1. Introduction
In the future, more than 200 billion devices will be connected to the cloud and each other in what is commonly called the Internet of Things (IoT) [
1]. Therefore, An IoT gateway that is a physical device or software program as the connection point between the cloud and controllers, sensors and intelligent devices plays important role. IoT gateway provides a place to preprocess the data located at the edge before sending it on to the cloud and supports communication between heterogeneous devices.
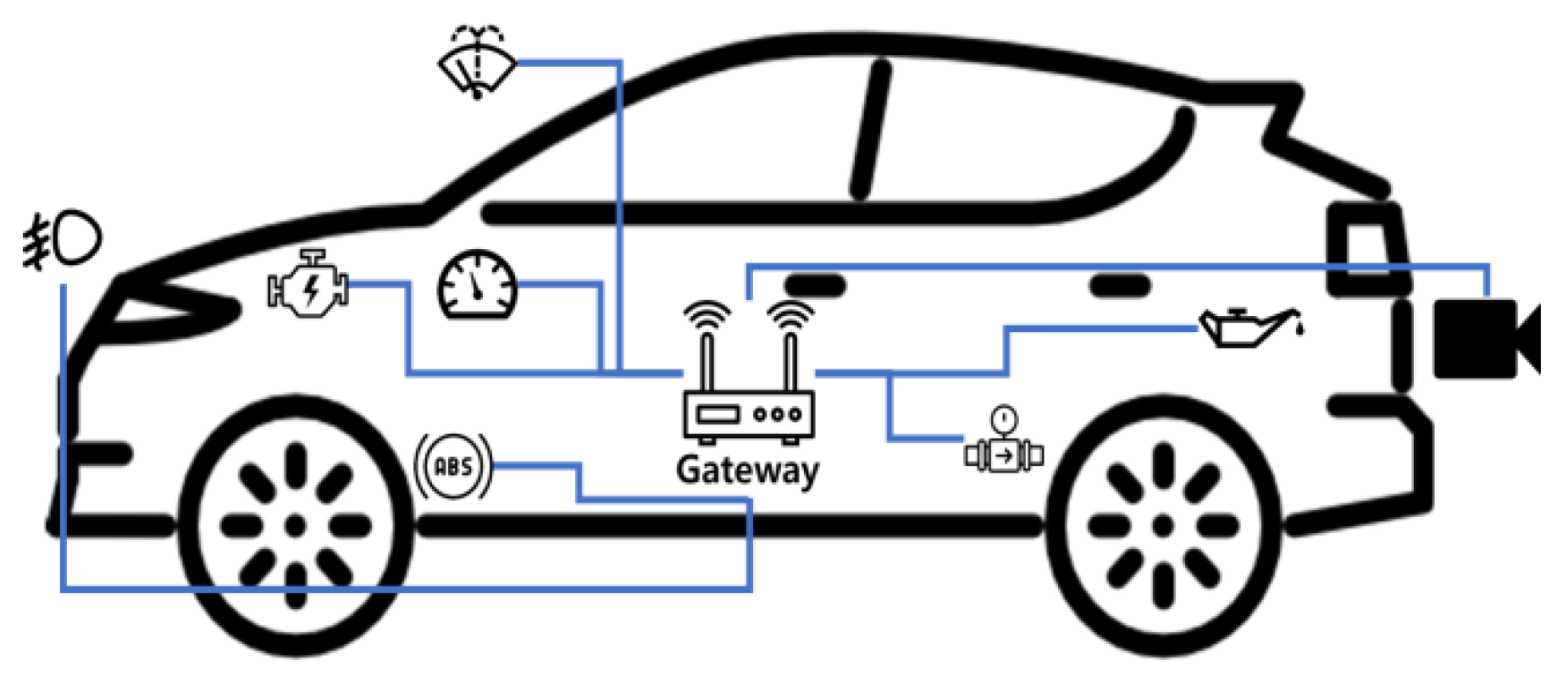
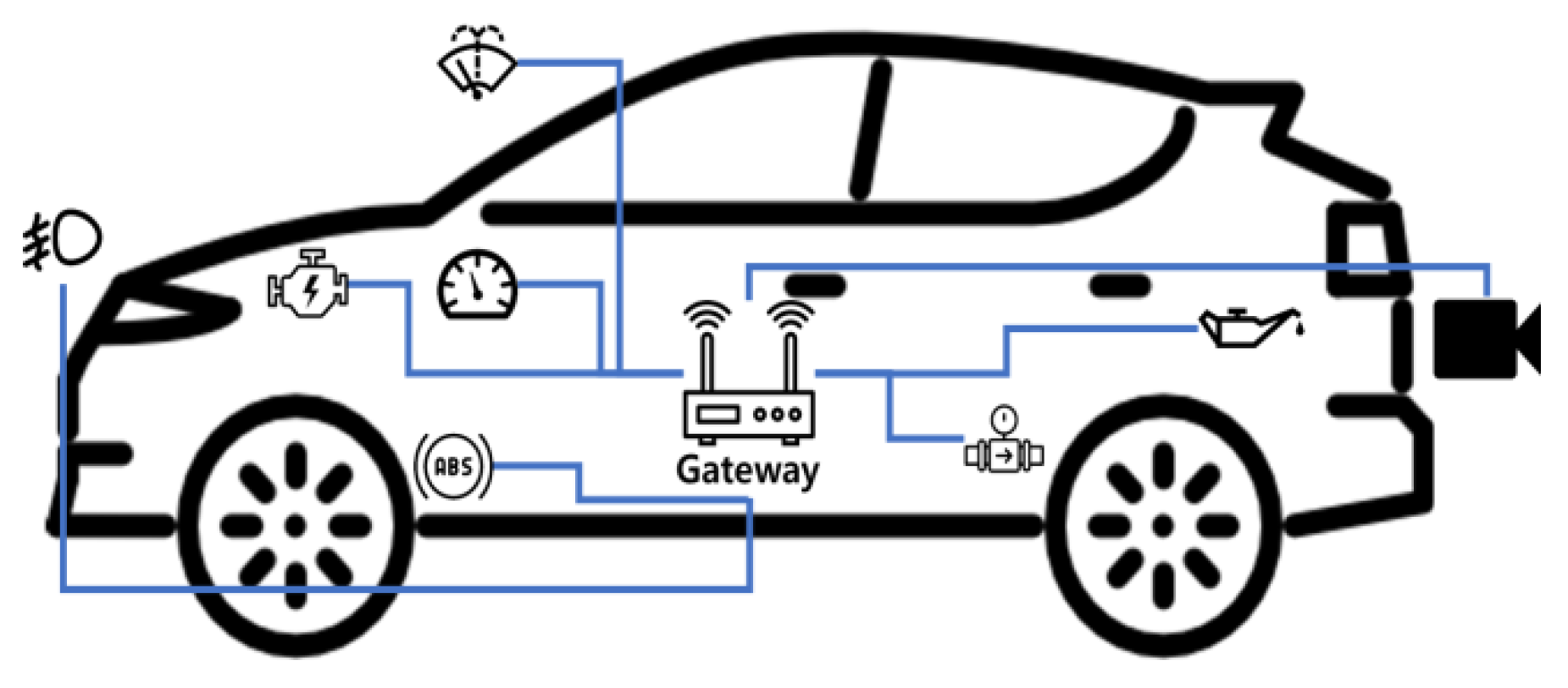
The gateways of connected cars, which are currently being developed, are similar to IoT gateways. As shown in
Figure 1, the connected car’s ECUs and Gateway need to handle many requirements, such as enhancing engine control and transmission control performance; securing stability through ABS, LDW, and FCW; and increasing convenience through camera and body control. To address these needs, the number of ECUs used in vehicles has increased dramatically and ECUs are connected to various protocols depending on their characteristics [
2].
To process such a large amount of data, various communication protocols such as FlexRay, MOST, CAN and Ethernet are used inside the vehicle. CAN, a low-speed (1 Mbps) communication protocol used in conventional in-vehicle communications, is used to process relatively less important vehicle control sensor data. FlexRay, a high-speed (10 Mbps) communication protocol, is mainly used to process control data of major parts of a vehicle. MOST and Ethernet have speeds up to 150 Mbps. MOST is a ring type network that processes multimedia data such as voice and video inside the vehicle, and Ethernet can be used as a backbone of in-vehicle network or as a V2X communication protocol.
To support these protocols, there have been various studies on the gateway inside the vehicle. However, gateways with minimum transmission delay only support some protocols such as CAN to FlexRay and MOST to CAN, and gateways that support communication for all protocols had increased transmission delay.
To support the four major protocols (i.e., CAN, FlexRay, MOST, and Ethernet) used for in-vehicle communications and to minimize the transmission delay of gateways, this paper proposes a Lightweight In-Vehicle Edge Gateway (LI-VEG) for the self-diagnosis of an autonomous vehicle. The LI-VEG receives the messages from the source sensor or actuator, translates the received messages into the format of a destination protocol, and transfers the translated messages to the destination ECU, sensor, or actuator, and the messages received from a source to the self-diagnosis module. Because the LI-VEG supports four major protocols, contrary to the existing vehicle gateway, it has good scalability and compatibility. In addition, The LI-VEG is indispensable to self-diagnosis module of an autonomous vehicle due to its rapidity and accuracy. A paper on the self-diagnosis module has already been published [
3], thus this paper only covers the LI-VEG, not the self-diagnosis.
The remainder of the paper is organized as follows. In
Section 2, related works are introduced. In
Section 3, the configuration and operation of LI-VEG are described. In
Section 4, the performance evaluation focuses in particular on the transmission delay and error rate for message transmission. Finally,
Section 5 presents the conclusions of the paper.
3. A Design of a Lightweight In-Vehicle Edge Gateway (LI-VEG) for the Self-Diagnosis of an Autonomous Vehicle
3.1. Overview
This paper proposes a Lightweight In-Vehicle Edge Gateway (LI-VEG) for the self-diagnosis of an autonomous vehicle, which supports the communication among FlexRay, CAN, Ethernet, and MOST protocols.
The LI-VEG enables mutual communication by translating the messages of the FlexRay, MOST, and CAN inside a vehicle into the message type of a destination protocol and translates the structure of an in-vehicle communication protocol into an Ethernet structure to support the mutual communication with the RSU outside a vehicle, and the connection with an Ethernet backbone. Because the paper on the self-diagnosis module has already been published [
38], this paper only covers LI-VEG, not the self-diagnosis.
