A Novel Virtual Sensor for Estimating Robot Joint Total Friction Based on Total Momentum


Abstract
:1. Introduction
2. Design of a Virtual Sensor for Estimating Joint Friction
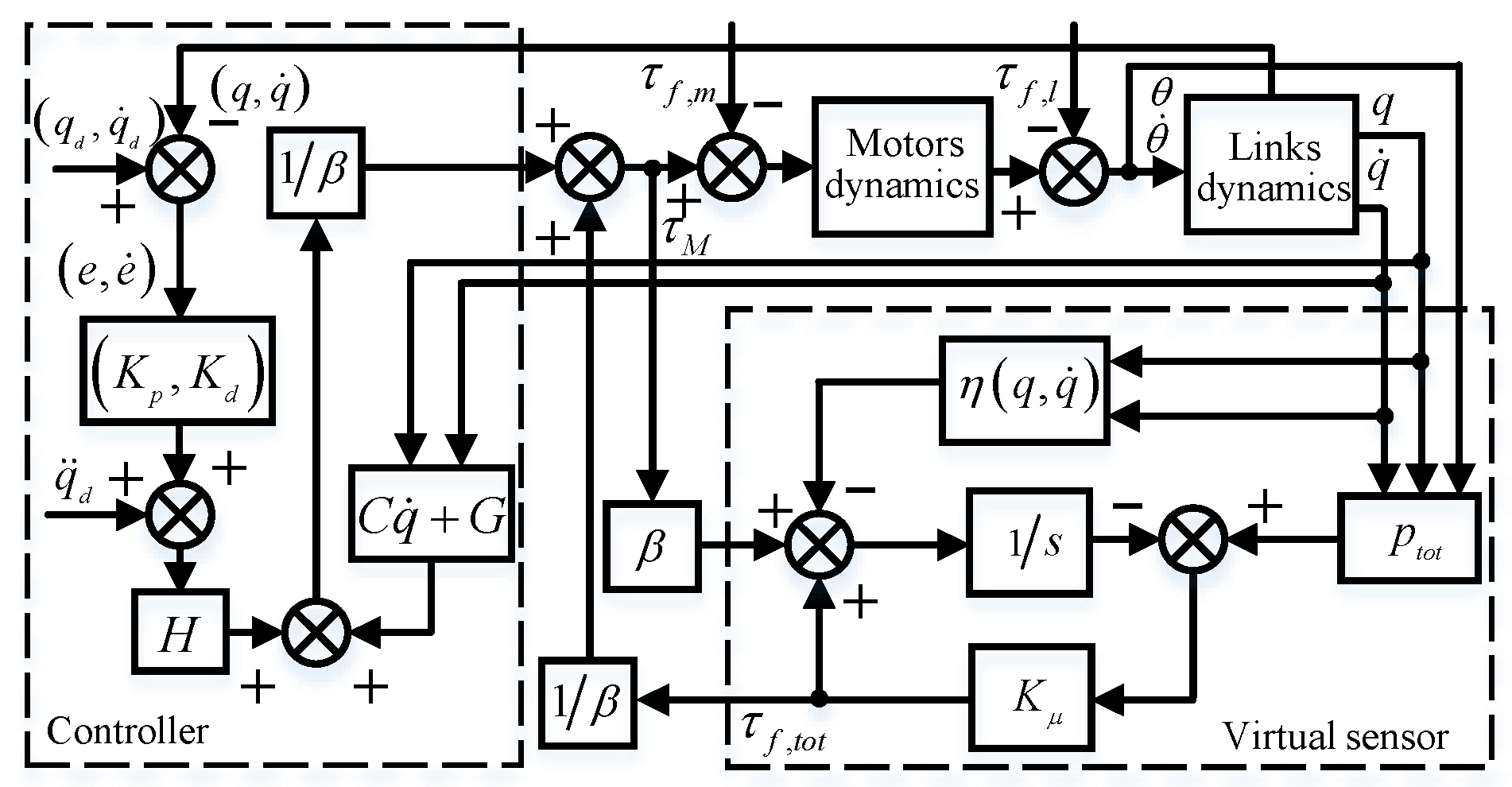
2.1. Design of a Virtual Sensor
2.2. System Stability Analysis
3. Simulation and Analysis
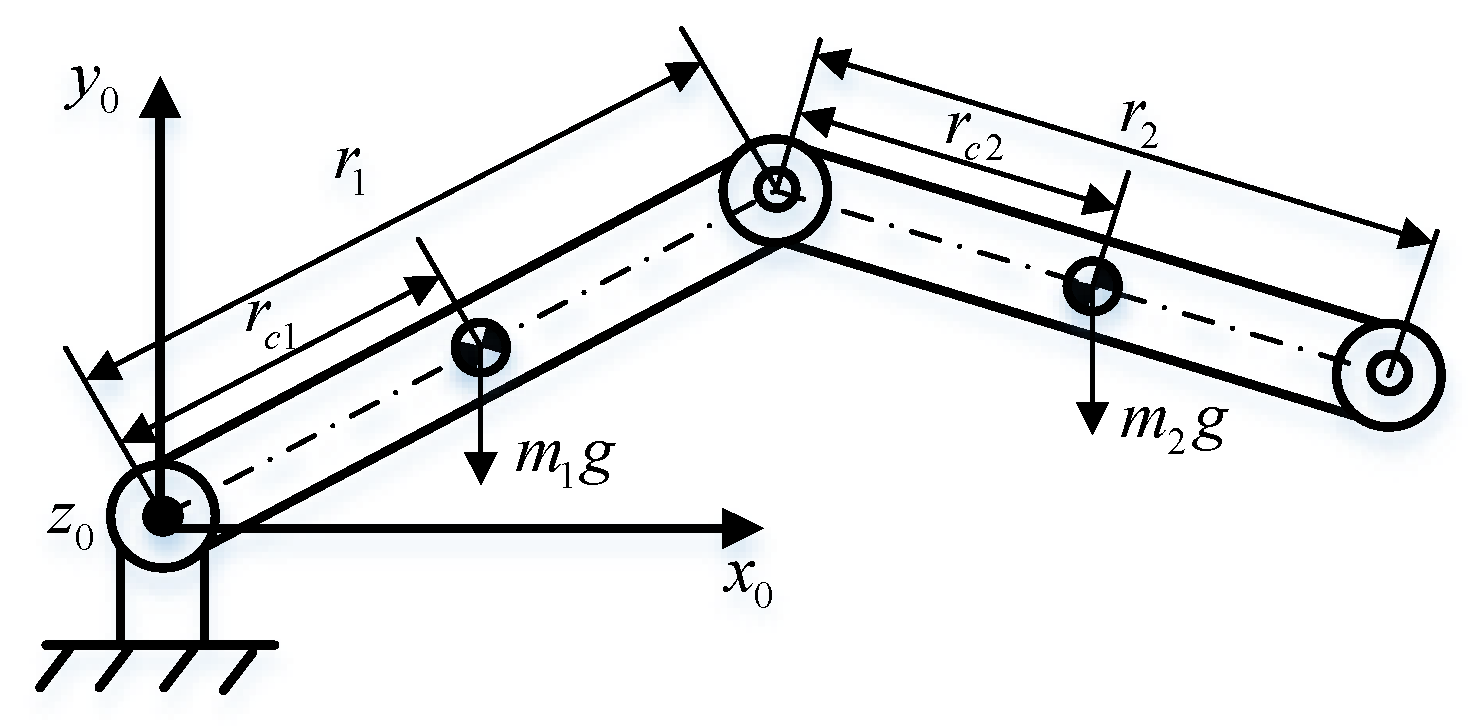
3.1. Simulation Setup
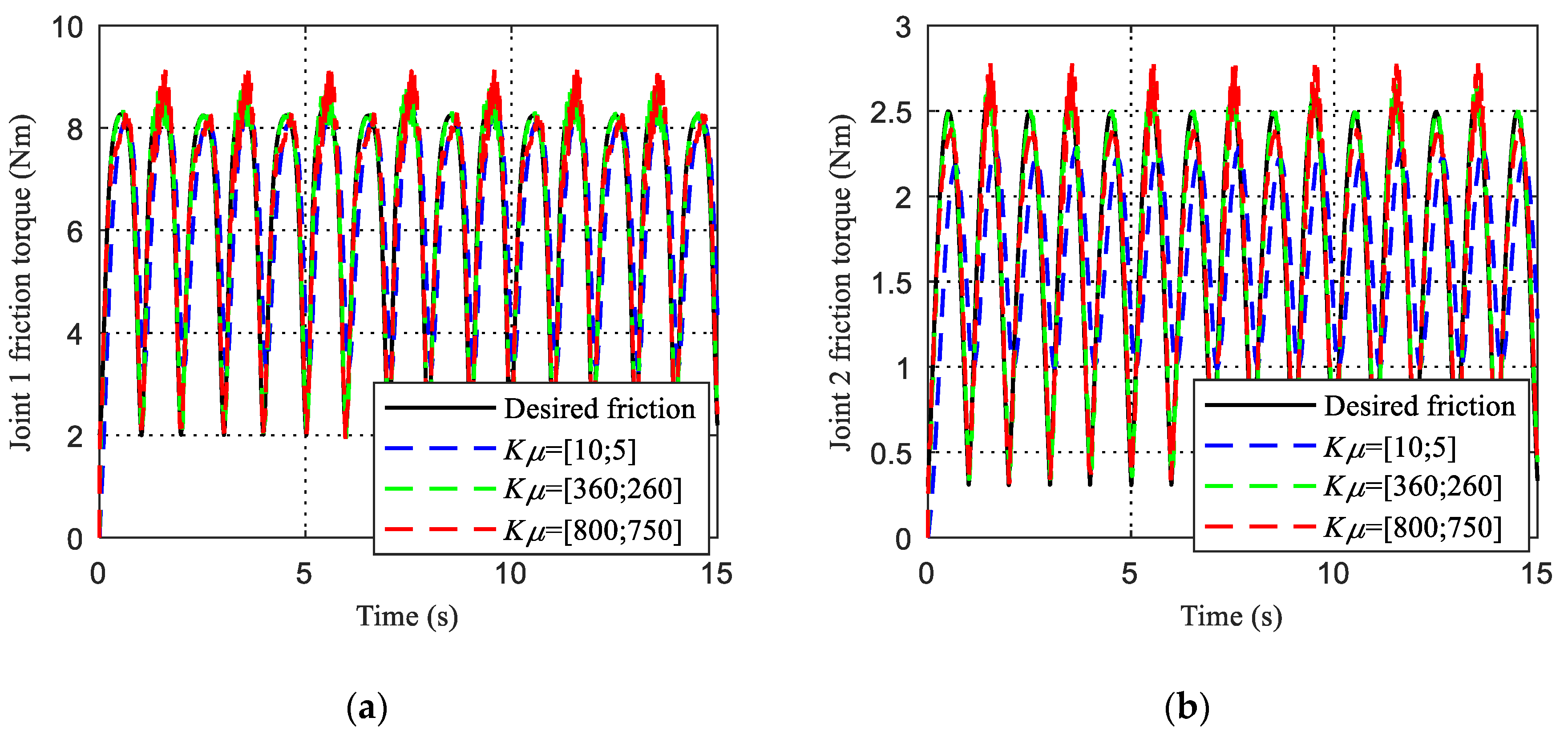
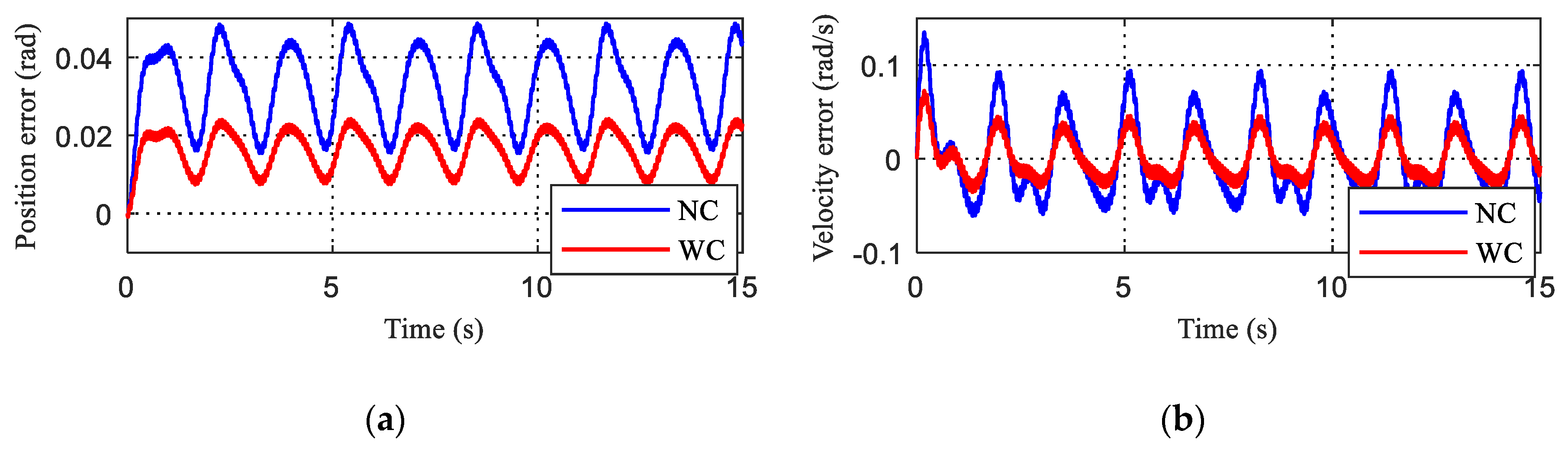
3.2. Simulation Results and Analysis
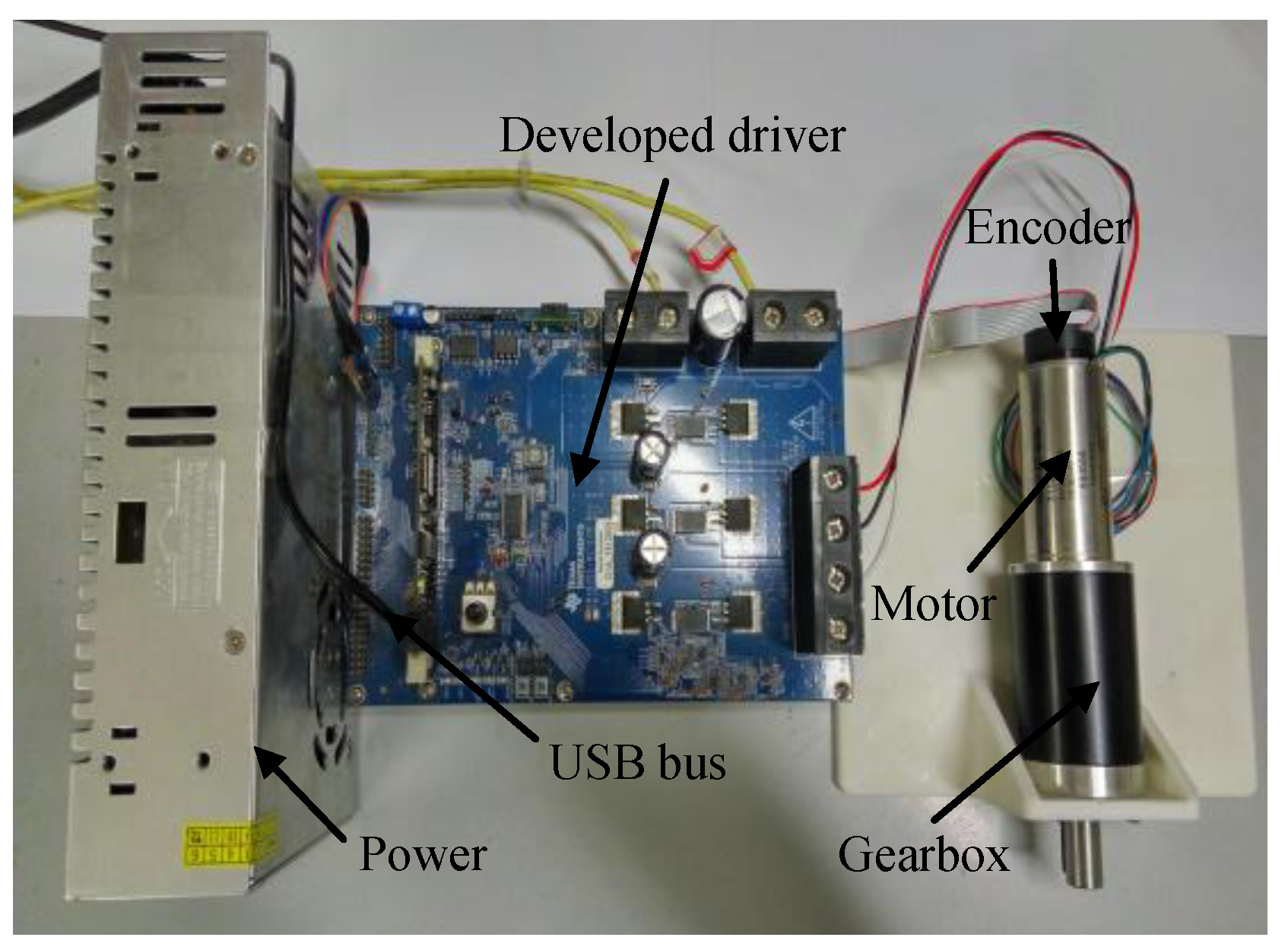
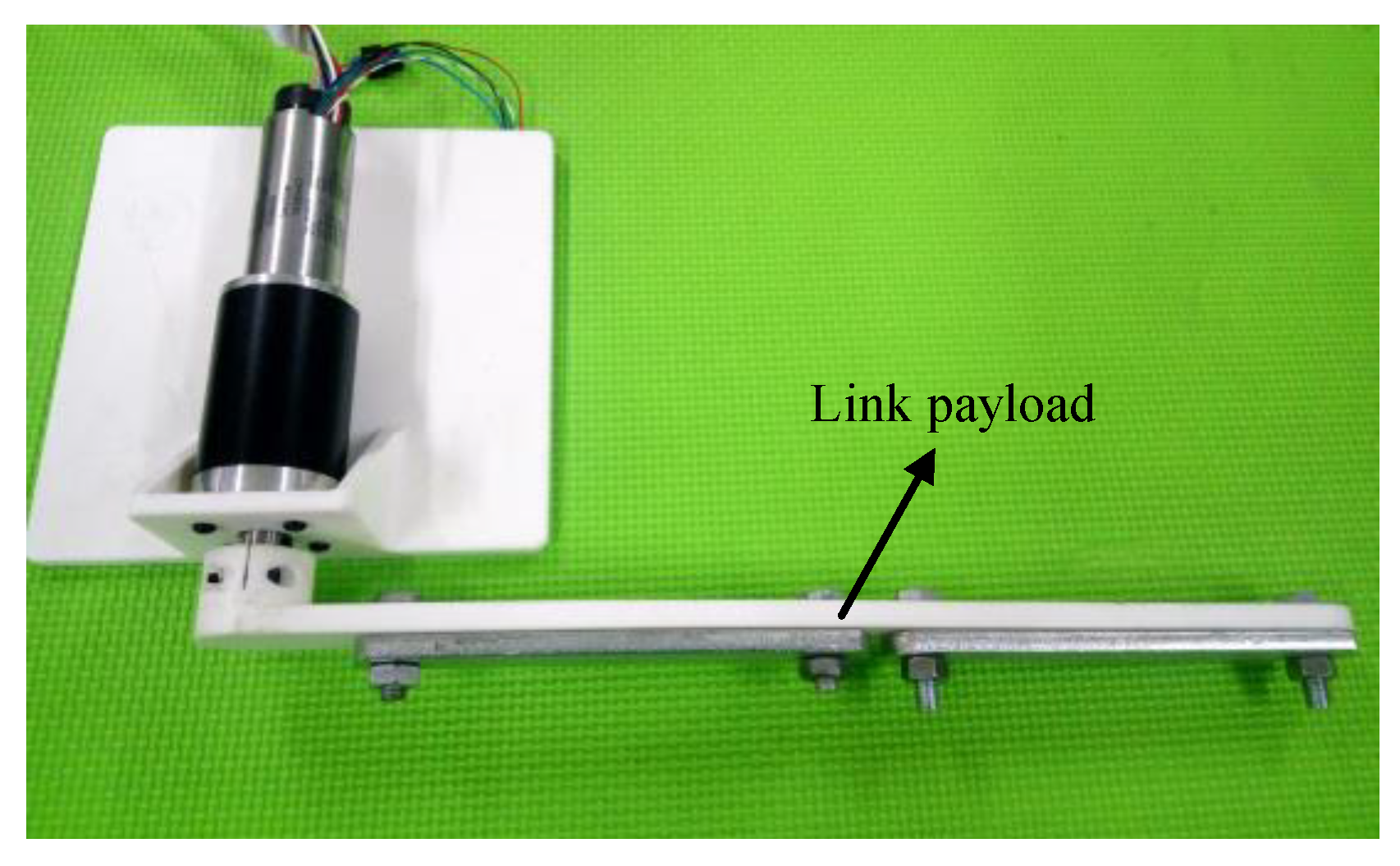
4. Experiment and Analysis
4.1. Velocity Step Experiment
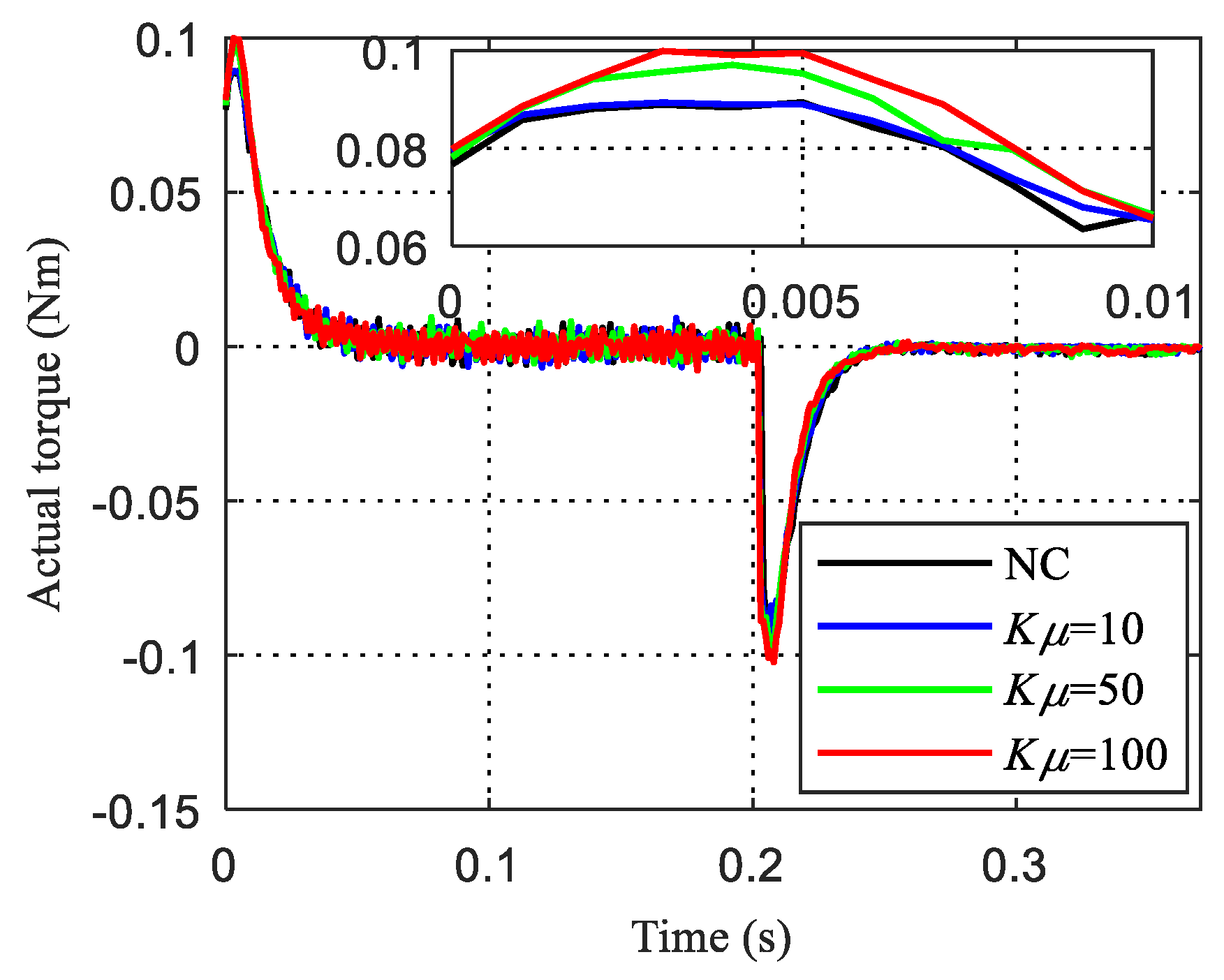
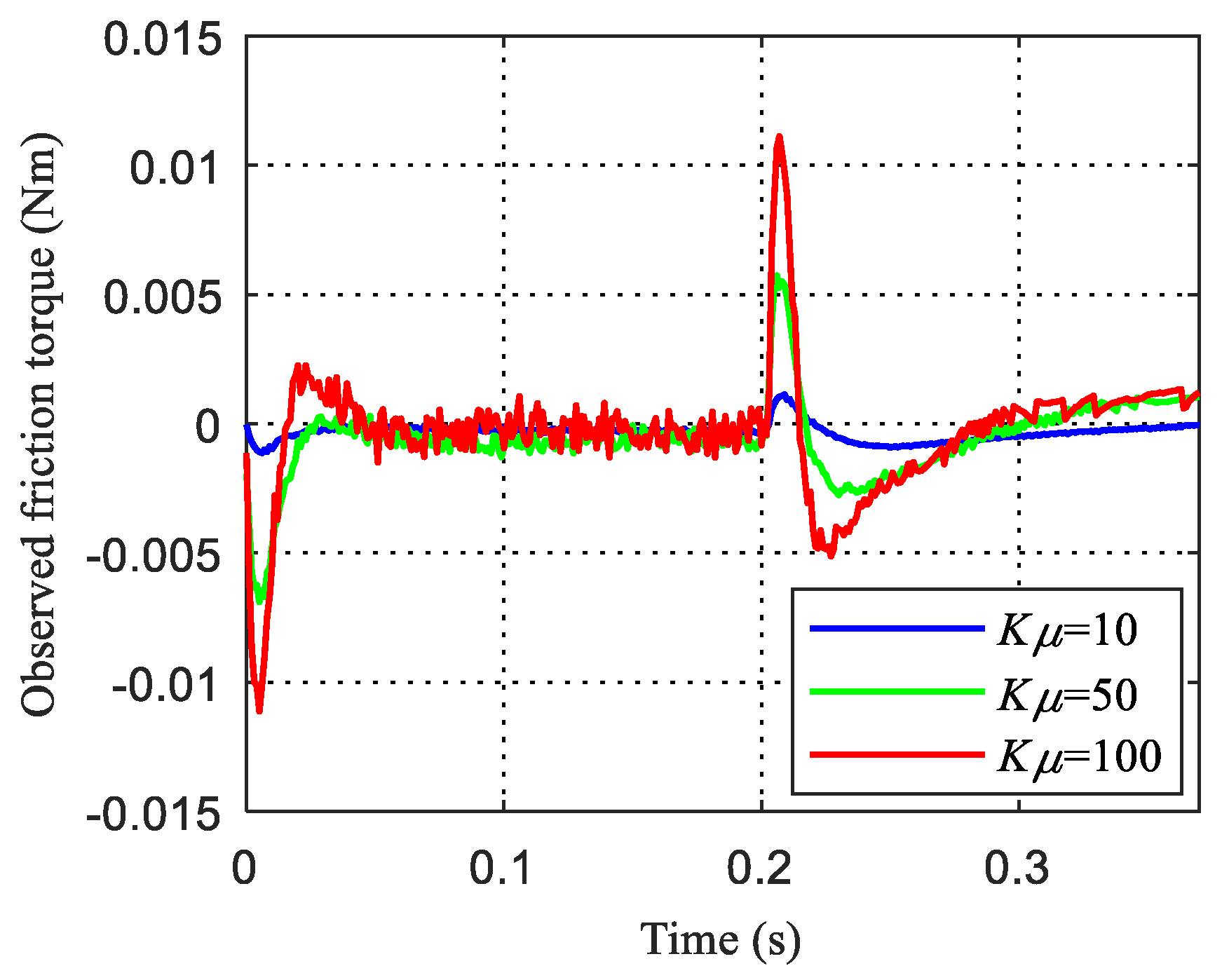
4.1.1. Motor Low-Velocity Experiment
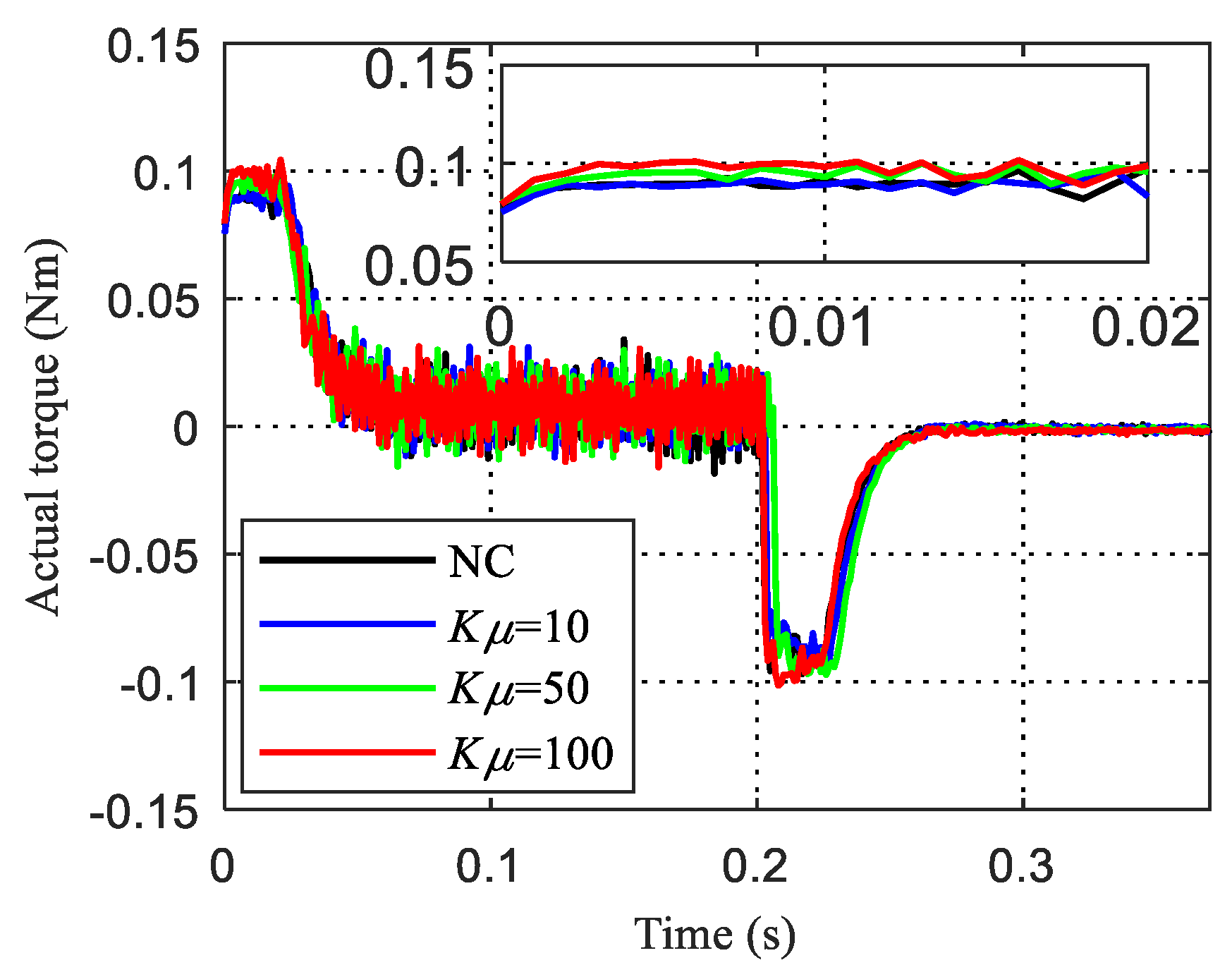
4.1.2. Motor High-Velocity Experiment
4.2. Sinusoidal Trajectory Tracking Experiment
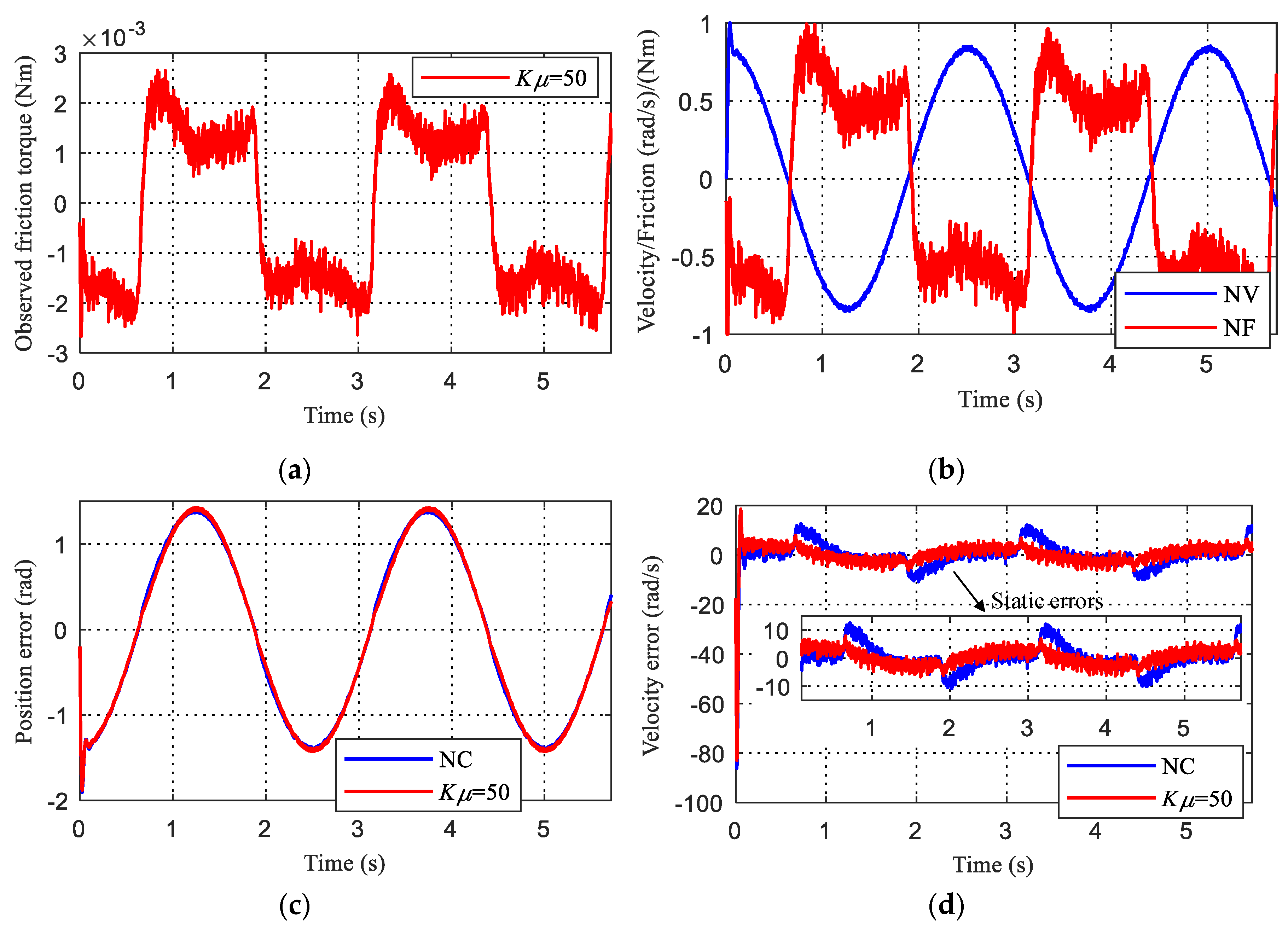
4.2.1. Motor Low-Velocity Experiment
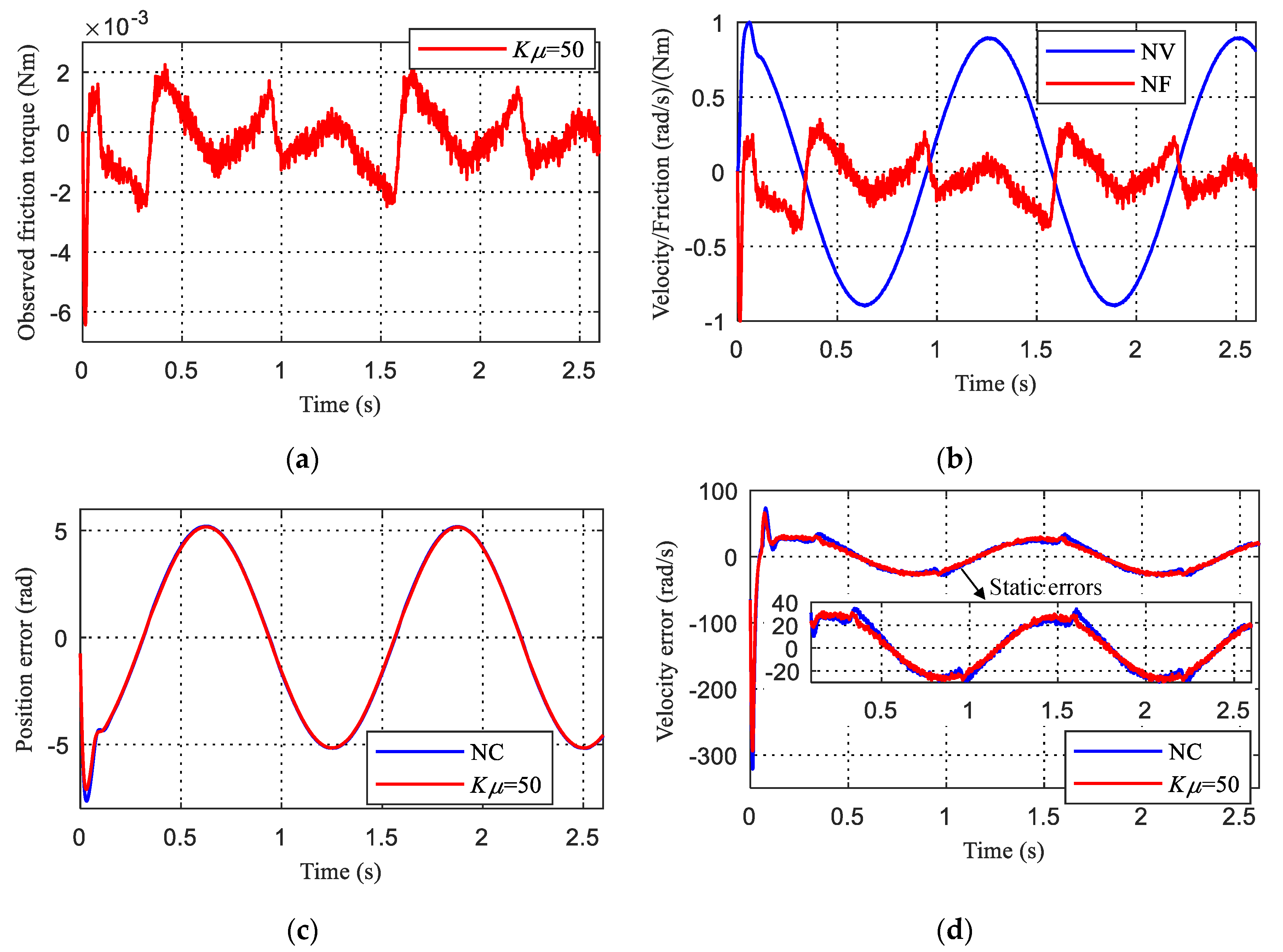
4.2.2. Motor High-Velocity Experiment
4.3. Payload Experiment
4.3.1. Motor Low-Velocity Experiment
4.3.2. Motor High-Velocity Experiment
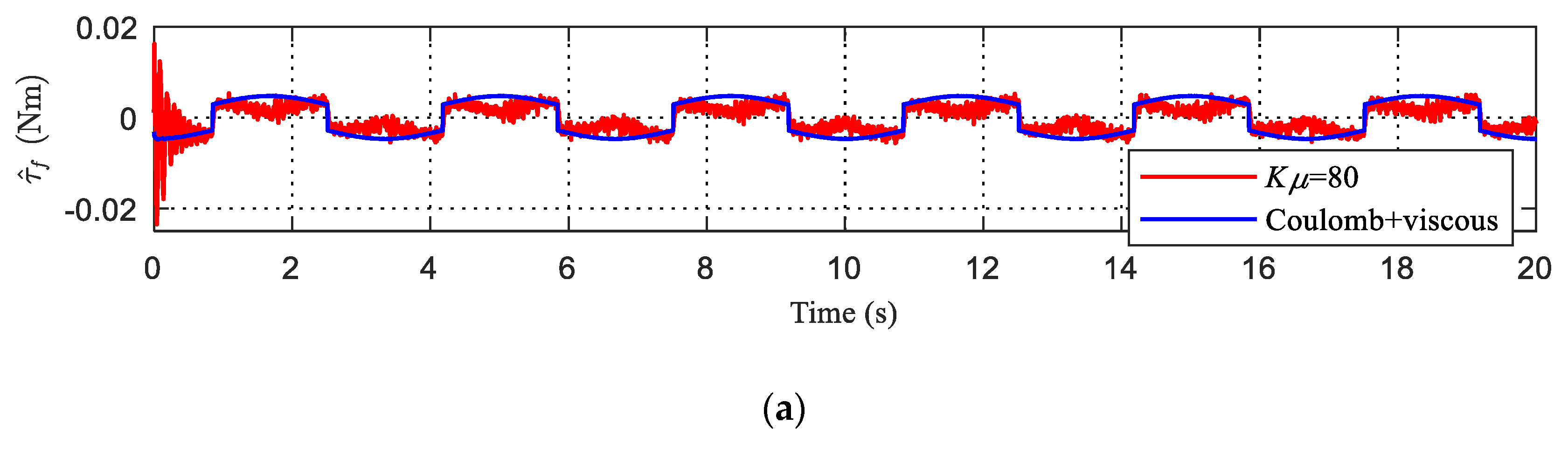
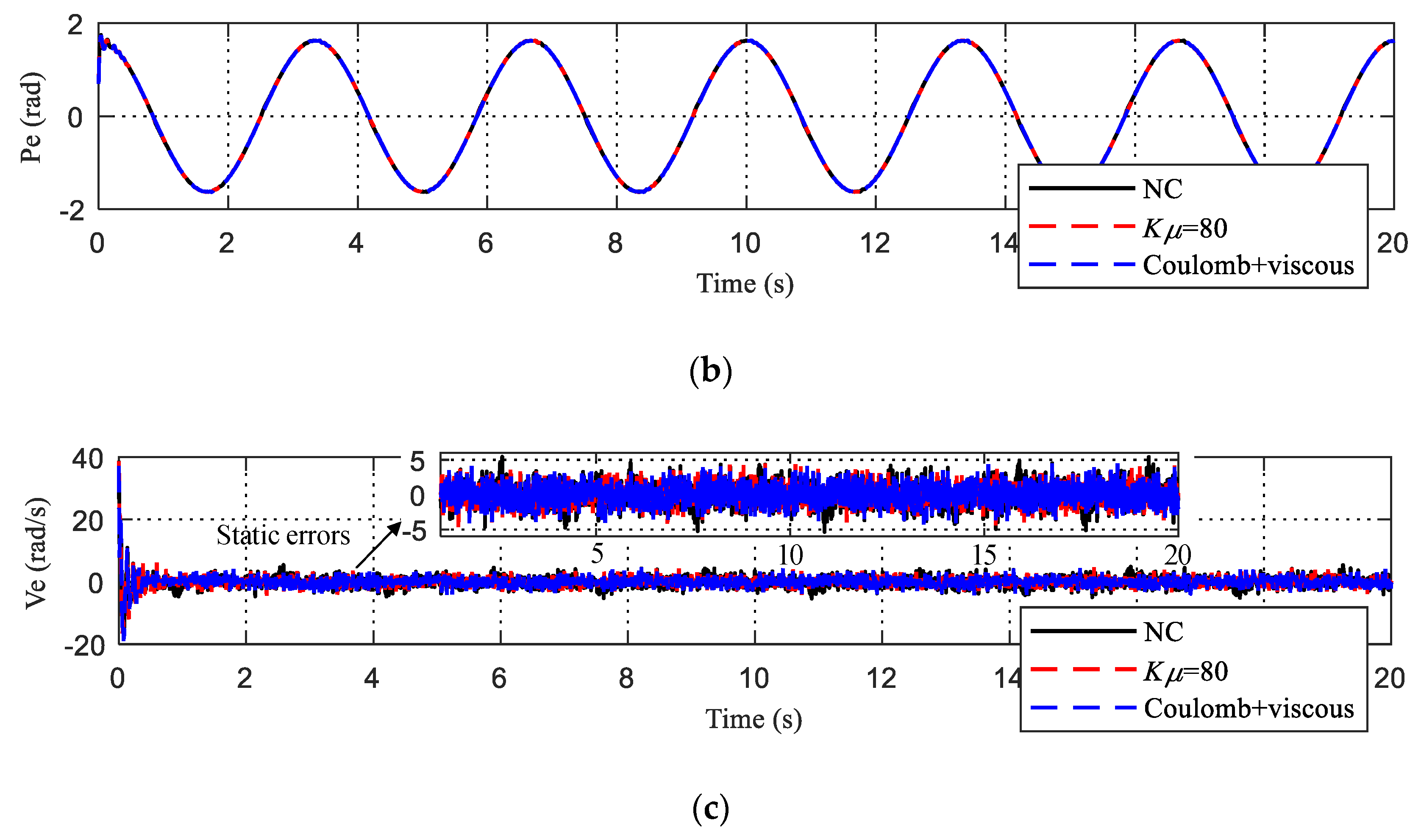
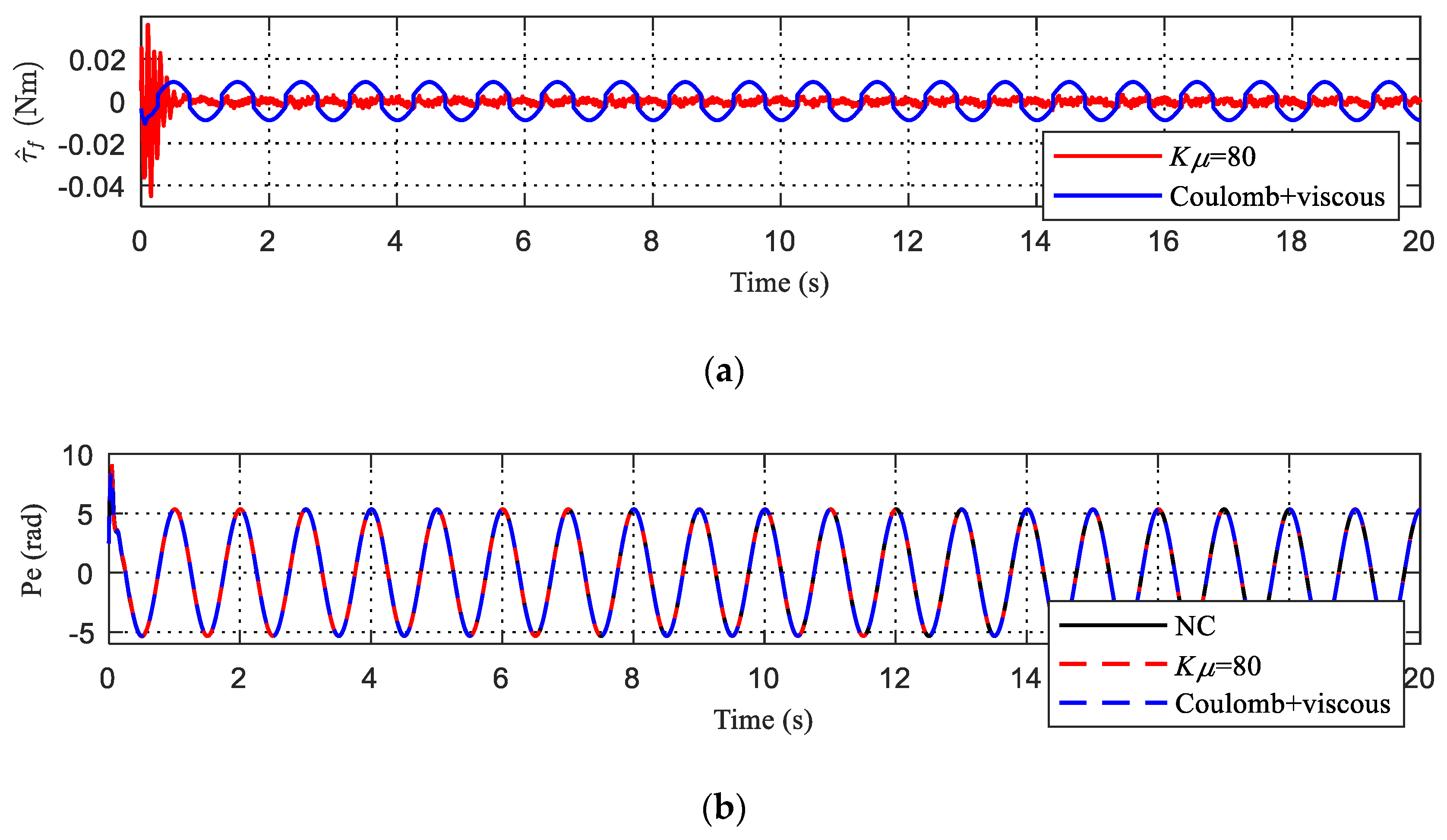
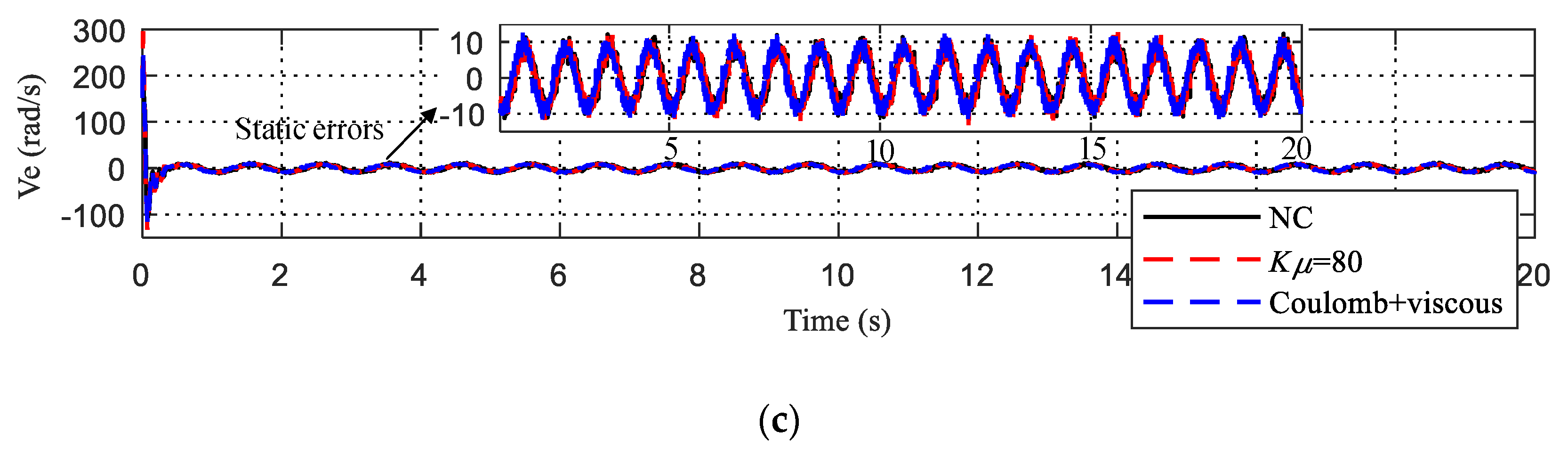
4.3.3. Comparison with the Classical Friction Model
5. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Kolegain, K.; Léonard, F.; Chevret, S.; Attar, A.B.; Abba, G. Robotic Friction Stir Welding Path Planning with Deflection Compensation Using B-Splines; Springer: Cham, Switzerland, 2019; pp. 264–271. ISBN 978-3-319-78962-0. [Google Scholar]
- Do, T.N.; Tjahjowidodo, T.; Lau, M.W.S.; Phee, S.J. Nonlinear friction modelling and compensation control of hysteresis phenomena for a pair of tendon-sheath actuated surgical robots. Mech. Syst. Signal Process. 2015, 60, 770–784. [Google Scholar] [CrossRef]
