Control Technology of Ground-Based Laser Communication Servo Turntable via a Novel Digital Sliding Mode Controller


Abstract
:1. Introduction
- (1)
- The frequency domain characteristic of the turntable pitch axis is tested by the classical sweep method [33]. According to the frequency domain characteristic curve, the system model is obtained by the traditional identification method, which is the precondition for the design of SMC.
- (2)
- A novel reaching law with a disturbance compensator is proposed to solve the chattering problem, which is robust to system model identification error, friction, and other nonlinear disturbances. Both mathematical calculation and simulation support the effectiveness of the algorithm.
- (3)
- The proposed digital SMC algorithm, the traditional digital PID algorithm, and the existing chatter-reduced SMC algorithm were compared. The experimental results show that the proposed algorithm provides higher control accuracy, stronger anti-interference ability, better frequency domain characteristics, and also suppresses chattering for an improved ground-based laser communication servo turntable control system.
2. Model Identification of Ground-Based Laser Communication Servo Turntable
2.1. System Frequency Domain Characteristic Test
2.2. System Model Identification
3. Design and Simulation of a Velocity Loop Controller Based on Discrete SMC
3.1. Basic Theory of Discrete SMC
3.1.1. System Discrete Time Ideal Equation of State
3.1.2. Discrete Sliding Mode Function and the Sliding Mode Surface
3.1.3. The Quasi Sliding Mode Domain
3.2. A Novel Chatter-Free Approach Law Sliding Mode Control Based on Disturbance Compensator
3.3. Proof of Robustness and Stability of SMC
3.4. Sliding Mode Simulation
4. Experimental Verification of Control Algorithm
4.1. Closed-Loop Experiment of Fixed Speed Signal
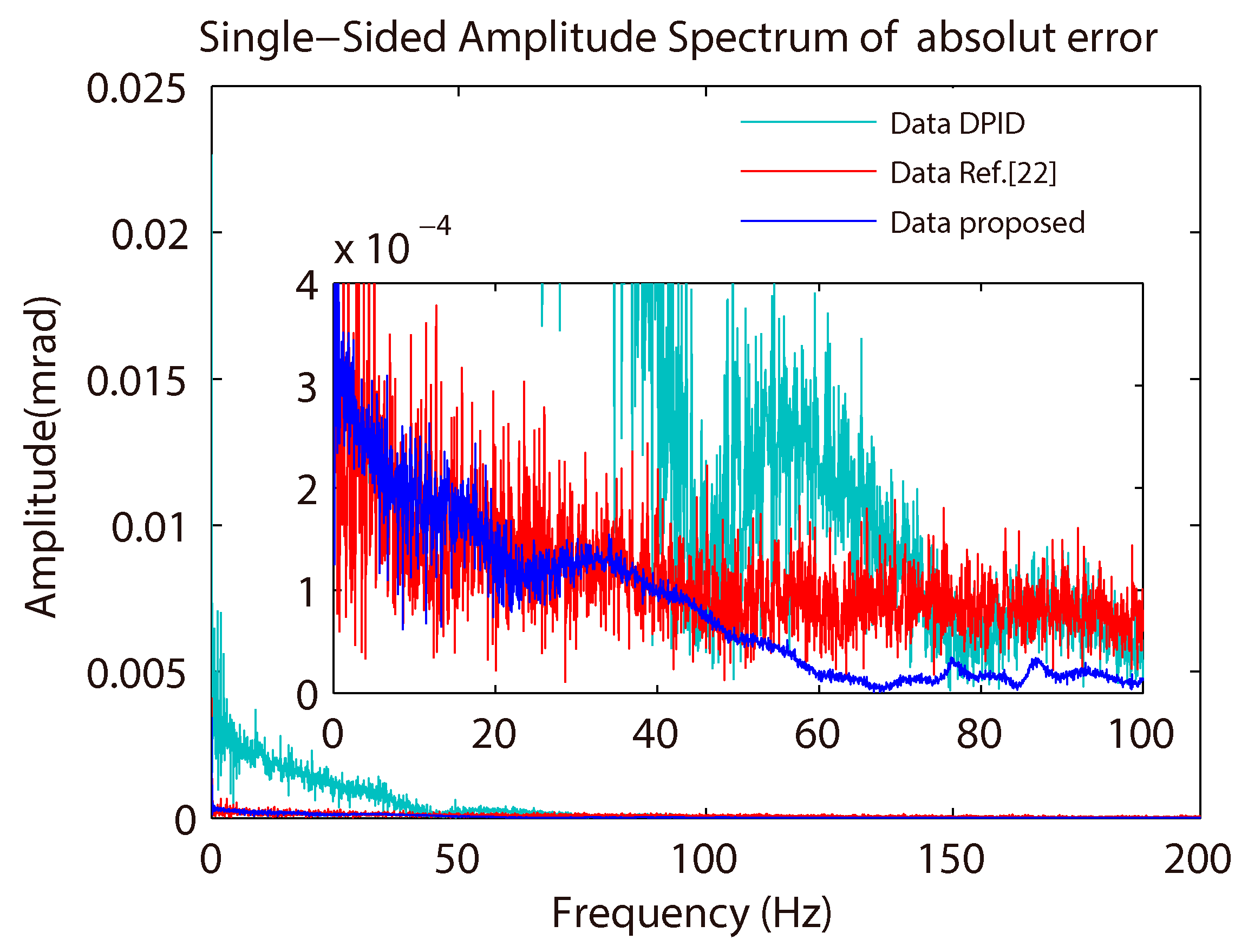
4.2. Sinusoidal Guidance Experiments
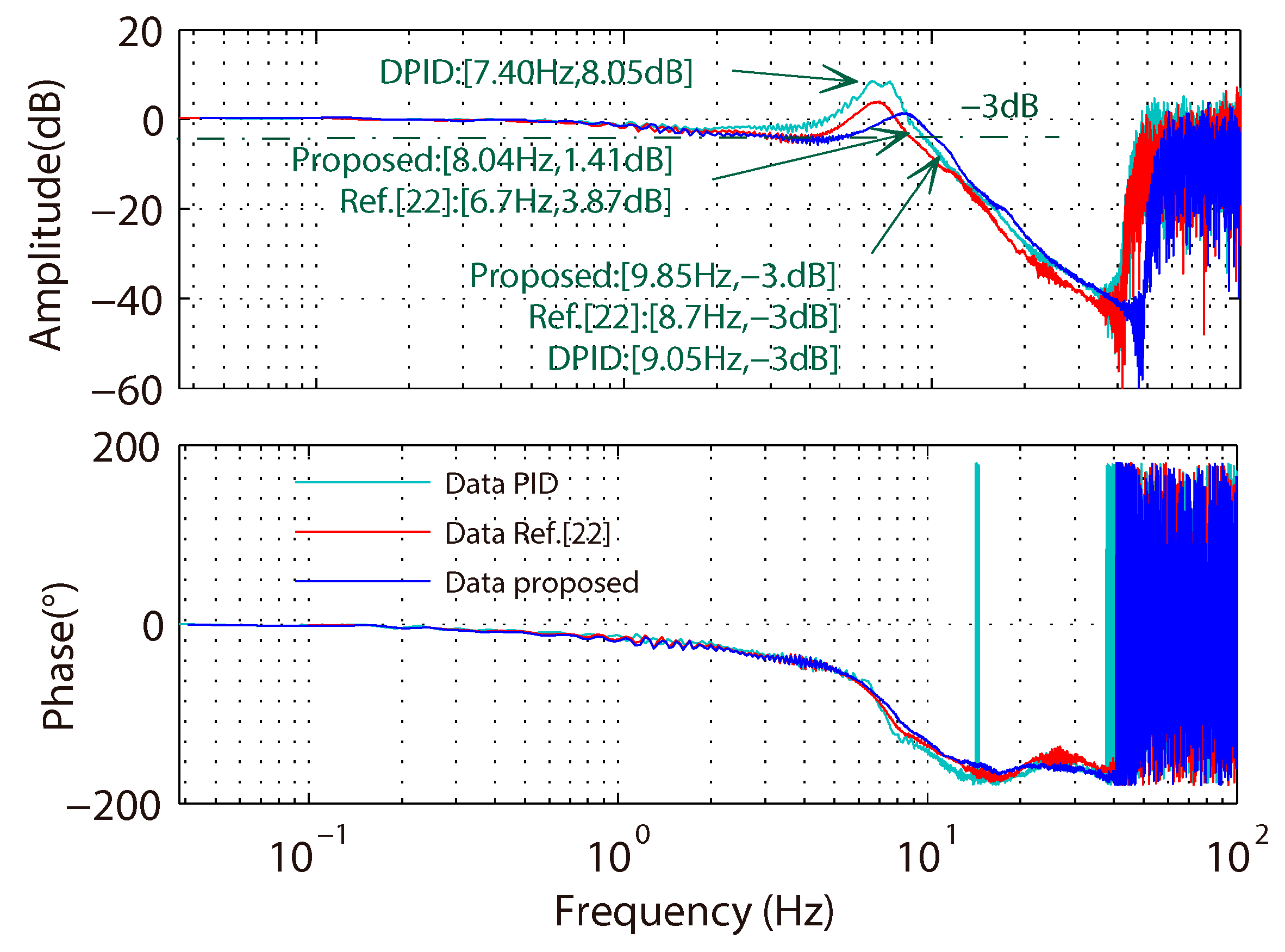
4.3. Closed-Loop Sweep Experiment
4.4. Summary
5. Conclusion
Author Contributions
Funding
Conflicts of Interest
References
- Jiao, D.D.; Jing, G.; Jie, L.; Xue, D.; Xu, G.J.; Chen, J.P.; Dong, R.F.; Tao, L.; Zhang, S.G. Development and application of communication band narrow linewidth lasers. Acta Phys. Sin. 2015, 64. [Google Scholar] [CrossRef]
