Non-Linear Vibration Isolators with Unknown Excitation and Unmodelled Dynamics: Sliding Mode Active Control



Abstract
1. Introduction
2. Force Controller Design
3. Active Control of a Quasi-Zero-Stiffness Isolator
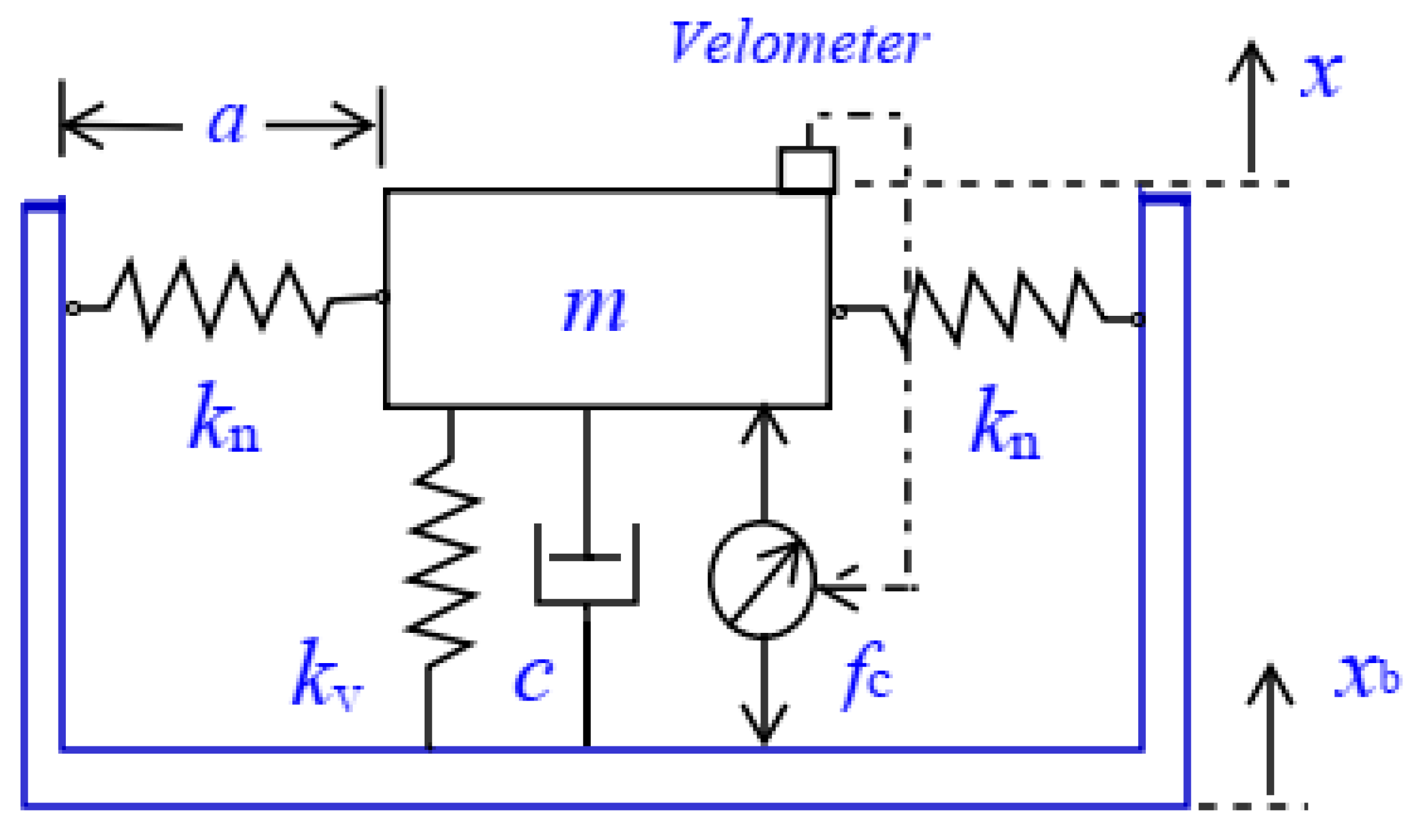
3.1. Description of a Quasi-Zero-Stiffness Isolator
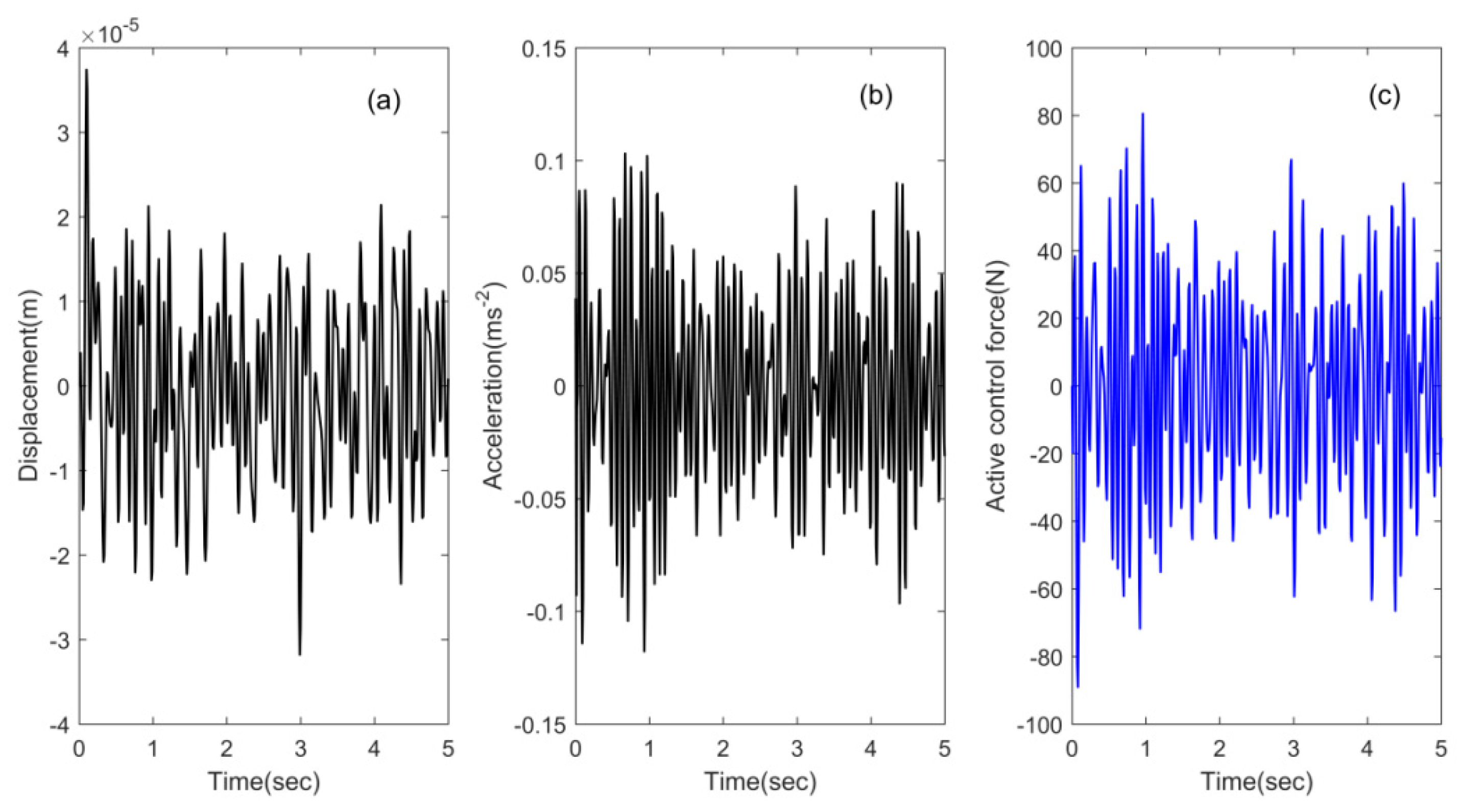
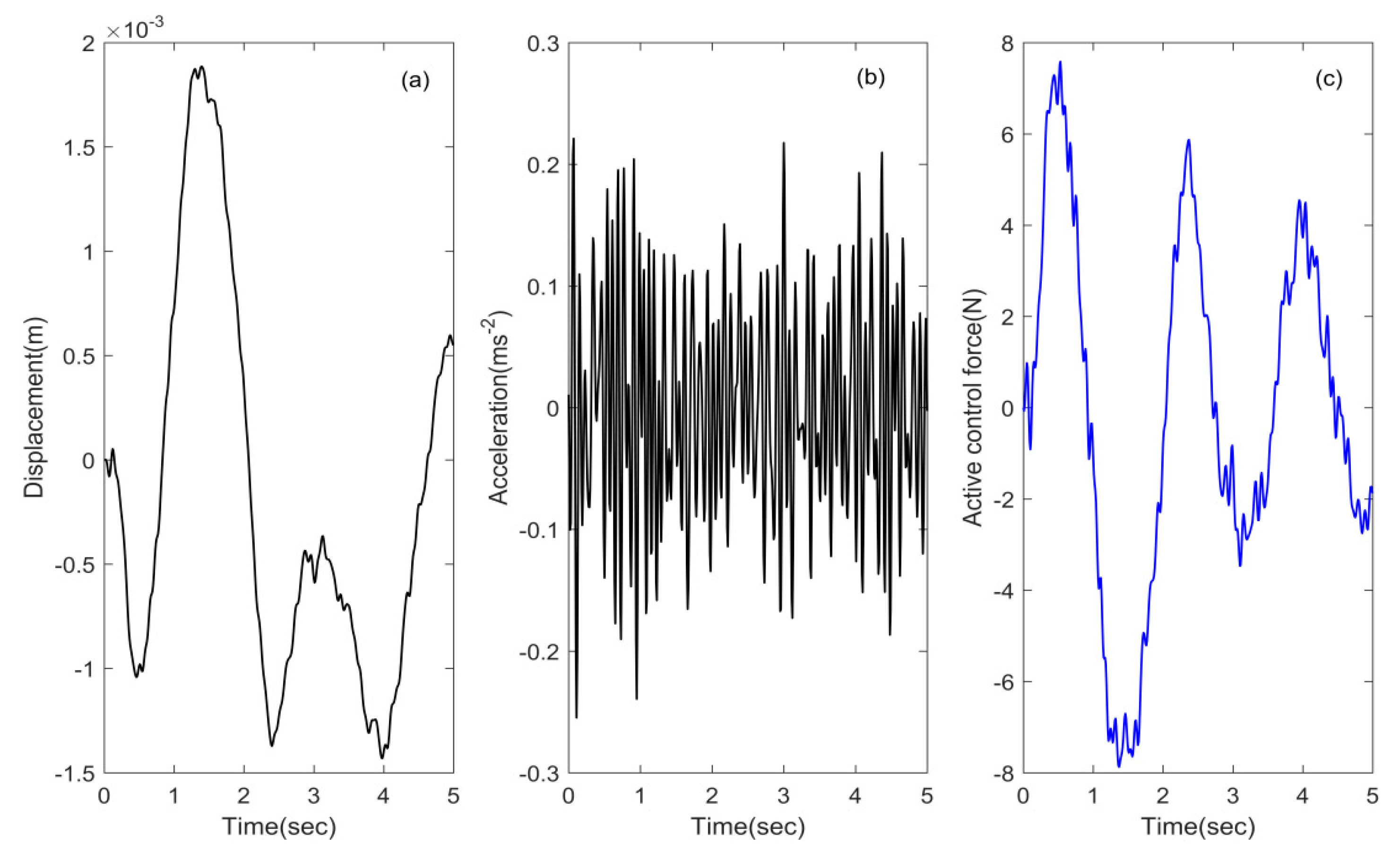
3.2. Simulation Results and Analyses
3.3. Additional Comments
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ibrahim, R.A. Recent advances in non-linear passive vibration isolators. J. Sound Vib. 2008, 314, 371–452. [Google Scholar] [CrossRef]
- Hundal, M.S. Response of shock isolators with linear and quadratic damping. J. Sound Vib. 1981, 76, 273–281. [Google Scholar] [CrossRef]
- Ravindra, B.; Mallik, A.K. Performance of non-linear vibration isolators under harmonic excitation. J. Sound Vib. 1994, 170, 325–337. [Google Scholar] [CrossRef]
- Amer, Y.A.; EL-Sayed, A.T. Vibration suppression of non-linear system via non-linear absorber. Commun. Non-linear Sci. Numer. Simul. 2008, 13, 1948–1963. [Google Scholar] [CrossRef]
- Peng, Z.; Lang, Z.; Jing, X.; Billings, S.; Tomlinson, G.; Guo, L. The transmissibility of vibration isolators with a non-linear antisymmetric damping characteristic. J. Vib. Acoust. 2010, 132, 014501. [Google Scholar] [CrossRef]
- Huang, X.; Sun, J.; Hua, H.; Zhang, Z. The isolation performance of vibration systems with general velocity-displacement-dependent non-linear damping under base excitation numerical and experimental study. Non-linear Dyn. 2016, 85, 777–796. [Google Scholar] [CrossRef]
