1. Introduction
Augmented reality is a technique of rendering a virtual object on a real image captured through a camera, and has the advantage of providing a sense of reality that is different from virtual reality. Recently, many augmented reality contents are being released due to the development of various augmented reality platforms (Vuforia, AUGMENT, et al.) and libraries (ARKit, ARCore, Maxst, et al.) [
1,
2,
3]. Also, while Microsoft Hololens and Epson Moverio, which are dedicated hardware for augmented reality, have been unveiled, they are still unable to provide high-performance, due to low computing power [
4,
5].
Figure 1 shows Microsoft Hololens and Epson Moverio. Augmented reality is used in various fields, such as tourism, medical care, performance, education, and games. The AR technologies in particular have been actively applied to the fields of games and education.
Augmented reality in the education field has been actively researched since the 2000s, and many research results have been derived from both industrial and academic fields. Augmented reality content has the feature that users can directly interact with augmented 3D objects in the real world. Therefore, when providing AR-based educational content, learners can enjoy a more realistic and immersive experience than when using books or image-based education content. Especially in the field of education, physics can provide more realistic expressions through various physics-based simulation techniques, which enable students to gain high achievement.
Numerous studies have been carried out to express motion in the real world through physics-based simulation, such as free fall, parabolic motion, and comparison of changes according to object characteristics. However, it is difficult to apply AR-based physics simulation to education, because of the low computing power of the educational system. To solve this problem, we have developed a real-time simulator for the augmented reality environment based on lightweight physics simulation technology using parallel processing. The developed physical simulator simulates a deformable object for realistic presentation, and provides a form of the object in different shapes, according to various physical characteristics. We use Microsoft’s Kinect v2 as hardware to provide the augmented reality, and the device has the advantage that it can later be converted to Microsoft Hololens V2.
The rest of the paper is organized as follows.
Section 2 of this paper describes the research trends of augmented reality education content, and analyzes the physics education content in detail.
Section 3 describes the design of the augmented reality simulator used in this paper, while
Section 4 describes the implementation results of our content.
Section 5 concludes the paper.
2. Related Works
2.1. Optical See-Through and Video See-Through
The techniques used in augmented reality are typically divided into optical see-through, and video see-through [
6,
7].
Figure 2 shows that the optical see-through system can simultaneously view the images rendered by the graphics system while viewing the real world through the optical combiner.
At this time, a marker-based AR for recognizing a marker through a camera or a non-marker recognition AR using a camera and a sensor outputs a virtual object to the optical synthesizing lens, after processing through the device’s graphics system. The video see-through system is a method of acquiring real-world information by using one or more cameras as shown in
Figure 3, synthesizing the information with the virtual information using the graphic system, and transmitting the information through the display. Most video see-through systems have the advantage of high-quality resolution and wide viewing angle, because they depend on the performance of the connected computer, not the stand-alone system. However, because of the way the camera displays information, there is a high probability of causing 3D nausea. On the other hand, most optical see-through systems are stand-alone devices with their built-in computer, which is specialized in portability and activity.
The computing power of the optical see-through system is somewhat lower than that of the video see-through system based on the conventional desktop connection. However, it can be used while looking at the real world without the video camera. Therefore, when choosing the augmented reality implementation method, it is appropriate to select the video see-through method if the performance effectiveness is more important, or optical see-through method if the realistic visualization of the real world is more important.
2.2. AR with Physics Simulation
According to Chae et al., the research of physics simulation in the AR field is being carried out for the various purposes, such as expression of a virtual fluid in an augmented reality environment, a simulation of augmented reality ceramic production. Among them, several papers in the field of augmented reality physics simulation were reviewed [
8]. Fujisawa et al. proposed a method of representing virtual fluid in the augmented reality environment. Smoothed Particle Hydrodynamics (SPH), a particle-based fluid simulation, was used to represent the realistic motion of the fluid, and marker-based augmented reality technology was applied. The simulation has the limitation that the marker is limited, and realistic simulation is difficult since the SPH method has low accuracy [
9]. Leotta et al. have been working on creating 3D models automatically using non-aligned images. They created a 3D model by putting a virtual object on the screen representing the real world, and implemented the simulation of the interaction between the real object and the virtual object. The system provides many viewpoints to provide users with various simulation results, but the whole system performance depends on the amount of scene on the screen [
10].
2.3. Real-Time Physics Simulation
Recently, a number of studies have been carried out to improve the performance of the real-time soft body simulation in the CPU environment and the GPU environment. Wang and Yang have developed a step length adjustment, initialization, and reversibility model conversion technique using GPU computing method to improve the performance of a deformed object simulator. In this case, the parallel processing algorithm was designed to reconsider memory efficiency, and the performance was improved by about 400 times using the GPU, compared to using the CPU [
11]. Wang et al. presented an optimization method for high-resolution cloth simulation, and showed better performance for Newton’s method and the projection dynamics method [
12]. Our previous study evaluated the simulation performance of the CPU environment and the GPU environment through the experiment of freely dropping several 3D spheres, and showed that the performance of the GPU parallel processing environment is improved by about 84% [
13,
14].
For research on augmented reality using physics simulation, which is currently being researched and applied in a limited content, we are developing a novel augmented reality system of high performance using a video see-through method and a real-time physics simulator based on parallel processing using GPU.
3. System Information
In this section, we describe the configuration of the augmented reality environment and the real-time physics simulator for educational content. First, we describe the whole flow of the system proposed and implemented in this paper. We then describe the implementation method of each component constituting our system.
