2.1. Operation of the Hay Inclined Plane
To give the reader a complete idea of the analysis of the invention of William Reynolds, it is necessary to explain its operation. An exhaustive description of the mechanism is included in the article published on obtaining the 3D model [
13], so a more summarized description will be given here.
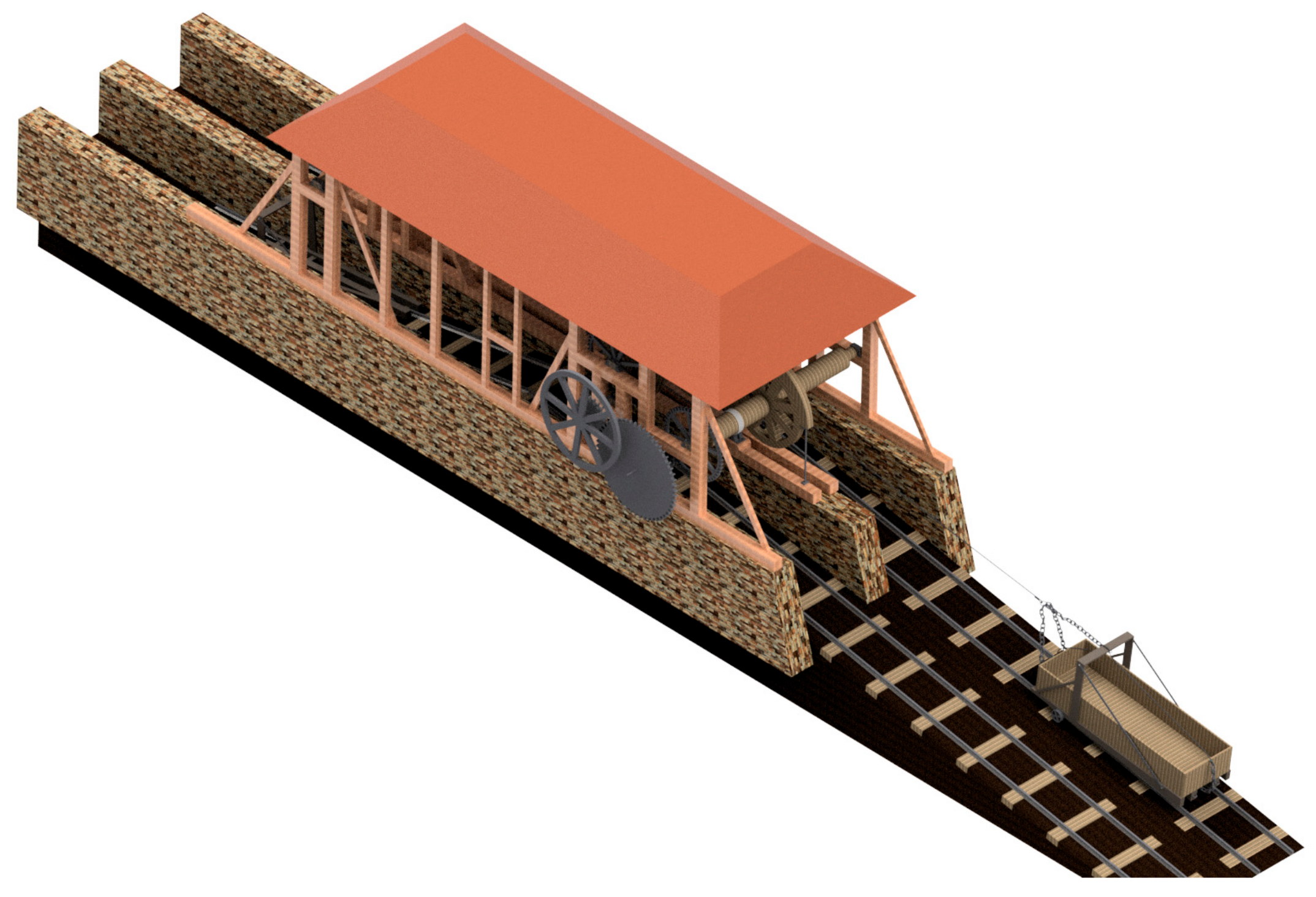
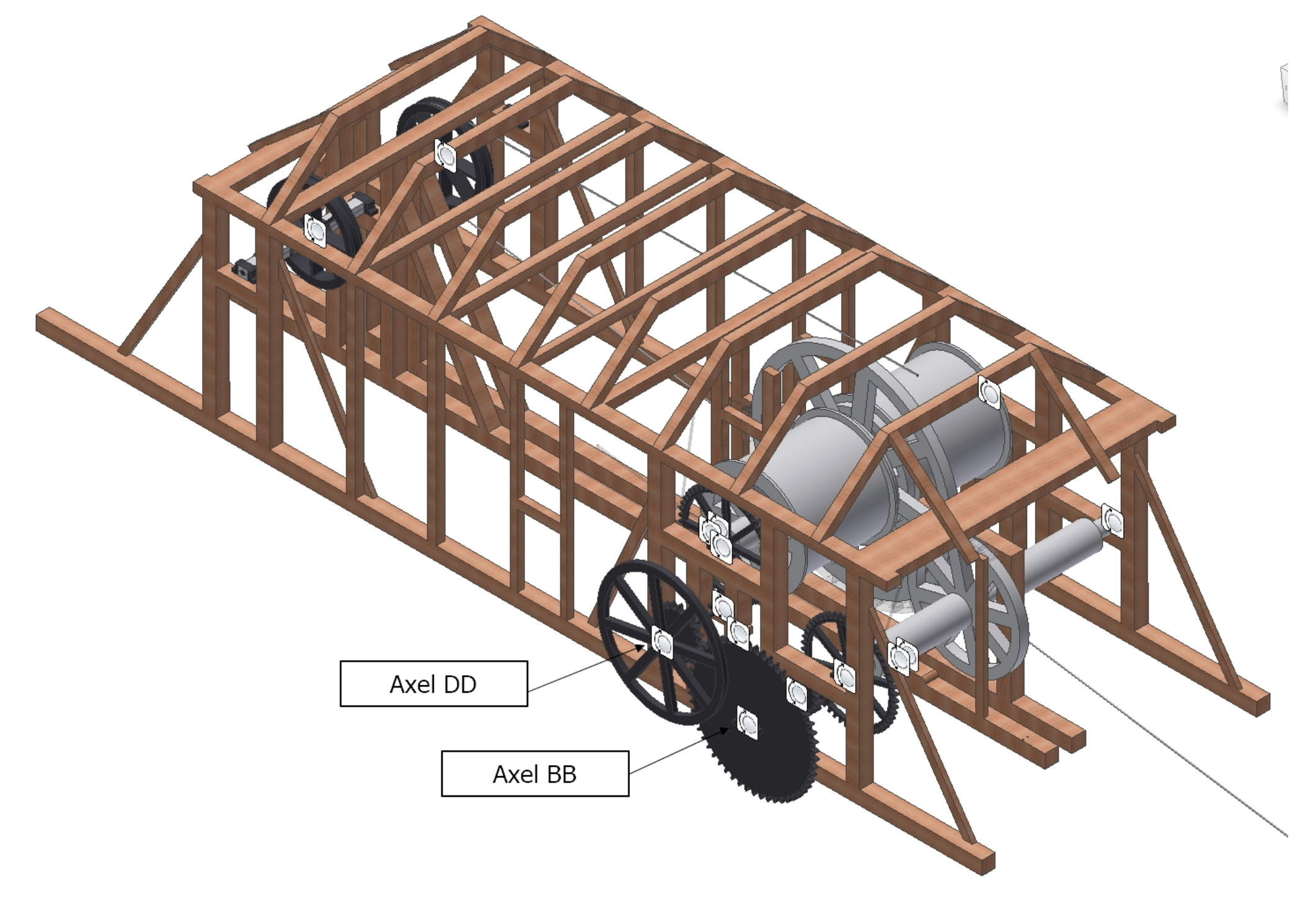
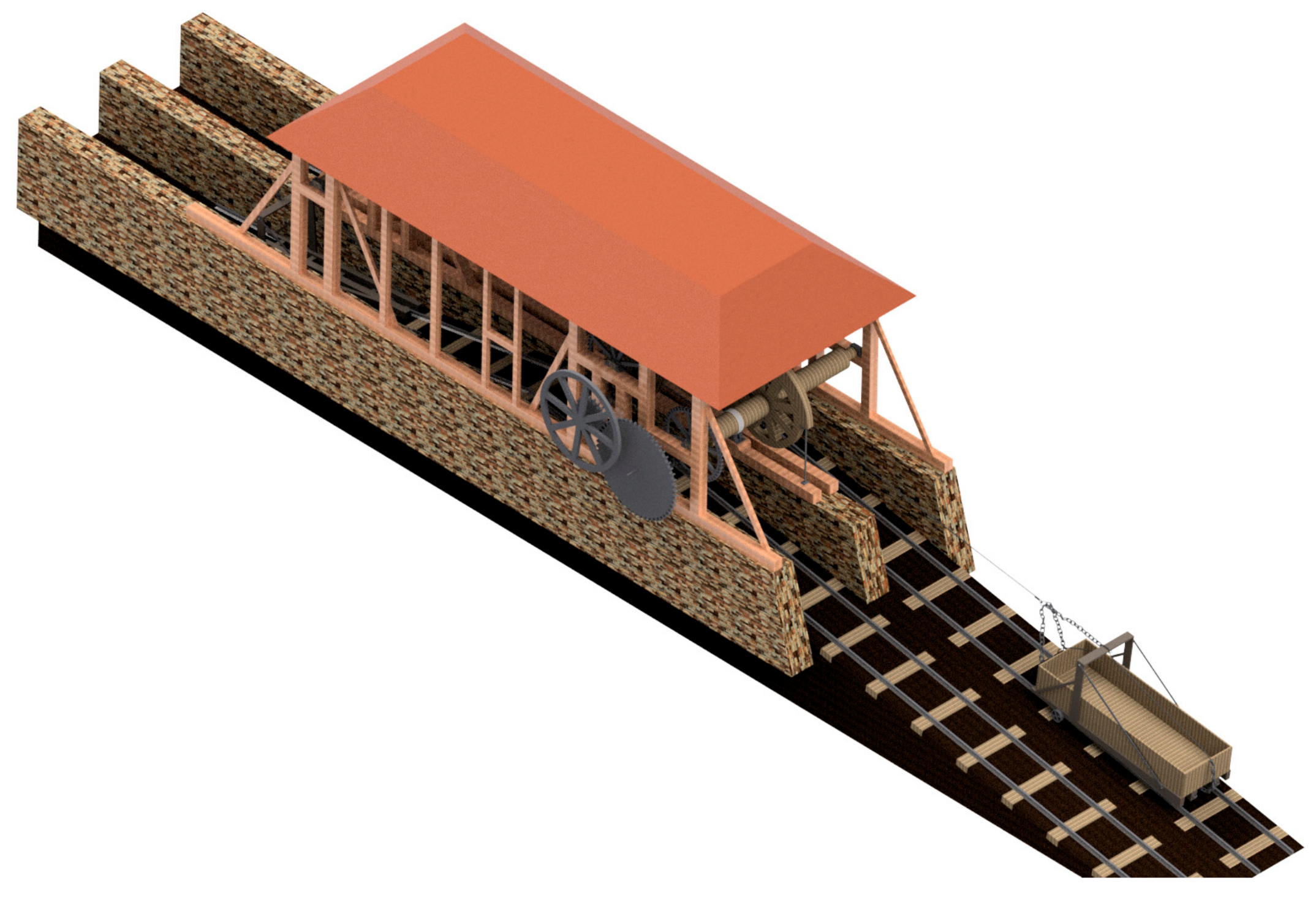
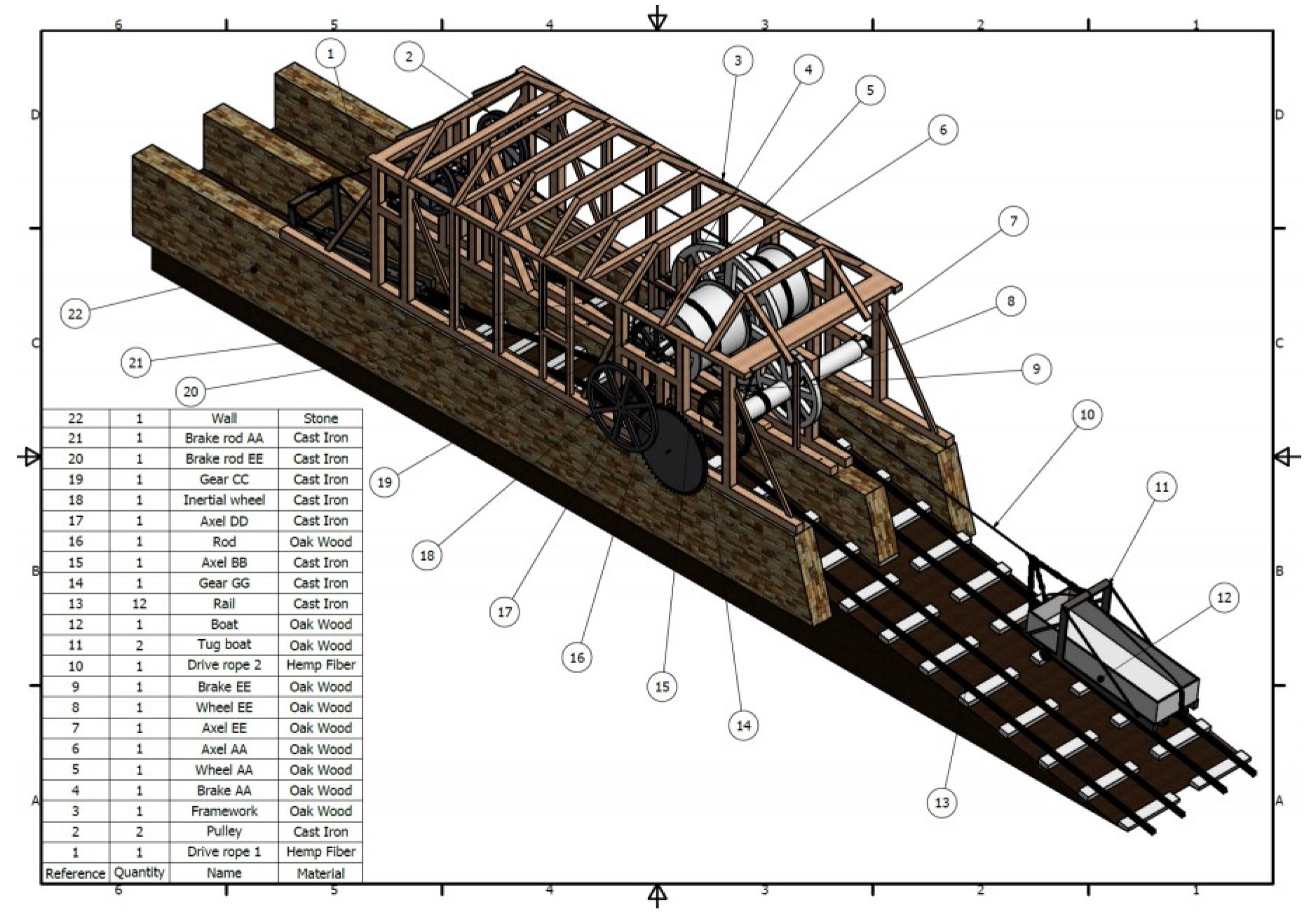
Figure 1 shows an isometric view of the mechanism after its computer-aided design (CAD) modeling, and
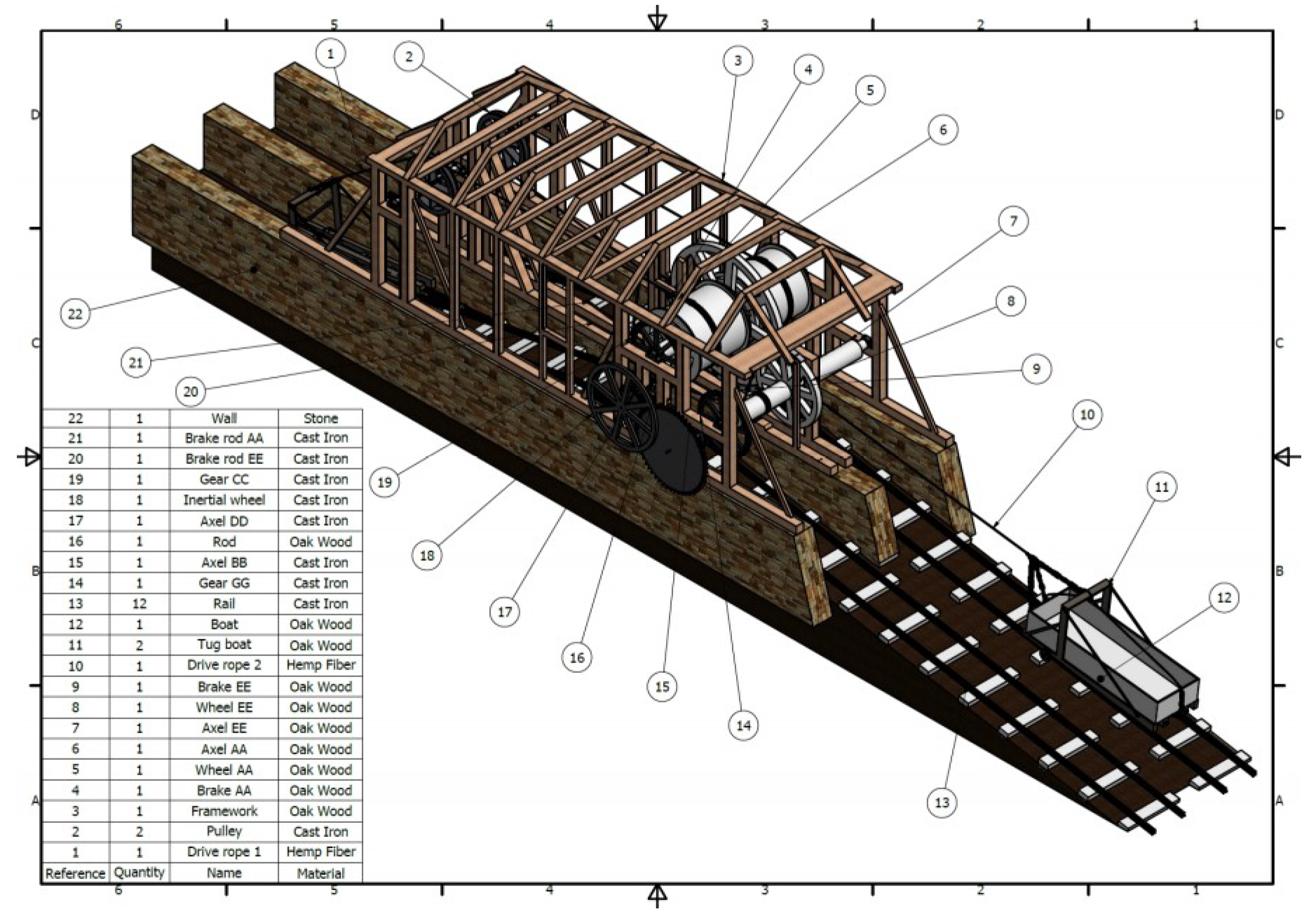
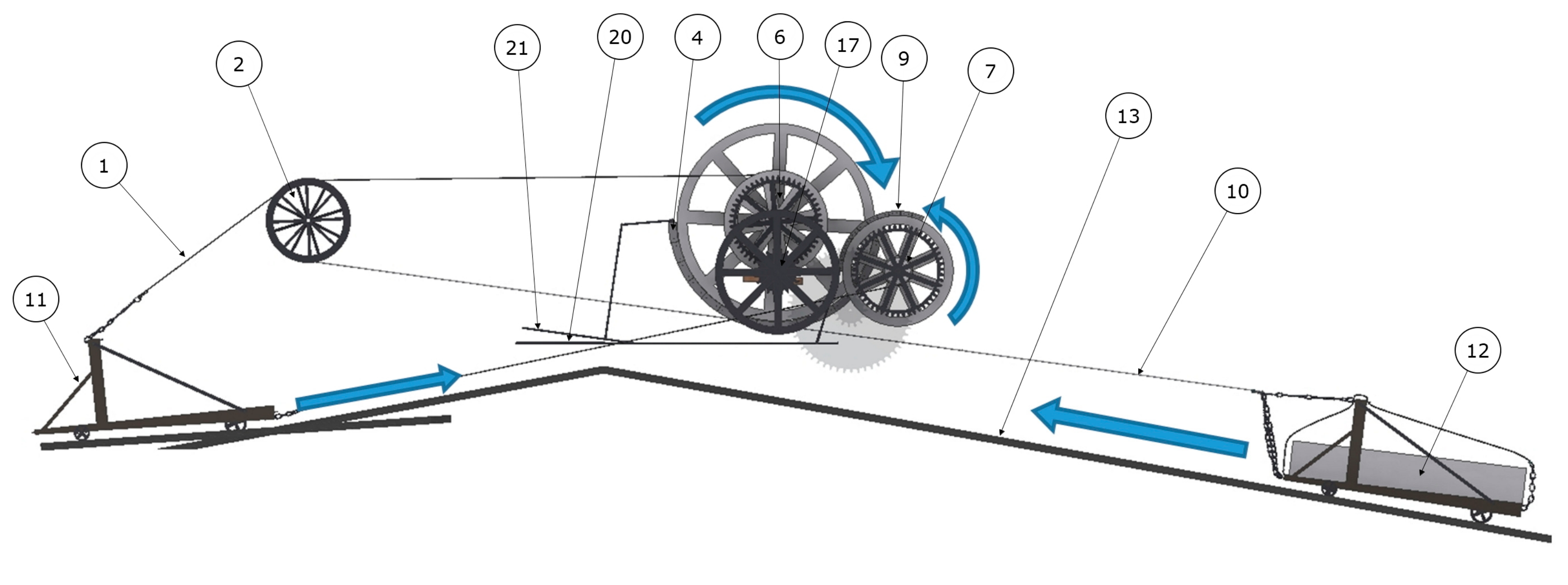
Figure 2 shows a plan of the ensemble with an indicative list of the different elements that form it.
Figure 2,
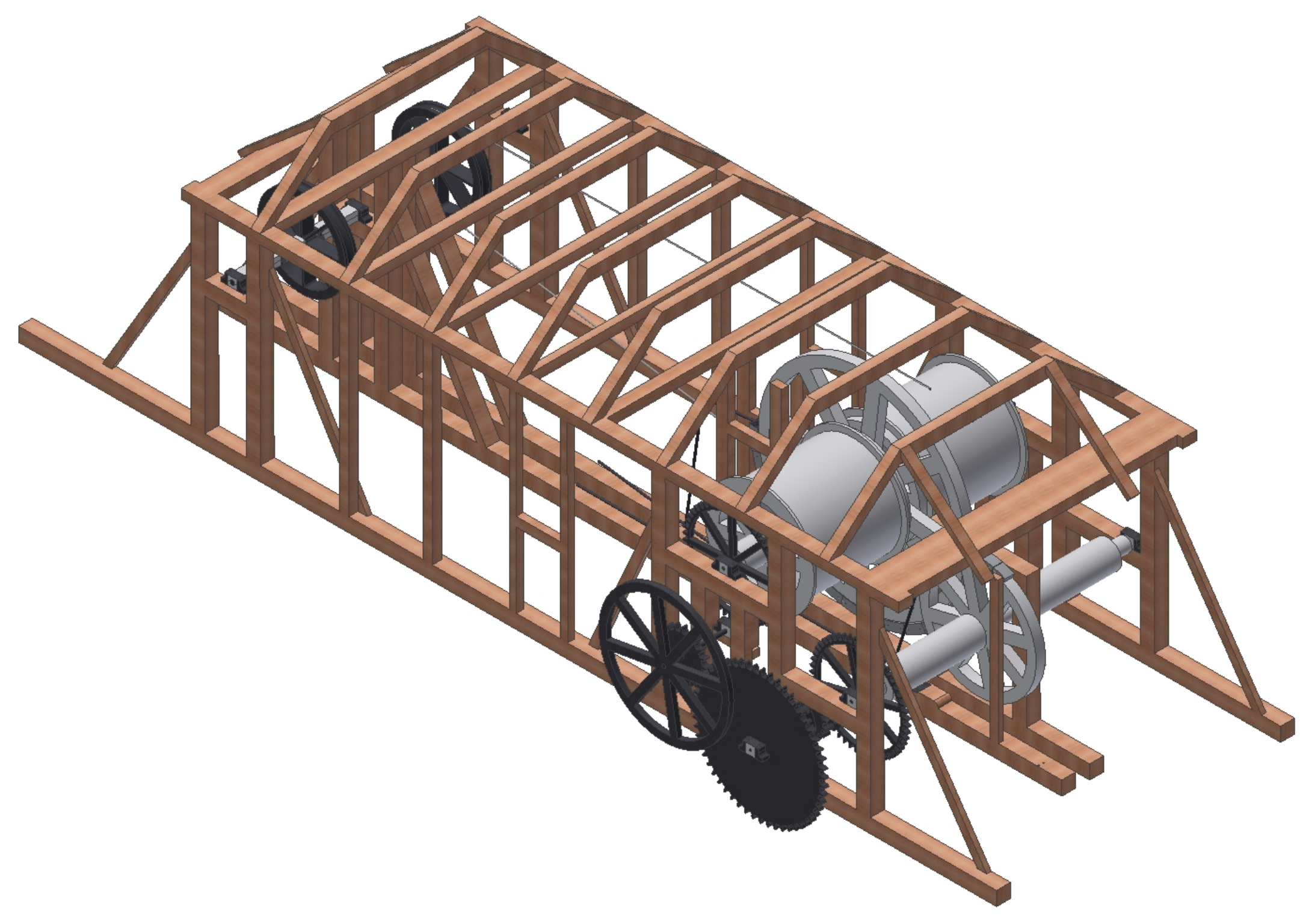
Figure 3 and
Figure 4 will serve to illustrate the operation of the mechanism.
2.1.1. Upward Movement
For the ascent of the boats (12), the tugboat (11) waited in the lower partially submerged part. The boat loaded with the material to be transported was placed on the tugboat, and they were tied together with a chain. After sending a signal to the operator of the upper station, a rope pulled the trailer, helping it to ascend on the rails (13).
The rope (10) that pulled the boat was picked up in the upper station on the AA axle drum (6) after going through some pulleys (2). As the axle rotated, the rope was coiled and the boat ascended. To move this axle, a steam engine was necessary, which moved a series of gears. An adjacent steam engine, of which only the chimney and the brick building where it was housed remain, operated an inertia flywheel (18). The wheel was solidly attached to the DD axle (17), which had two gears. The distal gear, which was the smaller gear, was coupled to the CC gear (19), which was the larger gear, which was solidly attached to axle AA, so that for each turn of the inertia flywheel the AA axle rotated 0.098 times in the opposite direction.
