Predicting the Loose Zone of Roadway Surrounding Rock Using Wavelet Relevance Vector Machine

Abstract
1. Introduction
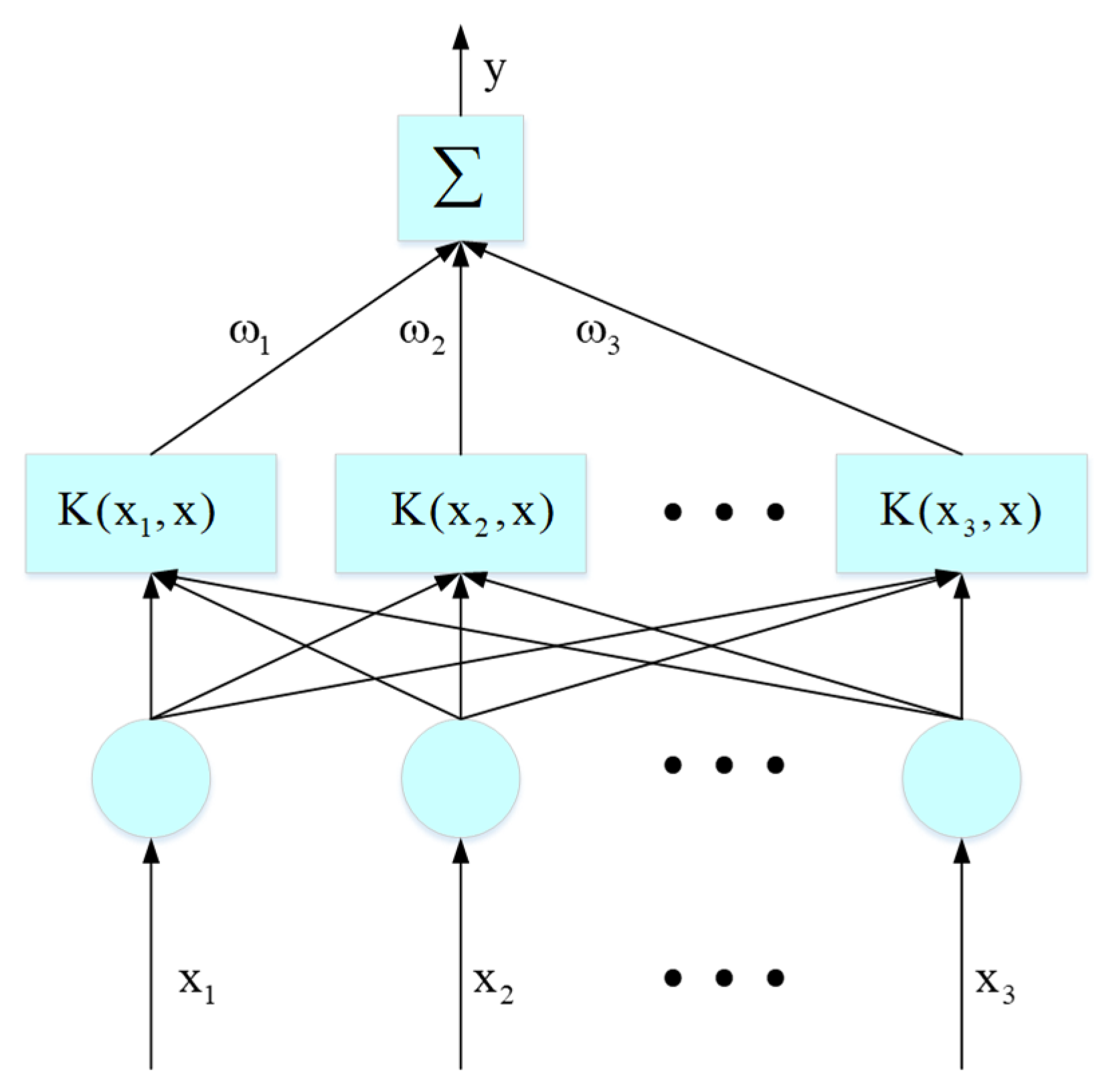
2. Wavelet Relevance Vector Machine
2.1. Relevant Vector Machine
- .