- Ossadnik, D.; Guadarrama-Olvera, J.R.; Dean-Leon, E.; Cheng, G. Adaptive Friction Compensation for Humanoid Robots without Joint-Torque Sensors. In Proceedings of the IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018; pp. 980–985. [Google Scholar]
- Kermani, M.R.; Wong, M.; Patel, R.V.; Moallem, M.; Ostojic, M. Friction compensation in low and high-reversal-velocity manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 4320–4325. [Google Scholar]
- Miyasaka, M.; Matheson, J.; Lewis, A.; Hannaford, B. Measurement of the cable-pulley coulomb and viscous friction for a cable-driven surgical robotic system. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 804–810. [Google Scholar]
- Plooij, M.; Wolfslag, W.; Wisse, M. Robust feedforward control of robotic arms with friction model uncertainty. Robot. Auton. Syst. 2015, 70, 83–91. [Google Scholar] [CrossRef]
- Cherkasov, O.Y.; Zarodnyuk, A.V.; Bugrov, D.I. Range maximization and brachistochrone problem with Coulomb friction, viscous drag and accelerating force. In Proceedings of the 11th International Conference on Mathematical Problems in Engineering, Aerospace and Sciences, La Rochelle, France, 4–8 July 2016. [Google Scholar]
- Guo, S.; Xu, C.; Xiao, N.; Bao, X.; Zhao, Y.; Yang, C.; Shen, R. Cable-driven interventional operation robot with Stribeck friction feedforward compensation. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 1787–1791. [Google Scholar]
- Armstrong-Helouvry, B. Control of Machines with Friction; Springer Science & Business Media: New York, NY, USA, 2012; ISBN 978-1-4613-6774-1. [Google Scholar]
- Piatkowski, T. Dahl and lugre dynamic friction models—The analysis of selected properties. Mech. Mach. Theory 2014, 73, 91–100. [Google Scholar] [CrossRef]
