2.1. Lidar Waveform Solution by Radiative Transfer Theory
Compared to the simple radiometric solution, the radiative transfer theory of a laser pulse and the numerical solution is quite challenging. Thus, only the essential components of the theory are briefly described here. Refer to References [
11,
12,
13,
14,
15,
16] for the full theories and the numerical solutions [
16]. To solve the governing equation of a lidar system, the irradiance solutions are needed in Equation (1). The irradiance as a function of 2D position vector,
, on the beam cross section at a given distance,
z, is an integration of the radiance distribution over the hemisphere.
Here, the radiance is integrated over infinitesimal solid angle,
, centered on the direction vector
. Thus, we need a radiance distribution function
, which is obtained as a solution of the laser pulse propagation based on the radiative transfer theory.
This is a 3D radiative transfer equation (RTE) that describes the net radiance balance at a given position and direction. The value
is a 3D position vector, c is an attenuation coefficient, and
is a volume scattering function of the medium. Since there is no analytical solution for Equation (3) in 3D, it is reduced to a radiance distribution on a 2D plane perpendicular to the beam direction using small angle approximation because the volume scattering function of the natural air or water medium is strongly forward-oriented.
Here,
is the 2D direction vector defined on the 2D beam cross section and its norm is small according to the small angle approximation,
is a small angle forward-scattering coefficient, and the small angle forward-scattering phase function,
, is defined as a function of difference between incoming and scattered 2D direction vectors. The radiance solution is derived via an analytical Fourier transform.
Here,
is the conjugate frequency variable of the
and
is the analytical Fourier transform of
. Converting Equation (5) into an inverse Fourier transform and plugging it into the Equation (2) yields the following:
Here,
is the effective absorption coefficient and
is the effective attenuation coefficient due to forward scattering. Two things are needed to solve Equation (6). First, the source laser pulse radiance distribution in the Fourier transform, and, second, the effective attenuation coefficient. Assuming a Gaussian beam the radiance and its Fourier Transform are as follows:
Here,
is effective radius defined by multiplication of half of the beam divergence angle,
, and slant altitude,
. The effective attenuation coefficient,
, due to the small angle forward-scattering
is given as follows using the analytical forward-scattering phase function model:
Here,
is a volume scattering function shape parameter by Dolin [
13]. The effective attenuation coefficient,
characterizes the contribution from small angle forward scattering to the attenuation of spatial harmonics of the spatial frequency,
k, in the initial distribution of radiance within a light beam when propagated to the distance,
z, in the medium. Finally, using Equations (7) and (8) the irradiance solution of Equation (6) becomes the following:
Here the effective radius is defined as
and
is the 0-th order first kind Bessel function and
is the geometrical distance of the slant-incident beam projected along the coordinate parallel to the direction of pulse propagation. Equation (9) is a final irradiance solution for a point at
r away from the center on a circular plane at a distance,
z, for a Gaussian laser pulse. Once another irradiance solution for the receiver is calculated in the same manner, the lidar waveform is formed by applying two irradiances in Equation (1) and by computing the numerical integration. Complete details of the theories can be found in [
16].
These equations are most generic to be used for laser pulse propagation through any medium. This level of sophistication is critical when the laser pulse propagates through substantially dense medium, like water for bathymetric lidar. The high absorption and scattering by the natural water medium must be properly handled using these equations. However, if a lidar simulation is only for the topographic objects, the equations can be dramatically simplified. Equation (9) will be a concentric 2D Gaussian defined by the beam spot radius, which is determined by the slant sensor altitude,
and the full beam divergence,
, at the
level. Assuming the instantaneous field of view (IFOV) is significantly larger than the beam divergence, the two irradiance multiplication in the governing Equation (1) is still a Gaussian distribution, mainly determined by the beam divergence as follows:
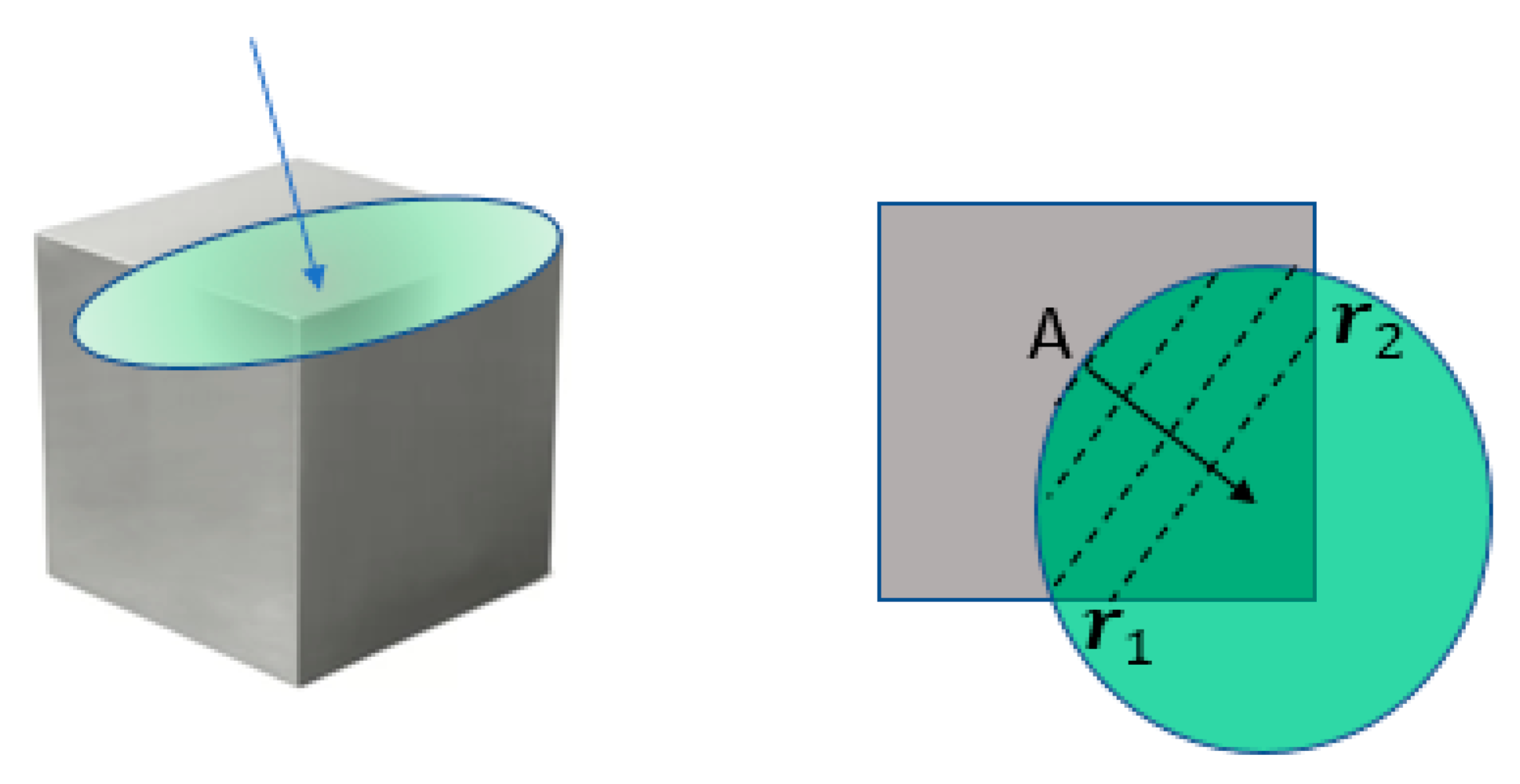
The delta-pulse first touches down at a tiny line segment A (
Figure 2). The length of the interaction line segment increases to the arrow direction and then decreases toward the corner.