2.2. Wavelet Kernel Function
2.3. Wavelet Relevance Vector Machine
2.4. Fitting Quality Estimation
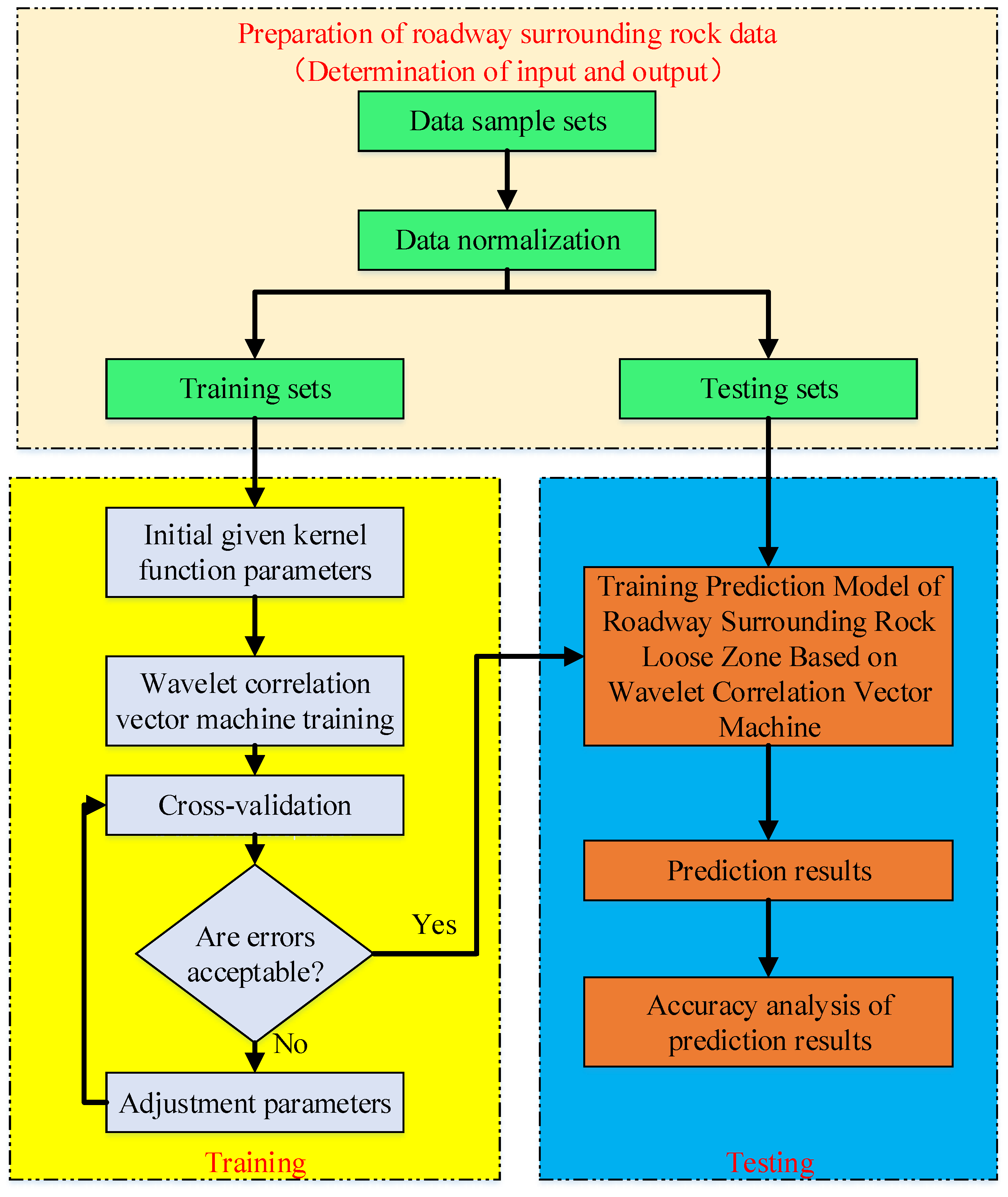
3. Establishment of Predictive Model for Loose Zone of Surrounding Rock in Roadway
4. Application Analysis
4.1. Selection of Main Influencing Factors
4.2. Sample Selection
4.3. Kernel Function Parameter Determination
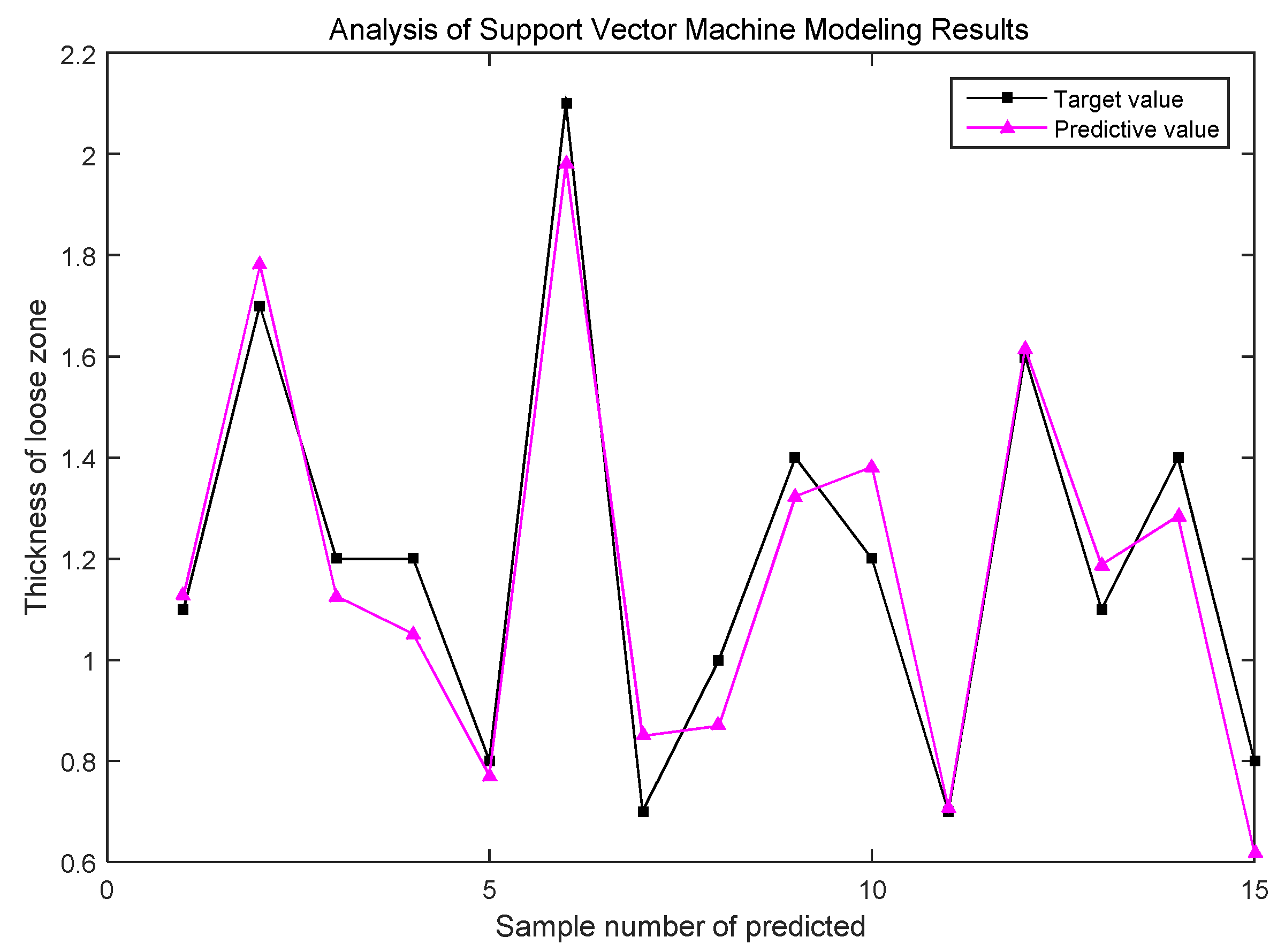
4.4. Result Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, R.; Deng, X.H.; Meng, Y.Y.; Yuan, D.Y.; Xia, D.H. Case Study of Modified H–B Strength Criterion in Discrimination of Surrounding Rock Loose Circle. KSCE J. Civ. Eng. 2019, 23, 1395–1406. [Google Scholar] [CrossRef]
- Li, F.; Quan, X.; Jia, Y.; Wang, B.; Zhang, G.; Chen, S. The experimental study of the temperature effect on the interfacial properties of fully grouted rock bolt. Appl. Sci. 2017, 7, 327. [Google Scholar] [CrossRef]
- Luo, M.; Li, W.; Wang, B.; Fu, Q.; Song, G. Measurement of the length of installed rock bolt based on stress wave reflection by using a giant magneto strictive (GMS) actuator and a PZT sensor. Sensors 2017, 17, 444. [Google Scholar] [CrossRef] [PubMed]
- Ho, S.C.M.; Li, W.; Wang, B.; Song, G. A load measuring anchor plate for rock bolt using fiber optic sensor. Smart Mater. Struct. 2017, 26, 057003. [Google Scholar] [CrossRef]
- Wang, B.; Huo, L.; Chen, D.; Li, W.; Song, G. Impedance-based pre-stress monitoring of rock bolts using a piezoceramic-based smart washer—A feasibility study. Sensors 2017, 17, 250. [Google Scholar] [CrossRef]
- Lu, A.; Xu, J.; Liu, H. Effect of a preload force on anchor system frequency. Int. J. Min. Sci. Technol. 2013, 23, 135–138. [Google Scholar] [CrossRef]
- Huo, L.; Wang, B.; Chen, D.; Song, G. Monitoring of pre-load on rock bolt using piezoceramic-transducer enabled time reversal method. Sensors 2017, 17, 2467. [Google Scholar] [CrossRef]
- Kong, Q.; Zhu, J.; Ho, S.C.M.; Song, G. Tapping and listening: A new approach to bolt looseness monitoring. Smart Mater. Struct. 2018, 27, 07LT02. [Google Scholar] [CrossRef]
- Jiang, S.H.; Li, D.Q.; Zhang, L.M.; Zhou, C.B. Time-dependent system reliability of anchored rock slopes considering rock bolt corrosion effect. Eng. Geol. 2014, 175, 1–8. [Google Scholar] [CrossRef]
- Peng, J.; Hu, S.; Zhang, J.; Cai, C.S.; Li, L.Y. Influence of cracks on chloride diffusivity in concrete: A five-phase mesoscale model approach. Constr. Build. Mater. 2019, 197, 587–596. [Google Scholar] [CrossRef]
