Structural Reliability Estimation with Participatory Sensing and Mobile Cyber-Physical Structural Health Monitoring Systems



Abstract
1. Introduction
2. Materials and Methods
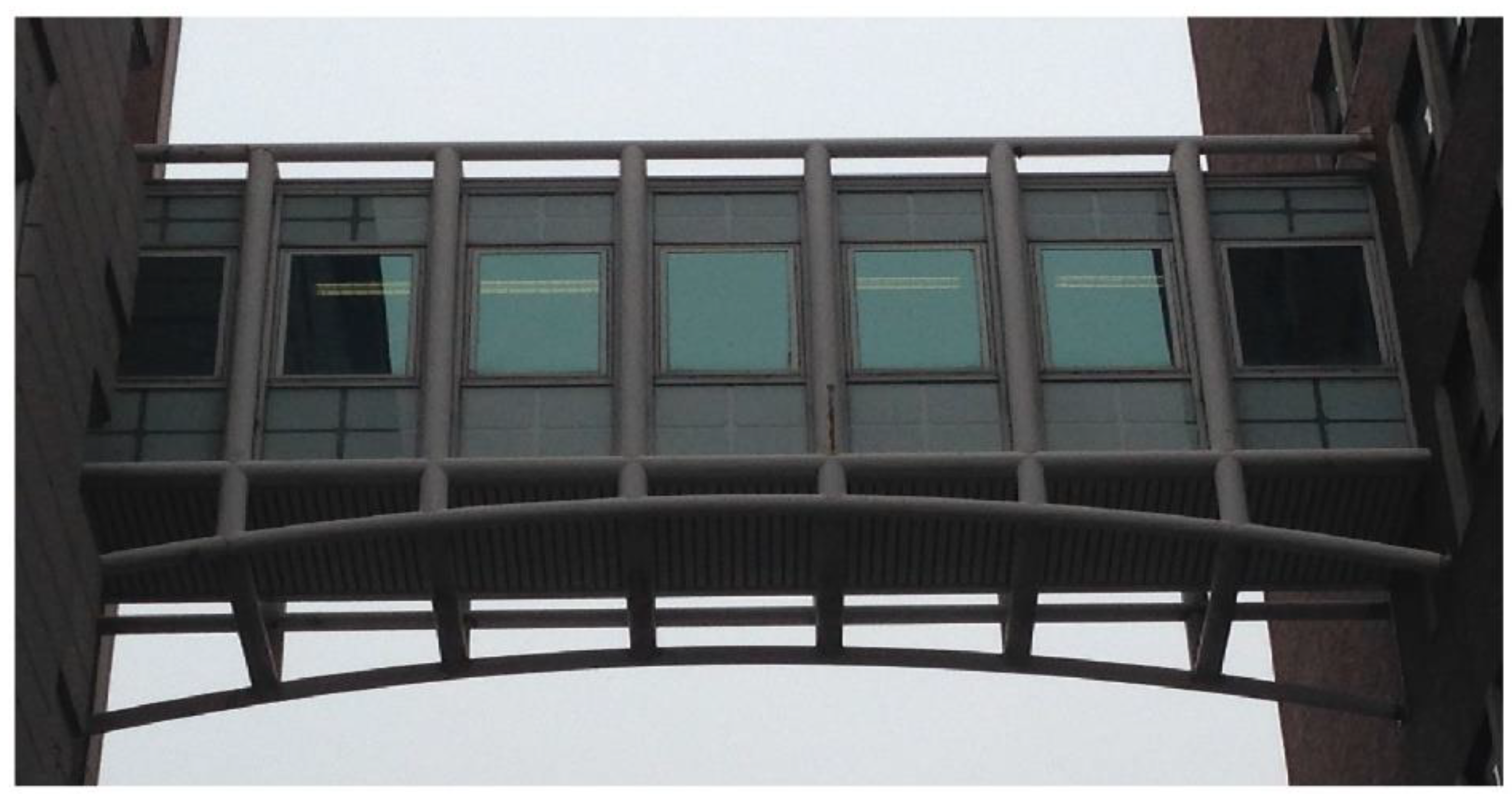
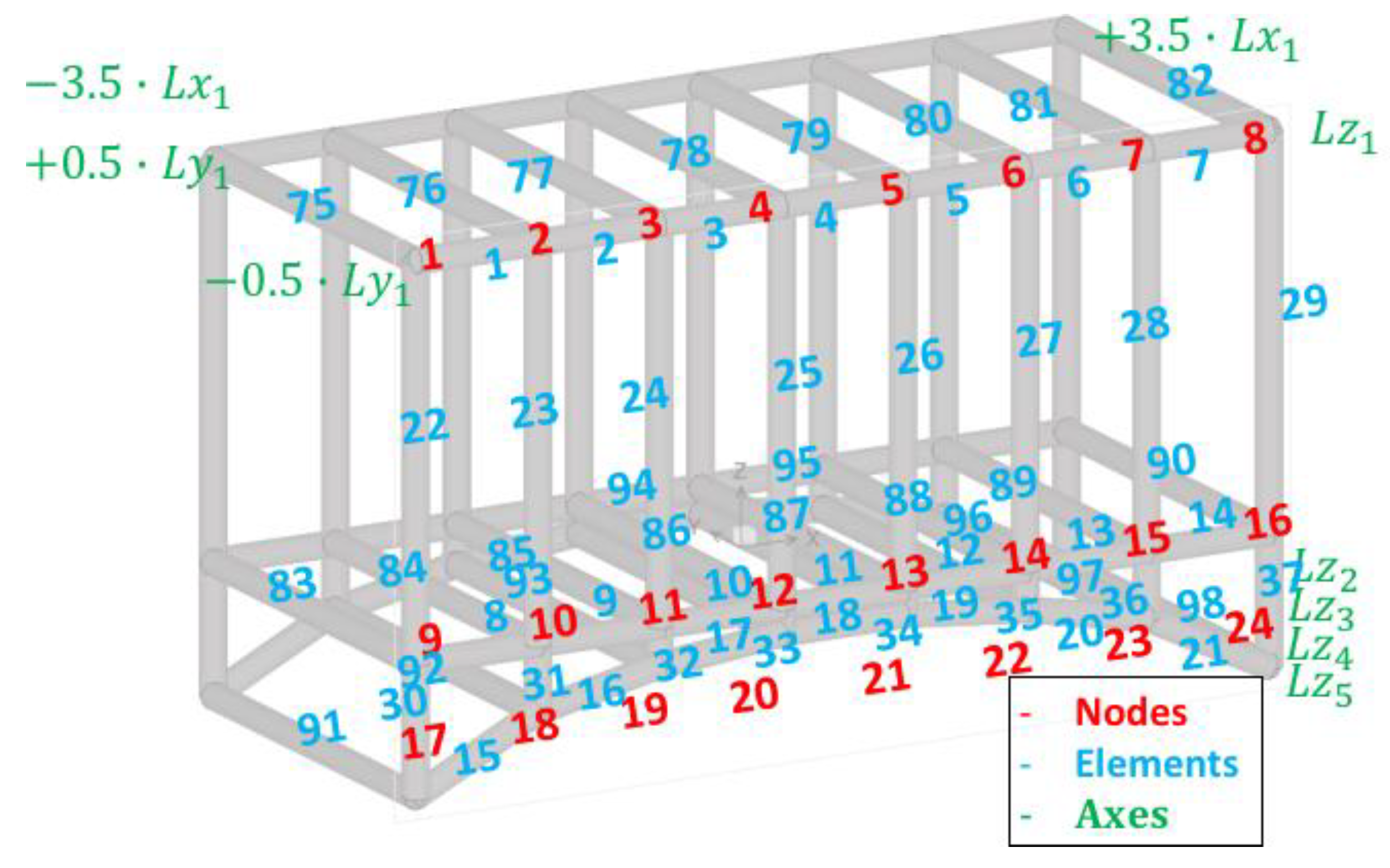
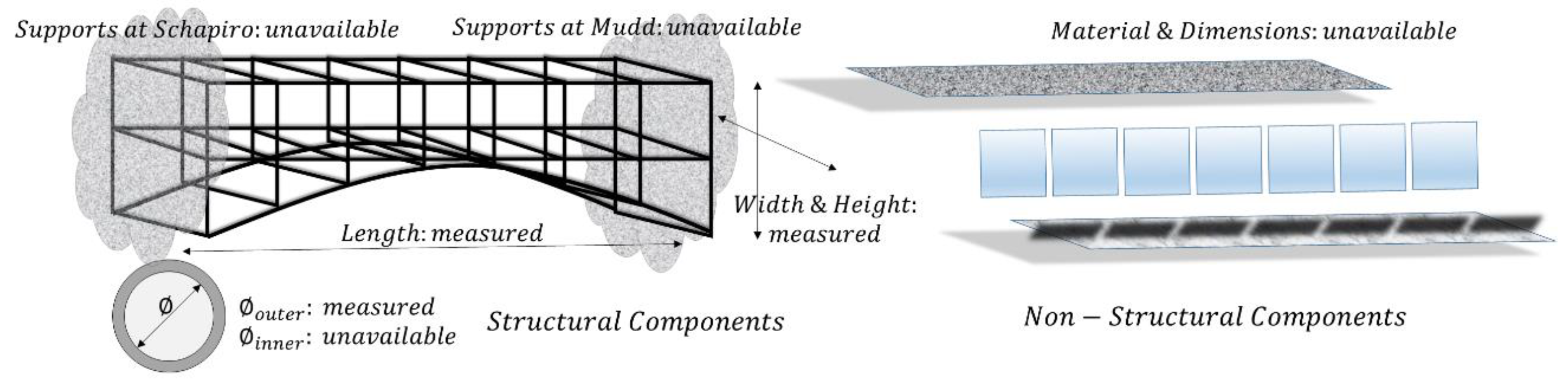
2.1. Testbed Structure
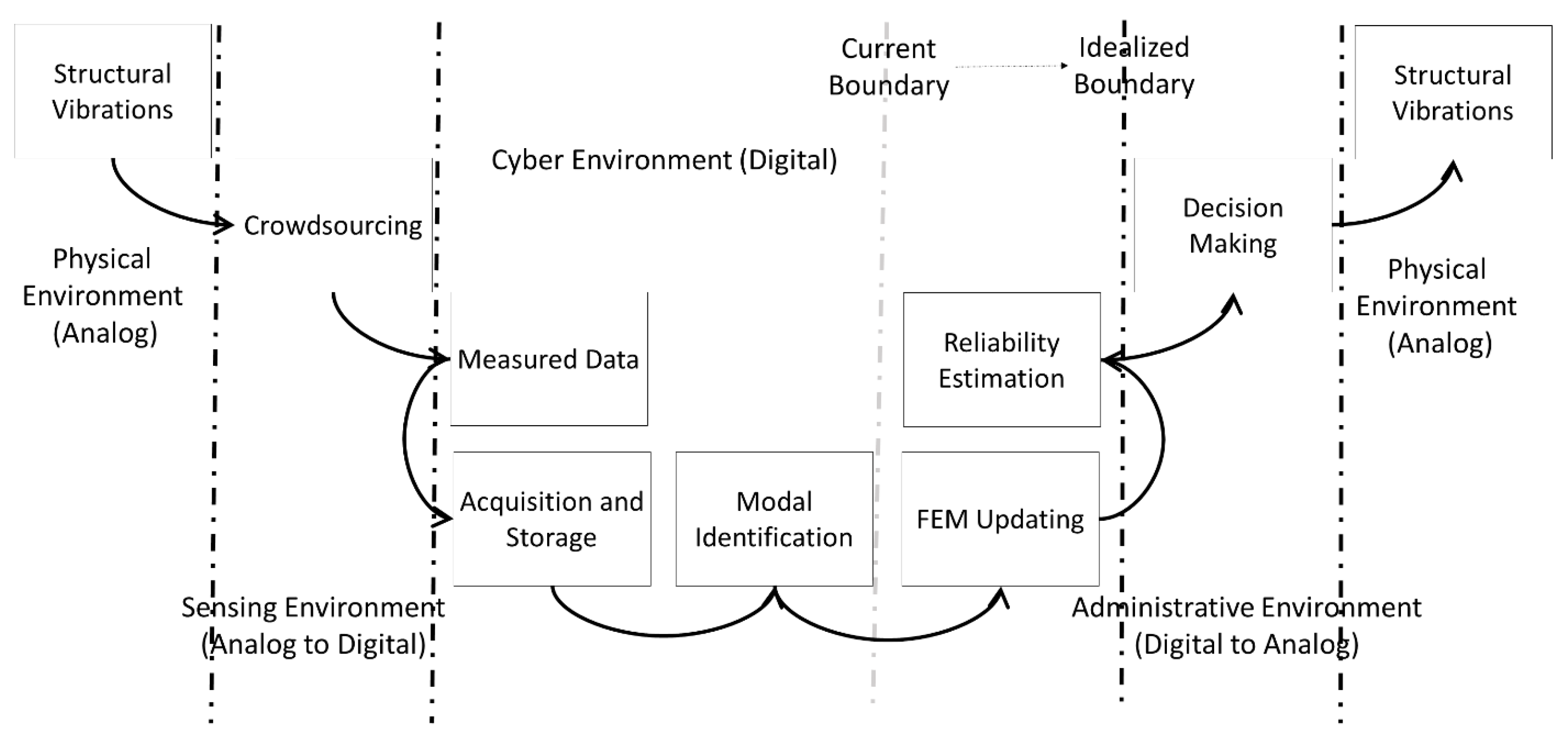
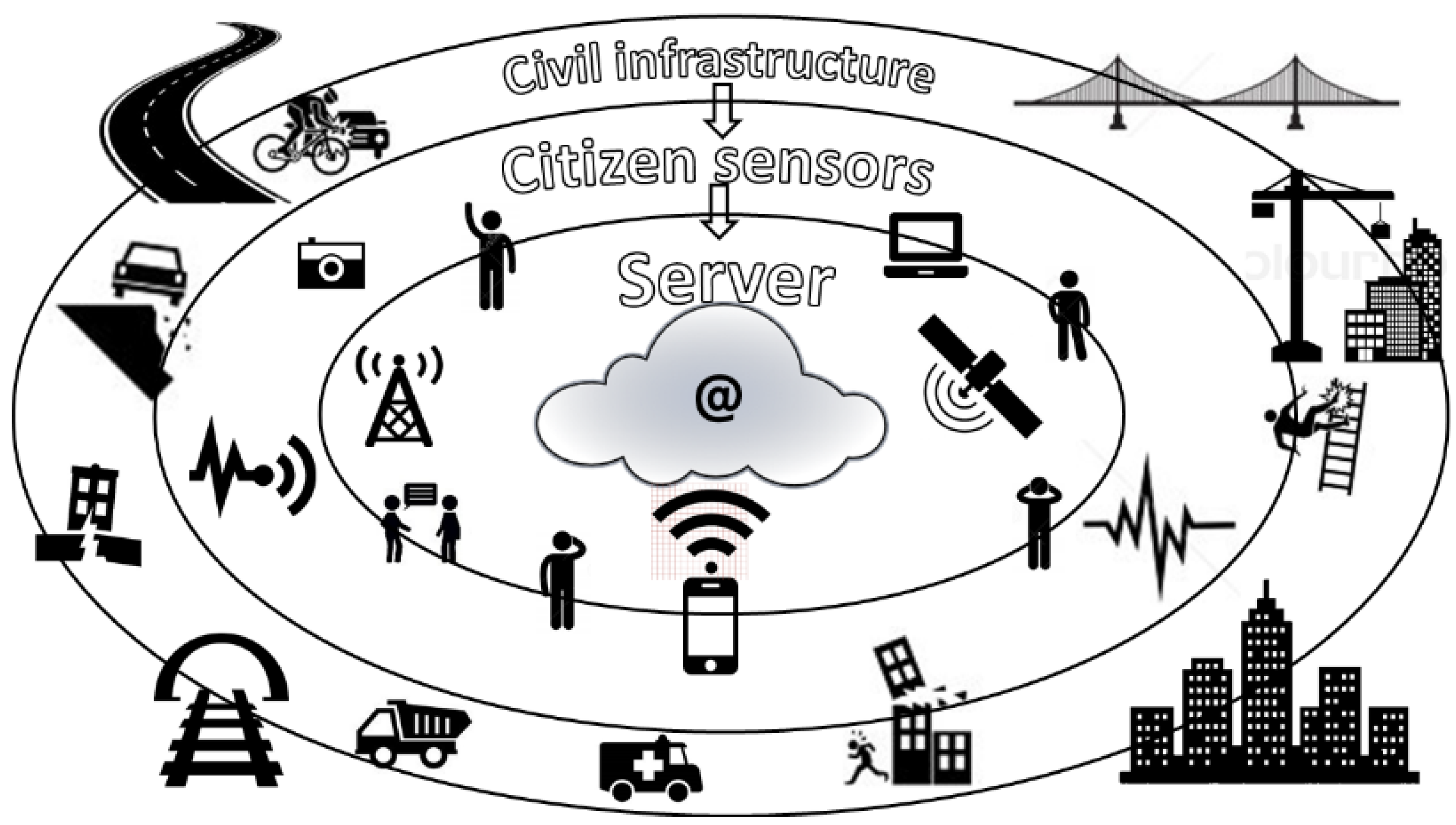
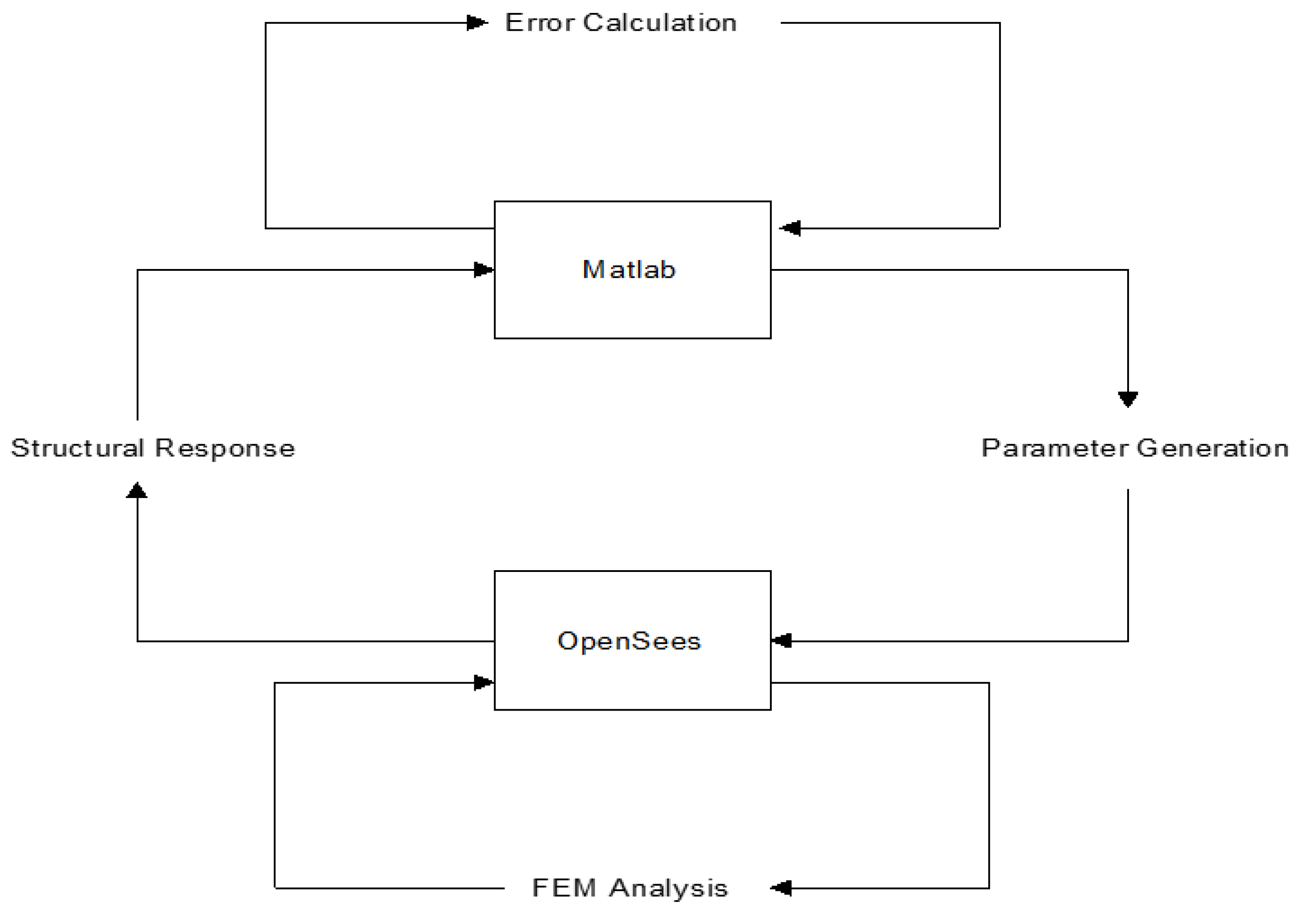
2.2. Cyber-Physical System
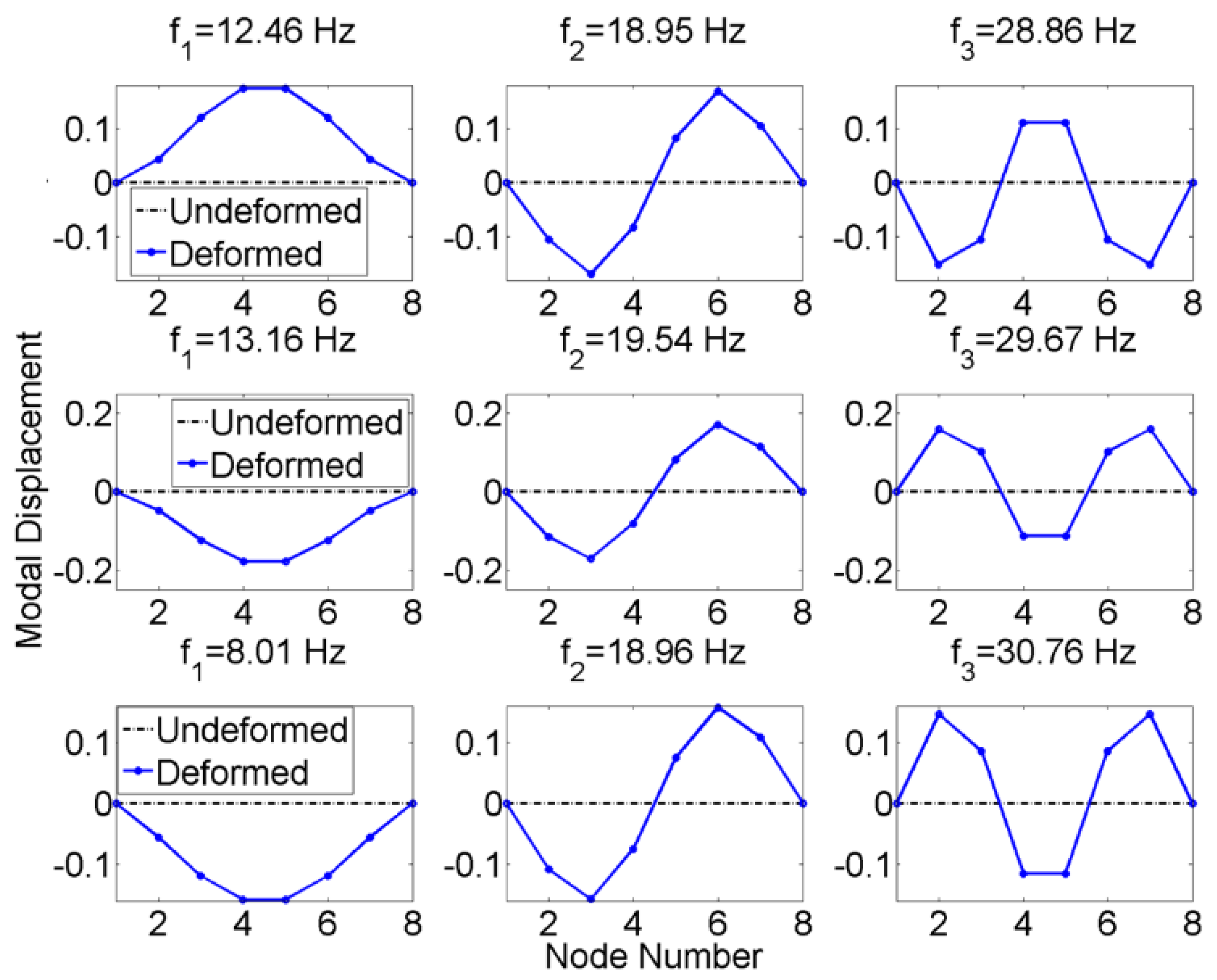
2.3. Finite Element Model Updating
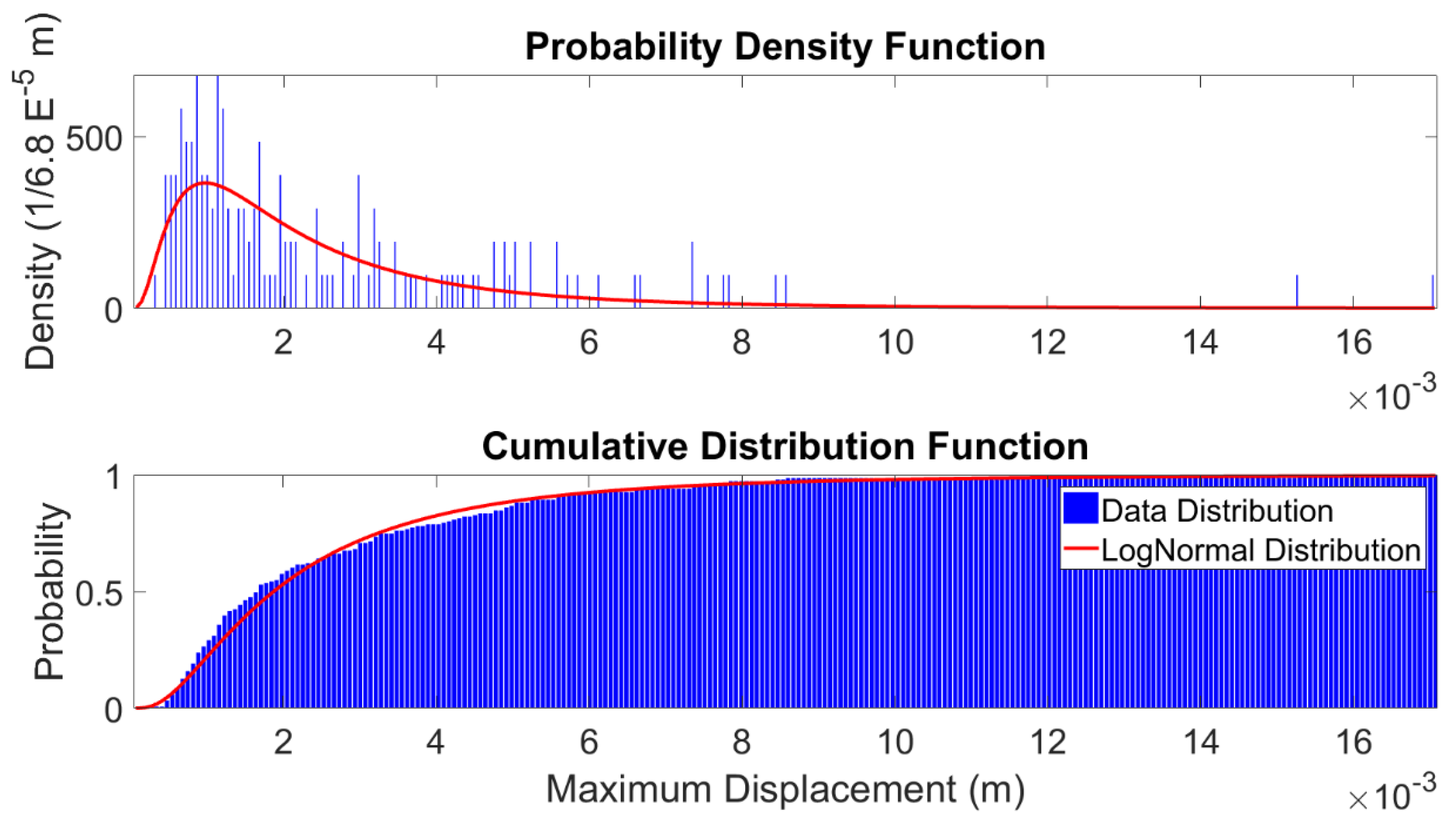
2.4. Structural Reliability Estimation
3. Results and Discussion
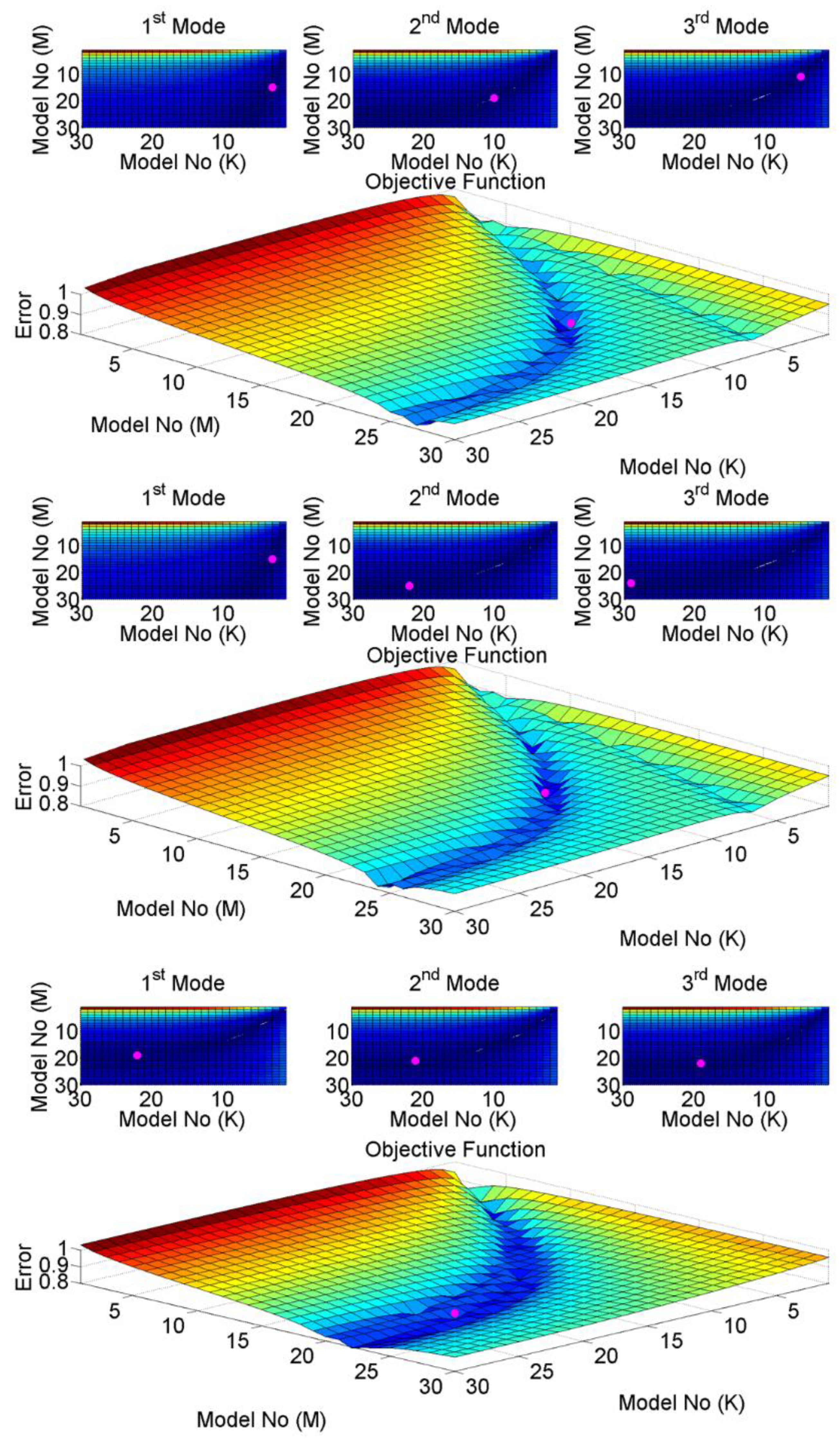
3.1. Objective Function Minimization
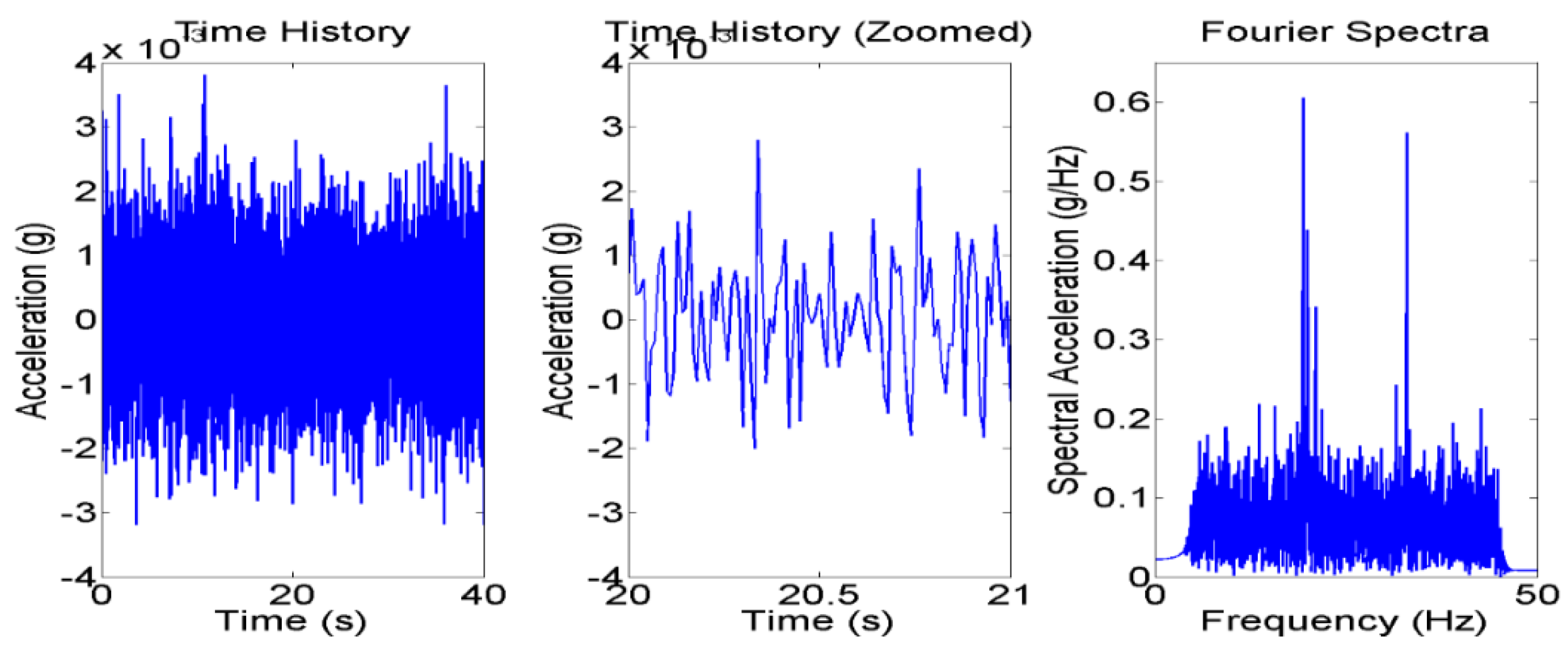
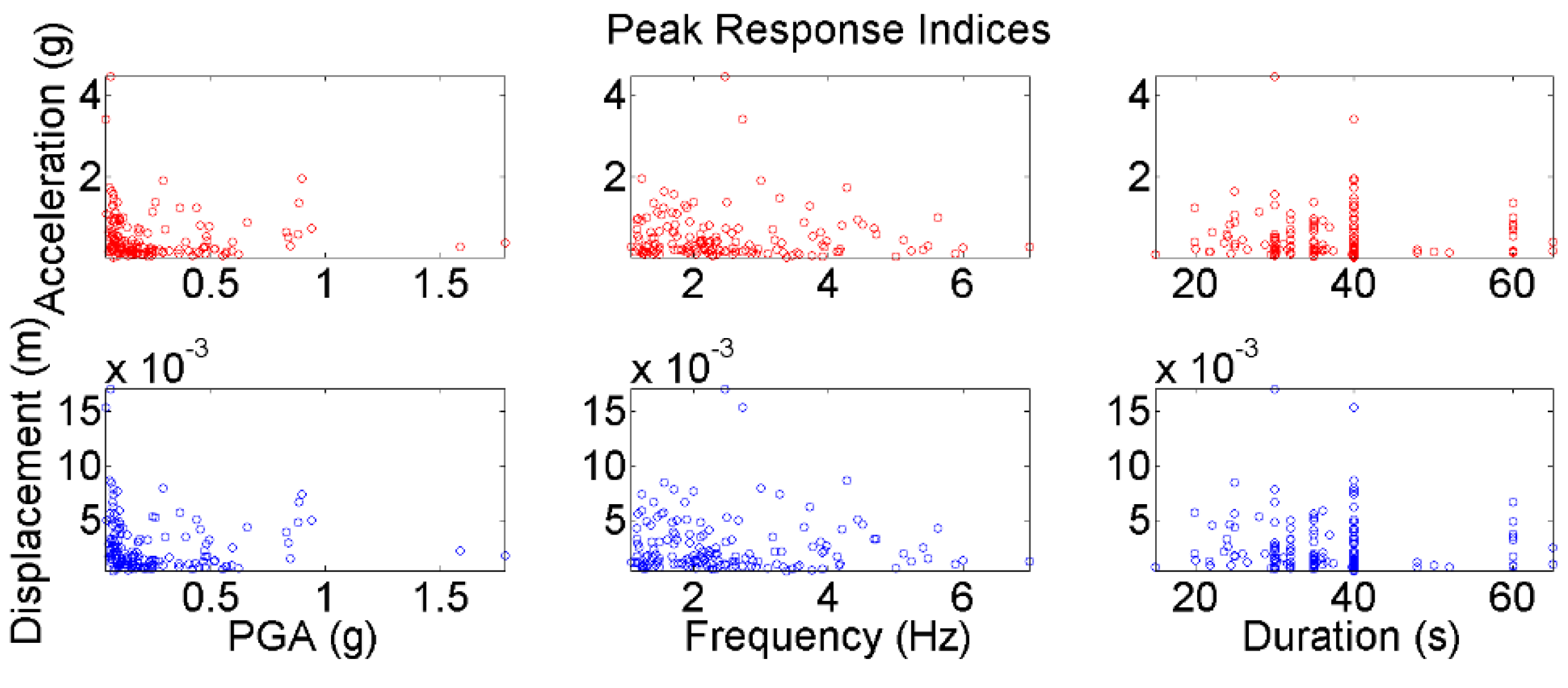
3.2. Simulation of Seismic Response and Reliability
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- ASCE. Seismic Evaluation and Retrofit of Existing Buildings (ASCE/SEI 41-13); American Society of Civil Engineers: Reston, VA, USA, 2014. [Google Scholar]
- AASHTO. LRFD Bridge Design Specifications; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2015. [Google Scholar]
- Doebling, S.W.; Farrar, C.R.; Prime, M.B. A summary review of vibration-based damage identification methods. Shock Vib. Dig. 1998, 30, 91–105. [Google Scholar] [CrossRef]
- Carden, E.P.; Fanning, P. Vibration based condition monitoring: A review. Struct. Health Monit. 2004, 3, 355–377. [Google Scholar] [CrossRef]
- Brownjohn, J.M. Structural health monitoring of civil infrastructure. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2007, 365, 589–622. [Google Scholar] [CrossRef] [PubMed]
