Research on Composite Control Strategy of Quasi-Z-Source DC–DC Converter for Fuel Cell Vehicles




Abstract
:1. Introduction
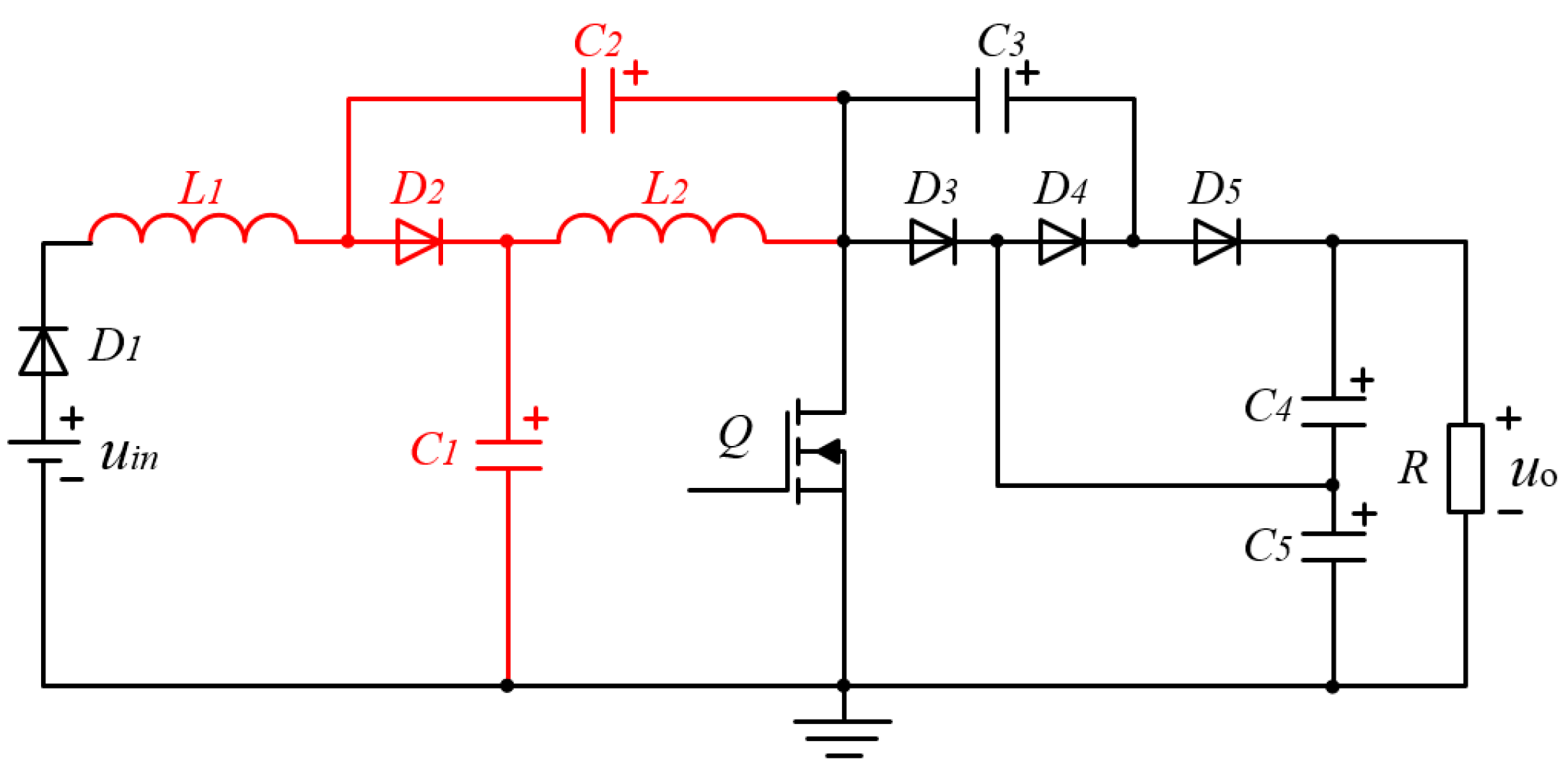
2. Topology Operation Principle Analysis and Dynamic Modeling
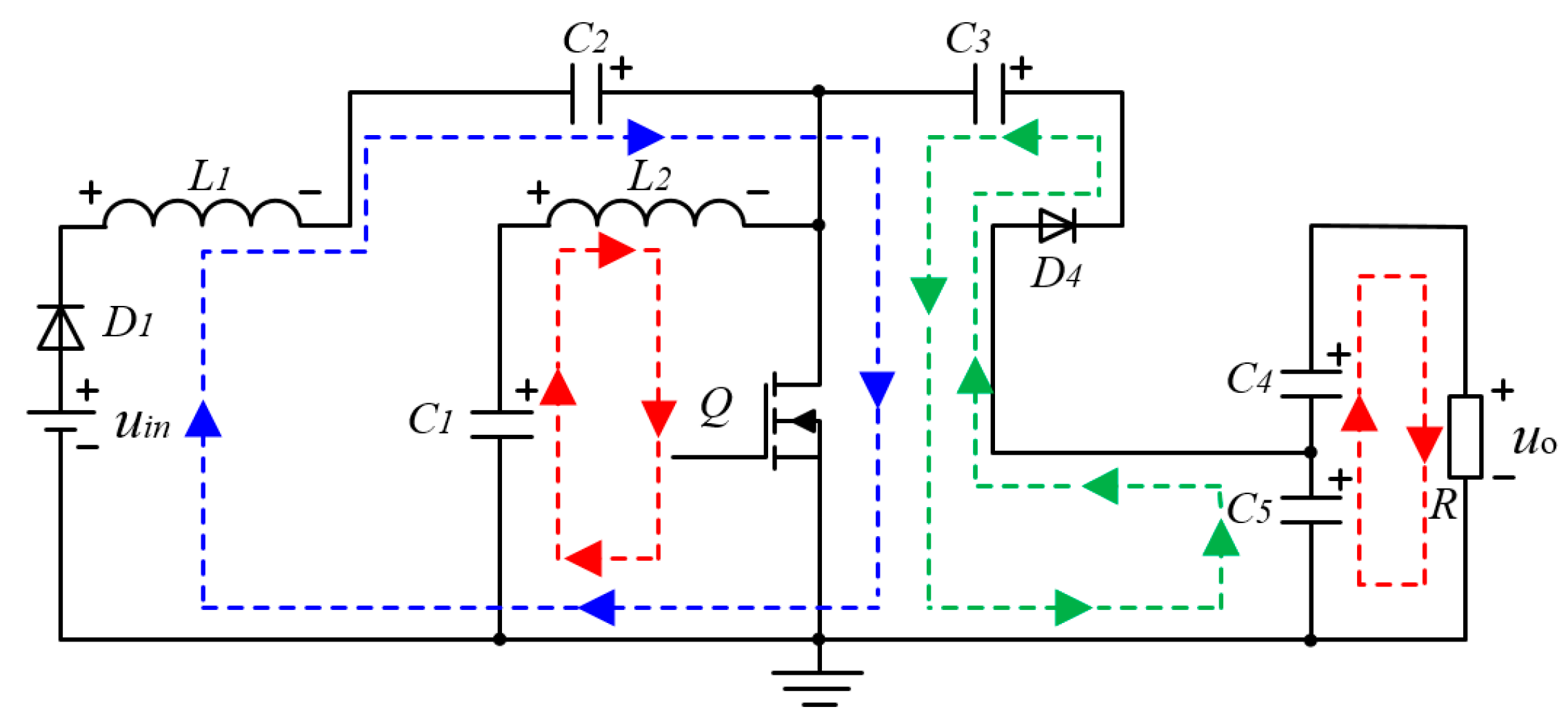
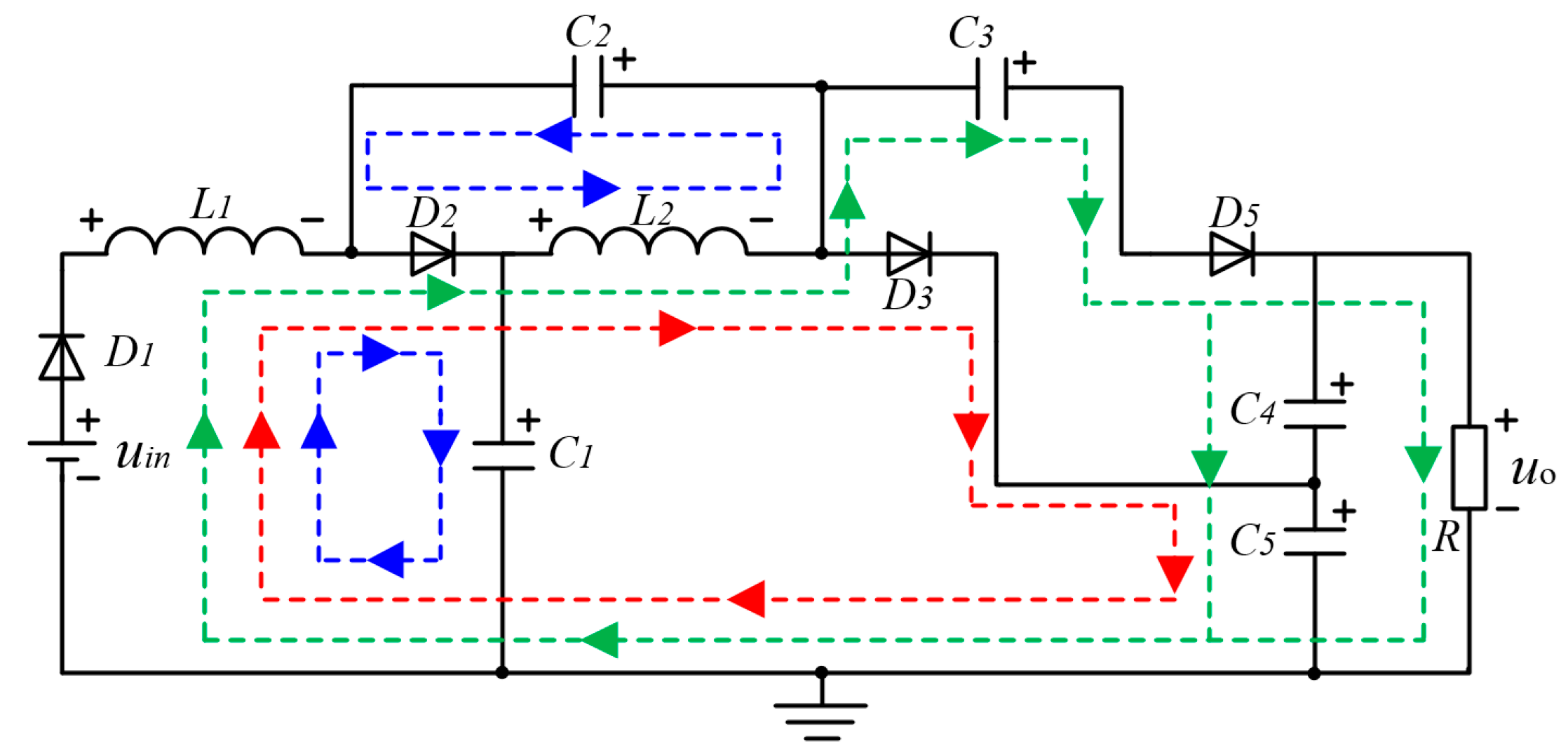
2.1. Topology Operation Principle Analysis
2.2. Dynamic Modeling
3. Component Parameters and Controller Design
3.1. Component Parameters Design
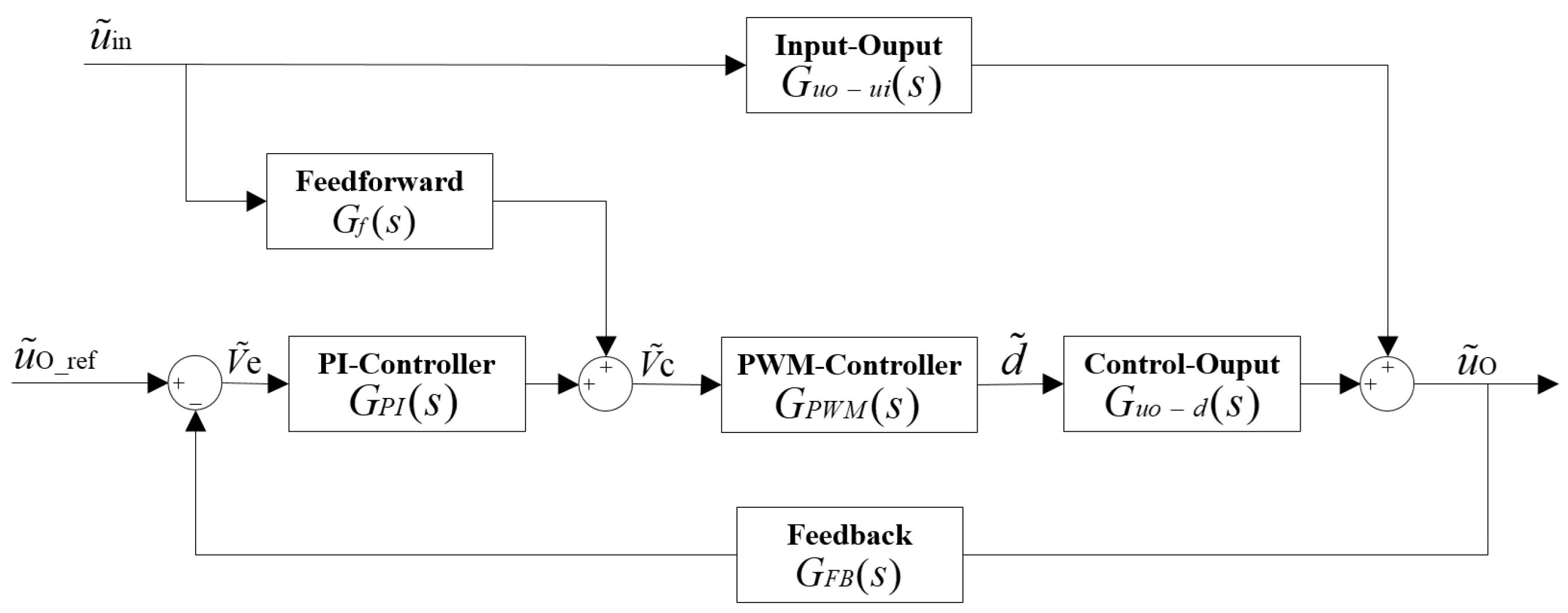
3.2. Feedforward Compensation Network and Feedback Control Design
4. Simulation and Experimental Results
4.1. Simulation Results
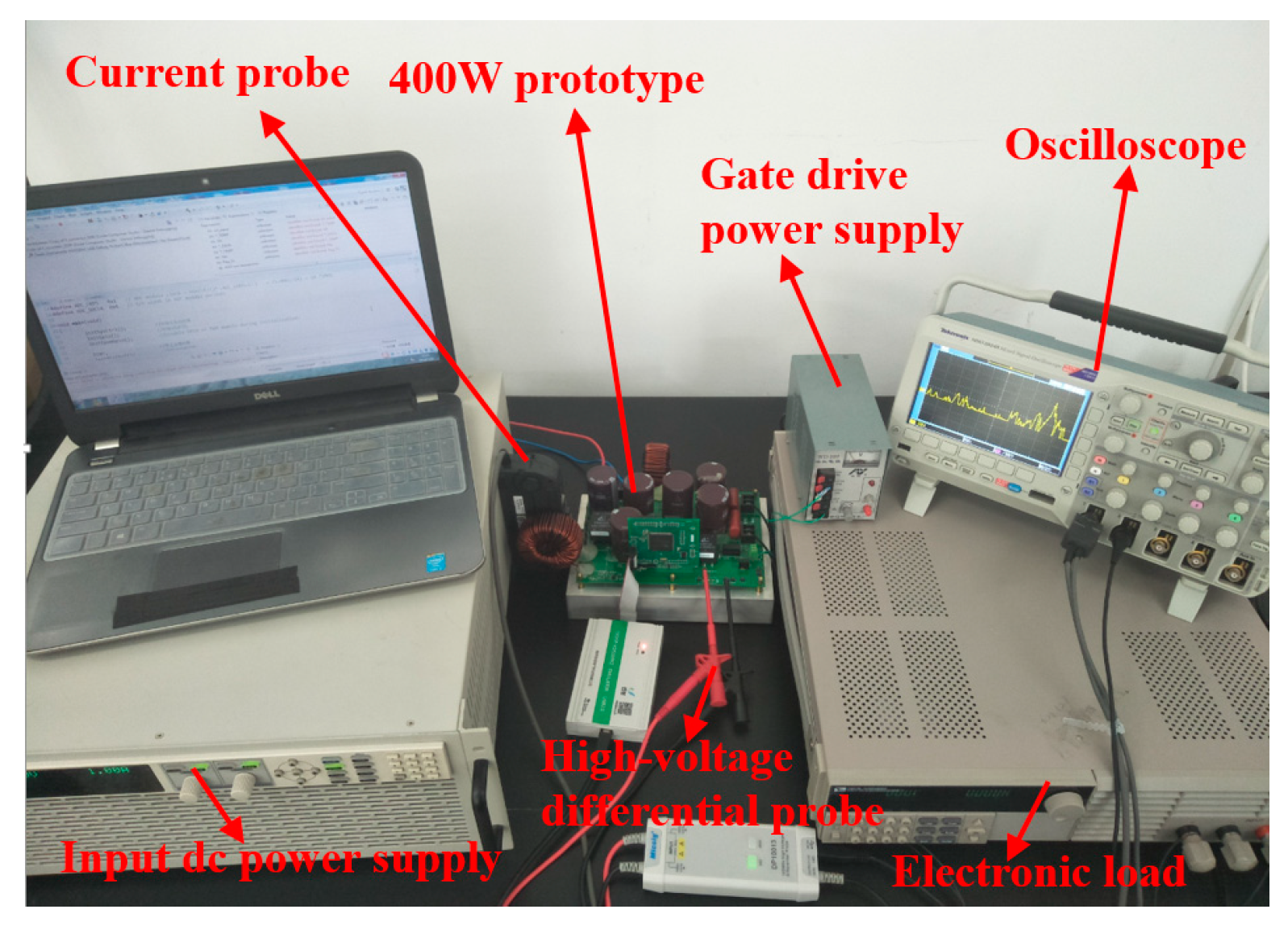
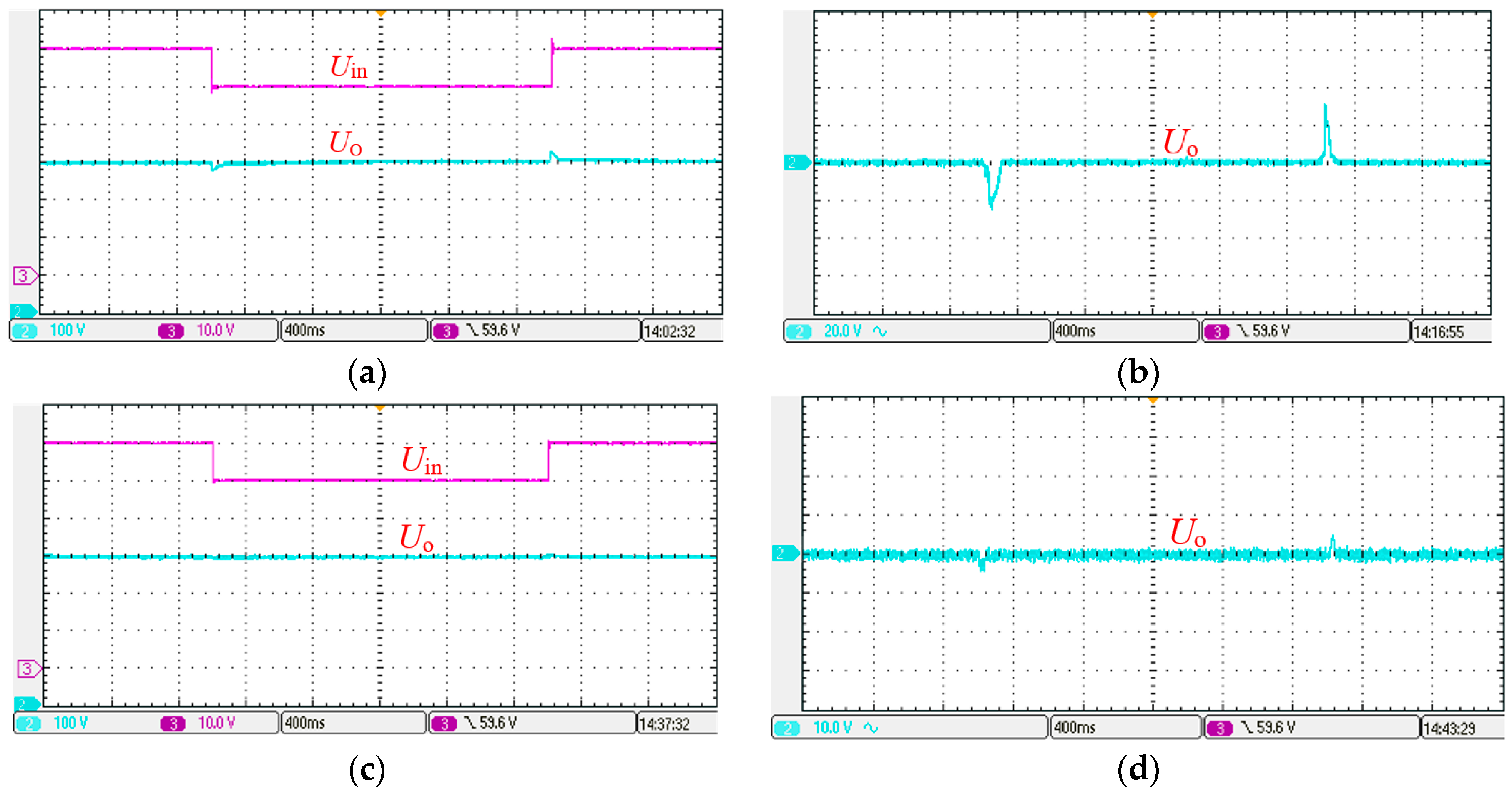
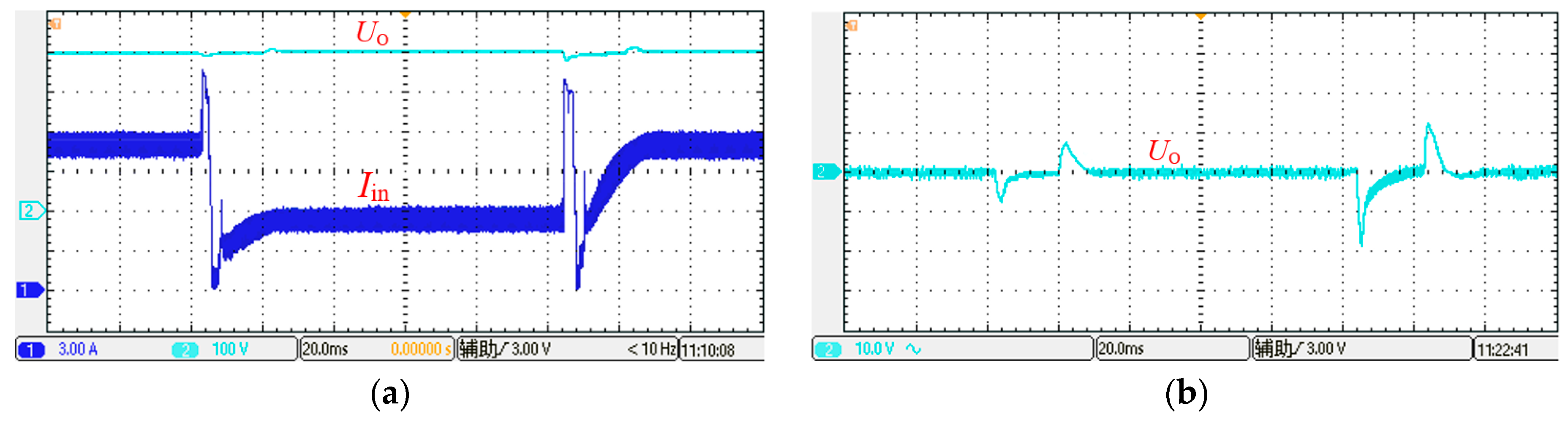
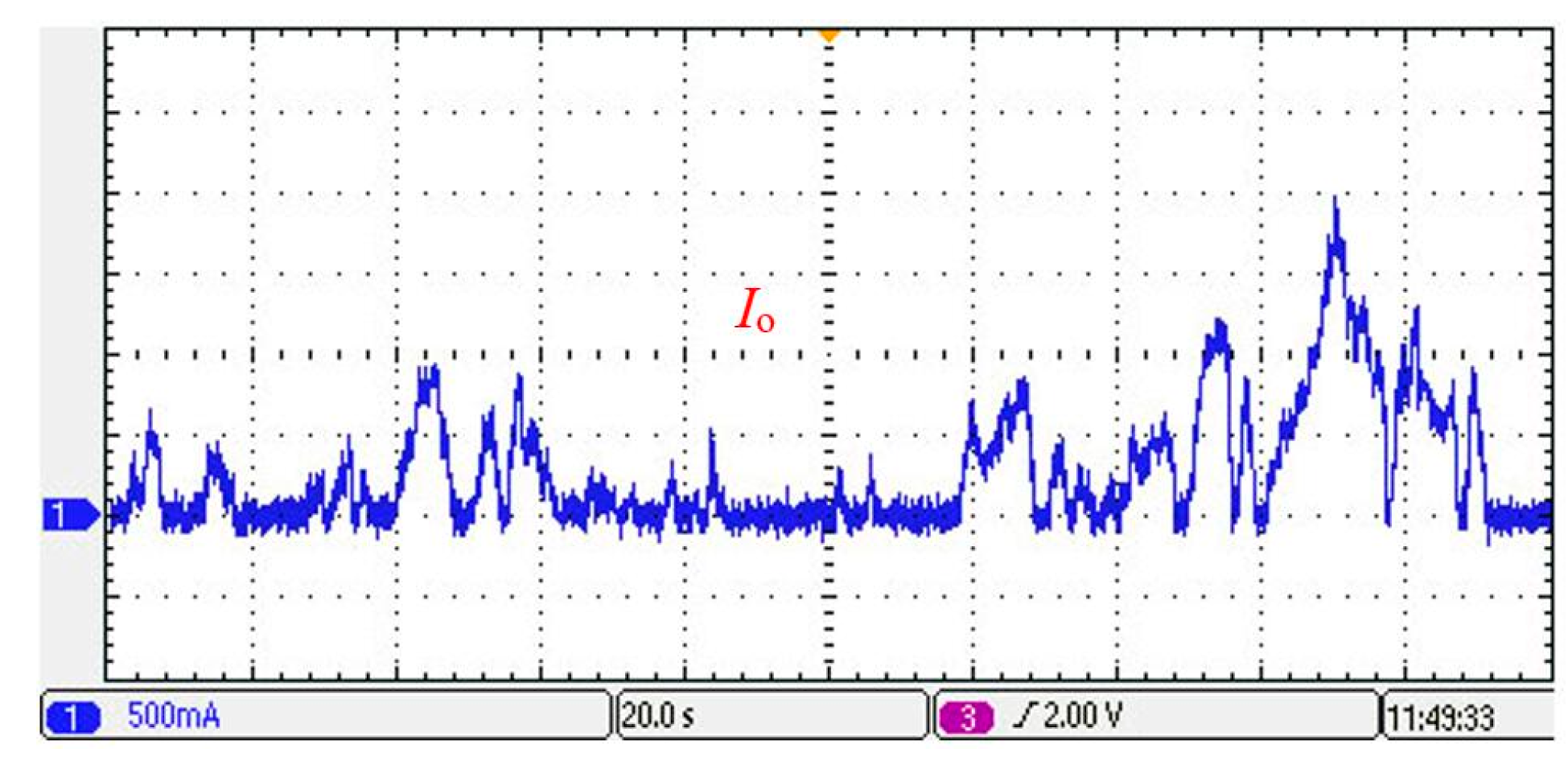
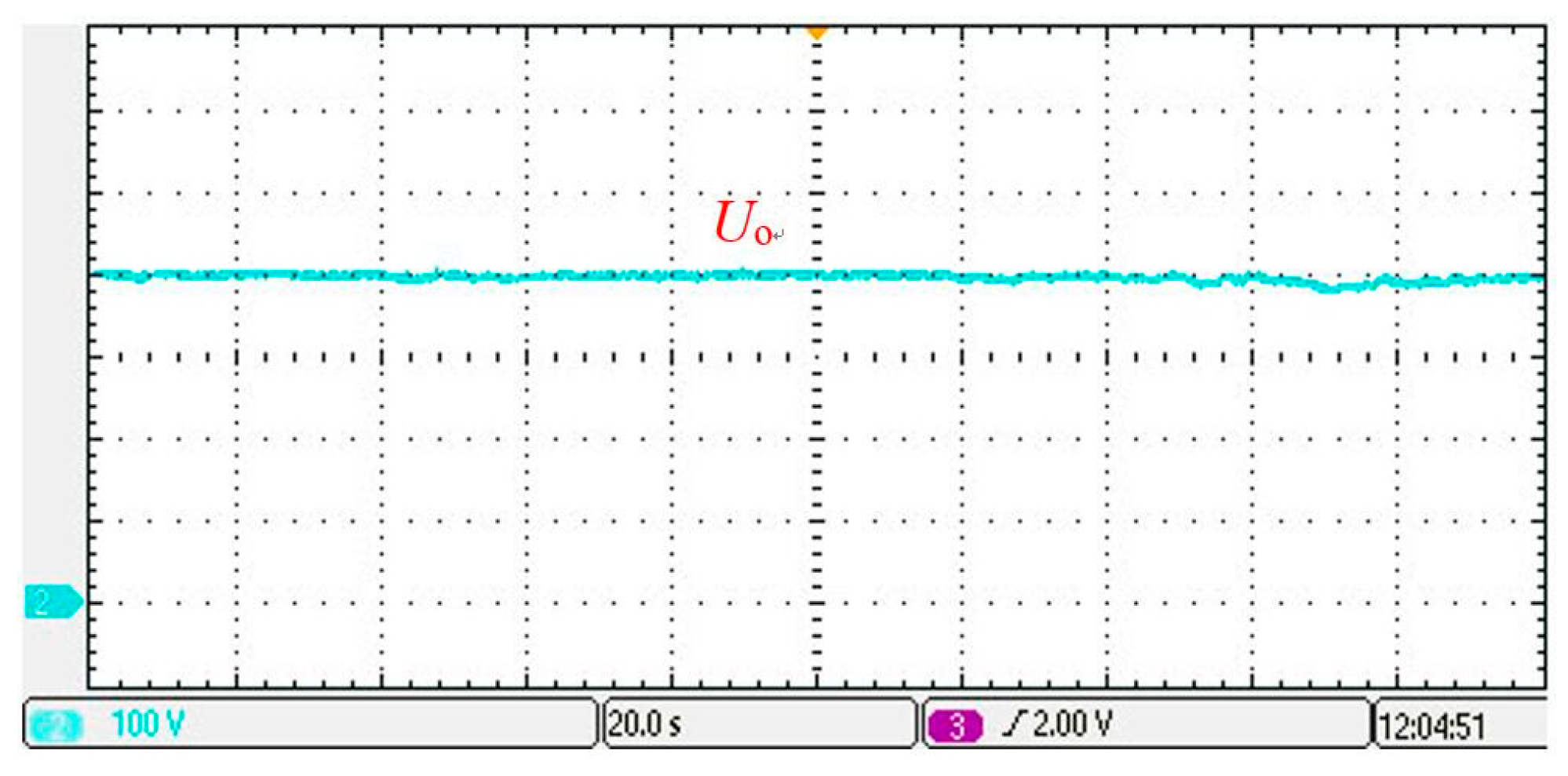
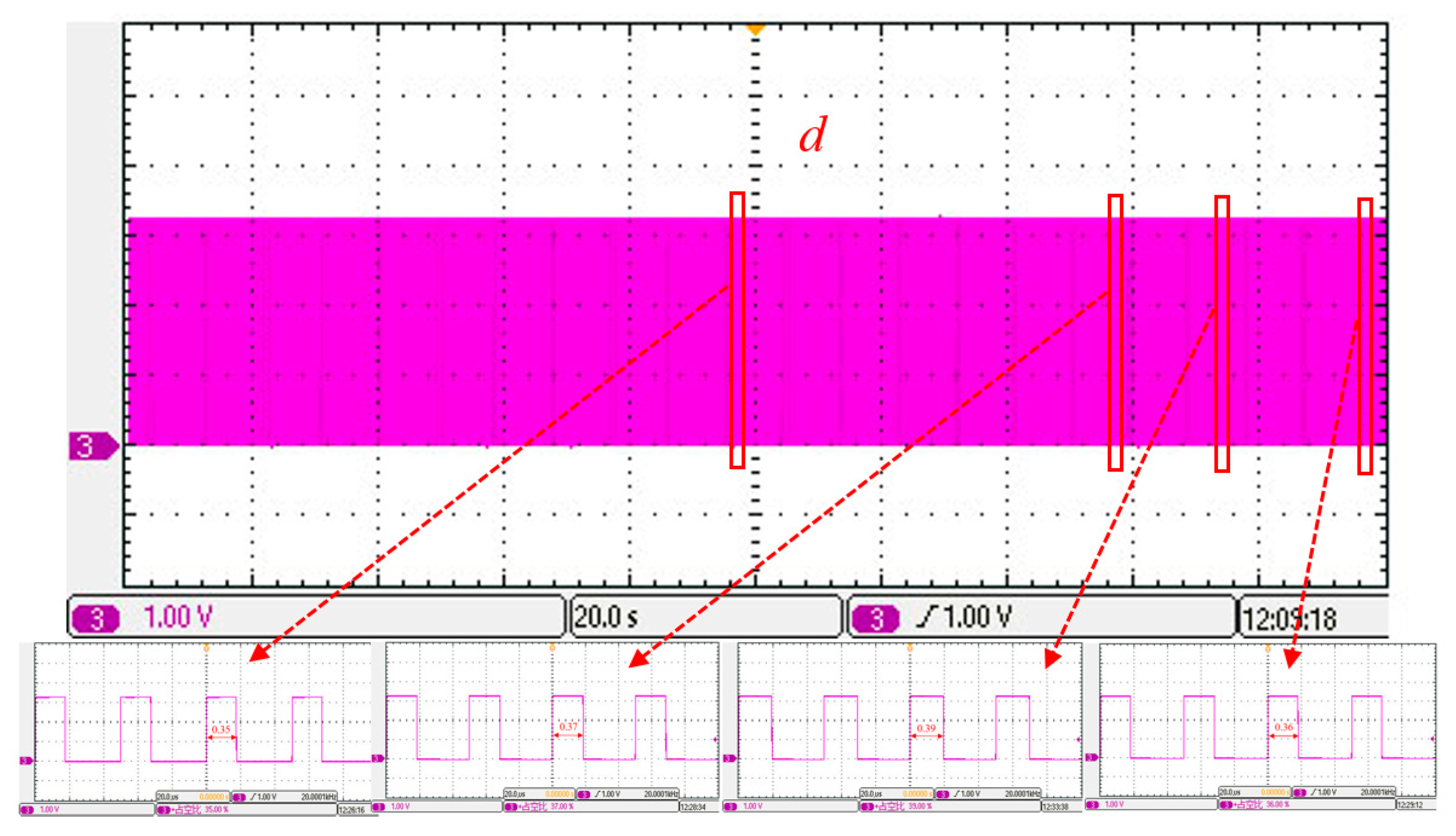
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Derbeli, M.; Barambones, O.; Sbita, L. A Robust Maximum Power Point Tracking Control Method for a PEM Fuel Cell Power System. Appl. Sci. 2018, 8, 2449. [Google Scholar] [CrossRef]