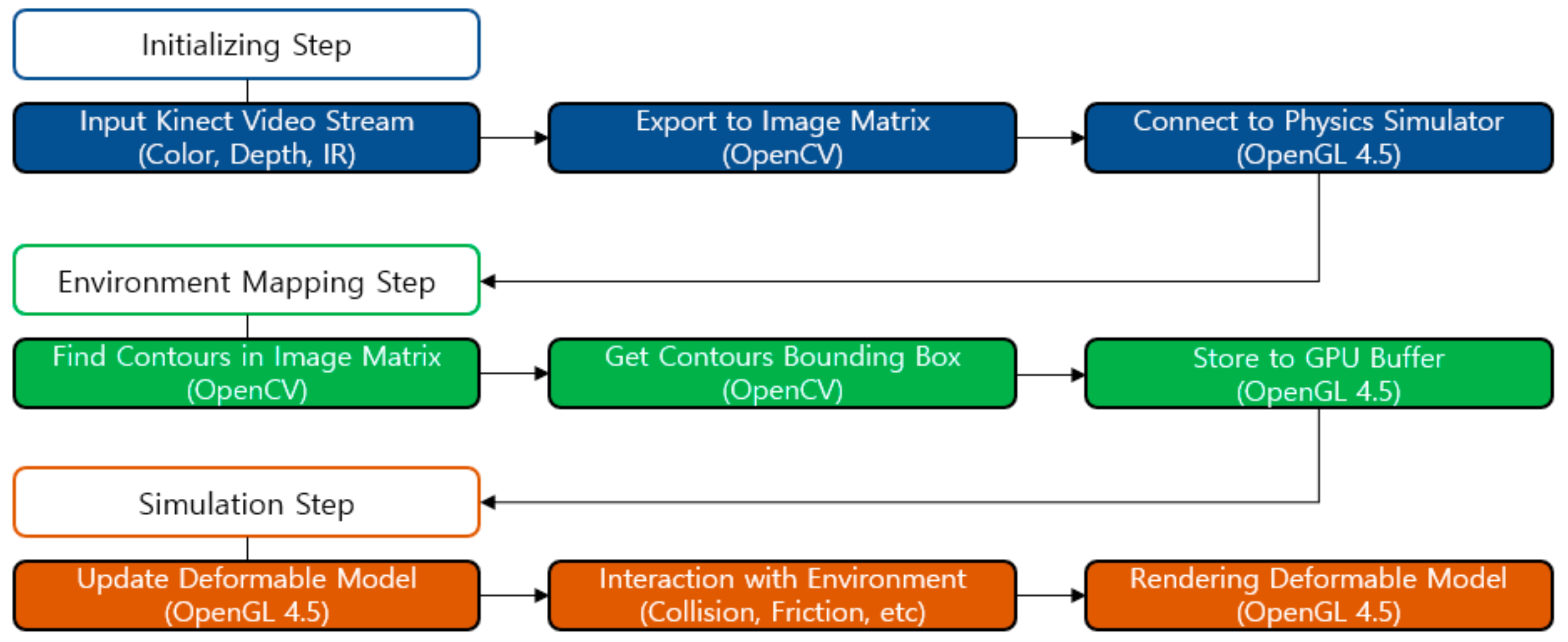
3.1. System Flow
The real-time augmented reality simulator for physics education is performed through the following system flow shown in
Figure 4:
Our system is divided into the initialization step → environment mapping step → simulation step sequence. In the initialization step, Kinect’s video stream (color, depth, IR) is input for the augmented reality environment configuration. The received color and depth images have different resolutions, making it difficult to estimate the information in the environment mapping stage. To do this, the color and depth streams are calibrated in the initialization step. Then, each image is composed of an image matrix for each frame, and is connected to the physics simulator. The connected image matrix is used as a background for the augmented reality environment. In the environment mapping step, we use OpenCV, an image processing library, to extract meaningful information for interaction between the augmented object and the real world. First, in the step, all rectangles are found in the matched frame-specific image matrix. The rectangle is stored in the GPU buffer in the form of an Axis Aligned Bounding Box (AABB), which is one of the bounding boxes for smooth collision handling. After the initialization step and environment mapping step are performed, object characteristics are set, and then the real-time simulation is performed, and interaction with the collision point of the detected real environment is performed.