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Wahbeh, A.M.; Caffrey, J.P.; Masri, S.F. A vision-based approach for the direct measurement of displacements in vibrating systems. Smart Mater. Struct. 2003, 12, 785. [Google Scholar] [CrossRef]
- Lee, J.J.; Shinozuka, M. A vision-based system for remote sensing of bridge displacement. Ndt E Int. 2006, 39, 425–431. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q.; Ozer, E.; Fukuda, Y. A vision-based sensor for noncontact structural displacement measurement. Sensors 2015, 15, 16557–16575. [Google Scholar] [CrossRef]
- Farrar, C.R.; Park, G.; Allen, D.W.; Todd, M.D. Sensor network paradigms for structural health monitoring. Struct. Control Health Monit. 2006, 13, 210–225. [Google Scholar] [CrossRef]
- Lynch, J.P.; Loh, K.J. A summary review of wireless sensors and sensor networks for structural health monitoring. Shock Vib. Dig. 2006, 38, 91–130. [Google Scholar] [CrossRef]
- Gao, Y.; Spencer, B.F.; Ruiz-Sandoval, M. Distributed Computing Strategy for Structural Health Monitoring. Struct. Control Health Monit. 2006, 13, 488–507. [Google Scholar] [CrossRef]
- Lynch, J.P. An overview of wireless structural health monitoring for civil structures. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2007, 365, 345–372. [Google Scholar] [CrossRef] [PubMed]
- Aygün, B.; Cagri Gungor, V. Wireless sensor networks for structure health monitoring: Recent advances and future research directions. Sens. Rev. 2011, 31, 261–276. [Google Scholar] [CrossRef]
- Prasad, P. Recent trend in wireless sensor network and its applications: A survey. Sens. Rev. 2015, 35, 229–236. [Google Scholar] [CrossRef]
- Farhey, D.N. Integrated virtual instrumentation and wireless monitoring for infrastructure diagnostics. Struct. Health Monit. 2006, 5, 29–43. [Google Scholar] [CrossRef]
- Liu, S.C.; Tomizuka, M.; Ulsoy, G. Strategic issues in sensors and smart structures. Struct. Control Health Monit. 2006, 13, 946–957. [Google Scholar] [CrossRef]