- Kolovsky, M.Z. Non-linear Dynamics of Active and Passive Systems of Vibration Protection; Springer: Berlin, Germany, 1999. [Google Scholar]
- Dantas, M.; Balthazar, J. A comment on a nonideal centrifugal vibrator machine behavior with soft and hard springs. Int. J. Bifurc. Chaos 2006, 16, 1083–1088. [Google Scholar] [CrossRef]
- Tusset, A.; Balthazar, J. On the chaotic suppression of both ideal and non-ideal duffing based vibrating systems, using a magnetorheological damper. Differ. Eq. Dyn. Syst. 2013, 21, 105–121. [Google Scholar] [CrossRef]
- Kovacic, I.; Brennan, M.J.; Waters, T.P. A study of a non-linear vibration isolator with a quasi-zero stiffness characteristic. J. Sound Vib. 2008, 315, 700–711. [Google Scholar] [CrossRef]
- Ahn, H.J. Performance limit of a passive vertical isolator. J. Mec. Sci. Technol. 2008, 22, 2357–2364. [Google Scholar] [CrossRef]
- Carrella, A.; Brennan, M.J.; Waters, T.P. Static analysis of a passive vibration isolation with quasi zero-stiffness characteristic. J. Sound Vib. 2007, 301, 678–689. [Google Scholar] [CrossRef]
- Carrella, A.; Brennan, M.J.; Waters, T.P., Jr.; Lopes, V. Force and displacement transmissibility of a non-linear isolator with high-static-low-dynamicstiffness. Int. J. Mech. Sci. 2012, 55, 22–29. [Google Scholar] [CrossRef]
- Zhou, N.; Liu, K. A tunable high-static-low-dynamic stiffness vibration isolator. J. Sound Vib. 2010, 329, 1254–1273. [Google Scholar] [CrossRef]
- Robertson, W.S.; Kidner, M.R.F.; Cazzolato, B.S.; Zander, A.C. Theoretical design parameters for a quasi-zero stiffness magnetic spring for vibration isolation. J. Sound Vib. 2009, 326, 88–103. [Google Scholar] [CrossRef]
