Pressure Observer Based Adaptive Dynamic Surface Control of Pneumatic Actuator with Long Transmission Lines


Abstract
Featured Application
Abstract
1. Introduction
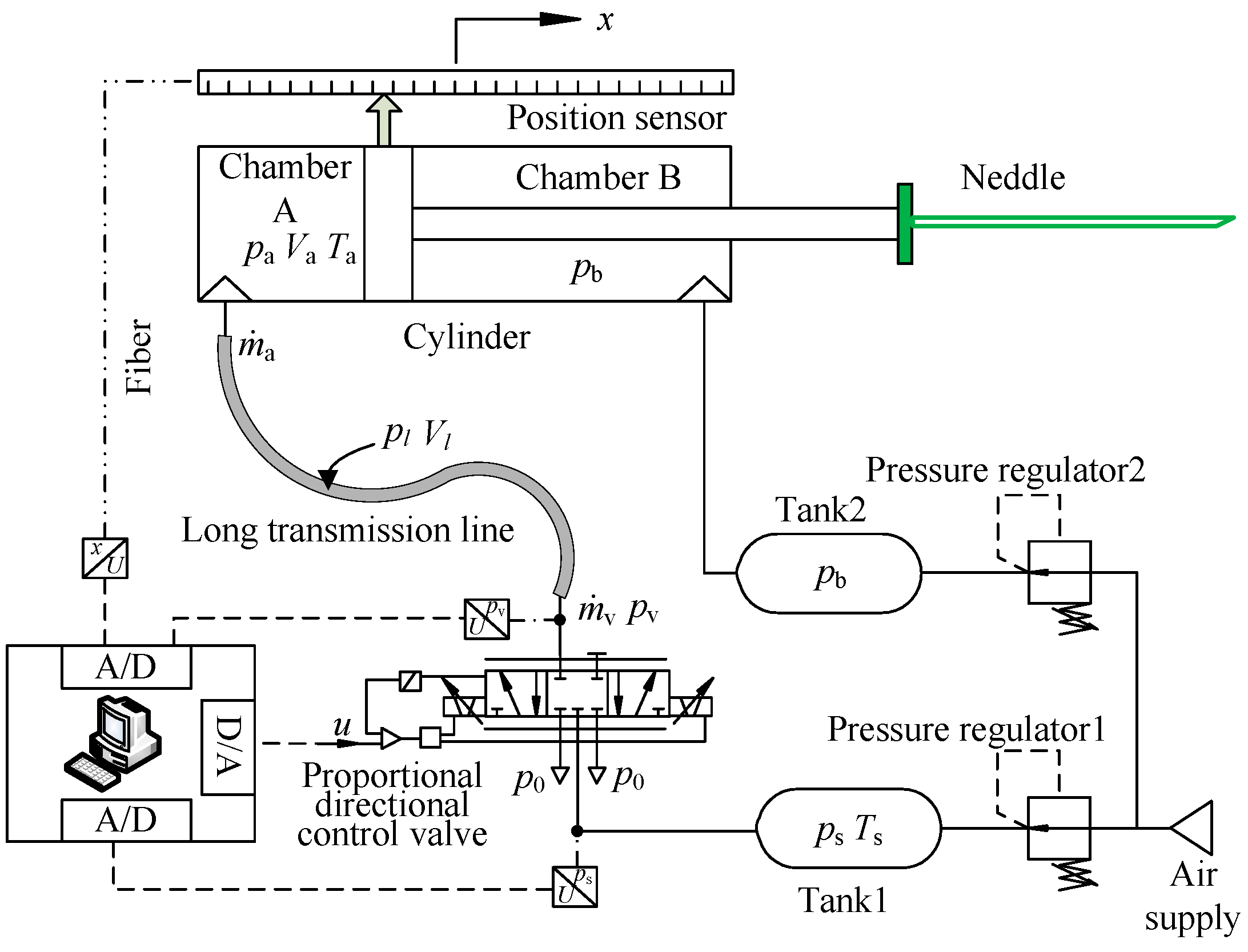
2. Dynamic Models and Problem Formulation
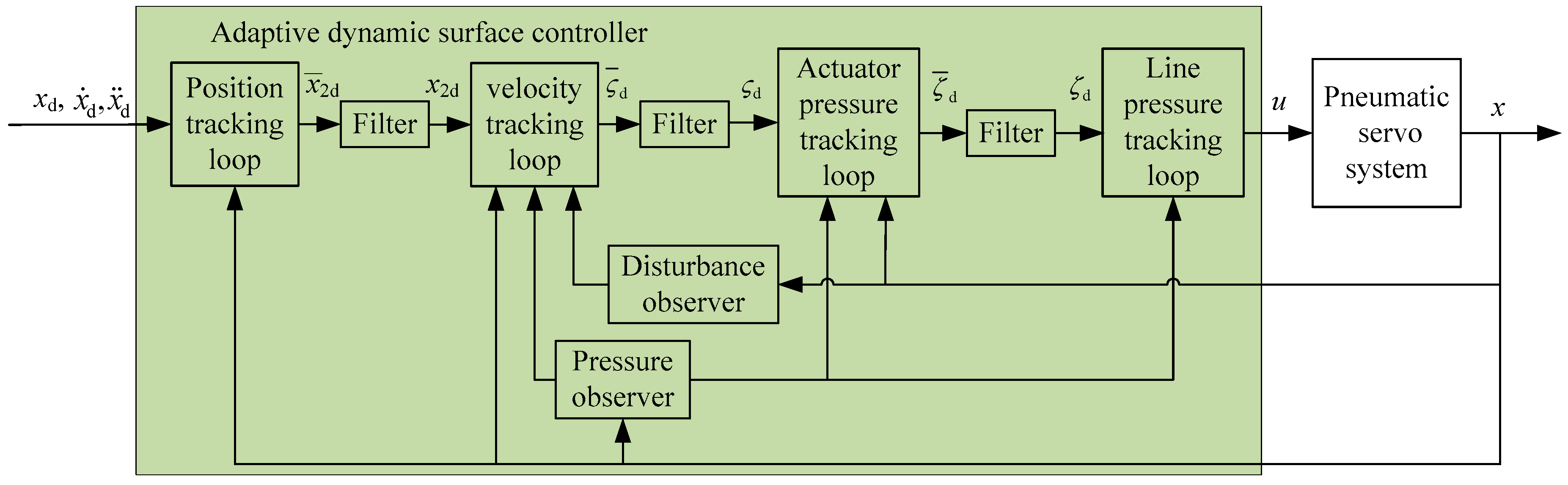
3. Controller Design
3.1. Pressure Observer
- implies that , yielding .
- implies that , yielding .
- implies that , yielding .
- implies that , yielding .
- implies that , yielding .
- implies that , yielding .
3.2. Adaptive Dynamic Surface Controller
3.3. Proof of Stability
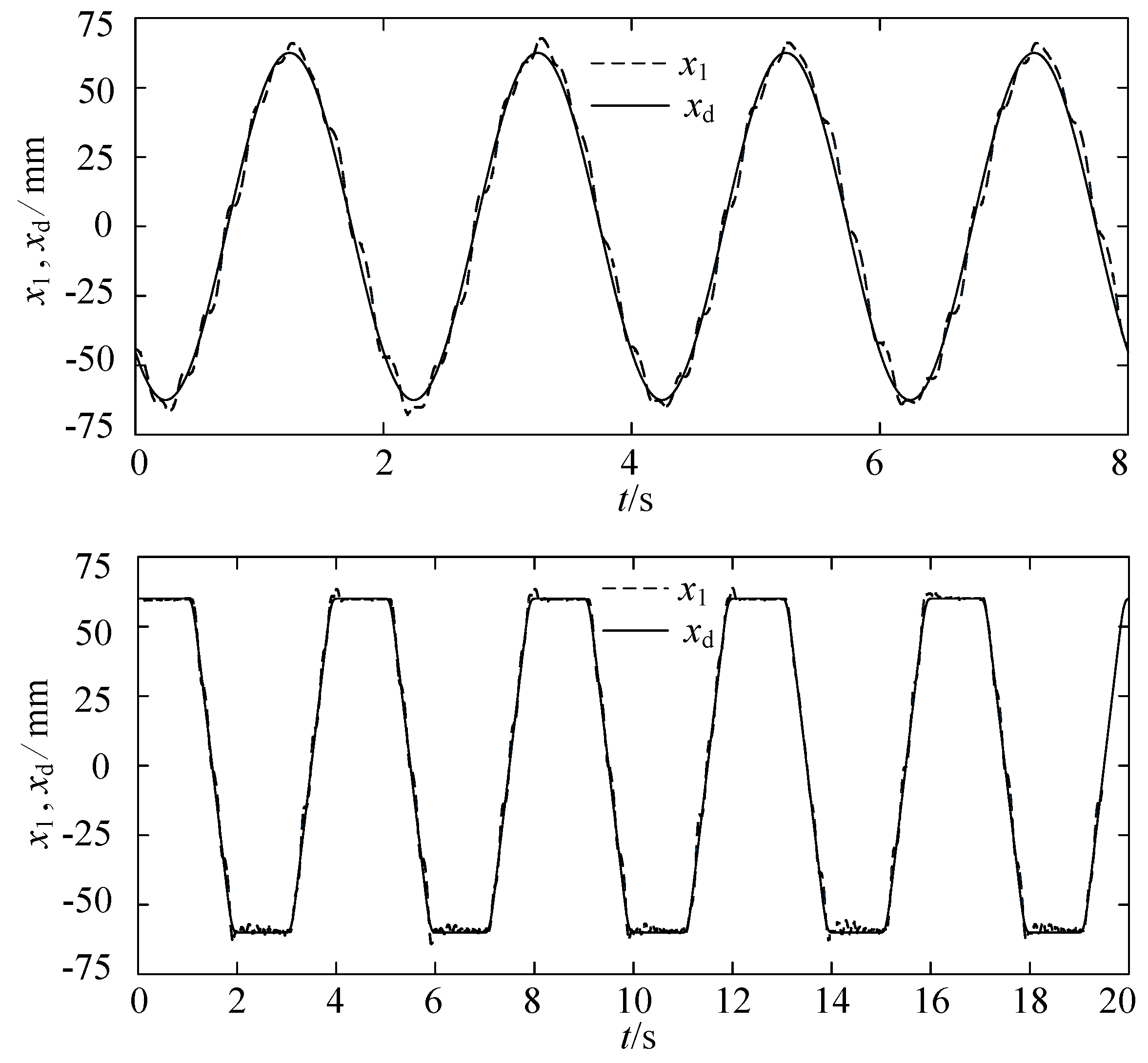
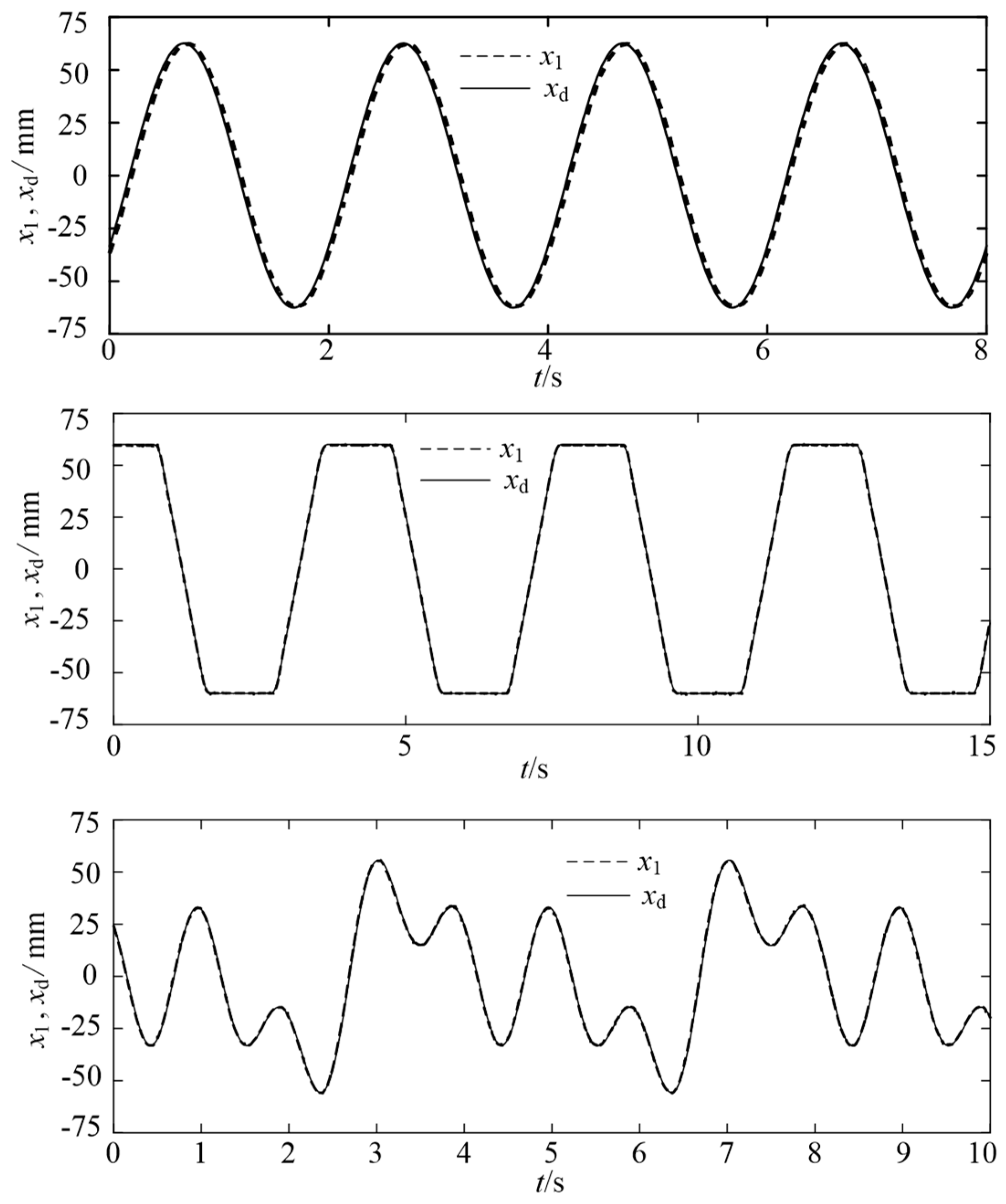
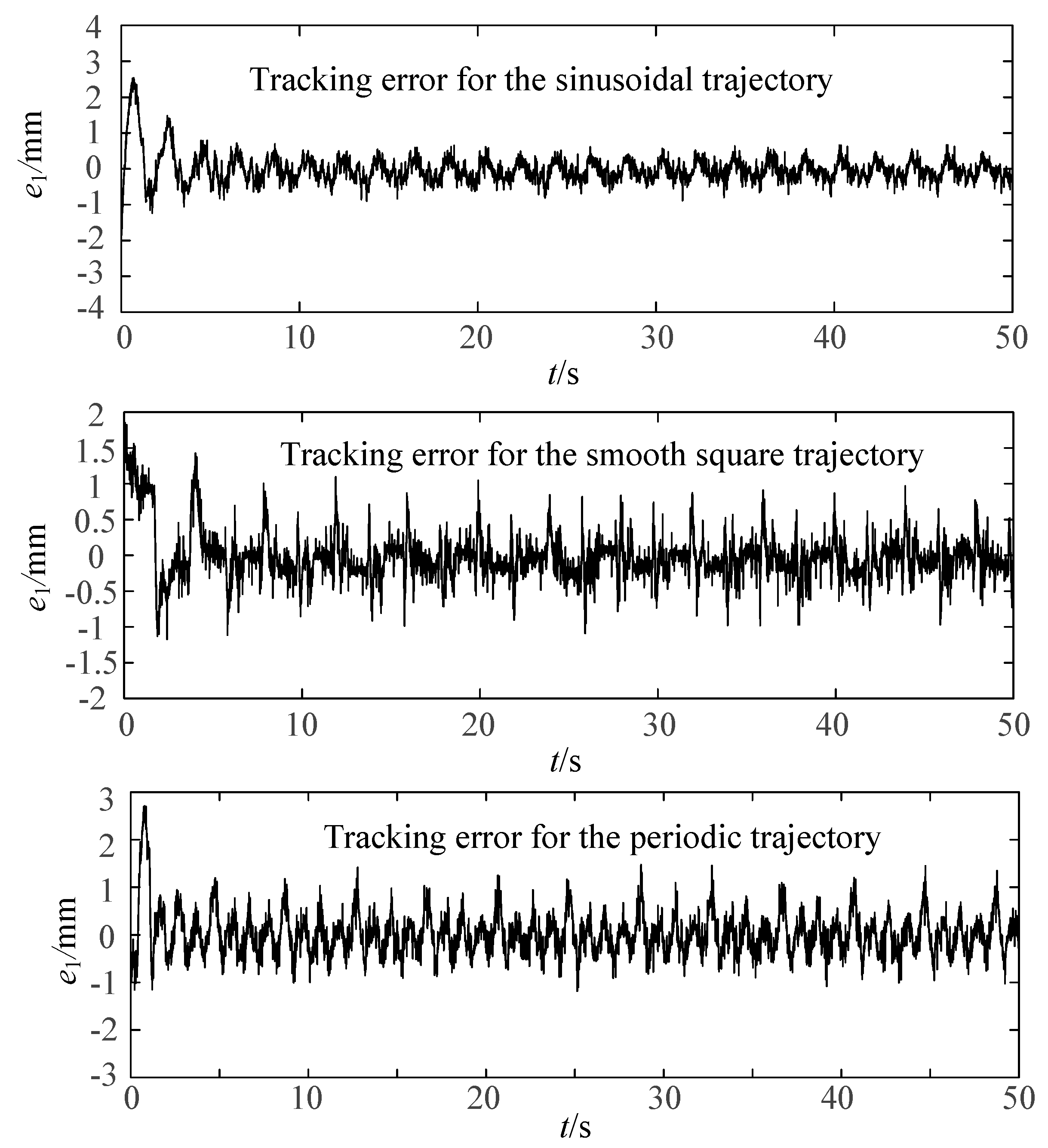
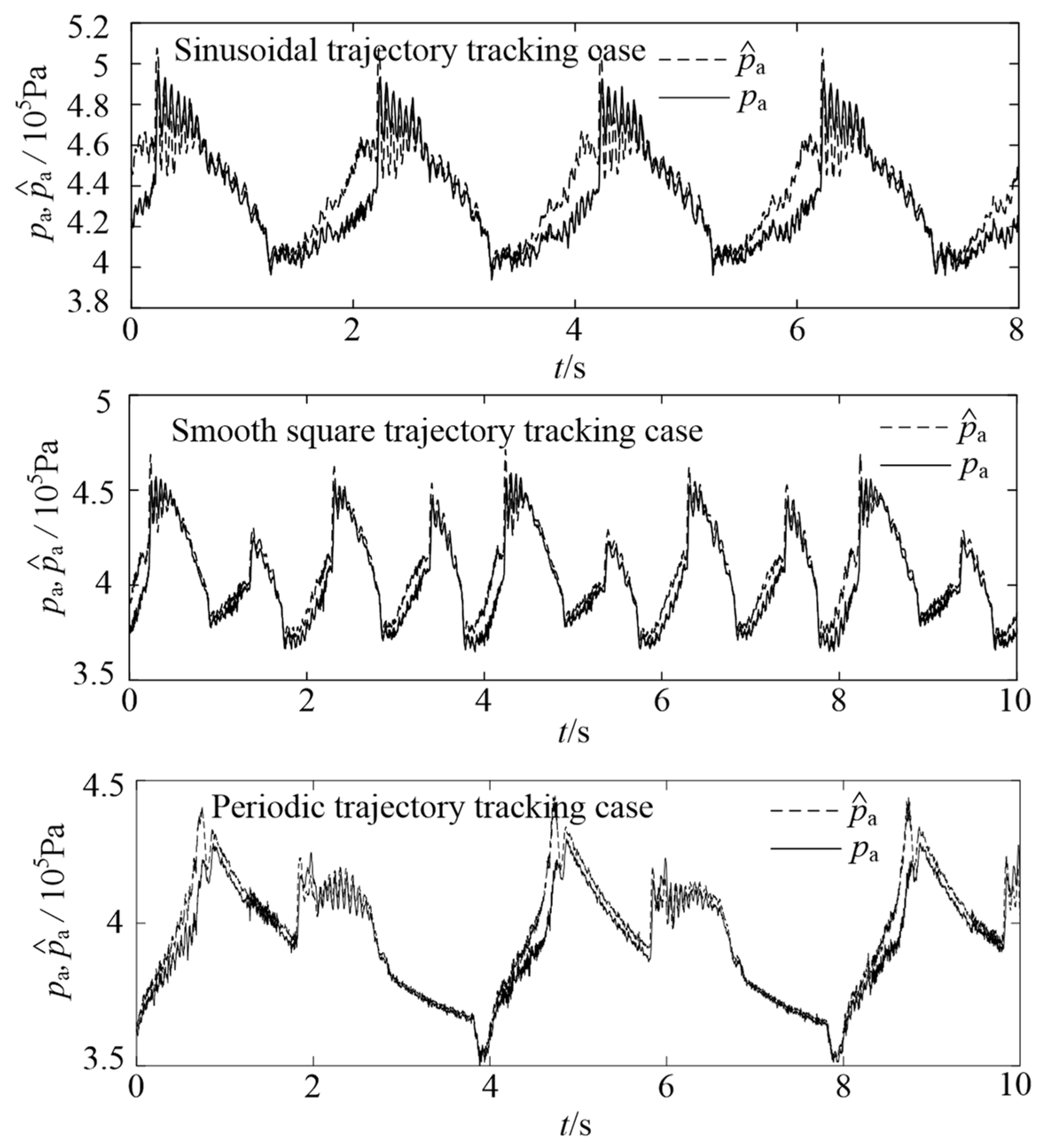
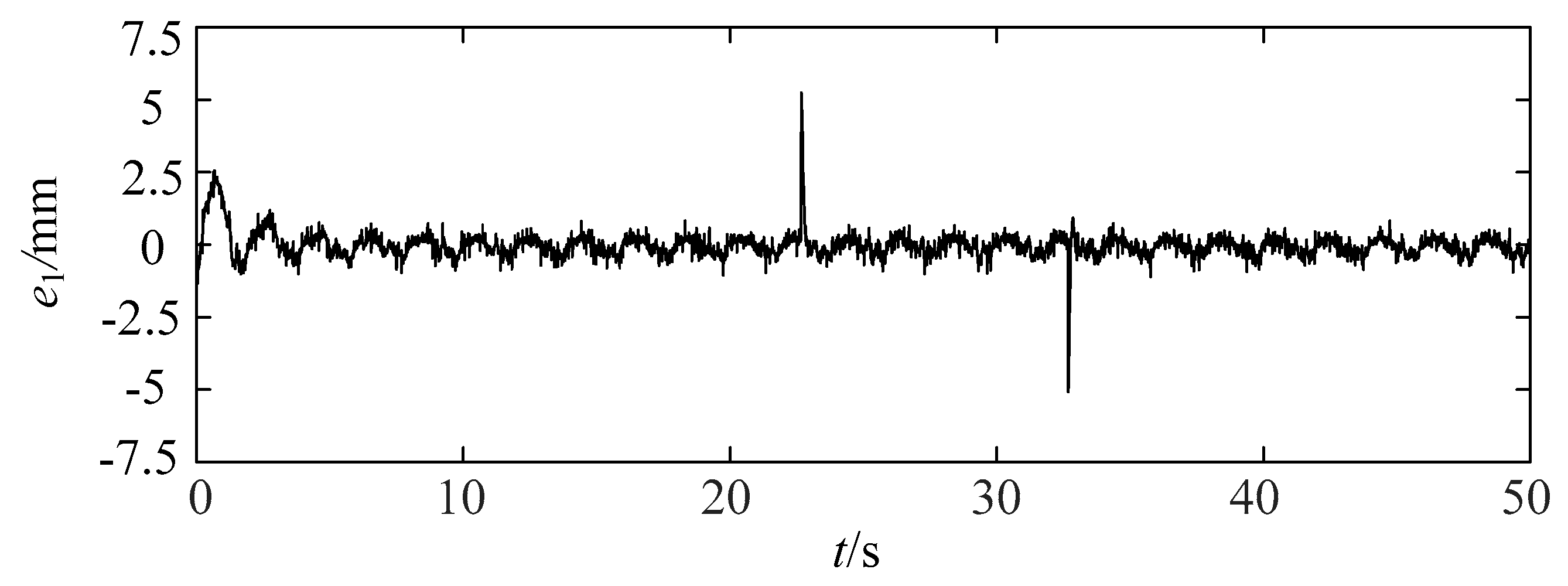
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fischer, G.; Iordachita, I.; Csoma, C.; Tokuda, J.; DiMaio, S.; Tempany, C.; Hata, N.; Fichtinger, G. MRI-compatible pneumatic robot for transperineal prostate needle placement. IEEE/ASME Trans. Mechatron. 2008, 13, 295–305. [Google Scholar] [CrossRef] [PubMed]
- Stoianovici, D.; Jun, C.; Lim, S.; Li, P.; Petrisor, D.; Fricke, S.; Sharma, K.; Cleary, K. Multi-image compatible, MR safe, remote center of motion needle-guide robot. IEEE Trans. Biomed. Eng. 2018, 65, 165–177. [Google Scholar] [CrossRef] [PubMed]
