1. Introduction
The phenomenon of saturation affects all real-world systems due to the inherent physical limitations of actuation devices. Designing a control system without taking into account the presence of saturation may lead to severe deterioration of the performance and even to instability of the closed-loop system. For this reason, this issue has been investigated by several control theorists, with recent results such as those reported in References [
1,
2,
3,
4,
5,
6,
7]. Existing solutions may be divided into two categories—anti-windup compensation [
8], where a compensator is added to an already designed controller in order to handle the saturation constraints and direct control design [
9], in which the input constraints are considered at the controller design stage.
In the vast literature addressing the saturation problem, the assumption that the saturation limits are constant in time is made, to the best of the authors’ knowledge. For example, this assumption can be found in Reference [
10], where the region of attraction of a saturated linear parameter varying (LPV) system with bounded parameter variations is optimized by means of parameter-dependent Lyapunov functions, generalized sector conditions and a static output-feedback controller. The same assumption holds in Reference [
11], where the idea is to approximate the region of attraction using the concept of quadratic boundedness, such that off-line optimization algorithms are presented to design a saturated dynamic output feedback controller for an LPV system with bounded disturbance. On other hand, in Reference [
12] the saturation phenomenon is included in the design problem of an
dynamic output-feedback controller for a class of uncertain discrete stochastic nonlinear time-varying systems using the recursive linear matrix inequality (RLMI) approach, thus obtaining a suitable algorithm for online applications.
However, from a practical viewpoint, it makes sense to consider time-varying saturation limits. They could arise in control systems due to several reasons, such as the natural wear of engines and devices, that would provide a progressively decreasing actuation signal or temporary shortages in the availability of electrical or pneumatic power. Moreover, in trajectory tracking problems, the control signal is usually obtained as the sum of a feedforward and a feedback component. When a time-varying trajectory is considered, the feedforward component changes in time, which would be perceived by the feedback controller as a time-varying saturation.
The main goal of this paper is to propose a methodology for designing state-feedback controllers that take into account time-varying input saturations. It makes sense that a change in the saturation function should be tied to a change in the performance achieved by the closed-loop control system (e.g., if the maximum possible input decreases, the system’s response should become slower). For this reason, the time-varying saturation limits are addressed using
shifting specifications, following some ideas found, for example, in References [
13,
14]. This means that some parameters are introduced which, on the one hand, they are scheduled by the time-varying saturations and, on the other hand, they schedule the performance criteria in such a way that different values of these parameters imply different performances (in this paper, we will consider the guaranteed decay rate but the developed results can be extended straightforwardly to other criteria, for example, pole clustering or
/
guaranteed bounds).
The direct consequence of introducing the above mentioned scheduling parameters is that the closed-loop system becomes a parameter-varying system and the design conditions can be determined within the framework of linear parameter varying (LPV) systems [
15,
16]. Notably, many nonlinearities can be represented as varying parameters that depend on endogenous signals, for example, states and inputs [
17], which broadens the applicability of the design methodology to nonlinear plants. Examples of successful applications of the LPV paradigm are—wind turbines [
18], vehicles [
19,
20] and drones [
21].
As in Reference [
13], the proposed approach is obtained using quadratic Lyapunov functions with constant matrices and, therefore, the results might be somehow conservative when compared to other types of Lyapunov functions, for example, parameter-dependent [
22] or piecewise [
23], which lead to more complex mathematical calculations and are beyond the scope of this paper. The final design procedure is developed using the theory of ellipsoidal invariant sets [
24]. It consists on a linear matrix inequality (LMI)-based feasibility problem, which can be solved efficiently using available solvers (the reader is referred to Reference [
25] for a tutorial on the application of LMIs to LPV analysis and design problems).
This paper is structured as follows. In
Section 2, the problem statement is introduced. In
Section 3, the procedure for controller design with constant saturation is given. In
Section 4, the proposed methodology is adapted to the case of time-varying input saturation.
Section 5 presents an illustrative example with simulation results. Finally,
Section 6 summarizes the main conclusions and discusses possible future work.
2. Problem Statement
Let us consider a continuous-time LPV system
where
is the state vector,
is the input vector and
is the scheduling parameter vector, with
known, closed and bounded set. Matrices
,
,
and
are the parameter-dependent state, input, output and feedforward matrices, respectively.