- Peyret, N.; Rosatello, M.; Chevallier, G.; Dion, J.L. A mindlin derived dahl friction model. Mech. Mach. Theory 2017, 117, 48–55. [Google Scholar] [CrossRef]
- Pennestrì, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and comparison of dry friction force models. Nonlinear Dyn. 2016, 83, 1785–1801. [Google Scholar] [CrossRef]
- Saltiel, S.; Bonner, B.; Mittal, T.; Delbridge, B.; Ajo-Franklin, J. Experimental measurements and bristle friction modeling of nonlinear hysteresis loops and harmonic generation in rock fractures. J. Acoust. Soc. Am. 2017, 142, 2723. [Google Scholar] [CrossRef]
- Sobczyk, M.R.; Gervini, V.I.; Perondi, E.A.; Cunha, M.A. A continuous version of the LuGre friction model applied to the adaptive control of a pneumatic servo system. J. Frankl. Inst. 2016, 353, 3021–3039. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W.; Jiao, Z. Adaptive control of hydraulic actuators with lugre model based friction compensation. IEEE Trans. Ind. Electron. 2015, 62, 6469–6477. [Google Scholar] [CrossRef]
- Saha, A.; Wahi, P.; Wiercigroch, M.; Stefański, A. A modified lugre friction model for an accurate prediction of friction force in the pure sliding regime. Int. J. Non-Linear Mech. 2016, 80, 122–131. [Google Scholar] [CrossRef]
- Simoni, L.; Beschi, M.; Legnani, G.; Visioli, A. Friction modeling with temperature effects for industrial robot manipulators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 3524–3529. [Google Scholar]
- Simoni, L.; Beschi, M.; Legnani, G. Modelling the temperature in joint friction of industrial manipulators Modelling the temperature in joint friction of industrial manipulators. Robotica 2017, 37, 906–927. [Google Scholar] [CrossRef]