- Stoianovici, D.; Kim, C.; Srimathveeravalli, G.; Sebrecht, P.; Petrisor, D.; Coleman, J.; Solomon, S.; Hricak, H. MRI-Safe Robot for Endorectal Prostate Biopsy. Trans. Mechatron. 2014, 19, 1289–1299. [Google Scholar] [CrossRef]
- Stoianovici, D.; Patriciu, A.; Petrisor, D.; Mazilu, D.; Kavoussi, L. A new type of motor: Pneumatic step motor. IEEE/ASME Trans. Mechatron. 2007, 12, 98–106. [Google Scholar] [CrossRef] [PubMed]
- Zemiti, N.; Bricault, I.; Fouard, C.; Sanchez, B.; Cinquin, P. LPR: A CT and MR-compatible puncture robot to enhance accuracy and safety of image-guided interventions. IEEE/ASME Trans. Mechatron. 2008, 13, 306–315. [Google Scholar] [CrossRef]
- Schouten, M.; Bomers, J.; Yakar, D.; Huisman, H.; Rothgang, E.; Bosboom, D.; Scheenen, T.; Misra, S.; Futterer, J. Evaluation of a robotic technique for transrectal MRI-guided prostate biopsies. Eur. Radiol. 2012, 22, 476–483. [Google Scholar] [CrossRef] [PubMed]
- Franco, E.; Brujic, D.; Rea, M.; Gedroyc, W.; Ristic, M. Needle-guiding robot for laser ablation of liver tumors under MRI guidance. IEEE/ASME Trans. Mechatron. 2016, 21, 931–944. [Google Scholar] [CrossRef]