At the same time, the DD axle had a gear close to the inertia flywheel larger than the distal one. This gear meshed with an intermediate shaft, axle BB (15), which finally transmitted the movement to axle EE (7). For each turn that the inertia flywheel gave, the EE axle rotated, in the same direction, 0.14 times. A second rope pulling the tugboat that was in the upper channel was wound onto the EE axle drum.
To prevent the load from falling, or when it was necessary to move more slowly, two brakes could be used that braked the AA axle (4) or the EE axle (9) independently. For this, each axle had an inertia flywheel on which the brake was held, so that when pulling one of the braking levers (20) and (21), a collar embraced the wheels (8) and (5), respectively, and reduced the speed of the axles by friction.
2.1.2. Downward Movement
To descend the boats through the inclined plane, the process was similar. The path that had served to ascend the boat was automatically transformed into a descent route and vice versa. The engine had two hemispheres, where the ropes were wound onto the axles in the opposite direction, so while one of the axles was rolled, the other was unrolled with the same movement. When the rope was fully wound onto the drum, the end was taken on the other side of the drum, passed back through the pulley, and began to unroll.
The boat towed in the upper channel was pulled by the rope (1) attached to the EE axle to the upper station. In the upper station of the inclined plane, the rope was changed, and it was joined to the AA axle rope (10), which slowly began to unwind, allowing the plane to descend in a controlled manner. In cases of urgent necessity, both in the ascending and descending movement, the axle of the inertia flywheel DD (17) could be disconnected from the rest of the gears by actuating the shaft support bar (16).
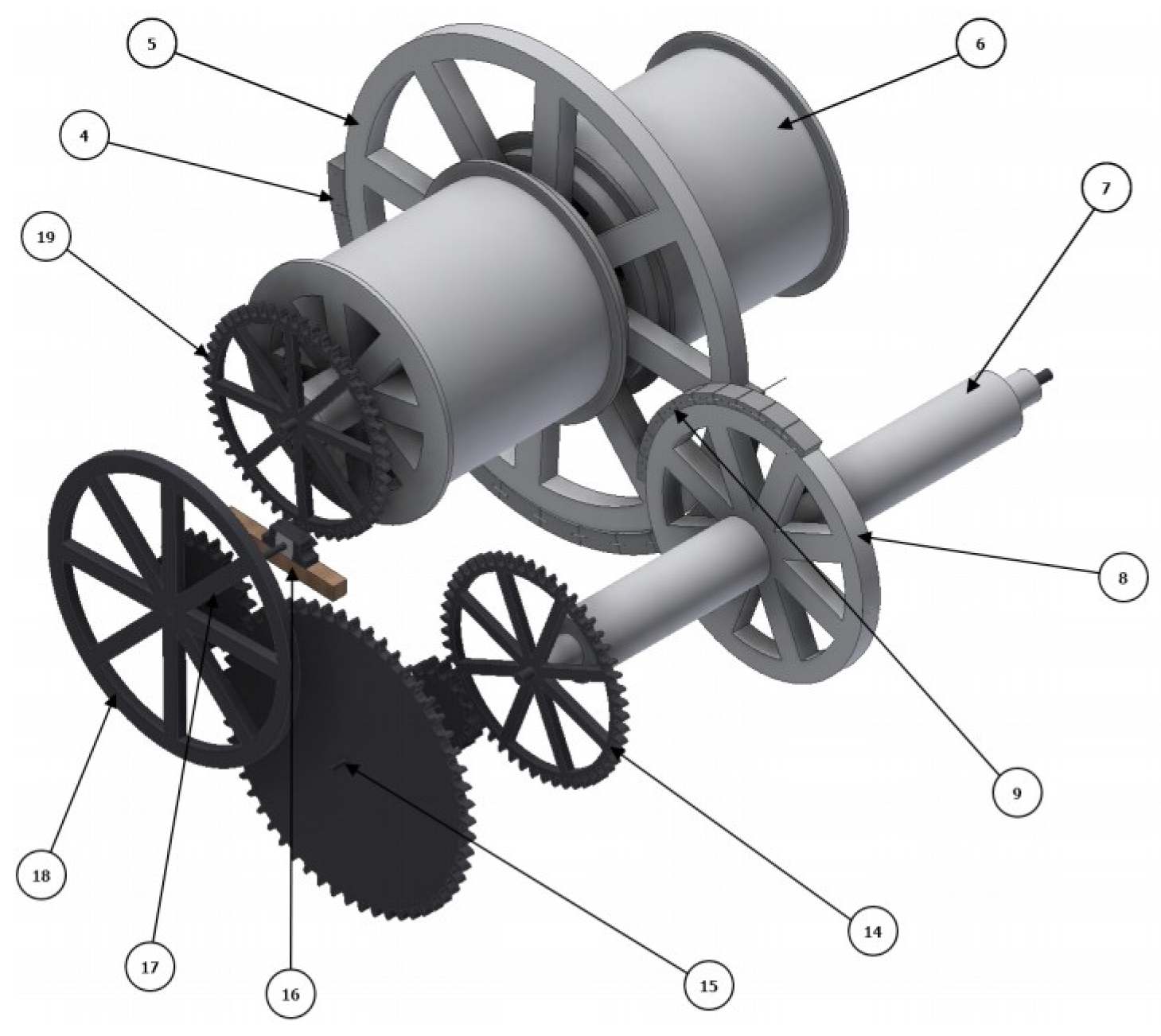
Figure 3 shows the detail of the axles and gears that facilitated the movement of the ropes. It is interesting to note that each of the axles has an inertia flywheel on which is placed a friction collar that functions as a brake. It is also possible to appreciate the moving bar of the DD axle support that serves to leave the entire set of transmissions motionless if necessary.
