1. Introduction
Injection-induced seismicity is a by-product in several scientific and industrial applications, such as tapping deep geothermal energy through an enhanced geothermal system (EGS), fracking shale gas, enhanced oil recovery (EOR), disposal of waste fluid, and geological storage of CO
2. Microseismicity can be used to monitor hydraulic fracturing and for reservoir management. However, felt events of magnitude (M) 2 and above near certain projects may have economic and social impacts [
1], and repeated M ≥ 3 events may cause heavy damage, especially at seismically stable sites [
2,
3]. Under certain conditions, earthquake ruptures can be confined to pressurized regions. In contrast, under other conditions, earthquakes are able to propagate as sustained ruptures beyond the zone that experienced a pressure perturbation [
4]. At sites without large-scale pre-existing faults, induced seismicity was limited in-zone (stimulated volume) and was mainly controlled by injection parameters, and thus induced seismicity could be better controlled because seismicity faded out quickly after shut-in. For such cases, as demonstrated by an EGS project, near–real-time seismic monitoring of fluid injection has allowed control of induced earthquakes via a well-designed traffic lighting system [
5]. However, for worse cases encountered in damage events, major seismicity resulted from reactivation of large-scale pre-existing faults having different maturity [
6,
7]. Shear rupture of newly-created tensile fractures or pre-existing fractures opened by hydrofracturing is also a potential source inducing seismicity by later nearby injections [
2,
6]. Normally, earthquakes on immature faults produce stronger ground motions at all frequencies, as compared with that generated by earthquakes on mature faults [
8]. A recent study showed that mature faults in basement and immature faults in sediments demonstrated seismically-different responses to injection operations [
7]. Thus, the structural maturity of faults is an important parameter that should be considered, and the shear behaviors of faults having different maturities should be fully investigated at all scales. The possibility of detecting early signs of fault reactivation, which might be a function of structure maturity, is a key issue in risk assessment and hazard mitigation of injection-inducing seismicity.
Acoustic emission (AE) activity on a laboratory scale can be considered as microseismicity of a magnitude in the range of roughly from −11 to −4 [
9]. Acoustic emission activity in stressed rocks shows similarities with seismicity in the crust via a number of power laws. The commonly accepted law is the Gutenberg and Richter (GR) relation for size distribution and fractal distribution of the AE hypocenter. Beginning with Mogi’s study published in 1962 [
10], numerous laboratory studies have been motivated by the expectation that precursory changes in
b-value may have resulted from stress changes and thus may be used for earthquake prediction and failure prediction in mines. Indeed, laboratory studies of AE events have consistently shown a decrease in
b-value with increasing stress during the deformation of intact samples containing pre-existing microcracks e.g. Refs. [
11,
12,
13,
14,
15].
In recent years, more studies have focused on AEs during frictional sliding on natural fractures/joints or pre-cut faults on laboratory scales because such set-ups provide a better analogue of fault rupture in nature. Systematic variations in
b-value of the magnitude-frequency distribution of AE events were observed during stress buildup and release on laboratory-created fault zones [
16] as well as during stable and unstable frictional sliding experiments on layers of glass beads in a double-direct shear configuration [
17]. In a recent study, the results for unfavorably-oriented pre-cut faults showed similar behaviors: decreasing
b-value followed by a quick jump prior to the stress drop for repeated stick-slip events [
18]. As an integral set, the seismic
b-value, together with parameters in other power laws, worked as an indicator of stress criticality [
19]. Laboratory results have shed some light on detecting pre-failure signs of fault reactivation from seismicity. The present paper describes experimental results obtained during shear rupture of a granitic specimen containing a pre-existing natural fracture, which was an analogue of immature faults. By integrating seismic
b-value into the magnitude-frequency distribution and fractal dimension (or spatial correlation length) in the AE hypocenter distribution, early signs of fault reactivation were examined.
3. Estimation of b-Value and Fractal Dimension
Following the definition of the body-wave earthquake magnitude, the magnitude of an AE event was determined according to the log of the maximum amplitude (
Amax) of the AE signal (roughly say, the vibration velocity of the elastic wave [
21]):
where
A0 was the threshold for detection. Such a definition results in magnitudes consistent with earthquake magnitudes. Since wave attenuation is a function of ray path, some events having insufficient energy could be recorded by only the detector nearest the AE hypocenter. As a result, the number of events counted generally differed between two detectors. Due to the unknown calibration parameter of the PZT sensors, relative magnitudes were normally used. However,
M0 = −11 was used to obtain a rough estimation of the absolute AE magnitude.
As mentioned in the introduction, it is commonly accepted that AE activity in rocks follows the Gutenberg and Richter (GR) relation for frequency-magnitude distribution [
22]:
where
N is the number of events of magnitude
m or greater, and
a and
b are constants. Data recorded by the peak detectors were used to calculate seismic
b-values. In order to investigate the temporal evolution of the
b-value,
b-values were calculated using the maximum likelihood method for a running window of a constant number of AE events (
n) with a running step of
n/4 events (75% overlap). Previous studies have highlighted that the number of AE events influences
b-value analysis [
23]. Thus, a sensitivity analysis was performed for a different number of windows.