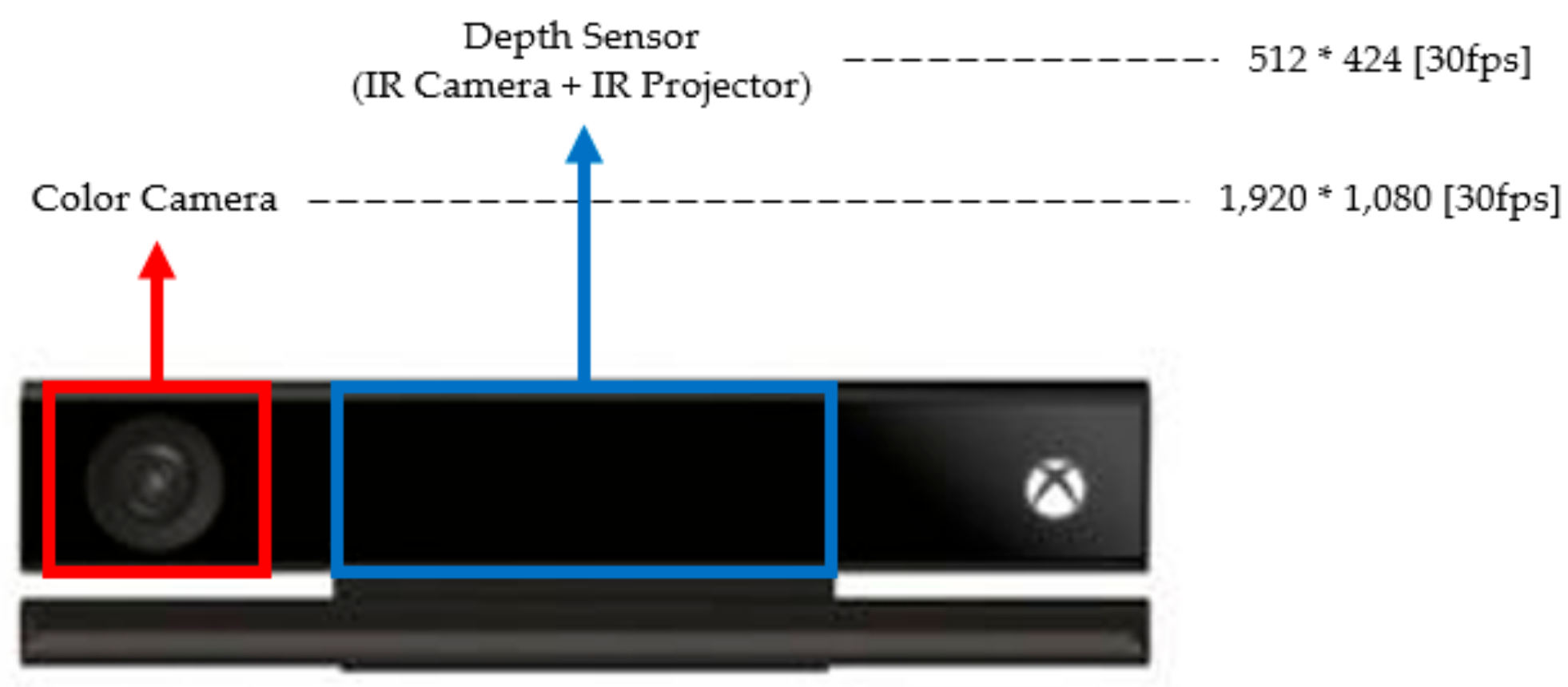
3.2. Augmented Reality Environment Setup with Kinect V2
In this paper, we use a video see-through method to construct an augmented reality environment. We used Microsoft Kinect V2 camera for this purpose. Kinect V2 has the advantage of being able to simultaneously capture a color image, depth image, and IR image through multiple cameras, but calibration is required separately for analysis, using sensors of different resolutions [
15].
Figure 5 shows the hardware configuration and information for Microsoft Kinect V2.
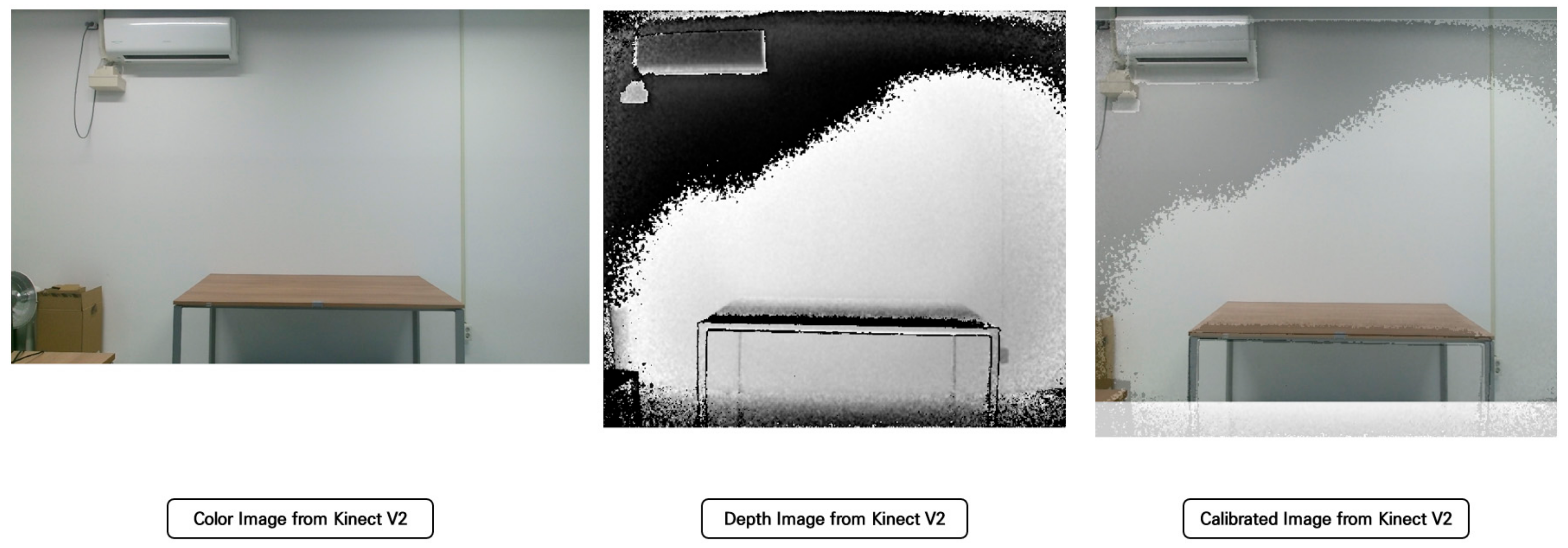
The image input through the color camera has a resolution of (1920 × 1080), but the image input through the depth sensor has a resolution of (512 × 424). We performed image calibration through the following algorithm for the analysis of two different images. The following
Table 1 and
Figure 6 show the image calibration algorithm and the result of our method:
We derived the Calibrated Image Matrix from the matching algorithm, and analyzed the image of the matrix to extract meaningful information. Significant information, such as a desk or wall that can interact with the enhanced object, was detected in this study. The contours detection method provided by the image processing library OpenCV was used to detect (x, y) coordinates and (z) coordinates in the color image matrix, and to group them into one bounding box form. The information was then stored in the GPU buffer of the physics simulator to interact with the augmented object.