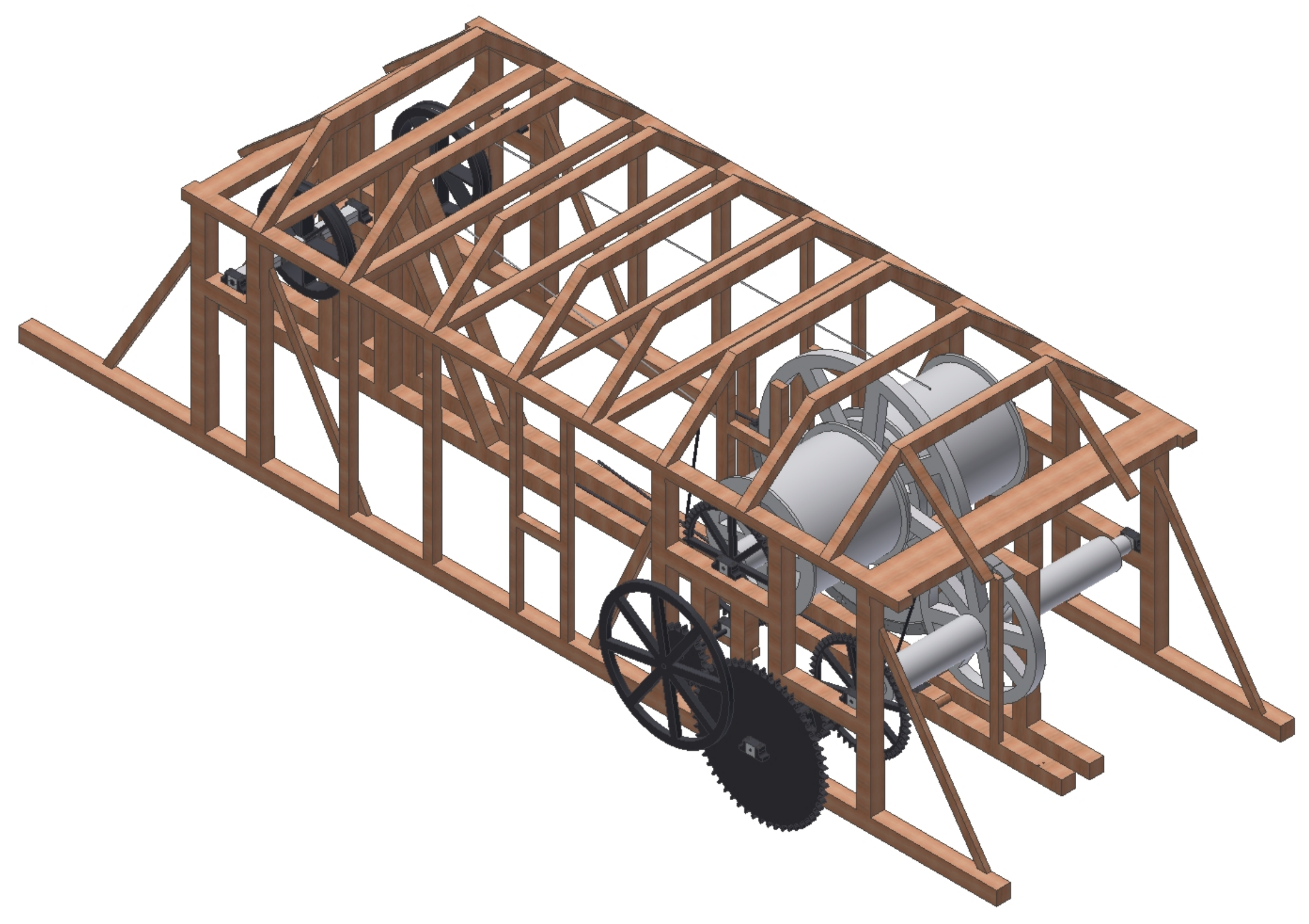
Figure 4 helps describe the movement of axles and tugboats when they are in upward motion. In the case indicated, the tugboat on the right is ascending to the upper channel and the one on the left, at that moment empty, is directed to the lower channel.
2.2. Computer-Aided Engineering (CAE)
Having defined and modeled the invention as designed by William Reynolds, it is now time to perform the static analysis with FEM, using Autodesk Inventor Professional software [
23]. FEM is a numerical method used to solve differential equations by converting them into a linear system of equations. The results obtained by this method are only approximate, since a specific number of solutions are obtained for some points called “nodes”, while in the rest of the points, the solution is interpolated, obtaining an approximate value. Likewise, the processes and parameters in a finite-element analysis (FEA) are independent of the software used.
This method pursues two objectives: the modal analysis that evaluates the natural frequency modes, including the movements of rigid bodies, and the static analysis of the invention, which evaluates its load conditions.
The numerical method used for static analysis generates a matrix with a large number of parameters, which can be categorized into three types: movement restrictions of the elements, the physical characteristics of the materials used, and the loads that affect it. On the other hand, the numerical model of the modal analysis is generated with fewer parameters, depending only on the restrictions and the physical characteristics of the elements, and therefore it is not conditioned by the parameters related to the loads.
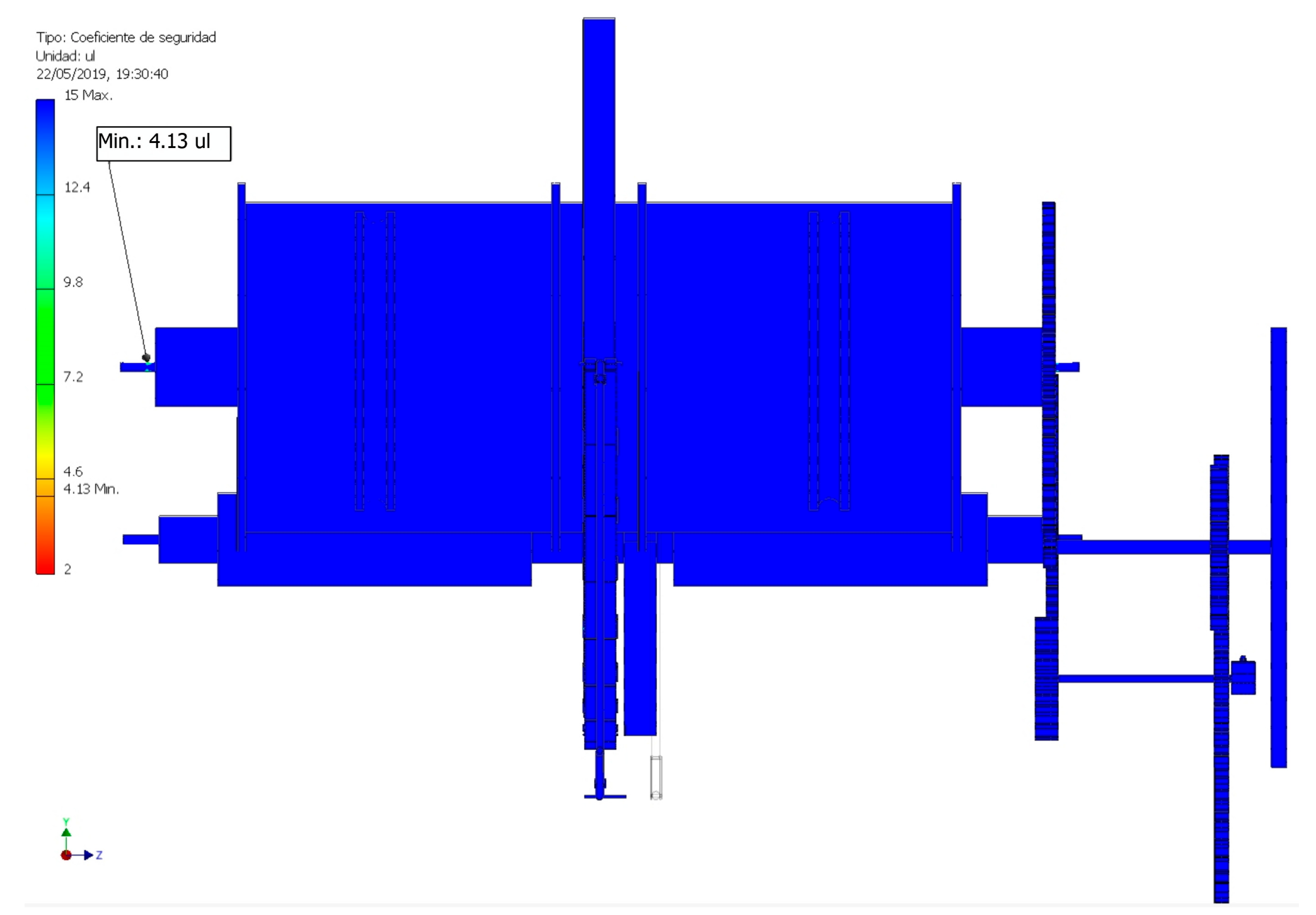
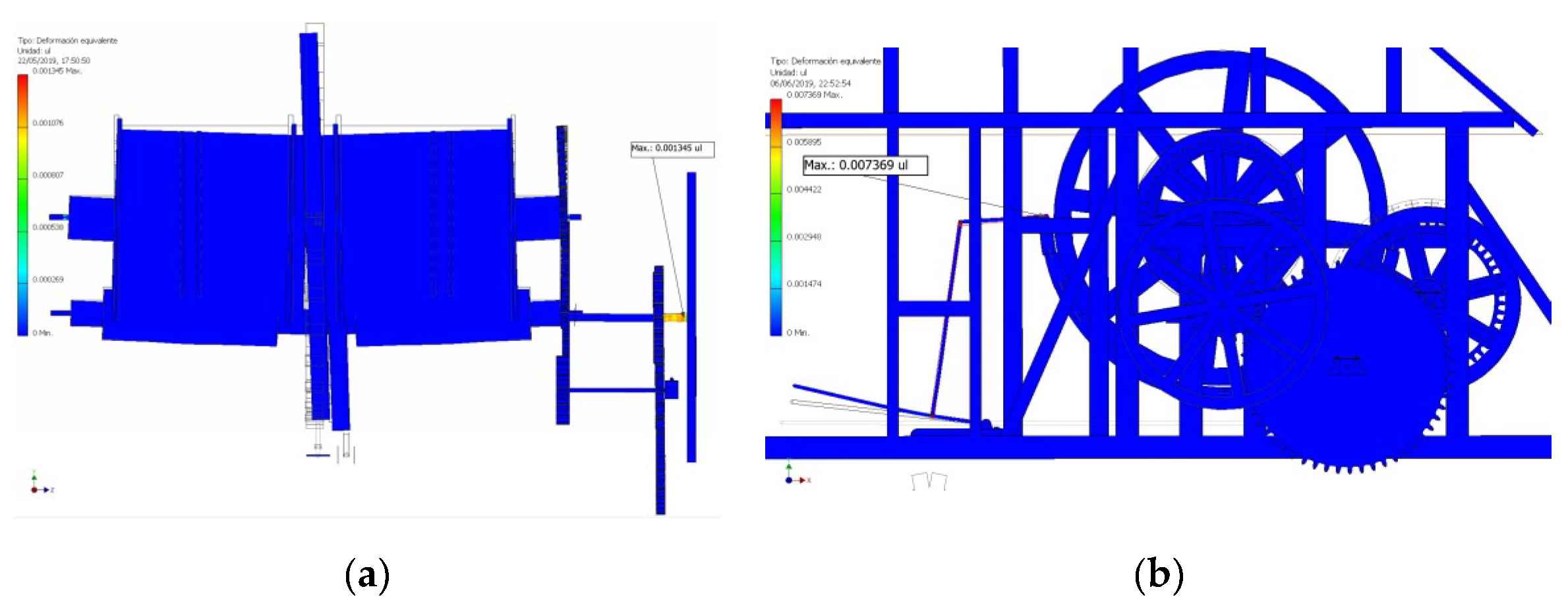
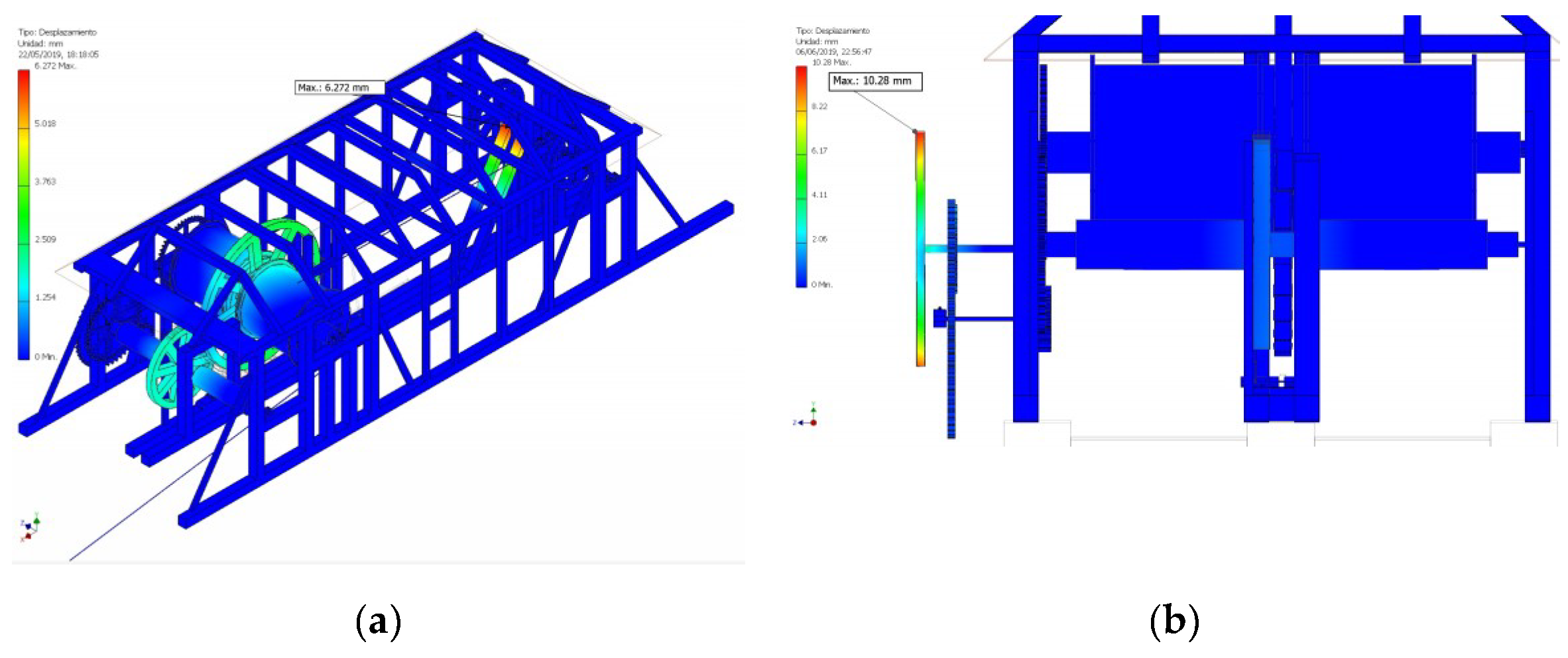
Based on these data, the static analysis will obtain results on the von Mises stresses, and the equivalent deformations and displacements of all the elements of the model, while the eight lowest natural frequencies in which the elements of the model enter into resonance will be determined in the modal analysis.
Then the set of parameters that determine the analysis will be the simplification and definition of the model (pre-processing), assignment of materials, definition of boundary conditions and study of loads.
On the other hand, the “nodes” are not determined randomly. To obtain a result that represents the whole mechanism, a network of nodes called a “mesh” is established, which must be adapted to the geometry of each element that takes a similar form. This process is called “discretization”, and each space delimited by the network is a “finite element”. These elements have different shapes (surfaces, volumes or bars). To complete the analysis, it will be necessary to define the shape of the mesh (geometry and size), since the number of nodes depends, to a large extent, on the accuracy of the FEM. The more nodes the model has, the higher will be the precision, but also the calculation matrix and, therefore, the calculation time needed by the processor.
2.2.1. Pre-Processing
The first step before proceeding with the simulation of the static analysis is the pre-processing. The invention for ascending and descending boats presents a high number of elements, meaning that excessive computational time would be required to perform the calculations required by FEM. As will be indicated below, the software used estimates more than one million elements that must be analyzed, which would require a great deal of time on a personal computer with standard features.
