The Complex Dynamic Locomotive Control and Experimental Research of a Quadruped-Robot Based on the Robot Trunk

Abstract
:Featured Application
Abstract
1. Introduction
2. The Modeling of the Hydraulic Quadruped Robot
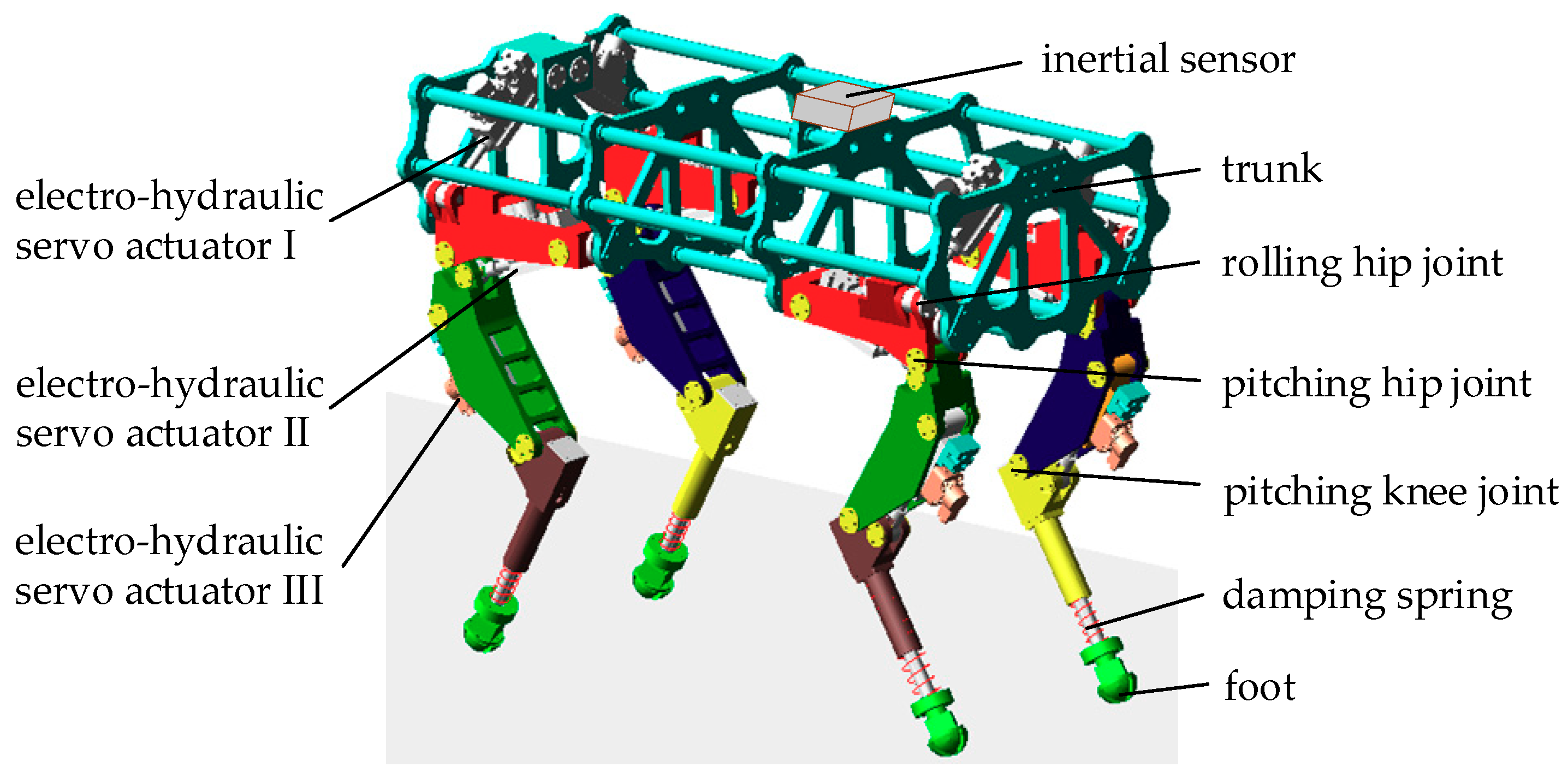
2.1. The Mechanical Structure of the Hydraulic Quadruped Robot
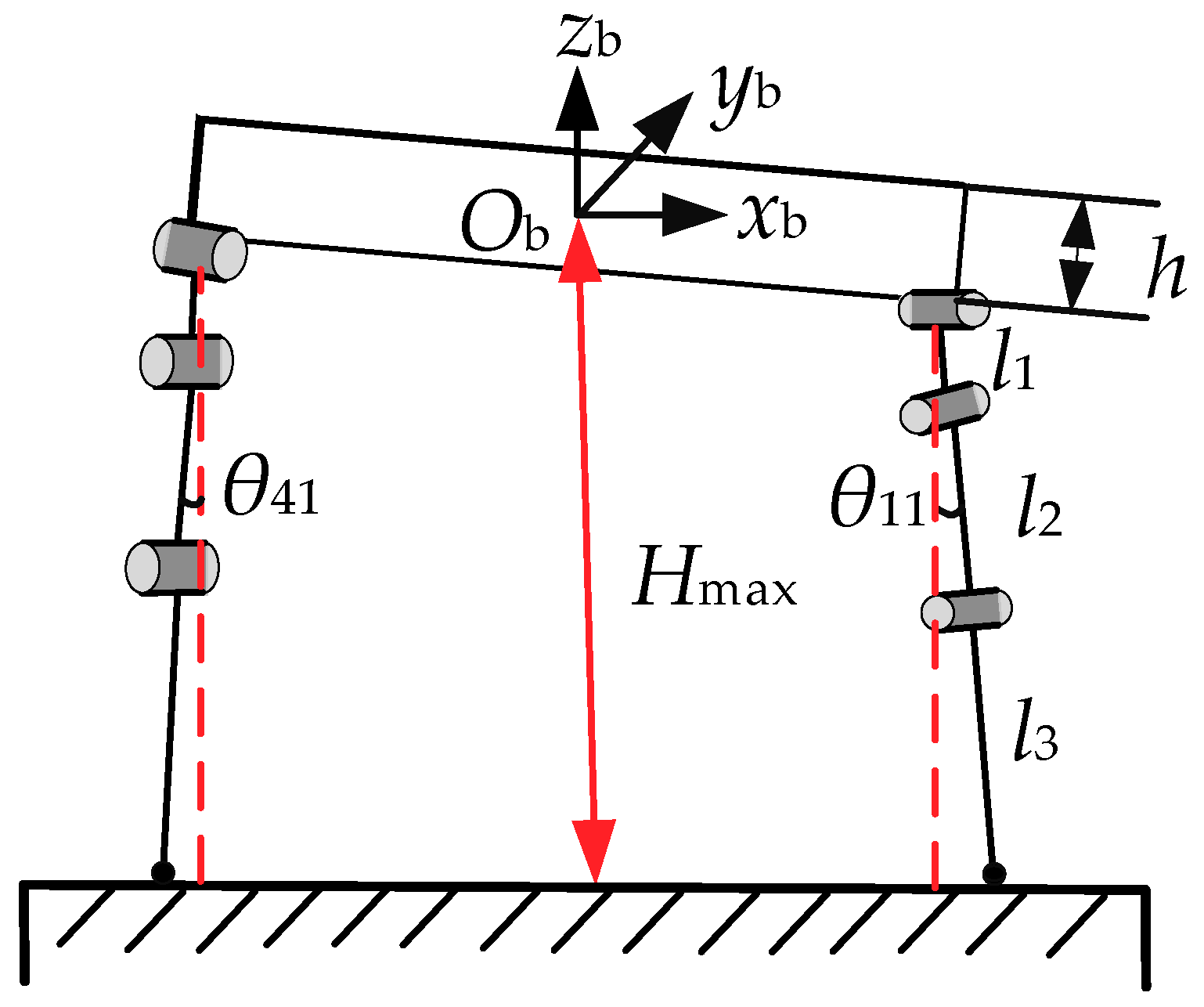
2.2. Kinematic Modeling
3. Trajectory Planning for Quadruped Robot
3.1. Trajectory Generation of Trunk Centroid
3.1.1. Horizontal Position Planning of Robot Trunk
3.1.2. Vertical Position Planning of Robot Trunk
3.2. Foot Trajectory Planning of Quadruped Robot
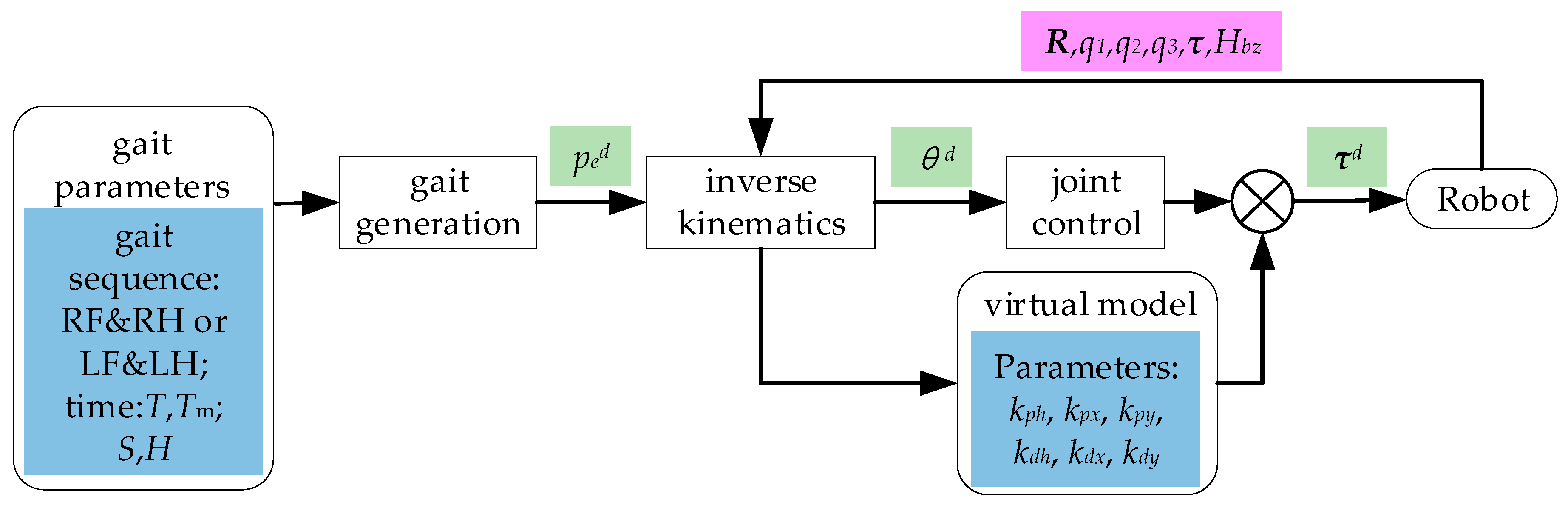
4. The Control Algorithm for a Hydraulic Quadruped Robot
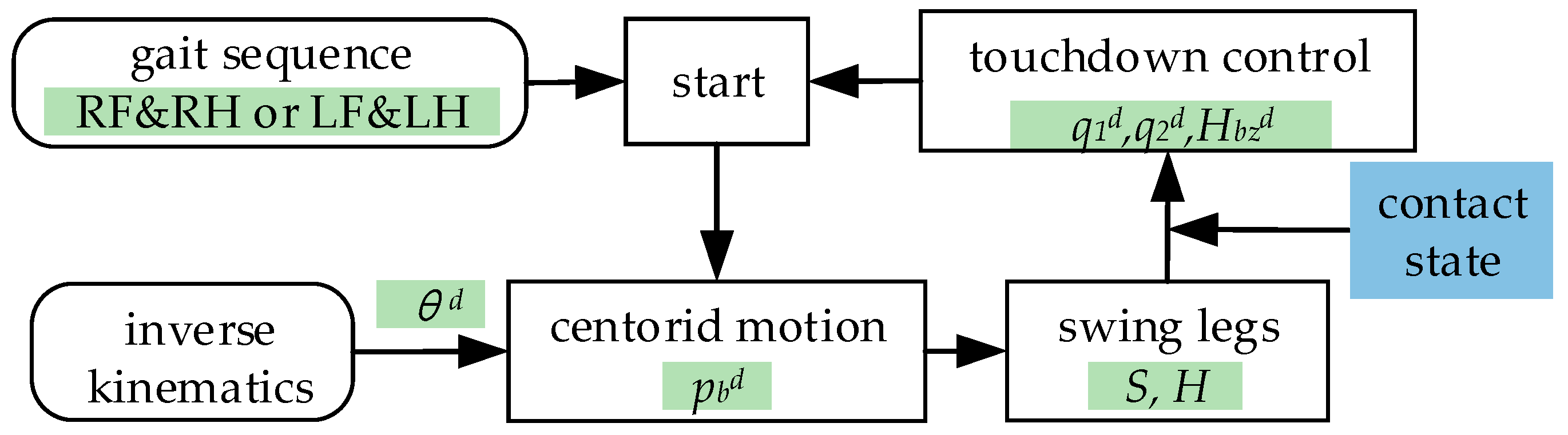
4.1. Centroid Control in Touchdown Stage
4.2. The Design of a Centroid-Based Controller
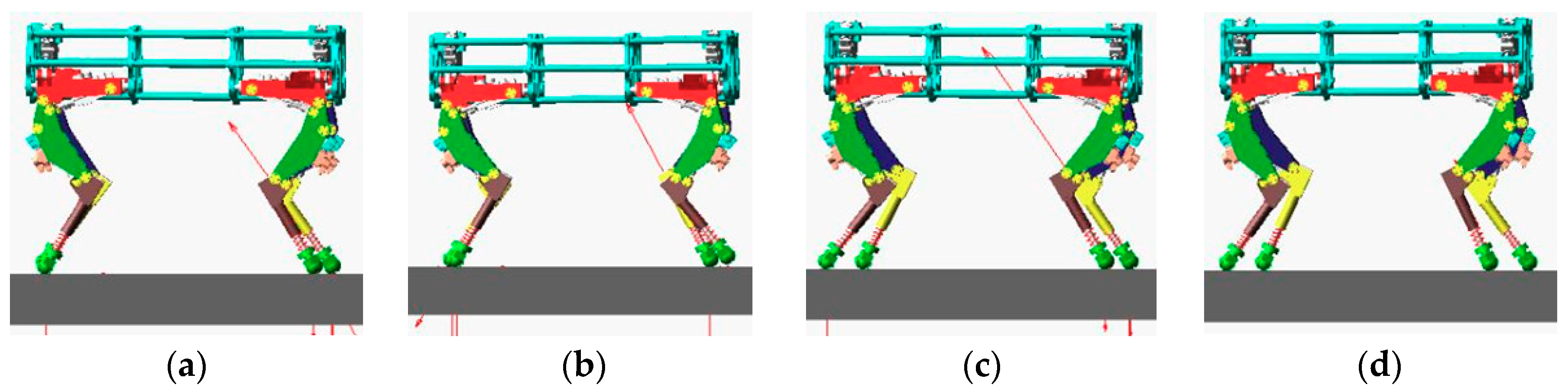
5. Simulation and Analysis
5.1. Simulation Environment
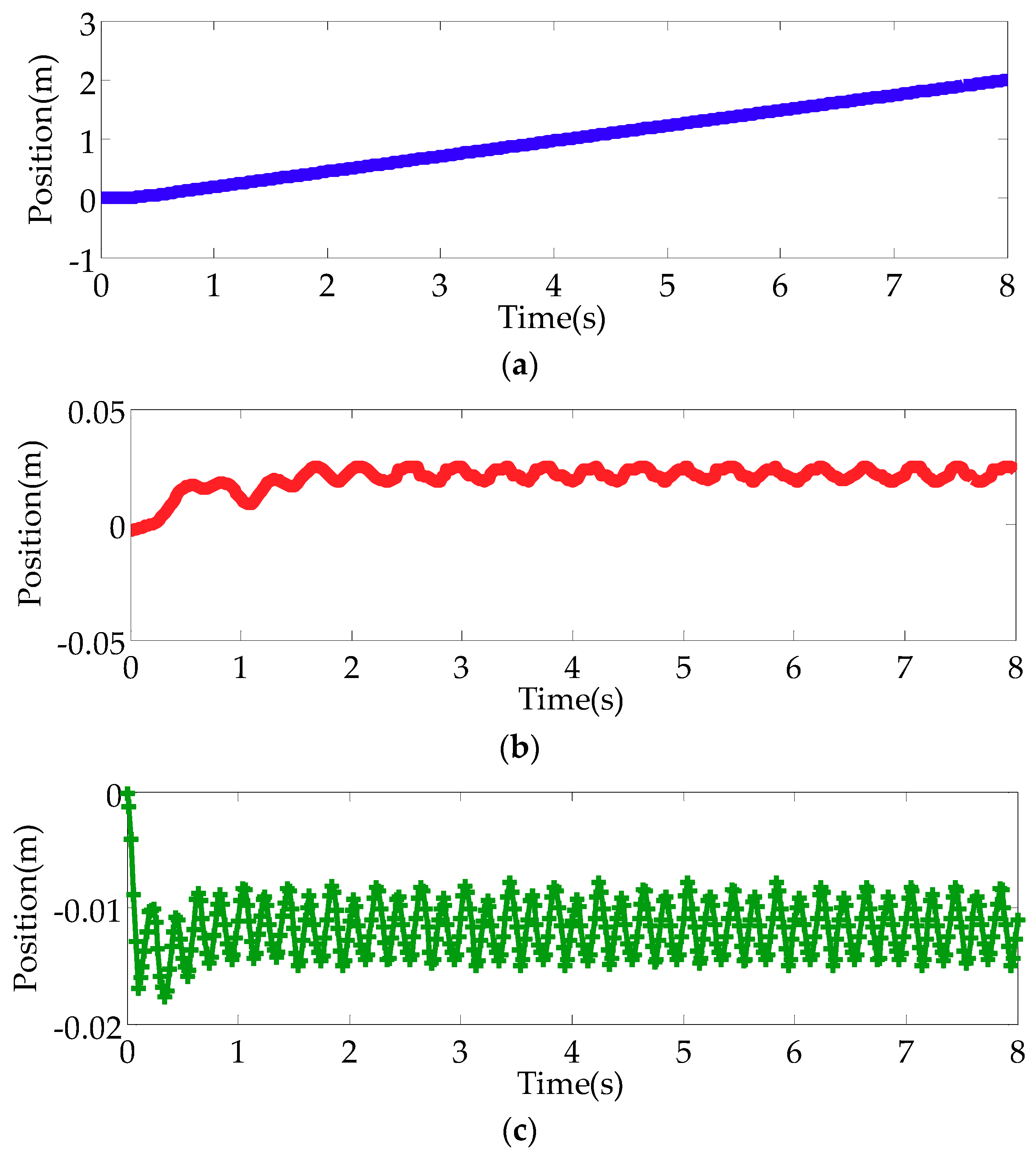
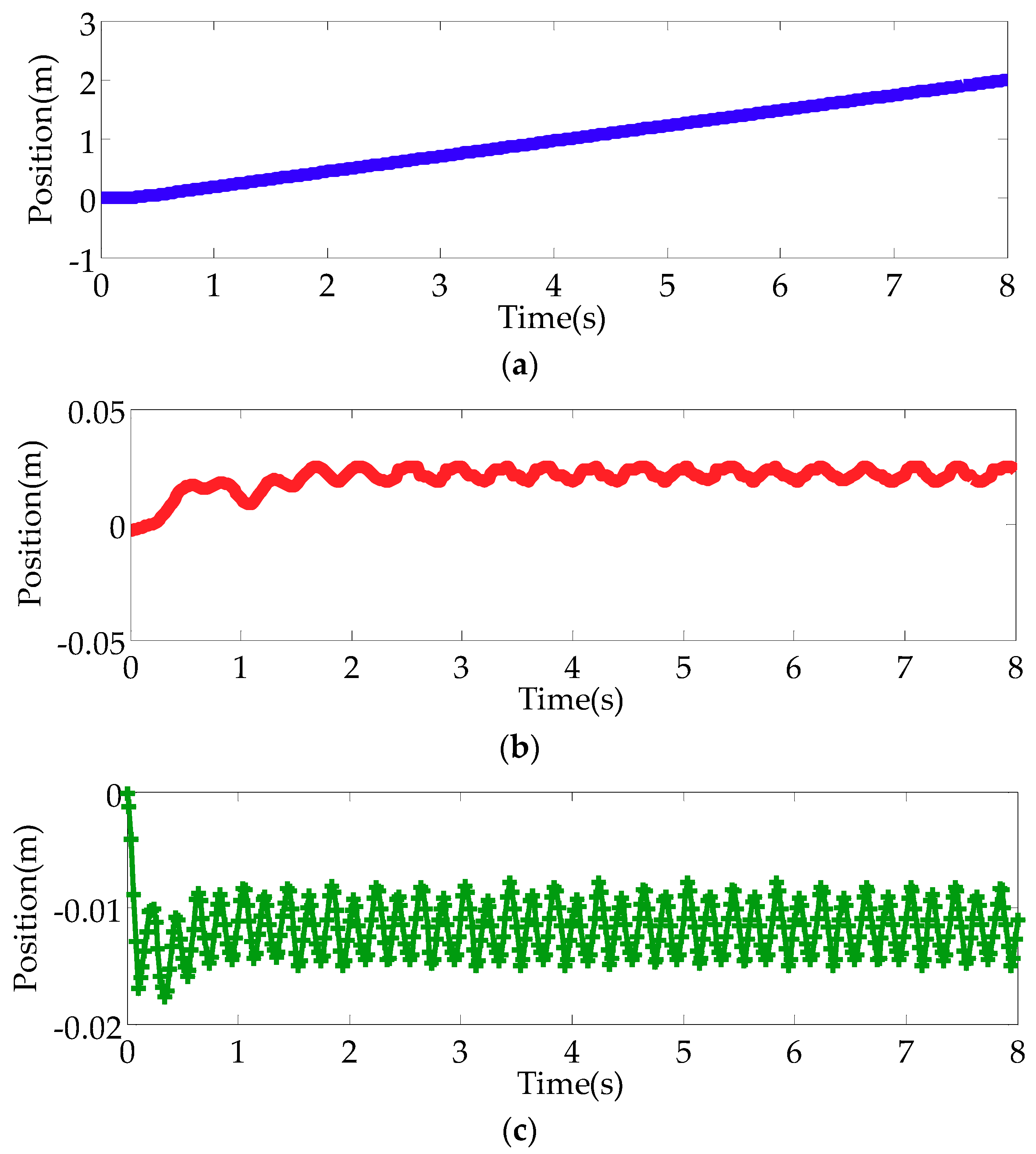
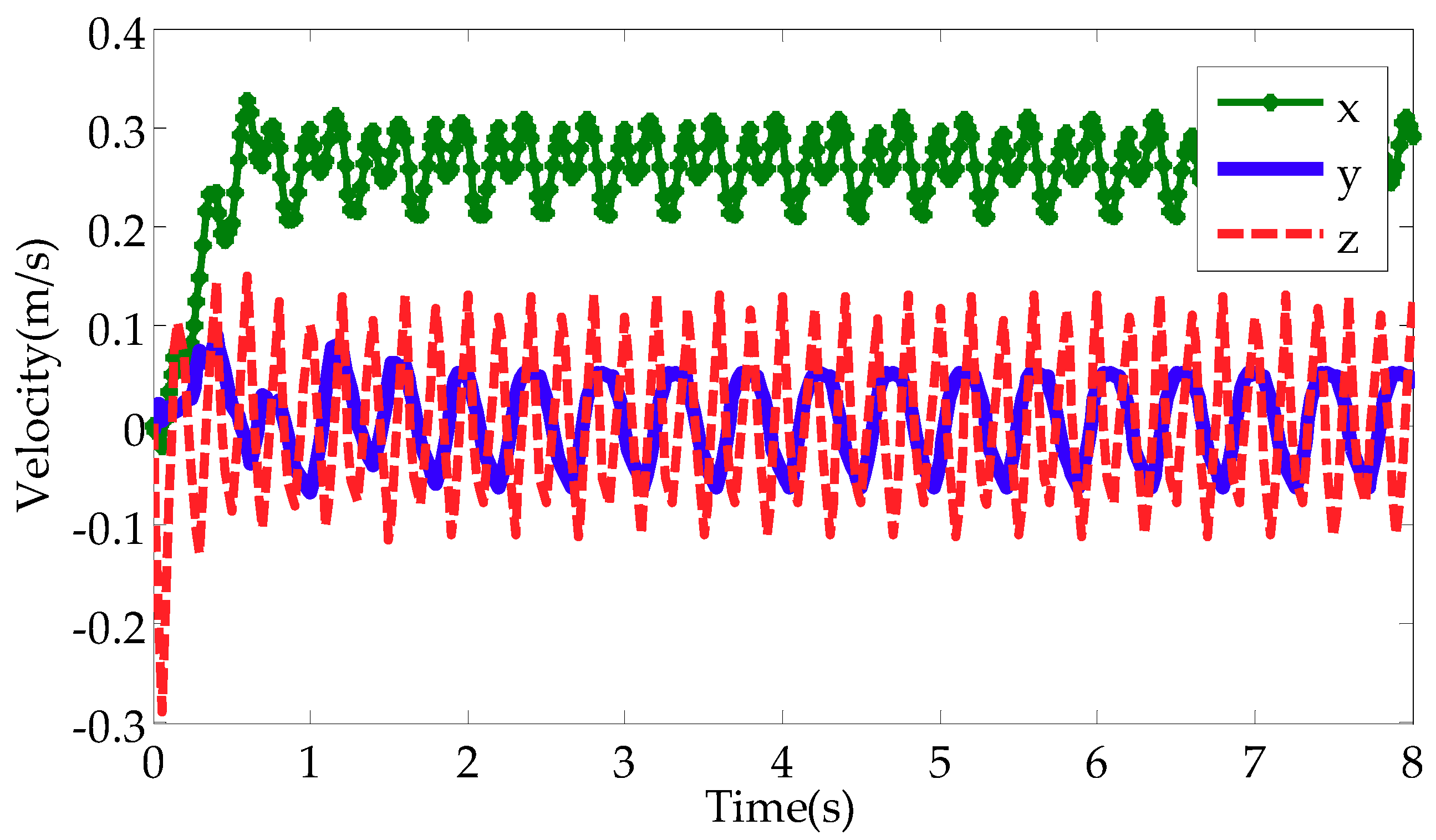
5.2. Simulation Results and Analysis
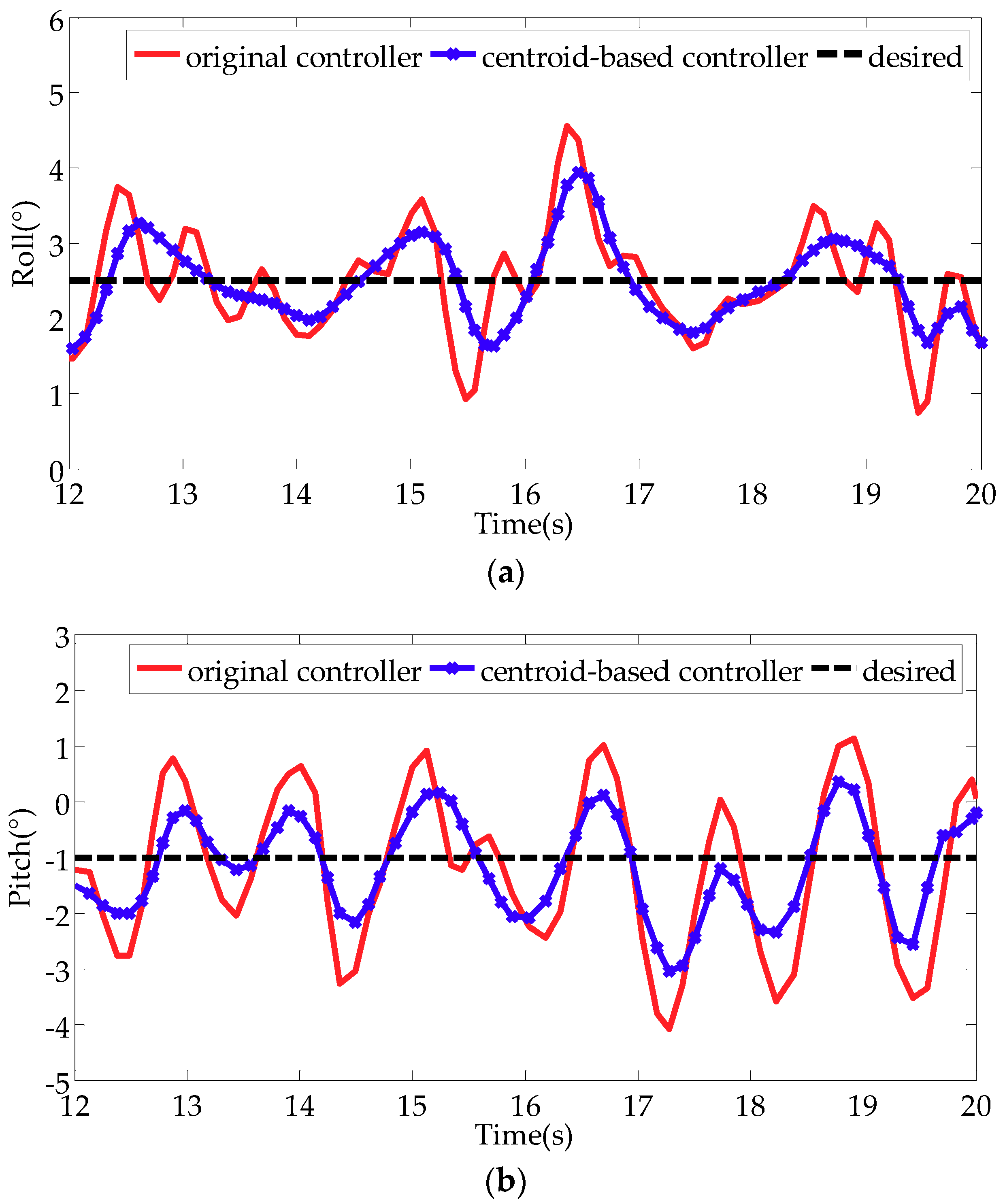
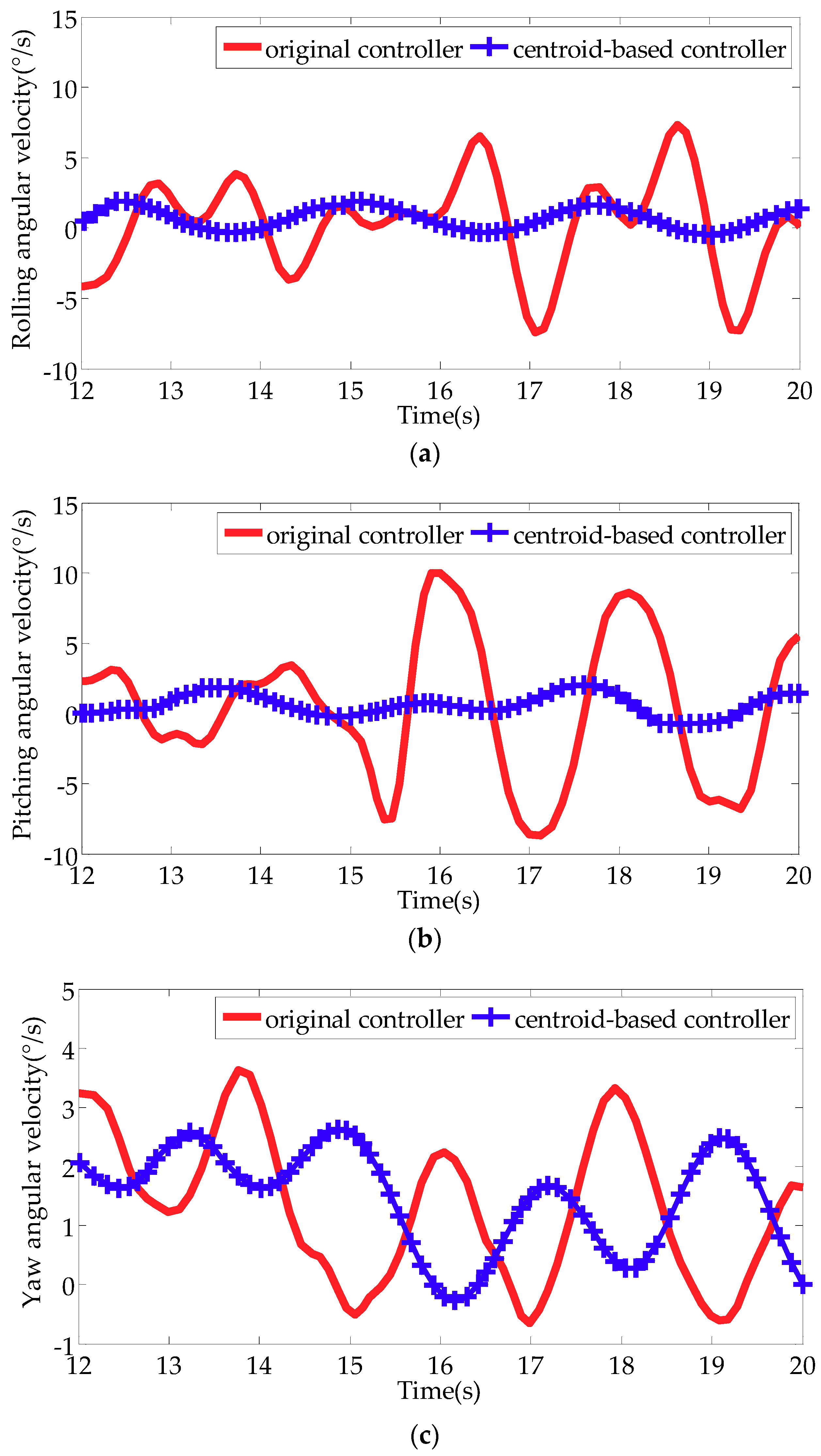
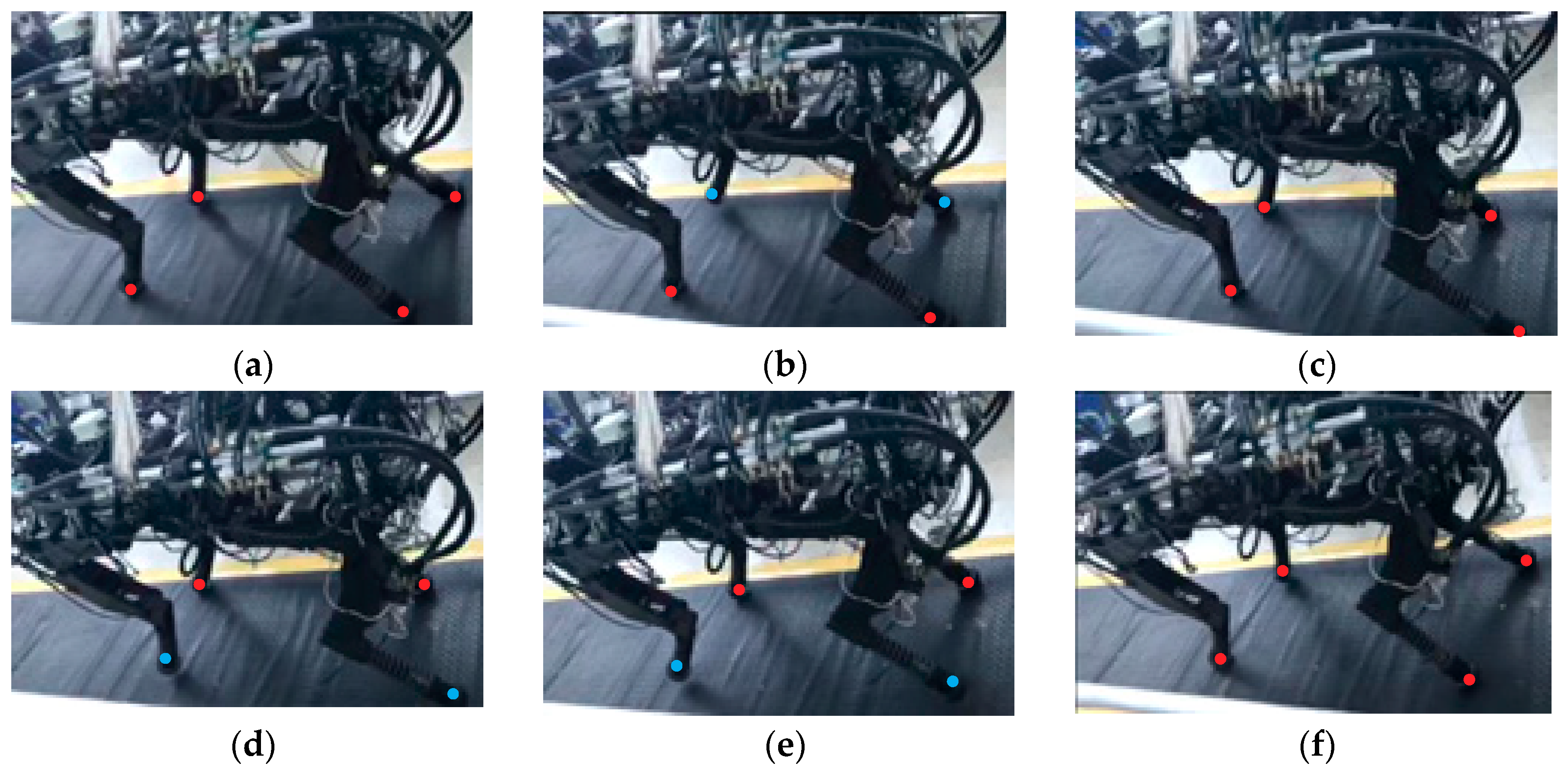
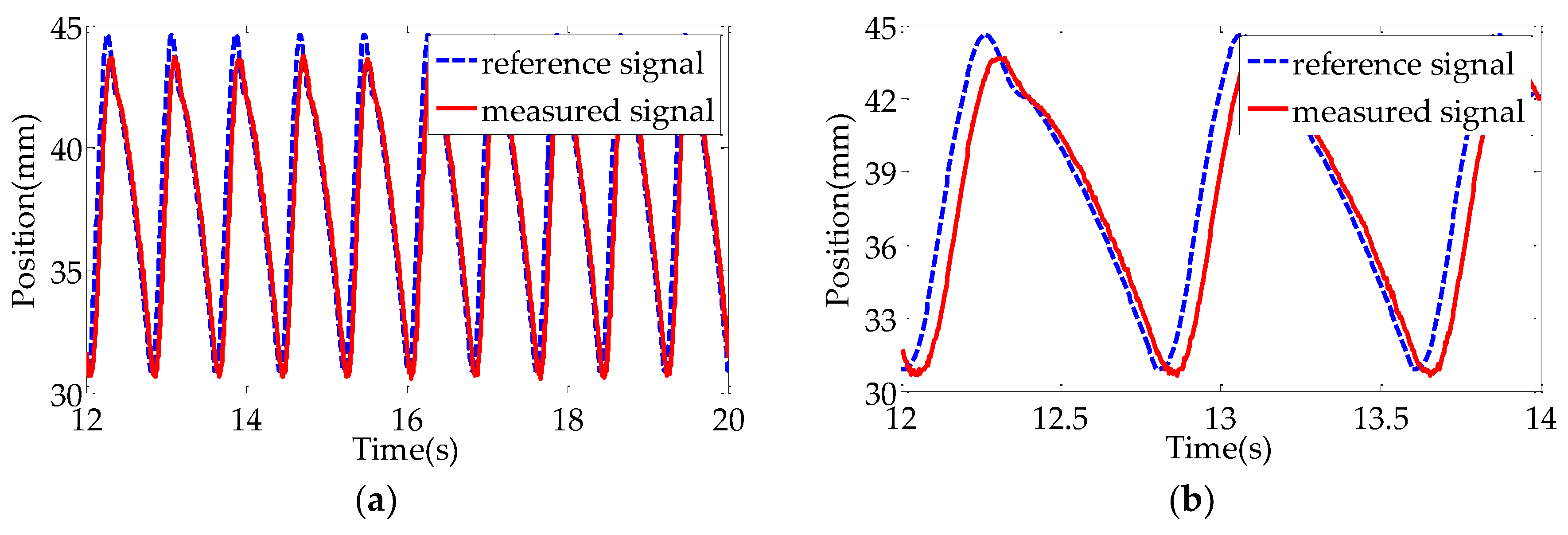
6. Experimental Analysis
