Numerical Investigation of Multi-SDBD Plasma Actuators for Controlling Fluctuating Wind Load on Building Roofs


Abstract
1. Introduction
2. Modeling and Numerical Methods
2.1. Conservation Equations
2.2. Numerical Model for Body Force Generation
2.3. Reference Model and Computational Method
3. Verification and Validation
4. Results and Discussion
4.1. Plasma Actuators in Quiescent Air
4.2. Flow Control of Plasma Actuators in Flowing Air
5. Conclusions
- (1)
- The mean drag coefficient is not significantly affected by these configurations, because the actuators are only placed on the roof. In all configurations, the configuration with the near-wall jet direction from the trailing edge to the leading edge (i.e., case A) has a noticeable reduction of mean lift coefficient. The fluctuating lift and fluctuating drag coefficients can be significantly reduced by these configurations owing to the decline of the strength and size of the shedding vortices.
- (2)
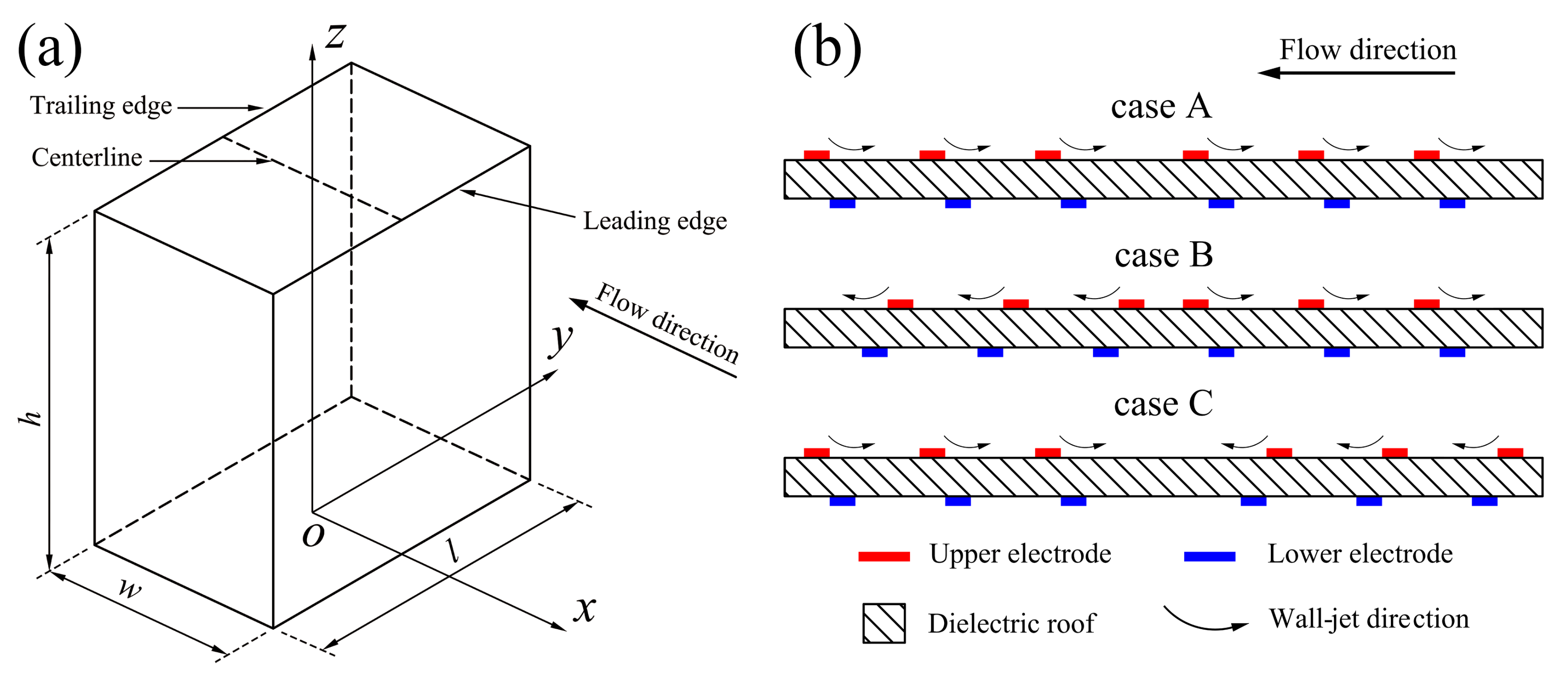
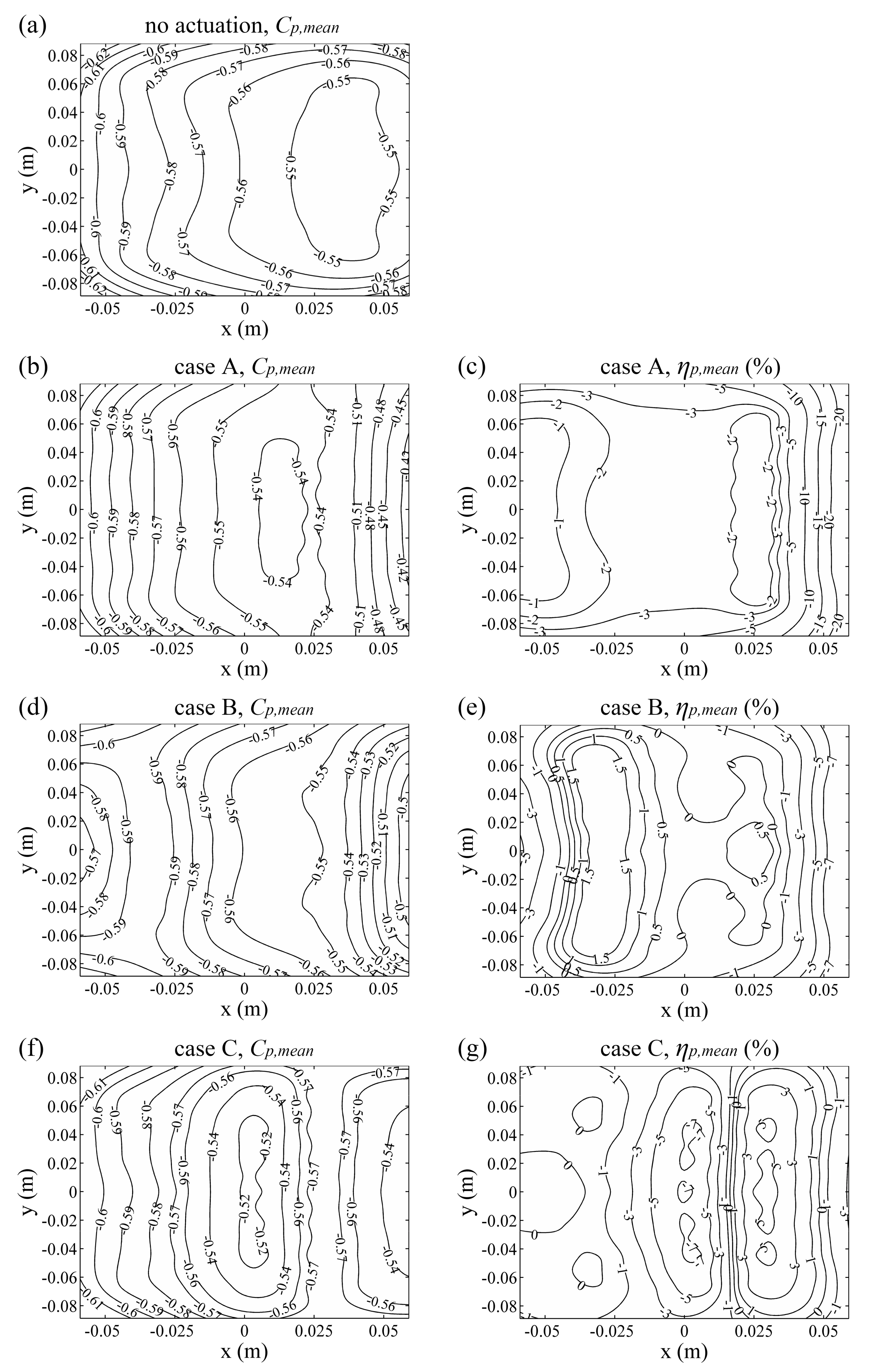
- The roof area location with the reduced mean pressure coefficient is determined by the near-wall jet direction. Each single-SDBD plasma actuator can absorb the near-wall flow upstream of the actuator, and meanwhile can blow the flow downstream, resulting in the fact that the wall jet exerts a pressure on the downstream near-wall flow. Under the action of multi-SDBD plasma actuators, the wall jet is continuously accelerated to obtain the greatest momentum at the end and to exert the maximum pressure on the local roof area, leading to the apparent reduction of the mean pressure coefficient absolute value. This is also the reason why the limited roof regions with the reduced absolute value are located precisely at the end of the wall jet. Results show that under the effect of the wall jet blowing from the trailing edge to the leading edge (i.e., case A), the maximum reduction ratio of the mean pressure coefficient absolute value can reach 20% near the leading edge. Also, the pressure effect of multi-SDBD plasma actuators is far greater than their suction effect.