- Spencer, B.F.; Ruiz-Sandoval, M.E.; Kurata, N. Smart sensing technology: Opportunities and challenges. Struct. Control Health Monit. 2004, 11, 349–368. [Google Scholar] [CrossRef]
- Jeong, M.J.; Koh, B.H. A decentralized approach to damage localization through smart wireless sensors. Smart Struct. Syst. 2009, 5, 43–54. [Google Scholar] [CrossRef]
- Taylor, S.G.; Farinholt, K.M.; Flynn, E.B.; Figueiredo, E.; Mascarenas, D.L.; Moro, E.A.; Park, G.; Todd, M.D.; Farrar, C.R. A mobile-agent-based wireless sensing network for structural monitoring applications. Meas. Sci. Technol. 2009, 20, 045201. [Google Scholar] [CrossRef]
- Chen, B.; Liu, W. Mobile agent computing paradigm for building a flexible structural health monitoring sensor network. Comput.-Aided Civ. Infrastruct. Eng. 2010, 25, 504–516. [Google Scholar] [CrossRef]
- Zhu, D.; Yi, X.; Wang, Y.; Lee, K.M.; Guo, J. A mobile sensing system for structural health monitoring: Design and validation. Smart Mater. Struct. 2010, 19, 055011. [Google Scholar] [CrossRef][Green Version]
- OBrien, E.J.; Keenahan, J. Drive-by damage detection in bridges using the apparent profile. Struct. Control Health Monit. 2015, 22, 813–825. [Google Scholar] [CrossRef]
- Sun, H.; Büyüköztürk, O. Identification of traffic-induced nodal excitations of truss bridges through heterogeneous data fusion. Smart Mater. Struct. 2015, 24, 075032. [Google Scholar] [CrossRef]
- Lienhart, W. Challenges in the analysis of inhomogeneous structural monitoring data. J. Civ. Struct. Health Monit. 2013, 3, 247–255. [Google Scholar] [CrossRef]
- Chatzi, E.N.; Smyth, A.W. The unscented Kalman filter and particle filter methods for nonlinear structural system identification with non-collocated heterogeneous sensing. Struct. Control Health Monit. 2009, 16, 99–123. [Google Scholar] [CrossRef]