- Gao, L.; Yuan, J.; Han, Z.; Wang, S.; Wang, N. A friction model with velocity, temperature and load torque effects for collaborative industrial robot joints. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3027–3032. [Google Scholar]
- Bisoffi, A.; Da Lio, M.; Teel, A.R.; Zaccarian, L. Global asymptotic stability of a PID control system with Coulomb friction. IEEE Trans. Autom. Control 2017, 63, 2654–2661. [Google Scholar] [CrossRef]
- Kang, S.; Yan, H.; Dong, L.; Li, C. Finite-time adaptive sliding mode force control for electro-hydraulic load simulator based on improved GMS friction model. Mech. Syst. Signal Process. 2018, 102, 117–138. [Google Scholar] [CrossRef]
- Lyshevski, S.E. Control of high-precision direct-drive mechatronic servos: Tracking control with adaptive friction estimation and compensation. Mechatronics 2017, 43, 1–5. [Google Scholar] [CrossRef]
- Ren, C.; Li, X.; Yang, X.; Ma, S. Extended State Observer based Sliding Mode Control of an Omnidirectional Mobile Robot with Friction Compensation. IEEE Trans. Ind. Electron. 2019, 66, 9480–9489. [Google Scholar] [CrossRef]
- Yang, X.; Liu, H.; Xiao, J.; Zhu, W.; Liu, Q.; Gong, G.; Huang, T. Continuous Friction Feedforward Sliding Mode Controller for a TriMule Hybrid Robot. IEEE/ASME Trans. Mech. 2018, 23, 1673–1683. [Google Scholar] [CrossRef]
- Bona, B.; Indri, M. Friction compensation in robotics: An overview. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 12–15 December 2005; pp. 4360–4367. [Google Scholar]
- Yang, C.; Jiang, Y.; He, W.; Na, J.; Li, Z.; Xu, B. Adaptive parameter estimation and control design for robot manipulators with finite-time convergence. IEEE Trans. Ind. Electron. 2018, 65, 8112–8123. [Google Scholar] [CrossRef]