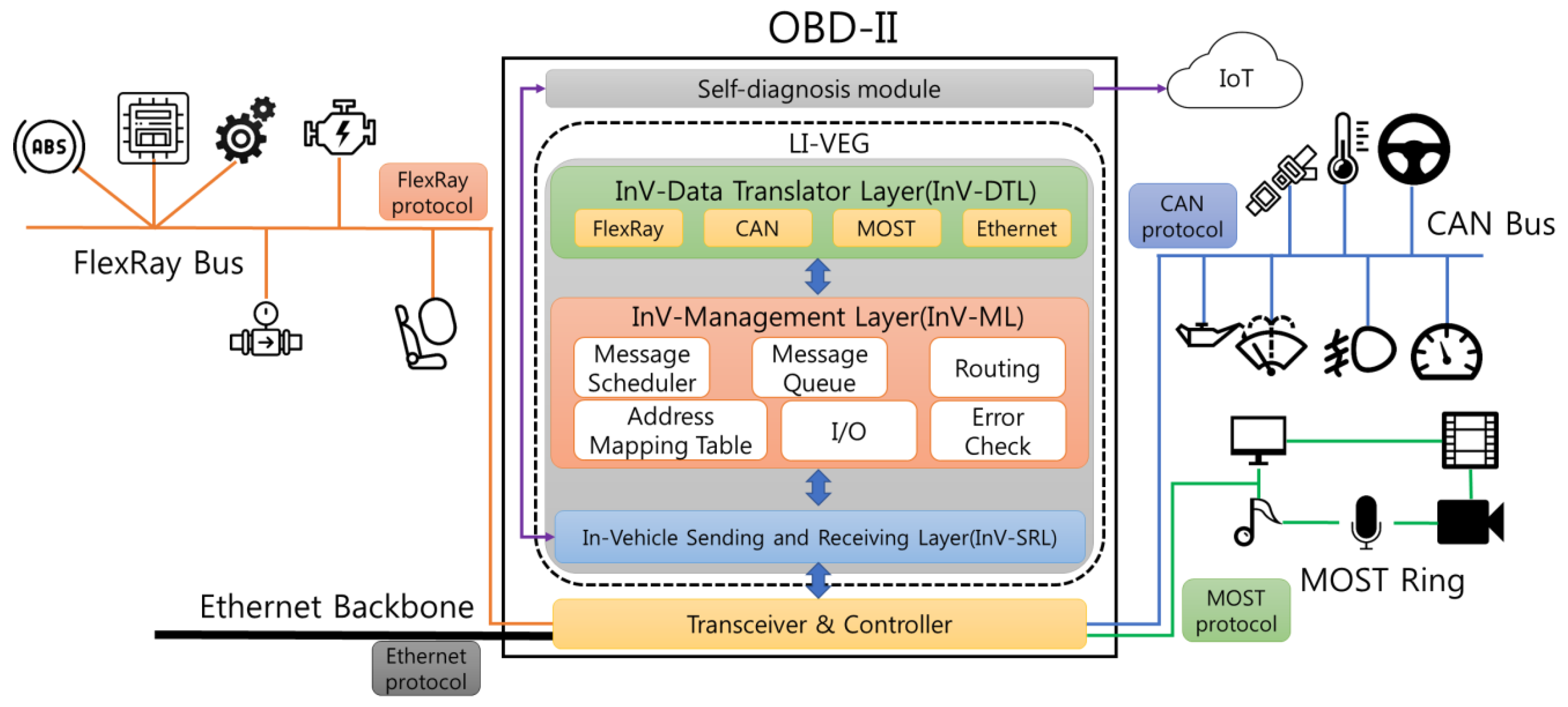
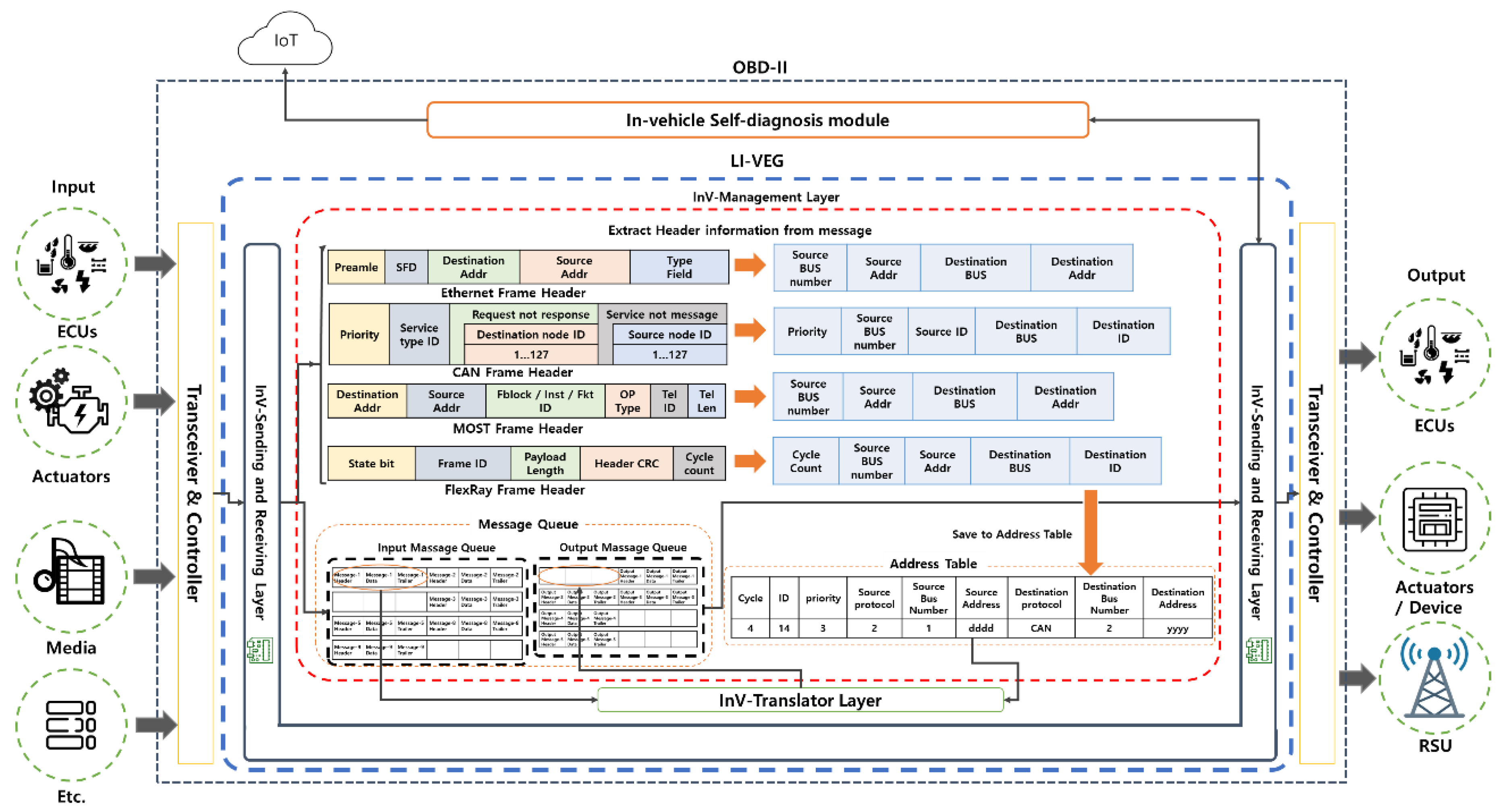
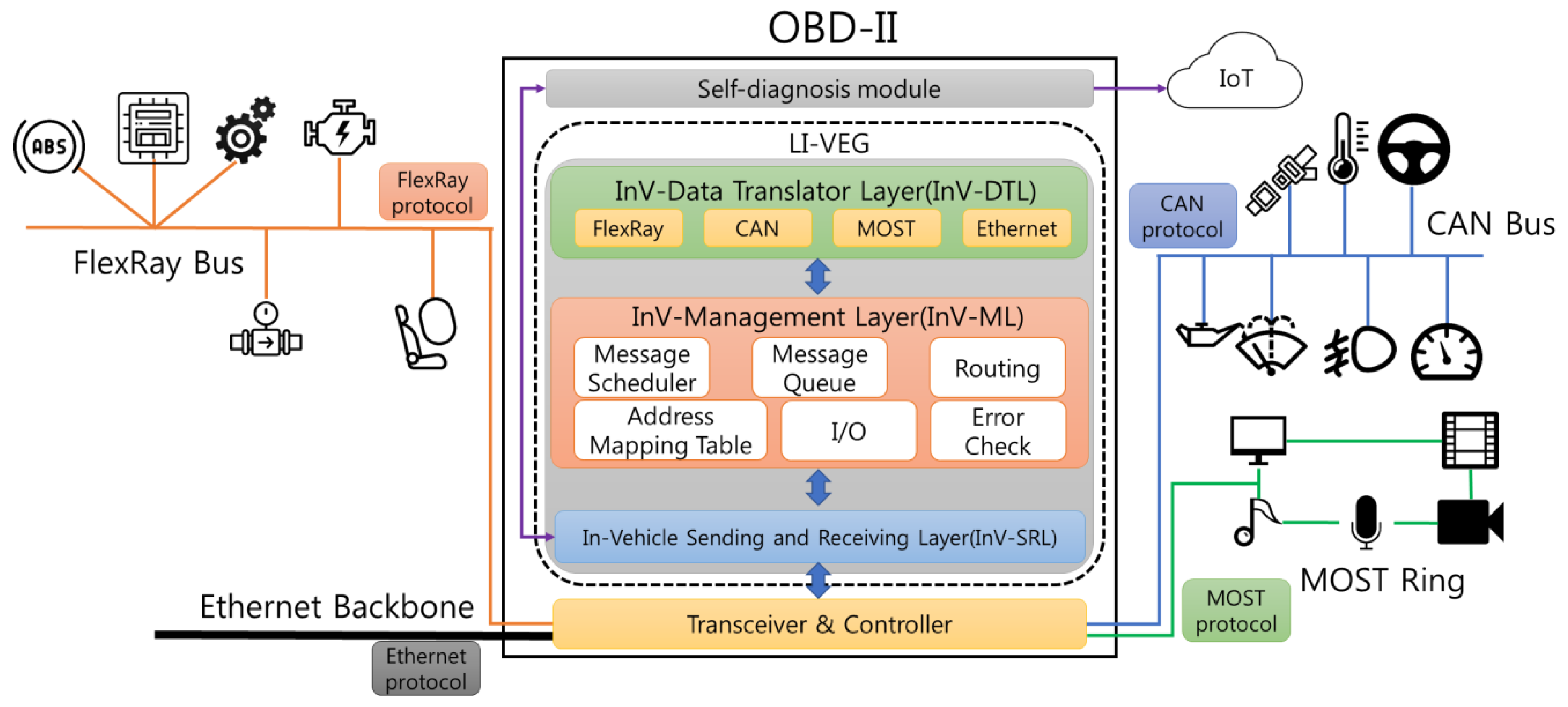
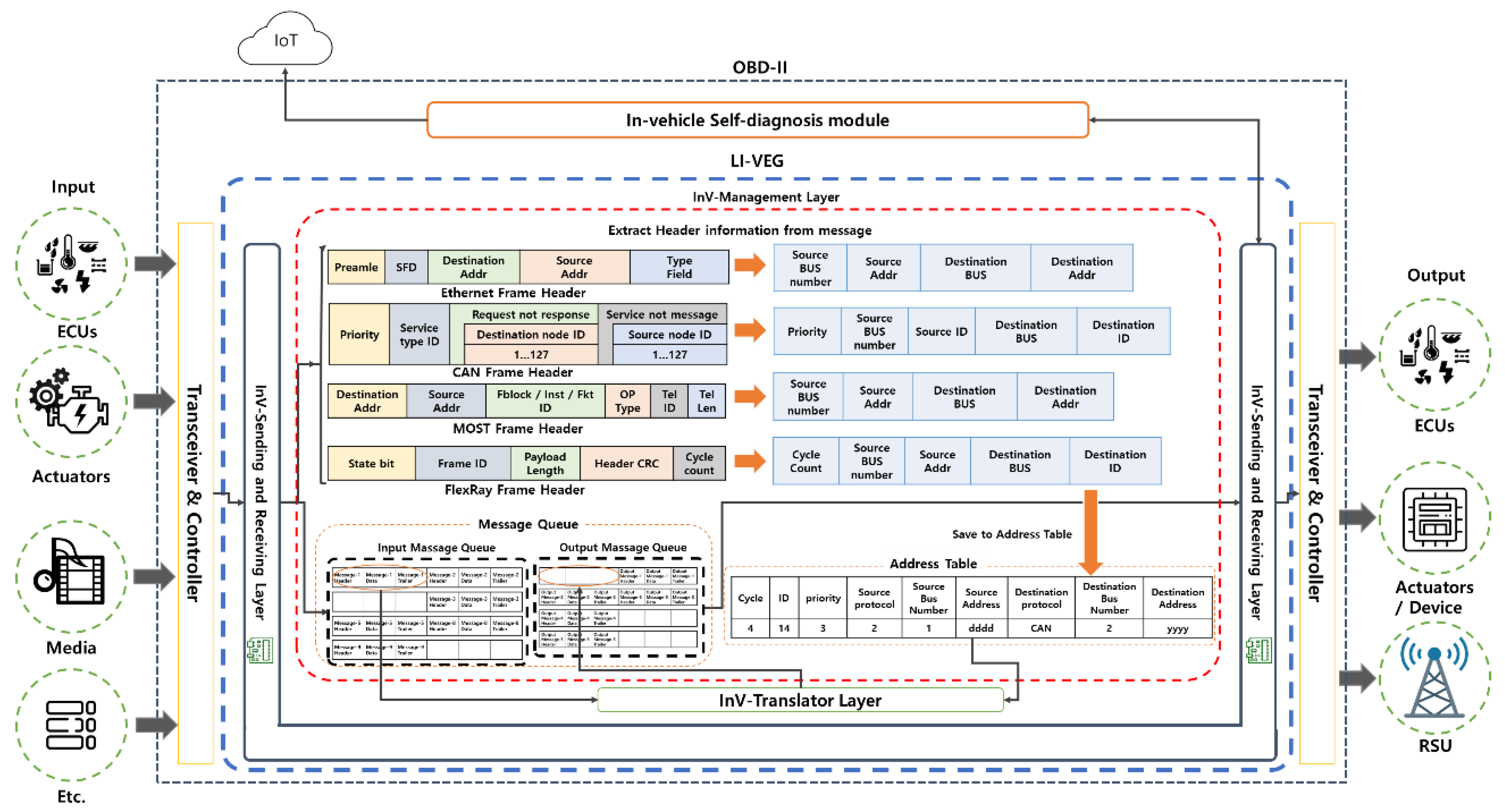
Figure 2 shows the structure of OBD-II including the LI-VEG which is a part for the self-diagnosis of an autonomous vehicle.
The LI-VEG working in OBD consists of three layers: InV-SRL, InV-ML and InV-DTL. First, the InV-SRL receives the messages from FlexRay, CAN, MOST, and Ethernet and then transfers the received messages into the Gateway. Second, the InV-ML manages the message transmission and reception of FlexRay, CAN, MOST, and Ethernet and the Address Mapping Table. Third, the InV-DTL decomposes the messages of FlaxRay, CAN, MOST, and Ethernet and recomposes them to the frame suitable for a destination.