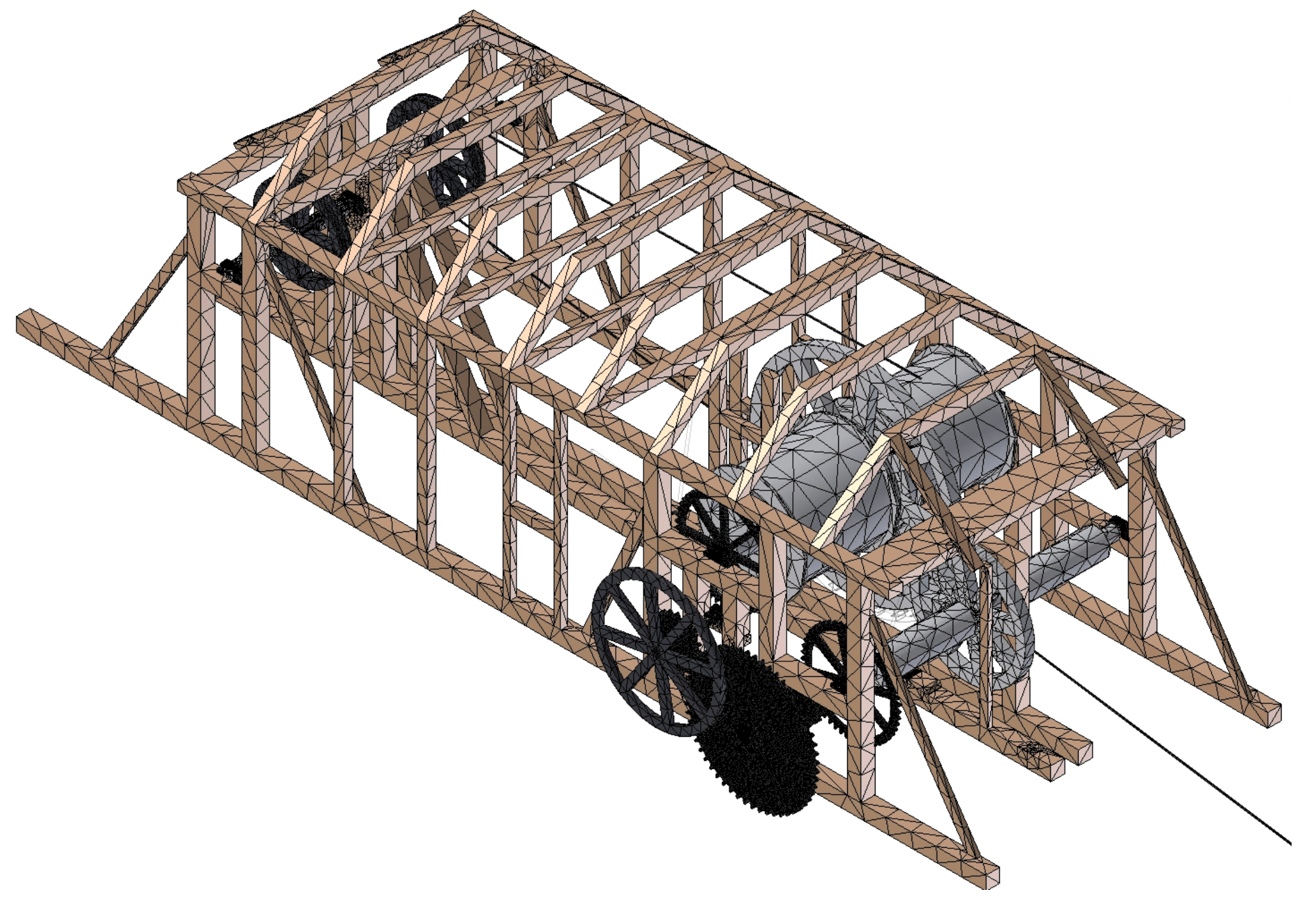
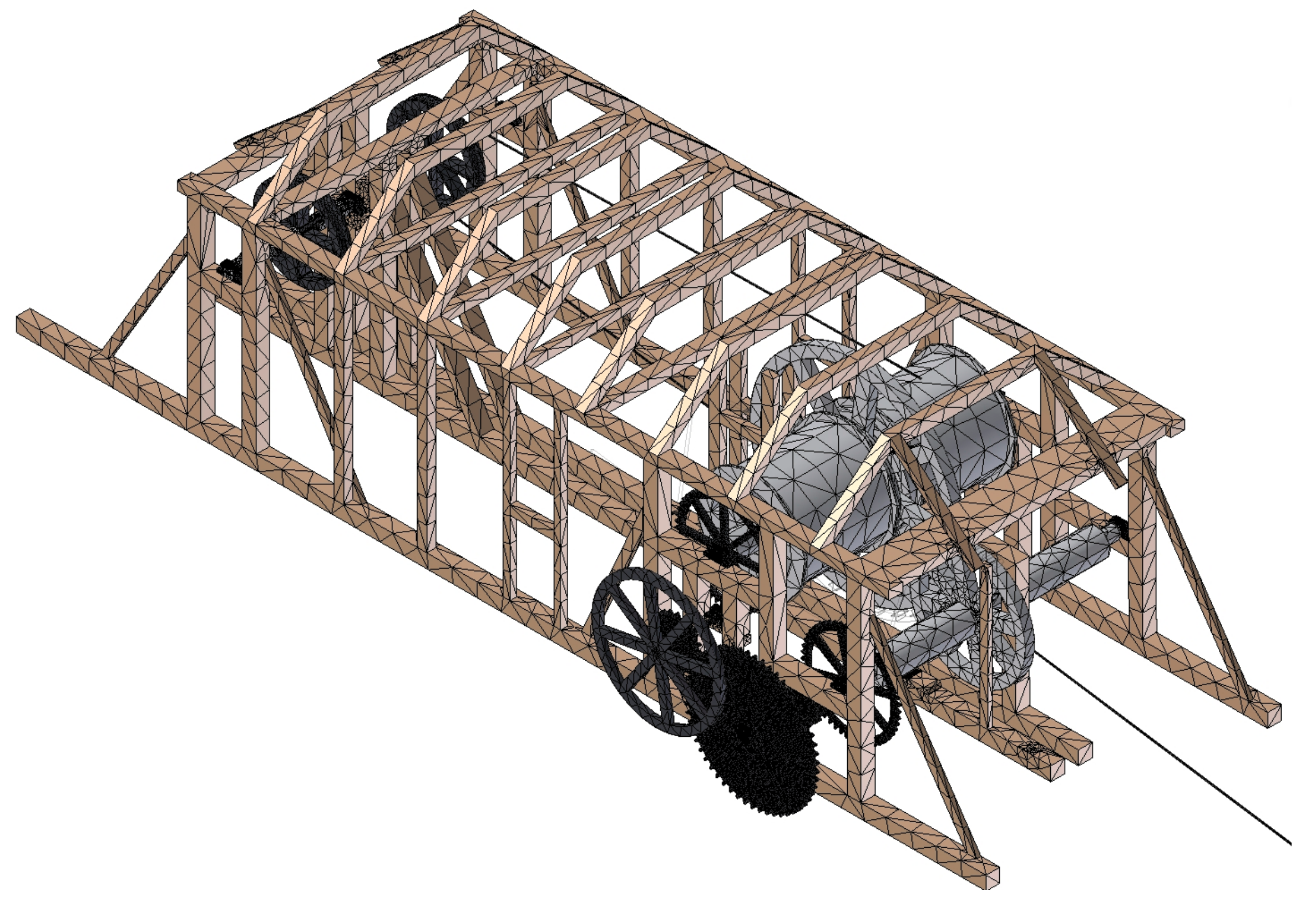
Therefore, a simplification of the model is necessary (
Figure 5) to facilitate the simulation. However, the simplification of the model should be performed with caution, as it should not interfere with the results of the static analysis. In addition, we must bear in mind that it is impossible to study the invention working in all possible circumstances, since these can all be very different. Taking these two premises into account, the static analysis of the inclined plane will be carried out in the two most unfavorable situations.
In the first place, the brick building, the rails and the plan have been dispensed with, focusing the study on seeing how both the engine and the support structure are affected. The roof, being a light structure exposed to the weather, has also been eliminated from the simulation, since it is not the support structure of the plane and it is not the object of the present study to analyze how it behaves in relation to the different types of external load (snow or wind).
Furthermore, it has also been decided to dispense with boats and tugboats. Each one of them presents a very high number of elements that would considerably multiply the calculations without affecting the results. Therefore, each of the tugboats has been replaced with a force that will later become the object of study.
The ropes that are associated with the two traction axles have also been dispensed with. The ropes of the time, made of hemp, are elements that had a special behavior. The software used is not prepared to correctly characterize its dynamic properties, which would force us to replace the tensions of the ropes with forces in the pulleys or by torques in the shafts.
Finally, it is necessary to examine the situations in which the engine is to be studied. On the one hand, the study of the invention was carried out with the boats fully loaded and ascending to the upper station. A priori, this case produces the maximum stress on all gears, pulleys and axles, so it is really convenient to study. However, the brakes, which are also important elements of the invention, would not come into play in this situation, so it was determined to study a second situation.
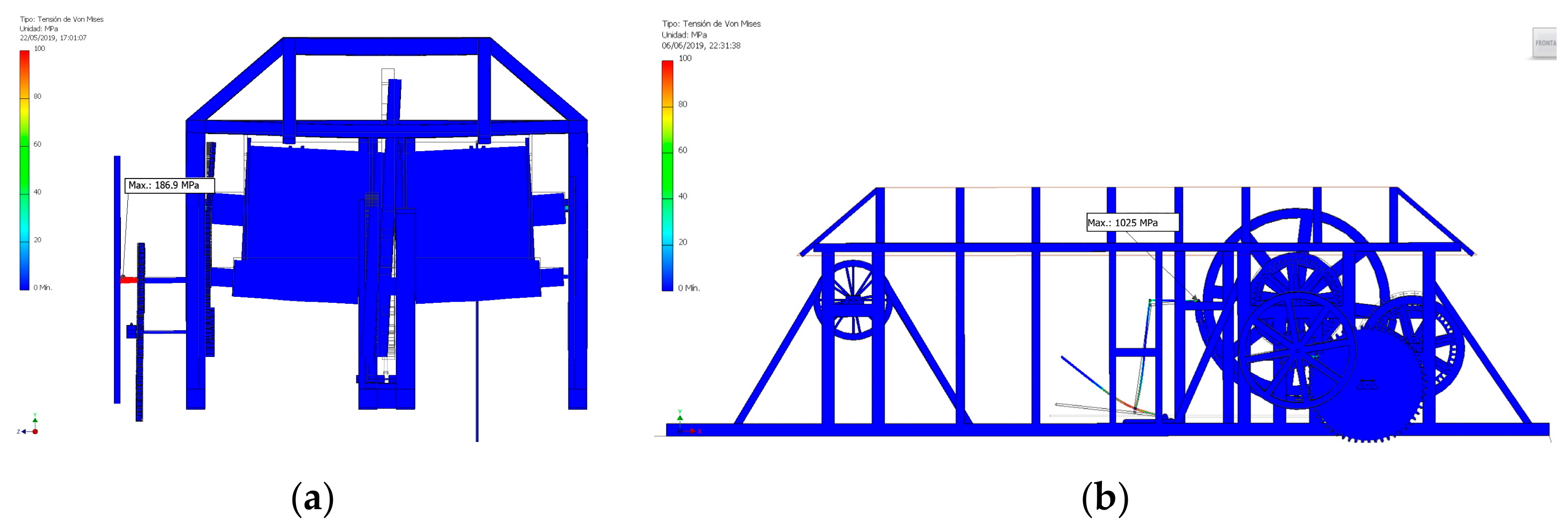
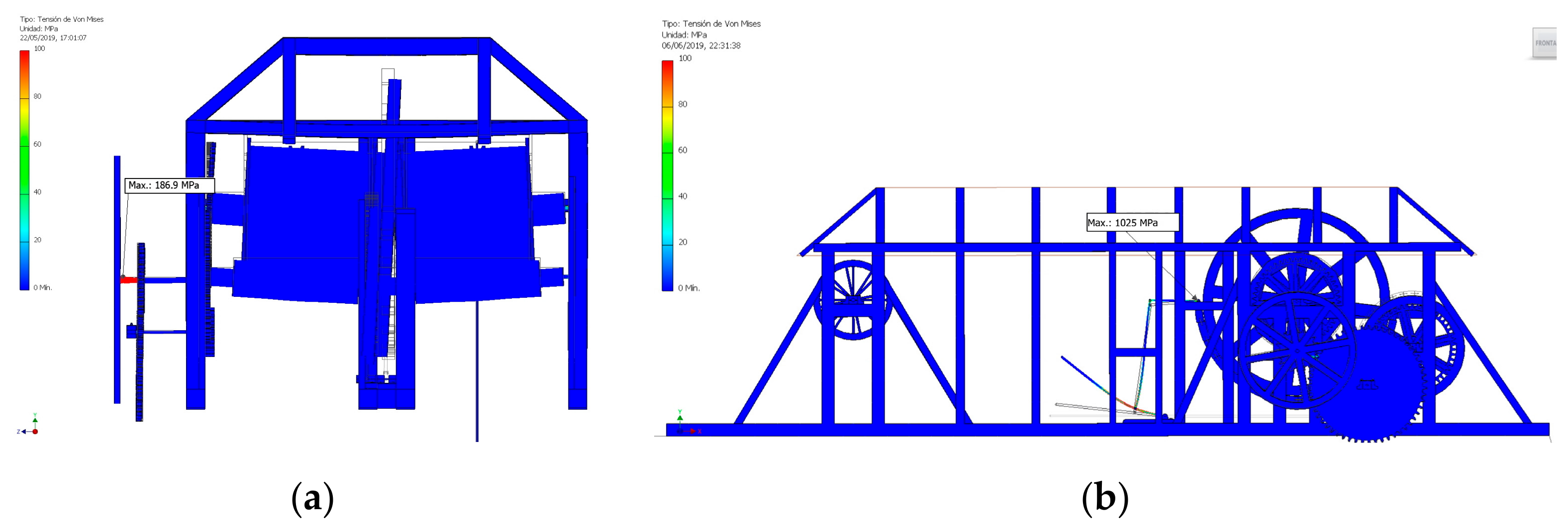
Therefore, a first situation would be to analyze the invention in the case of a blockage of the inertia flywheel, due to a disconnection with the steam engine, when the boat is fully loaded and descending. Another case, which would correspond to a second situation of emergency braking, would be the case of the tugboat with a loaded boat that had to be stopped using the brake that embraces the inertia flywheel of the AA axle.
2.2.2. Assignment of Materials
Having understood what aspects of the invention are to be studied, it is necessary to verify that all the elements of the assembly have their physical characteristics perfectly defined, without which the static analysis cannot be performed. However, the original materials of the engine are specified neither in the description of the invention nor in the written account, but it is not excessively complicated to determine with sufficient precision what they were. Thus, the metallic elements were deemed to be made of cast iron, probably forged in one of the ovens near the Hay inclined plane itself, the wooden elements would be of English oak, the rope hemp, and the constructed part of the installation of brick.
As mentioned in the previous section, neither the ropes nor the brick building form part of the static analysis, although the elements of the model have been perfectly defined. Certainly, the ropes are necessary in order to locate the direction of the tension they support on the axle, as will be discussed later, but they are excluded from the analysis for the reasons explained above.
Autodesk Inventor Professional has a very complete library of materials, where the physical properties (thermal, mechanical, elasticity and breakage) of each one are specified, although if necessary their properties can be defined or modified if the materials present some singularities.
In principle, the standard characteristics of the proposed materials have been respected. Thus, cast iron has the following values: Young’s modulus (120,500 MPa), Poisson’s ratio (0.30), density (7150 kg/m3), and elastic limit (758 MPa). In contrast, oak has the following values: Young’s modulus (9300 MPa), Poisson’s ratio (0.0001), density (760 kg/m3), and elastic limit (46.6 MPa).
Cast iron is an isotropic material, maintaining its physical properties in any direction, while oak is an orthotropic material, presenting a main working direction (direction of the grain), and different characteristics in the other directions. This main direction is the one that has been taken into account in the design of the support structure so that the beams and columns are modeled by choosing as the direction of the grain that in which the element has greater dimensions.
2.2.3. Boundary Conditions
The next step before starting the simulation of static analysis is to define the boundary conditions of the assembly elements. For this, the types of supports that exist in the structure are defined, as well as the manual contacts between certain parts.
Traditionally, the types of supports have been classified as embedded, articulated, mobile or rotating, but Autodesk Inventor Professional classifies them based on the degrees of freedom they possess. Thus, it defines fixed constraints on the surfaces of the elements that have no freedom of movement, sliding constraints on those for which one direction is impeded, and rotating constraints on the surfaces of the element that can only rotate around a certain axis.