The interaction function, in this case, is the target surface reflectance. Assuming the homogeneous reflectance property of the target surface, the value is constant all over the target surface. The radiative transfer-based irradiance solution, , is also a 2D circular plane. However, the plane hits the target surface with a non-zero incident angle to make it a slant plane. Thus, the waveform Equation (1) will be non-zero only along the interaction line segment between the two position vectors and , which results in the 2D integral in a one-dimensional (1D) line integral. The solution can be obtained only via numerical solution because the position of the target is over a random relative position and orientation of the target. The waveform solutions are demonstrated in the Results section.
2.2. Lidar Direct Georeferencing
While the radiative transfer-based waveform approach is the advanced component of the airborne lidar simulator, the direct georeferencing is the backbone of the simulator. A direction vector of an emitted laser pulse defined in sensor body frame (SBF) is defined first, then, by multiplying with the lidar range,
, to a point,
P, on the surface, the position vector in the SBF is determined.
Next, the position vector in SBF
is converted to the position in the IMU body frame (IBF),
, using the following relationship:
where
is the lever-arm vector to the SBF origin in the IBF and
is a rotation matrix that transforms
to
and is defined using three boresighting angles,
, as follows:
Next, the position vector,
, is transformed into a new position vector,
, in a local tangential frame (LTF), as follows:
An LTF is defined in reference to a global geodetic frame, which follows a coordinate axes convention of a North-East-Down (NED) reference frame. The orientation of the IBF, with respect to the LTF, is described by three IMU angles, roll
, pitch
, and heading
, as follows:
Along with the position of the GNSS antenna phase center, the lever-arm distances between the IMU origin and the antenna can be used to calculate the position of the O_IBF (which is the same as O_LTF). Using the latitude,
ϕ, longitude,
, and ellipsoid height,
, from O_LTF, it is possible to form a rotation matrix that transforms an arbitrary position vector in LTF to the position vector in the Earth Centered Earth Fixed (ECEF) coordinate:
In addition to the rotation matrix, the geodetic position
of O_LTF itself can be transformed into the position in the ECEF coordinate using the following relationship:
where
is the semi-major axis,
is the eccentricity, and
is the position in ECEF coordinates. Now the position vector can be solved in ECEF coordinates, as follows:
Finally, the ECEF coordinates are converted to the map projection, such as the Universal Transverse Mercator (UTM) or a state plane.
2.3. Total Propagated Uncertainty (TPU)
The TPU in this simulator is calculated using the following direct georeferencing equation:
This is the equation that describes the position of a point P(x, y, z) in the LTF coordinate. The direct georeferencing equation that calculates the position in LTF indeed includes all the major sources of errors, such as boresighting, scan angle, GNSS position, and IMU angles. Regarding TPU, it is called “total” because multiple error sources are combined and it is called “propagated” because the errors are propagated through Equation (20). The TPU as a statistical uncertainty is computed based on the linear approximation and by ignoring the covariances between multiple parameters.
Currently, the assumption of negligible covariances is accepted in the lidar community. As the TPU is still in its infancy, no major lidar manufacturers (e.g., Teledyne Optech, Hexagon Leica, Riegl) currently provide direct georeferencing proprietary software that computes TPU. The only known exception is the CZMIL bathymetric lidar system that computes TPU with support from the US Army Corps of Engineers (USACE). The TPU model in this research utilizes 14 parameters. Thus, the number of covariance combination is 14 × 14/2, considering the symmetry of the covariance matrix. While most covariances are likely to be negligible, potential exceptions of non-negligible covariances could be the position and orientation parameters. However, even the Applanix IMU systems do not have covariance specifications due to the measurement difficulties, but it is not impossible. Numerous U.S. Geological Survey (USGS) internal lidar accuracy assessments indicate that the uncertainties from airborne lidar data in terms of smooth surface precision [
2] are very close to the computed TPU based on negligible covariances, which justifies the assumption that the negligible covariance is acceptable.
To formulate the TPU computation equations, Equation (20) is rewritten as follows:
The TPU in
x position in LTF is given by the following equation, which is derived from Equation (21) (The TPU for y and z components is also computed in the same manner):
To solve Equation (22), two sets of data are needed. First, the uncertainty, , of each component, which is given as a priori standard deviation. The second is the partial derivative, which is the Jacobian matrix element.
The Jacobian matrix elements for lever-arm displacement and position vector of IBF origin can be derived as follows:
The Jacobian matrix elements for lever-arm displacement and position vector of IBF origin are derived as follows:
The Jacobian matrix elements for boresighting and the IMU angles are derived as follows:
The analytical derivative solutions in Equations (24)–(26) required at the next stage are straight forward, thus they are not described here. The TPU computed via the equations in this section computes the uncertainty associated to the position vector in LTF. This means when the TPU associated with the lidar point cloud in the commonly used 2D map projection coordinate, such as the UTM or state plane, is needed, then the additional uncertainty that occurs in the rest of the coordinate transform needs to be included. Those additional procedures convert the point from LTF to the point in the map projection. Since the major sources of error were already handled in the equations so far, only the uncertainty (
) caused by the projection conversion will be added in the following manner.