- Mita, T.; Ohashi, J.; Venkatesan, M.; Marma, A.S.P.; Nakamura, M.; Plowe, C.V.; Tanabe, K. Acquisition and tracking control of satellite-borne laser communication systems and simulation of downlink fluctuations. BMC Syst. Biol. 2006, 45, 1–20. [Google Scholar]
- Smith, R.J.; Casey, W.L.; Begley, D.L. Wideband laser diode transmitter for free-space communication. Opt. Eng. 1988, 27, 344–351. [Google Scholar] [CrossRef]
- Jian, G.; Yong, A. Design of active disturbance rejection controller for space optical communication coarse tracking system. In Proceedings of the AOPC: Advances in Laser Technology & Applications, Beijing, China, 5–7 May 2015. [Google Scholar]
- Shimizu, M.; Yamashita, T.; Eto, D.; Toyoshima, M.; Takayama, Y. Cooperative Control Algorithm of the Fine/Coarse Tracking System for 40Gbps Free-Space Optical Communication. In Proceedings of the AIAA International Communications Satellite System Conference, Ottawa, ON, Canada, 24–27 September 2012. [Google Scholar]
- Kingsbury, R.; Cahoy, K. Development of a pointing, acquisition, and tracking system for a CubeSat optical communication module. In Proceedings of the SPIE LASE, San Francisco, CA, USA, 1–6 February 2015. [Google Scholar]
- Li, M.Q.; Jiang, S.H. Design of Optimum Controller of APT Fine Tracking Control. System. Adv. Mat. Res. 2013, 712–715, 2738–2741. [Google Scholar] [CrossRef]
- Min, Z.; Liang, Y. Compound tracking in ATP system for free space optical communication. In Proceedings of the International Conference on Mechatronic Science, Jilin, China, 19–22 Augest 2011. [Google Scholar]
- Fei, L.; Yan, Z.; Duan, S.; Yin, J.; Liu, B.; Liu, F. Parameter Design of a Two-Current-Loop Controller Used in a Grid-Connected Inverter System With LCL Filter. IEEE Trans. Ind. Electron. 2009, 56, 4483–4491. [Google Scholar]
- Grzesiak, L.M.; Tarczewski, T. PMSM servo-drive control system with a state feedback and a load torque feedforward compensation. Int. J. Comput. Math. Electric. Electron. Eng. 2013, 32, 364–382. [Google Scholar] [CrossRef]