- Cho, S.; Giles, R.K.; Spencer, B.F. System identification of a historic swing truss bridge using a wireless sensor network employing orientation correction. Struct. Control Health Monit. 2015, 22, 255–272. [Google Scholar] [CrossRef]
- Morgenthal, G.; Höpfner, H. The application of smartphones to measuring transient structural displacements. J. Civ. Struct. Health Monit. 2012, 2, 149–161. [Google Scholar] [CrossRef]
- Oraczewski, T.; Staszewski, W.J.; Uhl, T. Nonlinear acoustics for structural health monitoring using mobile, wireless and smartphone-based transducer platform. J. Intell. Mater. Syst. Struct. 2015. [Google Scholar] [CrossRef]
- Zhao, X.; Han, R.; Ding, Y.; Yu, Y.; Guan, Q.; Hu, W.; Ou, J. Portable and convenient cable force measurement using smartphone. J. Civ. Struct. Health Monit. 2015, 5, 481–491. [Google Scholar] [CrossRef]
- Feng, M.; Fukuda, Y.; Mizuta, M.; Ozer, E. Citizen Sensors for SHM: Use of Accelerometer Data from Smartphones. Sensors 2015, 15, 2980–2998. [Google Scholar] [CrossRef]
- Ozer, E.; Feng, M.Q.; Feng, D. Citizen Sensors for SHM: Towards a Crowdsourcing Platform. Sensors 2015, 15, 14591–14614. [Google Scholar] [CrossRef]
- Ozer, E.; Feng, M.Q. Synthesizing spatiotemporally sparse smartphone sensor data for bridge modal identification. Smart Mater. Struct. 2016, 25, 085007. [Google Scholar] [CrossRef]
- Ozer, E.; Feng, M.Q. Direction-sensitive smart monitoring of structures using heterogeneous smartphone sensor data and coordinate system transformation. Smart Mater. Struct. 2017, 26, 045026. [Google Scholar] [CrossRef]
- Lasi, H.; Fettke, P.; Kemper, H.G.; Feld, T.; Hoffmann, M. Industry 4.0. Bus. Inf. Syst. Eng. 2014, 6, 239. [Google Scholar] [CrossRef]