The polytopic representation of (
1) is used throughout this paper. In this representation, the system’s matrices are defined as a weighted sum of matrices that represent the system in the
N vertices of a polytope that contains
where matrices
,
,
and
define the so-called
vertex systems and
are the coefficients of the polytopical decomposition that satisfy
The time dependency of x, , y and u is dropped from now on and it will only be made explicit when necessary. Also, without loss of generality, we consider the behaviour of the system starting from a time instant . The extension to the case where is straightforward by means of a simple translation of the time axis.
The following assumptions are made on (
2):
Assumption 1. The state variables and the scheduling variables are measurable or can be estimated online.
Assumption 2. The input and output matrices are constant.
Assumption 3. System disturbances are not considered.
Assumption 4. The system (2) is stabilizable. Remark 1. Note that Assumptions 1–3 are only made for the sake of keeping the mathematical complexity somehow simpler and could be removed by extending the results presented in this paper taking into account existing techniques in the literature. For instance, inexactly measured parameters were considered by Reference [26]; the complexity arising from parameter-varying input and output matrices can be dealt with using conditions based on Polya’s theorems [27]; disturbances can be considered under a quadratic boundedness framework, see for example, Reference [28]. On the other hand, Assumption 4 is a necessary (not sufficient) condition in order to solve the controller design problem described in this paper. Note that recent work has suggested a practical test to assess this property in systems described by a polytopic representation [29]. Considering the above assumptions, the output equation can be neglected and (
2) becomes
In this paper, we consider the case in which the input signal is affected by a nonlinearity, such that the change
arises in (
4), with
denoting a symmetric saturation
where > and ≤ are meant element-wise and
is the saturation limit value, which is considered constant in
Section 3 and time-varying within the interval
in
Section 4.
The contribution of this work lies in proposing conditions to design an LPV state-feedback controller that ensures the stability of the system (
4). In order to obtain these conditions, three ellipsoidal regions are established in the state domain—region
contains the set of allowed initial conditions of the system; region
is defined by a quadratic Lyapunov function, whose unit level curve contains
; and, finally, region
corresponds to an ellipsoidal subset of the region of the state space
, in which the input
u is not saturated. These four regions satisfy the relation
On the basis of (
6) a set of LMIs that provide conditions for the design of the LPV state-feedback controller is obtained.
Remark 2. Note that the proposed design methodology considers the input to work only in its linear region, which introduces additional conservativeness. This drawback could be alleviated by scheduling the controller also with saturation indicator parameters, as suggested by Reference [30]. 3. Design with Constant Input Saturation
Let us define the state-feedback control law for (
4) as
where
is the parameter-dependent gain matrix and
,
denotes the gain matrix for each vertex
i.
Let us also define the region
as the one that determines the allowed initial states. It is defined by means of matrix
as follows
In order to consider exactly (
5) within the design, polyhedral Lyapunov functions should be considered, which adds computational complexity since the arising design conditions cannot be expressed as LMIs. For this reason, let us consider an ellipsoidal maximal volume region
contained in the hyper-rectangle described by (
5), as follows
where
,
, W is a rotation matrix that describes the axes orientation of the ellipsoid and
Hereinafter, without loss of generality, we assume that since in most of the cases the axes of the ellipsoidal region are aligned with the axes of the input space.
Note that the ellipsoid
, although defined in the input space, is mapped onto the state space as a parameter-varying ellipsoid by means of the state-feedback control law, as follows
The following theorem provides the conditions to obtain the vertex gains
that ensure the closed-loop stability with guaranteed decay rate
of the system obtained as the interconnection of (
4) and (
7).
Theorem 1. Consider the continuous time LPV system (4), the control law (7) and the regions and defined in (8) and (11), respectively, with given matrices and , and a desired . If , there exist a symmetric matrix and matrices such that the following set of LMIs is feasibleand the vertex gains of the LPV state-feedback controller are calculated as . Then the closed-loop system obtained as the interconnection of (4) and (7) is stable and has a guaranteed decay rate α. Moreover, the control law computed as (7) is such that . Proof. By defining the quadratic Lyapunov function,
, where
, the closed-loop stability inequality is obtained for each vertex
i from the condition
where
is obtained by means of a change of variable, as follows
The term
can be added to the inequalities (
16) to ensure a guaranteed decay rate of the derivative of the Lyapunov function, which can be used to tune the closed-loop transient properties [
24], thus obtaining (
13).