- Shen, W.H.; Chen, X.Q.; Pons, M.N.; Corriou, J.P. Model predictive control for wastewater treatment process with feedforward compensation. Chem. Eng. J. 2009, 155, 161–174. [Google Scholar] [CrossRef]
- Carvajal, J.; Chen, G.; Ogmen, H. Fuzzy PID controller: Design, performance evaluation, and stability analysis. Inf. Sci. 2000, 123, 249–270. [Google Scholar] [CrossRef]
- Li, H.X.; Zhang, L.; Cai, K.Y.; Chen, G. An improved robust fuzzy-PID controller with optimal fuzzy reasoning. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2005, 35, 1283–1294. [Google Scholar] [CrossRef]
- Mann, G.I.; Hu, B.G.; Gosine, R.G. Analysis of direct action fuzzy PID controller structures. I IEEE Trans. Syst. Man Cybern. Part B Cybern. 1999, 29, 371–388. [Google Scholar] [CrossRef]
- Jung, J.W.; Leu, V.Q.; Do, T.D.; Kim, E.K.; Han, H.C. Adaptive PID Speed Control. Design for Permanent Magnet Synchronous Motor Drives. IEEE Trans. Power Electron. 2014, 30, 900–908. [Google Scholar] [CrossRef]
- Kuc, T.Y.; Han, W.G. An adaptive PID learning control of robot manipulators. Automatica 2000, 36, 717–725. [Google Scholar] [CrossRef]
- Li, S.; Xu, Y.; Di, Y. Active disturbance rejection control for high pointing accuracy and rotation speed. Automatica 2009, 45, 1854–1860. [Google Scholar] [CrossRef]
- Zhu, E.; Pang, J.; Na, S.; Gao, H.; Sun, Q.; Chen, Z. Airship horizontal trajectory tracking control based on Active Disturbance Rejection Control. (ADRC). Nonlinear Dyn. 2012, 75, 725–734. [Google Scholar] [CrossRef]
- Bo, E. Adaptive control stability, convergence, and robustness: Shankar Sastry and Marc Bodson. Automatica 1993, 29, 802–803. [Google Scholar]
- Liu, Z.G.; Wu, Y.Q. Universal strategies to explicit adaptive control of nonlinear time-delay systems with different structures. Automatica 2018, 89, 151–159. [Google Scholar] [CrossRef]
- Sun, T.; Pan, Y.; Zhang, J.; Yu, H. Robust model predictive control for constrained continuous-time nonlinear systems. Int. J. Control 2017, 91, 1–16. [Google Scholar] [CrossRef]
- Ma, H.; Wu, J.; Xiong, Z. A Novel Exponential Reaching Law of Discrete-Time Sliding-Mode Control. IEEE Trans. Ind. Electron. 2017, 64, 3840–3850. [Google Scholar] [CrossRef]
