A Low Overhead Mapping Scheme for Exploration and Representation in the Unknown Area

Abstract
1. Introduction
2. A New Mapping Scheme of Rmap
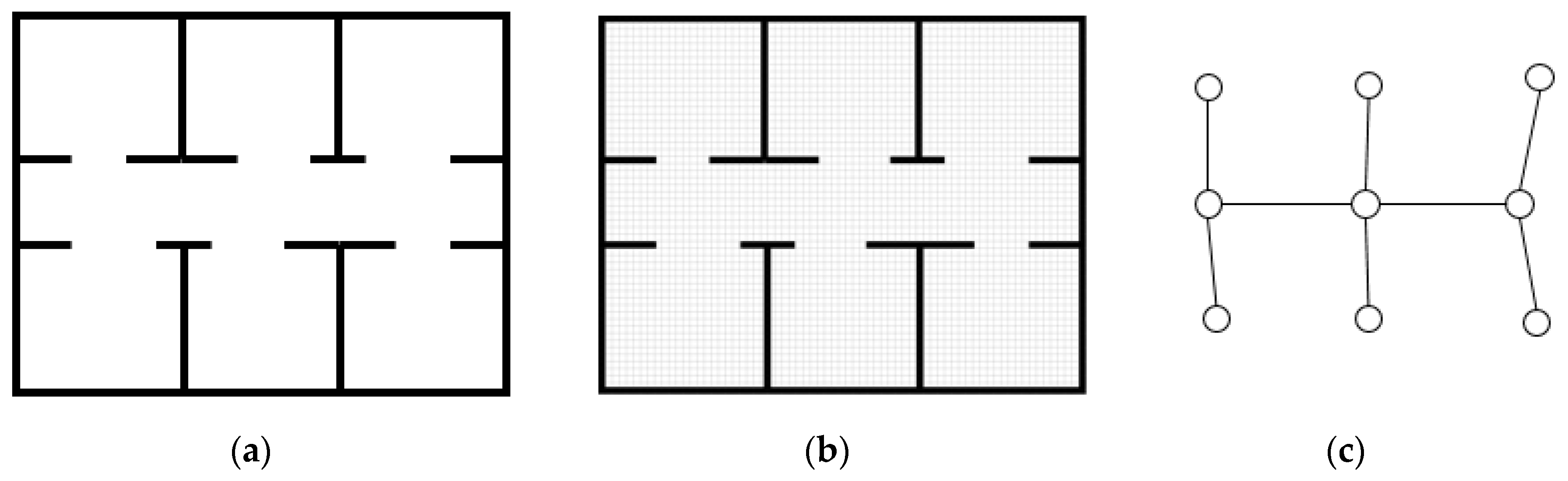
2.1. The Framework of Rmap
| Algorithm 1. Rmap Algorithm | |
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 | Begin Let R = {r1, r2, …, rn} is a set of rectangles Let E = {e1, e2, …, en} is a set of edges of adjacent rectangles Let Map=<R,E> be a map generated by Rmap algorithm Let MBR be the Minimum Bounding Rectangle with robot rotation If there is no new sensed data outside MBR area Goto line 11 R1 Selection step Else Goto line 9 MBR Creation step End If EndOfLoop End |
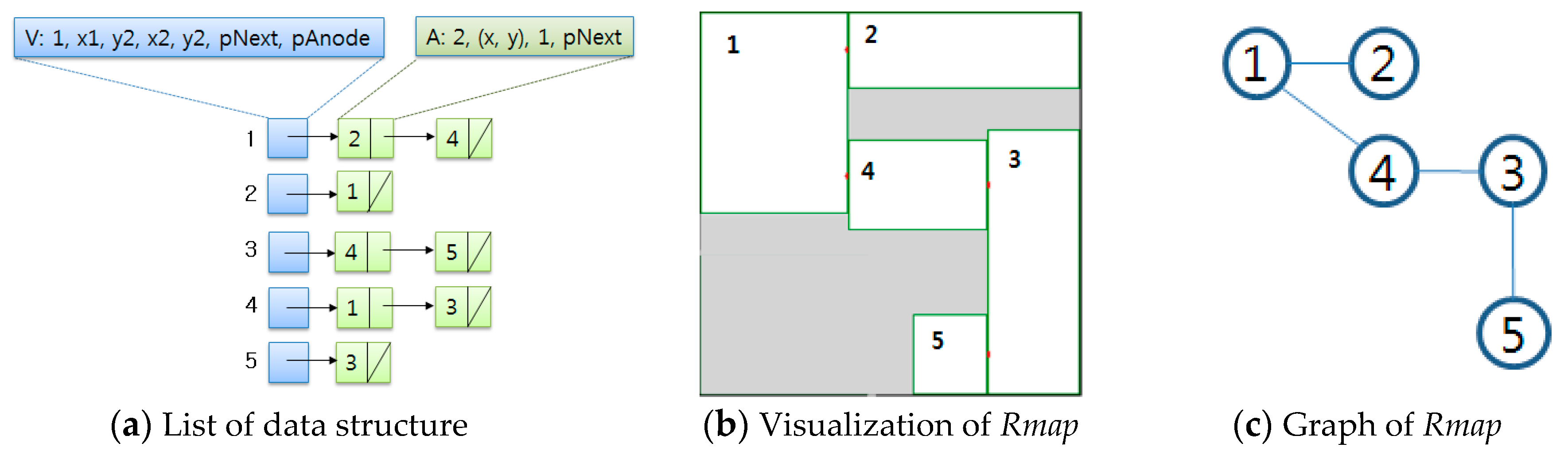
2.2. Data Structure of Rmap
2.3. Path Planning Scheme Using Rmap
2.4. Applied Usage Case of Rmap for Coverage
| Algorithm 2. Modified Rmap Algorithm for Coverage | |
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 | Begin Let R = {r1, r2, …, rn} is a set of rectangles Let E = {e1, e2, …, en} is a set of edges of adjacent rectangles Let Map=<R,E> be a map generated by Rmap algorithm Let MBR be the Minimum Bounding Rectangle with robot rotation If there is no new sensed data outside MBR area Goto line 11 R1 Selection step Else Goto line 9 MBR Creation step End If EndOfLoop End |
3. Experiments
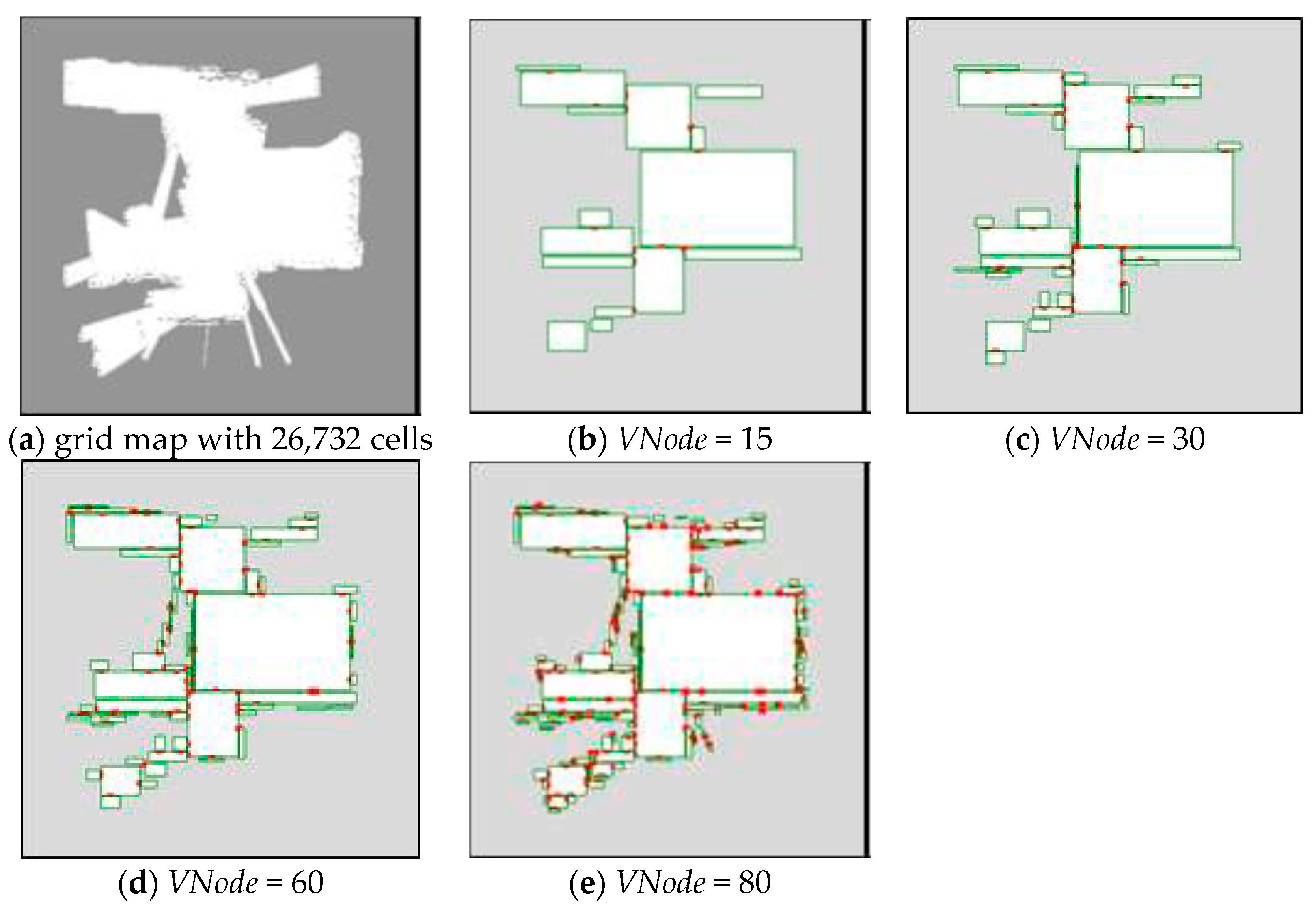