- Lee, J.; Bagheri, B.; Kao, H.A. A cyber-physical systems architecture for industry 4.0-based manufacturing systems. Manuf. Lett. 2015, 3, 18–23. [Google Scholar] [CrossRef]
- Lee, E.A. The past, present and future of cyber-physical systems: A focus on models. Sensors 2015, 15, 4837–4869. [Google Scholar] [CrossRef] [PubMed]
- Schirner, G.; Erdogmus, D.; Chowdhury, K.; Padir, T. The future of human-in-the-loop cyber-physical systems. Computer 2013, 46, 36–45. [Google Scholar] [CrossRef]
- Wu, F.J.; Kao, Y.F.; Tseng, Y.C. From wireless sensor networks towards cyber physical systems. Pervasive Mob. Comput. 2011, 7, 397–413. [Google Scholar] [CrossRef]
- Kim, K.D.; Kumar, P.R. Cyber–physical systems: A perspective at the centennial. Proc. IEEE 2012, 100, 1287–1308. [Google Scholar]
- Hu, X.; Chu, T.; Chan, H.; Leung, V. Vita: A crowdsensing-oriented mobile cyber-physical system. Emerg. Top. Comput. IEEE Trans. 2013, 1, 148–165. [Google Scholar] [CrossRef]
- Atzori, L.; Iera, A.; Morabito, G. The internet of things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Gubbi, J.; Buyya, R.; Marusic, S.; Palaniswami, M. Internet of Things (IoT): A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef]
- Gershenfeld, N.; Krikorian, R.; Cohen, D. The Internet of things. Sci. Am. 2004, 291, 76. [Google Scholar] [CrossRef]
- Miorandi, D.; Sicari, S.; De Pellegrini, F.; Chlamtac, I. Internet of things: Vision, applications and research challenges. Ad Hoc Netw. 2012, 10, 1497–1516. [Google Scholar] [CrossRef]
- Özer, E.; Soyöz, S. Vibration-based damage detection and seismic performance assessment of bridges. Earthq. Spectra 2015, 31, 137–157. [Google Scholar] [CrossRef]
- Ozer, E.; Feng, M.Q.; Soyoz, S. SHM-integrated bridge reliability estimation using multivariate stochastic processes. Earthq. Eng. Struct. Dyn. 2015, 44, 601–618. [Google Scholar] [CrossRef]