- Du, H.; Yu, X.; Chen, M.Z.Q.; Li, S. Chattering-free discrete-time sliding mode control. Automatica 2016, 68, 87–91. [Google Scholar] [CrossRef]
- Abidi, K.; Xu, J.X.; She, J.H. A Discrete-Time Terminal Sliding-Mode Control. Approach Applied to a Motion Control. Problem. IEEE Trans. Ind. Electron. 2009, 56, 3619–3627. [Google Scholar] [CrossRef]
- Li, S.; Du, H.; Yu, X. Discrete-Time Terminal Sliding Mode Control. Systems Based on Euler’s Discretization. IEEE Trans. Autom. Control 2014, 59, 546–552. [Google Scholar] [CrossRef]
- Xu, Q. Digital Integral Terminal Sliding Mode Predictive Control. of Piezoelectric-Driven Motion System. IEEE Trans. Ind. Electron. 2016, 63, 3976–3984. [Google Scholar] [CrossRef]
- Mobayen, S. Adaptive Global Terminal Sliding Mode Control. Scheme with Improved Dynamic Surface for Uncertain Nonlinear Systems. Int. J. Control Autom. Syst. 2018, 16, 1692–1700. [Google Scholar] [CrossRef]
- Levant, A. Homogeneity approach to high-order sliding mode design. Automatica 2005, 41, 823–830. [Google Scholar] [CrossRef]
- Mobayen, S.; Tchier, F. A novel robust adaptive second-order sliding mode tracking control technique for uncertain dynamical systems with matched and unmatched disturbances. Int. J. Control Autom. Syst. 2017, 15, 1097–1106. [Google Scholar] [CrossRef]
- Afshari, M.; Mobayen, S.; Hajmohammadi, R.; Baleanu, D. Global Sliding Mode Control. Via Linear Matrix Inequality Approach for Uncertain Chaotic Systems With Input Nonlinearities and Multiple Delays. J. Comput. Nonlinear Dyn. 2018, 13, 3. [Google Scholar] [CrossRef]
- Mobayen, S.; Tchier, F. Composite nonlinear feedback integral sliding mode tracker design for uncertain switched systems with input saturation. Commun. Nonlinear Sci. Numer. Simul. 2018, 65, 173–184. [Google Scholar] [CrossRef]
- Mobayen, S. Adaptive global sliding mode control of underactuated systems using a super-twisting scheme: an experimental study. J. Vib. Control 2019, 25, 2215–2224. [Google Scholar] [CrossRef]
- Yongting, D.; Hongwen, L.I.; Tao, C. Dynamic analysis of two meters telescope mount control system. Opt. Prec. Eng. 2018, 26, 654–661. [Google Scholar]
- Kwan, C. Further results on variable output feedback controllers. IEEE Trans. Autom. Control 2001, 46, 1505–1508. [Google Scholar] [CrossRef]