- Tanc, B.; Arat, H.T.; Baltacıoğlu, E.; Aydın, K. Overview of the next quarter century vision of hydrogen fuel cell electric vehicles. Int. J. Hydrogen Energy 2019, 44, 10120–10128. [Google Scholar] [CrossRef]
- Prasanna, U.R.; Pan, X.; Rathore, A.K.; Rajashekara, K. Propulsion system architecture and power conditioning topologies for fuel cell vehicles. IEEE Trans. Ind. Appl. 2015, 51, 640–650. [Google Scholar] [CrossRef]
- Wang, P.; Zhou, L.; Zhang, Y.; Li, J.; Sumner, M. Input-Parallel Output-Series DC–DC Boost Converter with a Wide Input Voltage Range, For Fuel Cell Vehicles. IEEE Trans. Veh. Technol. 2017, 66, 7771–7781. [Google Scholar] [CrossRef]
- Zhu, B.; Zeng, Q.; Vilathgamuwa, D.M.; Li, Y.; She, X. Non-isolated high-voltage gain dual-input DC/DC converter with a ZVT auxiliary circuit. IET Power Electron. 2018, 12, 861–868. [Google Scholar] [CrossRef]
- Slah, F.; Mansour, A.; Abdelkarim, A.; Bacha, F. Analysis and Design of an LC Parallel-Resonant DC/DC Converter for a Fuel Cell Used in an Electrical Vehicle. J. Circuits Syst. Comput. 2018, 27, 1850–1862. [Google Scholar] [CrossRef]
