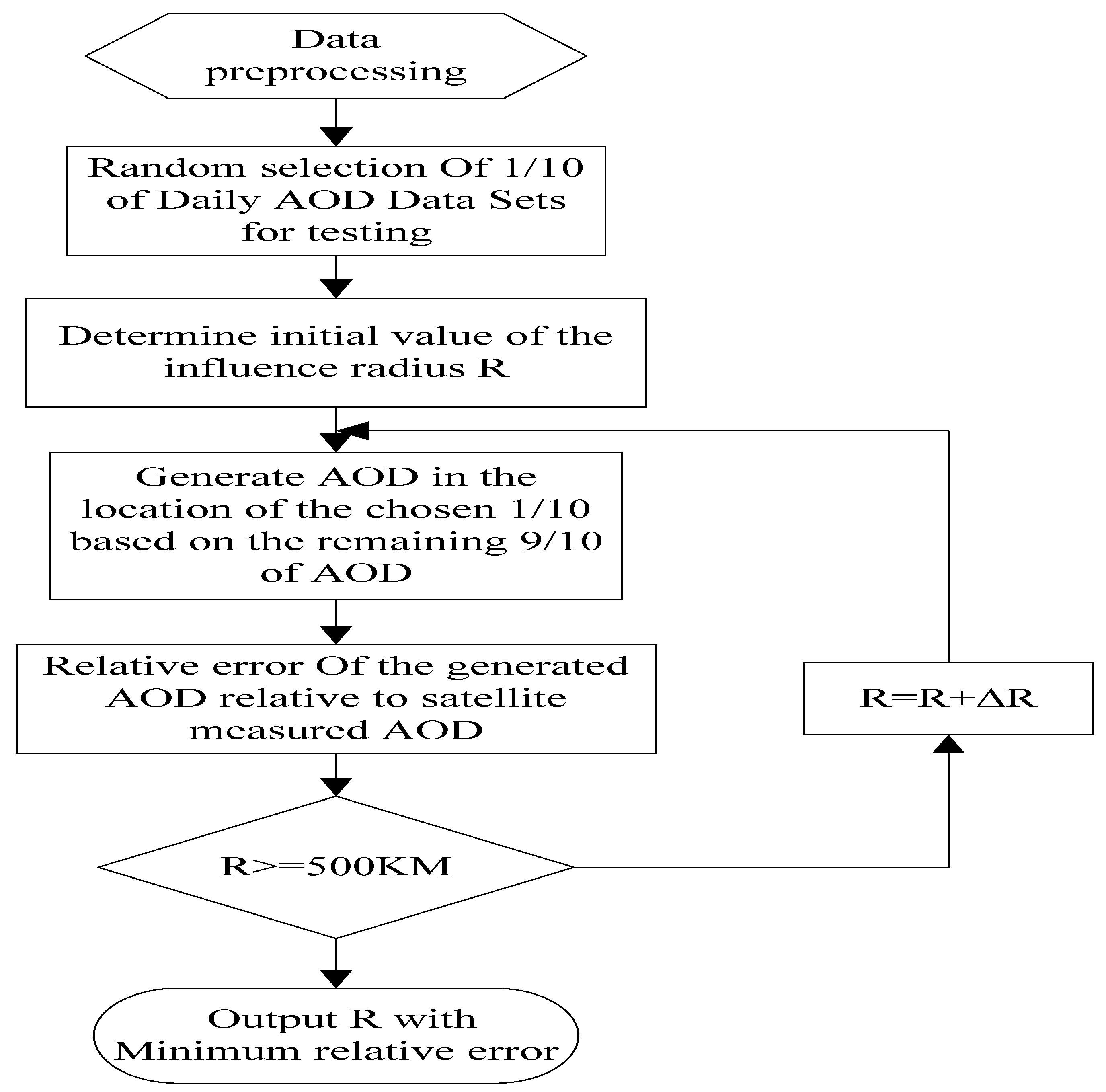
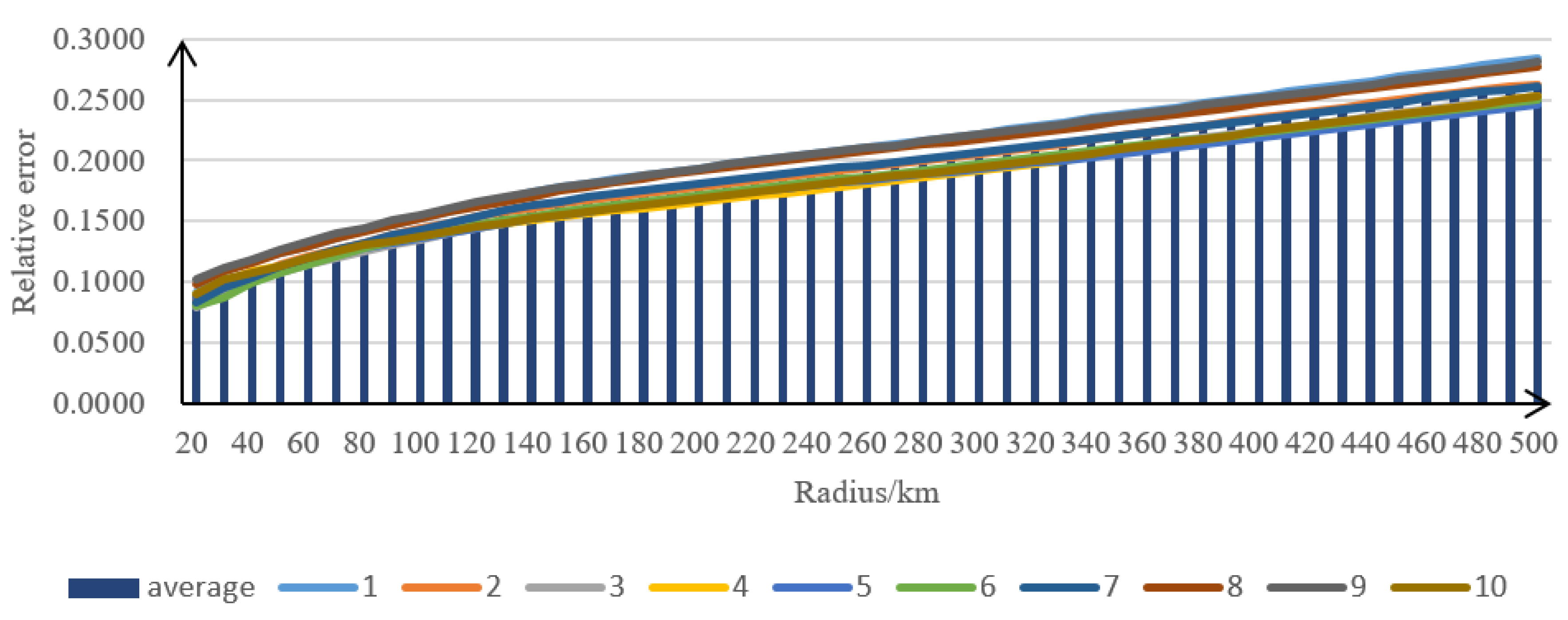
Since the radius R is closely related to the AOD at the position of ICOADS data located, it is necessary to find the R values making the generated AOD have an optimum value relative to the measured AOD. To do this, we first randomly selected 10% of the data set to test the accuracy of the generated AOD, and the remaining 90% were used to generate the AOD in the location of the randomly selected data. The initial radius was set to 20 km, the radius difference between two iterations was set to 10 km, and then, the mean relative errors of the generated AOD with different R values were calculated. Using AOD data from 1 January 2010, we studied the variation of relative error with R and an upper limit of the radius was set up as 500 km. Note that the AOD used to find R was from a MODIS level 2 product, which has a spatial resolution of 10 × 10 km. Note that MODIS level 2 products have a higher spatial resolution than level 3 products, and that can help to better study the effect of interpolation changing with R. The flowchart to find the best R is given (
Figure 2), and the code for this is shown in the
supplementary documents.