- (3)
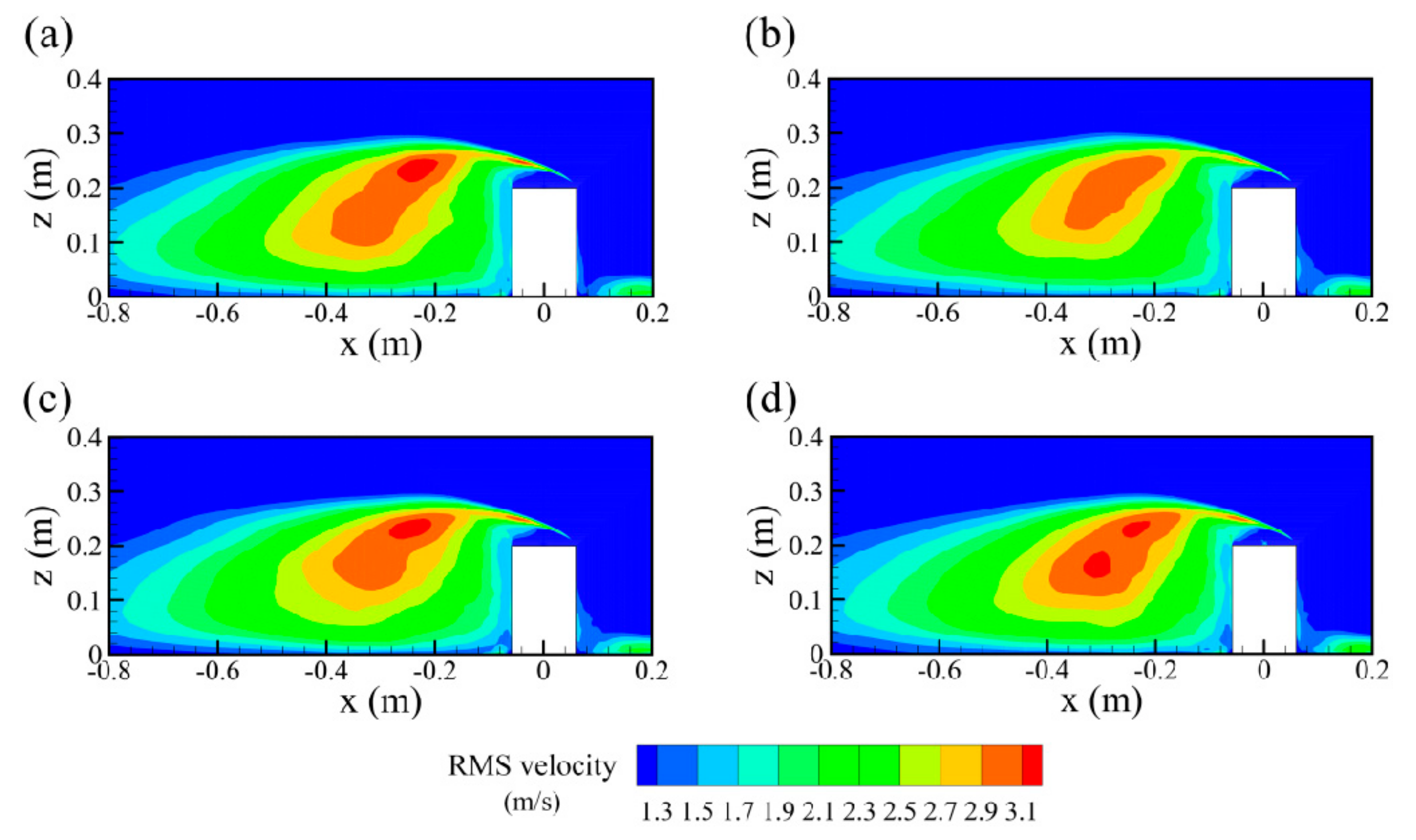
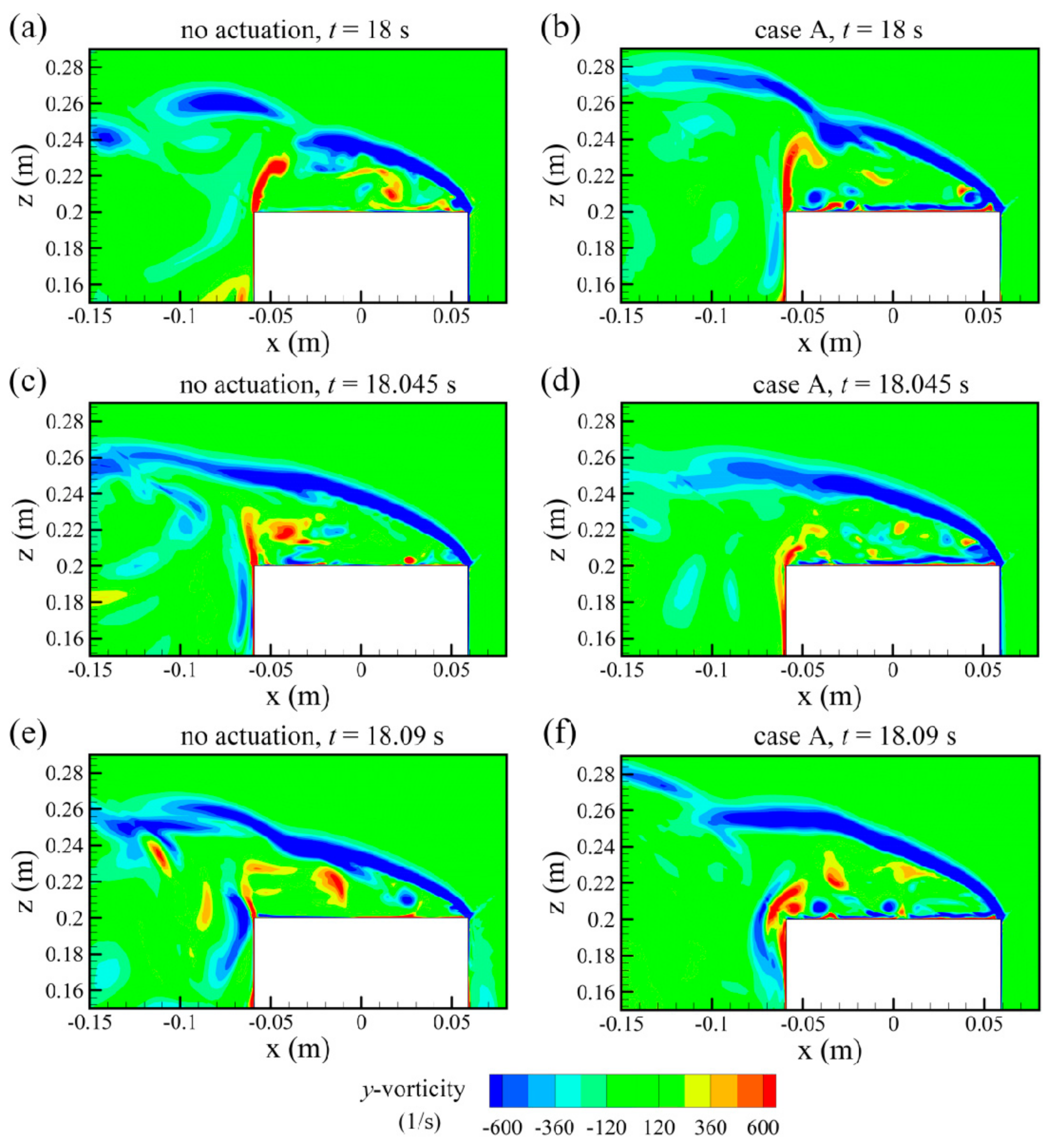
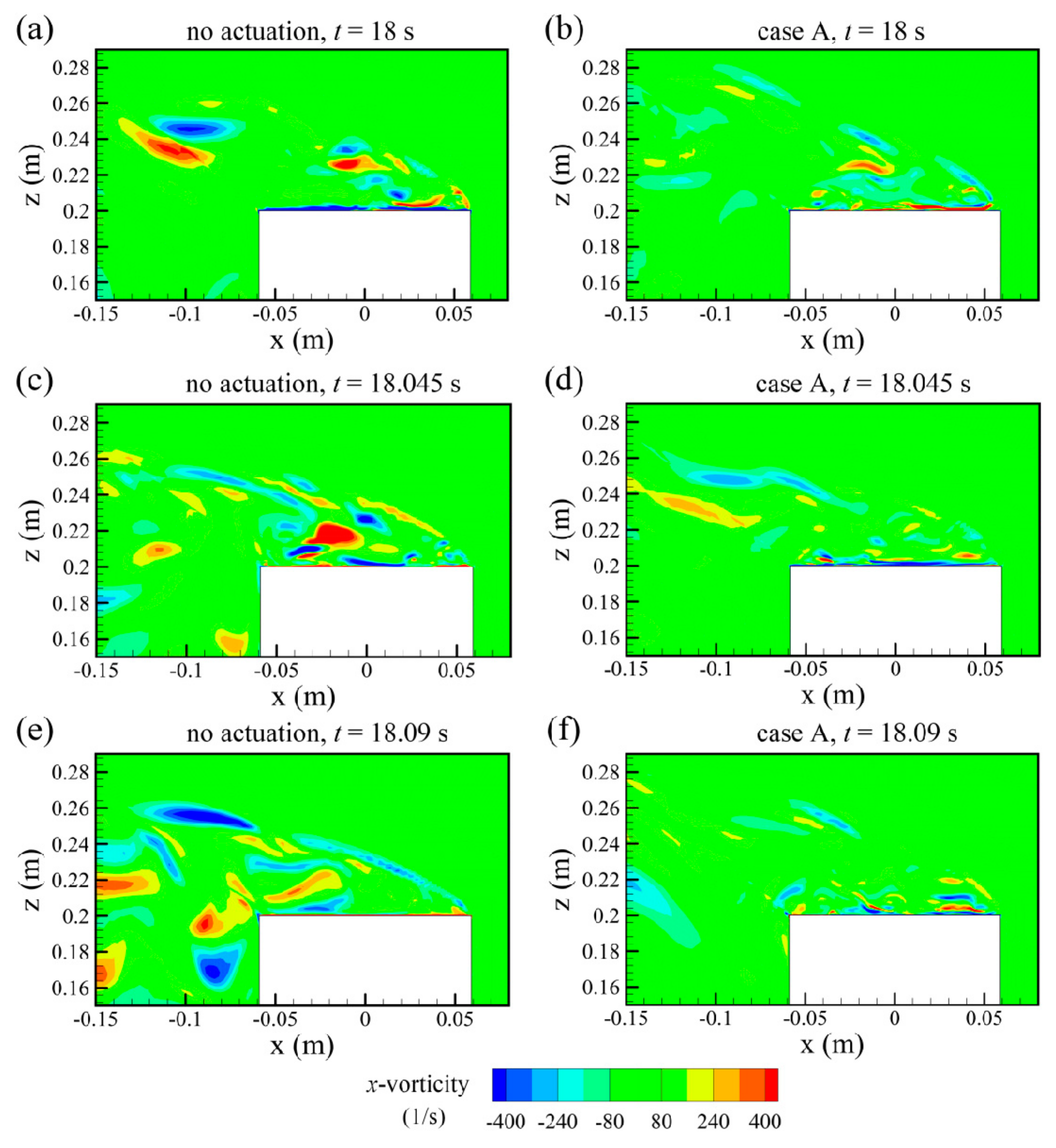
- The influence of the wall jet on the shedding vortices is the key to understanding the reduction of the fluctuating pressure coefficient. In the recirculation region, the effect of the active actuators on the near-wall flow is much stronger than that of the incoming flow. Under the action of the wall jet, the small-scale spanwise vortices appear on the roof. These vortices suppress the intensity and size of streamwise shedding vortices produced by the flow separation at the leading edge, resulting in a reduction of the fluctuating pressure coefficient on most roof areas. Results show that after the actuators are ignited, the fluctuating pressure coefficient can be reduced by 20% at most from the no actuation situation.
Author Contributions
Funding
Conflicts of Interest
References
- Yuan, K.; Hui, Y.; Chen, Z. Effects of facade appurtenances on the local pressure of high-rise building. J. Wind. Eng. Ind. Aerodyn. 2018, 178, 26–37. [Google Scholar] [CrossRef]
- Bitsuamlak, G.T.; Warsido, W.; Ledesma, E.; Chowdhury, A.G. Aerodynamic Mitigation of Roof and Wall Corner Suctions Using Simple Architectural Elements. J. Eng. Mech. 2013, 139, 396–408. [Google Scholar] [CrossRef]
- Aly, A.-M.; Bresowar, J. Aerodynamic mitigation of wind-induced uplift forces on low-rise buildings: A comparative study. J. Build. Eng. 2016, 5, 267–276. [Google Scholar] [CrossRef]