- Jia, J.; Wang, G.; Cham, Y.T.; Wang, Y.; Han, M. Electrical characteristic study of a hybrid PEMFC and ultracapacitor system. IEEE Trans. Ind. Electron. 2010, 57, 1945–1953. [Google Scholar]
- Bi, H.; Wang, P.; Che, Y. A Capacitor Clamped H-type Boost DC–DC Converter with Wide Voltage-Gain Range for Fuel Cell Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 276–290. [Google Scholar] [CrossRef]
- Nguyen, D.A.; Chiu, H.J.; Lin, J.Y.; Hsieh, Y.C.; Chen, H.T.; Zeng, B.X. Novel Modulation of Three-Phase Isolated Bidirectional Wye-Delta Conventer for Energy Storage System. IEEE Trans. Power Electron. 2018, 34, 1266–1275. [Google Scholar]
- Wang, C.M. A novel ZCS-PWM flyback converter with a simple ZCS PWM commutation cell. IEEE Trans. Ind. Electron. 2008, 55, 749–757. [Google Scholar] [CrossRef]
- Prudente, M.; Pfitscher, L.L.; Emmendoerfer, G.; Romaneli, E.F.; Gules, R. Voltage multiplier cells applied to non-isolated converters. IEEE Trans. Power Electron. 2008, 23, 871–887. [Google Scholar] [CrossRef]