- Roveda, L.; Pallucca, G.; Pedrocchi, N.; Braghin, F.; Tosatti, L.M. Cartesian tasks oriented friction compensation through a reinforcement learning approach. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 895–900. [Google Scholar]
- Colomé, A.; Planells, A.; Torras, C. A friction-model-based framework for reinforcement learning of robotic tasks in non-rigid environments. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5649–5654. [Google Scholar]
- Chuei, R.; Cao, Z.; Man, Z. Friction compensator based repetitive control with application to a brushless DC servo motor. In Proceedings of the International Conference on Advanced Mechatronic Systems (ICAMechS), Melbourne, Australia, 30 November–3 December 2016; pp. 56–61. [Google Scholar]
- Bui, B.D.; Uchiyama, N.; Simba, K.R. Contouring control for three-axis machine tools based on nonlinear friction compensation for lead screws. Int. J. Mach. Tools Manuf. 2016, 108, 95–105. [Google Scholar] [CrossRef]
- Nazari, V.; Surgenor, B. Improved position tracking performance of a pneumatic actuator using a fuzzy logic controller with velocity, system lag and friction compensation. Int. J. Control Autom. Syst. 2016, 14, 1376–1388. [Google Scholar] [CrossRef]
- Zamani, A.A.; Tavakoli, S.; Etedali, S. Control of piezoelectric friction dampers in smart base-isolated structures using self-tuning and adaptive fuzzy proportional–derivative controllers. J. Intell. Mater. Syst. Struct. 2017, 28, 1287–1302. [Google Scholar] [CrossRef]
- Li, L.; Ran, X.; Wu, K.; Song, J.; Han, Z. A novel fuzzy logic correctional algorithm for traction control systems on uneven low-friction road conditions. Veh. Syst. Dyn. 2015, 53, 711–733. [Google Scholar] [CrossRef]
- Guo, K.; Pan, Y.; Yu, H. Composite learning robot control with friction compensation: A neural network-based approach. IEEE Trans. Ind. Electron. 2018, 66, 7841–7851. [Google Scholar] [CrossRef]