- Yang, B.; Tan, U.; McMillan, A.; Gullapalli, R.; Desai, J. Design and control of a 1-DOF MRI-compatible pneumatically actuated robot with long transmission lines. IEEE/ASME Trans. Mechatron. 2011, 16, 1040–1048. [Google Scholar] [CrossRef] [PubMed]
- Yang, B.; Roys, S.; Tan, U.; Philip, M.; Richard, H.; Gullapalli, R.; Desai, J. Design, development, and evaluation of a master–slave surgical system for breast biopsy under continuous MRI. Int. J. Robot. Res. 2014, 33, 616–630. [Google Scholar] [CrossRef]
- Van den Bosch, M.; Moman, M.; van Vulpen, M.; Battermann, J.; Duiveman, E.; van Schelven, L.; de Leeuw, H.; Lagendijk, J.; Moerland, M. MRI-guided robotic system for transperineal prostate interventions: Proof of principle. Phys. Med. Biol. 2010, 55, 133–140. [Google Scholar] [CrossRef]
- Chen, Y.; Squires, A.; Seifabadi, R.; Xu, S.; Agarwal, H.; Bernardo, M.; Pinto, P.; Choyke, P.; Wood, B.; Tse, Z. Robotic system for MRI-guided focal laser ablation in the prostate. IEEE/ASME Trans. Mechatron. 2017, 22, 107–114. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Xu, S.; Squires, A.; Seifabadi, R.; Turkbey, I.; Pinto, P.; Choyke, P.; Wood, B.; Tse, Z. MRI-guided robotically assisted focal laser ablation of the prostate using canine cadavers. IEEE/ASME Trans. Mechatron. 2018, 65, 1434–1442. [Google Scholar] [CrossRef] [PubMed]