- Vandermaat, D.; Saydam, S.; Hagan, P.C.; Crosky, A.G. Examination of rock bolt stress corrosion cracking utilizing full size rock bolts in a controlled mine environment. Int. J. Rock Mech. Min. Sci. 2016, 81, 86–95. [Google Scholar] [CrossRef]
- Craig, P.; Serkan, S.; Hagan, P.; Hebblewhite, B.; Vandermaat, D.; Crosky, A.; Elias, E. Investigations into the corrosive environments contributing to premature failure of Australian coal mine rock bolts. Int. J. Min. Sci. Technol. 2016, 26, 59–64. [Google Scholar] [CrossRef]
- Guo, X.F.; Zhao, Z.Q.; Gao, X.; Wu, X.Y.; Ma, N.J. Analytical solutions for characteristic radii of circular roadway surrounding rock plastic zone and their application. Int. J. Min. Sci. Technol. 2018, 29, 263–272. [Google Scholar] [CrossRef]
- Hao, Z.Y.; Lin, B.Q.; Gao, Y.B.; Cheng, Y.Y. Establishment and application of drilling sealing model in the spherical grouting mode based on the loosing-circle theory. Int. J. Min. Sci. Technol. 2012, 22, 895–898. [Google Scholar] [CrossRef]
- Liu, Y.; Ye, Y.C.; Wang, Q.H.; Liu, X.Y. Stability Prediction Model of Roadway Surrounding Rock Based on Concept Lattice Reduction and a Symmetric Alpha Stable Distribution Probability Neural Network. Appl. Sci. 2018, 8, 2164. [Google Scholar] [CrossRef]
- Song, G.; Li, W.; Wang, B.; Ho, S.C.M. A review of rock bolt monitoring using smart sensors. Sensors 2017, 17, 776. [Google Scholar] [CrossRef]
- Song, G.; Wang, C.; Wang, B. Structural health monitoring (SHM) of civil structures. Appl. Sci. 2017, 7, 789. [Google Scholar] [CrossRef]
- Kong, Q.; Robert, R.H.; Silva, P.; Mo, Y.L. Cyclic crack monitoring of a reinforced concrete column under simulated pseudo-dynamic loading using piezoceramic-based smart aggregates. Appl. Sci. 2016, 6, 341. [Google Scholar] [CrossRef]
- Yi, C.; Lv, Y.; Xiao, H.; Huang, T.; You, G. Multisensory signal denoising based on matching synchro squeezing wavelet transform for mechanical fault condition assessment. Meas. Sci. Technol. 2018, 29, 045104. [Google Scholar] [CrossRef]
- Huang, Y.; Kou, J.S.; Fang, H.B.; Li, M.L.; Liang, Y. Research on Determination Loose Zone of Surrounding Rock in Highway Tunnel. Appl. Mech. Mater. 2015, 724, 185–191. [Google Scholar] [CrossRef]
- Cui, F.Z.; Xue, H.J.; He, T.Y.; Li, T.T.; Zuo, J.J.; Guan, X. Research on Loose Circle Test of Deep Broken Roadway. Appl. Mech. Mater. 2014, 638, 904–907. [Google Scholar] [CrossRef]
- Wang, F.; Liu, Z.; An, C. Sonic wave testing technique for surrounding rock loose circle. In Proceedings of the International Conference on Multimedia Technology, Hangzhou, China, 26–28 July 2011. [Google Scholar]