- Xu, D.L.; Yu, Q.P.; Zhou, J.X.; Bishop, S.R. Theoretical and experimental analyses of a non-linear magnetic vibration isolator with quasi-zero-stiffness characteristic. J. Sound Vib. 2013, 332, 3377–3389. [Google Scholar] [CrossRef]
- Liu, X.T.; Huang, X.C.; Hua, H.X. On the characteristics of a quasi-zero stiffness isolator using Euler buckled beam as negative stiffness corrector. J. Sound Vib. 2013, 332, 3359–3376. [Google Scholar] [CrossRef]
- Yang, J.; Xiong, Y.P.; Xing, J.T. Dynamics and power flow behaviour of a non-linear vibration isolation system with a negative stiffness mechanism. J. Sound Vib. 2013, 332, 167–183. [Google Scholar] [CrossRef]
- Huang, X.C.; Liu, X.T.; Sun, J.Y.; Zhang, Z.Y.; Hua, H.X. Effect of the system imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolator. Non-linear Dyn. 2014, 76, 1157–1167. [Google Scholar] [CrossRef]
- Cheng, C.; Li, S.; Wang, Y.; Jiang, X. Resonance of a quasi-zero stiffness vibration system under base excitation with load mismatch. Int. J. Struct. Stab. Dyn. 2017, 17, 1850002. [Google Scholar] [CrossRef]
- Abolfathi, A.; Brennan, M.J.; Waters, T.P.; Tang, B. On the effects of mistuning a force-excited system containing a quasi-zero-stiffness vibration isolator. J. Vib. Acoust 2015, 137, 044502. [Google Scholar] [CrossRef]
- Valeev, A. Dynamics of a group of quasi-zero stiffness vibration isolators with slightly different parameters. J. Low Freq. Noise Vib. Active Control 2018, 37, 640–653. [Google Scholar] [CrossRef]
- Sun, X.T.; Xu, J.; Jing, X.J.; Cheng, L. Beneficial performance of a quasi-zero-stiffness vibration isolator with time-delayed active control. Int. J. Mech. Sci. 2014, 82, 32–40. [Google Scholar] [CrossRef]