- Li, G.; Gan, S.; Li, H. Wind Pressure Mitigation on Gable Roofs for Low-Rise Buildings Using Spoilers. J. Struct. Eng. 2018, 144, 04018104. [Google Scholar] [CrossRef]
- Zhang, H.; Xin, D.; Ou, J. Steady suction for controlling across-wind loading of high-rise buildings. Struct. Des. Tall Spéc. Build. 2016, 25, 785–800. [Google Scholar] [CrossRef]
- Wang, J.; Xu, Y.; Tian, Y. Active control of circular cylinder flow by affiliated rotating cylinders. Sci. China Ser. E Technol. Sci. 2013, 56, 1186–1197. [Google Scholar] [CrossRef]
- Qu, Y.; Sun, M.; Feng, L.; Pan, C.; Gao, Q.; He, G.; Wang, J. Wake vortex evolution of square cylinder with a slot synthetic jet positioned at the rear surface. J. Fluid Mech. 2017, 812, 940–965. [Google Scholar] [CrossRef]
- Kriegseis, J.; Möller, B.; Grundmann, S.; Tropea, C. Capacitance and power consumption quantification of dielectric barrier discharge (DBD) plasma actuators. J. Electrost. 2011, 69, 302–312. [Google Scholar] [CrossRef]
- Maden, I.; Maduta, R.; Kriegseis, J.; Jakirlić, S.; Schwarz, C.; Grundmann, S.; Tropea, C. Experimental and computational study of the flow induced by a plasma actuator. Int. J. Heat Fluid Flow 2013, 41, 80–89. [Google Scholar] [CrossRef]
- Dong, L.; Gao, G.; Peng, K.; Wei, W.; Li, C.; Wu, G. Effects of surface dielectric barrier discharge on aerodynamic characteristic of train. AIP Adv. 2017, 7, 075112. [Google Scholar] [CrossRef]