3.2. A Design of a Sending and Receiving Layer (InV-SRL)
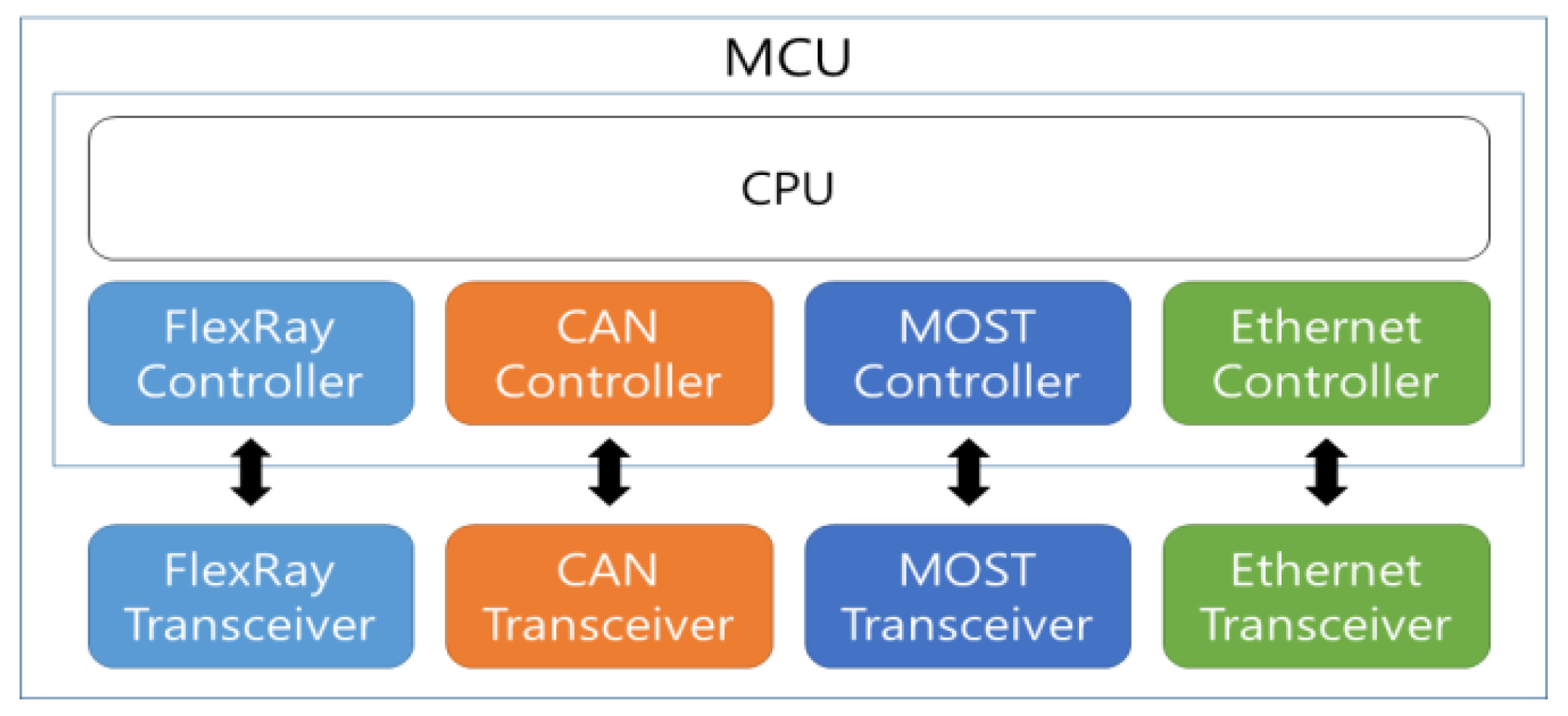
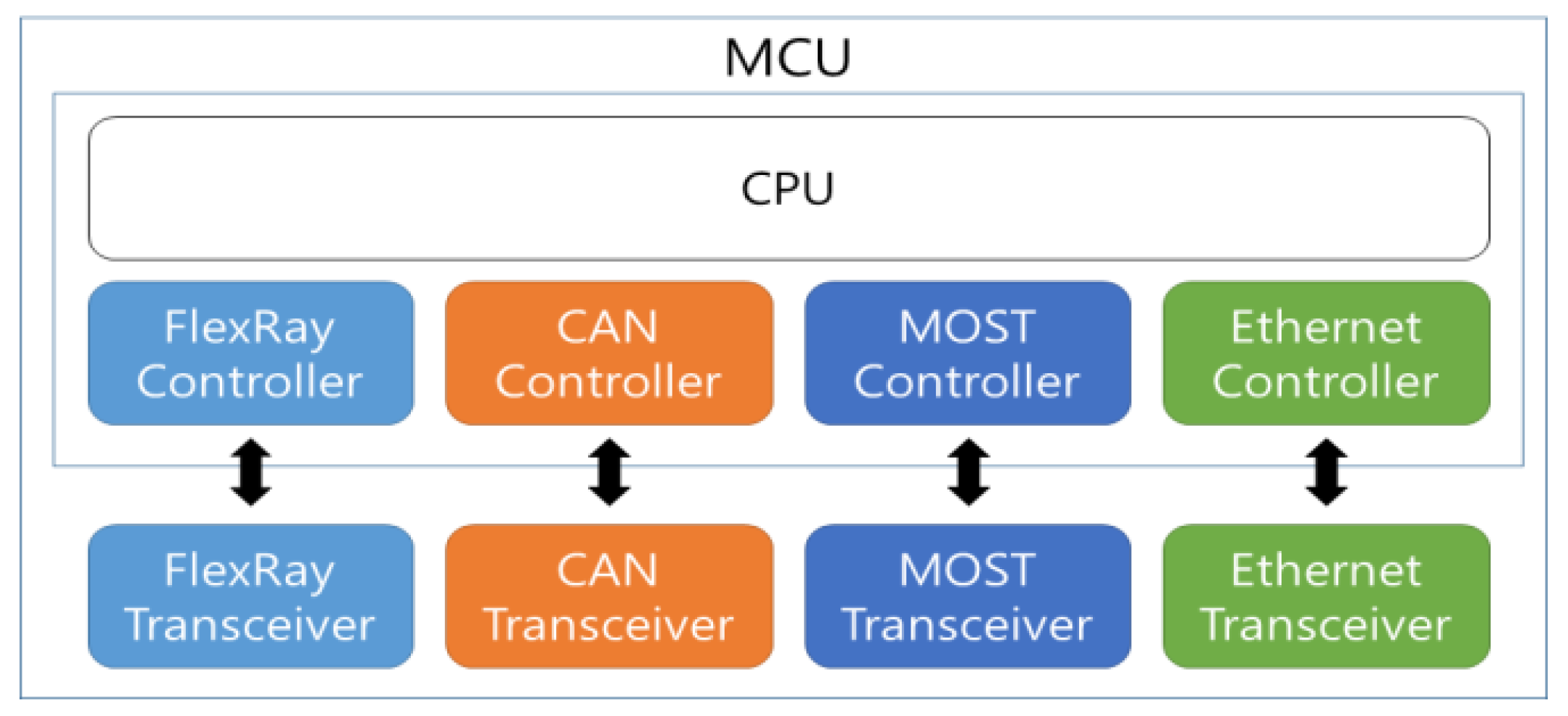
The InV-SRL acts as an interface to transmit and receive the messages between the InV-ML and hardware devices (transceiver and controller). A transceiver is a hardware device that transmits and receives the messages of each protocol. A controller used for message processing is embedded in the MCU. The controller stores the bus serial bits of messages in the MCU. Messages received through the transceiver and the controller are transmitted to the InV-ML via the InV-SRL.
If the InV-SRL receives a message, the received message is transferred to the InV-ML. The transferred message is stored in an Input Message Queue. If the InV-SRL needs to transmit the message to hardware devices, it receives the message stored in an Output Message Queue of the InV-ML and transmits it to hardware devices.
Figure 3 shows the block diagram of the transceiver and the controller.
3.3. A Design of an InV-Management Layer (InV-ML)
The InV-ML has two functions. First, the InV-ML receives messages from the InV-SRL and extracts only the necessary data, such as source, destination address, etc., from the received messages to makes the received messages lightweight. Only the extracted data are stored in an Address Mapping Table. It must rapidly be mapped to actual data in the Input Message Queue.
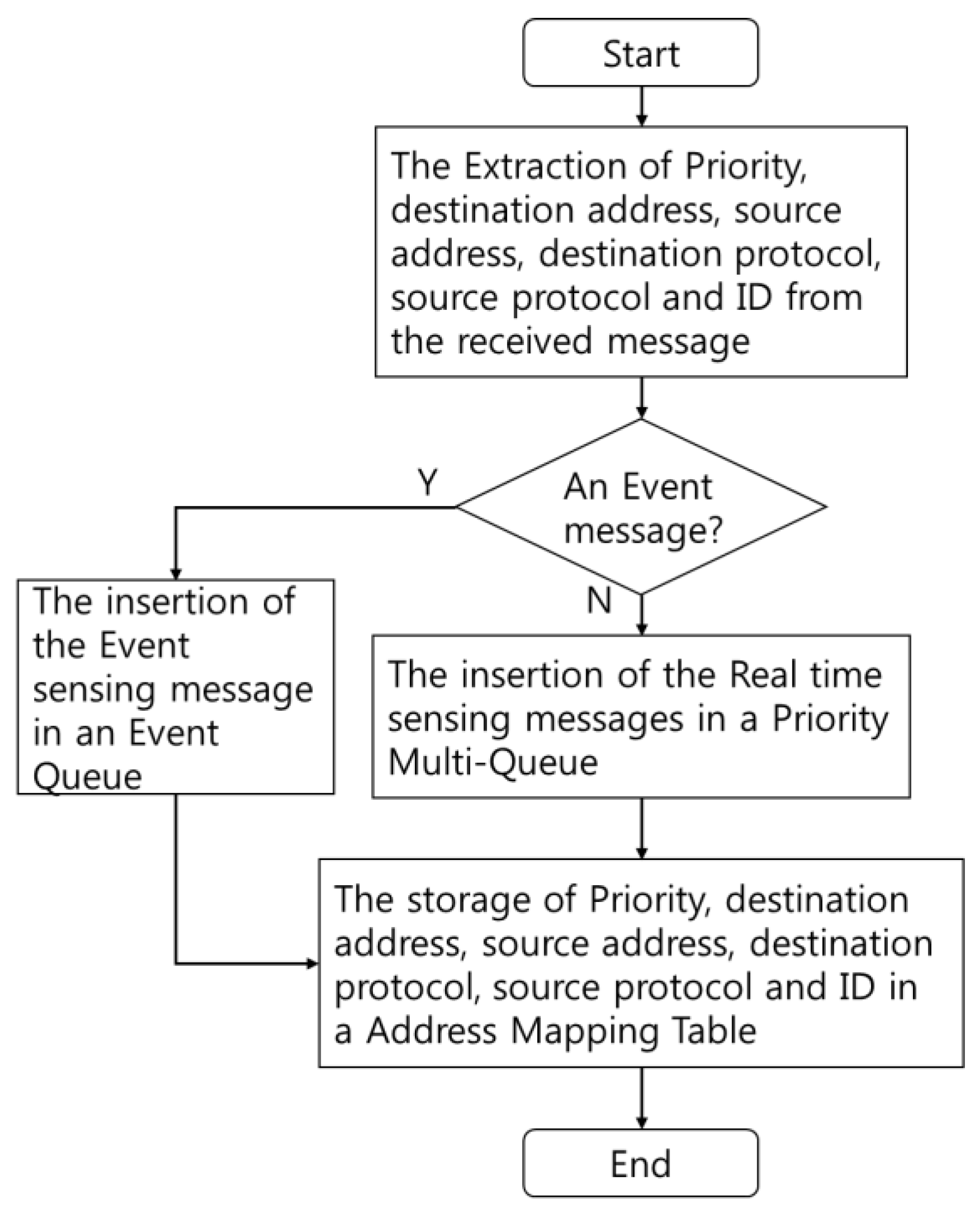
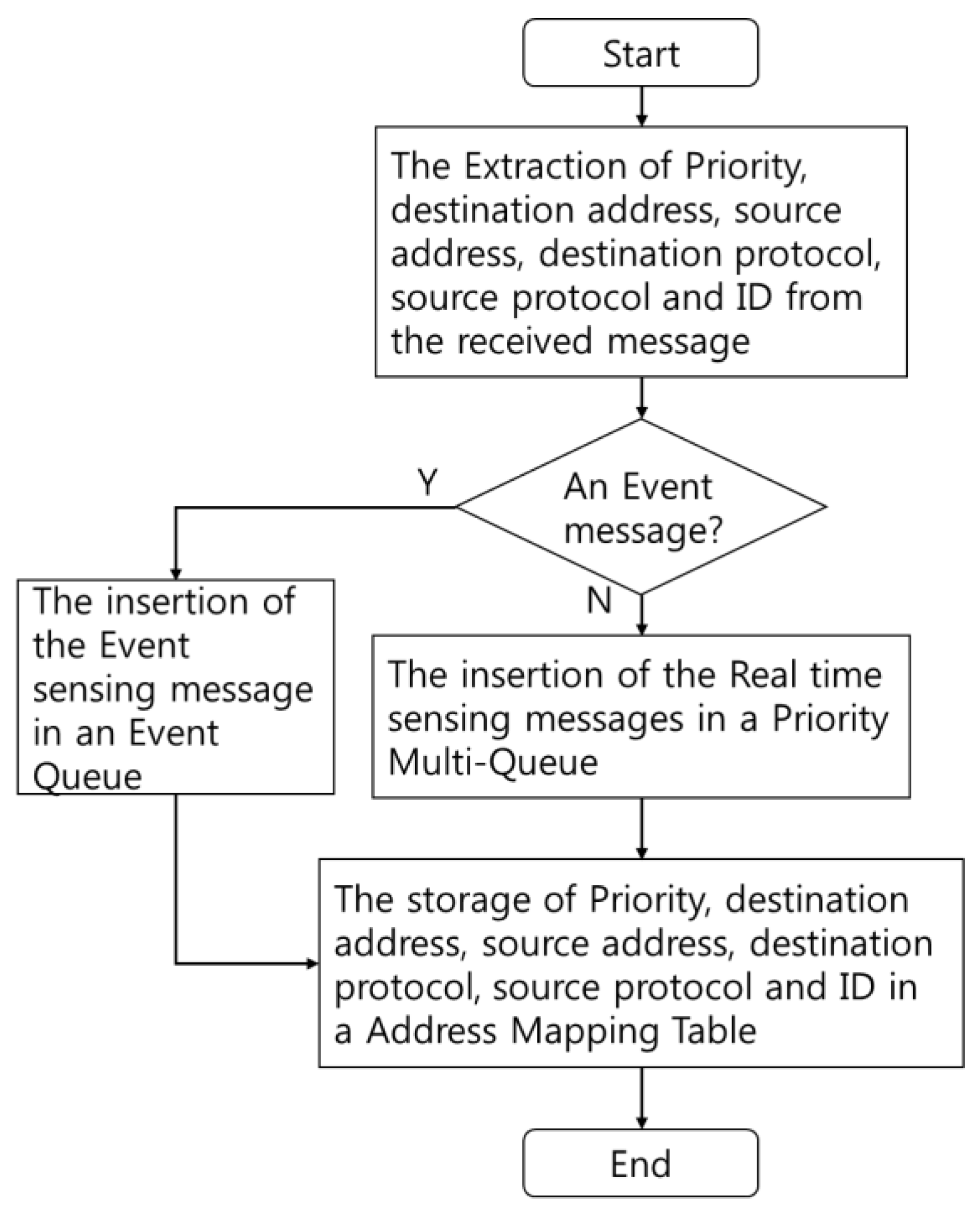
Second, if the extracted data are stored in the Address Mapping Table for mapping, the message is stored in the Input Message Queue according to the priority of a message. The Input Message Queue consists of a Priority Multi-Queue and an Event Queue. There are two types of data transferred from sensors: the real time sensing messages processed in the Priority Multi-Queue and the event sensing messages processed in the Event Queue. The event sensing messages is transmitted more rapidly than the real time sensing messages.
The Priority Multi-Queue is used to decide a priority between protocols and between inner messages of a protocol. The priority of protocol prevents the collision between protocols. The priority of messages provides emergent messages with higher priority and general messages with higher priority in proportion to the time when a message stays in the Input Message Queue.
The Event Queue is used to process Event sensing messages and the messages of the Event Queue have higher priority than those of the Protocol Priority Multi-Queue. The Output messages of InV-ML are processed in the Output Message Queue. The Output Message Queue is similar to an Input Message Queue in terms of function.
Figure 4 shows that the LI-VEG stores the received messages in an Input Massage Queue and only the necessary data from the message in an Address Mapping Table.