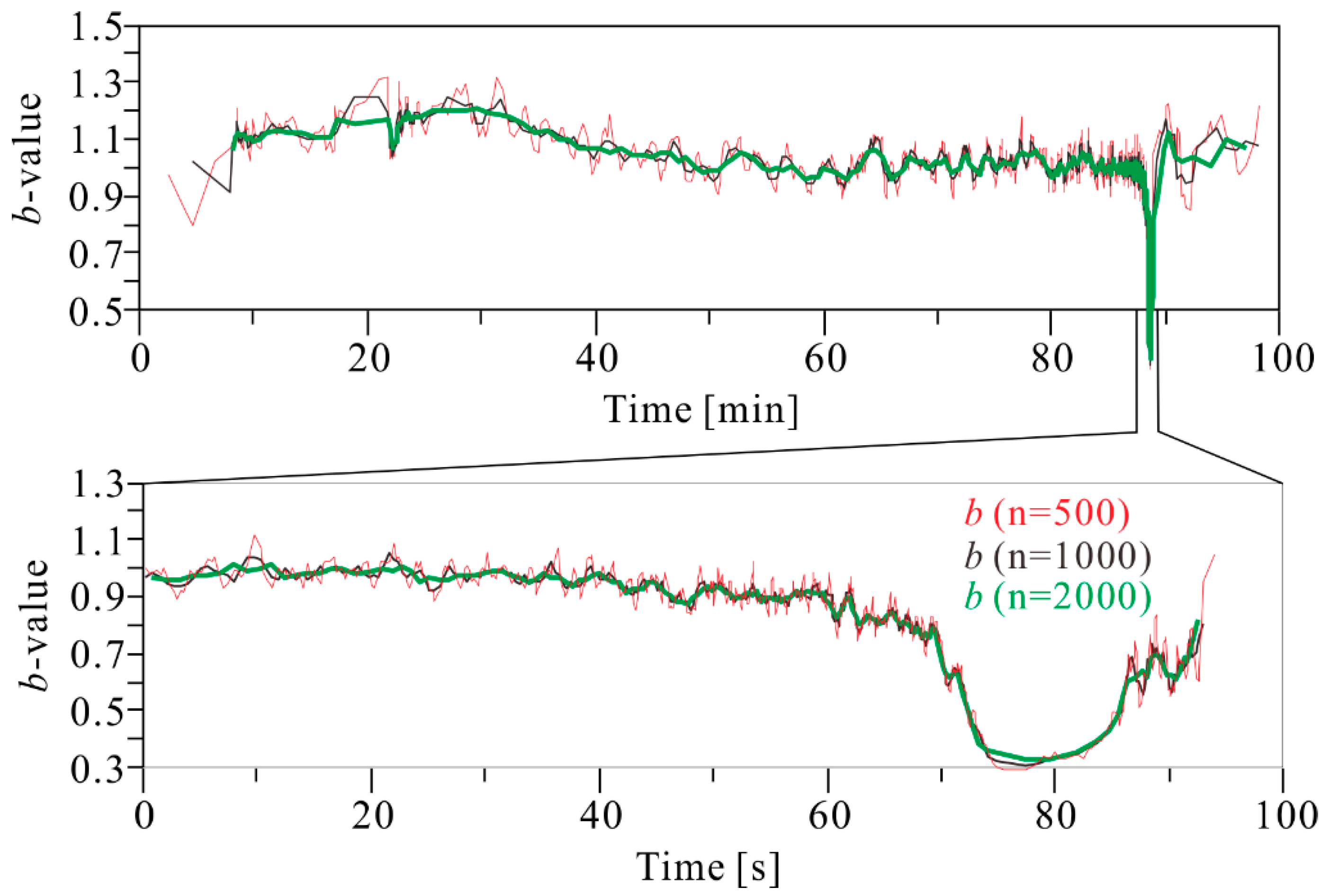
Figure 2 shows
b-values vs. time for
n = 500, 1000, and 2000. It is clearly demonstrated that a larger
n results in a smoother
b-value curve, whereas a smaller
n results in a higher resolution of
b-value evolution. As shown in
Figure 2, the results for
n = 2000 were sufficiently smooth while maintaining the most basic characteristics of
b-value evolution, and thus, they were used in the present study.
Waveform data were used for hypocenter determination. First, the method used for the automatic measurement of the arrival times of seismic signals [
24] was used in the pickup of P-wave 1st motion for AE. Acoustic emission hypocenters were determined automatically using the first arrival time data of P-waves. Time-varied mean anisotropic velocities averaged from measured P-wave velocities (Vp) along multiple paths were used in hypocenter determination. For an event, clear first motions from at least four sensors were required for estimating four unknown parameters (three for source location and one for the original time). Due to heterogeneities in velocity structure and uncertainty in arrival times, more sensors generally resulted in better precision. In the present study, AE hypocenters determined by at least eight P-wave arrival times were used. The estimated location error was less than 2 mm for most hypocenters.
In order to examine the fractal behaviors of AE hypocenters, the correlation integral function was used for the estimation of multi-fractal dimensions [
25]:
where
nj (
R <
r) is the number of hypocenter pairs separated by a distance
R less than or equal to
r,
q is an integer, and
n is the total number of AE events analyzed. The AE hypocenter distribution generally exhibits a power law for any
q,
, and
Dq defines the fractal dimension. The present study focused on
D2, which coincides with the correlation dimension.