- Kopiev, V.F.; Kazansky, P.N.; Kopiev, V.A.; Moralev, I.A.; Zaytsev, M.Y.; Kazansky, P.; Moralev, I.; Zaytsev, M. HF DBD Plasma Actuators for Reduction of Cylinder Noise in Flow. J. Phys. D Appl. Phys. 2017, 50, 475204. [Google Scholar] [CrossRef]
- Sidorenko, A.A.; Budovskiy, A.D.; Maslov, A.A.; Postnikov, B.V.; Zanin, B.Y.; Zverkov, I.D.; Kozlov, V.V. Plasma control of vortex flow on a delta wing at high angles of attack. Exp. Fluids 2013, 54, 1–12. [Google Scholar] [CrossRef]
- Kotsonis, M.; Ghaemi, S. Experimental and numerical characterization of a plasma actuator in continuous and pulsed actuation. Sens. Actuators A Phys. 2012, 187, 84–94. [Google Scholar] [CrossRef]
- Shyy, W.; Jayaraman, B.; Andersson, A. Modeling of glow discharge-induced fluid dynamics. J. Appl. Phys. 2002, 92, 6434–6443. [Google Scholar] [CrossRef]
- Rizzetta, D.P.; Visbal, M.R. Large Eddy Simulation of Plasma-Based Control Strategies for Bluff Body Flow. AIAA J. 2009, 47, 717–729. [Google Scholar] [CrossRef]
- Zhang, Z.; Feng, L.; Wang, J.; Liu, P. Gurney-Flap Drag Penalty Reduction with a DBD Plasma Actuator. J. Aerosp. Eng. 2017, 30, 4017060. [Google Scholar] [CrossRef]
- Rizzetta, D.; Visbal, M. Plasma flow control simulations of a low-Reynolds number low-aspect-ratio wing. Comput. Fluids 2012, 70, 95–114. [Google Scholar] [CrossRef]
- Zhang, P.F.; Yan, B.; Liu, A.B.; Wang, J.J. Numerical Simulation on Plasma Circulation Control Airfoil. AIAA J. 2010, 48, 2213–2226. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Z.; Wang, C.; Hu, J.; Zhou, L. Experimental and numerical analyses of multi-DBD plasma actuators to reduce wind loads and modify local flow on the roofs of low-rise buildings. AIP Adv. 2018, 8, 095314. [Google Scholar] [CrossRef]