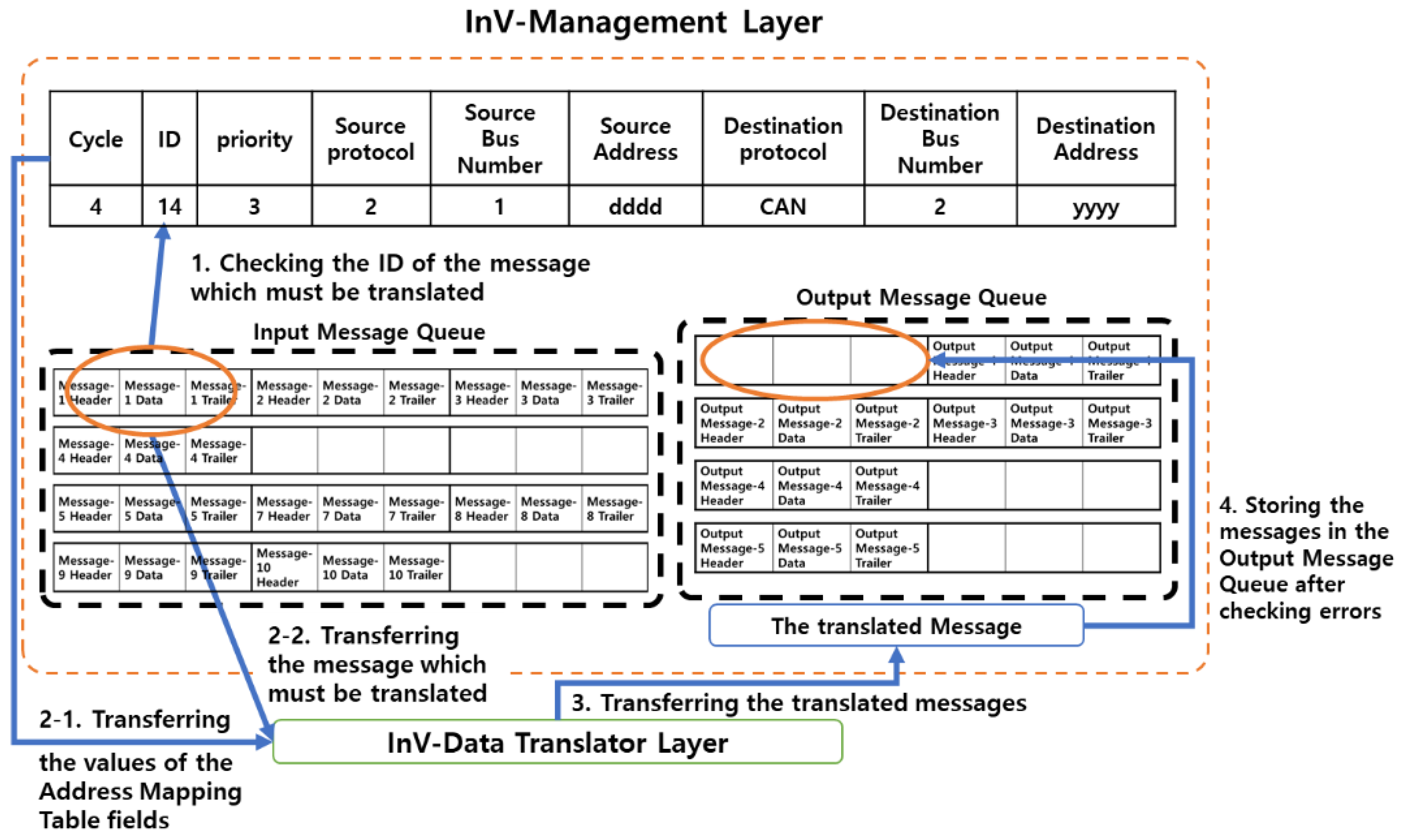
Figure 5 shows the process that a message which must be translated in the LI-VEG is made lightweight and is stored in the Input Message Queue. The operational process is as follows.
The LI-VEG receives the messages from the ECUs, Actuators, and media of a vehicle and stores them in the Input Message Queue.
The LI-VEG extracts only the data necessary for message translation such as source and destination address, and ID from a header for being lightweight. Because there is a cycle field describing a data transmission cycle in the case of FlexRay, the Cycle field must be extracted.
Lightweight data are stored in an Address Mapping Table for the rapid message translation.
The message in the Input Message Queue is translated in InV-TL and the extracted header information of the Address Mapping Table helps to translate it rapidly. The translated message is stored in the Output Message Queue.
The message in the Output Message Queue is transmitted to a destination protocol bus.
The Field Name of
Table 1 consists of Cycle, ID, Priority, Source Protocol, Source Bus Number, Source Address, Destination Protocol, Destination Bus Number, and Destination Address.
The header information of a FlexRay message is extracted and each value of the extracted header information is stored in the Ex1 column of
Table 1.
The Cycle field value in the header information of a FlexRay message is stored in the Cycle field in the EX1 of
Table 1 and the ID value in the header information of a FlexRay message is stored in the ID field in the EX1 of
Table 1. The ID field value in the header information of a CAN message is stored in the ID field in the EX2 of
Table 1. Because the header information of the CAN message has no a Cycle field, it remains blank.
Priority field value is stored in the Priority field in the EX1 of
Table 1. Because the FlexRay uses a timer, not priority, the priority field value is not needed. In the case InV-ML receives a FlexRay message, 0 value is stored in the Priority field. The Priority value of the CAN message frame is stored in the Priority field in the EX2 of
Table 1.
The Source Protocol field is 2 bits and has a source protocol number in it. If the Source Protocol field value is 00, it means a CAN protocol. If it is 01, it means a MOST protocol. If it is 10, it means a FlexRay protocol. If it is 11, it means an Ethernet protocol.
The source protocol bus number which sent a message is stored in the Source Bus Number field. Because the Source Protocol field value is 10 and Source Bus Number field value is 1 in the EX1 of
Table 1, it means that a message was received from the Bus 1 using a FlexRay protocol. Because the Source Protocol field value is 00 and the Source Bus Number field value is 2 in the EX2 of
Table 1, it means that a message was received from the Bus 2 using a CAN protocol.
The source address of the received message is stored in the Source Address field.
The Destination Protocol field is 2 bits large and has a destination protocol number in it. The destination protocol bus number is stored in the Destination Bus Number field.
The destination address of the received message is stored in a Destination Address field. If the header information is stored in the Address Mapping Table, the InV-ML transfers the stored header information and the original message of the Input Message Queue to the InV-DTL according to priority.
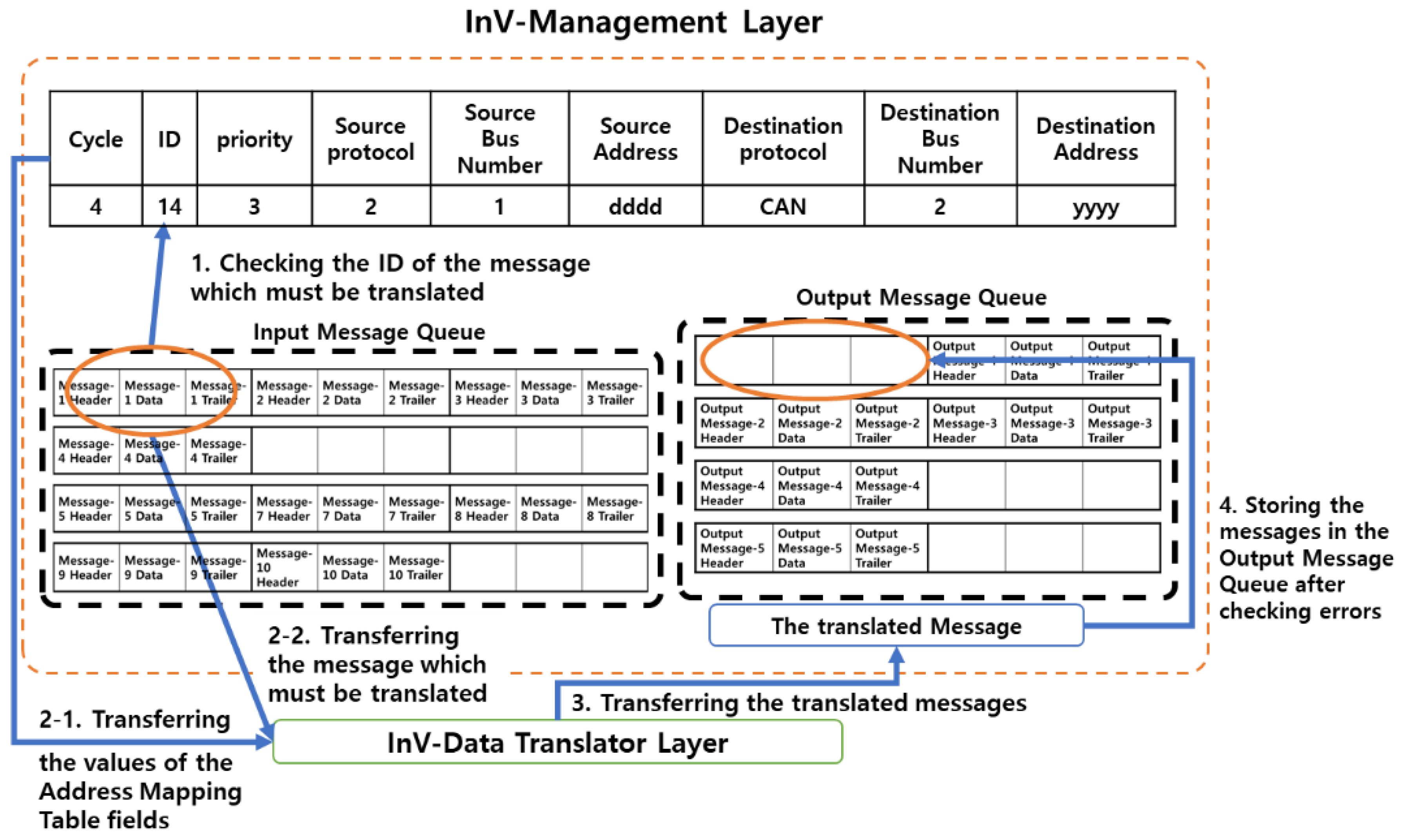
The stepwise process is shown in
Figure 6.
Before the Input Message Queue transfers messages to the InV-DTL, it searches for the tuple of the Address Mapping Table with the same the sending message ID as Address Mapping Table ID.
The message which must be translated and the tuple of the Address Mapping Table are transferred to the InV-DTL.
The InV-DTL translates messages, compares the destination and source address of the translated message to those of the Address Mapping Table. If they are all the same, the InV-DTL transfers the message to the InV-ML.
The InV-ML sets the paths of the translated messages, and delivers the messages to the Output Message Queue and transfers the message of the Output Message Queue to the SRL according the paths.
3.4. A Design of the InV-DTL
The InV-DTL translates the messages received from the Input Massage Queue by using the Translation Table and transfers the translated messages to the Output Massage Queue of the InV-ML.
The InV-DTL works as follows.
The InV-DTL receives the original message of the Input Massage Queue and the header information of the Address Mapping Table and generates the values of the Translation Table field by using the header information.
The InV-DTL decomposes the header and trailer from the message.
The InV-DTL translates the decomposed messages based on the Translation Table.
The InV-DTL gives them sequential numbers from the Translation Table if the translated messages are divided.
The translated messages are transferred to the Output Massage Queue of InV-ML.
Every protocol is different in the attributes of the Translation Table fields. The Translation Tables such as “FlexRay to CAN” Table, “CAN to FlexRay” Table, “MOST to CAN” Table, and “Ethernet to MOST” Table are generated and the Translation Table field values are generated again whenever messages are translated.