- Tu, X.; Zhou, Y.; Zhao, P.; Cheng, X. Modeling the static friction in a robot joint by genetically optimized BP neural network. J. Intell. Robot. Syst. 2019, 94, 29–41. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, F.; Ge, S.S.; Wu, Y.; Mei, X. End-effector force estimation for flexible-joint robots with global friction approximation using neural networks. IEEE Trans. Ind. Inform. 2018, 15, 1730–1741. [Google Scholar] [CrossRef]
- Billot, M.; Xu, X.; Agnus, J.; Piat, E.; Stempflé, P. Multi-axis MEMS force sensor for measuring friction components involved in dexterous micromanipulation: Design and optimization. Int. J. Nanomanuf. 2015, 11, 161–184. [Google Scholar] [CrossRef]
- Jung, B.J.; Kim, B.; Koo, J.C.; Choi, H.R.; Moon, H. Joint torque sensor embedded in harmonic drive using order tracking method for robotic application. IEEE/ASME Trans. Mech. 2017, 22, 1594–1599. [Google Scholar] [CrossRef]
- Sim, O.; Oh, J.; Lee, K.K.; Oh, J.H. Collision detection and safe reaction algorithm for non-backdrivable manipulator with single force/torque sensor. J. Intell. Robot. Syst. 2018, 91, 403–412. [Google Scholar] [CrossRef]
- Le Tien, L.; Albu-Schaffer, A.; De Luca, A.; Hirzinger, G. Friction observer and compensation for control of robots with joint torque measurement. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, 22–26 September 2008; pp. 3789–3795. [Google Scholar]
- Eom, M.; Chwa, D. Robust swing-up and balancing control using a nonlinear disturbance observer for the pendubot system with dynamic friction. IEEE Trans. Robot. 2015, 31, 331–343. [Google Scholar] [CrossRef]
- Le, L.T. Passive Friction Compensation Using a Nonlinear Disturbance Observer for Flexible Joint Robots with Joint Torque Measurements. J. Comput. Sci. Cybern. 2019, 35, 85–103. [Google Scholar] [CrossRef]