- Xia, H.B.; Xu, Y.; Zhang, Y.J. Numerical Simulation and Experimental Analysis of Roadway Surrounding; Rock Loose Circle under Blasting Vibration. In Proceedings of the Fourth International Conference on Digital Manufacturing & Automation, Qingdao, China, 29–30 June 2013. [Google Scholar]
- Ming, X.; Yongxing, Z.; Ke, Y. Prediction of limit bearing capacity of bolt using artificial neural networks. Chinese. J. Rock Mech. Eng. 2002, 21, 755–758. [Google Scholar]
- Wang, H.; Song, G. Innovative NARX recurrent neural network model for ultra-thin shape memory alloy wire. Neurocomputing 2014, 134, 289–295. [Google Scholar] [CrossRef]
- Mai, H.; Song, G.; Liao, X. Adaptive online inverse control of a shape memory alloy wire actuator using a dynamic neural network. Smart Mater. Struct. 2012, 22, 015001. [Google Scholar] [CrossRef]
- Wang, B.; Mo, C.; He, C.; Yan, Q. Fuzzy synthetic evaluation of the long-term health of tunnel structures. Appl. Sci. 2017, 7, 203. [Google Scholar] [CrossRef]
- Li, L.; Song, G.; Ou, J. Adaptive fuzzy sliding mode based active vibration control of a smart beam with mass uncertainty. Struct. Control Health Monitor. 2011, 18, 40–52. [Google Scholar] [CrossRef]
- Gu, H.; Song, G.; Malki, H. Chattering-free fuzzy adaptive robust sliding-mode vibration control of a smart flexible beam. Smart Mater. Struct. 2008, 17, 035007. [Google Scholar] [CrossRef]
- Vardakos, S.; Gutierrez, M.; Xia, C. Parameter identification in numerical modeling of tunneling using the Differential Evolution Genetic Algorithm (DEGA). Tunn. Undergr. Space Technol. 2012, 28, 109–123. [Google Scholar] [CrossRef]
- Luyu, L.; Song, G.; Jinping, O. A Genetic Algorithm-based Two-phase Design for Optimal Placement of Semi-active Dampers for Nonlinear Benchmark Structure. J. Vib. Control 2010, 16, 1379–1392. [Google Scholar]
- Yang, W.; Kong, Q.; Ho, S.C.M.; Mo, Y.L.; Song, G. Real-Time Monitoring of Soil Compaction Using Piezoceramic-Based Embeddable Transducers and Wavelet Packet Analysis. IEEE Access 2018, 6, 5208–5214. [Google Scholar] [CrossRef]
- Jiang, T.; Kong, Q.; Patil, D.; Luo, Z.; Huo, L.; Song, G. Detection of debonding between fiber reinforced polymer bar and concrete structure using piezoceramic transducers and wavelet packet analysis. IEEE Sens. J. 2017, 17, 1992–1998. [Google Scholar] [CrossRef]
- Lee, I.M.; Han, S.I.; Kim, H.J.; Yu, J.D.; Min, B.K.; Lee, J.S. Evaluation of rock bolt integrity using Fourier and wavelet transforms. Tunn. Undergr. Space Technol. 2012, 28, 304–314. [Google Scholar] [CrossRef]