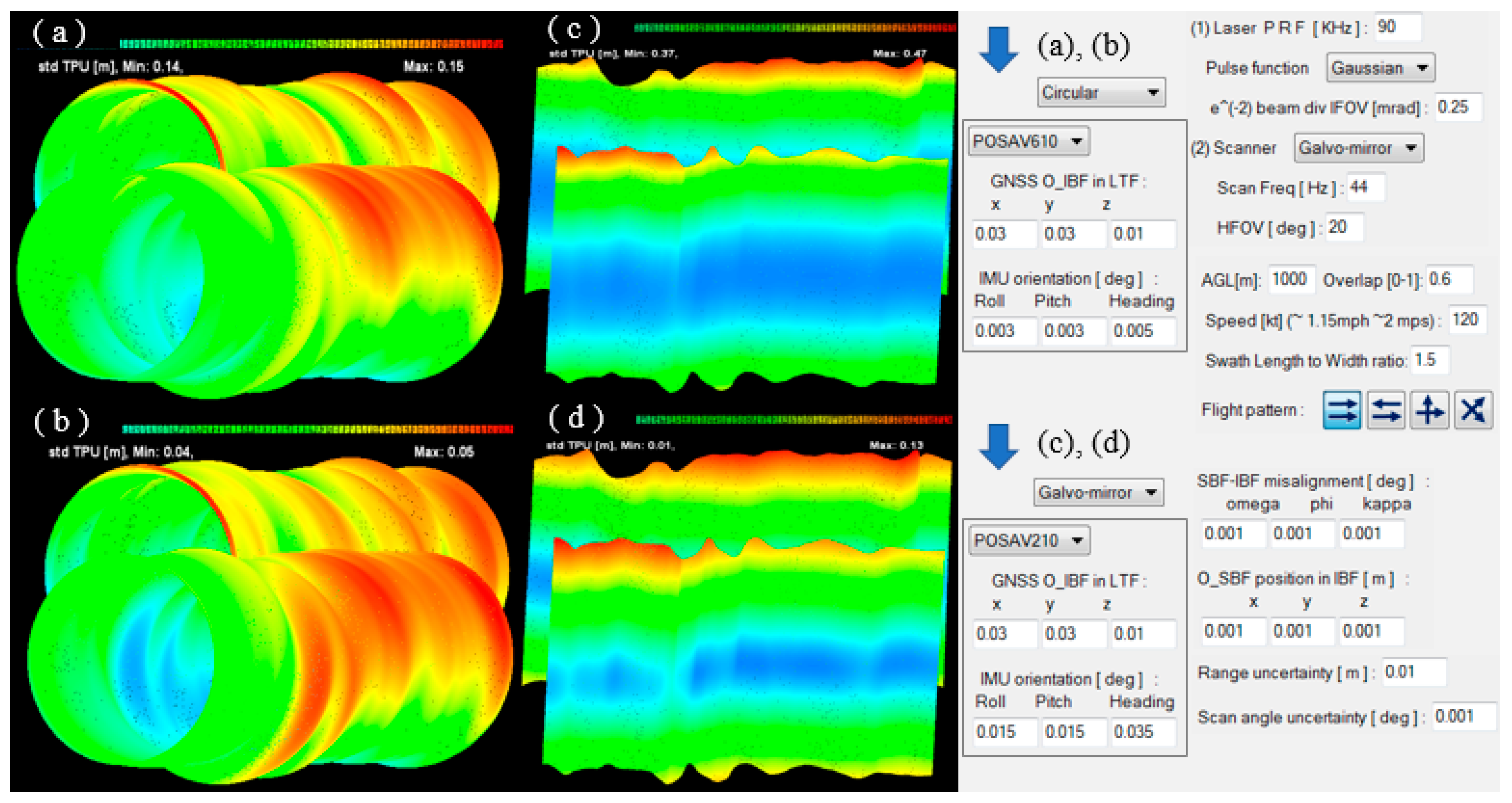
2.4. Airborne Lidar Simulator
An airborne lidar simulator was developed to implement direct georeferencing, target simulation, and the radiative transfer-based waveform modeling. The simulator consists of three main components, as follows:
- (1)
Laser module: PRF [Hz], pulse width [ns], beam divergence [mrad], pulse function;
- (2)
Scanner module: Scanner type, scan frequency [Hz], FOV [deg];
- (3)
Flight parameters: AGL [m], speed [kt], flight pattern, swath overlap.
The pulse function is the radiance distribution function (e.g., Gaussian or Top-hat) on the cross section of a pulse fired at PRF (pulse repetition frequency). The typical scanner types are liner Galvo-mirror, circular, and Palmer scanner. The scanning frequency is an important factor determining the lidar point cloud point density in PPM (points/m) or PPSM (points/m2).
The point density is an important simulation condition because the lidar point cloud positional accuracy is constrained by the point density. The following are the descriptive formulae:
Along track linear point density (PPM_al) is determined by the scanner frequency () and the speed (). Across track density (PPM_ac) is related to the swath width (). Although the parameters affect the point density in an intuitive manner, creating an optimal set of parameters is a tricky issue. For instance, if we want higher PPSM, then the increase of PRF might come as a first option. However, if PRF is simply increased, it will result in the increased across track density with unchanging along track density, which will cause uneven point distribution. It is obvious that numerous cases like this can be investigated for an optimal setting. All these multiple parameters need to be carefully adjusted to achieve desired evenly distributed point density.
