Small-Signal Modeling and Analysis for a Wirelessly Distributed and Enabled Battery Energy Storage System of Electric Vehicles


Abstract
:Featured Application
Abstract
1. Introduction
- (1).
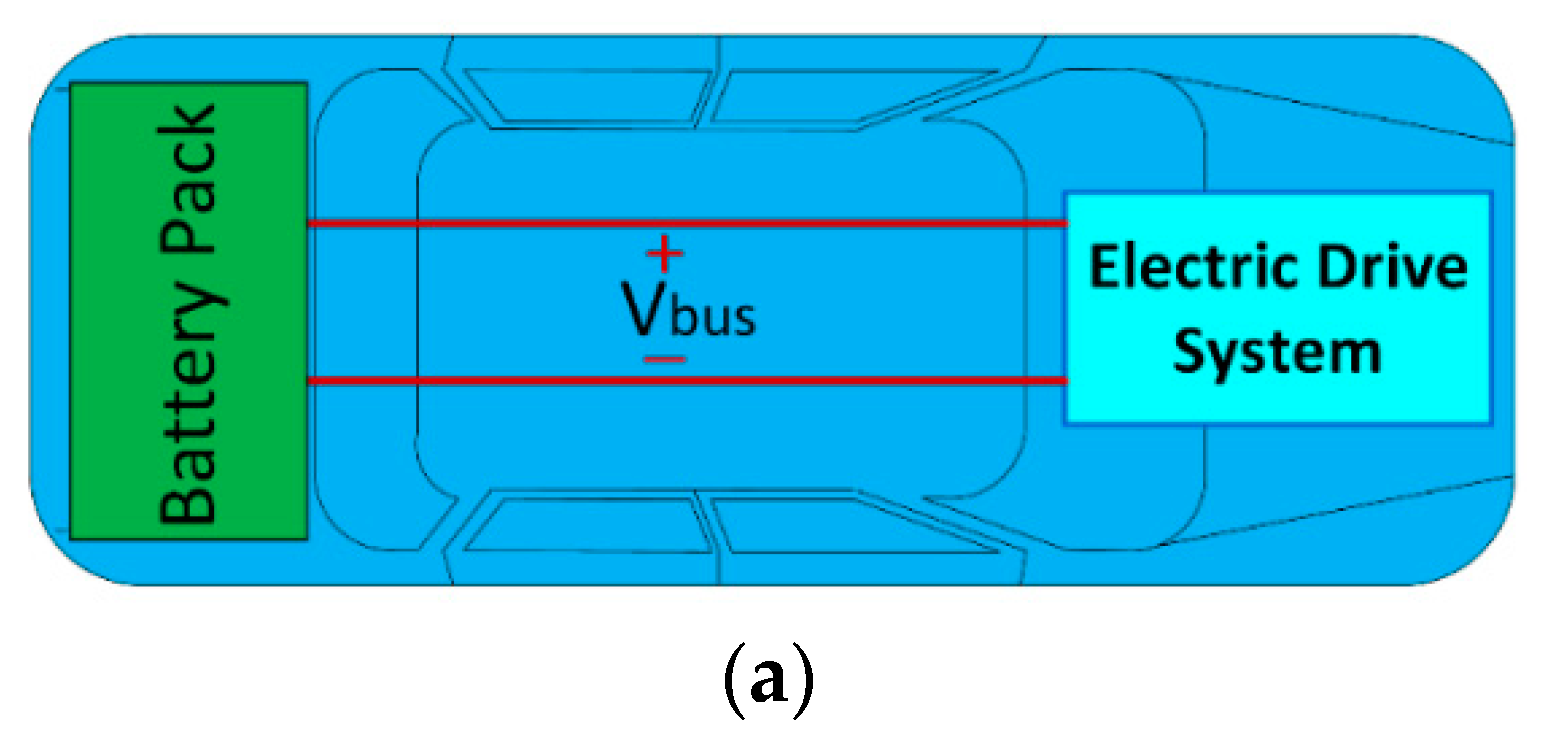
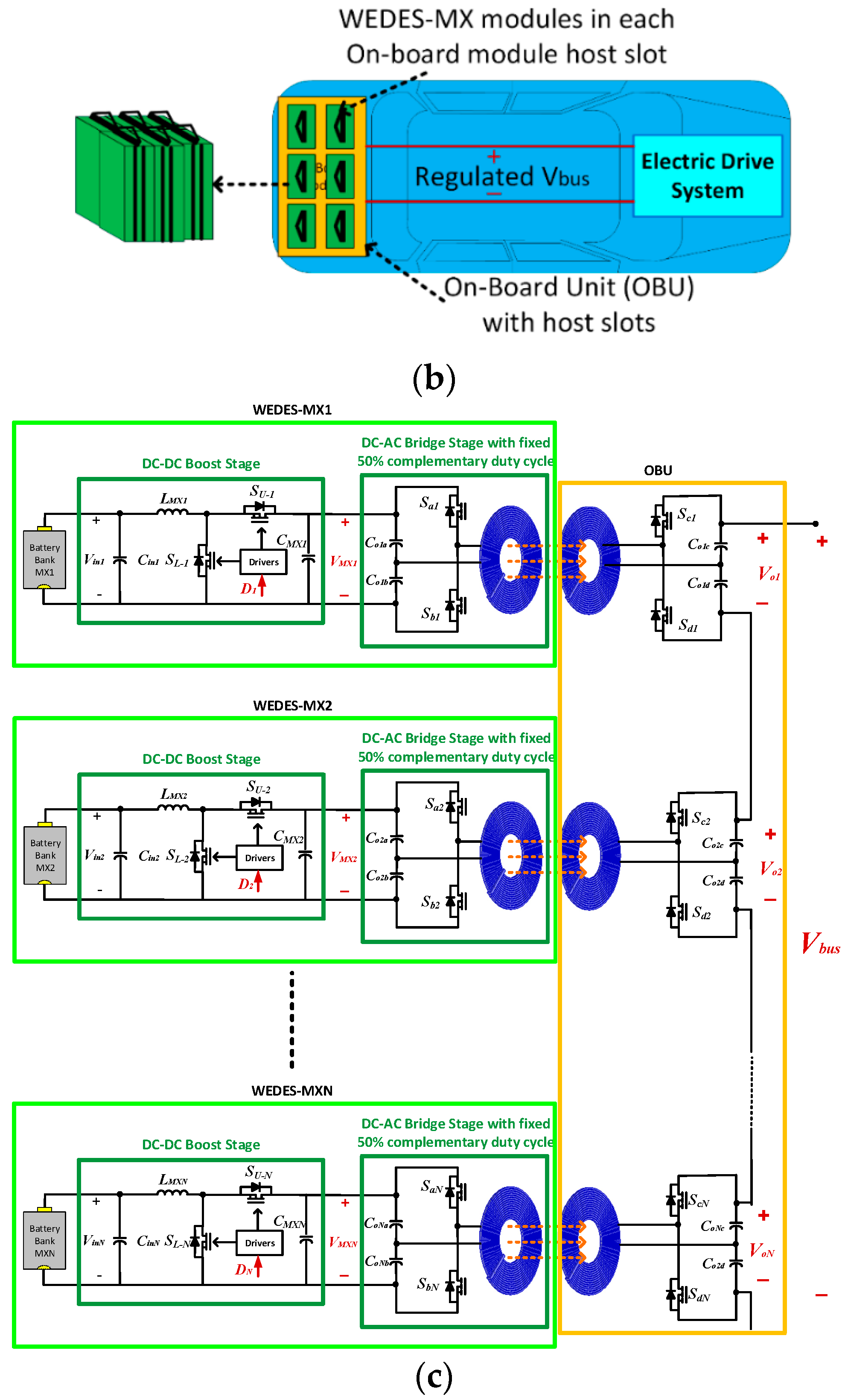
- The overall review of the wireless distributed WEDES system, which allows for fast and safe exchange/swapping of battery modules when utilized in electric vehicles (EVs) applications to deal with the range anxiety issue.
- (2).
- The derivation of small-signal modeling of the WEDES battery system to comprehensively analyze the steady-state stability and dynamic response of the WEDES battery system.