- Melzer, A.; Gutmann, B.; Remmele, T.; Wolf, R.; Lukoscheck, A.; Bock, M.; Bardenheuer, H.; Fischer, H. INNOMOTION for percutaneous image-guided interventions. IEEE Eng. Med. Biol. Mag. 2008, 27, 66–73. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Feng, W.; Lou, J.; Yang, Z.; Liu, J.; Yang, J. Modeling and control of a five-degrees-of-freedom pneumatically actuated magnetic resonance-compatible robot. Int. J. Med. Robot. Comput. Assist. Surg. 2014, 10, 170–179. [Google Scholar] [CrossRef] [PubMed]
- Comber, D.; Barth, E.; Webster, R. Design and control of a magnetic resonance compatible precision pneumatic active cannula robot. J. Med. Dev. 2014, 8, 1011003-1–1011003-7. [Google Scholar] [CrossRef]
- Richer, E.; Hurmuzlu, Y. A high performance pneumatic force actuator system: Part 1—nonlinear mathematical model. J. Dyn. Syst. Meas. Control 2000, 122, 416–425. [Google Scholar] [CrossRef]
- Richer, E.; Hurmuzlu, Y. A high performance pneumatic force actuator system: Part II—nonlinear controller design. J. Dyn. Syst. Meas. Control 2000, 122, 426–434. [Google Scholar] [CrossRef]
- Turkseven, M.; Ueda, J. An asymptotically stable pressure observer based on load and displacement sensing for pneumatic actuators with long transmission lines. IEEE/ASME Trans. Mechatron. 2017, 22, 681–692. [Google Scholar] [CrossRef]