- Ozer, E. Multisensory Smartphone Applications in Vibration-Based Structural Health Monitoring. Ph.D. Thesis, Columbia University, New York, NY, USA, 2016. [Google Scholar]
- McKenna, F. OpenSees: A framework for earthquake engineering simulation. Comput. Sci. Eng. 2011, 13, 58–66. [Google Scholar] [CrossRef]
- Ozer, E.; Feng, M.Q. Biomechanically influenced mobile and participatory pedestrian data for bridge monitoring. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147717705240. [Google Scholar] [CrossRef]
- Suh, S.C.; Tanik, U.J.; Carbone, J.N.; Eroglu, A. Applied Cyber-Physical Systems; Springer: New York, NY, USA, 2014. [Google Scholar]
- Liu, C.H.; Zhang, Y. Cyber Physical Systems: Architectures, Protocols and Applications; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Hu, F. Cyber-Physical Systems: Integrated Computing and Engineering Design; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Siddesh, G.M.; Deka, G.; Srinivasa, K.G.; Patnaik, L.M. Cyber-Physical Systems: A Computational Perspective; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Ghanem, R.; Shinozuka, M. Structural-system identification. I: Theory. J. Eng. Mech. 1995, 121, 255–264. [Google Scholar] [CrossRef]
- Shinozuka, M.; Ghanem, R. Structural system identification. II: Experimental verification. J. Eng. Mech. 1995, 121, 265–273. [Google Scholar] [CrossRef]
- Dashti, S.; Bray, J.D.; Reilly, J.; Glaser, S.; Bayen, A.; Mari, E. Evaluating the reliability of phones as seismic monitoring instruments. Earthq. Spectra 2014, 30, 721–742. [Google Scholar] [CrossRef]
- Shinozuka, M.; Deodatis, G. Simulation of stochastic processes by spectral representation. Appl. Mech. Rev. 1991, 44, 191–204. [Google Scholar] [CrossRef]