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, X.; Gao, H.; Zha, F.; Li, J.; Wang, Y.; Guo, Y.; Wang, X. Learning the cost function for foothold selection in a quadruped robot. Sensors 2019, 19, 1292. [Google Scholar] [CrossRef] [PubMed]
- Yang, K.; Li, Y.; Zhou, L.; Rong, X. Energy efficient foot trajectory of trot motion for hydraulic quadruped robot. Energies. 2019, 12, 2514. [Google Scholar] [CrossRef]
- Mattila, J.; Koivumaki, J.; Caldwell, D.-G.; Semini, C. A survey on control of hydraulic robotic manipulators with projection to future trends. IEEE-ASME Trans. Mechatron. 2017, 22, 669–680. [Google Scholar] [CrossRef]
- Ba, K.; Yu, B.; Gao, Z.; Li, W.; Ma, G.; Kong, X. Parameters sensitivity analysis of position-based impedance control for bionic legged robots’ HDU. Appl. Sci. 2017, 7, 1035. [Google Scholar] [CrossRef]
- Raibert, M.; Blankespoor, K.; Nelson, G.; Playter, R. BigDog, the rough-terrain quadruped robot. IFAC Proc. Vol. 2008, 41, 10822–10825. [Google Scholar] [CrossRef]
- Yang, K.; Rong, X.; Zhou, L.; Li, Y. Modeling and analysis on energy consumption of hydraulic quadruped robot for optimal trot motion control. Appl. Sci. 2019, 9, 1771. [Google Scholar] [CrossRef]
- Focchi, M.; Del Prete, A.; Havoutis, I.; Featherstone, R.; Caldwell, D.-G.; Semini, C. High-slope terrain locomotion for torque-controlled quadruped robots. Auton. Robot. 2017, 41, 259–272. [Google Scholar] [CrossRef]
- Park, H.-W.; Kim, S. Quadrupedal galloping control for a wide range of speed via vertical impulse scaling. Bioinspir. Biomim. 2015, 10, 025003. [Google Scholar] [CrossRef] [PubMed]