- Cong, B.L.; Chen, Z.; Liu, X.D. On adaptive sliding mode control without switching gain overestimation. Int. J. Robust Nonlinear Control 2014, 24, 515–531. [Google Scholar] [CrossRef]
- Roy, S.; Roy, S.B.; Kar, I.N. Adaptive–Robust Control. of Euler–Lagrange Systems With Linearly Parametrizable Uncertainty Bound. IEEE Trans. Control Syst. Technol. 2018, 26, 1842–1850. [Google Scholar] [CrossRef]
- Huang, Y.J.; Kuo, T.C.; Chang, S.H. Adaptive sliding-mode control for nonlinear systems with uncertain parameters. IEEE Trans. Syst. Man Cybern. B Cybern. 2008, 38, 534–539. [Google Scholar] [CrossRef] [PubMed]
- Hung, J.Y.; Gao, W.; Hung, J.C. Variable Structure Control: A Survey. IEEE Trans. Ind. Electron. 1993, 40, 21. [Google Scholar] [CrossRef]
- Ma, H.; Wu, J.; Xiong, Z. Discrete-Time Sliding-Mode Control. with Improved Quasi-Sliding-Mode Domain. IEEE Trans. Ind. Electron. 2016, 63, 6292–6304. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, L.; Ke, Z.; Li, S. Nonlinear Speed Control. for PMSM System Using Sliding-Mode Control. and Disturbance Compensation Techniques. IEEE Trans. Power Electron. 2013, 28, 1358–1365. [Google Scholar] [CrossRef]
- Niu, Y.; Ho, D.W.C.; Wang, Z. Improved sliding mode control for discrete-time systems via reaching law. Control Theory Applic. 2010, 4, 2245–2251. [Google Scholar] [CrossRef]
- Su, W.C.; Drakunov, S.V.; Özgüner, Ü. An O(T2) boundary layer in sliding mode for sampled-data systems. IEEE Trans. Autom. Control 2000, 45, 482–485. [Google Scholar]
- Morgan, R.Ü.Ö. A decentralized variable structure control algorithm for robotic manipulators. IEEE J. Robot. Autom. 1985, 1, 8. [Google Scholar] [CrossRef]
- Roy, S.; Lee, J.; Baldi, S. A New Continuous-Time Stability Perspective of Time-Delay Control: Introducing a State-Dependent Upper Bound. Structure. IEEE Control Syst. Lett. 2019, 3, 475–480. [Google Scholar] [CrossRef]
- Qu, S.; Xia, X.; Zhang, J. Dynamics of Discrete-Time Sliding-Mode-Control. Uncertain Systems With a Disturbance Compensator. IEEE Trans. Ind. Electron. 2014, 61, 3502–3510. [Google Scholar] [CrossRef]
- Roy, S.; Roy, S.B.; Lee, J.; Baldi, S. Overcoming the Underestimation and Overestimation Problems in Adaptive Sliding Mode Control. IEEE/ASME Trans. Mechatron. 2019. [Google Scholar] [CrossRef]