Thereupon, let us introduce the ellipsoidal region
, which corresponds to the unit level curve of the Lyapunov function
By introducing an inclusion relation between
and
, one can guarantee that, as long as the system is working in the linear region of the saturation function, any state trajectory
which starts from an initial state contained in
will necessarily remain inside region
. In particular, the inclusion
can be expressed by the following inequality
which, by means of appropriate manipulations, leads to
and, by means of Schur complements, leads to (
14).
Finally, taking into account the inclusion
, we can guarantee that any state trajectory contained in the unit level curve of the Lyapunov function will also lie in the region of linearity of the actuators, such that no saturation occurs and, hence, convergence of
x to 0 when
is ensured for any
(hence, for any
). In particular, the above inclusion is described by
Applying (
17) to (
21), the following inequality is obtained
and applying the Schur complement to (
22) one gets (
15) □
Remark 3. Note that the quadratic Lyapunov function used in the proof of the Theorem 1 introduces conservativeness due to the constant matrix P. The conservativeness can be decreased by modifying through a parameter-dependent matrix , although such modification would add computational complexity to the LMI problem.
4. Design with Time-Varying Input Saturation
Following some ideas that appeared in Reference [
13], we adapt the controller’s design to deal with time-varying input saturation limits. In the proposed method, we add a new scheduling parameter vector to describe changes in time of the saturation function and we use it to schedule both the controller and the achieved performance. More specifically, the vector of varying parameters
in (
4), is augmented with another vector
that is linked to
by the following relation
Note that the values of
, calculated as in (
23) are constrained to belong to the interval
. Also note that (
23) can be used to express
as a function of
, as follows
As a consequence, the expression for
in the input space becomes
and, taking into account the new scheduling parameters, let us modify (
7) as follows
Similar to the previous section, the region
is mapped onto the state domain as a parameter-varying ellipsoid by means of the new state-feedback control law (
26), as follows
The following theorem, akin to Theorem 1, provides the conditions to obtain the vertex gains
of the LPV state-feedback controller (
26) that ensure the closed-loop stability of the system (
4) and the ability to change the guaranteed decay rate according to changes in the time-varying saturation limits.
Theorem 2. Consider the continuous time LPV system (4), the control law (26) and the regions and of the state space described by (8) and (27), respectively, with given matrices and , and a desired parameter-varying decay rate that varies within the interval . Assume that parameter-dependent matrix and the function can be expressed in polytopic form as followswhere M is the number of vertices of Φ
. If , there exist a symmetric matrix and matrices such that the following set of LMIs is feasible and the vertex gains of the LPV state-feedback controller are calculated as . Then the closed-loop system obtained as the interconnection of (4) and (26) is stable and has guaranteed decay rate . Moreover, the control law computed as (26) is such that . Proof. Theorem 2 ensures the closed-loop system’s stability in the same way as Theorem 1, adding the adaptive capacity of the controller to decrease the closed-loop performance when the saturation limits decrease. Hereunder, a sketch of this proof is presented.
By defining the same quadratic Lyapunov function of Theorem 1 with the constraint (
30) and the control law (
26), the closed-loop stability inequality is obtained for each value of
and
from the condition
where
.
Additionally, (
29) is added to (
34) through the parameter-dependent term
in order to adjust online the closed-loop performance depending on the instantaneous saturation limits. As a consequence, we ensure a guarantee decay rate of
that varies within the interval
, thus obtaining
that can be described by (
31) for each vertex
and
of
and
, respectively.
Thereupon, let us consider the regions (
8) and (
18) and the inclusion
described by (
19) to obtain (
32).
Finally, by means of appropiate manipulations and the application of Schur complements, the inclusion
leads to the following inequality
that can be described by (
33) for each vertex as mentioned above. □
Note that the polytopical representation of
described by (
28) is valid for
given by the following
In this case, the polytopic weights appearing in (
28) and (
29) are calculated as follows
where
Additionally, the vertex coefficients
of
can be obtained as follows
where
and
denotes the cardinality of the set
.