- Li, J.; Kawashima, K.; Fujita, T.; Kagawa, T. Control design of a pneumatic cylinder with distributed model of pipelines. Precis. Eng. 2013, 37, 880–887. [Google Scholar] [CrossRef]
- Krichel, S.; Sawodny, O. Non-linear friction modeling and simulation of long pneumatic transmission lines. Math. Comput. Model. Dyn. Syst. 2014, 20, 23–44. [Google Scholar] [CrossRef]
- Turkseven, M.; Ueda, J. Model-based force control of pneumatic actuators with long transmission lines. IEEE/ASME Trans. Mechatron. 2018, 23, 1292–1302. [Google Scholar] [CrossRef]
- Pandian, S.; Takemura, F.; Hayakawa, Y.; Kawamura, S. Pressure observer-controller design for pneumatic cylinder actuators. IEEE/ASME Trans. Mechatron. 2002, 7, 490–499. [Google Scholar] [CrossRef]
- Wu, J.; Goldfarb, M.; Barth, E. On the observability of pressure in a pneumatic servo actuator. J. Dyn. Syst. Meas. Control 2004, 126, 921–924. [Google Scholar] [CrossRef]
- Bigras, P. Sliding-mode observer as a time-variant estimator for control of pneumatic systems. J. Dyn. Syst. Meas. Control 2005, 127, 499–502. [Google Scholar] [CrossRef]
- Gulati, N.; Barth, E. A globally stable, load-independent pressure observer for the servo control of pneumatic actuators. IEEE/ASME Trans. Mechatron. 2009, 14, 295–306. [Google Scholar] [CrossRef]