- Abdulqadir, S.A.; Iacovides, H.; Nasser, A. The physical modelling and aerodynamics of turbulent flows around horizontal axis wind turbines. Energy 2016, 119, 1–33. [Google Scholar] [CrossRef]
- Shieh, T.-H. Study of influencing characteristics on boundary-layer separation controlled by using DBD plasma actuator with modified model. Int. J. Heat Mass Transf. 2017, 113, 1212–1233. [Google Scholar] [CrossRef]
- Mou, B.; He, B.-J.; Zhao, D.-X.; Chau, K.-W. Numerical simulation of the effects of building dimensional variation on wind pressure distribution. Eng. Appl. Comput. Fluid Mech. 2017, 11, 293–309. [Google Scholar] [CrossRef]
- Liu, J.; Niu, J. CFD simulation of the wind environment around an isolated high-rise building: An evaluation of SRANS, LES and DES models. Build. Environ. 2016, 96, 91–106. [Google Scholar] [CrossRef]
- Meng, F.-Q.; He, B.-J.; Zhu, J.; Zhao, D.-X.; Darko, A.; Zhao, Z.-Q. Sensitivity analysis of wind pressure coefficients on CAARC standard tall buildings in CFD simulations. J. Build. Eng. 2018, 16, 146–158. [Google Scholar] [CrossRef]
- Santhanakrishnan, A.; Jacob, J.D.; Suzen, Y. Flow control using plasma actuators and linear/annular plasma synthetic jet actuators. In Proceedings of the 3rd AIAA Flow Control Conference, San Francisco, CA, USA, 5–8 June 2006. [Google Scholar]