- (3).
- The discussion of the guidelines for the controller design of multiple interacted control loops.
- (4).
- The discussion of the simulation results and hardware experimental results to evaluate and validate the accuracy and effectiveness of the derived small-signal model and designed compensators.
2. Small-Signal Modeling of the Distributed WEDES System
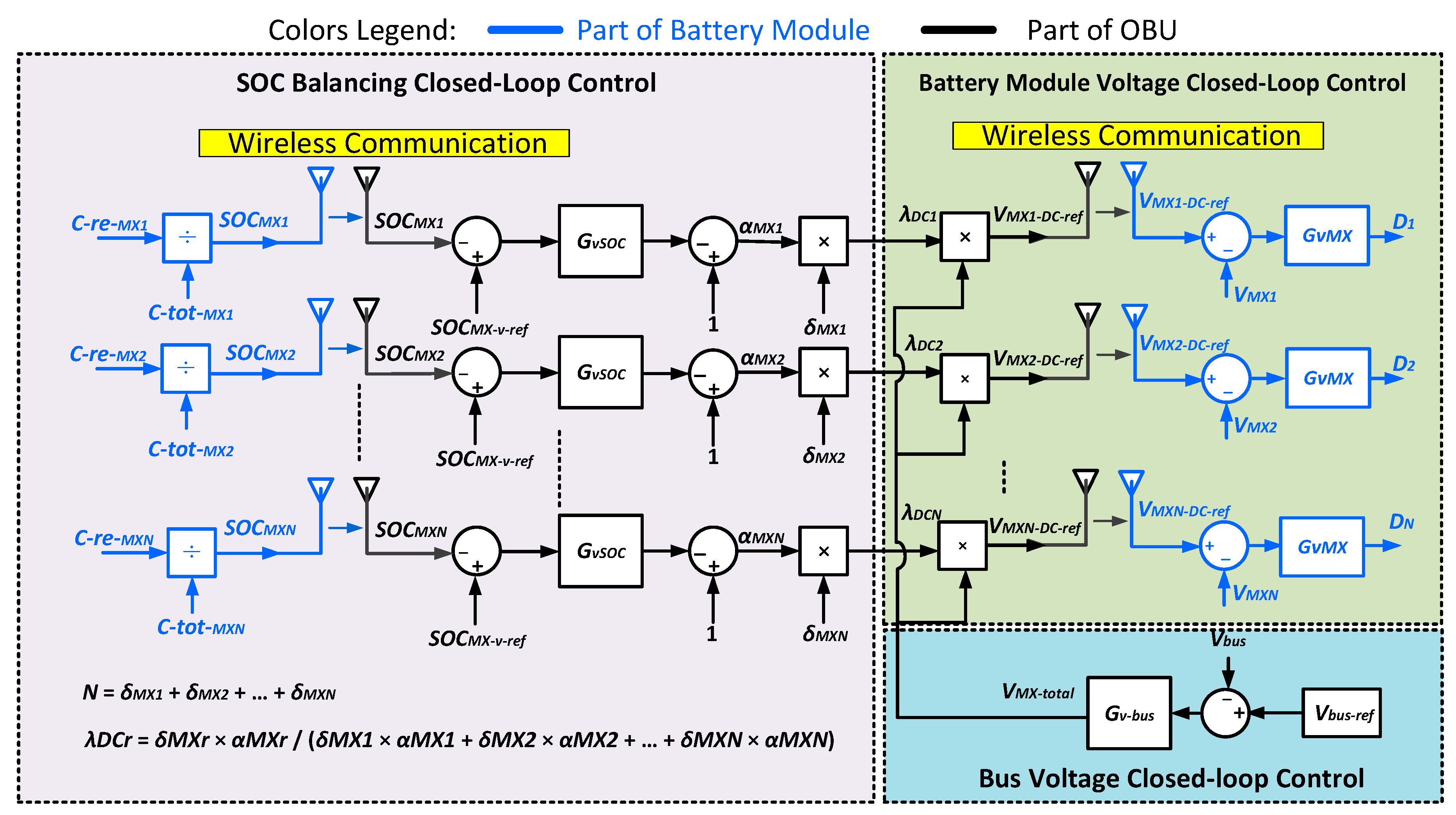
2.1. Overview of the WEDES System and Controller Operation Principle
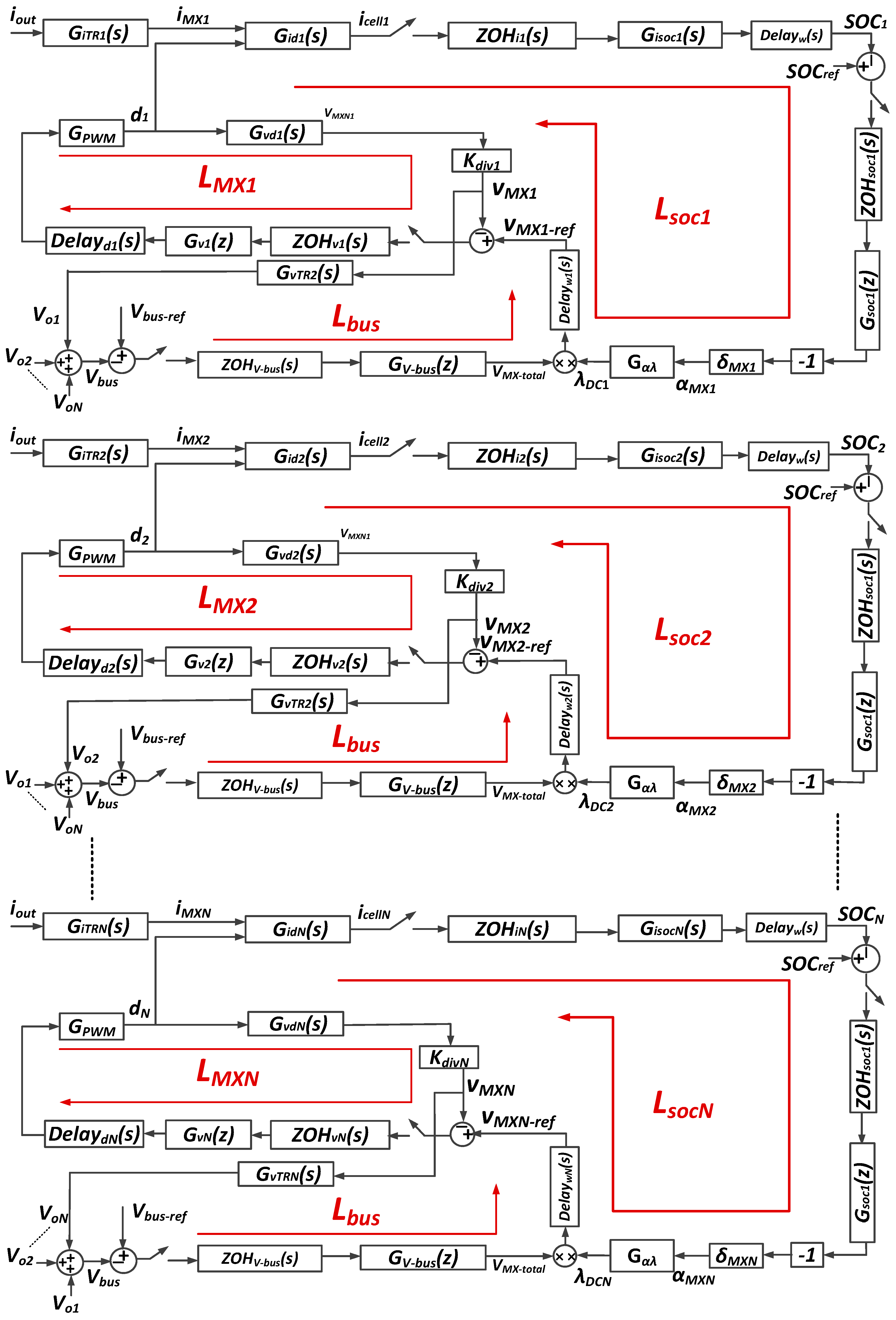
2.2. Small-signal Modeling
- : Bus voltage control loop gain;
- : Battery module voltage control loop gain;
- : SOC balancing control loop gain;
- : Duty cycle to DC-DC converter output voltage VMXN transfer function;
- : Duty cycle to cell current transfer function;
- : Cell current to cell SOC transfer function;
- : Gain of the input current of the half-bridge inverter to the output current of rectifier;
- : Gain of the input voltage of the half-bridge inverter to the output voltage of rectifier;
- : PWM module gain;
- : Output voltage sensing gain (including voltage divider gain and ADC conversion gain);
- : Delay of wireless communication;
- : Delay of digital computation;
- : Zero order hold model of voltage sampling;
- : Zero order hold model of current sampling;
- : Zero order hold model of SOC sampling.