- Chiou, B.; Darragh, R.; Gregor, N.; Silva, W. NGA project strong-motion database. Earthq. Spectra 2008, 24, 23–44. [Google Scholar] [CrossRef]
- Kircher, C.A.; Reitherman, R.K.; Whitman, R.V.; Arnold, C. Estimation of earthquake losses to buildings. Earthq. Spectra 1997, 13, 703–720. [Google Scholar] [CrossRef]
- Nielson, B.G.; DesRoches, R. Analytical seismic fragility curves for typical bridges in the central and southeastern United States. Earthq. Spectra 2007, 23, 615–633. [Google Scholar] [CrossRef]
- GANA, B. GANA Glazing Manual; Glass Association of North America: Topeka, KS, USA, 2004. [Google Scholar]
- O’Brien, W.C., Jr.; Memari, A.M.; Kremer, P.A.; Behr, R.A. Fragility curves for architectural glass in stick-built glazing systems. Earthq. Spectra 2012, 28, 639–665. [Google Scholar] [CrossRef]
- Kramer, S.L. Geotechnical Earthquake Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Roeder, C.W.; Barth, K.E.; Bergman, A. Effect of live-load deflections on steel bridge performance. J. Bridge Eng. 2004, 9, 259–267. [Google Scholar] [CrossRef]
- Nishikawa, K.; Murakoshi, J.; Matsuki, T. Study on the fatigue of steel highway bridges in Japan. Constr. Build. Mater. 1998, 12, 133–141. [Google Scholar] [CrossRef]
- Billing, J.R. Dynamic loading and testing of bridges in Ontario. Can. J. Civ. Eng. 1984, 11, 833–843. [Google Scholar] [CrossRef]
- Hinks, T.; Carr, H.; Truong-Hong, L.; Laefer, D.F. Point cloud data conversion into solid models via point-based voxelization. J. Surv. Eng. 2012, 139, 72–83. [Google Scholar] [CrossRef]
- Castellazzi, G.; D’Altri, A.; Bitelli, G.; Selvaggi, I.; Lambertini, A. From laser scanning to finite element analysis of complex buildings by using a semi-automatic procedure. Sensors 2015, 15, 18360–18380. [Google Scholar] [CrossRef]