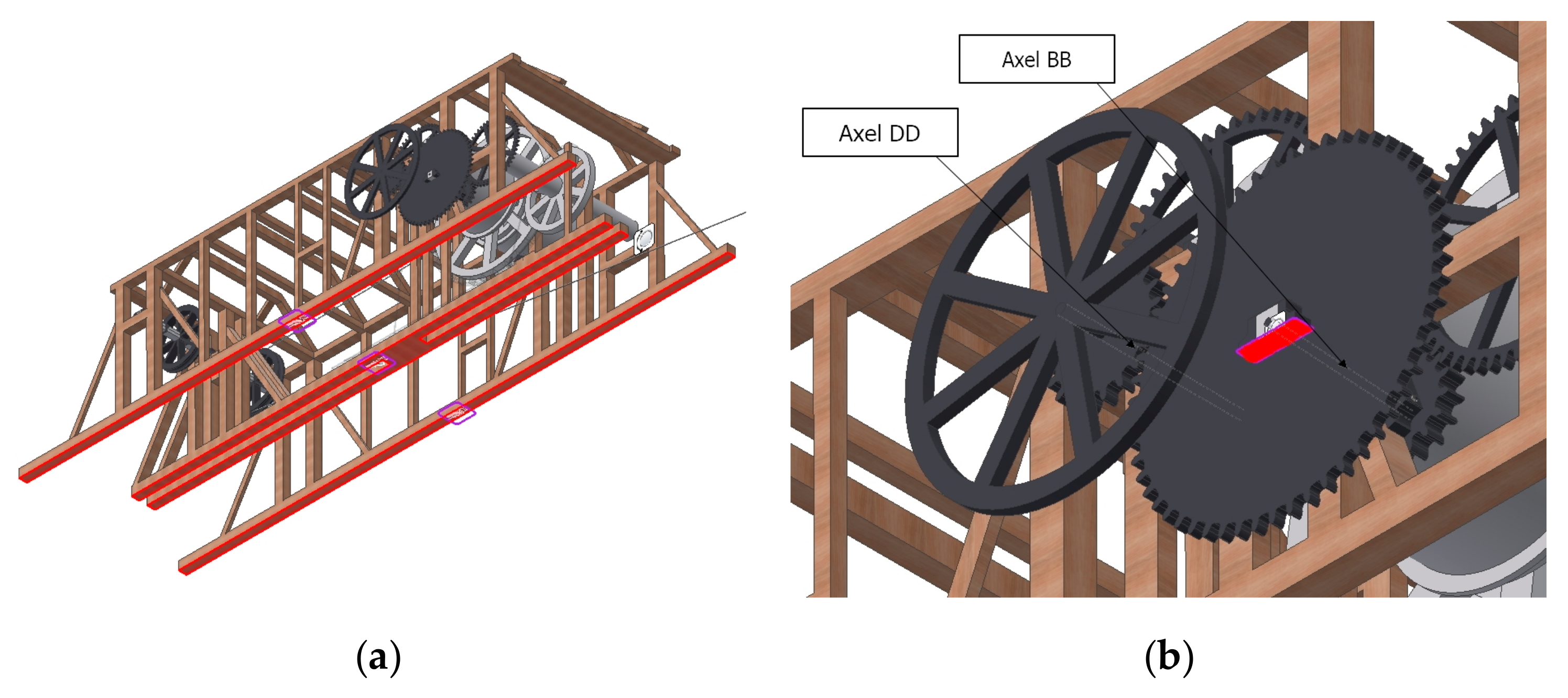
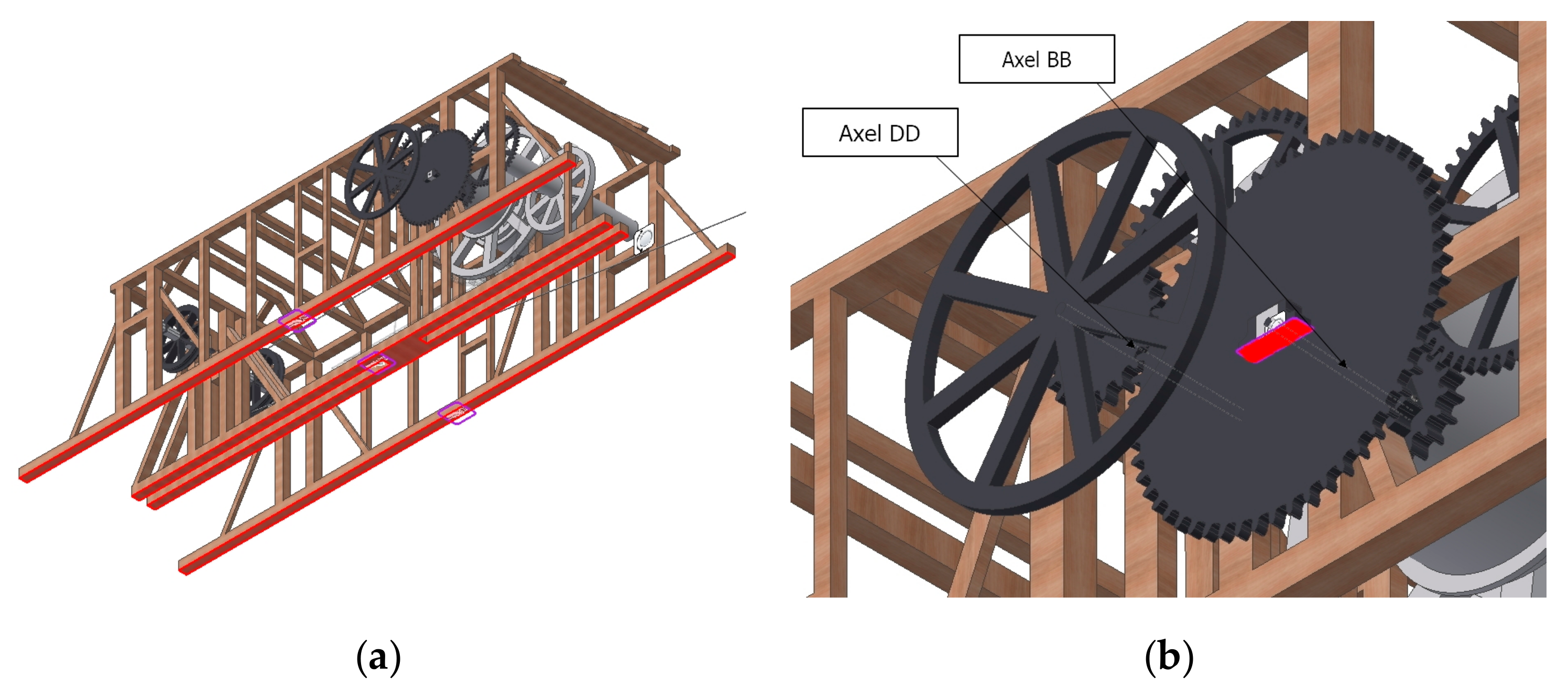
In the model of the
Hay inclined plane, it has only been necessary to define two types of constraints for the different surfaces: fixed and rotary. The fixed constraints are those that are applied mainly to the surfaces that are perfectly fixed to the brick building, such as the lower part of the wooden support (
Figure 6a) and the support of the intermediary axle BB (
Figure 6b).
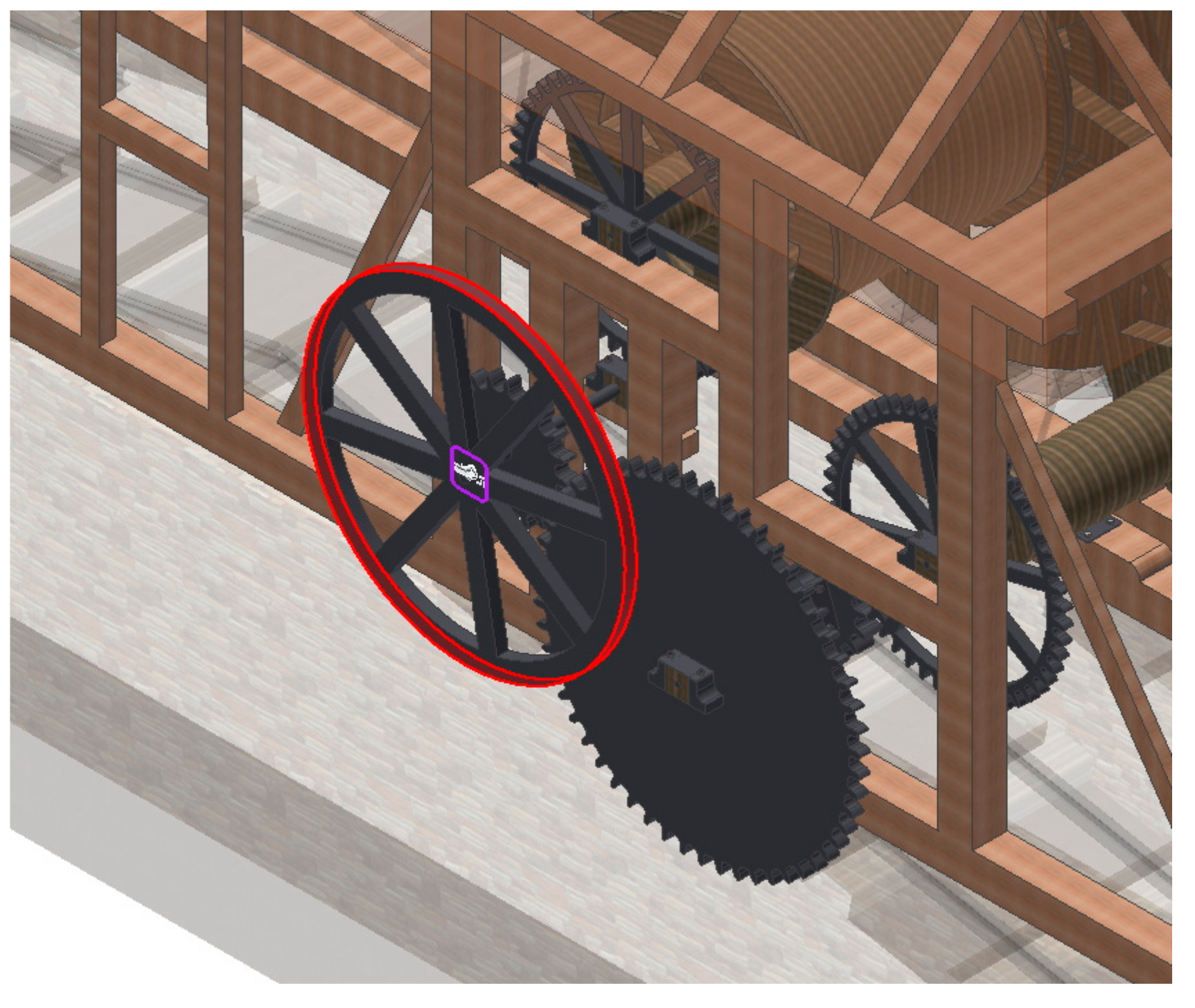
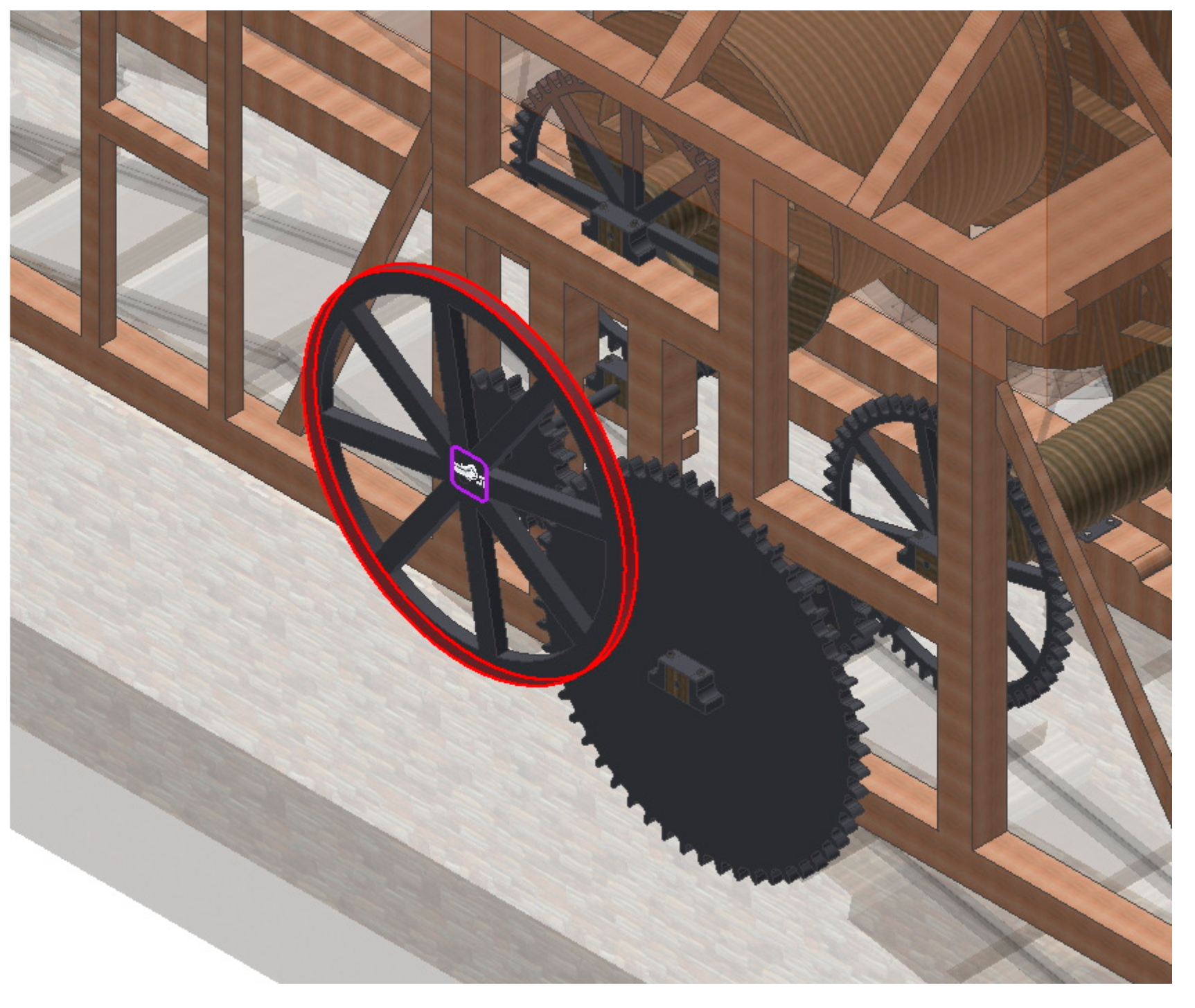
On the other hand, the rotary constraints are applied to the surfaces that rotate freely, being fundamentally the points of contact between the axles and the supports on the structure. The transmission shafts have two supports, except for the DD axle, which has the inertia flywheel. This DD axle has only one point of support, because the inertia flywheel would be linked to the inertia flywheel of the steam engine that drives it through a belt or its own support structure. For this reason, the simulation will be carried out as if the surface of the inertia flywheel also served as a rotary support. The other elements that also have surfaces that rotate freely are the contact between the pulleys and the axle on which they roll, as well as the contacts between the first parts of each brake and the axle that supports it (
Figure 7).