- Salvador, M.A.; Lazzarin, T.B.; Coelho, R.F. High Step-Up DC–DC Converter with Active Switched-Inductor and Passive Switched-Capacitor Networks. IEEE Trans. Ind. Electron. 2018, 65, 5644–5654. [Google Scholar] [CrossRef]
- Leyva-Ramos, J.; Diaz-Saldierna, L.H.; Morales-Saldaña, J.A.; Ortiz-Lopez, M.G. Switching regulator using a quadratic boost converter for wide DC conversion ratios. IET Power Electron. 2009, 2, 605–613. [Google Scholar] [CrossRef]
- Axelrod, B.; Berkovich, Y.; Ioinovici, A. Switched-Capacitor/Switched-Inductor Structures for Getting Transformerless Hybrid DC–DC PWM Converters. IEEE Trans. Circuits Syst. I Regul. Pap. 2008, 55, 687–696. [Google Scholar] [CrossRef]
- Nguyen, M.-K.; Duong, T.-D.; Lim, Y.C. Switched-Capacitor-Based Dual-Switch High-Boost DC–DC Converter. IEEE Trans. Ind. Electron. 2018, 33, 4181–4189. [Google Scholar] [CrossRef]
- Axelrod, B.; Berkovich, Y.; Ioinovici, A. Transformerless DC–DC converters with a very high DC line-to-load voltage ratio. J. Circuits Syst. Comput. 2004, 13, 467–475. [Google Scholar] [CrossRef]