3.1. Experiment Environments
3.2. The Memory Efficiency of Rmap
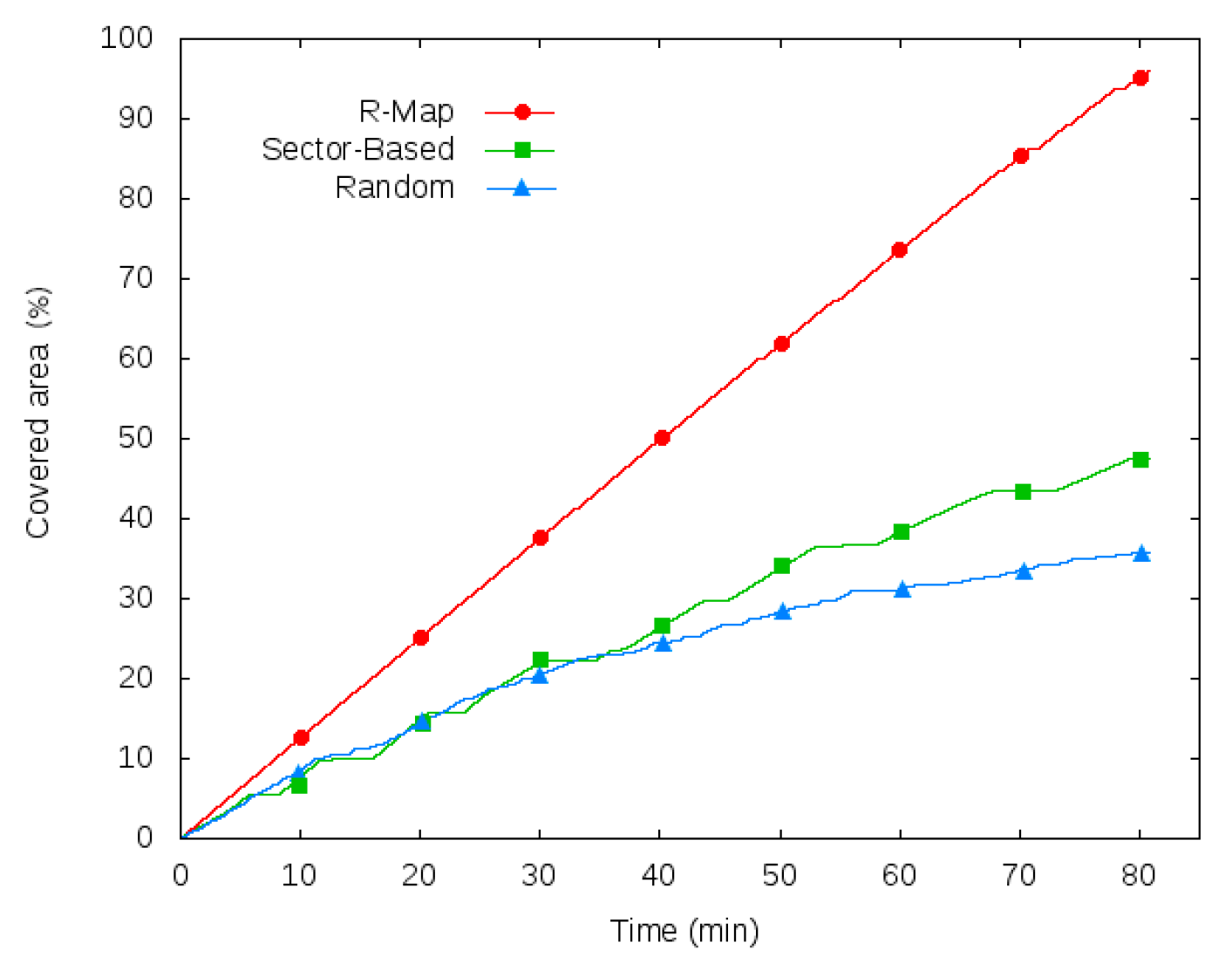
3.3. The Coverage Performance Rmap
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, present and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Esparza-Jiménez, J.; Devy, M.; Gordillo, J. Visual ekf-slam from heterogeneous landmarks. Sensors 2016, 16, 489. [Google Scholar] [CrossRef] [PubMed]
- Sualeh, M.; Kim, G.W. Simultaneous Localization and Mapping in the Epoch of Semantics: A Survey. Int. J. Control. Autom. Syst. 2019, 17, 729–742. [Google Scholar] [CrossRef]
- Montemerlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. FastSLAM 2.0: An improved particle filtering algorithm for simultaneous localization and mapping that provably converges. In Proceedings of the 18th International Joint Conference on Artificial Intelligence, Acapulco, Mexico, 9–15 August 2003; pp. 1151–1156. [Google Scholar]
- Lin, M.; Yang, C.; Li, D. An Improved transformed unscented FastSLAM with adaptive genetic resampling. IEEE Trans. Ind. Electron. 2019, 66, 3583–3594. [Google Scholar] [CrossRef]
- Eliazar, A.I.; Parr, R. DP-SLAM 2.0. IEEE Int. Conf. Robot. Autom. Proc. ICRA04 2004, 2, 1314–1320. [Google Scholar]
- Choi, J. Hybrid map-based SLAM using a Velodyne laser scanner. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 3082–3087. [Google Scholar]