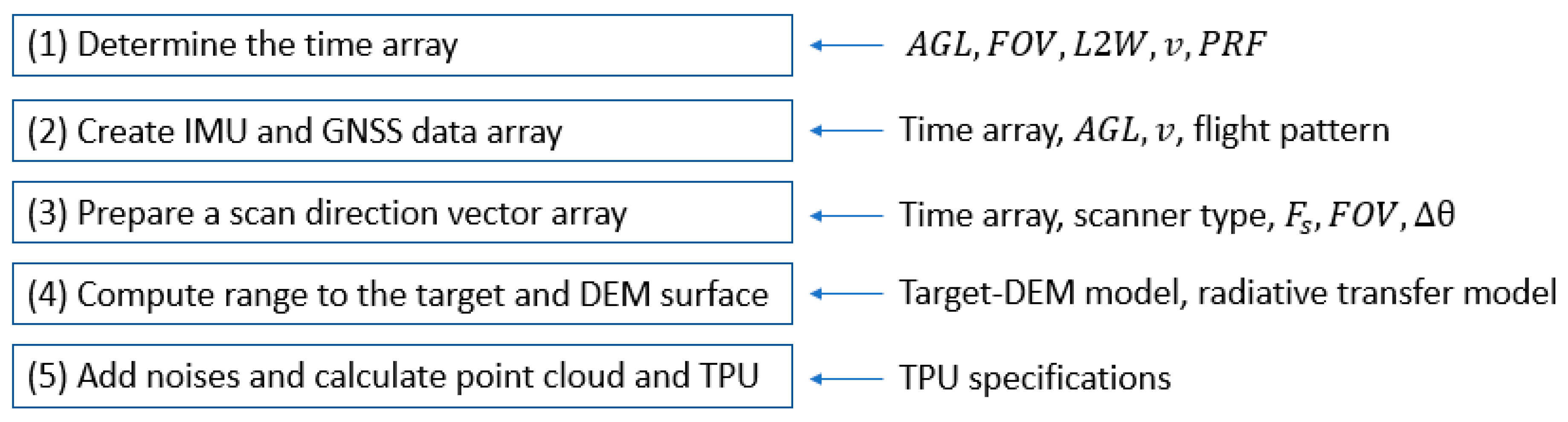
The airborne lidar simulation starts from determining the total number of pulses, because it is the foundation of the computation flow (
Figure 3). Using several related parameters, the
is determined and then it is multiplied by another input, the “Length to Width” ratio, which determines the flight distance. The distance divided by speed gives the flight time. Eventually the total number of pulses is obtained by the PRF times flight time.
The second step is to create an IMU and GNSS data array. Although any arbitrary IMU and GNSS position data can be generated, the practical strategy is to use a real SBET file (or other form of position and orientation data) and sample two sets of data out of a straight north flight segment:
and
. The data come in a low temporal resolution (e.g., SBET in 200 Hz). Thus, the time and (
R,
P,
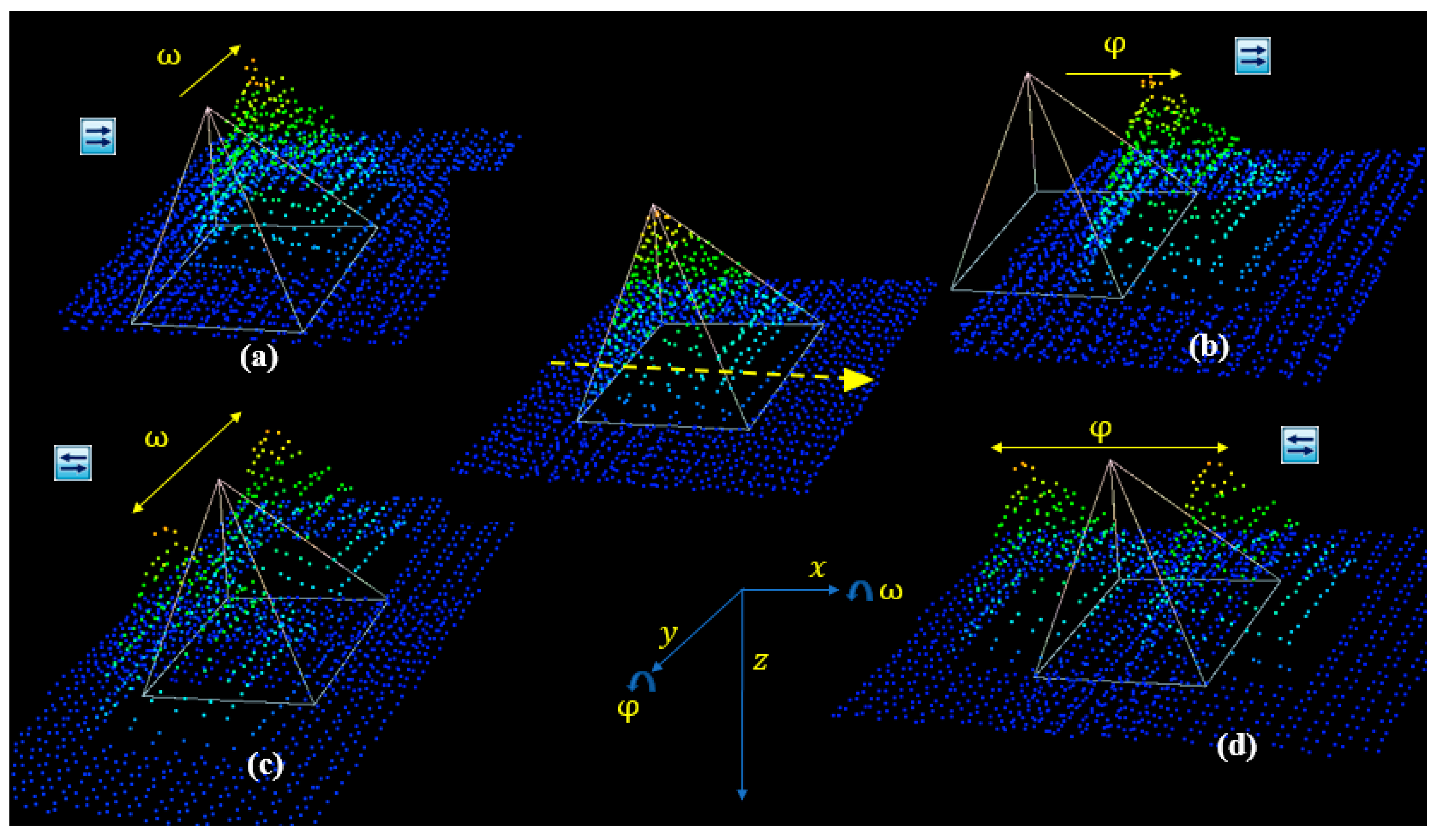
H) data need to be interpolated to match the high-resolution time array (usually hundreds of KHz) of the laser pulses. Several different flight patterns can be selected, including parallel, parallel opposite, cross, slant cross, etc. The following modifications in heading angles (
Figure 4) are needed to accommodate the flight pattern.