- Langjord, H.; Kassa, G.; Johansen, T. Adaptive nonlinear observer for electropneumatic clutch actuator with position sensor. IEEE Trans. Control Syst. Technol. 2012, 20, 1033–1039. [Google Scholar] [CrossRef]
- Driver, T.; Shen, X. Pressure estimation-based robust force control of pneumatic actuators. Int. J. Fluid Power 2013, 14, 37–45. [Google Scholar] [CrossRef]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef]
- Kheowree, T.; Kuntanapreeda, S. Adaptive dynamic surface control of an electrohydraulic actuator with friction compensation. Asian J. Control 2015, 17, 855–867. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, D.; Chen, Z.; Hu, X.; Lan, W. Adaptive dynamic surface control for formations of autonomous surface vehicles with uncertain dynamics. IEEE Trans. Control Syst. Technol. 2013, 21, 513–520. [Google Scholar] [CrossRef]
- Huang, J.; Ri, S.; Liu, L.; Wang, Y.; Kim, Y.; Pak, G. Nonlinear disturbance observer-based dynamic surface control of mobile wheeled inverted pendulum. IEEE Trans. Control Syst. Technol. 2015, 23, 2400–2407. [Google Scholar] [CrossRef]
- Wu, J.; Huang, J.; Wang, Y.; Xing, K. Nonlinear disturbance observer-based dynamic surface control for trajectory tracking of pneumatic muscle system. IEEE Trans. Control Syst. Technol. 2014, 22, 440–455. [Google Scholar] [CrossRef]
- Wang, M.; Ren, X.; Chen, Q.; Wang, S.; Gao, X. Modified dynamic surface approach with bias torque for multi-motor servomechanism. Control Eng. Pract. 2016, 50, 57–68. [Google Scholar] [CrossRef]
- Li, A.; Meng, D.; Lu, B.; Li, Q. Nonlinear cascade control of single-rod pneumatic actuator based on an extended disturbance observer. J. Cent. South Univ. 2019, 26, 1637–1648. [Google Scholar] [CrossRef]
- Meng, D.; Tao, G.; Chen, J.; Ban, W. Modeling of a pneumatic system for high-accuracy position control. In Proceedings of the International Conference on Fluid Power and Mechatronics, Beijing, China, 17–20 August 2011; pp. 505–510. [Google Scholar]
- Goodwin, G.; Mayne, D. A parameter estimation perspective of continuous time model reference adaptive control. Automatica 1989, 23, 57–70. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Unit |
|---|---|---|
| m | 0.32 | kg |
| Aa | 7.854 × 10−5 | m2 |
| Ab | 6.597 × 10−4 | m2 |
| Ar | 1.257 × 10−5 | m2 |
| R | 287 | N m/(kg K) |
| Ts | 300 | K |
| ps | 6 × 105 | Pa |
| Va0 | 6 × 10−7 | m3 |
| Lc | 0.125 | m |
| Vl | 1.257 × 10−4 | m3 |
| Cd | 1.099 − 0.1075 × | |