- Yu, N.; Zhang, B. An Improved Hector SLAM Algorithm based on Information Fusion for Mobile Robot. In Proceedings of the 2018 5th IEEE International Conference on Cloud Computing and Intelligence Systems (CCIS), Nanjing, China, 23–25 November 2018; pp. 279–284. [Google Scholar]
- Lee, H.; Chun, J.; Jeon, K.; Lee, H. Efficient EKF-SLAM Algorithm Based on Measurement Clustering and Real Data Simulations. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar]
- Kostavelis, I.; Gasteratos, A. Semantic mapping for mobile robotics tasks: A survey. Robot. Auton. Syst. 2015, 66, 86–103. [Google Scholar] [CrossRef]
- Carvalho, D.; García-Martínez, N.A.; Lado, J.L.; Fernández-Rossier, J. Real-space mapping of topological invariants using artificial neural networks. Phys. Rev. B 2018, 97, 115453. [Google Scholar] [CrossRef]
- Luo, R.C.; Shih, W. Topological Map Generation for Intrinsic Visual Navigation of an Intelligent Service Robot. In Proceedings of the 2019 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–13 January 2019; pp. 1–6. [Google Scholar]
- Buschka, P.; Saffiotti, A. Some notes on the use of hybrid maps for mobile robots. In Proceedings of the 8th International Conference on Intelligent Autonomous Systems, Amsterdam, The Netherland, 10–13 March 2004; pp. 547–556. [Google Scholar]