Figure 7 shows the results of detecting squares using image processing from a video frame.
3.3. Real-Time Physics Simulator
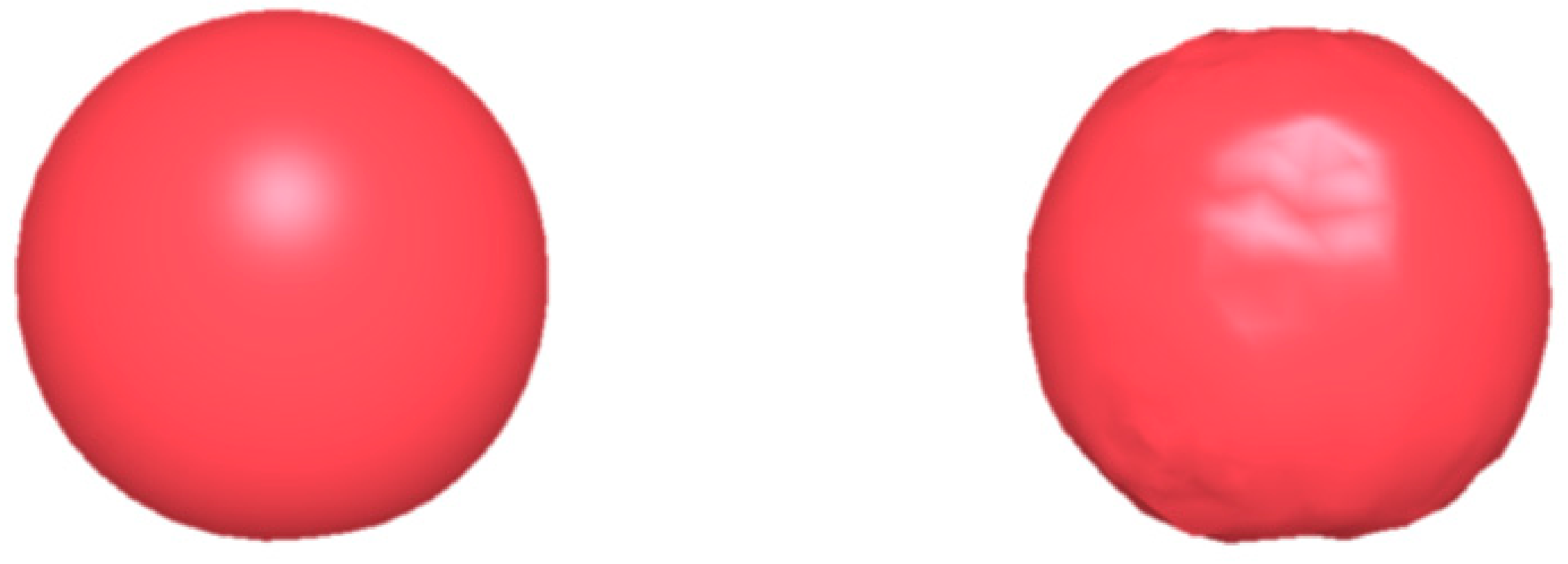
The physical simulator is divided into a rigid body simulator whose shape does not change when the force is applied, and a soft body simulator whose shape does change. The model on the left in
Figure 8 shows after the collision of the rigid body, and the model on the right shows after the collision of the soft body.
The rigid body simulator has the advantage that the simulation speed is fast; however, the reality is low. The soft body simulator has the advantage of showing realistic motion; however, the simulation speed is slow. While most of the augmented reality content that performs simple augmentation uses rigid body simulators, it is preferable to use soft body simulators for content for physics education. Therefore, we developed a soft body simulator that can simulate real-time simulations, and applied it to augmented reality systems.
To perform soft body simulation, most researchers adopt deformation computing methods, such as the Finite Element Method (FEM), Mass Spring System (MSS), and Position Based Dynamics (PBD).
Table 2 shows the advantages and disadvantages of each calculation method [
17,
18,
19]:
FEM is chosen if precise simulation accuracy is required, while PBD is chosen if relatively fast speeds and inaccurate simulation accuracy are required. Without this extreme situation, most researchers choose MSS to perform soft body simulation. We implemented a soft body simulator by selecting MSS, which is a method of guaranteeing simulation accuracy and speed.