- Cheng, C.; Li, S.; Wang, Y.; Jiang, X. On the analysis of a high-static-low-dynamic stiffness vibration isolator with time-delayed cubic displacement feedback. J. Sound Vib. 2016, 378, 76–91. [Google Scholar] [CrossRef]
- Wang, Y.; Li, S.; Cheng, C.; Jiang, X. Dynamic analysis of a high-static-low-dynamic-stiffness vibration isolator with time-delayed feedback control. Shock Vib. 2015, 712851. [Google Scholar] [CrossRef][Green Version]
- Slotine, J.J.; Li, W. Applied Non-Linear Control; Prentice Hall Inc.: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Utkin, V.I.; Guldner, J.; Shi, J. Sliding Mode Control in Electromechanical Systems; Taylor & Francis: London, UK, 1999. [Google Scholar]
- Pai, M.-C. Robust tracking and model following of uncertain dynamic systems via discrete-time integral sliding mode control. Int. J. Control Autom. Syst. 2009, 7, 381–387. [Google Scholar] [CrossRef]
- Aghababa, M.P.; Akbari, M.E. A chattering-free robust adaptive sliding mode controller for synchronization of two different chaotic systems with unknown uncertainties and external disturbances. Appl. Math. Computat. 2012, 218, 5757–5768. [Google Scholar] [CrossRef]
- Bartolini, G.; Pisano, A.; Punta, E.; Usai, E. A survey of applications of second order sliding mode control to mechanical systems. Int. J. Control 2003, 76, 875–892. [Google Scholar] [CrossRef]
- Liu, J. Sliding Mode Control Using Matlab; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Eker, İ. Second-order sliding mode control with experimental application. ISA Trans. 2010, 49, 394–405. [Google Scholar] [CrossRef] [PubMed]