- Ebrahimi, A.; Movahhedi, M. Power improvement of NREL 5-MW wind turbine using multi-DBD plasma actuators. Energy Convers. Manag. 2017, 146, 96–106. [Google Scholar] [CrossRef]
- Terres-Nicoli, J.M.; Kopp, G.A. Mechanisms of the vertical vortex induced vibration of the Storebælt Bridge. In Proceedings of the 11th Americas Conference on Wind Engineering, San Juan, Puerto Rico, 22–26 June 2009. [Google Scholar]
- Castro, I.P.; Robins, A.G. The flow around a surface-mounted cube in uniform and turbulent streams. J. Fluid Mech. 1977, 79, 307–335. [Google Scholar] [CrossRef]
- Ito, S.; Okuda, Y.; Kikitsu, H.; Ohashi, M.; Taniguchi, T.; Taniike, Y. Experimental study on flow and pressure fields over the roof of a cube by PIV measurements. In Proceedings of the Fourth International Symposium on Computational Wind Engineering, Yokohama, Japan, 16–19 July 2006; pp. 435–438. [Google Scholar]
- Xin, D.; Zhang, H.; Ou, J. Secondary wake instability of a bridge model and its application in wake control. Comput. Fluids 2018, 160, 108–119. [Google Scholar] [CrossRef]
- Tominaga, Y.; Akabayashi, S.-I.; Kitahara, T.; Arinami, Y. Air flow around isolated gable-roof buildings with different roof pitches: Wind tunnel experiments and CFD simulations. Build. Environ. 2015, 84, 204–213. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid No. | Mesh Numbers (Million) | Δz/h | Δy/h | Mean Cd | Mean Cl | RMS Cd | RMS Cl | St |
|---|---|---|---|---|---|---|---|---|
| Grid-1 | 2.78 | 0.0006 | 0.02 | −2.19 | 0.558 | 0.147 | 0.105 | 0.207 |