Spatial correlation length (SCL) was also used to characterize the spatial distribution of AE hypocenters, which does not require a power-law distribution. Single-link cluster analysis was used to calculate the SCL of a set of
n consecutive events [
26]. First, each individual hypocenter is linked with its nearest neighbor hypocenter to form a set of clusters. Then, every cluster is linked with its nearest cluster. By repeating this process,
n events are connected with
n-1 links. The SCL was defined as the median of the length distribution of the
n-1 links [
27,
28]. In order to reduce the dependence of SCL on the event number and sample dimension, a dimensionless value was given by
where
t,
ξ, and
ξR are time, correlation length, and normalized correlation length, respectively, and
(= 50 mm) is the characteristic linear dimension of the rock specimen. The fractal dimension and SCL were estimated for a different running window, which contains 1000 hypocenters (determined by at least eight P-wave arrival times) and shifts forward by one quarter of the window length.
Since
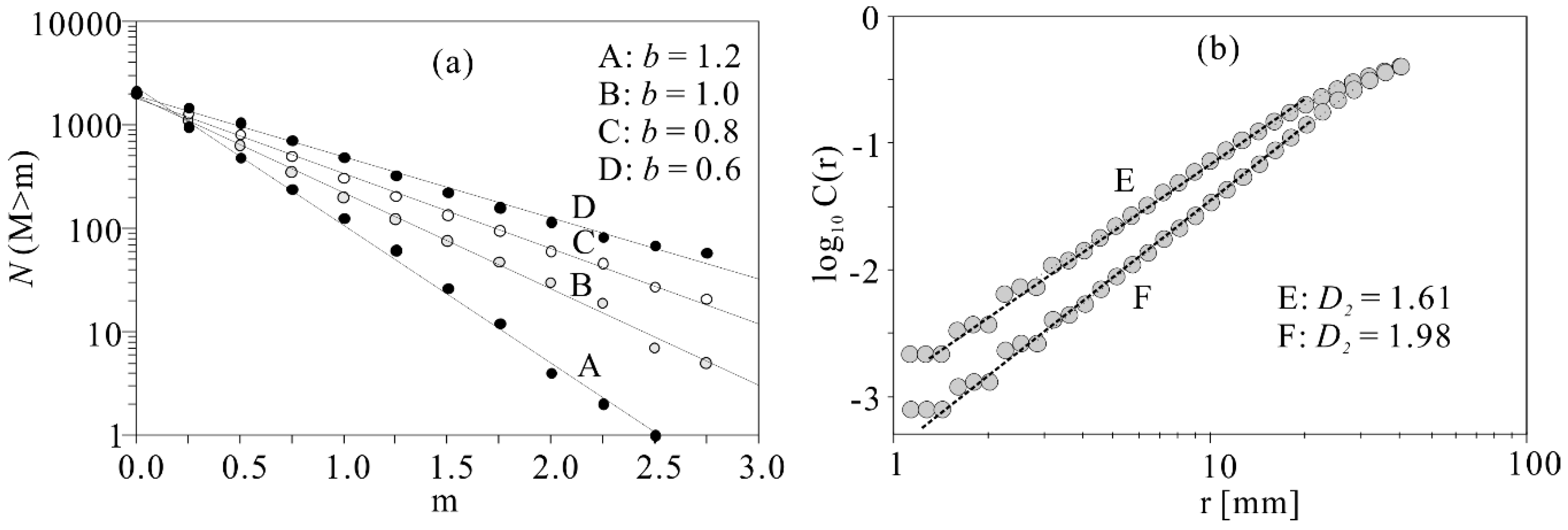
b-value and fractal dimension are the most important data in the present study, the quality of these data was carefully checked.
Figure 3 shows examples of frequency-magnitude distribution and correlation integral functions for selected data points of typical
b-values (1.2, 1.0, 0.8, and 0.6) and fractal dimensions (1.61 and 1.98). The linearity in each set was good enough for estimating reliable
b-values and fractal dimensions. Note that, for examining the correlation among
b-value,
D2, and SCL,
b-values were calculated using the same windows for
D2 and SCL.