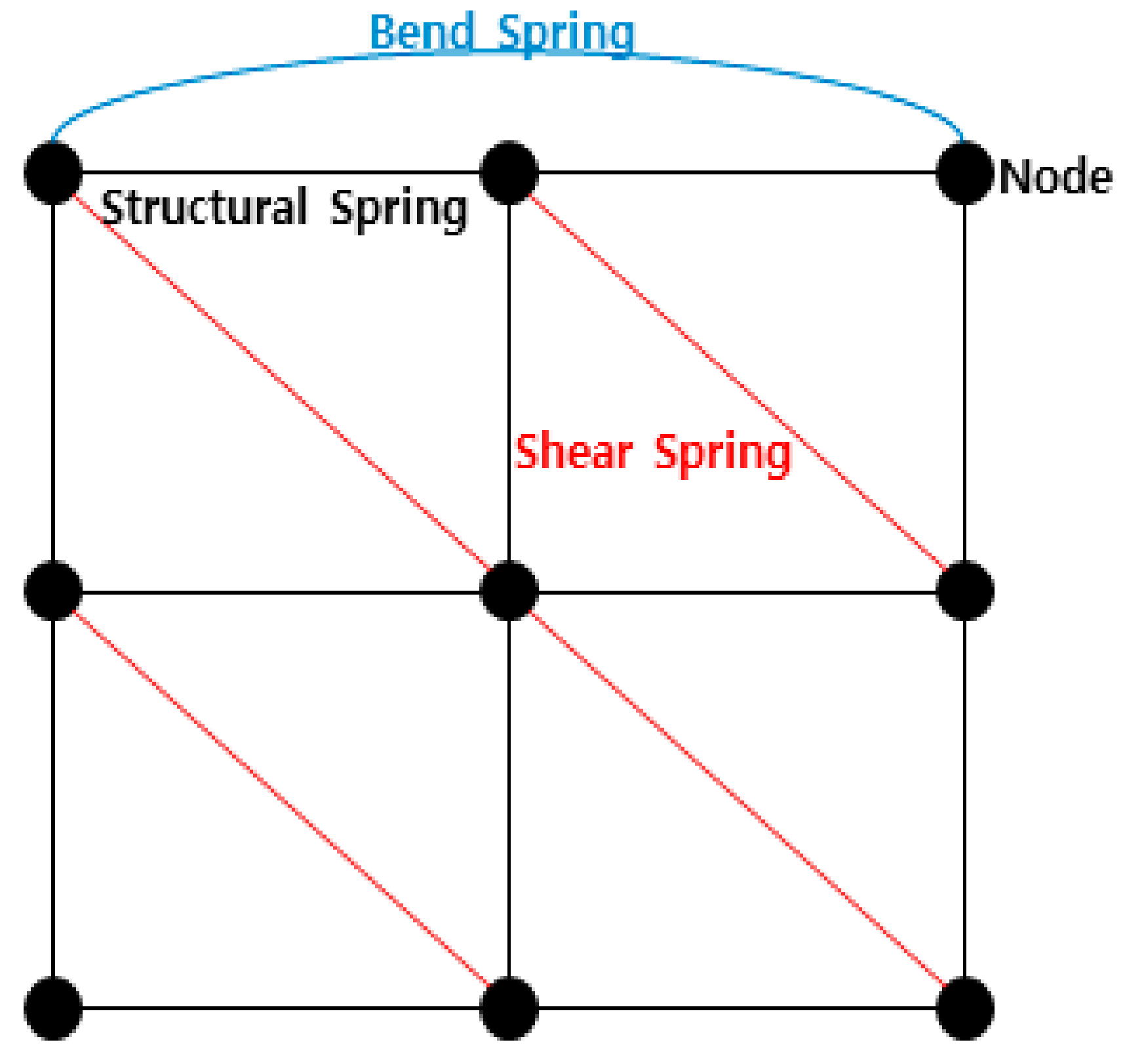
The MSS has the structure shown in
Figure 9, in a way that the object is constituted by a point (node) having a mass and an imaginary line (spring) connecting it. When constructing a cloth model, all spring structures are used, but when constructing a volume model, only a structural spring is used.
The MSS consists of a node and three springs (Structural, Shear, and Bend), and each component has the following data. The node has mass, position, velocity, and force basic data for each point. The spring has an initial length (RestLength), associated with the number of two connected nodes (Index1 & Index2), a spring constant (Ks), and a damping constant (Kd) representing the characteristics of the spring as basic data. The MSS calculates the spring force through Hooke’s Law based on the information of the node and the spring to express the strain. The force of the spring is used as an intermediary for tracing the position of the object through various numerical integration methods, such as the implicit Euler method, or the 4th order Runge–Kutta method. The deformation of the soft body is finally calculated through the prediction of the position of the object. Our soft body simulator satisfies at least 60 fps, and satisfies the constraints even when it performs in the augmented reality environment.
In this paper, we implemented a real-time MSS based on GPU parallel processing in the environment shown in
Table 3.
4. Implementation of the AR System
We implemented a real-time augmented reality physics simulator by combining the components described above. Through the implemented simulator, we simulated various objects with unique material properties. Our simulation models were generated by volume mesh model with sphere and torus shape using tetgen, a mesh generator. The following
Table 4 shows the result of the wireframe rendering of volume mesh generated through tetgen [
21]:
In this research, the generated mesh models were simulated with a soft body simulator, and combined with an image system based on kinect v2 for augmented reality. First, we combined the real-time video stream with the soft body simulator for that. The following
Figure 10 shows the combined result of kinect V2 and our soft body simulator:
Second, we created several objects with various material properties, and experimented with changes in object motion through simulation. The properties of various objects are expressed through the changes of the constant (
Ks) and damping (
Kd) of the object.