- Zhao, H.; Li, S.; Ru, Z. Adaptive reliability analysis based on a support vector machine and its application to rock engineering. Appl. Math. Model. 2017, 44, 508–522. [Google Scholar] [CrossRef]
- Zhao, X.; Li, W.; Zhou, L.; Song, G.; Ba, Q.; Ho, S.C.M.; Ou, J. Application of support vector machine for pattern classification of active thermometry-based pipeline scour monitoring. Struct. Control Health Monit. 2015, 22, 903–918. [Google Scholar] [CrossRef]
- Li, S.; Zhao, H.; Ru, Z.; Sun, Q. Probabilistic back analysis based on Bayesian and multi-output support vector machine for a high cut rock slope. Eng. Geol. 2016, 203, 178–190. [Google Scholar] [CrossRef]
- Singh, T.N.; Verma, A.K. Comparative analysis of intelligent algorithms to correlate strength and petrographic properties of some schistose rocks. Eng. Comput. 2012, 28, 1–12. [Google Scholar] [CrossRef]
- Liu, C.; Zhou, D.; Wang, Z.; Yang, D.; Song, G. Damage Detection of Refractory Based on Principle Component Analysis and Gaussian Mixture Model. Complexity 2018. [Google Scholar] [CrossRef]
- Yi, T.H.; Li, H.N.; Song, G.; Zhang, X.D. Optimal sensor placement for health monitoring of high-rise structure using adaptive monkey algorithm. Struct. Control Health Monit. 2015, 22, 667–681. [Google Scholar] [CrossRef]
- Zhou, J.; Li, X.B. Evaluating the Thickness of Broken Rock Zone for Deep Roadways using Nonlinear SVMs and Multiple Linear Regression Model. Procedia Eng. 2011, 26, 972–981. [Google Scholar] [CrossRef][Green Version]
- Mehrotra, H.; Singh, R.; Vatsa, M.; Majhi, B. Incremental granular relevance vector machine: A case study in multimodal biometrics. Pattern Recognit. 2016, 56, 63–76. [Google Scholar] [CrossRef]
- He, S.M.; Xiao, L.; Wang, Y.L.; Liu, X.G.; Yang, C.H.; Lu, J.G.; Gui, W.H.; Sun, Y.X. A novel fault diagnosis method based on optimal relevance vector machine. Neurocomputing 2017, 267, 651–663. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, P.F.; Ding, K. Pattern recognition using relevant vector machine in optical fiber vibration sensing system. Appl. Soft Comput. 2019, 7, 5886–5895. [Google Scholar] [CrossRef]
- Habeeb, A.; Jale, T. Relevance vector machines modeling of nonstationary ground motion coherency. Soil Dyn. Earthq. Eng. 2019, 120, 262–272. [Google Scholar]
- Samagassi, S.; Khamlichi, A.; Driouach, A.; Jacquelin, E. Reconstruction of multiple impact forces by wavelet relevance vector machine approach. J. Sound Vib. 2015, 359, 56–67. [Google Scholar] [CrossRef]
- Tipping, M.E. The relevance Vector Machine. Adv. Neural Inf. Process. Syst. 2000, 12, 652–658. [Google Scholar]