4. Results
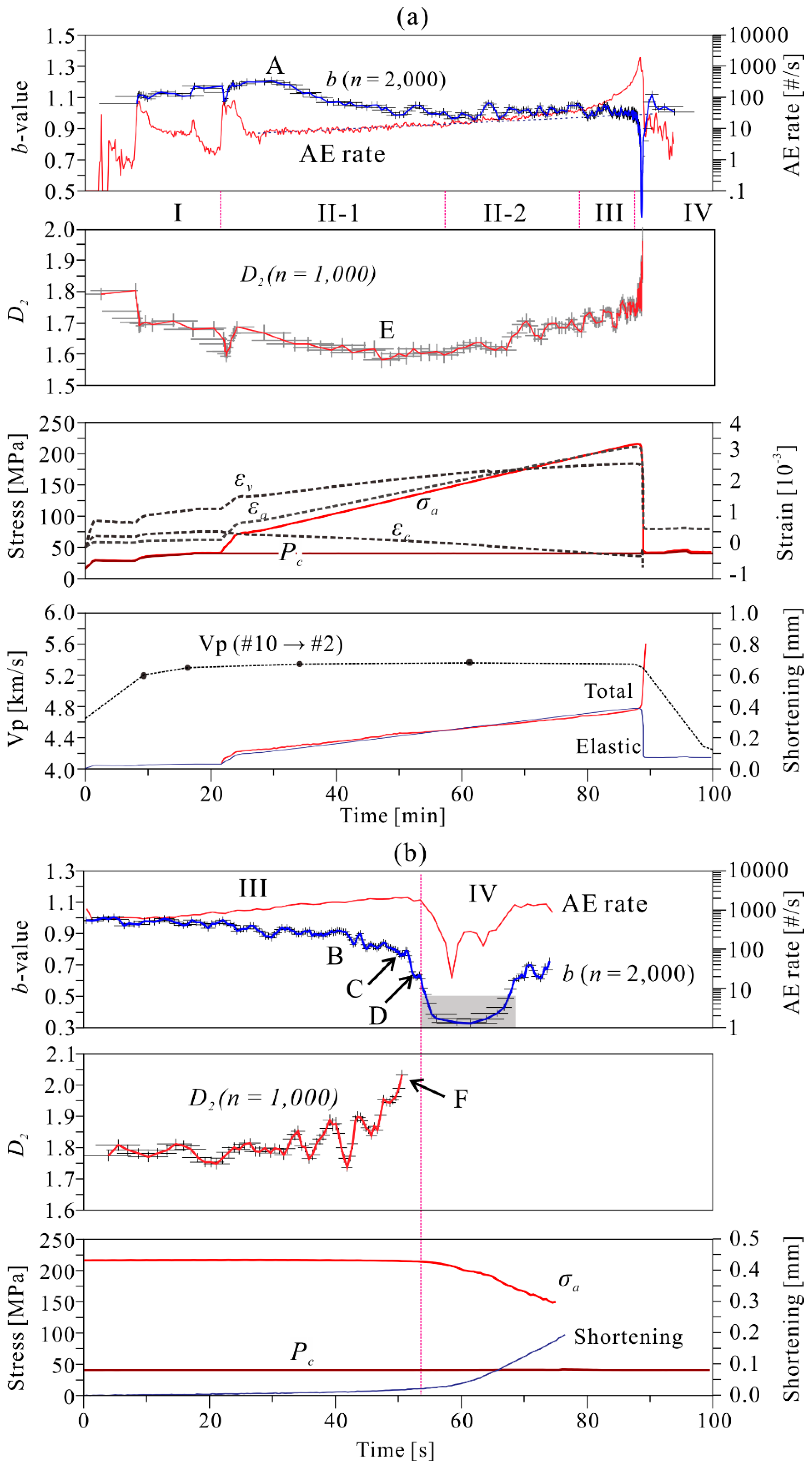
Figure 4 shows key parameters as functions of time and a zoomed view of the final two stages.
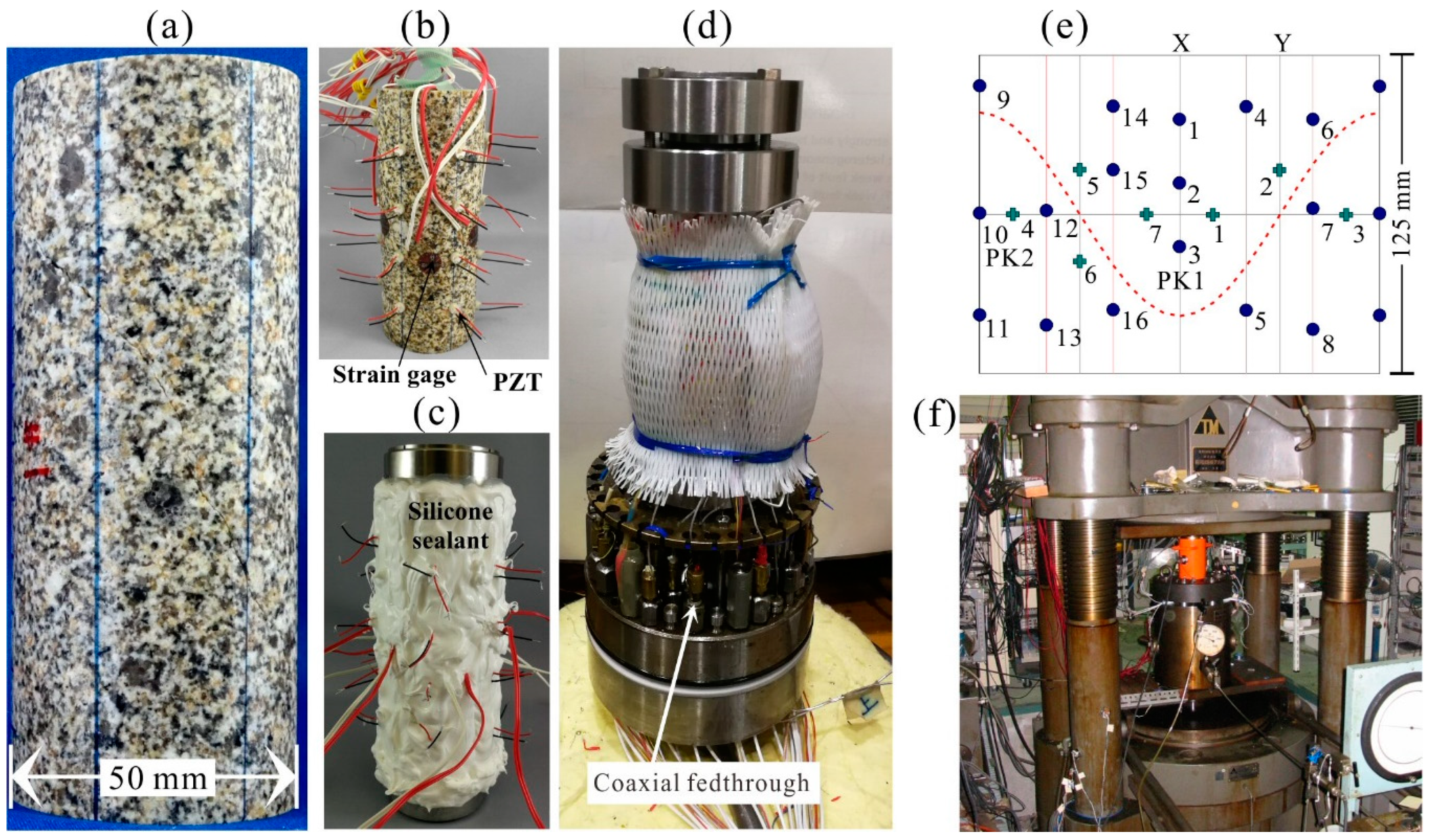
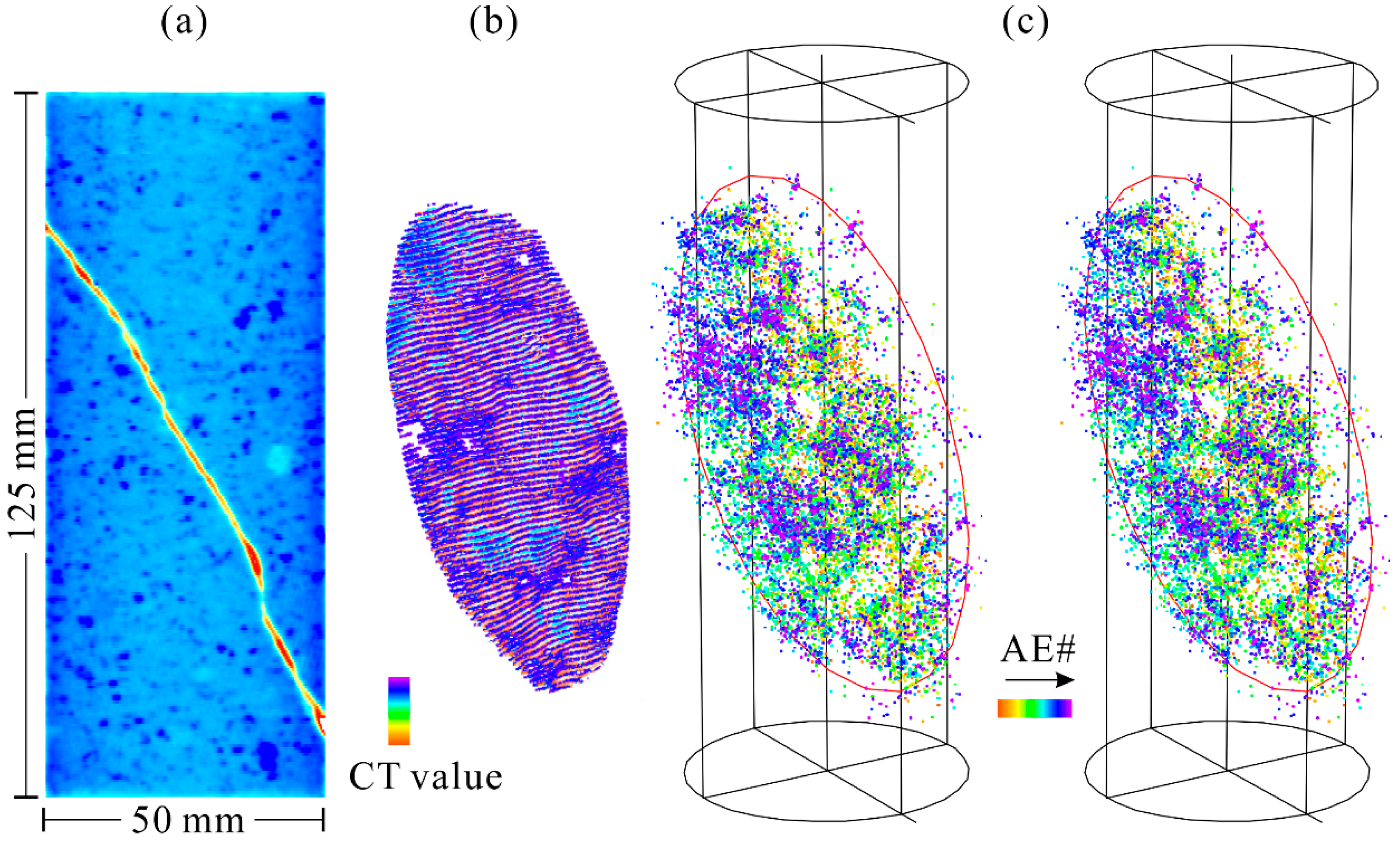
Figure 5 shows a section image of the three-dimensional (3D) X-ray computed tomography (CT) scan performed after the test, the 3D fracture surface, and stereo plots of well-determined AE hypocenters determined by at least 12 arrival times for each event. The CT images showed that the involved fracture had a rough surface. Acoustic emission hypocenters were clustered on the fracture surface within a narrow offset depth.