- Prasana, R.J.K.; Amprasath, S.; Vijayasarathi, N. Design and analysis of hybrid DC–DC boost converter in continuous conduction mode. In Proceedings of the IEEE International Conference on Circuit, Power and Computing Technologies, Anyakumari, India, 18–19 March 2016. [Google Scholar]
- Jin, K.; Ruan, X.B.; Yang, M.; Xu, M. A Hybrid Fuel Cell Power System. IEEE Trans. Ind. Electron. 2009, 56, 1212–1222. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, J.; Wang, Y. Hybrid boost three-level DC–DC converter with high voltage gain for photovoltaic generation systems. IEEE Trans. Power Electron. 2013, 28, 3659–3664. [Google Scholar] [CrossRef]
- Reed, J.K.; Venkataramanan, G. Bidirectional high conversion ratio DC–DC converter. In Proceedings of the IEEE Power and Energy Conference, Champaign, IL, USA, 24–25 February 2012. [Google Scholar]
- Sun, L.; Zhuo, F.; Wang, F.; Zhu, T. A novel topology of high voltage and high power bidirectional ZCS DC–DC converter based on serial capacitors. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Long Beach, CA, USA, 20–24 March 2016. [Google Scholar]
- Zhang, C.; Shao, Z. Robust feedforward compensation scheme with AC booster for high frequency low voltage buck DC–DC converters. Analog Integr. Circuits Signal Process. 2011, 70, 391–404. [Google Scholar] [CrossRef]
- Bao, Y.; Wang, L.Y.; Wang, C.; Jiang, J.; Jiang, C.; Duan, C. Adaptive Feedforward Compensation for Voltage Source Disturbance Rejection in DC–DC Converters. IEEE Trans. Control Syst. Technol. 2018, 26, 344–351. [Google Scholar] [CrossRef]
- Sato, K.; Sato, T.; Sonehara, M. Transient response improvement of digitally controlled DC–DC converter with feedforward compensation. In Proceedings of the IEEE International Telecommunications Energy Conference, Gold Coast, Australia, 22–26 October 2017. [Google Scholar]
- Zhang, Y.; Fu, C.Z.; Sumner, M.; Wang, P. A Wide Input-Voltage Range Quasi-Z-Source Boost DC–DC Converter with High-Voltage Gain for Fuel Cell Vehicles. IEEE Trans. Ind. Electron. 2018, 65, 5201–5212. [Google Scholar] [CrossRef]
- Yu, B.; Yang, J.; Wang, D.; Shi, J.; Chen, J. Energy consumption and increased EV range evaluation through heat pump scenarios and low GWP refrigerants in the new test procedure WLTP. Int. J. Refrig. 2019, 100, 284–294. [Google Scholar] [CrossRef]