- Haddadin, S.; De Luca, A.; Albu-Schäffer, A. Robot collisions: A survey on detection, isolation, and identification. IEEE Trans. Robot. 2017, 33, 1292–1312. [Google Scholar] [CrossRef]
- Lee, S.D.; Song, J.B. Sensorless collision detection based on friction model for a robot manipulator. Int. J. Precis. Eng. Manuf. 2016, 17, 11–17. [Google Scholar] [CrossRef]
- He, S.; Ye, J.; Li, Z.; Li, S.; Wu, G.; Wu, H. A momentum-based collision detection algorithm for industrial robots. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 1253–1259. [Google Scholar]
- Ruderman, M.; Iwasaki, M. Sensorless torsion control of elastic-joint robots with hysteresis and friction. IEEE Trans. Ind. Electron. 2015, 63, 1889–1899. [Google Scholar] [CrossRef]
- Craig, J.J. Introduction to Robotics: Mechanics and Control, 3rd ed.; Pearson Education: India, NJ, USA, 2009; ISBN 0-13-123629-6. [Google Scholar]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics: Modelling, Planning and Control; Springer Science & Business Media: New York, NY, USA, 2010; ISBN 978-1-84628-641-4. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kμ | RMSE of Joint 1 [N·m] 1 | RMSE of Joint 2 [N·m] |
|---|---|---|
| Kμ = [10; 5] T | 1.23 | 0.57 |
| Kμ = [360, 260] T | 0.25 | 0.09 |
| Kμ = [800, 750] T | 0.40 | 0.13 |
| Friction Compensation | RMSE of Position [rad] | RMSE of Velocity [rad/s] |
|---|---|---|
| No compensation | 3.3 × 10−2 | 4.5 × 10−2 |
| With compensation | 1.7 × 10−2 | 2.2 × 10−2 |
| Improvement | 48.5% | 51.1% |
| Parameters | Values |
|---|---|
| Torque constant | 2.76 × 10−2 N·m/A |
| Rotor inertia | 3.33 × 10−6 kg·m2 |
| Gearbox equivalent inertia | 9.4 × 10−7 kg·m2 |
| Gearbox radio | 81 |