As shown in
Figure 4, AE activity was initiated at a very low stress level. Many events were observed during the hydrostatic loading stage. Such features were different for similar intact rocks, in which AE activity was initiated at a stress level approximately 60% of the strength [
20]. Thus, the pre-existing immature fault exhibited a very low stress threshold for producing AE activity. In total, more than 100,000 AE events were detected by the peak detectors. A total of 64,100 events were recorded with waveforms, and 42,900 events were located by at least eight arrival times. The evolutions of AE rate,
b-value, and fractal dimension of AE activity, together with rock deformation, demonstrated three pre-failure phases or stages, referred to hereinafter as stages I, II, and III, and a dynamic-aftershock stage, i.e., stage IV. The second stage can be further divided into two substages, stages II-1 and II-2.
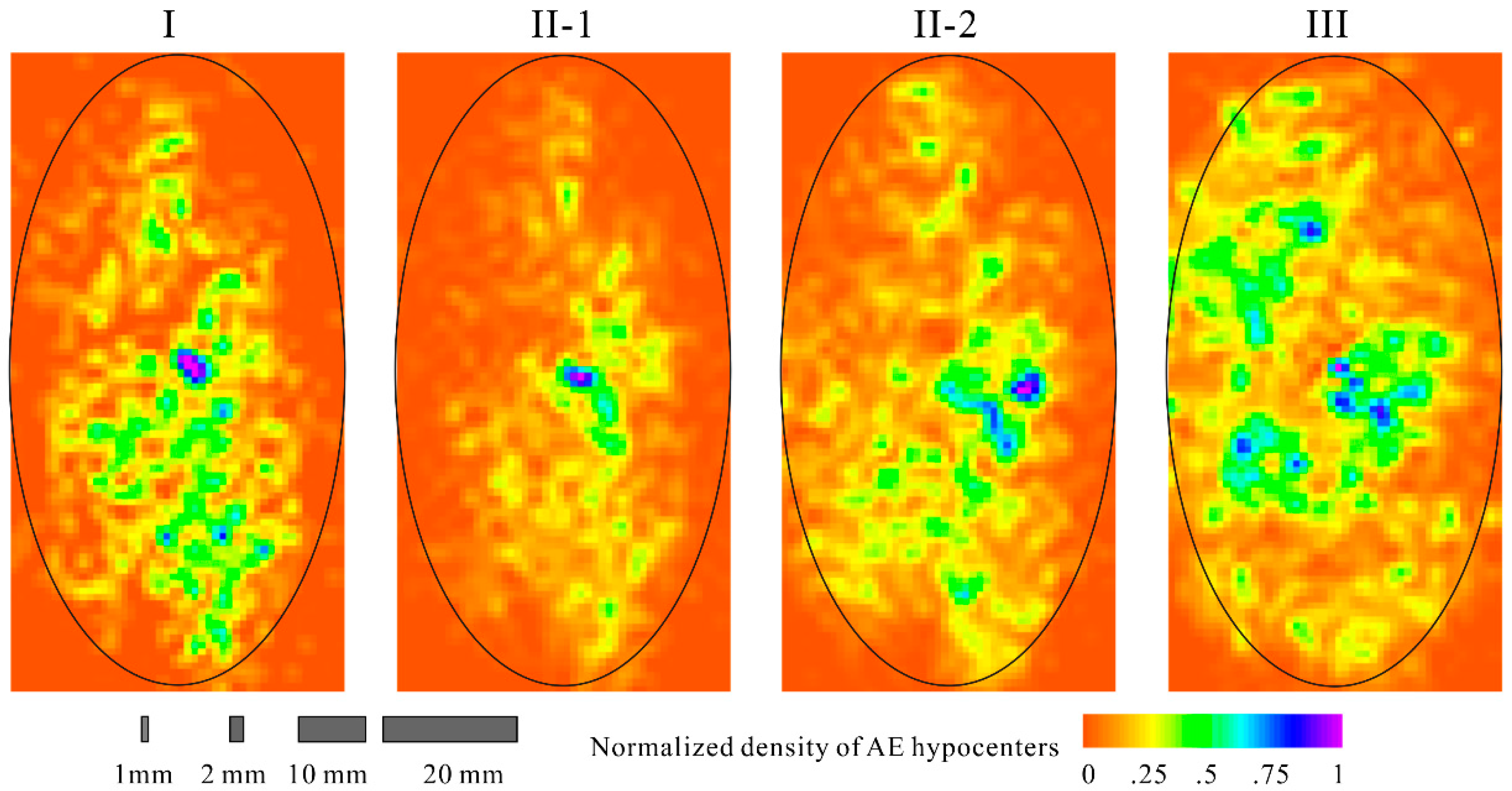
Figure 6 shows normalized density maps of AE hypocenters (determined by at least 12 arrival times) on the fault surface for the pre-failure phases, stages I, II-1, II-2, and III.