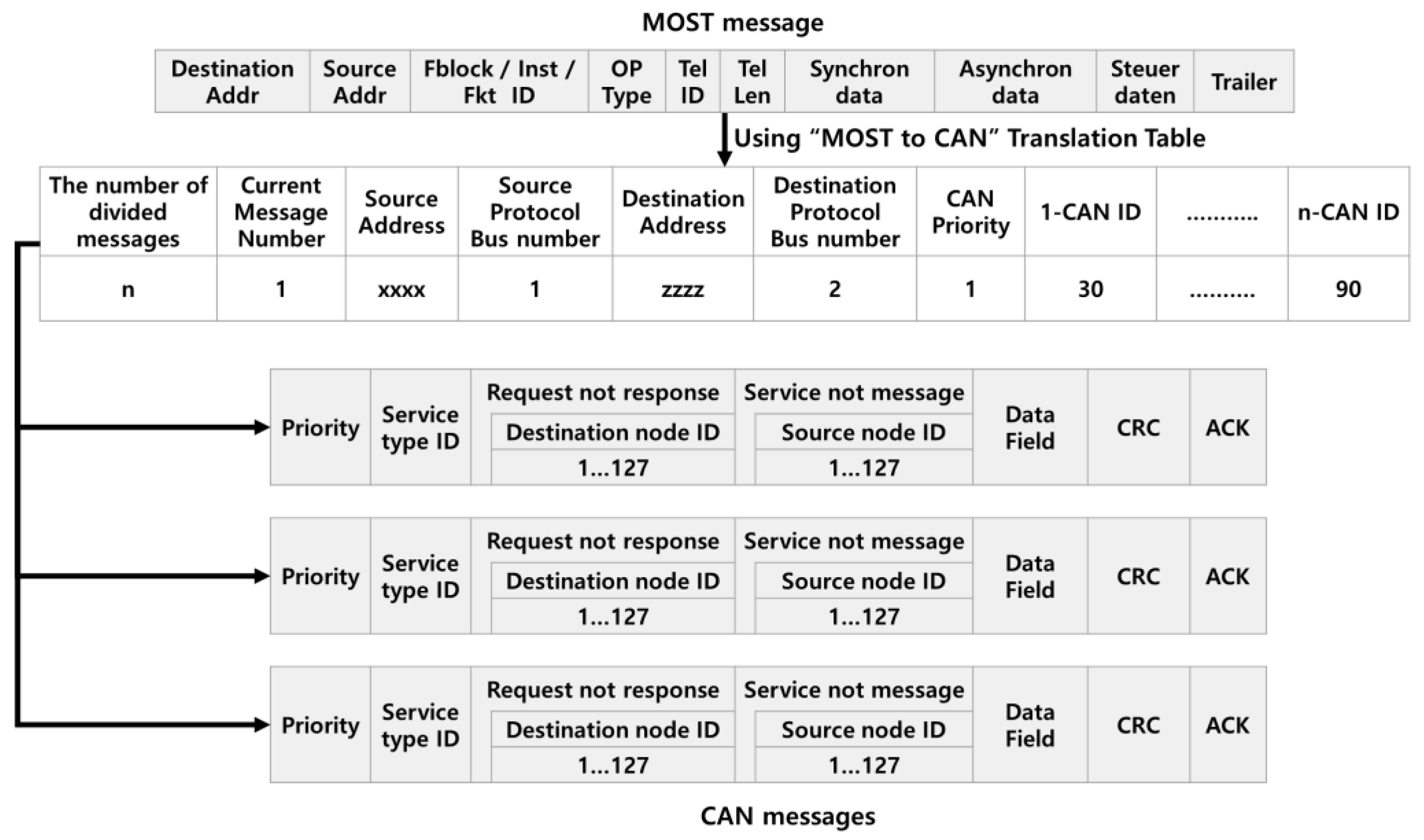
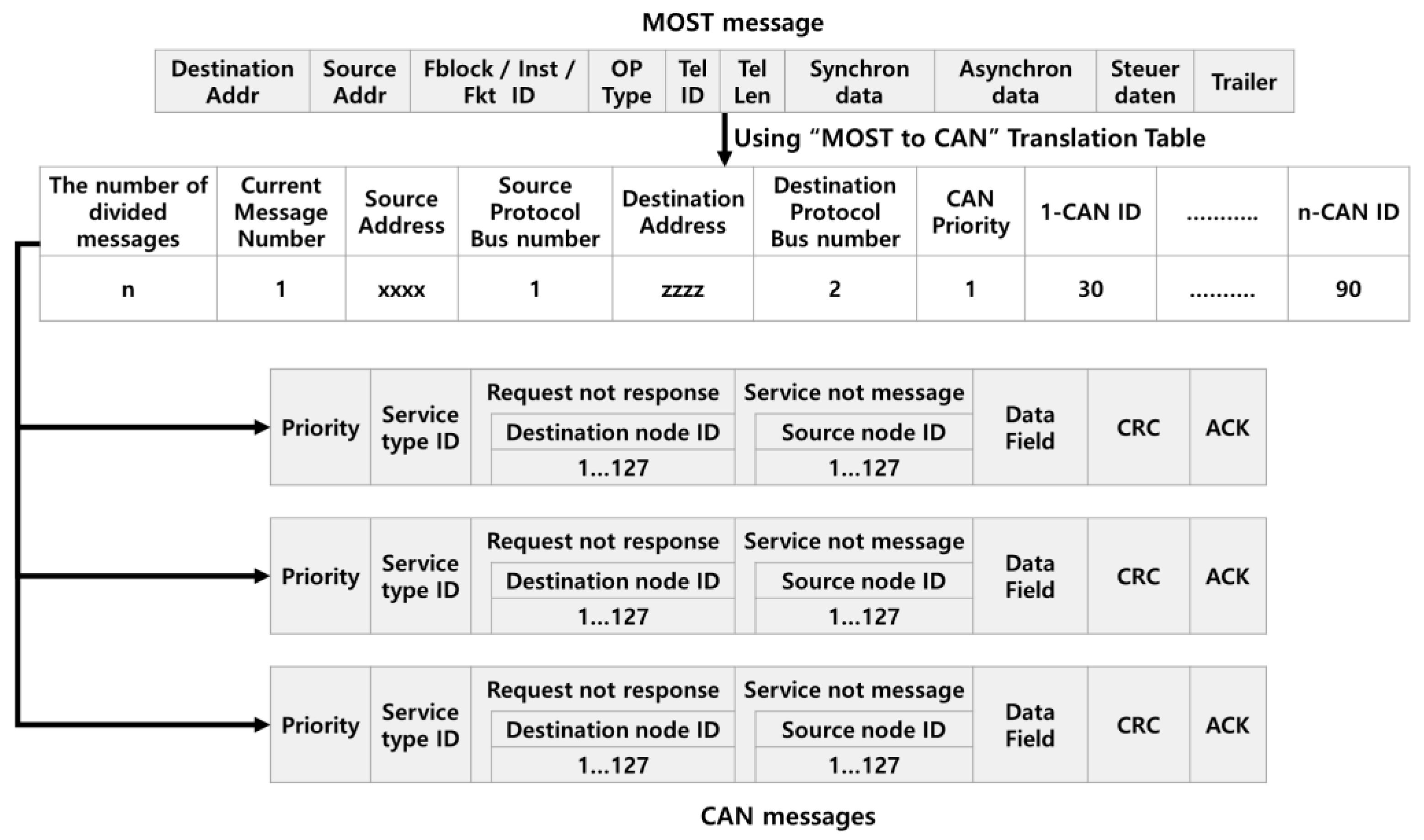
Figure 7 shows the “MOST to CAN” Translation Table translating MOST messages into CAN messages. The “MOST to CAN” Translation Table consists of the number of divided messages, Current Message Number, Source Address, Source Protocol Bus Number, Destination Address, Destination Protocol Bus Number, the CAN priority, and the CAN IDs. The CAN ID is used to enter the CAN Bus by Event. Tel ID and Tel Len field are translated into Service type ID of the CAN message by the CAN ID value of the Translation Table. The message numbers are given to every divided message sequentially. Destination Address of the MOST message is translated the Destination node ID of the CAN message by Destination Address and Destination Protocol Bus Number in the Translation Table. The Source Address of the MOST is translated to the Source node ID of the CAN message by Source Address and Source Protocol Bus Number in the Translation Table. The Request not response field value of the CAN message is always fixed as 1, and the Service not message field of the CAN message is always fixed as 0. The CAN Priority field value of the Translation Table is generated by using the Address Mapping Table. It is used to map the Priority field value of CAN message. The fields such as Fblock, Inst, Fkt ID and OP Type are functional blocks of the MOST message. They are not used in the CAN. The Synchronous data and the Asynchronous data are translated to the Data field value of the CAN message.
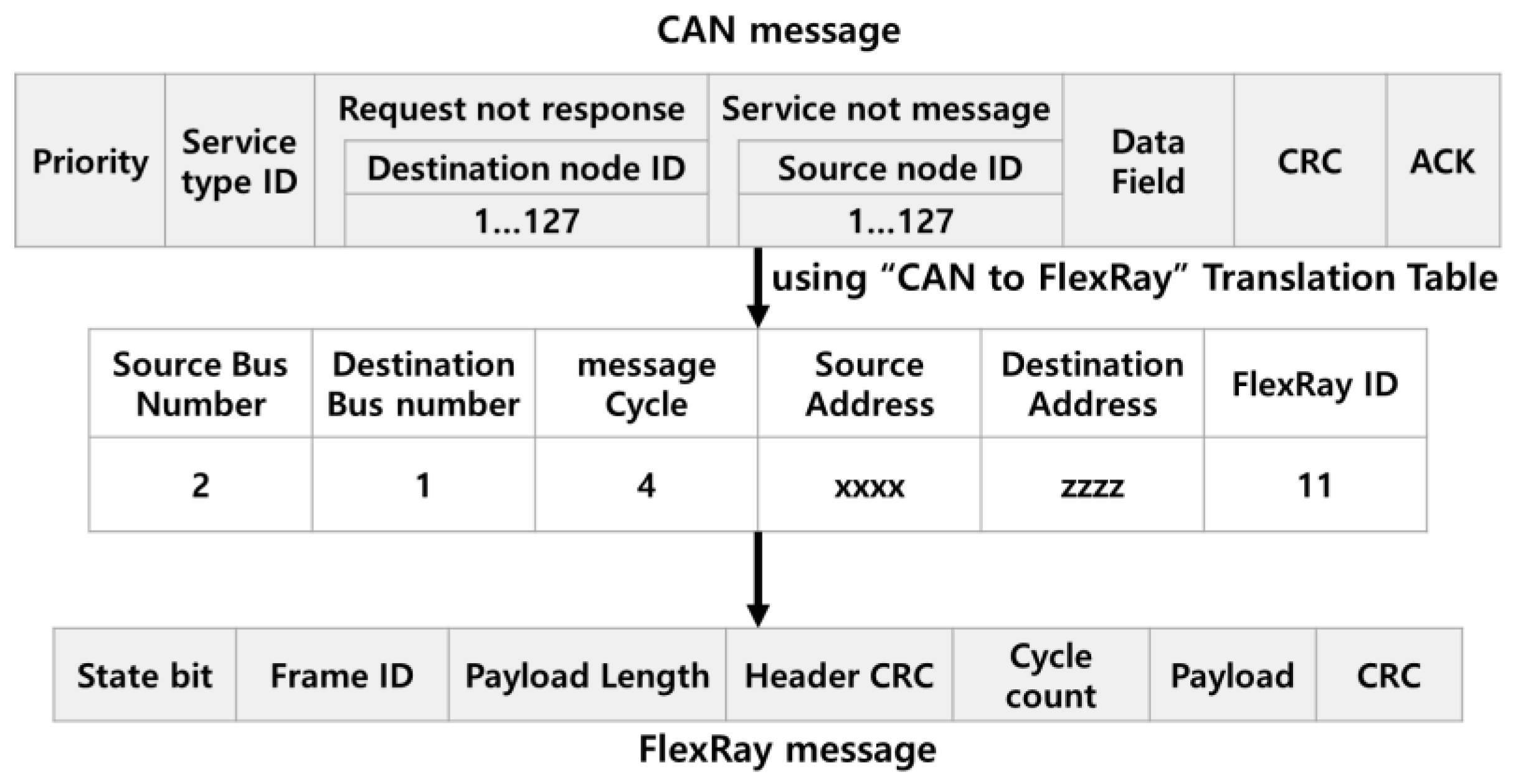
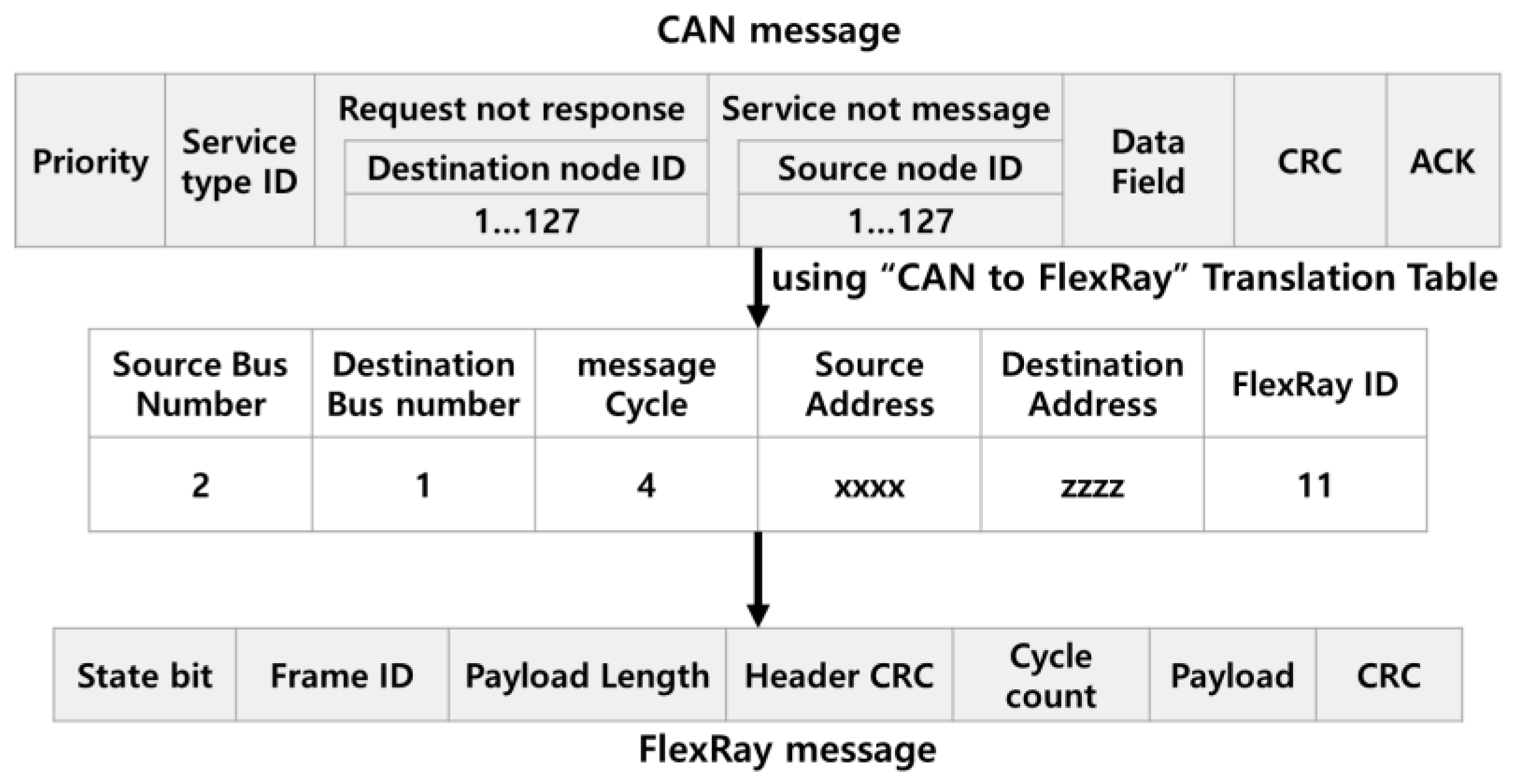
Figure 8 shows the “CAN to FlexRay” Translation Table translating CAN messages into FlexRay messages. Because the FlexRay is a protocol based on Timing, a Cycle field is used and a Priority and an ID field are not used when messages are translated. The translated messages enter a destination FlexRay Bus by using a Cycle value. Service type ID of the CAN message is translated into Frame ID of FlexRay message by FlexRay ID of the Translation Table. Message Cycle of the Translation Table is generated based on the Address Mapping Table, and is used to decide Cycle count of FlexRay message. Because the State bit, the Payload Length, the Header CRC and the CRC are not included in the CAN message, they are generated by InV-DTL.