- Wayne, P. Alpha dogs: how political spin became a global business. Int. Aff. 2009, 85, 168–169. [Google Scholar]
- Wensing, P.-M.; Wang, A.; Seok, S.; Otten, D.-M.; Lang, J.-H.; Kin, S. Proprioceptive actuator design in the MIT Cheetah: impact mitigation and high-bandwidth physical interaction for dynamic legged robots. IEEE Trans. Robot. 2017, 99, 1–14. [Google Scholar] [CrossRef]
- Dynamics, B. Spot Classic: Takes a Kicking and Keeps on Ticking. Available online: https://www.bostondynamics.com/spot-classic (accessed on 11 July 2019).
- Dynamics, B. Spot: Good Things Come in Small Packages. Available online: https://www.bostondynamics.com/spot (accessed on 11 July 2019).
- Hutter, M.; Gehring, C.; Lauber, A.; Gunther, F.; Bellicoso, C.-D.; Tsounis, V.; Fankhauser, P.; Diethelm, R.; Bachmann, S.; Bloesch, M.; et al. ANYmal - toward legged robots for harsh environments. Adv. Robot. 2017, 31, 1–14. [Google Scholar] [CrossRef]
- Semini, C.; Tsagarakis, N.-G.; Guglielmino, E.; Focchi, M.; Cannella, F.; Caldwell, D.-G. Design of HyQ—A hydraulically and electrically actuated quadruped robot. Proc. Inst. Mech. Eng. Part I-J. Syst. Control Eng. 2011, 225, 831–849. [Google Scholar] [CrossRef]