The point clouds in
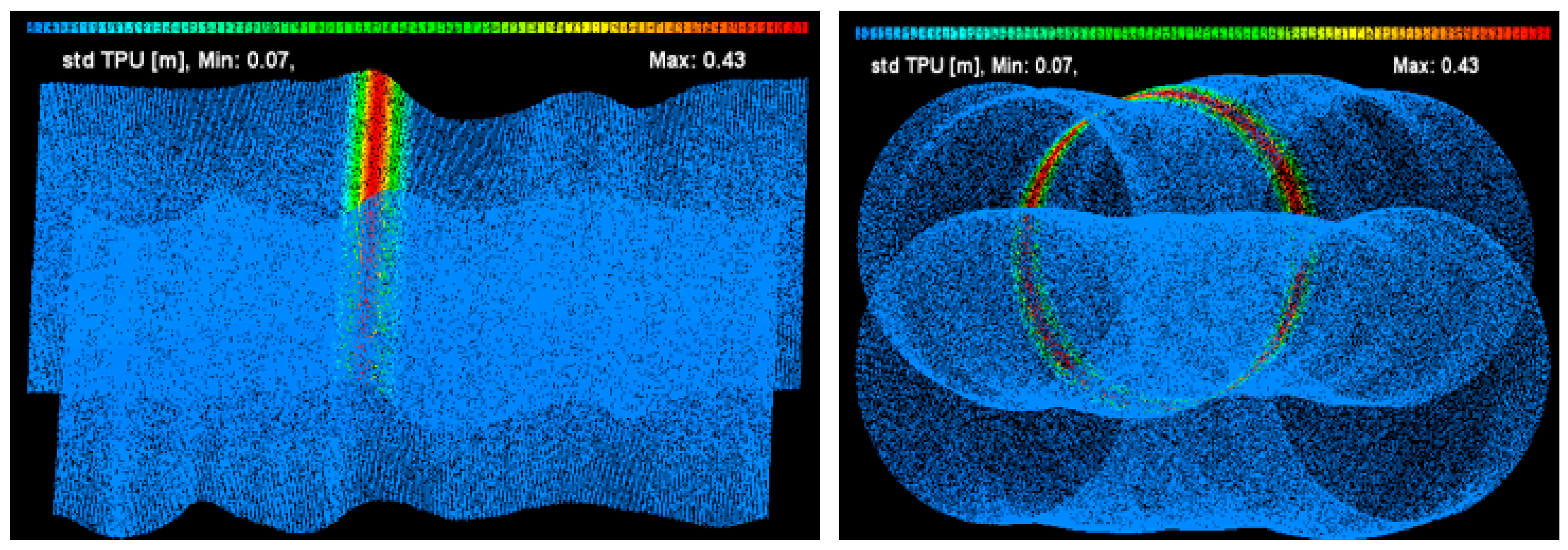
Figure 4 demonstrate the resultant swaths for two examples (cross pattern with circular scanner and slant-cross pattern with linear scanner).
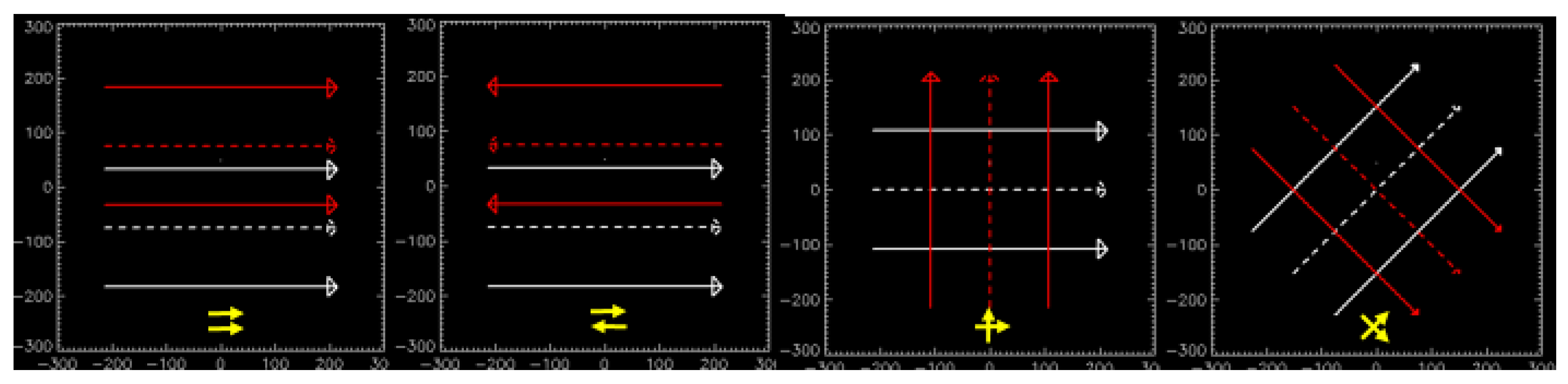
The GNSS position array is prepared for four preset flight patterns in
Figure 5, where the x-axis and y-axis represent ground coordinates in meters. The coordinates are prepared in LTF. The swath boundary of the two swaths is illustrated in red and white. The GNSS position corresponds to the dashed line located in the center of each swath. This illustration is based on a 30% swath overlap ratio.
The next step is to create a direction vector of the propagating pulse in the SBF. The scan angle (
θ) array is prepared first using scanner type,
, and the scan angle offset, (Δ
θ). Then the direction vector in SBF for the Galvo-mirror and circular scanner is given, respectively, as follows:
The final step is to estimate a range to the DEM surface. Unlike the active real lidar that measures the range, the simulator cannot measure the distance. The simulator can only estimate the range to the DEM surface by following the computation procedure described in the direct georeferencing section above, as follows: Starting from the direction vector in SBF →computing a position in SBF by introducing unknown range → transforming the SBF position into IBF position and translating by a lever-arm displacement → transforming the position in IBF into the position in LTF using (R, P, H) angles. The solution for the position where the laser pulse hits the target can be computed in two methods. One approach is the analytical solution when a specific geometry of the target yields a forward solution. The other approach is a generic optimization using DEM to get the range solution.