Remark 4. Note that, in this paper, for illustrative purposes and to maintain the overall formulation simple, we have decided to consider a scheduled guaranteed decay rate as performance criterion but the results could be generalized to other criteria, for example, sector clusters in the complex plane to avoid undesired oscillations [31]. 5. Illustrative Example
In this section, an illustrative example is introduced to show the closed-loop performance of an LPV state-feedback controller, designed with Theorem 2, under time-varying input saturation limits. Note that the results corresponding to an LPV controller designed using Theorem 1 are omitted because they can be considered a particular case of
Section 4 in which the saturation scheduling variables are frozen.
Figure 1 presents the followed control-loop scheme throughout the example.
Let us consider the LPV plant modelled as in (
1) with the following state-space matrices (note that the system is open-loop unstable for every frozen value of
)
where
B,
C and
D are constant due to Assumptions 2 and 3,
and the parameter-varying state matrix
can be written in the polytopic form (
2) with vertex state matrices
Let us consider a time-varying input saturation, where the saturation limits of and are and respectively.
Following the method described in
Section 4, the LPV state-feedback controller
is scheduled by the following parameters
The controller’s design is obtained solving the LMIs (
30)–(
33) of Theorem 2, which are particularized as follows
where
and
R has been chosen as
so that the expected initial condition for the system lies in a circle centered in the origin of the state space, with radius 0.1. On the other hand the polytopical expression of (
29) for
is
and it is chosen to vary within the interval
obtaining the following coefficients through (
40)
Finally, taking into account the variability of
and
, the matrices
are given by
By using the SeDuMi solver [
32] and the YALMIP [
33] toolbox, we find a solution of (
45) that, through
, allows us to calculate the eight controller vertex gains.
Hereafter, two different scenarios are used to show that the designed LPV state-feedback controller is able to guarantee the closed-loop system stability and its capacity to adapt its performance taking into account the time-varying limits of the input saturation.
5.1. Scenario I
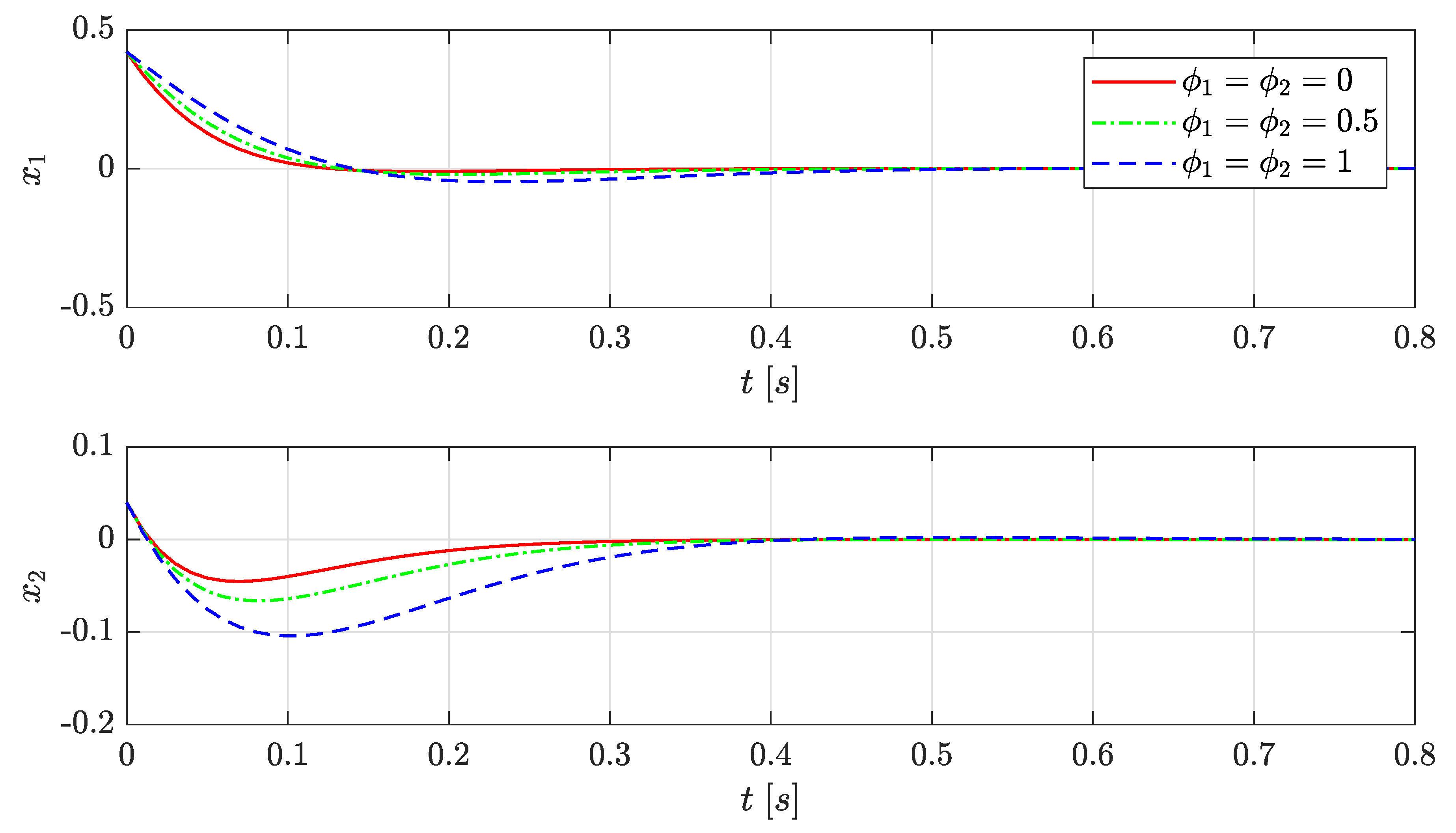
The purpose of Scenario I is to evaluate the closed-loop system stability and its closed-loop performance for a given initial condition with three different constant values of the control input saturation. To do this, we simulate the closed-loop response from an initial state and . Finally, fixing the frozen values of , and , thus obtaining instantaneous saturation limits values and , and and and , respectively.
As shown in
Figure 2, the closed-loop system stability is guaranteed for all the values of
and
that were mentioned. Moreover, note that the system’s response that was evaluated with the scheduling parameters
, corresponds to the maximum allowed limit values of
and
, obtaining the fastest system response and showing that the designed LPV state-feedback controller is able to adjust the system’s performance depending on the different values taken by