- Khan, H.; Kitano, S.; Frigerio, M.; Camurri, M.; Barasuol, V.; Featherstone, R.; Caldwell, D.-G.; Semini, C. Development of the lightweight hydraulic quadruped robot –MiniHyQ. In Proceedings of the 2015 IEEE International Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 11–12 May 2013. [Google Scholar]
- Semini, C.; Barasuol, V.; Goldsmith, J.; Frigerio, M.; Focchi, M.; Gao, Y.; Caldwell, D.-G. Design of the hydraulically-actuated, torque-controlled quadruped robot HyQ2Max. IEEE-ASME Trans. Mechatron. 2016, 99, 1–12. [Google Scholar] [CrossRef]
- Rong, X.; Li, Y.; Ruan, J.; Li, B. Design and simulation for a hydraulic actuated quadruped robot. J. Mech. Sci. Technol. 2012, 26, 1171–1177. [Google Scholar] [CrossRef]
- Chen, T.; Rong, X.; Li, Y.; Ding, C.; Chai, H.; Zhou, L. A compliant control method for robust trot motion of hydraulic actuated quadruped robot. Int. J. Adv. Robot. Syst. 2018, 15, 1–16. [Google Scholar] [CrossRef]
- Hudson, P.-E.; Corr, S.-A.; Wilson, A.-M. High speed galloping in the cheetah (Acinonyx jubatus) and the racing greyhound (Canis familiaris): spatio-temporal and kinetic characteristics. J. Exp. Biol. 2012, 215, 2425–2434. [Google Scholar] [CrossRef] [PubMed]
- Moro, F.-L.; Sprowitz, A.; Tuleu, A.; Vespignani, M.; Tsagarakis, N.-G.; Ijspeert, A.-J.; Caldwell, D.-G. Horse-like walking, trotting, and galloping derived from kinematic motion primitives (kMPs) and their application to walk/trot transitions in a compliant quadruped robot. Biol. Cybern. 2013, 107, 309–320. [Google Scholar] [CrossRef] [PubMed]