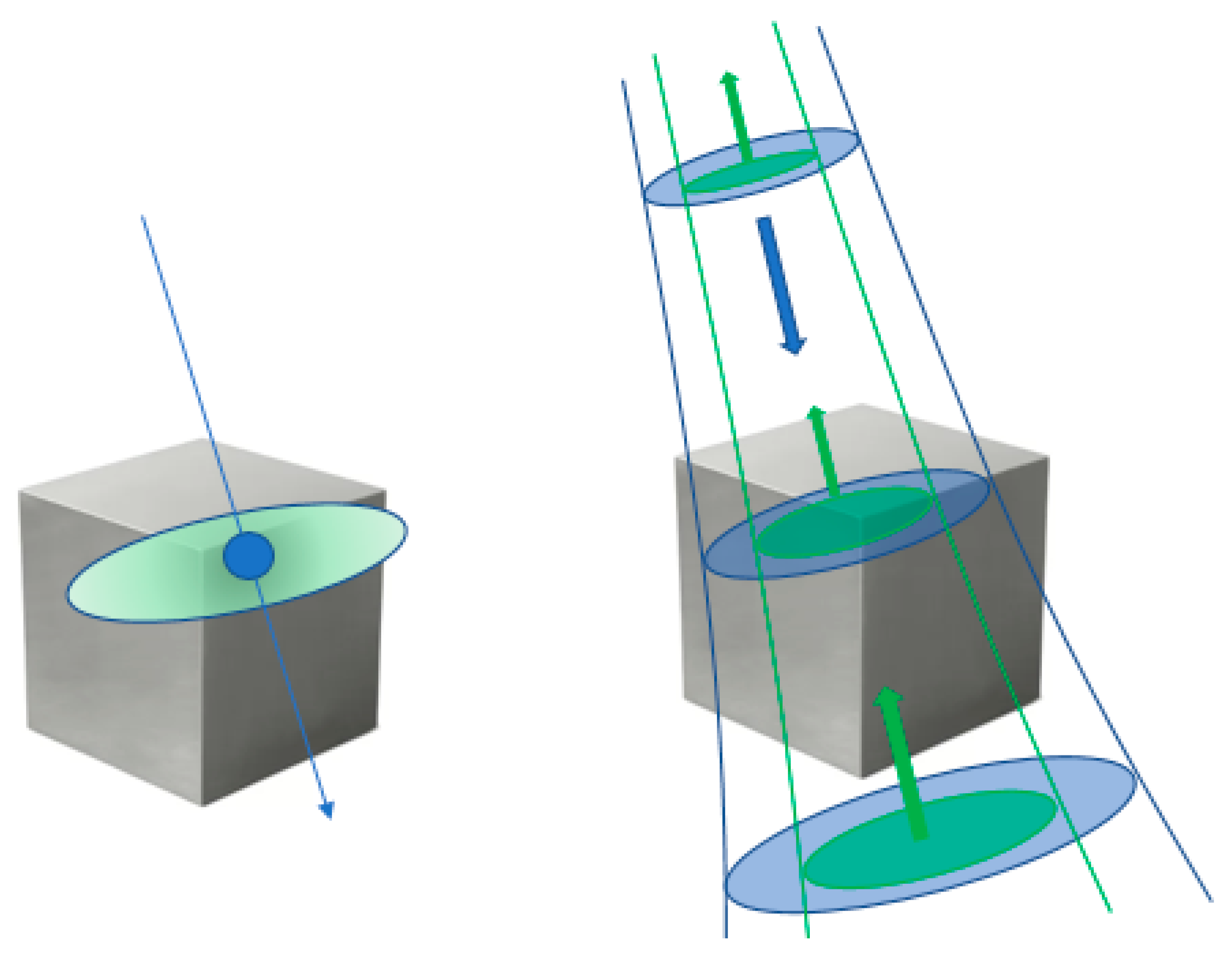
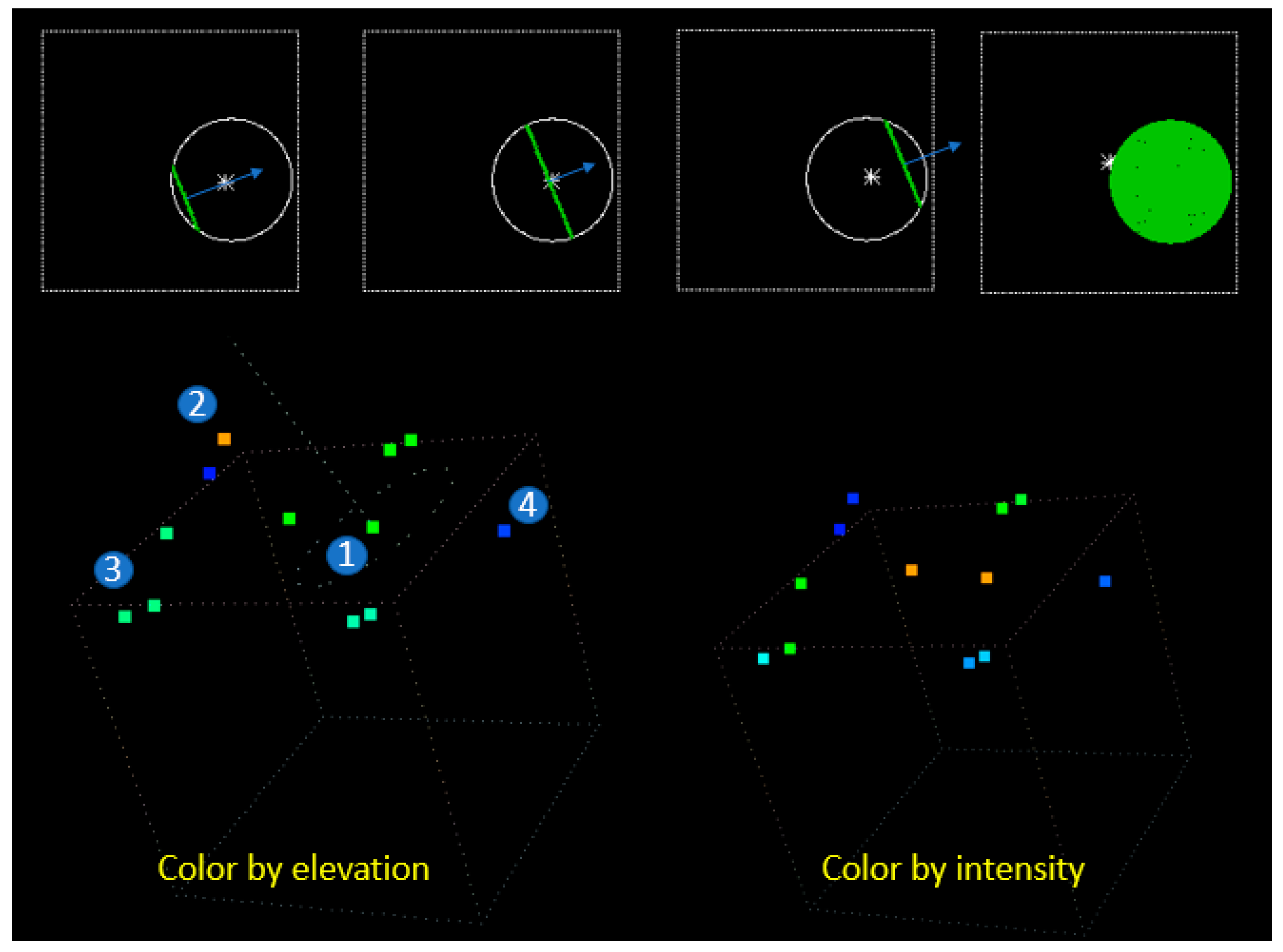
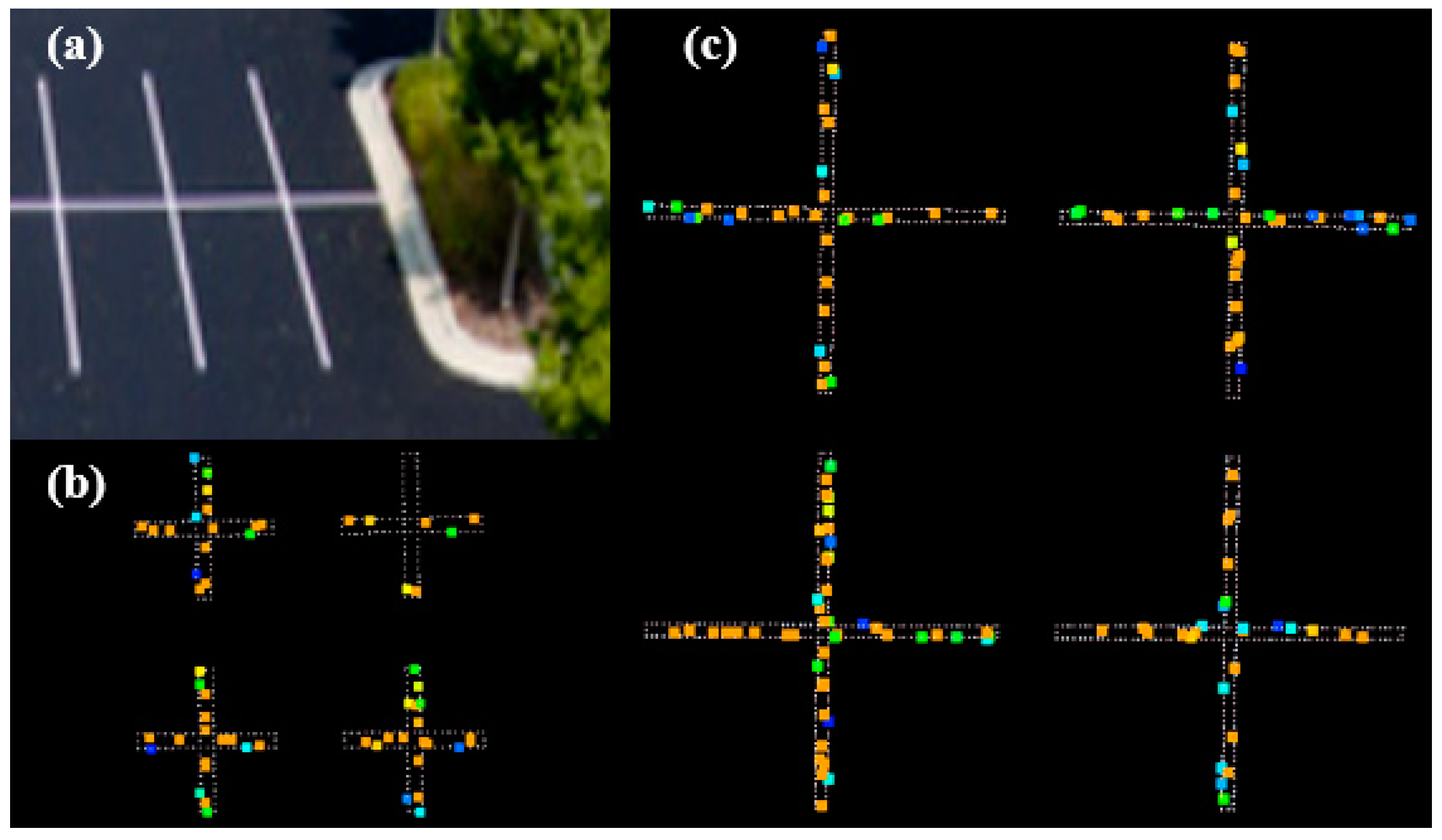
Once the beam center interaction point is obtained, it is refined into the waveform solution using the radiative transfer-based irradiance distribution described in the above section. Several examples are presented to demonstrate how the waveform-based solution is different compared to the simple georeferencing of the beam center. The example shown in
Figure 6 uses a cube and a beam spot size comparable to the cube dimension, which creates a non-negligible interaction effect. The upper panel in
Figure 6 illustrates a sequence of interaction lines between the delta-pulse and the cube surface along the arrow direction. As pulse 1 propagates downward and a little toward the right side, the interaction line touches down on the left beam edge first, and then the interaction line makes a transition to the right side to create a full circle interaction area. Thus, the z-coordinate of the lidar point is exactly the altitude of the cube top surface, which is shown in the P1 waveform in
Figure 7.