- Tipping, M.E. Sparse Bayesian learning and the relevance vector machine. J. Mach. Learn. Res. 2001, 3, 211–244. [Google Scholar]
- He, F.; Xu, J.W.; Li, M.; Yang, J.H. Product quality modelling and prediction based on wavelet relevance vector machines. Chemom. Intell. Lab. Syst. 2013, 121, 33–41. [Google Scholar]
- Wang, F.; Gou, B.; Qin, Y. Modeling tunneling-induced ground surface settlement development using a wavelet smooth relevance vector machine. Comput. Geotech. 2013, 54, 125–132. [Google Scholar] [CrossRef]
- Schölkopf, B. Learning with Kernels: Support Vector Machines, Regularization, Optimization, and Beyond; The MIT Press: London, UK, 2001. [Google Scholar]
- Li, D.; Liang, Y.; Feng, Q.; Song, G. Load monitoring of the pin-connected structure based on wavelet packet analysis using piezoceramic transducers. Measurement 2018, 122, 638–647. [Google Scholar] [CrossRef]
- Xu, B.; Li, B.; Song, G. Active Debonding Detection for Large Rectangular CFSTs Based on Wavelet Packet Energy Spectrum with Piezoceramics. ASCE J. Struct. Eng. 2013, 139, 1435–1443. [Google Scholar] [CrossRef]
- Zhang, L.; Zhou, W.D.; Jiao, L.C. Wavelet support vector machine. IEEE Trans. Syst. Man Cybern Part B 2004, 34, 34. [Google Scholar] [CrossRef]
- Xu, Y.; Luo, M.; Li, T.; Song, G. ECG Signal De-noising and Baseline Wander Correction Based on CEEMDAN and Wavelet Threshold. Sensors 2017, 17, 2754. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.C.G.; Dudek, G. Auto-correlation wavelet support vector machine and its applications to regression. In Proceedings of the 2nd Canadian Conference on Computer and Robot Vision, Victoria, BC, Canada, 9–11 May 2005. [Google Scholar]
- Dimitris, T.; Aristidis, L.; Nikolaos, G. Incremental relevance vector machine with kernel learning. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2008; pp. 301–312. [Google Scholar]
- Yuan, J.; Bo, L.F.; Wang, K. Adaptive spherical Gaussian kernel in sparse Bayesian learning framework for nonlinear regression. Expert Syst. Appl. 2009, 36, 3982–3989. [Google Scholar] [CrossRef]
- Candela, J.Q. Learning with Uncertainty Gaussian Processes and Relevance Vector Machines. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2004. [Google Scholar]
- Yuan, J.; Wang, K.S.; Yu, T.; Fang, M.L. Integrating relevance vector machines and genetic algorithms for optimization of seed-separating process. Eng. Appl. Artif. Intell. 2007, 20, 970–979. [Google Scholar] [CrossRef]
- Nikolaev, N.; Tino, P. Sequential relevance vector machine learning from time series. In Proceedings of the International Joint Conference on Neural Networks, Montreal, QC, Canada, 31 July–4 August 2005; pp. 1303–1313. [Google Scholar]