2.3. Derivation of Transfer Functions
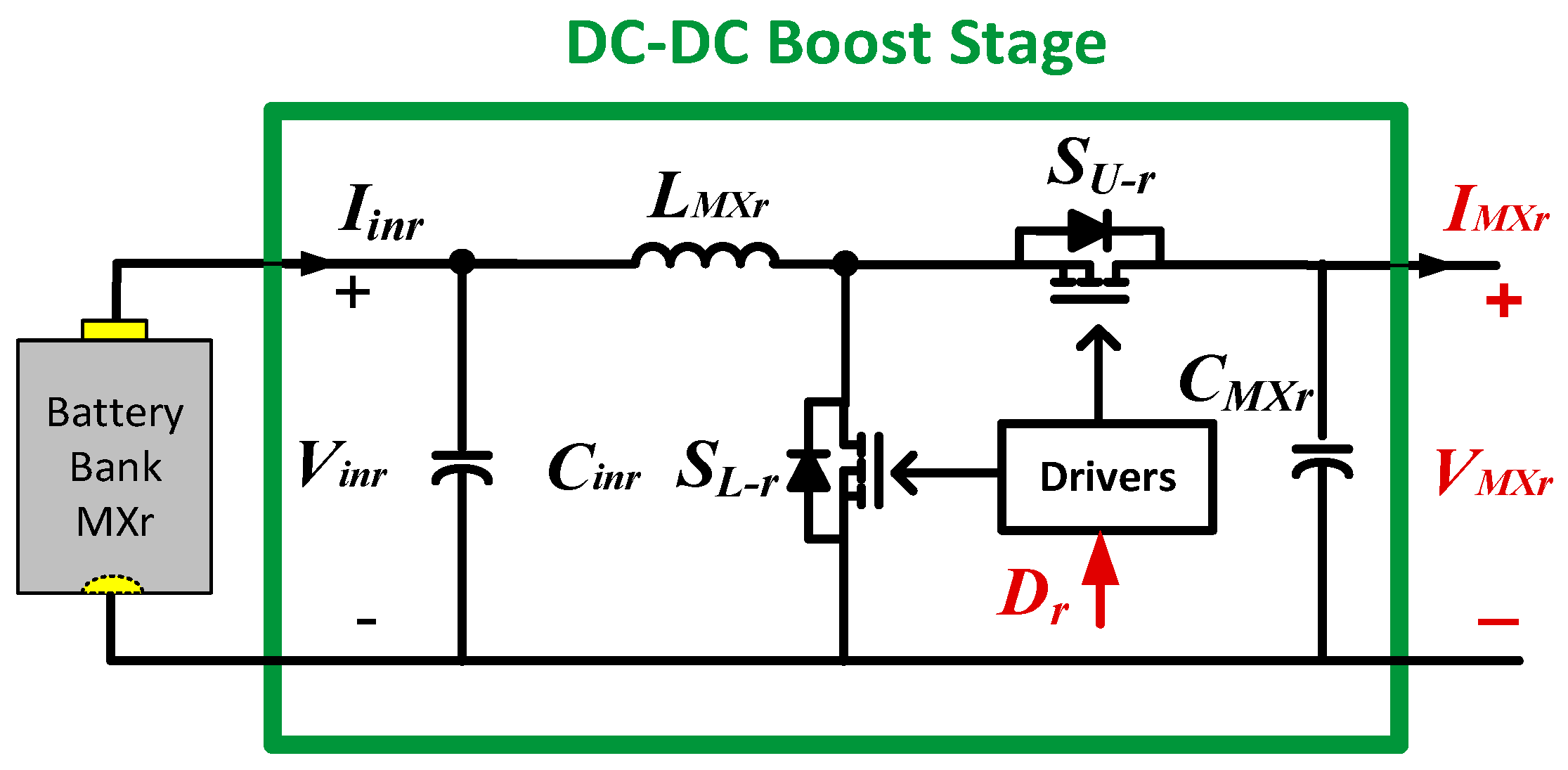
2.3.1. Transfer Function of DC-DC Boost Stage
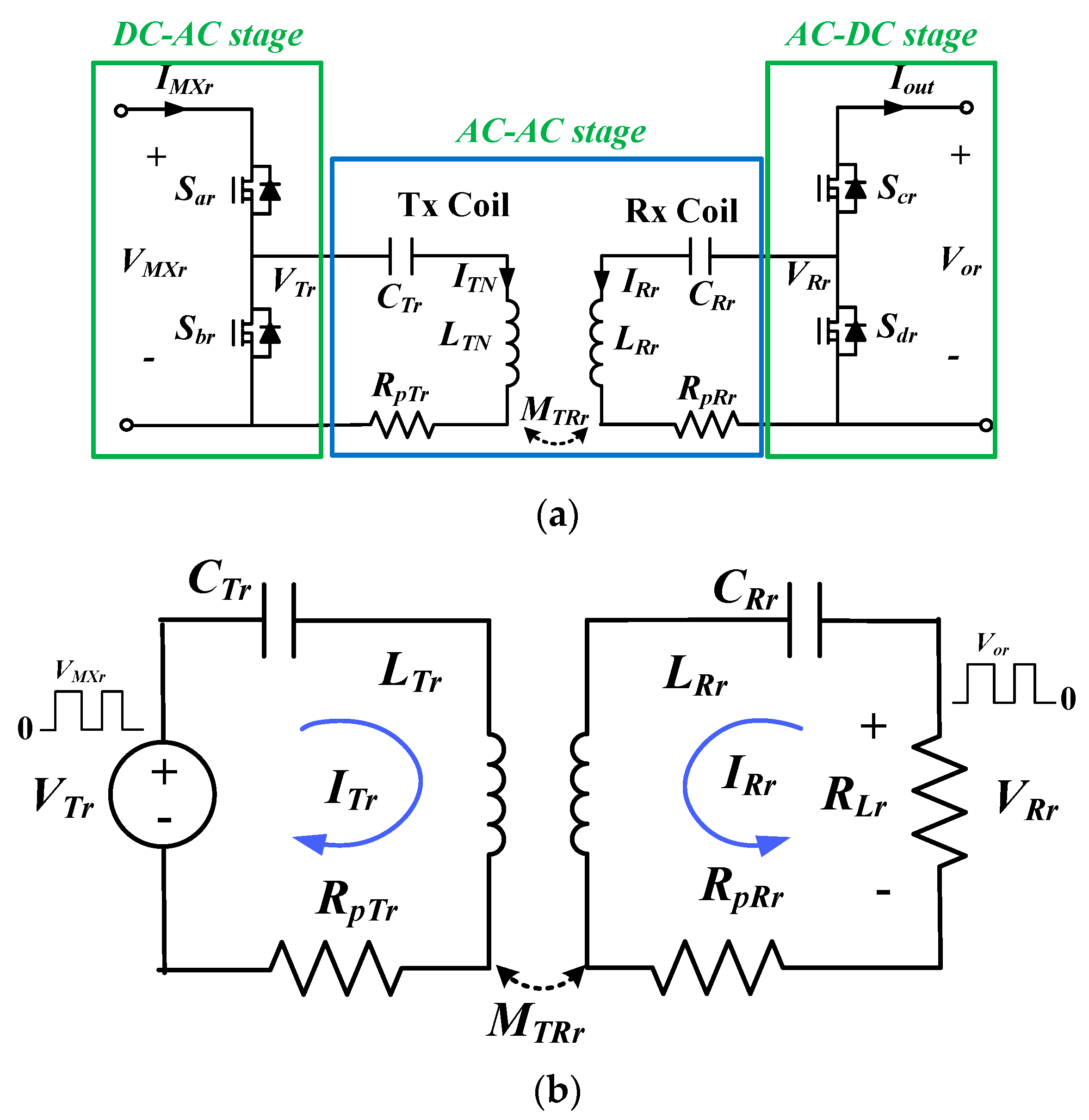
2.3.2. Transfer Function of WPT Stage (Half-Bridge Inverter, WPT Coils, and Half-Bridge Rectifier)
3. Compensator Design
3.1. Battery Module Voltage Control Loop Compensator Design
3.2. SOC Balancing Loop Compensator Design
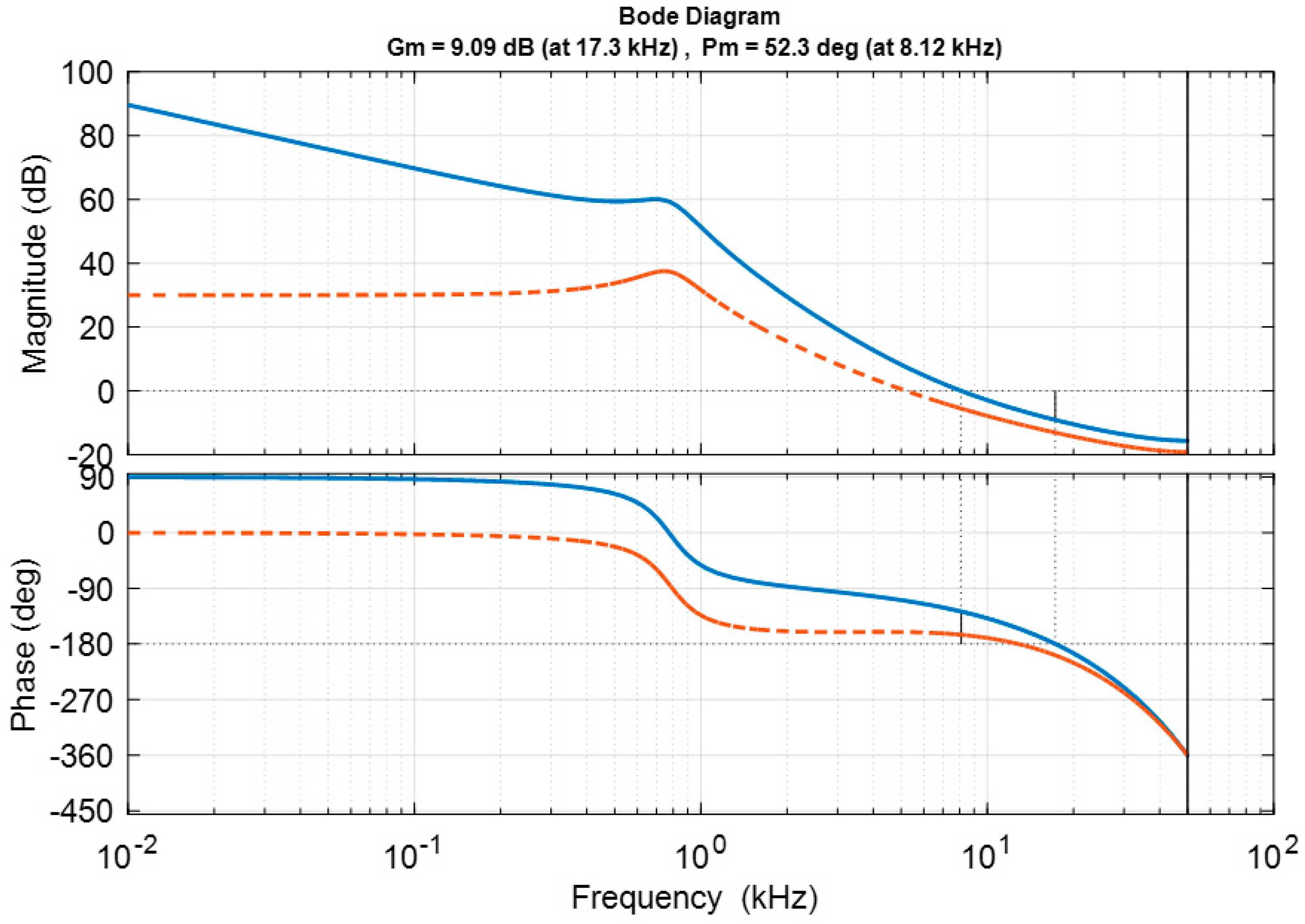
3.3. Bus Voltage Control Loop Compensator Design
4. Simulation and Model Experiment Validation
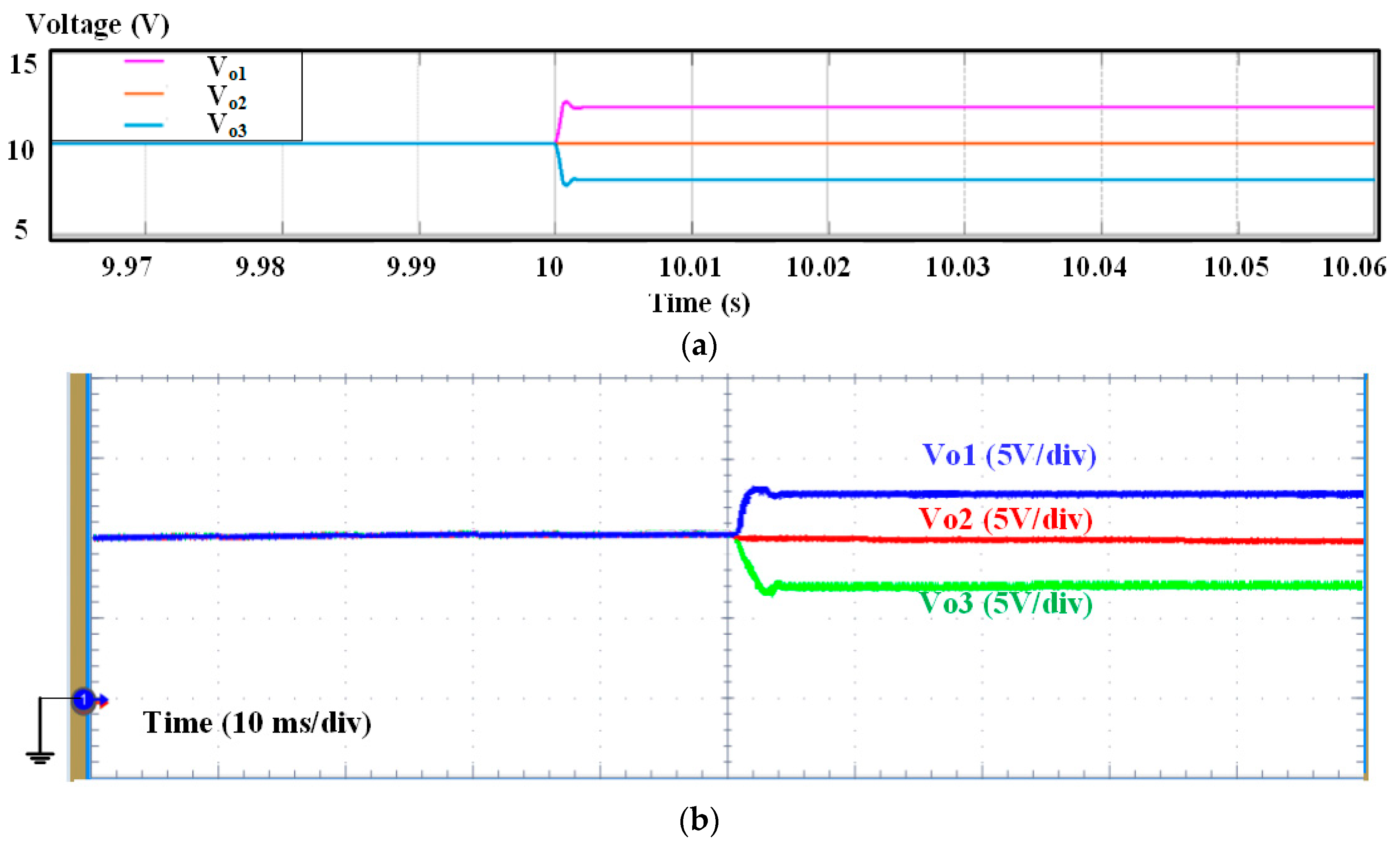
4.1. Experimental Results for Battery Module Voltage Control Loop
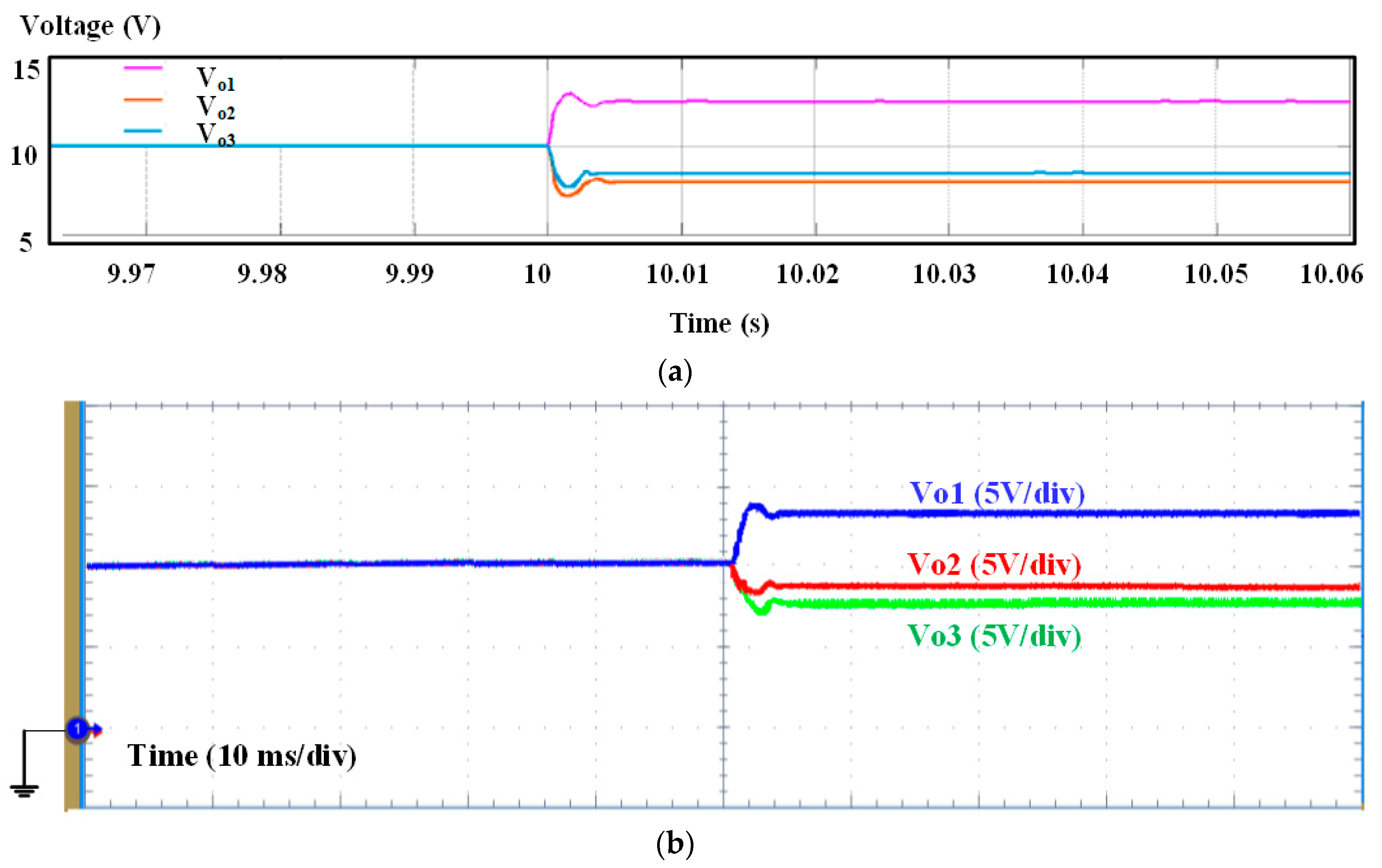
4.2. Experimental Results for SOC Balancing Control Loop
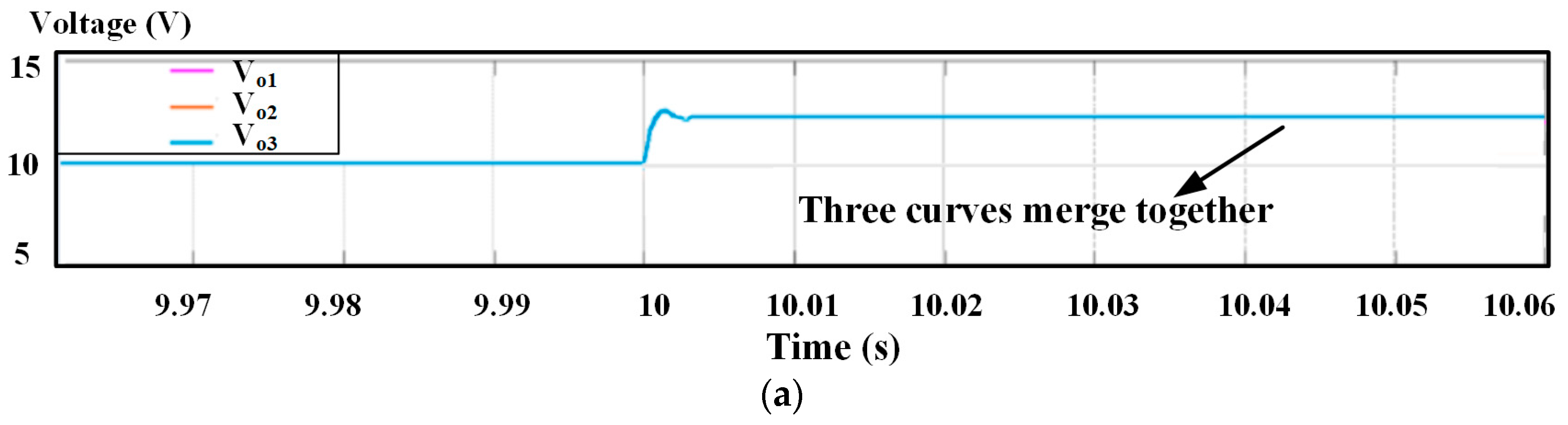