- Massaguer, E.; Massaguer, A.; Pujol, T.; Comamala, M.; Montoro, L.; Gonzalez, J.R. Fuel economy analysis under a WLTP cycle on a mid-size vehicle equipped with a thermoelectric energy recovery system. Energy 2019, 179, 306–314. [Google Scholar] [CrossRef]
- Slah, F.; Mansour, A.; Hajer, M.; Faouzi, B. Analysis, modeling and implementation of an interleaved boost DC–DC converter for fuel cell used in electric vehicle. Int. J. Hydrogen Energy 2017, 42, 28852–28864. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Units |
|---|---|---|
| Rated Power P | 400 | W |
| Input voltage uin | 40~120 | V |
| Output voltage uO | 400 | V |
| Load resistance R | 400 | Ω |
| Switching frequency f | 20 | kHz |
| Parameters | Values | Units |
|---|---|---|
| Inductors L1, L2 | 800 | uH |
| Capacitors C1, C2, C3, C4, C5 | 680 | uF |
| Parameters | Values | Units |
|---|---|---|
| Output power PFC | 1200 | W |
| Maximum output voltage VFC | 58 | V |
| Maximum output current IL | 20 | A |
| Maximum temperature T_max | 373 | K |
| Initial temperature T_initial | 307 | K |
| Partial pressure of hydrogen PH2 | 1.5 | atm |
| Partial pressure of oxygen PO2 | 1 | atm |
| Partial pressure of water PHO2 | 1 | atm |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, M.; Yang, M.; Wu, X.; Fu, J. Research on Composite Control Strategy of Quasi-Z-Source DC–DC Converter for Fuel Cell Vehicles. Appl. Sci. 2019, 9, 3309. https://doi.org/10.3390/app9163309
Zhou M, Yang M, Wu X, Fu J. Research on Composite Control Strategy of Quasi-Z-Source DC–DC Converter for Fuel Cell Vehicles. Applied Sciences. 2019; 9(16):3309. https://doi.org/10.3390/app9163309
Chicago/Turabian StyleZhou, Meilan, Mingliang Yang, Xiaogang Wu, and Jun Fu. 2019. "Research on Composite Control Strategy of Quasi-Z-Source DC–DC Converter for Fuel Cell Vehicles" Applied Sciences 9, no. 16: 3309. https://doi.org/10.3390/app9163309
APA StyleZhou, M., Yang, M., Wu, X., & Fu, J. (2019). Research on Composite Control Strategy of Quasi-Z-Source DC–DC Converter for Fuel Cell Vehicles. Applied Sciences, 9(16), 3309. https://doi.org/10.3390/app9163309