2.2. ANN Model
Artificial neural networks have been studied since the 1940s, and have been widely applied in the military, medical science, and broader economy, etc. This study employs a BP (back propagation) network to infer Vis data, which was first proposed by Rumelhart and McClelland in 1986 [
20]. The BP network is one of the classical artificial neural networks, and can simulate any non-linear input–output relationship.
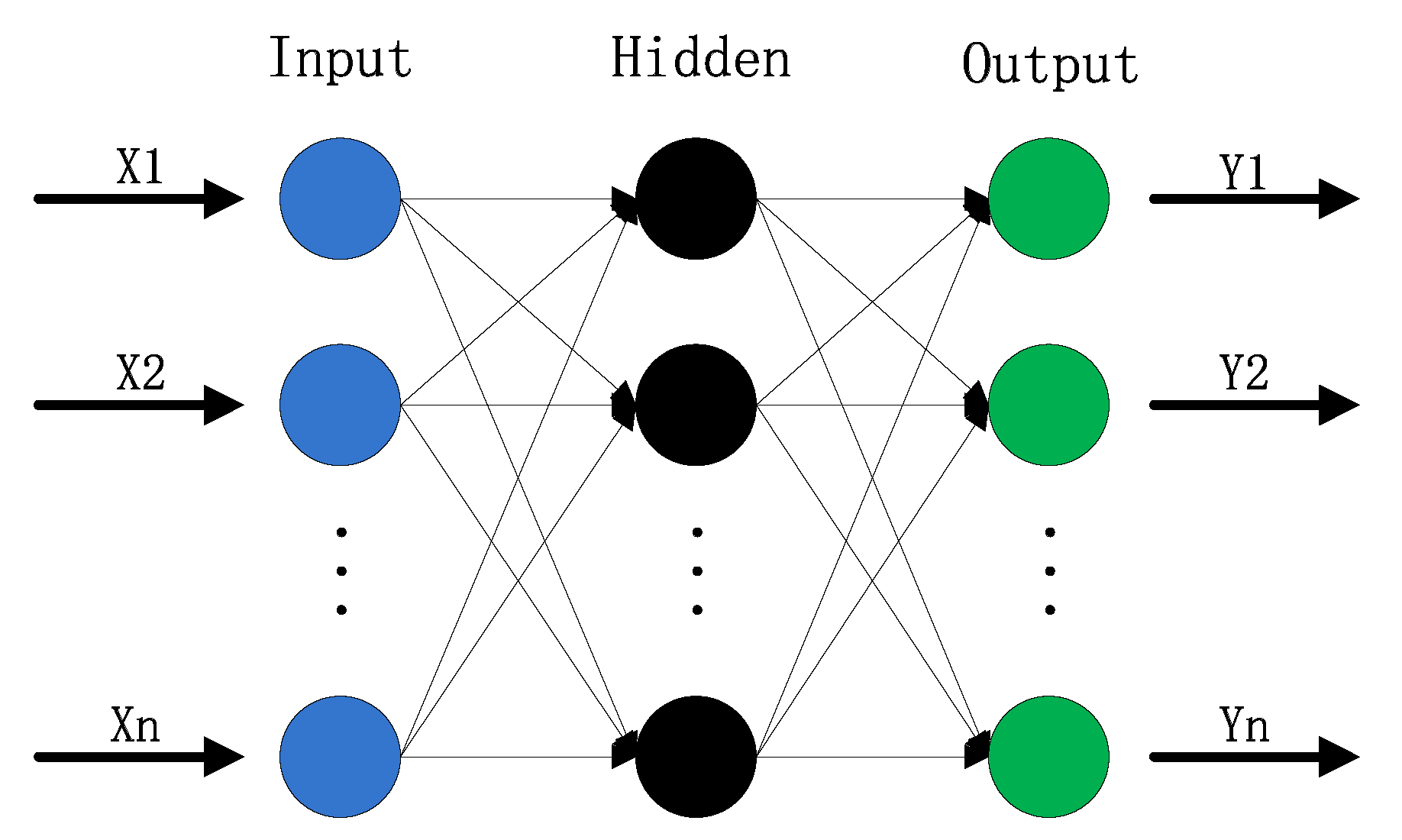
There are three layers in a BP network: the input layer, the hidden layer, and the output layer. The neurons are connected with others in the adjacent layers, but the neurons in the same layer are not connected with each other. The input and output layers are comprised of a single layer, but the hidden layer could have a different number of layers, and the number of neurons in each layer is also different depending upon the layer properties. We plot the topological structure of the BP network, which includes only one layer of the hidden layer (
Figure 3).