.
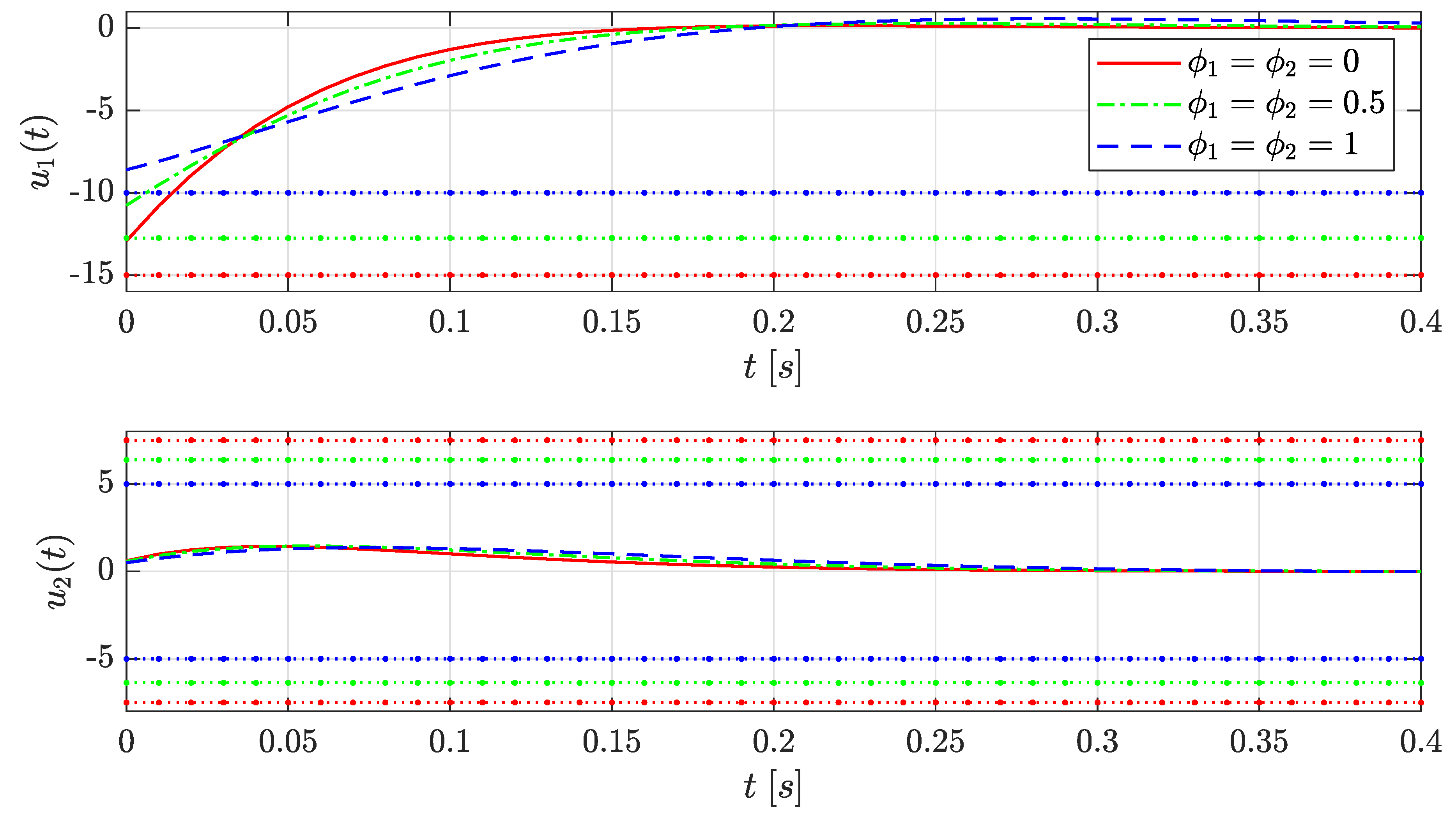
Figure 3 shows the instantaneous values of the saturation limit of
and
for the three frozen values of
and
and the evolution of the control signals. For illustrative purposes, since the signal
takes only negative values during the system’s response, only the lower bound of the saturation is plotted. As a variation of the saturation limit occurs, the input signal changes as a result of the adaptability capacity of the designed controller. For example, the interval of linearity of the control signal
corresponds to
when
and to
when
. Note that if the controller gain corresponding to
had been used for the case in which
, then saturation would have occurred.
Figure 4 shows the evolution of the Lyapunov function
for the three frozen values of
and
, which correspond to guaranteed decay rates of 10, 5.5 and 1 respectively. It can be seen that the largest decay rate corresponds to the fastest closed-loop system response, whose saturation scheduling parameters are
and
. Also, all the functions are under the unit value, hence it is guaranteed by design that none of the control inputs saturates, as already shown in
Figure 3.
5.2. Scenario II
Scenario II shows the adaptability of the designed controller to changes in along the transient response of the closed-loop. We consider and . Also, we fix and we vary such that it switches between its known limits and .
Figure 5 shows that the designed LPV state-feedback controller is able to adapt the generated control signal
taking into account the changes in
.