- Chung, J.-W.; Lee, I.-H.; Cho, B.-K.; Oh, J.-H. Posture stabilization strategy for a trotting point-foot quadruped robot. J. Intell. Robot. Syst. 2013, 72, 325–341. [Google Scholar] [CrossRef]
- Havoutis, I.; Semini, C.; Buchli, J.; Caldwell, D.-G. Quadrupedal trotting with active compliance. In Proceedings of the 2013 IEEE International Conference on Mechatronics, Vicenza, Italy, 27 February–1 March 2013; pp. 604–609. [Google Scholar]
- Cai, R.; Chen, Y.; Hou, W.; Wang, J.; Ma, H. Trotting gait of a quadruped robot based on the time-pose control method. Int. J. Adv. Robot. Syst. 2013, 10, 108. [Google Scholar]
- Gehring, C.; Coros, S.; Hutter, M.; Bloesch, M.; Hoepflinger, M.-A.; Siegwart, R. Control of dynamic gaits for a quadrupedal robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3287–3292. [Google Scholar]
- He, D.; Ma, P.; Cao, X.; Cao, C.; Yu, H. Impact of initial stance of quadruped trotting on walking stability. Robot 2004, 26, 529–532+537. [Google Scholar]
- Xie, H.; Shang, J.; Luo, Z.; Xue, Y. Body rolling analysis and attitude control of a quadruped robot during trotting. Robot 2014, 36, 676–682. [Google Scholar]
- Hayat, A.-A.; Elangovan, K.; Elara, M.-R.; Teja, M.-S. Tarantula: Design, Modeling, and Kinematic Identification of a Quadruped Wheeled Robot. Appl. Sci. 2019, 9, 94. [Google Scholar] [CrossRef]