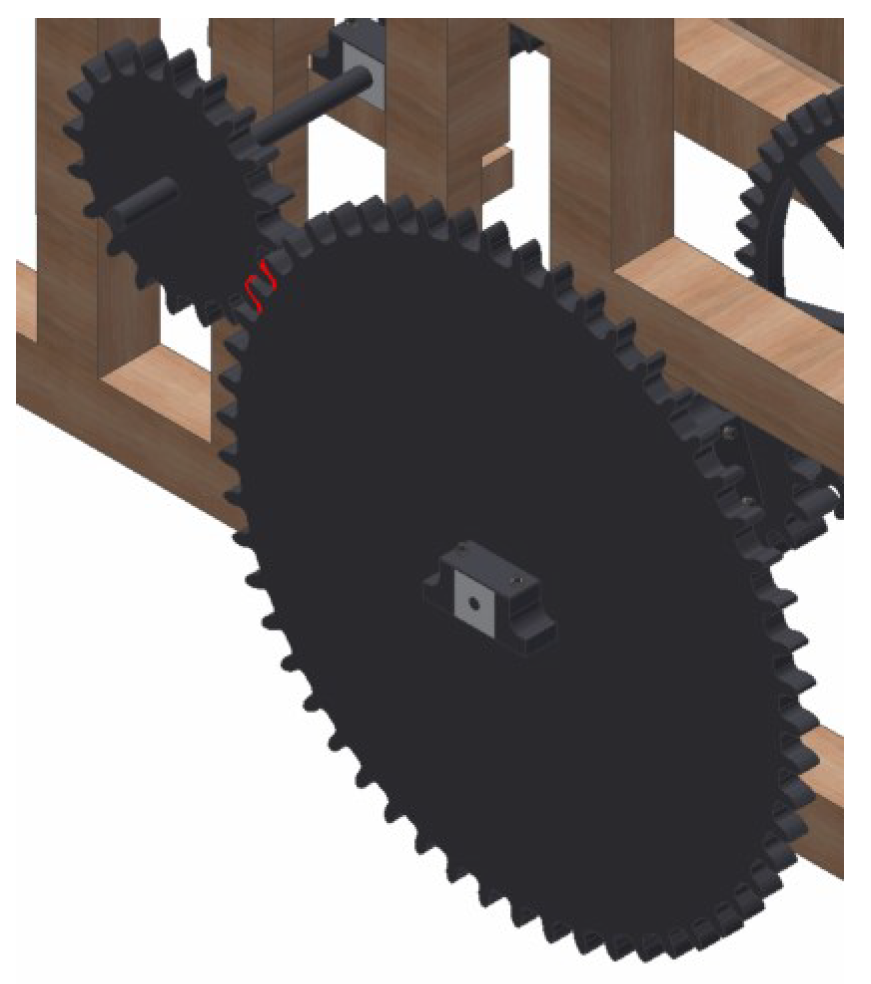
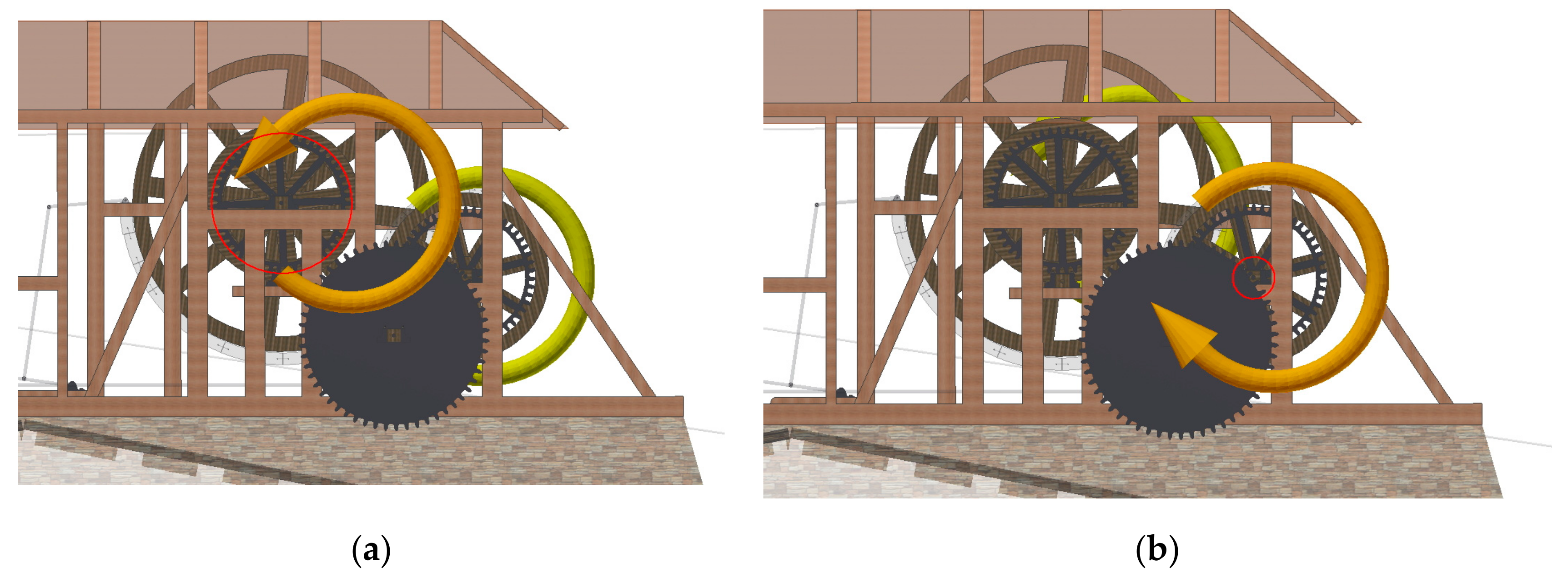
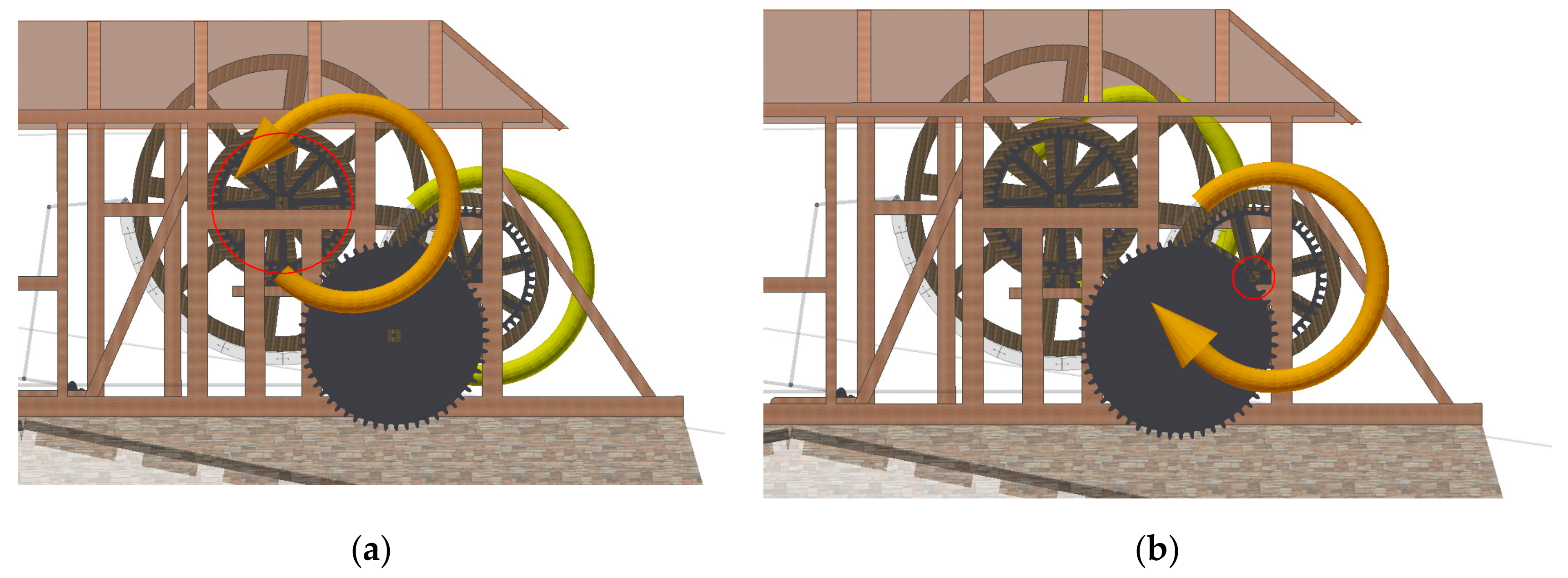
Regarding the manual contacts, it is especially important to check that the contact between the teeth of the different gears is correctly defined. Normally, when designing and positioning the gears, the edges of the gears do not come into contact, and therefore, the static analysis can be affected. Similarly, when studying the braking position, the contact between each of the brake parts and the inertia flywheel of the axle must also be correctly defined. Thus, in all cases, the defined manual contacts are of the blocked type (
Figure 8), and the rest of the contacts between elements are recognized automatically by the software.
2.2.4. Forces Applied
The definition of the forces that affect the inclined plane is perhaps the most delicate step in the preparation of the simulation, since the various parts that compose it are affected differently by different forces.
Previously, the two situations in which the mechanism will be simulated were presented: a blockage situation of the inertia flywheel, and an emergency braking situation. Both present common forces, but also different forces that will be studied in these situations.
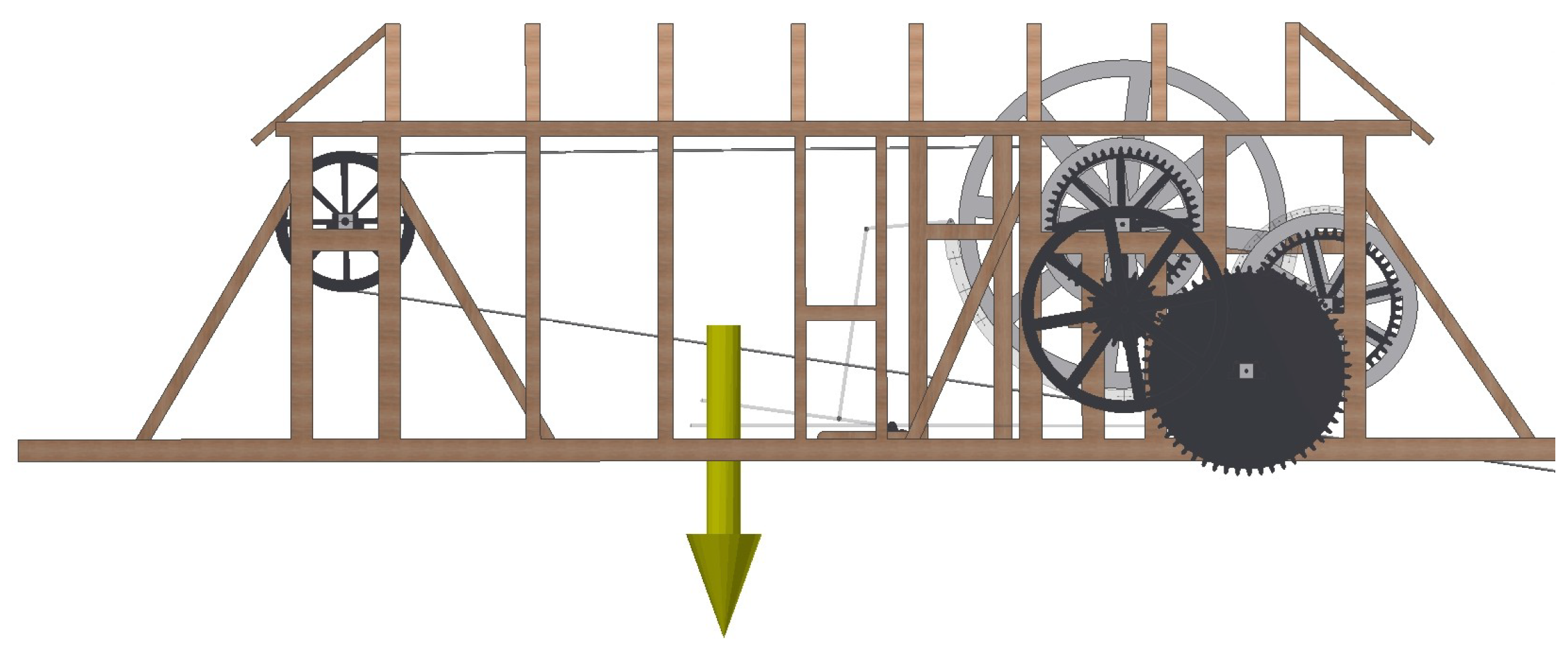
Among the forces common to both situations are the force of gravity and the tensions applied to the pulley in the direction of the rope.
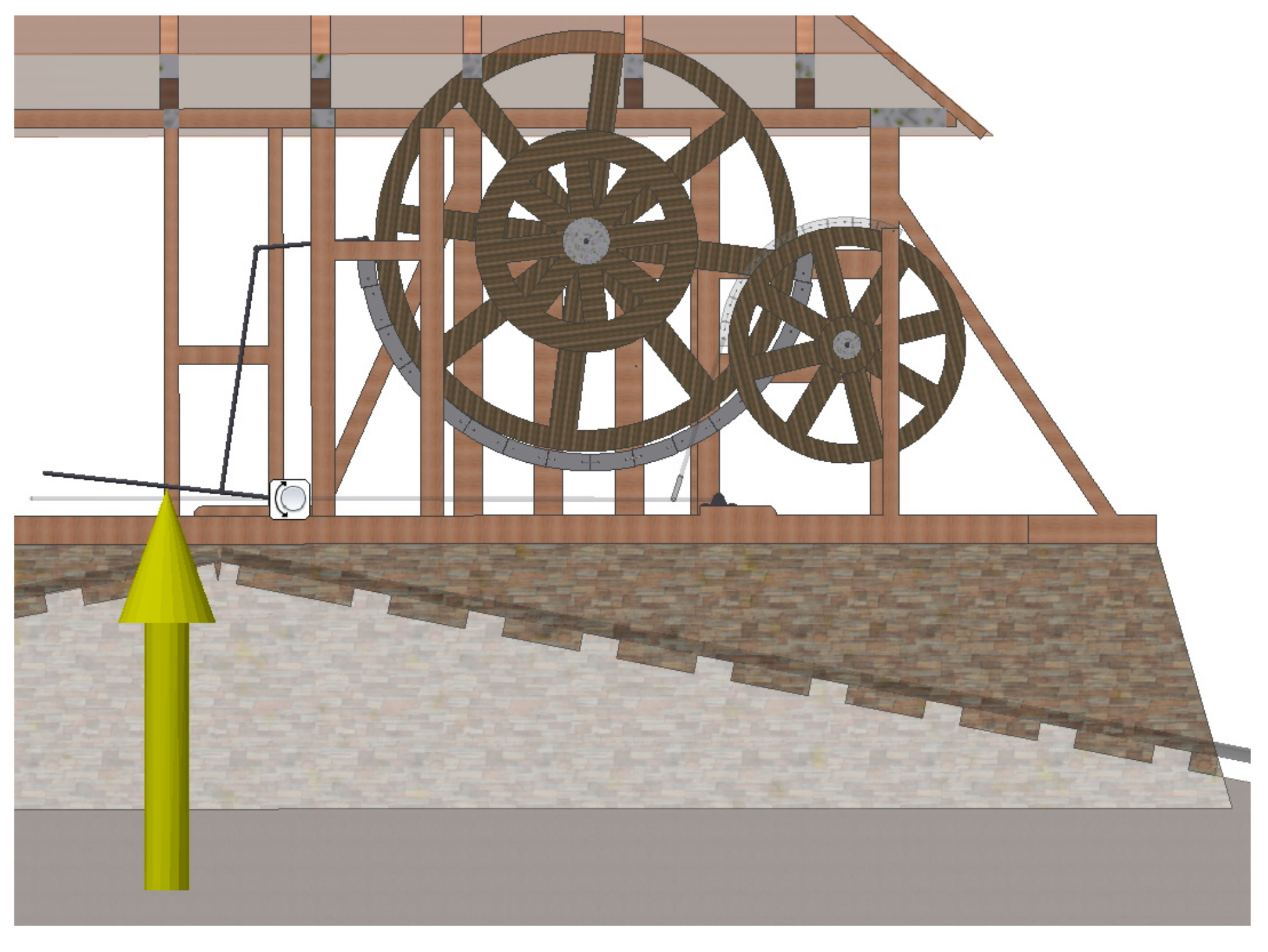
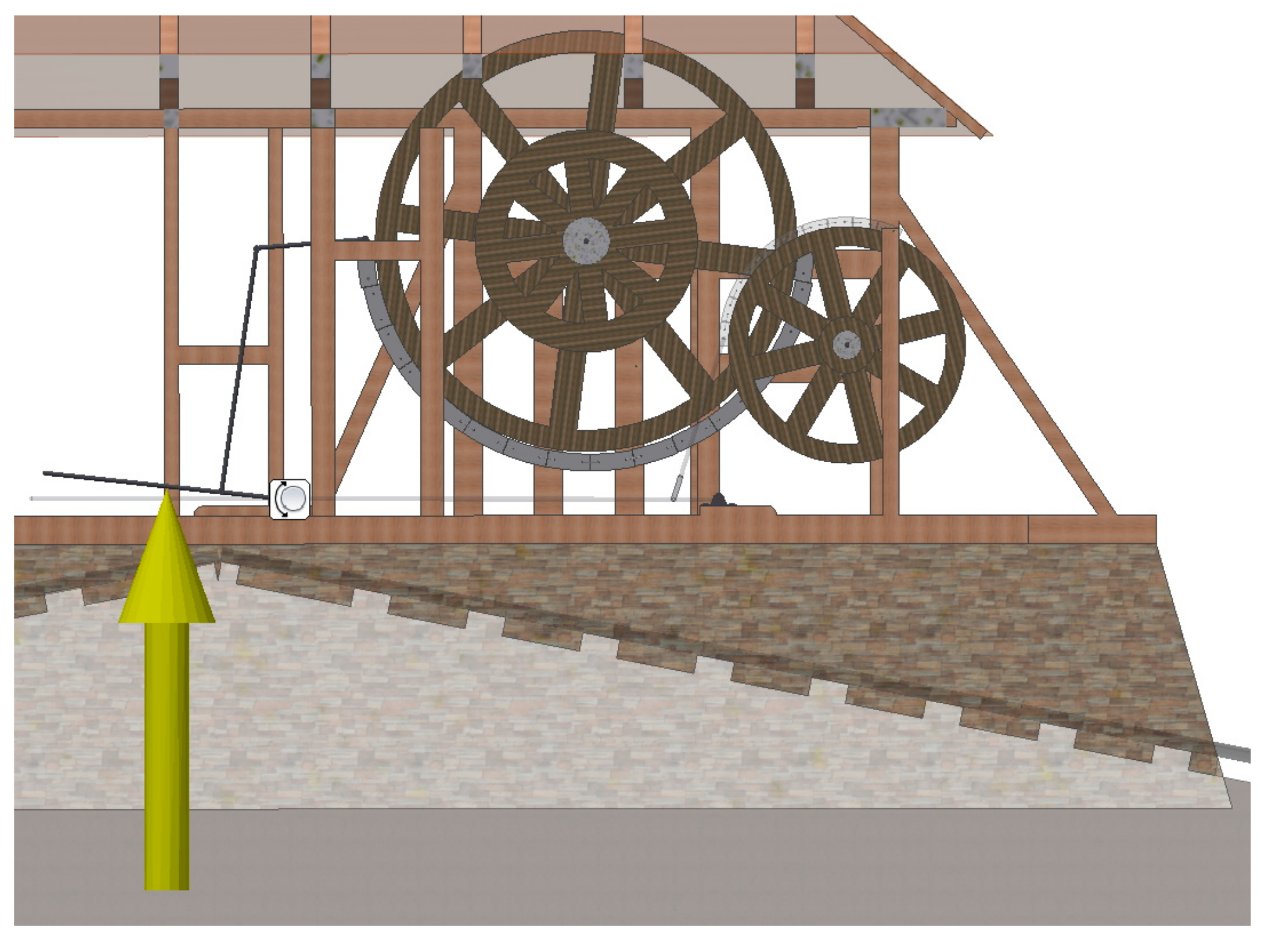
Regarding gravity, the software defines it by specifying the magnitude and direction, and for it to be applied at the center of gravity of the engine, it is first delocalized by defining a generic vector of 9810 mm/s
2 in the direction of the Z axis in the negative direction (
Figure 9).