Ks is information that indicates the rigidity of an object, and even if it has the same outer shape, the force to maintain its shape becomes close to a rigid object when the value of
Ks is large.
Kd is the damping ratio that represents the attenuation of the force that causes the deformation of the object, which causes the object to stop, without moving forever. We also added frictional forces to the environment, to allow for more realistic movements to our system. The following
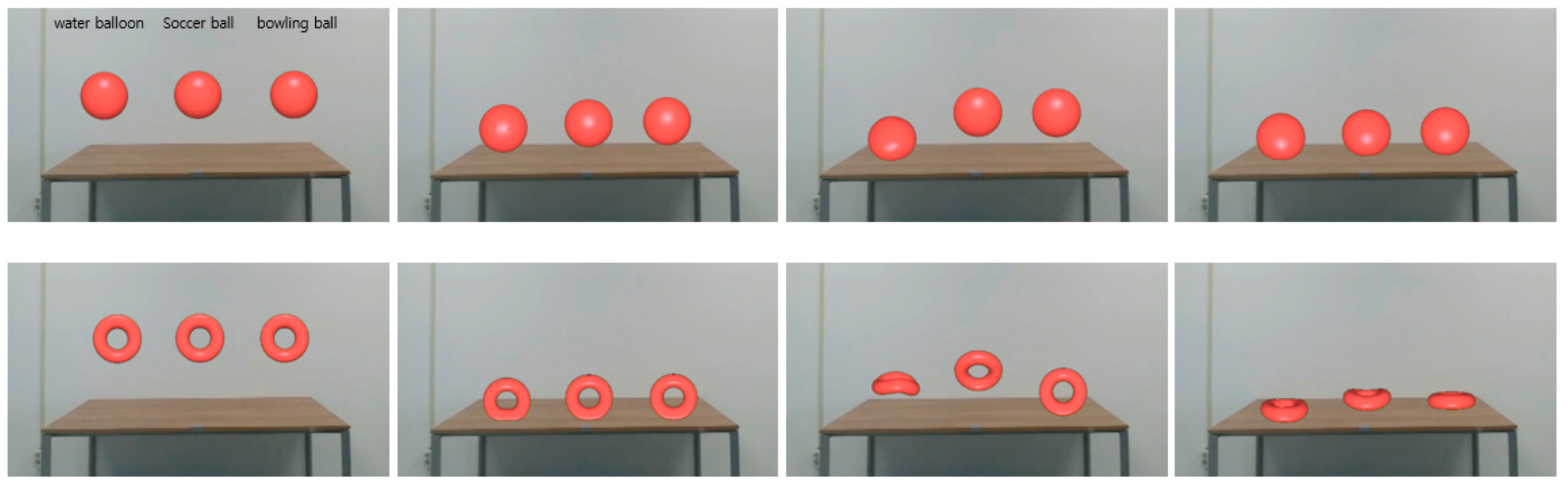
Figure 11 shows the simulation results of different objects implemented through our system. We conducted an experiment, scene 1, that identifies differences in simulation results by applying different material properties, and an experiment, scene 2, that identifies differences in simulation results by applying different external forces.
We applied a water balloon, soccer ball, and bowling ball material to the sphere model by adjusting the material properties of each object. As a result of performing scene 1, we can see that the result of the simulation changes when different material properties are applied. The results of experiment 2 confirm that the deformation and the behavior of the object are different when different external forces are applied to the object having the same material properties. We applied external forces to the top of each of the three balls, and we compared the ball bouncing off the invisible wall. In the case of a stronger external force, the simulation was performed at high speed and the deformation was greater. Each snapshot in
Figure 12 was taken every 1000 frames.
Finally, we conducted a survey to provide simulators to 10 students to teach physics, and to verify the educational effectiveness and responsiveness of the proposed system.
Table 5 shows the items of our survey. We provided a total of five multiple-choice questions and two short-answer questions, and all students responded to the questionnaire [
22].
The results of the survey’s multiple-choice question are shown in the
Figure 13.
Q1 and Q2 were answered most positively. However, there was a negative opinion that the Q5 would be difficult to use, because it required high specification and additional equipment. After conducting a short answer question, various opinions on the improvement of our system were presented. There were positive feedbacks such as “I wish I could simulate various 3D objects” and “I wish I could make the simulation lighter and provide it on mobile.”. Most of the answers to the Q6 were that mobile AR devices will be effective when commercialized.
5. Discussion and Conclusions
This research proposes a system that can provide more flexible educational content by providing real-time simulation technology for physics education, which is currently limited. We proposed physics education content by combining existing image processing technologies and our real-time soft body simulation technology. That system is implemented using Microsoft’s Kinect v2, and has adopted the video see-through method. Augmented 3d model interaction with the real environment is possible by using basic image processing algorithms, such as a square detection algorithm.
After providing the simulator to 10 students who were learning to teach physics, the results of the questionnaire showed that 93% (28/30) of the respondents answered that the simulator will be helpful for physics education. The students surveyed commented that they expected to be more immersed and more focused through physics education using our simulator, than using a book and video. However, Q3 and Q5 had many negative answers compared to other questions. In particular, many commented that a limited environment should be created for augmented reality, and that it did not increase the realism much compared to books and videos. As a result of our survey, our simulator has the merit of providing more realistic representation than previous research, which will be helpful for education; however, it also has the disadvantage that it provides only a limited environment. For that, we want to provide more accessible content using high-end AR devices, such as Microsoft’s Hololens V2, with the same image input mechanism. This research shows the result of the pilot research for this purpose. In future work, we plan to carry out research on the technology of providing physics simulation through the stand-alone AR device.