- Boussema, C.; Powell, M.-J.; Bledt, G.; Ijspeert, A.-J.; Wensing, P.-M.; Kim, S. Online gait transitions and disturbance recovery for legged robots via the feasible impulse set. IEEE Robot. Auto. Letters 2019, 4, 1611–1618. [Google Scholar] [CrossRef]
- Tran, D.-T.; Koo, I.-M.; Lee, Y.-H.; Moon, H.; Koo, J.; Park, S.; Choi, H.-R. Motion control of a quadruped robot in unknown rough terrain using 3D spring damper leg model. Int. J. Control Autom. Syst. 2014, 12, 372–382. [Google Scholar] [CrossRef]
- Fukui, T.; Fujisawa, H.; Otaka, K.; Fukuoka, Y. Autonomous gait transition and galloping over unperceived obstacles of a quadruped robot with CPG modulated by vestibular feedback. Robot. Auton. Syst. 2018. [Google Scholar] [CrossRef]
- Park, H.-W.; Ramezani, A.; Grizzle, J.-W. A finite-state machine for accommodating unexpected large ground-height variations in bipedal robot walking. IEEE Trans. Robot. 2013, 29, 331–345. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Bijan, S.; Mukherjee, S.-K. Integrating AHP with QFD for robot selection under requirement perspective. Int. J. Prod. Res. 2005, 43, 3671–3685. [Google Scholar] [CrossRef]
- Chai, H.; Meng, J.; Rong, X.; Li, Y. Design and implementation of SCalf, an advanced hydraulic quadruped robot. Robot 2014, 36, 385–391. [Google Scholar]
- Sakakibara, Y.; Kan, K.; Hosoda, Y.; Hattori, M.; Fujie, M. Foot trajectory for a quadruped walking machine. Proceedings of IEEE International Workshop on Intelligent Robots and Systems, Ibaraki, Japan, 3–6 July 1990; pp. 315–322. [Google Scholar]