- Cai, C.; Ferrari, S. Information-driven sensor path planning by approximate cell decomposition. IEEE Trans. Syst. Man Cybern. Part B (Cybernetics) 2009, 39, 672–689. [Google Scholar]
- Tutte, W.T. Squaring the square. Can. J. Math. 1950, 2, 197–209. [Google Scholar] [CrossRef]
- Moshkovitz, D. The projection games conjecture and the NP-hardness of ln n-approximating set-cover. Theory Comput. 2015, 11, 221–235. [Google Scholar] [CrossRef]
- Karp, R.M. Reducibility among combinatorial problems. In Complexity of Computer Computations; Springer: Boston, MA, USA, 1972; pp. 85–103. [Google Scholar]
- Cormen, T.H. Section 24.3: Dijkstra’s algorithm. In Introduction to Algorithms; MIT Press: Cambridge, MA, USA, 2001; pp. 595–601. [Google Scholar]
- Bormann, R.; Jordan, F.; Hampp, J.; Hägele, M. Indoor Coverage Path Planning: Survey, Implementation, Analysis. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Piscataway, NJ, USA, 21–25 May 2018; pp. 1718–1725. [Google Scholar]
- Huang, L.; Xu, Y.; Zhao, H.A. Multi-objective Optimization Model for Determining the Optimal Standard Feasible Neighborhood of Intelligent Vehicles. In Proceedings of the 15th Pacific Rim International Conference on Artificial Intelligence, Nanjing, China, 28–31 August 2018; Springer: New York, NY, USA, 2018; pp. 268–281. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Results | (a) | (b) | (c) | (d) |