On the other hand, there is a tension applied to the pulley through the rope, and this is due to the weight of the tugboat along with the boat. The rope embraces the pulley on the outside, and therefore, it would not be necessary to characterize this tension if the behavior of the rope was simulated. However, as explained above, the dynamic behavior of the rope prevents it from being included in the simulation, raising two questions: on the one hand, how can the tension of the rope be simulated on the outer area of the pulley?, and on the other, could the load be replaced with a torque on the pulley shaft? The answer to the first question is affirmative, but not for the second.
To be able to apply the tension on the pulley in the most realistic way, a piece of rope was taken and joined together with the pulley. On the first contact point of the pulley with the lower and upper rope, two working planes were defined in a manner transverse to the main direction of the rope. On these planes, a load equivalent to the previously calculated tension was applied (
Figure 10). In addition, for each of the tensions to have the proper direction, a larger piece of rope was used, although once the loads had been defined, it was excluded from the simulation.
The two tensions have the same value, because, as will be explained later, the AA axle exerts a moment of inertia that cancels out the load of the tugboat, so the situation is static. Due to this, the value of the tension is equal to the weight of the tugboat with the boat.
According to the data provided by Betancourt, the inclined plane is 210 feet high on a plane of 880 feet in length, which translates to an angle of inclination (α) of 13.806°. Furthermore, it is considered that the mass of the boat, using the materials of the time, is M
1 = 2951.453 kg (including the trailer and the chains that rig it), and in addition it is assumed that the boat is fully loaded with a mass M
2 = 5000 kg. Therefore, the value of the tension on the rope will be:
Forces at Play in the Situation of Inertia Flywheel Blockage
The calculation of the torques that cause the shafts to overcome the tension of the rope and thus to be able to raise the load on the plane is decisive. In addition, the torques of the AA and EE shafts do not have the same magnitude, since the slopes of the planes are different, although they are loaded equally. Because of this, they will be calculated independently.
The torque on the AA axle (
Figure 11a) has to do with the previously calculated tension. Its calculation is very simple, since the value of the radius of the shaft drum is known, r = 1.185 m.
On the other hand, the torque along the EE axle (
Figure 11b) has to do with the tension supported by the tugboat rope that ascends from the upper channel. It can be assumed, in the worst case of tension, that the tugboat is also fully loaded and, therefore, that the mass is similar to the aforementioned M
1 + M
2. However, the inclination of this plane is lower than the previous one, with a value of α = 10.470°. With these data, the tension of the EE axle rope will be:
Similarly, the radius of the EE axle is r = 0.3386 m, so the torque will be:
Finally, the inertia flywheel has to work as if it were blocked by forcing the gears in order to determine its resistance. Therefore, but only in this case, it is necessary to include a new fixed constraint to the external surface of the inertia flywheel (
Figure 12).
Forces at Play in the Situation of Emergency Braking
The situation of emergency braking, in the event that the inertia flywheel of the steam engine were to break, for example, is an extreme situation that can occur, and that should be assessed for the correct dimensioning of the engine. In this case, it would only be necessary to stop the loaded tugboat that travels along the AA axle, since stopping the tugboat on the EE axle is not so important, as the distance it travels is short, and it would be immediately braked by the water of the upper channel with no danger of losing the load.
For this reason, only the torque on the AA axle, the tensions in the pulley, gravity and, finally, the brake force on the AA axle will be considered. This force has to be equivalent to the torque applied in order to be able to stop the load. Finally, in the case studied, the inertia flywheel would be released from the previously imposed fixed constraint and be able to rotate freely.
To characterize the AA axle brake, it would be necessary to study in detail the properties of the wooden brake that comes into contact with the inertia flywheel, specifically the friction coefficient of the wood. However, this coefficient changes due to a multitude of factors, such as humidity, possible surface scratching, or wear, among other causes, although an approximate value of the static friction coefficient of μ = 0.4 can be given. This value, excessively low, is of great help in calculating the force that must be exerted on the brake bar AA to stop the tugboat in the case of breakage of the transmission mechanism.
The brake consists of 16 pieces with an approximate surface area of 0.111 m2 each, which means a total braking area of 1.775 m2. In addition, it is known that the force that must be exerted on the perimeter of the drum must be able to cancel out the torque applied on the AA axle with a value of MAA = 22,058.11 Nm, according to Equation (2), but on his own inertia flywheel, which has a radius of value r = 2.511 m, which is greater than the radius of the drum.