Author Contributions
M.H. provided conceptualization, project administration, and edited and reviewed the manuscript. N.-J.S. designed and implemented the software, and wrote the original draft. Y.-J.C. provided conceptualization and edited the manuscript. J.M. curated the data, and also wrote the original draft.
Acknowledgments
This work was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF-2017R1D1A1B03035718), funded by the Ministry of Education, and was supported by the Soonchunhyang University Research Fund.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Cheng, X.; Lifeng, Z. Implementation of mobile augmented reality based on Vuforia and Rawajali. In Proceedings of the IEEE 5th International Conference on Software Engineering and Service Science, Beijing, China, 27–29 April 2014. [Google Scholar]
- AUGMENT. Available online: https://www.augment.com/ (accessed on 25 September 2019).
- Jonathan, L.; Babilinski, K. Augmented Reality for Developers: Build Practical Augmented Reality Applications with Unity, ARCore, ARKit, and Vuforia; Packt Publishing Ltd.: Birmingham, UK, 2017. [Google Scholar]
- Mircrosoft Hololens. Available online: https://www.microsoft.com/en-us/hololens (accessed on 29 July 2019).
- Epson Moverio. Available online: https://moverio.epson.com/ (accessed on 25 September 2019).
- Sunar, M.S.; Zamri, M.N.B. Advances in Computer Graphics and Virtual Environment; Univision Press: Selangor Darul Ehsan, Malaysia, 2008. [Google Scholar]
- Silva, R.; Oliveira, J.C.; Giraldi, G.A. Introduction to Augmented Reality; National Lavoratory for Scientific Computation: Petrópolis, Brasil, 2003. [Google Scholar]
- Chang-Hun, C.; Go, G.-W. Applying Physics Simulation to Increase Immersion Experience in Augmented Reality. Korea Multimed. Soc. 2009, 13, 21–33. [Google Scholar]
- Fujisawa, F.; Kato, H. Interactive Fluid Simulation Using Augmented Reality Interface; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Leotta, M.; Boyle, K. Plausible physics in augmented images. In Proceedings of the ACM SIGGRAPH 2005 Posters, Los Angeles, CA, USA, 31 July–4 August 2005. [Google Scholar]
- Wang, H.; Yang, Y. Descent methods for elastic body simulation on the GPU. ACM Trans Graph. 2016, 35. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, L.; Fratarcagneli, M.; Tang, M.; Wang, H. Parallel Multigrid for Nonlinear Cloth Simulation. Comp. Graph. Forum 2018, 37, 131–141. [Google Scholar] [CrossRef]
- Sung, N.-J.; Hong, M.; Lee, S.-H.; Choi, Y.J. Simulation of Deformable Objects using GLSL 4.3. KSII Trans. Internet Inf. Syst. 2017, 11, 8. [Google Scholar] [CrossRef]
- Sung, N.-J.; Transue, S.; Kim, M.S.; Choi, Y.J.; Hong, M. Optimization of Material Properties for Coherent Behavior across Multi-resolution Cloth Models. KSII Trans. Internet Inf. Syst. 2018, 12, 4072–4089. [Google Scholar]
- Peng, Y.; Liu, Y.; Lu, K.; Zhang, M. Single Pixel Compressive Camera for Fast Video Acquisition using Spatial Cluster Regularization. KSII Trans. Internet Inf. Syst. 2018, 12, 5481–5495. [Google Scholar]
- Zhang, Z. Microsoft kinect sensor and its effect. IEEE Multimed. 2012, 19, 4–10. [Google Scholar] [CrossRef]
- Allard, J.; Courtecuisse, H.; Faure, F. Implicit FEM Solver on GPU for Interactive Deformation Simulation; GPU Computing Gems Jade Edition; Morgan Kaufmann: Bulington, MA, USA, 2012; pp. 281–294. [Google Scholar]
- Vassilev, T.; Spanlang, B. A mass-spring model for real time deformable solids. In Proceedings of the International Symposium in East West Vision, Graz, Austria, 12–13 September 2002. [Google Scholar]
- Müller, M.; Heidelberger, B.; Hennix, M.; Ratcliff, J. Position based dynamics. J. Vis. Commun. Imag. Represent. 2007, 18, 109–118. [Google Scholar] [CrossRef]
- Sung, Na.; Choi, Yo.; Hong, M. Parallel Structure Design Method for Mass Spring Simulation. J. Korea Comput. Graph. Soc. 2019, 25, 55–63. [Google Scholar] [CrossRef]
- Si, H. TetGen, a Delaunay-based quality tetrahedral mesh generator. ACM Trans. Math. Softw. 2015, 41, 2. [Google Scholar] [CrossRef]
- Lee, J.-A.; Choi, J.-O. Making Content of the Science Education for the Element Schoolchildren based on the AR (Augmented Reality). J. Korea Content Assoc. 2011, 11, 514–520. [Google Scholar] [CrossRef]
Figure 1.
Recent Augmented Reality Devices (Left: Microsoft Hololens, Right: Epson Moverio).
Figure 1.