- Levant, A. Principles of 2-sliding mode design. Automatica 2007, 43, 576–586. [Google Scholar] [CrossRef]
- Lai, C.Y.; Liao, W.H. Vibration Control of a Suspension System via a Magnetorheological Fluid Damper. J. Vib. Control 2002, 8, 527–547. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Active Hybrid Isolator and Passive Isolator | Response and Control Force (RMS) | ||
|---|---|---|---|
| Acceleration (ms−2) | Displacement (m) | Control Force (N) | |
| With control force (6) | 0.0431 | 1.1326×10−5 | 30.02 |
| With control force (12) | 0.0845 | 0.0014 | 4.03 |
| Passive isolator | 0.0924 | 0.0026 | null |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, K.-W.; Hu, Z.-G.; Liu, H.-M.; Ouyang, H.; Zhang, J.-F. Non-Linear Vibration Isolators with Unknown Excitation and Unmodelled Dynamics: Sliding Mode Active Control. Appl. Sci. 2019, 9, 3567. https://doi.org/10.3390/app9173567
Zhang K-W, Hu Z-G, Liu H-M, Ouyang H, Zhang J-F. Non-Linear Vibration Isolators with Unknown Excitation and Unmodelled Dynamics: Sliding Mode Active Control. Applied Sciences. 2019; 9(17):3567. https://doi.org/10.3390/app9173567
Chicago/Turabian StyleZhang, Ke-Wei, Zhi-Gang Hu, Hai-Min Liu, Huajiang Ouyang, and Jia-Fan Zhang. 2019. "Non-Linear Vibration Isolators with Unknown Excitation and Unmodelled Dynamics: Sliding Mode Active Control" Applied Sciences 9, no. 17: 3567. https://doi.org/10.3390/app9173567
APA StyleZhang, K.-W., Hu, Z.-G., Liu, H.-M., Ouyang, H., & Zhang, J.-F. (2019). Non-Linear Vibration Isolators with Unknown Excitation and Unmodelled Dynamics: Sliding Mode Active Control. Applied Sciences, 9(17), 3567. https://doi.org/10.3390/app9173567