Stage I was the hydrostatic compression stage, in which confining pressure and axial stress were simultaneously increased to 40 MPa. During stage I, P velocity increased from 4.5 km/s to 5.4 km/s (
Figure 4a), indicating closure of major microcracks in both the fracture zone and the host rock volume. The fractal dimension decreased from approximately 1.8 to approximately 1.7, while
b-value increased slightly from 1.1 to 1.2. Acoustic emission hypocenters were concentrated in many small clusters having sizes of 2 to 4 mm, which is comparable to major grain sizes (
Figure 5 and
Figure 6). Acoustic emission clusters were distributed along the entire domain of the fault surface, but edge areas showed a relatively low density (
Figure 6).
Stage II-1, which corresponds to an axial loading to a stress level of approximately 50% strength, was characterized by (1) a gradually decreasing
b-value from the maximum value of 1.2 to approximately 1.0; (2) a decreasing fractal dimension from 1.7 to 1.6; (3) an approximately constant
Vp; and (4) averaged axial and volumetric strains showing elastic deformation without detectable fault slip. During stage II-2, inelastic deformation was initiated and increased slowly, and
b-value fluctuated slightly with a mean value of 1.0. In addition, the fractal dimension began to increase. In stage II, the AE event rate exponentially increased with time (or axial stress). In stage II-1, fewer clusters in the center area exhibited higher density (
Figure 6). During stage II-2, the number of clusters having higher density increased (
Figure 6).
The nonlinear behavior of the AE rate and dilatancy deformation were the most important features of stage III (
Figure 3). Acoustic emission that occurs progressively with increasing energy release can be modeled by a power law of time to failure [
19]. The seismic
b-value fluctuated around 1.0, with a slowly decreasing tendency, and then decreased rapidly to approximately 0.6 just before failure. Fractal dimension increased from 1.8 to 2.0. A fractal dimension of 2.0 reflects a homogeneously random distribution on the 2D plane. Together with the density distribution of AE hypocenters on the fault plane (
Figure 6), it was evident that uncorrelated fracture of small asperities led to the formation of a large heterogeneous pattern. During stage III, the fault slipped by approximately 0.02 mm, which can probably be considered to be the critical slip distance.
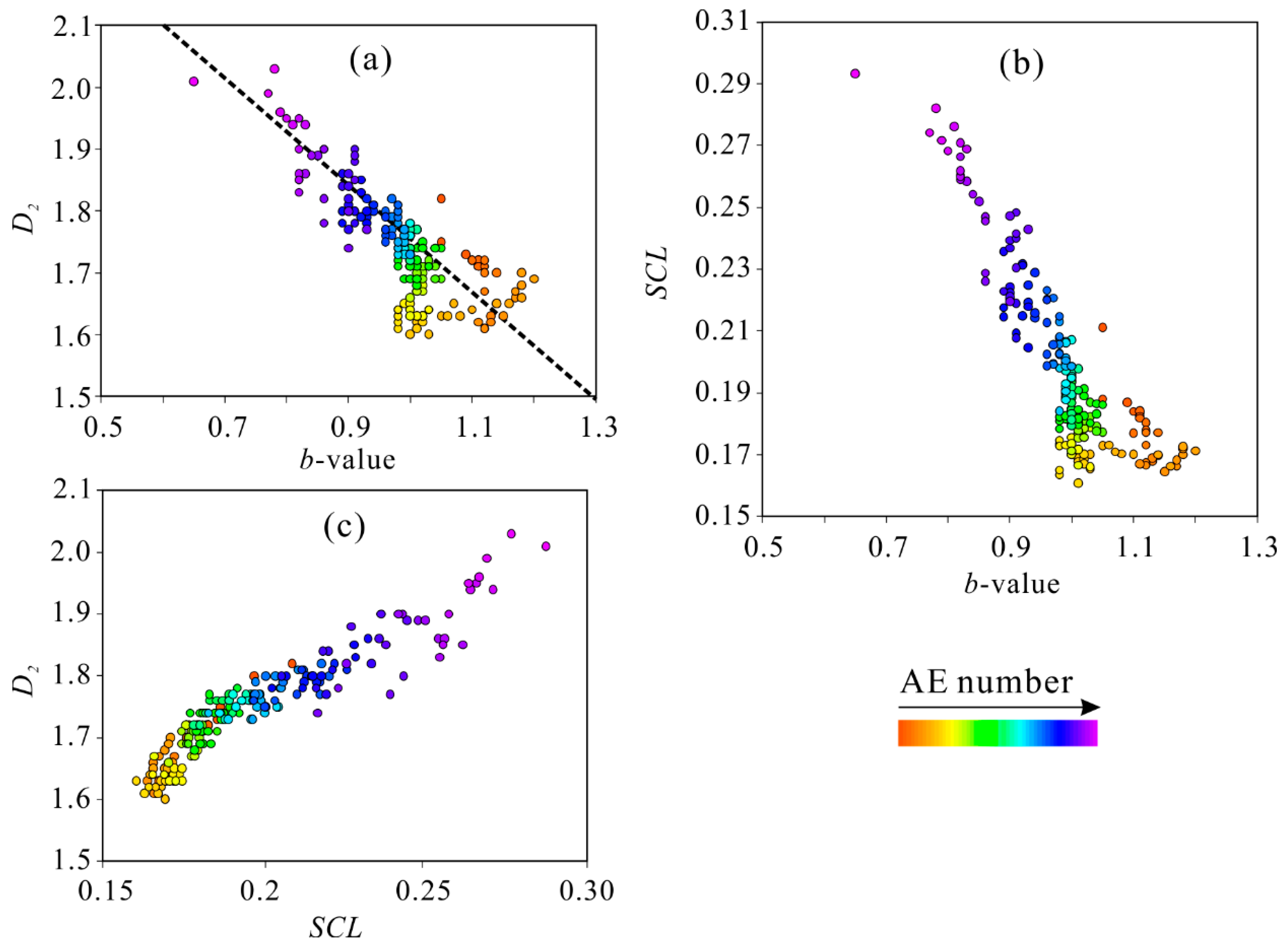
Thus far, the results of SCL have not been mentioned, because SCL behaves similarly to the fractal dimension. Our data set showed that, overall, SCL was positively correlated with the fractal dimension (
Figure 7c), whereas the seismic
b-value was inversely correlated with the fractal dimension and SCL (
Figure 7a,b). As a result, the fractal dimension and SCL can be used alternatively.