- Kim, K.; Lee, J.M.; Lee, I.B. A novel multivariate regression approach based on kernel partial least squares with orthogonal signal correction. Chemom. Intell. Lab. Syst. 2005, 79, 22–30. [Google Scholar] [CrossRef]
- Xu, L.; Fu, H.Y.; Goodarzi, M.; Cai, C.B.; Yin, Q.B.; Wu, Y.; Tang, B.C.; She, Y.B. Stochastic cross validation. Chemom. Intell. Lab. Syst. 2018, 175, 74–81. [Google Scholar] [CrossRef]
- Zhang, P.; Wang, Y.; Qin, G. Fuzzy Damage Analysis of the Seismic Response of a Long-Distance Pipeline under a Coupling Multi-Influence Domain. Energies 2019, 12, 62. [Google Scholar] [CrossRef]
- Qiu, D.H.; Li, S.C.; Zhang, L.W.; Xue, Y.G. Application of GA-SVM in classification of surrounding rock based on model reliability examination. Min. Sci. Technol. 2010, 20, 428–433. [Google Scholar] [CrossRef]
- Shi, S.S.; Li, S.C.; Li, L.P.; Zhou, Z.Q.; Wang, J. Advance optimized classification and application of surrounding rock based on fuzzy analytic hierarchy process and Tunnel Seismic Prediction. Autom. Constr. 2014, 37, 217–222. [Google Scholar] [CrossRef]
- Zhu, Z.J.; Zhang, H.W.; Chen, Y. Prediction model of loosening zones around roadway based on MPSOSVM. Comput. Eng. Appl. 2014, 50, 1–5. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | Input | Output | ||||
|---|---|---|---|---|---|---|
| Depth (m) | Span/(m) | Sectional Area (m²) | Strength (Mpa) | Development Degree | Thickness (m) | |
| 1 | 362 | 2.6 | 6.8 | 62.4 | 2 | 0.6 |
| 2 | 660 | 4.4 | 14.6 | 12.5 | 5 | 2.2 |
| 3 | 384 | 3.5 | 11.5 | 8.5 | 3 | 1.2 |
| 4 | 150 | 3.6 | 11.7 | 14.6 | 2 | 0.6 |
| 5 | 178 | 2.6 | 6.4 | 23.8 | 3 | 1.2 |
| 6 | 510 | 3.2 | 7.3 | 12.6 | 4 | 1.6 |
| 7 | 420 | 3.6 | 10.3 | 14.3 | 3 | 1.1 |
| 8 | 450 | 3.4 | 7.8 | 9.1 | 5 | 2 |
| 9 | 236 | 3 | 7.5 | 14.3 | 3 | 1.2 |
| 10 | 470 | 4 | 12.6 | 10.1 | 5 | 2.2 |
| 11 | 467 | 3.4 | 9.6 | 10.1 | 4 | 1.8 |
| 12 | 490 | 3.7 | 8.9 | 12.5 | 4 | 1.5 |
| 13 | 450 | 3.6 | 10.8 | 13.3 | 4 | 1.6 |
| 14 | 244 | 3.4 | 8.2 | 11.2 | 3 | 1 |
| 15 | 460 | 3.2 | 9.7 | 101.6 | 1 | 0.4 |
| 16 | 373 | 2.5 | 6.3 | 14.6 | 2 | 0.9 |
| 17 | 310 | 2.8 | 7.1 | 13.8 | 3 | 1.2 |
| 18 | 125 | 2.8 | 7.1 | 13.3 | 2 | 0.7 |
| 19 | 392 | 2.8 | 6.9 | 14.5 | 2 | 0.8 |
| 20 | 249 | 3.4 | 8.2 | 16.8 | 3 | 1 |
| 21 | 140 | 3.6 | 10.3 | 13.4 | 2 | 0.5 |
| 22 | 345 | 3 | 7.6 | 65 | 2 | 0.7 |
| 23 | 315 | 2.8 | 7.1 | 11.2 | 3 | 1.1 |
| 24 | 550 | 3.4 | 9.4 | 12.5 | 5 | 2.1 |
| 25 | 410 | 3.2 | 7.2 | 13.3 | 3 | 1.1 |