- Yang, H.; Xu, X.; Neumann, I. Laser scanning-based updating of a finite-element model for structural health monitoring. IEEE Sens. J. 2015, 16, 2100–2104. [Google Scholar] [CrossRef]
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Boundary Conditions | Optimal | Parameter | Combinations | <K, M> |
|---|---|---|---|---|
| Mode 1 | Mode 2 | Mode 3 | Objective | |
| Fixed-Fixed | <3, 15> | <10, 19> | <5, 11> | <10, 19> |
| Fixed-Pinned | <3, 15> | <22, 25> | <29, 24> | <11, 18> |
| Fixed-Roller | <22, 19> | <21, 21> | <19, 22> | <21, 21> |
| Ground Motion Parameter | Range 1 | Range 2 | Range 3 | Range 4 |
|---|---|---|---|---|
| Frequency (Hz) | 0–3 | 3–6 | 6–10 | 10–50 |
| Number | 112 | 37 | 2 | 0 |
| PGA (g) | 0.1–0.4 | 0.4–1 | 1–2 | |
| Number | 50 | 70 | 29 | 2 |
| Duration (s) | 0–25 | 25–50 | 50–75 | 75–100 |
| Number | 17 | 120 | 14 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ozer, E.; Feng, M.Q. Structural Reliability Estimation with Participatory Sensing and Mobile Cyber-Physical Structural Health Monitoring Systems. Appl. Sci. 2019, 9, 2840. https://doi.org/10.3390/app9142840
Ozer E, Feng MQ. Structural Reliability Estimation with Participatory Sensing and Mobile Cyber-Physical Structural Health Monitoring Systems. Applied Sciences. 2019; 9(14):2840. https://doi.org/10.3390/app9142840
Chicago/Turabian StyleOzer, Ekin, and Maria Q. Feng. 2019. "Structural Reliability Estimation with Participatory Sensing and Mobile Cyber-Physical Structural Health Monitoring Systems" Applied Sciences 9, no. 14: 2840. https://doi.org/10.3390/app9142840
APA StyleOzer, E., & Feng, M. Q. (2019). Structural Reliability Estimation with Participatory Sensing and Mobile Cyber-Physical Structural Health Monitoring Systems. Applied Sciences, 9(14), 2840. https://doi.org/10.3390/app9142840