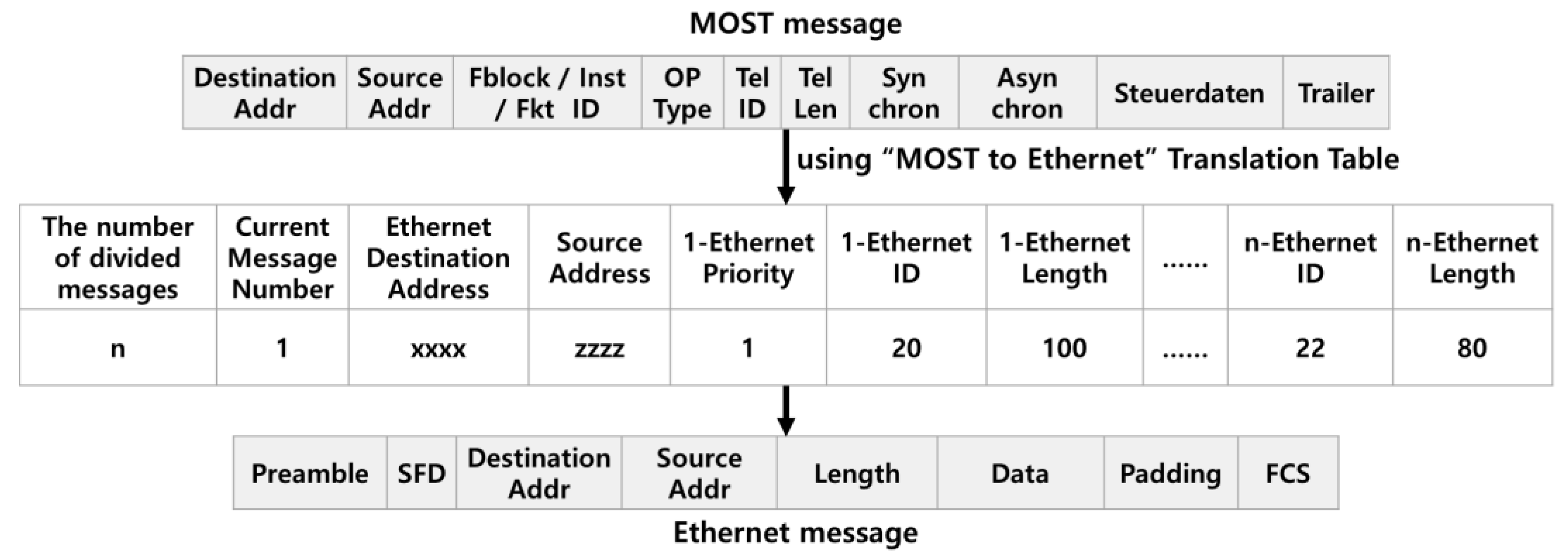
Figure 9 shows the “MOST to Ethernet” Translation Table translating the MOST messages into the Ethernet messages. Because the Ethernet is used as a Backbone with high capacity, an attribute on Bus number is not generated in the Translation Table. Therefore, the Translation speed is the highest when the MOST messages are translated into the Ethernet messages. Destination Address value of the MOST message is translated Destination Address value of the Ethernet message by the Translation Table. Source Address of the MOST message is translated Source Address of the Ethernet message by the Translation Table. The Tel Len value is translated to the Length value of the Ethernet message by the Translation Table. The Synchronous data and the Asynchronous data are translated to the Data field value of the Ethernet message. The Preamble, the SFD and the Padding field values are generated by InV-DTL and FCS field must be made by CRC method.
If the message translation is completed, the translated message is stored in the Output Message Queue of the InV-ML. If the message arrived at the Output Message Queue normally, it is transferred to the destination protocol bus to which the message belongs according to priority or cycle. Because the FlexRay protocol uses a Bus based on Timing, it transfers the translated messages to a destination protocol bus by using Cycle field of a header. The transmission of messages is done in the InV-SRL.
This method enables the smooth communication of MOST, FlexRay and CAN, and, if MOST, FlexRay and CAN messages are translated in Ethernet messages, the Ethernet messages are translated in WAVE signals to be able to communicate with RSU using an in-vehicle WAVE-to-Ethernet module.
4. The Performance Analysis
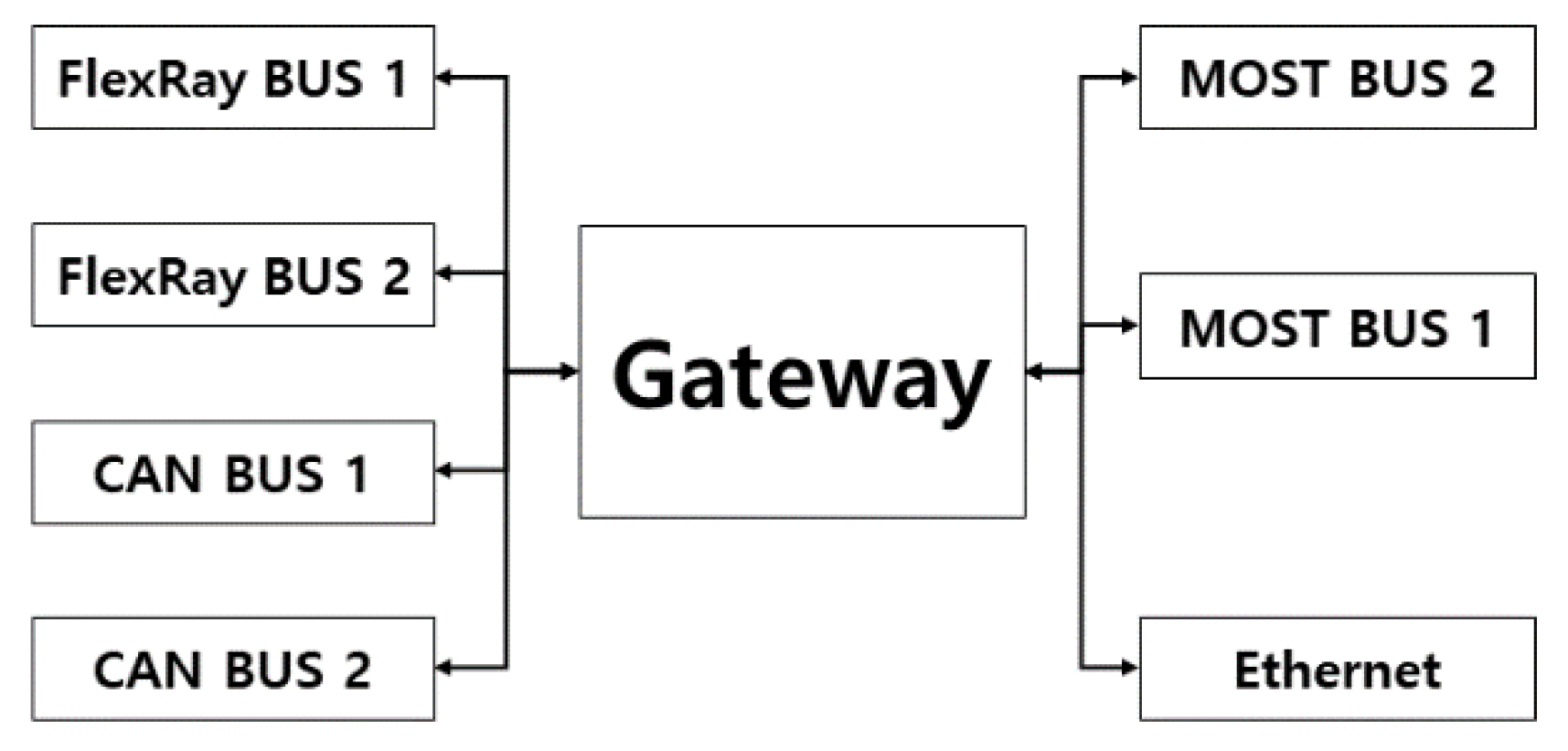
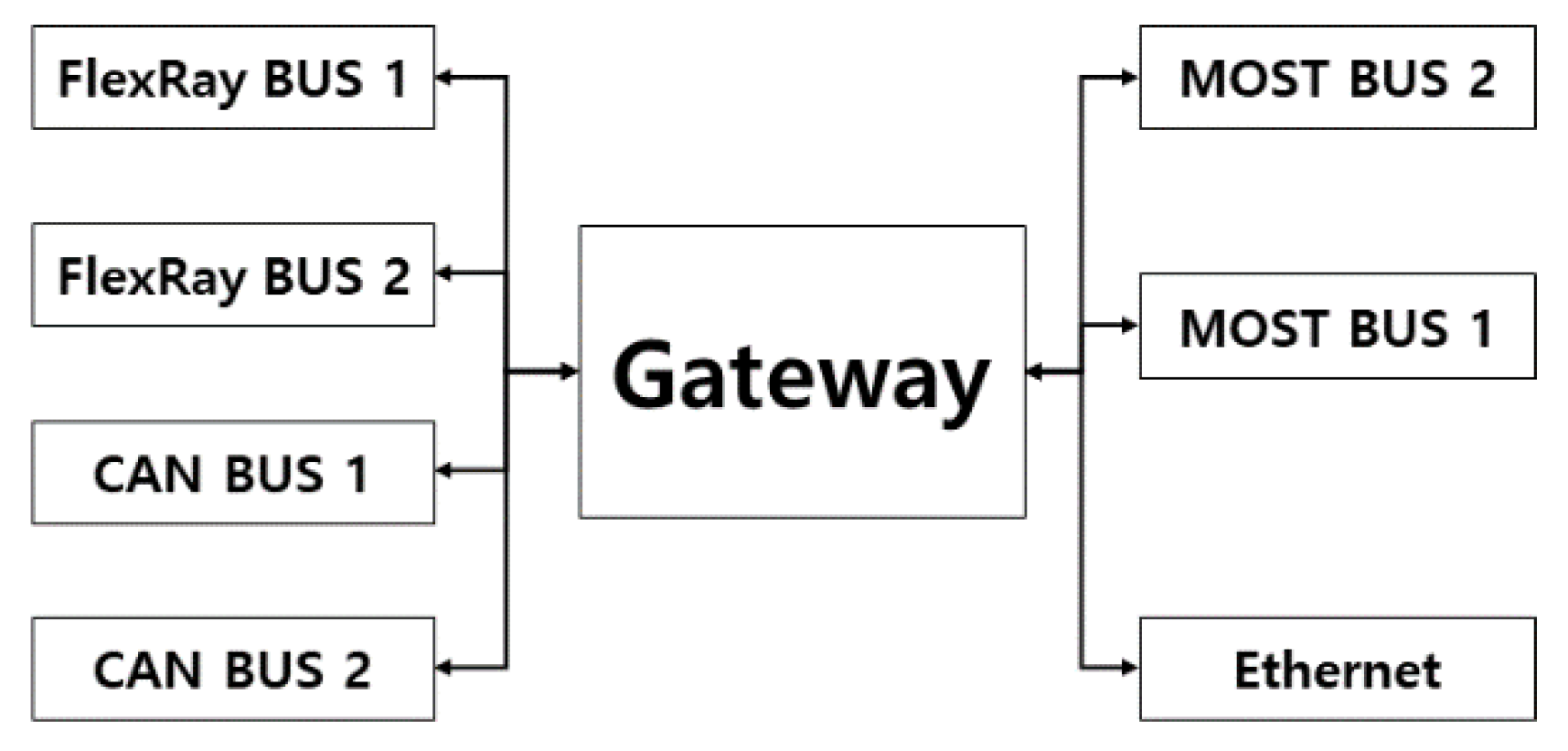
The model shown in
Figure 10 uses one gateway connected to two CAN buses, two FlexRay buses, two MOST buses and one Ethernet backbone to verify the LI-VEG performance proposed in this paper and each bus has four nodes.
The Main Processor of the LI-VEG uses ARM Cortex-A7 (900 Mhz) and is simulated in the RAM with these two experiments in PC.
In the first simulation environment, the transmission delay caused by message translation was measured while messages are transferred between four protocols (CAN, MOST, FlexRay and Ethernet). The transmission delay was measured based on the eight Message transmissions from CAN to FlexRay, the eight Message transmissions from CAN to Ethernet, and the eight Message transmissions from CAN to MOST. The transmission cycle of each message uses 14 ms. The transmission delay between the existing message mapping translation system not using a lightweight header and the message translation system using a lightweight header was compared.
Table 2 shows the simulation environment of the first simulation.
In the second simulation environment, the transmission delay caused by overhead was measured. The overhead happens in each protocol bus because of the continuous signal from the CAN. Transmission delay between the existing message translation system and the proposed message translation system was compared according as network traffic increases. In the same way as the first experiment, transmission delay was measured in the case the CAN messages are translated to the other three protocols.