| Grid-2 | 4.47 | 0.0003 | 0.01 | −2.22 | 0.565 | 0.152 | 0.110 | 0.196 |
| Grid-3 | 6.36 | 0.0001 | 0.0075 | −2.20 | 0.561 | 0.150 | 0.106 | 0.191 |
| No Actuation | Case A | Case B | Case C | |
|---|---|---|---|---|
| Mean Cd | −2.22 | −2.21 | −2.21 | −2.23 |
| Mean Cl | 0.565 | 0.540 | 0.561 | 0.560 |
| RMS Cd | 0.152 | 0.128 | 0.137 | 0.137 |
| RMS Cl | 0.110 | 0.093 | 0.103 | 0.099 |
| St | 0.196 | 0.148 | 0.191 | 0.209 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Li, Z.; Sun, F.; Zhao, Z.; Wang, C.; Hu, J. Numerical Investigation of Multi-SDBD Plasma Actuators for Controlling Fluctuating Wind Load on Building Roofs. Appl. Sci. 2019, 9, 3493. https://doi.org/10.3390/app9173493
Zhang X, Li Z, Sun F, Zhao Z, Wang C, Hu J. Numerical Investigation of Multi-SDBD Plasma Actuators for Controlling Fluctuating Wind Load on Building Roofs. Applied Sciences. 2019; 9(17):3493. https://doi.org/10.3390/app9173493
Chicago/Turabian StyleZhang, Xuewen, Zhengnong Li, Fenglou Sun, Zhefei Zhao, Chequan Wang, and Jiaxing Hu. 2019. "Numerical Investigation of Multi-SDBD Plasma Actuators for Controlling Fluctuating Wind Load on Building Roofs" Applied Sciences 9, no. 17: 3493. https://doi.org/10.3390/app9173493
APA StyleZhang, X., Li, Z., Sun, F., Zhao, Z., Wang, C., & Hu, J. (2019). Numerical Investigation of Multi-SDBD Plasma Actuators for Controlling Fluctuating Wind Load on Building Roofs. Applied Sciences, 9(17), 3493. https://doi.org/10.3390/app9173493