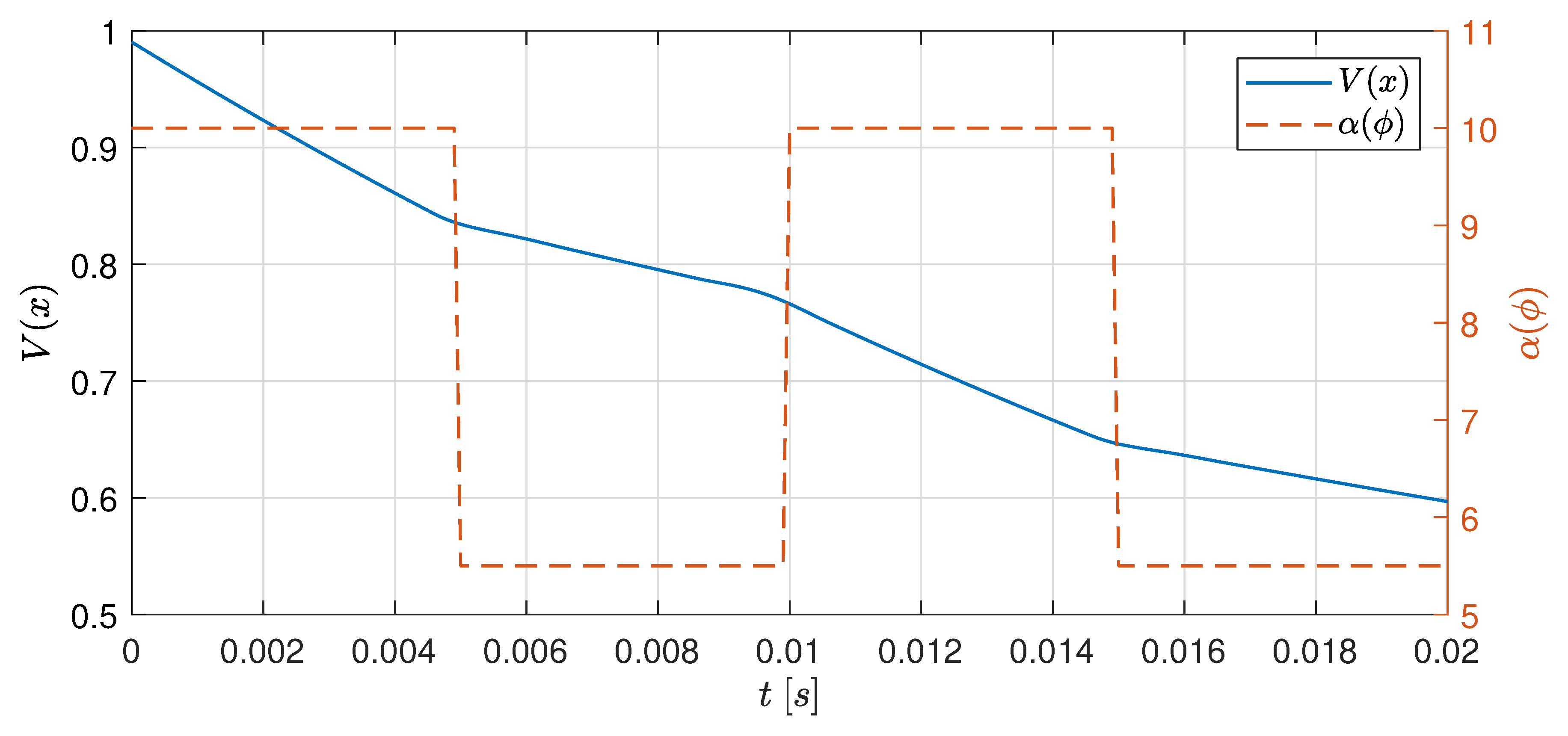
Figure 6 shows the evolution of the Lyapunov function
, which decreases slower when the guaranteed decay rate
, as a result of fixing
and faster when
. As a consequence, the closed-loop system performance is modified online according to changes in the saturation limits.
6. Conclusions and Future Work
In this paper, the problem of designing an LPV state-feedback controller that takes into account the time-varying saturation limits has been investigated. The design procedure corresponds to checking the feasibility of an appropriate set of LMIs, which can be solved efficiently using available solvers. Finally, the results obtained in the illustrative example correspond to the case where the LPV state-feedback controller designed following the proposed methodology is evaluated in an LPV mathematical system with time-varying boundaries, showing that the controller guarantees the closed-loop stability and its capacity of adjusting the system’s performance in front of the variability of the saturation limits.
Future work will focus on applying the procedure described in this paper to design an LPV controller using robust control techniques combined with a model reference control for UAV vehicles. Moreover, in order to deal with exogenous disturbances, for example, wind gusts in the application of UAV control, the results presented in this paper will be extended to the case where disturbance rejection is considered.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