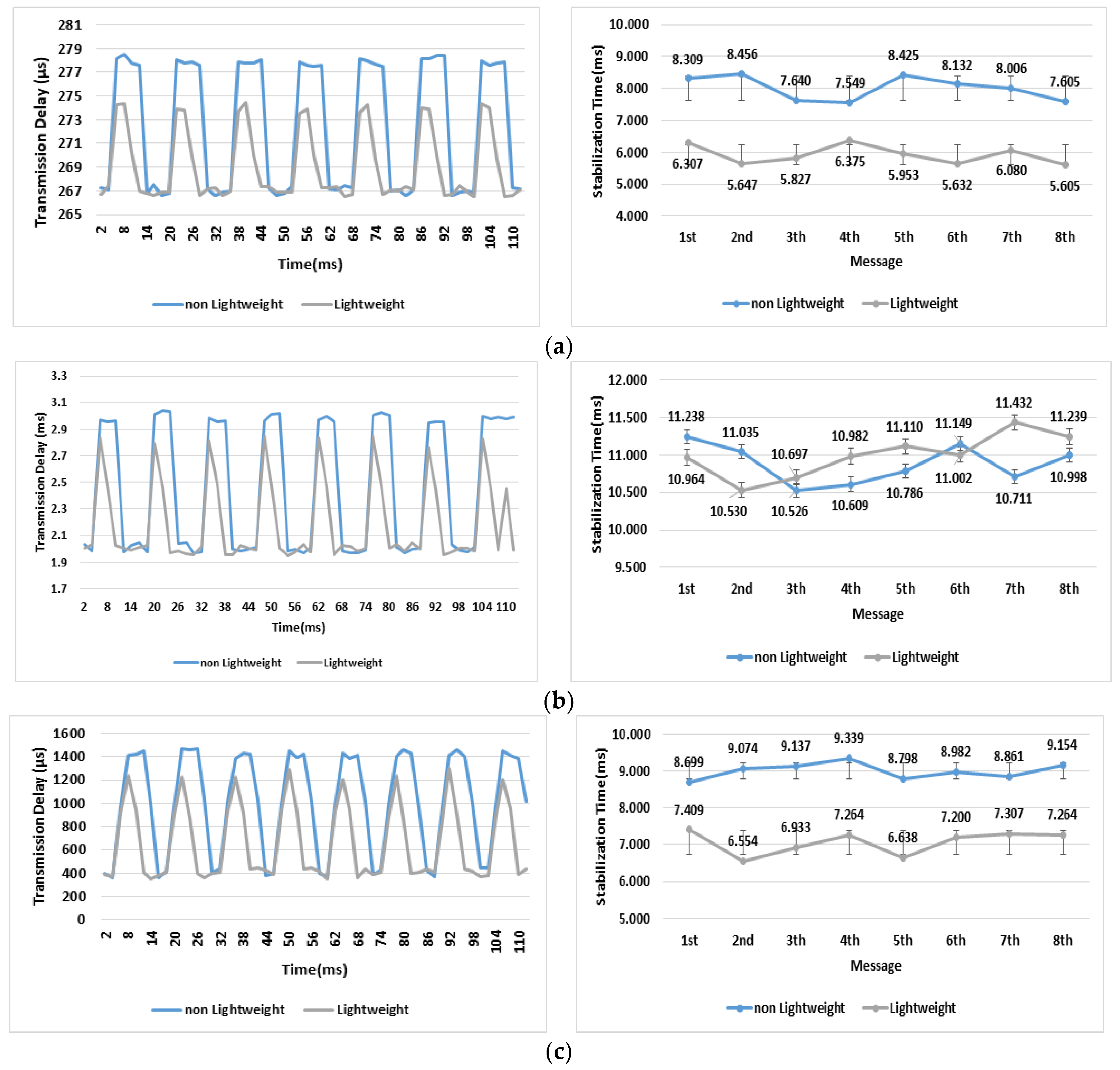
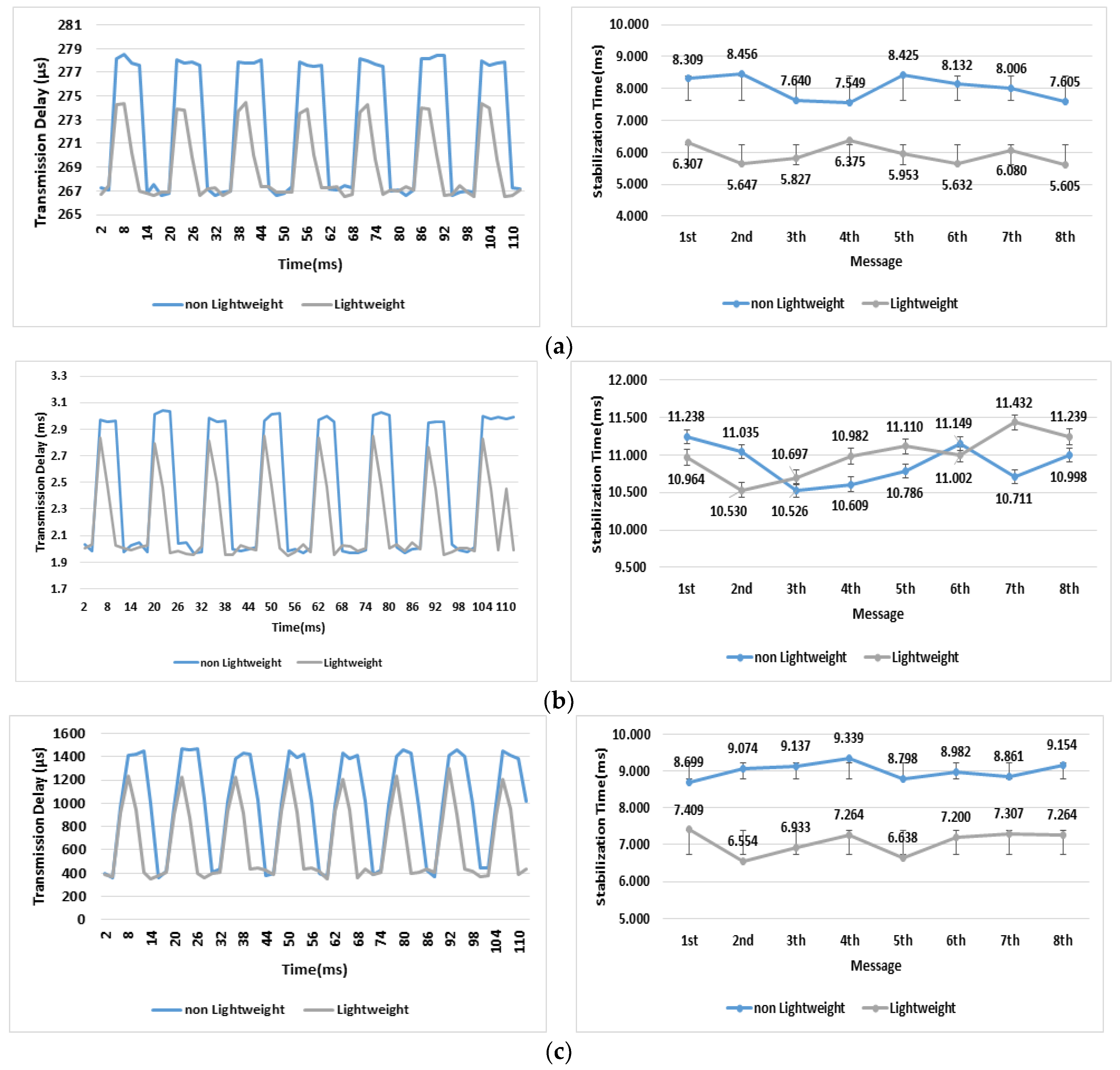
Figure 11a–c shows maximum transmission delay and its stabilization time when the CAN messages are transferred to the other protocols. The transmission delay means the time that it takes for a source message to be translated into a destination message in the LI-VEG. The stabilization time means the time between when translation overhead occurs and when its overhead disappears.
Figure 11a shows the transmission delay and stabilization time when messages are transferred from the CAN bus to the FlexRay bus. In the transmission, it takes maximum 278 μs transmission delay for the existing method to store and translate a message and about 8 ms to stabilize the transmission delay. It takes a maximum of 274 μs for the proposed method to store and transform a message and about 6 ms to stabilize the transmission delay. Therefore, the maximum transmission delay is improved by about 2% and its stabilization time about 25%.
Figure 11b shows the transmission delay and stabilization time when messages are transferred from CAN bus to MOST bus. In the transmission, it takes maximum 3.03 ms transmission delay for the existing method to store and transform a message and 11 ms to stabilize the transmission delay. It takes a maximum of 2.84 ms for the proposed method to store and transform a message and 11 ms to stabilize the transmission delay. Therefore, the maximum transmission delay is improved by about 7% and its stabilization time is the same.
Figure 11c shows the transmission delay and stabilization time when messages are transferred from CAN bus to Ethernet bus. In the transmission, it takes maximum 1.47 ms transmission delay for the existing method to store and translate a message and 9 ms to stabilize the transmission delay. It takes a maximum of 1.29 ms for the proposed method to store and transform a message and 7 ms to stabilize the transmission delay. Therefore, the maximum transmission delay is improved by about 11% and its stabilization time about 20%.
Table 3 shows how much the proposed method is improved in comparison to the existing method. Overall, the transmission delay time about message translation and transmission is reduced by an average of 10.83%. That is, if the lightweight method is used, transmission delay is reduced and data processing is improved.
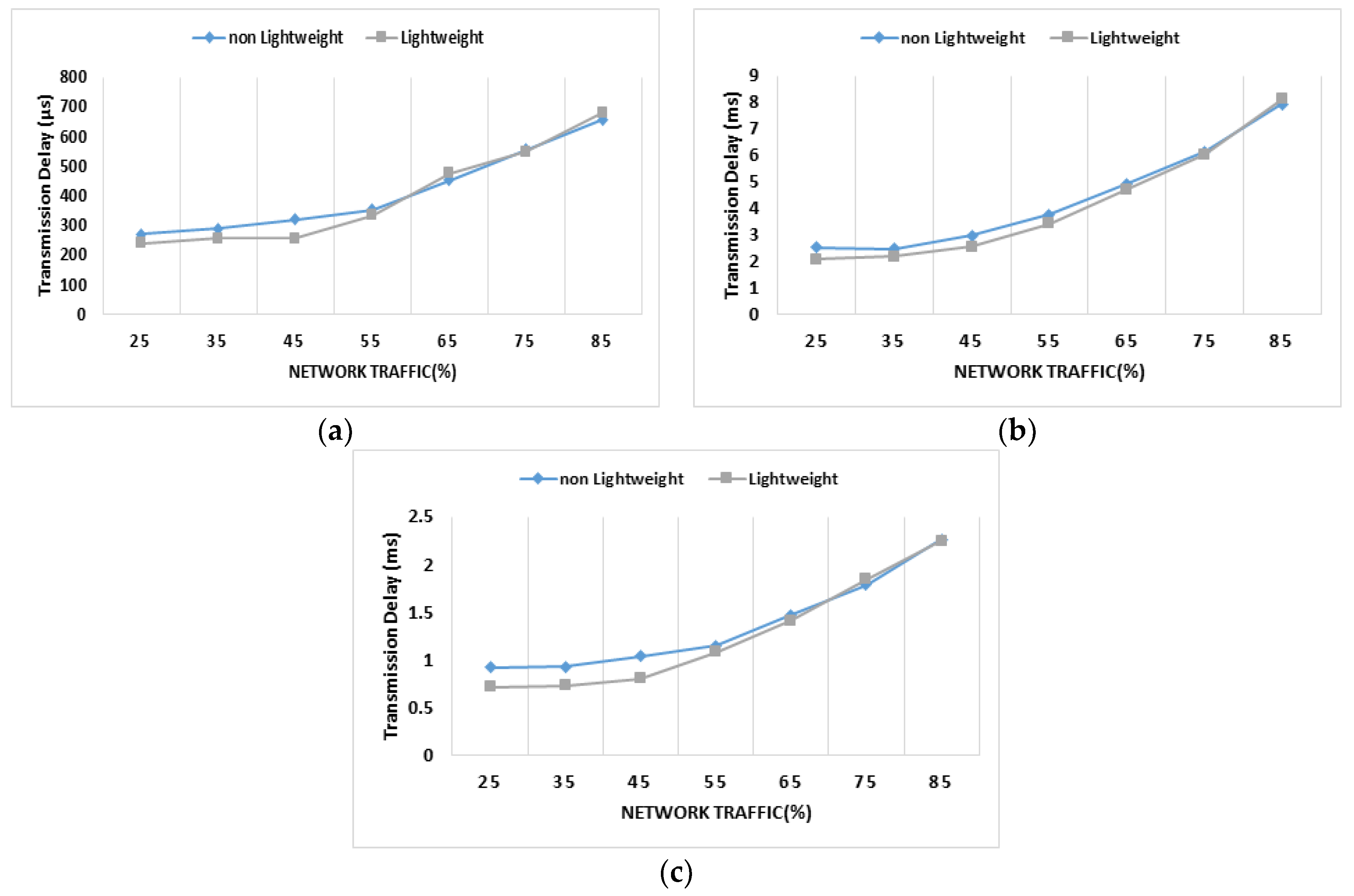
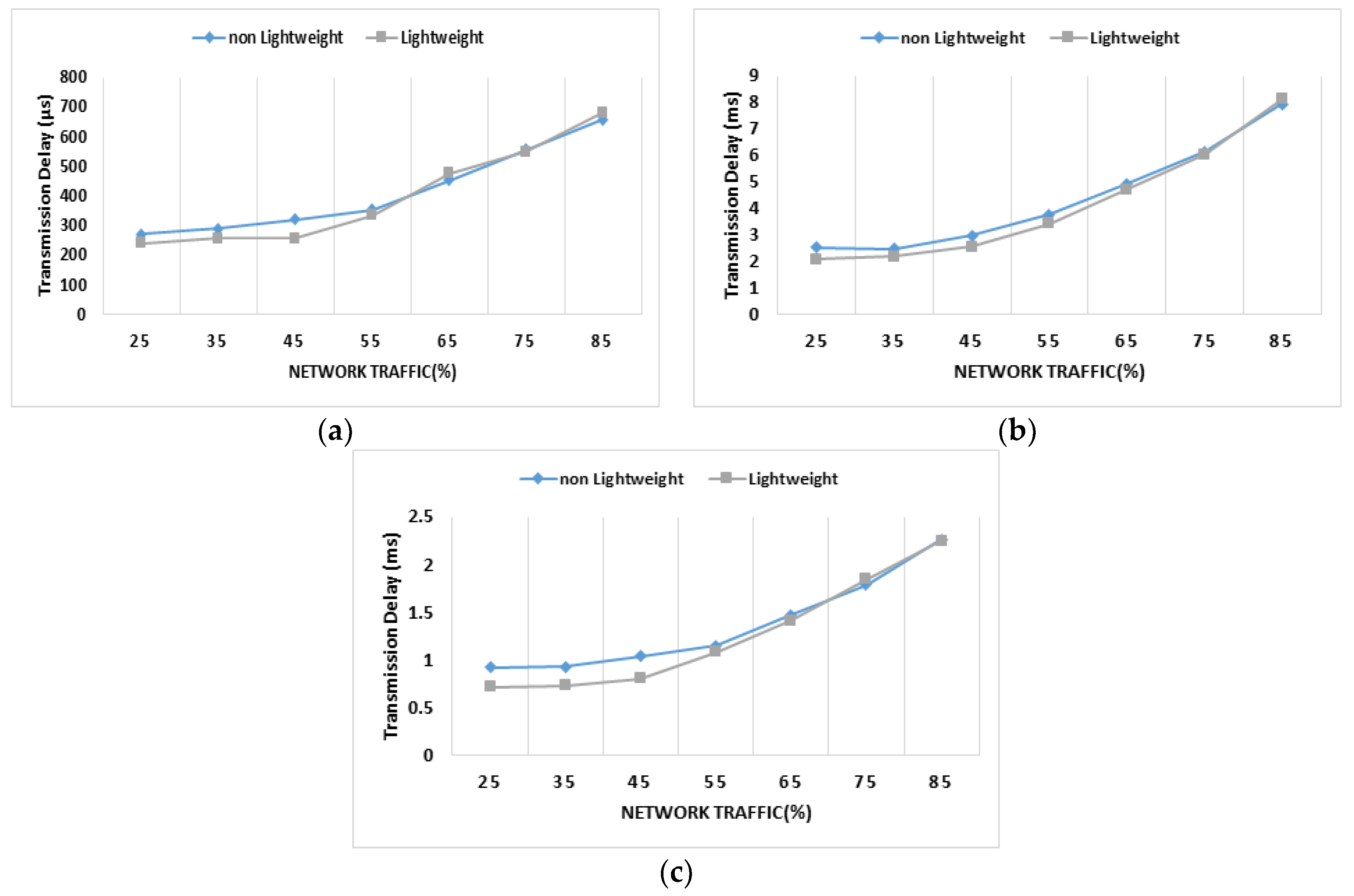
Figure 12 shows the average transmission delay by overhead happening when continuous messages are transferred from a CAN bus to a destination protocol.