From the structure chart, it is evident that the signal is transmitted from the input layer to the output layer. The output value of each node in the hidden layer depends on the input value, the weight of each node in the input layer influencing the node value in the hidden layer, and the threshold value and activation function of each node in the hidden layer.
where
is the output value of the
jth neuron in the hidden layer when the input value was input,
is the weight where the ith value in the input layer influences the jth value in the hidden layer,
is the ith value in the input vector,
is the threshold of the
jth neuron in the hidden layer, and
is the activation function of the
jth neuron in the hidden layer. The signal transmission rule between the input layer and hidden layer is the same as the transmission rule between the hidden layer and the output layer.
The ANN model constructed in this study is trained based on a BP algorithm [
21]. When there is an error between the actual output value and ideal output value, which form the output value in the training data set, the error would be transmitted from the output layer to the hidden layer and input layer to amend the weight and threshold of each neuron. The training process is complete only when the error is less than the convergence threshold. Artificial neural network technology is highly suitable for simulating the non-linear relationship between atmospheric visibility and the influencing factors.
This study constructs the BP neural network system with three layers based on the MATLAB toolbox. The number of nodes of hidden layers is considered to be 5, the maximum number of iterations is 100, the study rate is 0.1, and the convergence threshold is taken as 0.00001. Considering that Vis changes with monthly features [
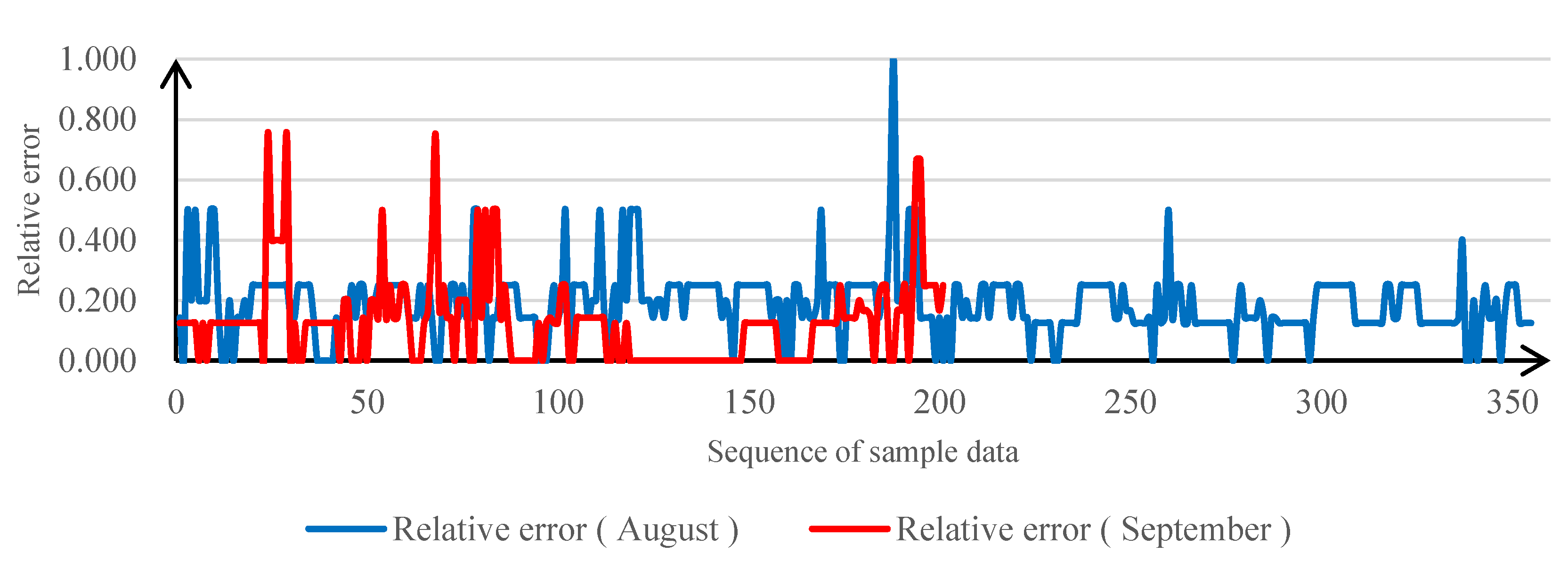
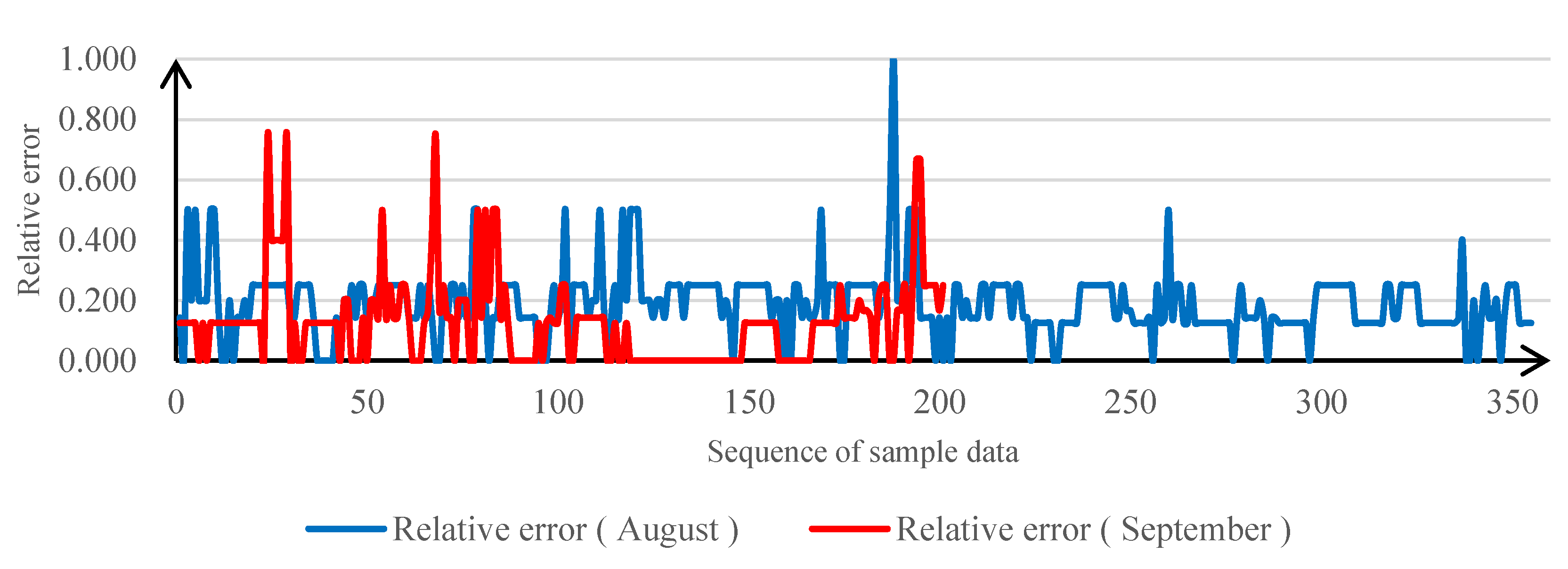
22], this paper inferred Vis for one month using ANN with the training data for that month. To test the fitting effect of the ANN model, the data from January 2010–2016 in the Indian Ocean (22.5° E–127.5° E, 70° S–25° N), representing a 7-year period, was employed to train the parameters of ANN, and the data from January 2017 was employed to test the parameters of the trained ANN model. To avoid the contingency of training results of neural networks due to the scarcity of training data, 30 experiments were repeated. Since the referred Vis grade based on ANN is not an integer, we defined its grade to the nearest grade. An average relative error of each observation point is defined as:
where
is the relative error,
is the referred Vis, and
is the measured Vis.