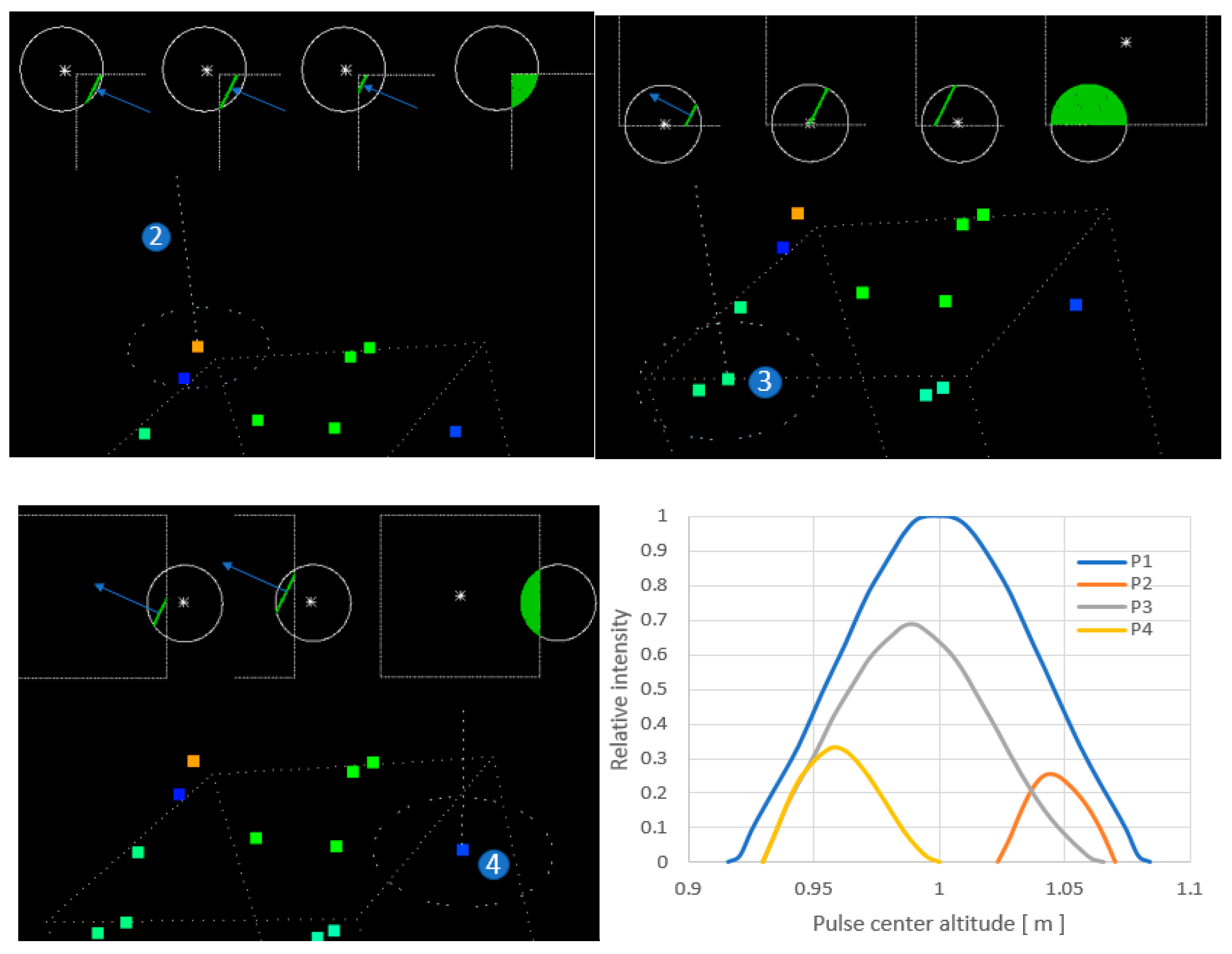
The estimated relative reflected energy of the pulse and the pulse center altitude for each point are as follows: 1.0 (1.0 m) for point 1, 0.08 (1.043 m) for point 2, 0.54 (0.990 m) for point 3, and 0.14 (0.957 m) for point 4.
Pulse 2 hits the upper-left edge as it is moving in a westerly downward direction. Thus, it hits on the right edge of the beam circle first and makes a transition toward the left. As it hits the small area of the corner, the interaction area is a small wedge giving only 8% of the relative energy, which means the total reflected energy, by integrating the low intensity, waveform is about 8%, compared to the full circle interaction of point 1. Additionally, the computed altitude is 4.3 cm higher than the cube surface because the short duration of the interaction occurs when the beam center is still above the surface before moving down to the cube surface level. The rest of the interpretation can be understood in a similar manner. Point 3 interacts in the upper half circle area, resulting in 54% of relative energy, and the computed altitude is about 1 cm below the surface. The point 4 beam propagates in a westerly downward direction, making the first hit at the bottom edge of the small arc of the circle. The whole interaction area is a small arc area resulting in a relative intensity of only 14%. Considering the interaction position is the left arc of the circle, the center of the beam is already lower than the top surface. That is why the altitude (z-component) of the computed lidar point position is 95.7 cm, which is lower than the cube top altitude of 1 m. This means the computed lidar point is suspended in air at 4.3 cm lower than the top surface. In fact, the laser pulse reflection occurs exactly on the surface, which is at a 1 m altitude. However, the waveform modeling simulates the pulse-target interaction accurately and simulates the situation that a real lidar system experiences.
A lidar system detects a waveform peak, but it has no idea on exactly which part of the cross-sectional area of a beam the light reflection occurs. Thus, it assumes that the interaction occurs at the beam center. Obviously, this error occurs because the radiative transfer and waveform-based rigorous computation approach is used. However, this error is exactly what must be simulated. As a result, the target will have slightly larger apparent dimension; in other words, a target enlargement effect. If the simple georeferencing was used, the cube hit position will be on the side wall of the cube, which does not happen in a real lidar system. Of course, if the beam divergence is very small and the sensor AGL is low, the target enlargement effect will be minimized accordingly. Finally, the simulator computes TPU according to the equations described above.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}