|---|---|---|---|---|
| The number of rectangles (n) | 19 | 50 | 113 | 522 |
| The size of the minimum rectangle (m2) | 1.015 | 0.25 | 0.05 | 0.01 |
| The number of ACP | 23 | 78 | 136 | 477 |
| Similarity compared to the grid map (%) | 92 | 95 | 97 | 99 |
| Elapse Time (sec) performed in 2 Ghz CPU | 0.875 | 1.063 | 1.375 | 3.281 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, C.W.; Lee, J.D.; Ahn, J.; Oh, H.J.; Park, J.K.; Jeon, H.S. A Low Overhead Mapping Scheme for Exploration and Representation in the Unknown Area. Appl. Sci. 2019, 9, 3089. https://doi.org/10.3390/app9153089
Lee CW, Lee JD, Ahn J, Oh HJ, Park JK, Jeon HS. A Low Overhead Mapping Scheme for Exploration and Representation in the Unknown Area. Applied Sciences. 2019; 9(15):3089. https://doi.org/10.3390/app9153089
Chicago/Turabian StyleLee, Cheol Won, Jun Dong Lee, Junho Ahn, Hyung Jun Oh, Jung Kyu Park, and Heung Seok Jeon. 2019. "A Low Overhead Mapping Scheme for Exploration and Representation in the Unknown Area" Applied Sciences 9, no. 15: 3089. https://doi.org/10.3390/app9153089
APA StyleLee, C. W., Lee, J. D., Ahn, J., Oh, H. J., Park, J. K., & Jeon, H. S. (2019). A Low Overhead Mapping Scheme for Exploration and Representation in the Unknown Area. Applied Sciences, 9(15), 3089. https://doi.org/10.3390/app9153089