4. Discussion and Conclusions
Vis representing reflected light intensity seeing by a human has an important impact on the risk analysis of marine navigation systems, but current measurements and the prediction of Vis lack spatial coverage over remote areas such as marine environments and Arctic conditions. Geostationary satellites have global spatial coverage capability, but may not work accurately in northern latitudes and during the daytime because of high-level cloud cover and solar radiation impact. At the same time, Arctic regions still have a severe lack of observational networks [
25], and NWPs are limited because of microphysical and boundary layer algorithms [
7,
8].
This study aimed to discover the feasibility of using a reanalysis of meteorological data from the ECMWF and satellite-based AOD data from the National Aeronautics and Space Administration (NASA) MODIS products to monitor Vis. Certainly, a vertical extinction of visible light from satellites needs to be converted to horizontal Vis and needs geostationary polar orbiting satellite data in northern latitudes. The results showed that ANN analysis for Vis monitoring can promise better results representing remote marine environment conditions than conventional methods.
Although the inferred Vis has a higher accuracy than that of NWP and PCR predictions, an important issue still exists in the current analysis.
Figure 8 suggests that inferred Vis values had NaN values near shorelines because Ts is obtained from ECMWF analysis with NaN values, and this resulted in bad values in inferred Vis. This shows that the uncertainty still exists in the inferred Vis due to the uncertainty found in the gridded data of child nodes.
Reducing the uncertainty in the analysis requires improvements in the quality of collected data and microphysical algorithms in the NWP model simulations. The microphysical model of atmospheric Vis needs to be significantly improved, especially for sea fog [
4]. At the same time, with the development of Big Data technology, a deeper network could be used to infer Vis to reduce the uncertainty of the inferred Vis in the future. Meanwhile, improving the model by trying to take other factors influencing Vis into consideration is also necessary to reduce the uncertainty in the future. Since the method used to calculate AOD is the Inverse Distance Weighting Method, which is a common and simple method, better methods to calculate AOD will be studied in the future.
The current work suggested that Vis has a very important effect on the sea transportation safety, likely reducing accidents; therefore, a large amount of high-quality Vis data should be the basis for evaluating the navigability risk over remote areas. At the same time, the generated large amount of high-quality Vis data could be input into the Vis prediction model as an initial field to predict Vis in the future, which is so scarce now. The method used to generate gridded Vis in the paper can also be used to directly predict Vis in the future. If the objective is to predict Vis in a specific location, the constructed model should be trained with the data available for that location.
The overall results suggested that improved Vis products can be obtained using ANN analysis, but Vis prediction in foggy environments is still an issue because of the uncertainty exists in microphysical parameters simulated by the numerical models. This needs to be further studied. At the same time, large data sets should be used to adequately train the parameters of ANN. Perhaps, a better designed field project can help to develop improved ANN analysis for Vis predictions for marine environments.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}