| pr | 0.29 | |
| Al | 1.257 × 10−5 | m2 |
| Dl | 0.004 | m |
| Ll | 10 | m |
| 1.79 × 10−5 | N s/m2 | |
| p0 | 1 × 105 | Pa |
| 9, 0, 15 | N s/m | |
| 6, 0, 20 | N | |
| 0, −10, 10 | N | |
| k1, | 40, 0.5 | |
| k2, h1, , | 50, 40, 0.4, 0.75 | |
| k3, | 50, 1.2 | |
| k4 | 90 | |
| 100, 10, 10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, D.; Lu, B.; Li, A.; Yin, J.; Li, Q. Pressure Observer Based Adaptive Dynamic Surface Control of Pneumatic Actuator with Long Transmission Lines. Appl. Sci. 2019, 9, 3621. https://doi.org/10.3390/app9173621
Meng D, Lu B, Li A, Yin J, Li Q. Pressure Observer Based Adaptive Dynamic Surface Control of Pneumatic Actuator with Long Transmission Lines. Applied Sciences. 2019; 9(17):3621. https://doi.org/10.3390/app9173621
Chicago/Turabian StyleMeng, Deyuan, Bo Lu, Aimin Li, Jiang Yin, and Qingyang Li. 2019. "Pressure Observer Based Adaptive Dynamic Surface Control of Pneumatic Actuator with Long Transmission Lines" Applied Sciences 9, no. 17: 3621. https://doi.org/10.3390/app9173621
APA StyleMeng, D., Lu, B., Li, A., Yin, J., & Li, Q. (2019). Pressure Observer Based Adaptive Dynamic Surface Control of Pneumatic Actuator with Long Transmission Lines. Applied Sciences, 9(17), 3621. https://doi.org/10.3390/app9173621