| Kμ | Low-Velocity Step Response Time [s] | High-Velocity Step Response Time [s] |
|---|---|---|
| No compensation | 0.051 | 0.051 |
| Kμ = 10 | 0.043 | 0.051 |
| Kμ = 50 | 0.041 | 0.048 |
| Kμ = 100 | 0.045 | 0.050 |
| Errors | No Compensation | Compensation with Kμ = 50 | Performance Improvement |
|---|---|---|---|
| RMSE_SPeLv[rad] | 0.982 | 0.981 | 0.1% |
| RMSE_SVeLv[rad/s] | 4.207 | 2.813 | 33.1% |
| RMSE_SPeHv[rad] | 3.685 | 3.650 | 1.0% |
| RMSE_SVeHv[rad/s] | 19.823 | 20.068 | −1.2% |
| Errors | RMSE_SPeLv [rad] | RMSE_SVeLv [rad/s] | RMSE_SPeHv [rad] | RMSE_SVeHv [rad/s] |
|---|---|---|---|---|
| No compensation | 1.156 | 1.562 | 3.776 | 5.981 |
| Kμ = 50 | 1.154 | 1.409 | 3.774 | 6.161 |
| Performance improvement | 0.2% | 9.8% | 0.1% | −3.0% |
| Coulomb and viscous | 1.154 | 1.446 | 3.760 | 6.447 |
| Performance improvement | 0.2% | 7.4% | 0.4% | −7.8% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, T.; Fan, J.; Fang, Q.; Wang, S.; Zhu, Y.; Zhao, J. A Novel Virtual Sensor for Estimating Robot Joint Total Friction Based on Total Momentum. Appl. Sci. 2019, 9, 3344. https://doi.org/10.3390/app9163344
Xu T, Fan J, Fang Q, Wang S, Zhu Y, Zhao J. A Novel Virtual Sensor for Estimating Robot Joint Total Friction Based on Total Momentum. Applied Sciences. 2019; 9(16):3344. https://doi.org/10.3390/app9163344
Chicago/Turabian StyleXu, Tian, Jizhuang Fan, Qianqian Fang, Shoulong Wang, Yanhe Zhu, and Jie Zhao. 2019. "A Novel Virtual Sensor for Estimating Robot Joint Total Friction Based on Total Momentum" Applied Sciences 9, no. 16: 3344. https://doi.org/10.3390/app9163344
APA StyleXu, T., Fan, J., Fang, Q., Wang, S., Zhu, Y., & Zhao, J. (2019). A Novel Virtual Sensor for Estimating Robot Joint Total Friction Based on Total Momentum. Applied Sciences, 9(16), 3344. https://doi.org/10.3390/app9163344