The final pre-failure stage was followed by stage IV, including a dynamic rupture stage and following slip stages. During the dynamic stage, the axial stress dropped quickly and fault slip was accelerated. The onboard memory of the waveform recorder was fully used by the end of stage III. Thus, AE hypocenters during stage IV were not determined. Since the event rate was too high and AE signals were seriously overlapped, the obtained b-values were also less accurate.
5. Discussion and Conclusions
Early studies showed that AE activity prior to catastrophic failures in several common rock types is generally characterized by (1) increasing event rate and accelerated energy release, (2) a decrease with a subsequent precursory increase in fractal dimension and SCL, and (3) a decrease in
b-value from approximately 1.5 to 0.5 for hard intact rocks and from approximately 1.1 to 0.8 for soft rocks, such as S–C cataclasite [
19]. Our results for the immature fault in granite demonstrated similar patterns. However, the
b-value ranged between approximately 1.2 and 0.5.
The
b-value of the magnitude-frequency distribution is normally used in seismic hazard assessment for predicting the maximum magnitude. Note that (1)
b-value changes with stress and (2) the maximum earthquakes are sometimes outliers of the power law governing the population behavior of a seismic sequence [
3,
9,
19,
29]. Therefore, the maximum magnitude of a given site should be determined based on the size of reactivated faults. The present experimental results showed that AE hypocenters clustered on the entire fault surface at the very early stages under a very low stress level. This suggests that the dimension of immature faults with active induced seismicity can be determined based on hypocenter distributions of seismicity that occurred in earlier stages. Planarly distributed hypocenters can be used to estimate the lower bound of fault size. It is reasonable to suggest that such a clue depends on the maturity of the faults involved. In the present study, the fault in the granite specimen was very young and had no slip history. For faults of different maturities, the stress level for the onset of detectable AE/microseismic activity and the start points of
b-value and fractal dimension could be different. This is an area that should be investigated further. At a given site, there may be immature faults in the sediment and mature faults in the basement, as is the case for some sites in Ohio [
7]. In seismic hazard assessment for injection-induced seismicity, we must pay more attention to immature faults because shear fracturing of such faults contributes a high level of injection-induced seismicity and greater ground motion [
8]. Unfortunately, however, immature faults with less slip are difficult to detect by geophysical methods. Detailed monitoring and real-time analysis during injection are thus important for detecting unknown faults. For a specific site, in which out-zone seismicity was observed or expected, the maximum magnitude of potential inducing earthquakes should be estimated based on fault size rather than injection volume [
2,
3].
In conclusion, the author investigated the seismic b-value and fractal dimension for AE events during shear rupture of a pre-existing immature fault in a granite specimen under triaxial compression conditions (confining pressure: 40 MPa). The naturally-created fault had an angle of 32° with the axial stress and thus is referred to as favorably oriented.
Acoustic emission activity was initiated at a very low stress level, and the start points of b-value and fractal dimension were approximately 1.2 and 1.8, respectively. The obtained b-values decreased from approximately 1.2 to 1.0 as the shear stress increased and then quickly dropped to approximately 0.5 prior to failure. Acoustic emission hypocenters were clustered on the entire fracture surface area. With increasing stress until failure, fractal dimension exhibited the following pattern: an initial decrease from approximately 1.8 to 1.6, followed by an increase to approximately 1.8, and finally a quick increase to approximately 2.0.
Our results for b-value with respect to magnitude-frequency distribution and the fractal dimension of AE hypocenters preceding the dynamic fracturing of the immature fault demonstrated that it is possible to detect some earlier signs of fault reactivation. A gradually decreasing b-value and slowly growing fractal dimension or SCL may be an intermediate-term indication of fault reactivation, whereas a precursory rapid decrease in b-value and a rapid increase in SCL may facilitate short-term prediction of the rupture of large patches, leading to large earthquakes.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