- Li, B.; Li, Y.; Rong, X.; Meng, J. Trotting gait planning and implementation for a little quadruped robot. In Proceedings of the 2011 International Conference on Electric and Electronics, Nanchang, China, 20–22 June 2011; pp. 195–202. [Google Scholar]
- Li, Y.; Li, B.; Rong, X.; Meng, J. Mechanical design and gait planning of a hydraulically actuated quadruped bionic robot. J. Shandong Univ. Eng. Sci. 2011, 41, 32–36. [Google Scholar]
- Zhang, S.; Rong, X.; Li, Y.; Li, B. Static gait planning method for quadruped robots on rough terrains. J. Jilin Univ. (Eng. Technol. Ed.) 2016, 46, 1287–1296. [Google Scholar]
- Lei, J.; Jia, G. Control of quadruped robot with trot gait. J. Shanghai Univ. (Nat. Sci.) 2017, 23, 882–892. [Google Scholar]
- Kim, K.-Y.; Park, J.-H. Ellipse-based leg-trajectory generation for galloping quadruped robots. J. Mech. Sci. Technol. 2008, 22, 2099–2106. [Google Scholar] [CrossRef]
- Wang, L.; Wang, J.; Wang, S.; He, Y. Strategy of foot trajectory generation for hydraulic quadruped robots gait planning. Chin. J. Mech. Eng. 2013, 49, 39–44. [Google Scholar] [CrossRef]
- Pratt, J.; Torres, A.; Dilworth, P.; Pratt, G. Virtual actuator control. In Proceedings of the 1996 IEEE/RSJ International Conference on Intelligent Robots and Systems, Osaka, Japan, 4–8 November 1996; pp. 1219–1226. [Google Scholar]