Recent Augmented Reality Devices (Left: Microsoft Hololens, Right: Epson Moverio).
Figure 2.
System Scenario of the Optical See-Through Method.
Figure 2.
System Scenario of the Optical See-Through Method.
Figure 3.
System Scenario of the Video See-Through Method.
Figure 3.
System Scenario of the Video See-Through Method.
Figure 4.
System Flow of the Real-Time Augmented Reality Physics Simulator.
Figure 4.
System Flow of the Real-Time Augmented Reality Physics Simulator.
Figure 5.
Microsoft Kinect V2’s Hardware Structure Information (Resolution, Frame per Second (FPS)).
Figure 5.
Microsoft Kinect V2’s Hardware Structure Information (Resolution, Frame per Second (FPS)).
Figure 6.
Result of Method (Left: Color Image, Middle: Depth Image, Right: Calibrated Image).
Figure 6.
Result of Method (Left: Color Image, Middle: Depth Image, Right: Calibrated Image).
Figure 7.
Find Squares in Video Frame (for Interacting with Physics Model).
Figure 7.
Find Squares in Video Frame (for Interacting with Physics Model).
Figure 8.
Behavior Comparison (Left: Rigid Body, Right: Soft Body).
Figure 8.
Behavior Comparison (Left: Rigid Body, Right: Soft Body).
Figure 9.
Structures of MSS (Node, Structural Spring, Shear Spring, Bend Spring) [
20].
Figure 9.
Structures of MSS (Node, Structural Spring, Shear Spring, Bend Spring) [
20].
Figure 10.
Combined Result of Kinect Video Stream and Our Soft Body Simulator.
Figure 10.
Combined Result of Kinect Video Stream and Our Soft Body Simulator.
Figure 11.
Result of Simulation Scene 1 (Freefall Simulation: Sphere and Torus Model).
Figure 11.
Result of Simulation Scene 1 (Freefall Simulation: Sphere and Torus Model).
Figure 12.
Result of Simulation Scene 2 (Apply difference External Force, Same Material Properties: Soccer Ball with movement trajectory).
Figure 12.
Result of Simulation Scene 2 (Apply difference External Force, Same Material Properties: Soccer Ball with movement trajectory).
Figure 13.
Result of the Survey.
Figure 13.
Result of the Survey.
Table 1.
Color and Depth Image Matrix Calibration Algorithm for Image Analysis [
16].
Table 1.
Color and Depth Image Matrix Calibration Algorithm for Image Analysis [
16].
| Image Calibration Algorithm. |
|---|
Input: Color Image Matrix, Depth Image Matrix
Output: Calibrated Image Matrix |
//Preprocessing for Calibration
undistort color, depth image
create Calibrated Image Matrix for store calibration image [Depth.row * Depth.col]
//Calibration Method (Loop Equation to Mapping Color & Depth Image)
for y = 0, y < Depth.row, y++
for x = 0, x < Depth.col, x++
float DepthValue = Depth(y,x) //get row, col depth value
vec3f DepthCoord = DepthToW(y, x, DepthValue) //create depth coordinate
vec2i ColorCoord = wToColor(DepthCoord) //depth coordinate to color coordinate
//Store color coordinate data to Calibrated Image Matrix (y,x)
Calibrated Image Matrix (y,x) = Color Image Matrix (ColorCoord[0], ColorCoord[1]) |
Table 2.
Comparison of Each Calculation’s Advantages and Disadvantages (low, mid, high).
Table 2.
Comparison of Each Calculation’s Advantages and Disadvantages (low, mid, high).
| | FEM | MSS | PBD |
|---|
| Simulation Speed | low | mid | mid |
| Simulation Accuracy | high | mid | low |
Table 3.
Development Environment (Real-Time Physics Simulator).
Table 3.
Development Environment (Real-Time Physics Simulator).
| NAME | DESCRIPTION |
|---|
| CPU | Intel i7 7700 3.60 GHz: 8 Core |
| GPU | Nvidia GeForce GTX 1080Ti |
| RAM | 32 GB |
| V-RAM | 11 GB |
| Library | OpenGL GLSL 4.3, OpenCV 2.4.9, Kinect V2 |
| IDE | Visual Studio 2013 Ultimate |
Table 4.
Result of Generate Volume Mesh Model.
Table 4.
Result of Generate Volume Mesh Model.
| Information | Wireframe Rendering |
|---|
| SPHERE |  |
| NODE | 1.3 K |
| FACE | 2.1 K |
| SPRING | 25 K |
| TORUS |  |
| NODE | 2 K |
| FACE | 1.4 K |
| SPRING | 62 K |
Table 5.
Our Survey Items (5 Multiple-Choice Questions [score 1: negative, 2: moderate, 3: positive], 2 Short-Answer Questions [doesn’t have score]).
Table 5.
Our Survey Items (5 Multiple-Choice Questions [score 1: negative, 2: moderate, 3: positive], 2 Short-Answer Questions [doesn’t have score]).
| Number | Question Detail |
|---|
| Multiple-Choice Question |
| Q1 | I have encountered augmented reality. |
| Q2 | It is more interesting than a general book and video. |
| Q3 | There was a sense of reality. |
| Q4 | It is likely to help physics learning. |
| Q5 | I want to download and apply the simulator right now. |
| Short-Answer Question |
| Q6 | What impact do you think AR technology can have on physics education? |
| Q7 | Are there any improvements to our system? |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