- Roy, S.; Roy, S.B.; Kar, I.N. A New Design Methodology of Adaptive Sliding Mode Control for a Class of Nonlinear Systems with State Dependent Uncertainty Bound. In Proceedings of the 15th International Workshop on Variable Structure Systems (VSS), Graz, Austria, 9–11 July 2018. [Google Scholar]
- Sharma, N.K.; Roy, S.; Janardhanan, S. New design methodology for adaptive switching gain based discrete-time sliding mode control. Int. J. Control 2019. [Google Scholar] [CrossRef]
- Sharma, N.K.; Roy, S.; Janardhanan, S.; Kar, I.N. Adaptive Discrete-Time Higher Order Sliding Mode. IEEE Trans. Circuits Syst. II Express Br. 2019, 66, 4. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value | Fixed Speed Signal (μrad/s) | Sinusoidal Guidance (μrad/s) | Closed-loop Sweep | |||||
|---|---|---|---|---|---|---|---|---|
| Algorithms | RMS | Average | Maximum | RMS | Average | Maximum | Closed-loop Bandwidth | Resonance Peak |
| PID | 8.3 | 6.5 | 37.3 | 13.7 | 9.9 | 4.6 | 9.05Hz | 8.05dB |
| Ref. [22] | 2.9 | 2.3 | 10.5 | 2.8 | 2.4 | 15.6 | 8.7Hz | 3.87dB |
| Proposed | 1.5 | 1.2 | 6.9 | 2.3 | 2.1 | 8.1 | 9.85Hz | 1.41dB |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Liu, Y.; Gao, S.; Han, C. Control Technology of Ground-Based Laser Communication Servo Turntable via a Novel Digital Sliding Mode Controller. Appl. Sci. 2019, 9, 4051. https://doi.org/10.3390/app9194051
Zhang J, Liu Y, Gao S, Han C. Control Technology of Ground-Based Laser Communication Servo Turntable via a Novel Digital Sliding Mode Controller. Applied Sciences. 2019; 9(19):4051. https://doi.org/10.3390/app9194051
Chicago/Turabian StyleZhang, Jianqiang, Yongkai Liu, Shijie Gao, and Chengshan Han. 2019. "Control Technology of Ground-Based Laser Communication Servo Turntable via a Novel Digital Sliding Mode Controller" Applied Sciences 9, no. 19: 4051. https://doi.org/10.3390/app9194051
APA StyleZhang, J., Liu, Y., Gao, S., & Han, C. (2019). Control Technology of Ground-Based Laser Communication Servo Turntable via a Novel Digital Sliding Mode Controller. Applied Sciences, 9(19), 4051. https://doi.org/10.3390/app9194051