| 26 | 420 | 3.2 | 9.2 | 9.1 | 4 | 1.7 |
| 27 | 340 | 3.2 | 9.2 | 19.8 | 3 | 1.3 |
| 28 | 340 | 3.2 | 9.6 | 32.2 | 2 | 0.7 |
| 29 | 420 | 3.7 | 8.9 | 9.1 | 4 | 1.4 |
| 30 | 370 | 3.5 | 8.3 | 10.5 | 3 | 1 |
| 31 | 428 | 3.6 | 11.7 | 16.5 | 3 | 1.2 |
| 32 | 465 | 4 | 12.6 | 9.5 | 4 | 1.6 |
| 33 | 403 | 2.9 | 7.2 | 12.6 | 3 | 1.3 |
| 34 | 689 | 3 | 7.6 | 15.1 | 4 | 1.8 |
| 35 | 450 | 3 | 7.6 | 11.2 | 3 | 1.2 |
| 36 | 410 | 3.6 | 11.7 | 13.3 | 4 | 1.4 |
| 37 | 348 | 3.2 | 9.2 | 7.5 | 3 | 1.2 |
| 38 | 357 | 3.2 | 8.5 | 10.5 | 3 | 1.1 |
| 39 | 276 | 2.6 | 6.6 | 15.9 | 2 | 0.8 |
| 40 | 280 | 2.8 | 7.1 | 12.7 | 2 | 0.8 |
| 41 | 321 | 2.6 | 6.6 | 13.3 | 3 | 1.1 |
| 42 | 665 | 4.4 | 14.6 | 10.9 | 4 | 1.7 |
| 43 | 350 | 3.2 | 8.5 | 10.5 | 3 | 1.2 |
| 44 | 321 | 2.6 | 6.6 | 9.2 | 3 | 1.2 |
| 45 | 340 | 3 | 7.6 | 73.6 | 2 | 0.8 |
| 46 | 470 | 3.6 | 11.2 | 9.1 | 5 | 2.1 |
| 47 | 231 | 3 | 7.5 | 18.3 | 2 | 0.7 |
| 48 | 125 | 3.4 | 9.8 | 13.3 | 3 | 1 |
| 49 | 296 | 3.4 | 7.8 | 22.4 | 4 | 1.4 |
| 50 | 435 | 2.8 | 7.2 | 15.2 | 3 | 1.2 |
| 51 | 343 | 3.2 | 9.6 | 32.2 | 2 | 0.7 |
| 52 | 525 | 3.2 | 7.3 | 15.8 | 4 | 1.6 |
| 53 | 264 | 3.2 | 9.2 | 11.2 | 3 | 1.1 |
| 54 | 292 | 3.4 | 7.8 | 12.5 | 4 | 1.4 |
| 55 | 362 | 2.6 | 6.8 | 58 | 2 | 0.8 |
| Model | SVM | Gauss-RVM | Mexican-RVM | Morlet-RVM | DOG-RVM |
|---|---|---|---|---|---|
| RMS error | 0.1780 | 0.1025 | 0.1020 | 0.1021 | 0.0998 |
| Model | SVM | Gauss-RVM | Mexican-RVM | Morlet-RVM | DOG-RVM |
|---|---|---|---|---|---|
| Average relative prediction errors | 8.739% | 4.624% | 4.581% | 4.586% | 4.575% |
| Model | SVM | RVM | WRVM |
|---|---|---|---|
| Running time | 3.729 s | 1.435 s | 0.776 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Ye, Y.; Wang, Q.; Liu, X.; Wang, W. Predicting the Loose Zone of Roadway Surrounding Rock Using Wavelet Relevance Vector Machine. Appl. Sci. 2019, 9, 2064. https://doi.org/10.3390/app9102064
Liu Y, Ye Y, Wang Q, Liu X, Wang W. Predicting the Loose Zone of Roadway Surrounding Rock Using Wavelet Relevance Vector Machine. Applied Sciences. 2019; 9(10):2064. https://doi.org/10.3390/app9102064
Chicago/Turabian StyleLiu, Yang, Yicheng Ye, Qihu Wang, Xiaoyun Liu, and Weiqi Wang. 2019. "Predicting the Loose Zone of Roadway Surrounding Rock Using Wavelet Relevance Vector Machine" Applied Sciences 9, no. 10: 2064. https://doi.org/10.3390/app9102064
APA StyleLiu, Y., Ye, Y., Wang, Q., Liu, X., & Wang, W. (2019). Predicting the Loose Zone of Roadway Surrounding Rock Using Wavelet Relevance Vector Machine. Applied Sciences, 9(10), 2064. https://doi.org/10.3390/app9102064