4.3. Experimental Results for Bus Voltage Control Loop
5. Additional Comment
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Abu Qahouq, J.; Cao, Y. Control scheme and power electronics architecture for a wirelessly distributed and enabled battery energy storage system. Energies 2018, 11, 1887. [Google Scholar] [CrossRef]
- Lelie, M.; Braun, T.; Knips, M.; Nordmann, H.; Ringbeck, F.; Zappen, H.; Sauer, D.U. Battery management system hardware concepts: An overview. Appl. Sci. 2018, 8, 534. [Google Scholar] [CrossRef]
- Charging Station (Battery Swapping section). Wikipedia, the Free Encyclopedia. Available online: https://en.wikipedia.org/wiki/Charging_station#Battery_swapping (accessed on 24 August 2019).
- Shao, S.; Guo, S.; Qiu, X. A mobile battery swapping service for electric vehicles based on a battery swapping van. Energies 2017, 10, 1667. [Google Scholar] [CrossRef]
- Hou, J.; Yang, Y.; He, H.; Gao, T. Adaptive Dual Extended Kalman Filter Based on Variational Bayesian Approximation for Joint Estimation of Lithium-Ion Battery State of Charge and Model Parameters. Appl. Sci. 2019, 9, 1726. [Google Scholar] [CrossRef]
- Cao, Y.; Abu Qahouq, J.A. Analysis and Evaluation of a Dual-Variable Closed-Loop Control of Power Converter with Wireless and Nonwireless Power Transfer. IEEE Trans. Ind. Electron. 2019, 66, 2668–2679. [Google Scholar] [CrossRef]
- Chen, J.; Chen, C.; Duan, S. Cooperative Optimization of Electric Vehicles and Renewable Energy Resources in a Regional Multi-Microgrid System. Appl. Sci. 2019, 9, 2267. [Google Scholar] [CrossRef]
- Rakhymbay, A.; Khamitov, A.; Bagheri, M.; Alimkhanuly, B.; Lu, M.; Phung, T. Precise analysis on mutual inductance variation in dynamic wireless charging of electric vehicle. Energies 2018, 11, 624. [Google Scholar] [CrossRef]
- Schroeder, A.; Traber, T. The economics of fast charging infrastructure for electric vehicles. Energy Policy 2012, 43, 136–144. [Google Scholar] [CrossRef]
- Kong, P.Y.; Karagiannidis, G. Charging schemes for plug-in hybrid electric vehicles in smart grid: A. survey. IEEE Access 2016, 4, 6846–6875. [Google Scholar] [CrossRef]
- Deutsches Elektronen-Synchrotron DESY. Fast Charging Cycles Make Batteries Age More Quickly: X-Ray Study Images Damage in Lithium-Ion Batteries. Science Daily. April 2015. Available online: www.sciencedaily.com/releases/2015/04/150414094117.htm (accessed on 24 August 2019).