With these data, it is now possible to calculate the pressure that the brake must exert on the inertia flywheel.
Thus, the pressure that must be exerted is finally due to the force applied to the brake bar, and this is obtained by multiplying the calculated pressure P by the braking surface S.
As can easily be verified, this force (
Figure 13) is equivalent to lifting something of more than 2 tons, so the loaded tugboat could not be manually stopped with the brake alone. This makes sense, since the trailer has a mass of around 8 tons. Thus, even if the coefficients of friction were higher and the force about half, it would still be excessive to brake manually. As has been demonstrated, although William Reynolds devised a complex system of levers and articulations to decrease the force necessary to stop a tugboat that is falling freely, the force that must be exerted continues to exceed the capacity of a single human operator.
In any case, in this research, the behavior of the engine will be analyzed in a hypothetical case in which such a force could be exerted on the braking bar, although this situation would be highly unlikely.
2.2.5. Meshing
The last step before beginning the static analysis consists of the geometric discretization or meshing of the engine. Most software that performs an FEA uses tetrahedral elements, type tetra 10 (4 physical points and 10 nodes). If the simulation is more complex, for example, in dynamic analysis or in static analysis of complex geometries, some software uses hexahedral volumes, such as hexa 8, hexa 20 or hexa 27 for meshing. The use of the hexahedron allows the mesh to be formed by elements of greater volume, and therefore it needs a smaller number of elements to generate all of the geometry of the model. The choice of hexahedral meshes decreases the computational requirements and saves time, but results in less accurate results, since the total number of nodes is reduced and the mesh is less suited to the real geometry. In an analysis such as the present study, there is no problem in using tetra 10, since the total number of elements to analyze is not excessive.
Therefore, in FEA analysis, the elements used were tetrahedrons with 4 nodes and first order integration (constant interpolation of the stress and strain). The elements are formulated in a 3D scheme with three degrees of freedom per node (translational in X, Y and Z directions). However, a sensitivity analysis of the size of the element has not been carried out, since the structure is oversized.
On the other hand, the specific software used in the analysis of thermal parameters or lighting uses bar elements or shell elements. These elements of lower order than those used in the present study could also be used for the static or modal analysis of a mechanism, but it would require a much larger number of nodes to simulate its geometry, and therefore for a computer with a standard processor, these meshes would need an excessive time in their calculations. Regarding the shell elements, although they are capable of capturing the stress gradients in a more efficient way, they have not been used in this study, since the mechanism is oversized, and because it would provide an accuracy that would not change the conclusions in a significant way.
Autodesk Inventor Professional can automatically generate a mesh based on the size of the element to be discretized. By default, it generates tetrahedra whose average size is 10% of the length of the element, a minimum size of the tetrahedron of 20% of the average size, a maximum variation between tetrahedra of 1.5 and a maximum angle of rotation of 60°.
However, it is advisable to pay more attention to the places where the geometry is complex, since in these parts, the mesh usually gives results that differ greatly from the actual geometry of the element. For these singular places, the software offers the possibility of carrying out a manual meshing of the element in which the mesh size is determined. In addition, in general lines, it should be mentioned that in places where the concentration of stress is greater, it is also convenient to increase the density of the mesh.
Figure 14 shows the meshing result that is generated automatically by Autodesk Inventor Professional.
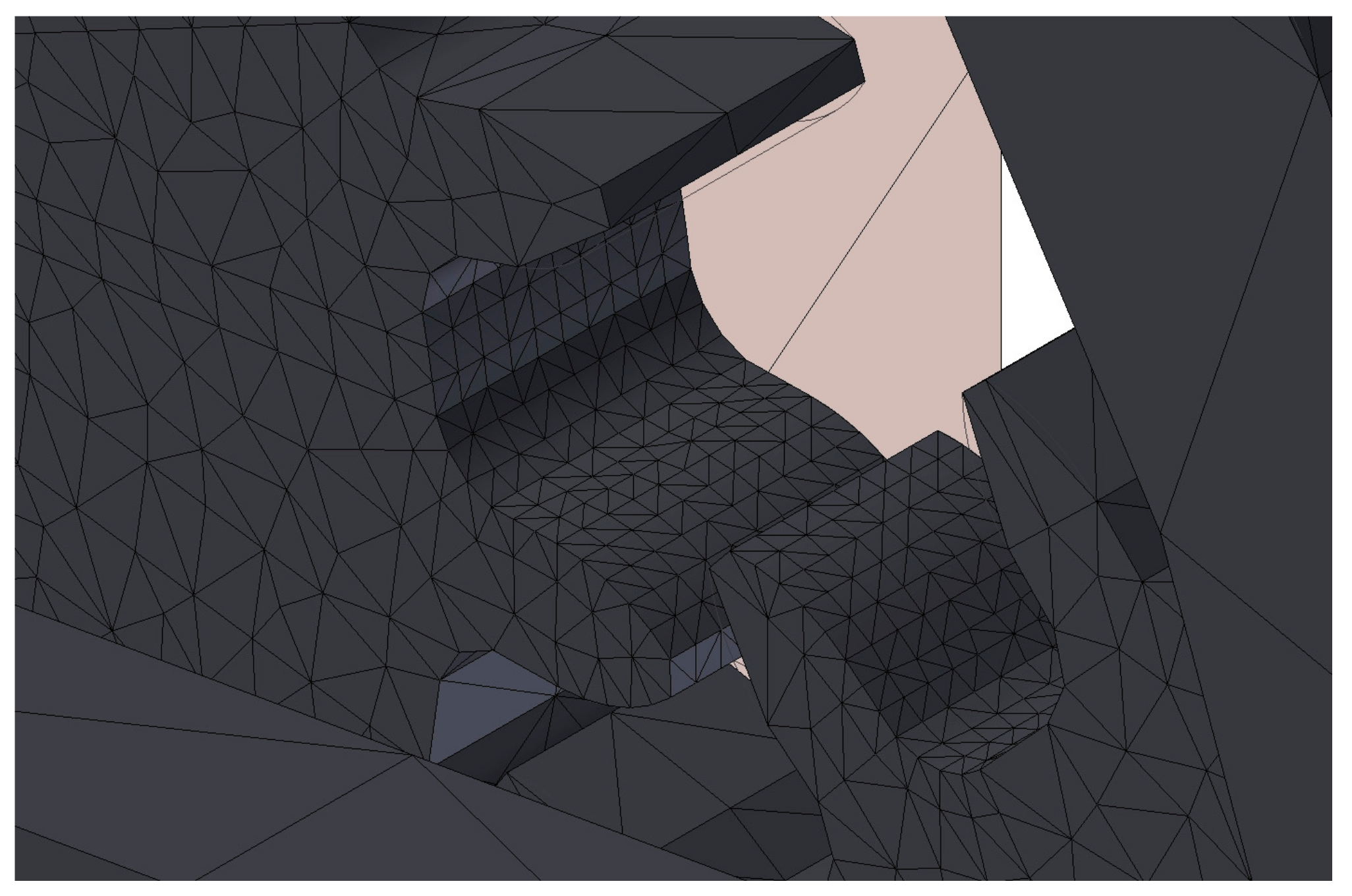
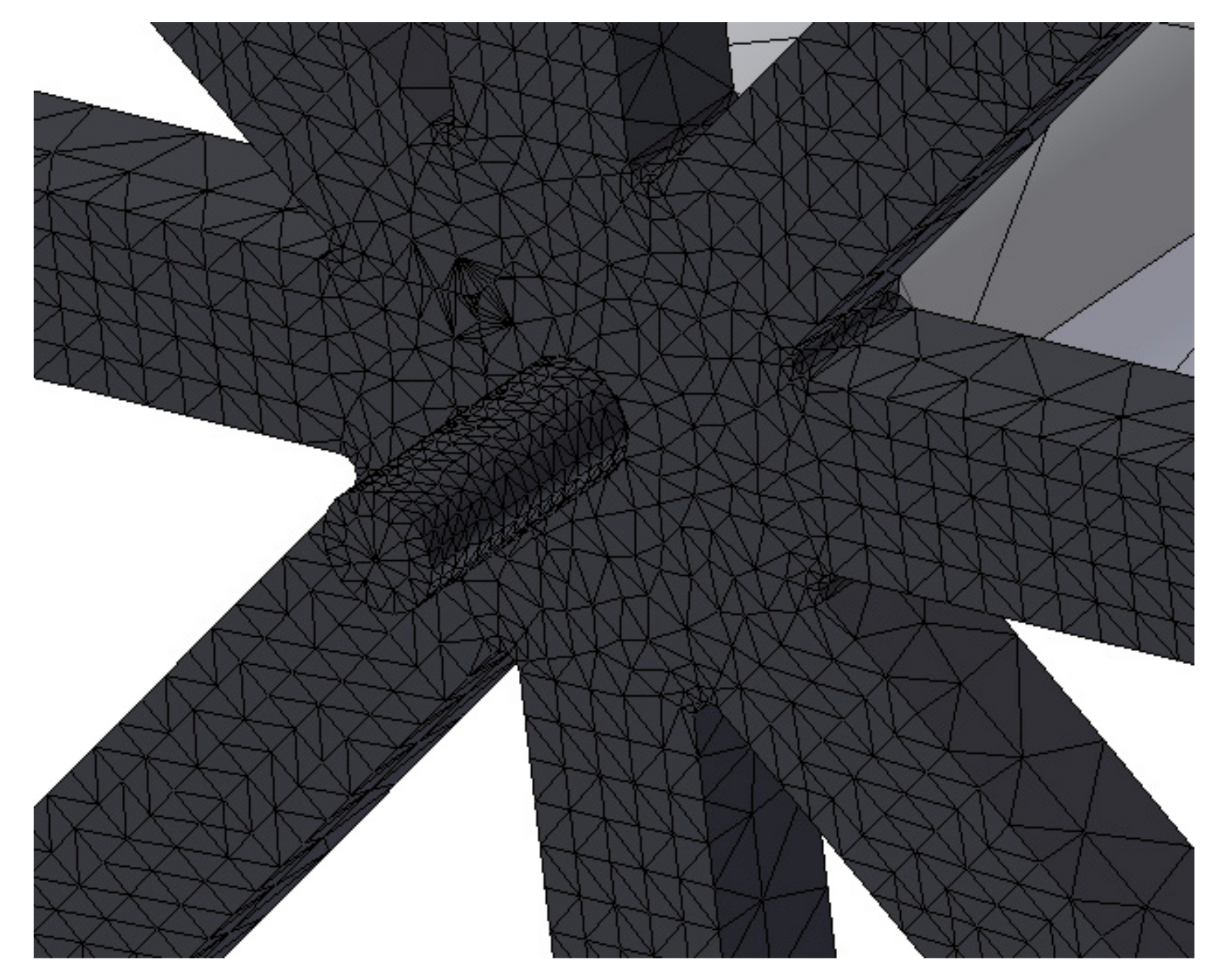
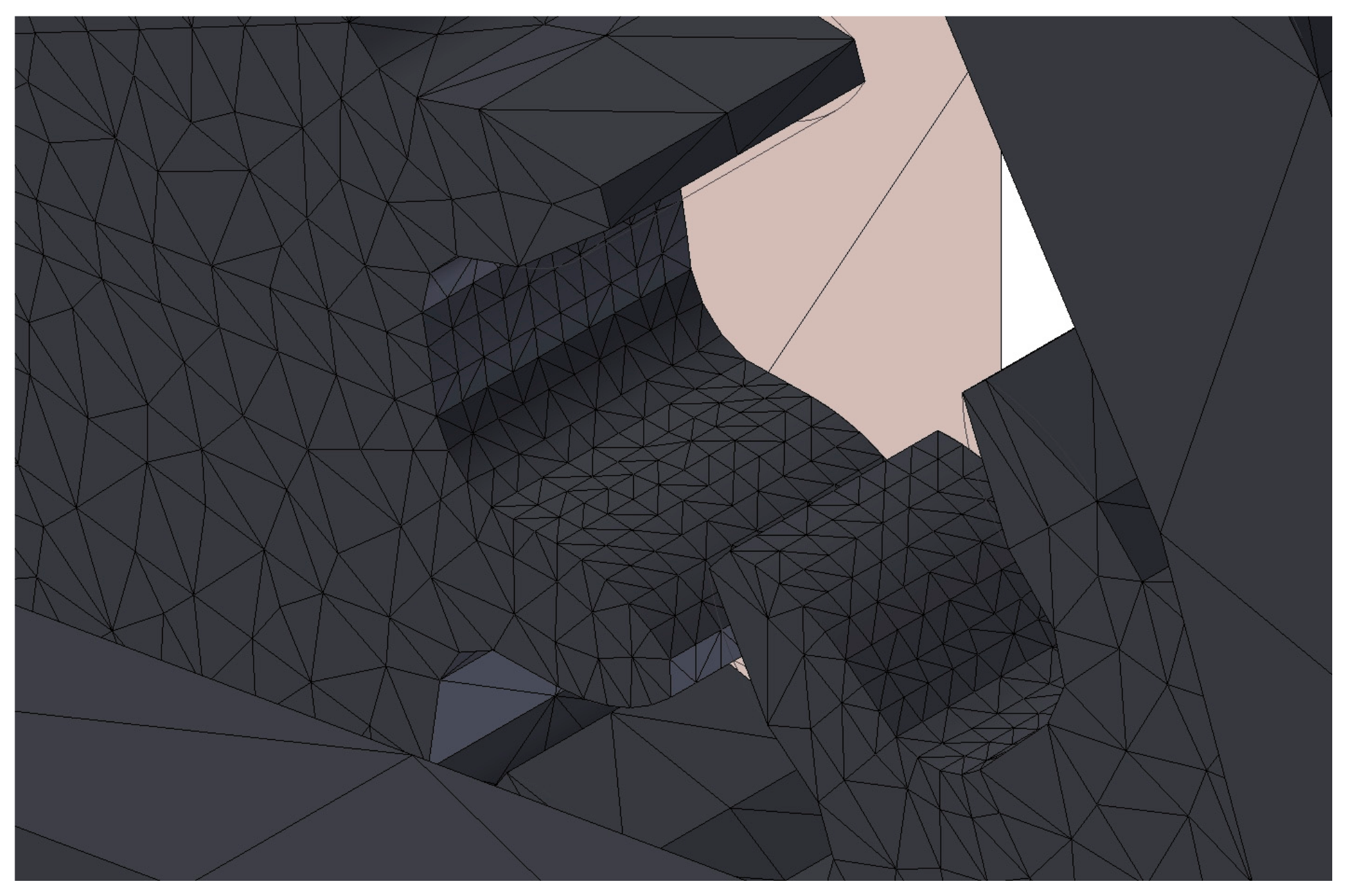
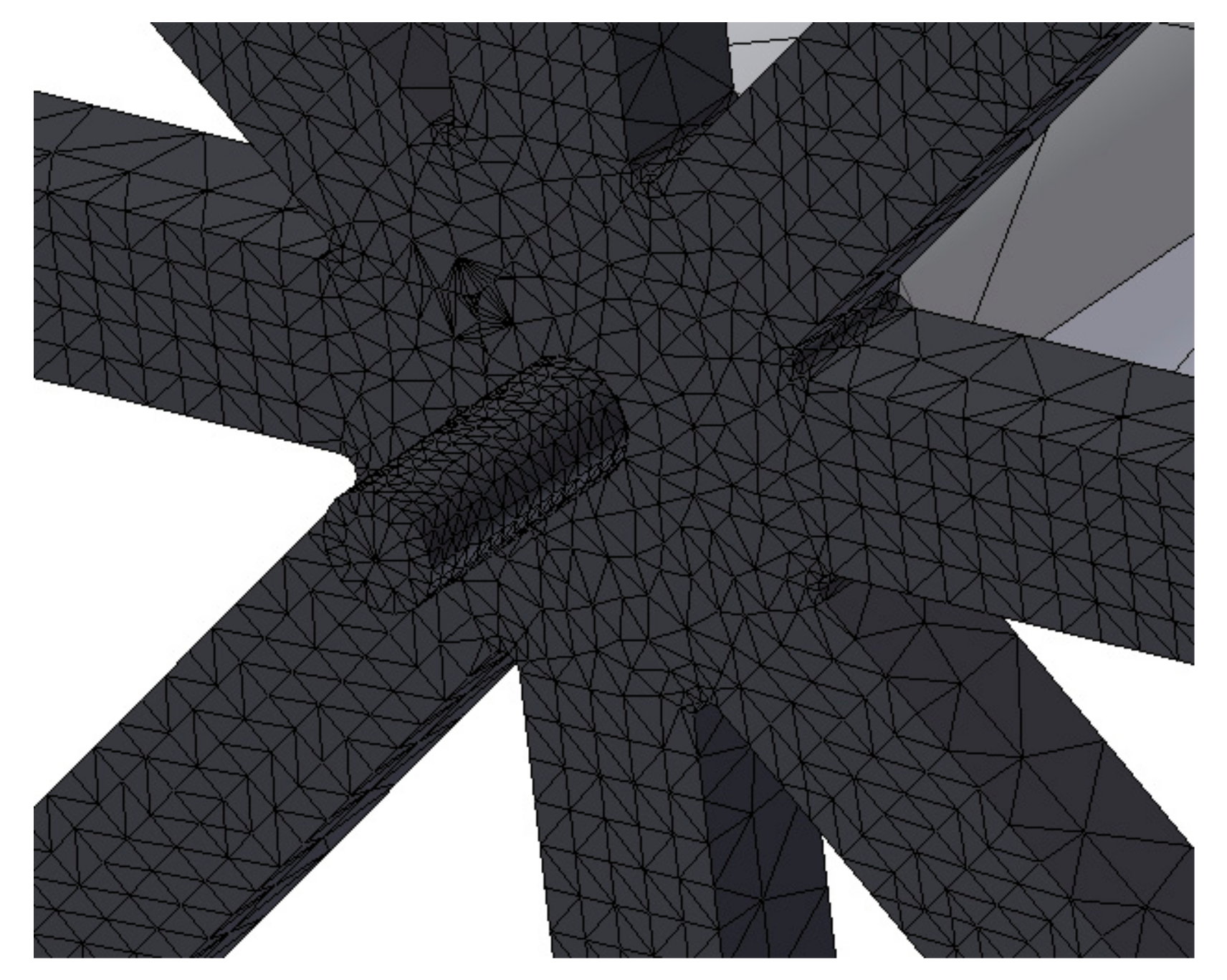
In the present research, it was also necessary to modify the discretization in some places, performing a refinement of the mesh. Specifically, this was done in the contacts between the teeth of adjacent gears (
Figure 15) and on the surfaces of the ends of the axles in contact with their supports (
Figure 16). In the first case, the reason for this intervention was the complicated geometry of the tooth of the gear, while in the second case, the reason lay in the concentration of the stresses.
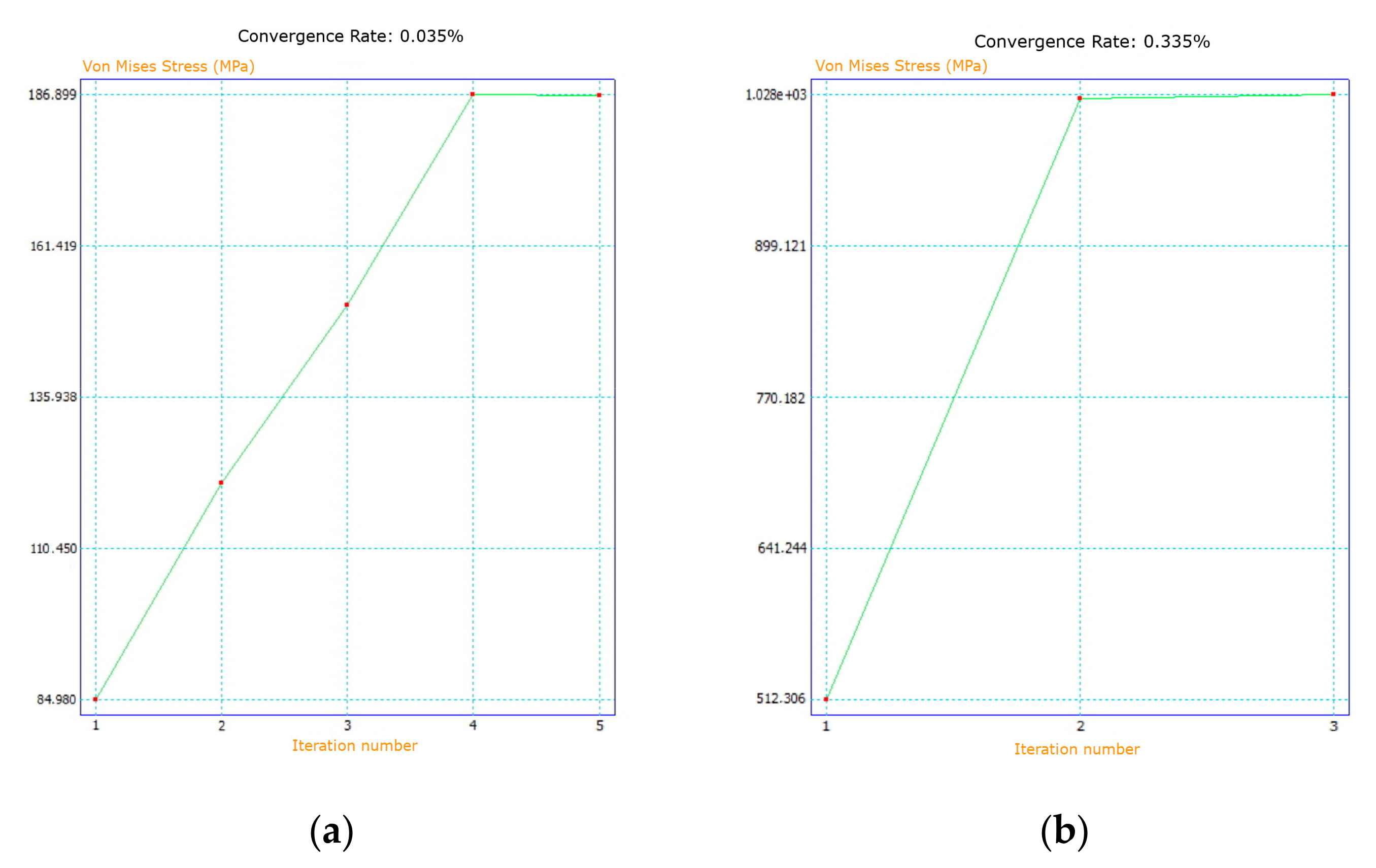
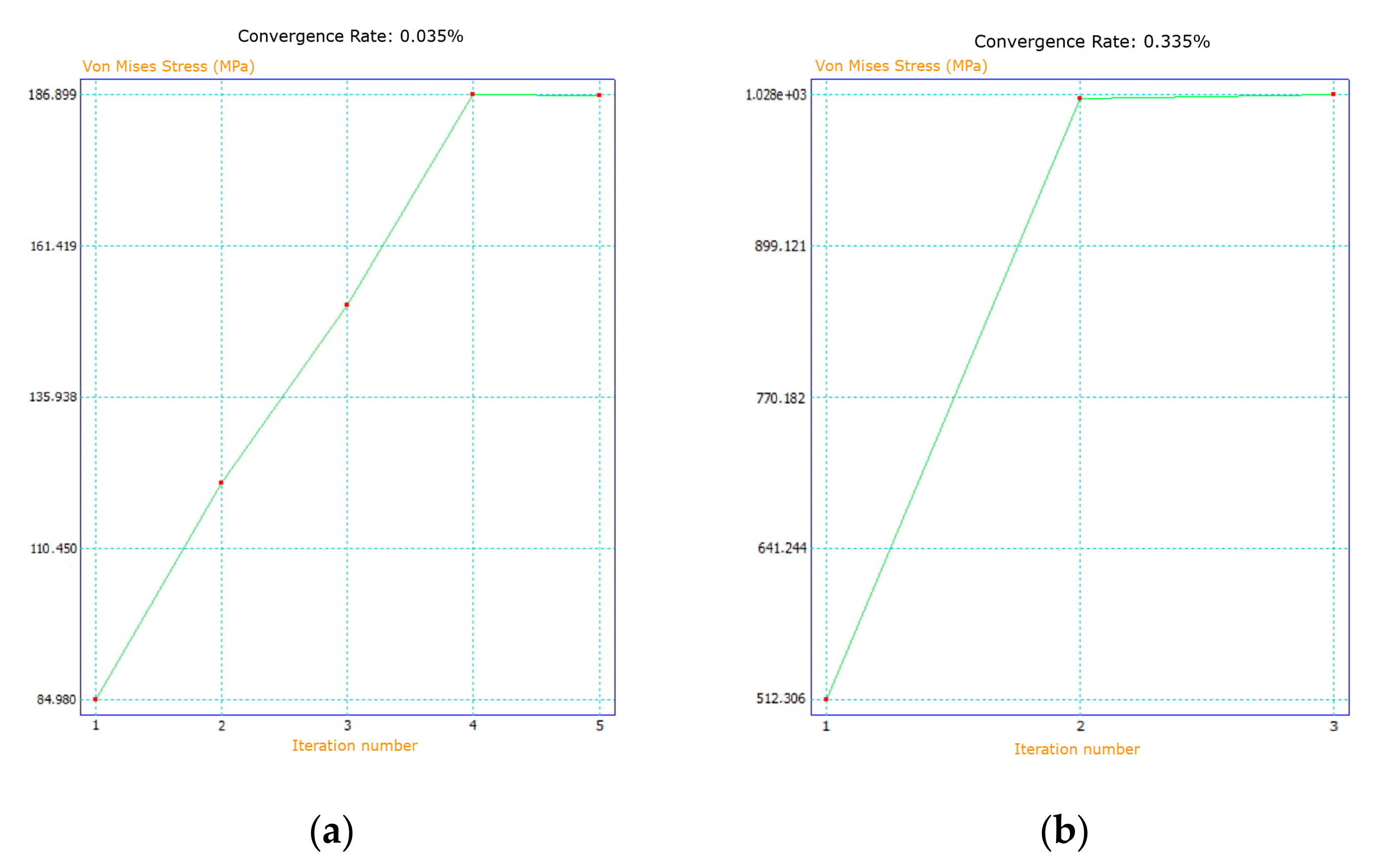
To conclude this section, it must be emphasized that for static analysis, it is necessary to establish a convergence criterion since iterative processes are used in this analysis. Thus, the result obtained is compared with the previous analysis and when it differs by less than 5% the process stops. In this research, and taking into account the computational resources available, the analysis used a mesh of 1,028,444 elements and 1,660,194 nodes in the blocking situation, and in the situation of emergency braking a mesh of 1,417,521 elements and 2,237,388 nodes.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}