- Pratt, J.; Chew, C.-M.; Torres, A.; Dilworth, P.; Pratt, G. Virtual model control: An intuitive approach for bipedal locomotion. Int. J. Robot. Res. 2001, 20, 129–143. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| cycle time | 0.8 s |
| stride length | 200 mm |
| max foot height | 50 mm |
| simulation time | 8 s |
| gravity acceleration | 9.8 m/s2 |
| static friction coefficient | 0.6 |
| dynamic friction coefficient | 0.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, D.; Shao, J.; Sun, G.; Shao, X. The Complex Dynamic Locomotive Control and Experimental Research of a Quadruped-Robot Based on the Robot Trunk. Appl. Sci. 2019, 9, 3911. https://doi.org/10.3390/app9183911
Ren D, Shao J, Sun G, Shao X. The Complex Dynamic Locomotive Control and Experimental Research of a Quadruped-Robot Based on the Robot Trunk. Applied Sciences. 2019; 9(18):3911. https://doi.org/10.3390/app9183911
Chicago/Turabian StyleRen, Dongyi, Junpeng Shao, Guitao Sun, and Xuan Shao. 2019. "The Complex Dynamic Locomotive Control and Experimental Research of a Quadruped-Robot Based on the Robot Trunk" Applied Sciences 9, no. 18: 3911. https://doi.org/10.3390/app9183911
APA StyleRen, D., Shao, J., Sun, G., & Shao, X. (2019). The Complex Dynamic Locomotive Control and Experimental Research of a Quadruped-Robot Based on the Robot Trunk. Applied Sciences, 9(18), 3911. https://doi.org/10.3390/app9183911