- Chandrasekaran, R. Quantification of bottlenecks to fast charging of lithium-ion-insertion cells for electric vehicles. J. Power Sources 2014, 271, 622–632. [Google Scholar] [CrossRef]
- Whitney, L. Tesla Demos Electric Battery Swap in just 90 Seconds. CNET. June 2013. Available online: https://www.cnet.com/news/tesla-demos-electric-battery-swap-in-just-90-seconds/ (accessed on 24 August 2019).
- Miller, J.M.; Jones, P.T.; Li, J.M.; Onar, O.C. ORNL experience and challenges facing dynamic wireless power charging of EV’s. IEEE Circuits Syst. Mag. 2015, 15, 40–53. [Google Scholar] [CrossRef]
- Zhu, Q.; Wang, L.; Liao, C. Compensate capacitor optimization for kilowatt-level magnetically resonant wireless charging system. IEEE Trans. Ind. Electron. 2014, 61, 6758–6768. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, H.; Ning, Z.; Mu, Z.; Sun, C. Comparative research on RC equivalent circuit models for lithium-ion batteries of electric vehicles. Appl. Sci. 2017, 7, 1002. [Google Scholar] [CrossRef]
- Luo, Z.; Wei, X. Analysis of square and circular planar spiral coils in wireless power transfer system for electric vehicles. IEEE Trans. Ind. Electron. 2018, 65, 331–341. [Google Scholar] [CrossRef]
- Cao, Y.; Abu Qahouq, J.A. Modelling and control design of reconfigurable wireless power transfer system for transmission efficiency maximization and output voltage regulation. IET Power Electron. 2019, 12, 1903–1916. [Google Scholar] [CrossRef]
- Dang, Z.; Cao, Y.; Abu Qahouq, J.A. Reconfigurable Magnetic Resonance-Coupled Wireless Power Transfer System. IEEE Trans. Power Electron. 2015, 30, 6057–6069. [Google Scholar] [CrossRef]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Springer: Berlin/Heidelberg, Germany, 2001; pp. 265–330. [Google Scholar]
- Wang, Y.; Lin, F.; Yang, Z.P.; Liu, Z.Y. Analysis of the Influence of Compensation Capacitance Errors of a Wireless Power Transfer System with SS Topology. Energies 2017, 10, 2177. [Google Scholar] [CrossRef]
- Galigekere, V.P.; Pries, J.; Onar, O.C.; Su, G.; Anwar, S.; Wiles, R.; Seiber, L.; Wilkins, J. Design implementation of an optimized 100 kW stationary wireless charging system for EV battery recharging. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 3587–3592. [Google Scholar]
- Cao, Y.; Abu Qahouq, J.A. Evaluation of bi-directional single-inductor multi-input battery system with state-of-charge balancing control. IET Power Electron. 2018, 11, 2140–2150. [Google Scholar] [CrossRef]
- Efstratios, C.; Rogers, D.J. Cell SoC balancing using a cascaded full bridge multilevel converter in battery energy storage systems. IEEE Trans. Ind. Electron. 2016, 63, 5394–5402. [Google Scholar]
- Qian, H.; Zhang, J.; Lai, J.S.; Yu, W. A high-efficiency grid-tie battery energy storage system. IEEE Trans. Power Electron. 2011, 26, 886–896. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| VMXr | 0–20 V | LT, LR | 24 µH |
| Vbus-ref | 30 V | CT, CR | 0.4 µF |
| Iout | 2 A | kTR | 0.3 |
| LMXr | 47 µH | RpT, RRT @ 50 kHz | 0.1 Ω |
| CMXr | 220 µF | fsw_bridge | 50 kHz |
| fsw_converter | 100 kHz | - | - |
| Parameter | WEDES System in this Paper | Conventional LC Compensation WPT System [18,21,22] | Conventional BESS System [23,24,25] |
|---|---|---|---|
| Typical Components/Devices | Battery cells, power converter, inverter, WPT coils, and rectifier | Battery cells, inverter, WPT coils, and rectifier | Battery cells and power converter/inverter |
| System Complexity | Medium | Medium | Low |
| Able to Realize SOC Balancing | Yes | No | Yes |
| Able to Realize Voltage Regulation | Yes | Yes | Yes |
| Typical Battery Operation | Discharging | Charging | Discharging |
| Able to Transfer Power Wirelessly | Yes | Yes | No |
| Able to Insert/Remove Battery Module during Normal Operation | Yes | No | No |
| Efficiency | High (>85%) | High (>90% at short distance) | Highest (>95%) |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Qahouq, J.A. Small-Signal Modeling and Analysis for a Wirelessly Distributed and Enabled Battery Energy Storage System of Electric Vehicles. Appl. Sci. 2019, 9, 4249. https://doi.org/10.3390/app9204249
Cao Y, Qahouq JA. Small-Signal Modeling and Analysis for a Wirelessly Distributed and Enabled Battery Energy Storage System of Electric Vehicles. Applied Sciences. 2019; 9(20):4249. https://doi.org/10.3390/app9204249
Chicago/Turabian StyleCao, Yuan, and Jaber Abu Qahouq. 2019. "Small-Signal Modeling and Analysis for a Wirelessly Distributed and Enabled Battery Energy Storage System of Electric Vehicles" Applied Sciences 9, no. 20: 4249. https://doi.org/10.3390/app9204249
APA StyleCao, Y., & Qahouq, J. A. (2019). Small-Signal Modeling and Analysis for a Wirelessly Distributed and Enabled Battery Energy Storage System of Electric Vehicles. Applied Sciences, 9(20), 4249. https://doi.org/10.3390/app9204249