When messages are transferred from the CAN to the FlexRay,
Figure 12a shows an average transmission delay according to network traffic increase. In the case the network traffic is 25%, the transmission delay of the existing method was measured as about 275 μs and that of the proposed method was measured as about 250 μs. In the case the network traffic is 85%, the transmission delay of the existing method was measured as about 656 μs and that of the proposed method was measured as about 670 μs. Therefore, when traffic increase is low, the proposed method is faster by about 9% than the existing method. However, when traffic increase is high, there is no difference between the methods.
When messages are transferred from the CAN to the MOST,
Figure 12b shows an average transmission delay according to network traffic increase. In thecase the network traffic is 25%, the transmission delay of the existing method was measured as about 2 ms and that of the proposed method was measured as about 2.5 ms. In the case the network traffic is 85%, the transmission delay of the existing method was measured as about 7.9 ms and that of the proposed method was measured as about 8.1 ms. Therefore, when traffic increase is low, the proposed method is faster by about 20% than the existing method. However, when traffic increase is high, there is no difference between the methods.
When messages are transferred from the CAN to the Ethernet,
Figure 12c shows an average transmission delay according to network traffic increase. In the case the network traffic is 25%, the transmission delay of the existing method was measured as about 0.9 ms and that of the proposed method was measured as about 0.7 ms. In the case the network traffic is 85%, the transmission delay of the existing method was measured as about 2.26 ms and that of the proposed method was measured as about 2.24 ms. Therefore, when traffic increase is low, the proposed method is faster by about 20% than the existing method. However, when traffic increase is high, there is almost no difference between the methods.
In brief, the transmission delay of the proposed method is lower as traffic value gets smaller. There is almost no difference between the two methods as traffic value gets larger, which it means that the two methods have the same transmission delay characteristic.
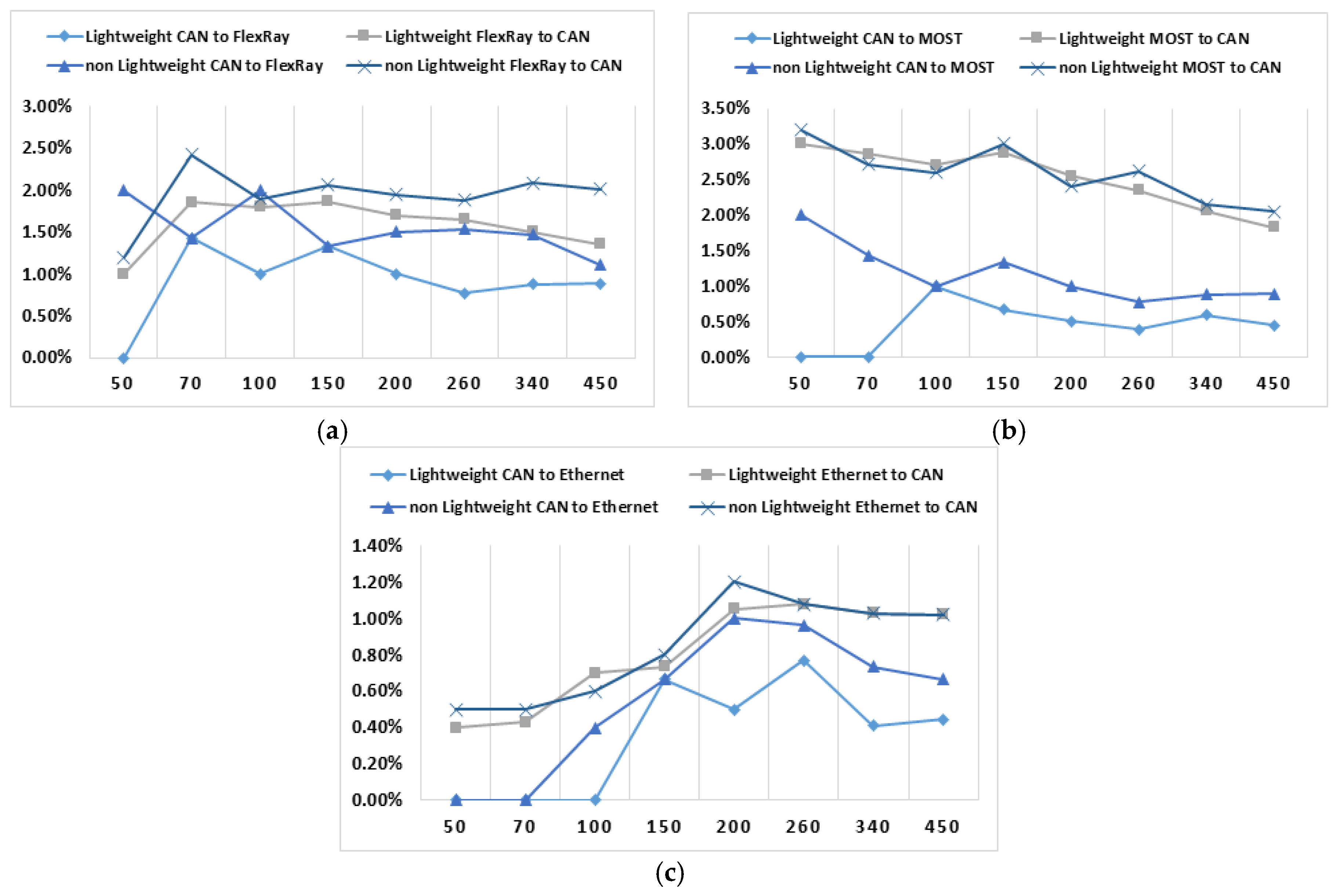
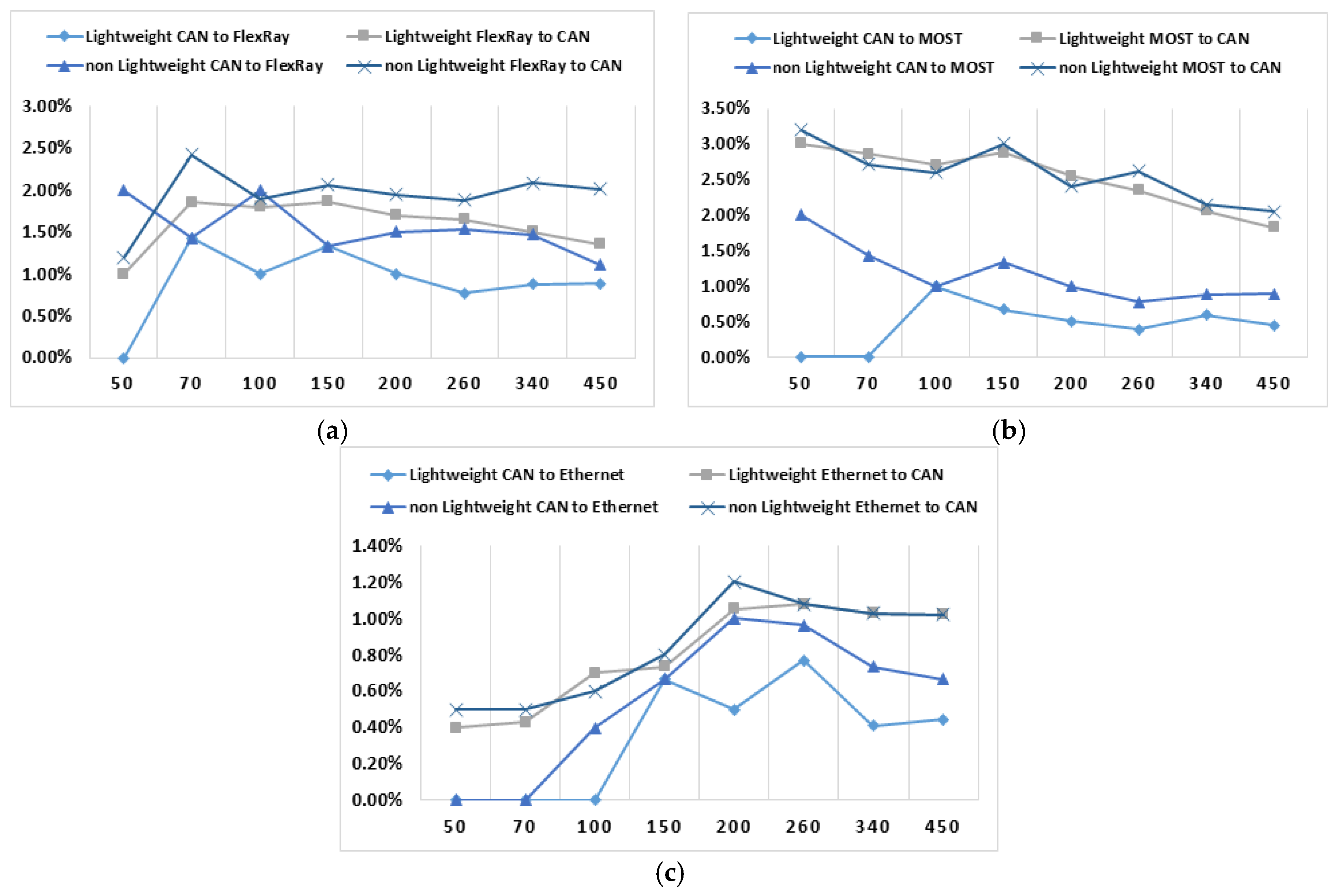
When messages are sent and received between a CAN bus and a FlexRay bus,
Figure 13a shows the error rate according to the number of messages. The error rate was measured as follows.
First, the error rate was measured when the CAN messages are transferred to a FlexRay bus. In the case 50 messages were transferred, the proposed method showed an error rate of 0% and the existing method of 2%. In the case 100 messages were transferred, the proposed method showed an error rate of 1% and the existing method of 2%. In the case 340 messages were transferred, the proposed method showed an error rate of 0.88% and the existing method of 1.47%. Therefore, the error rate of the proposed method is lower by about 1.3% compared to that of the existing method as the number of messages gets larger. The average error rate of the proposed method is 0.91% and that of the existing method is 1.55%.
Second, the error rate was measured when the FlexRay messages are translated into a CAN bus. In the case 50 messages were transferred, the proposed method showed an error rate of 1% and the existing method of 1.2%. In the case 100 messages were transferred, the proposed method showed an error rate of 1.8% and the existing method of 1.9%. In the case 340 messages were transferred, the proposed method showed an error rate of 1.5% and the existing method of 2.09%. Therefore, the error rate of the proposed method is lower by about 0.5% compared to that of the existing method as the number of messages gets larger. The average error rate of the proposed method is 1.59% and that of the existing method is 1.94%. Here, because one FlexRay message was divided into several CAN messages, the average error rate of the second gets higher by about 0.5% compared to that of the first.
When messages are sent and received between a CAN bus and a MOST bus,
Figure 13b shows the error rate according to the number of messages. The error rate was measured as follows.
First, the error rate was measured when the CAN messages are transferred to a MOST bus. In the case 50 messages were transferred, the proposed method showed an error rate of 0% and the existing method 2%. In the case 100 messages were transferred, the proposed method showed an error rate of 1% and the existing method of 1%. In the case 340 messages were transferred, the proposed method showed an error rate of 0.59% and the existing method of 0.88%. Therefore, the error rate of the proposed method is lower by about 0.3% compared to that of the existing method as the number of messages gets larger. The average error rate of the proposed method is 0.45% and that of the existing method is 1.16%.
Second, the error rate was measured when the MOST messages are transferred to a CAN bus. In the case 50 messages were transferred, the proposed method showed an error rate of 3% and the existing method of 3.2%. In the case 100 messages were transferred, the proposed method showed an error rate of 2.7% and the existing method of 2.6%. In the case 340 messages were transferred, the proposed method showed an error rate of 2.06% and the existing method of 2.15%. Therefore, the error rate of the proposed method is lower by about 0.1% compared to that of the existing method as the number of messages gets larger. The average error rate of the proposed method is 2.53% and that of the existing method is 2.59%. Here, because one MOST message is divided into several CAN messages, the average error rate of the second gets higher by about 2% compared to that of the first.
When messages are sent and received between a CAN bus and an Ethernet bus,
Figure 13c shows the error rate according to the number of messages. The error rate was measured as follows.
First, the error rate was measured when the CAN messages are transferred to an Ethernet backbone. In the case 50 messages were transferred, the proposed method showed an error rate of 0% and the existing method of 0%. In the case 100 messages were transferred, the proposed method showed an error rate of 0% and the existing method of 0.4%. In the case 340 messages were transferred, the proposed method showed an error rate of 0.41% and the existing method of 0.74%. Therefore, the error rate of the proposed method is lower by about 0.5% compared to that of the existing method as the number of messages gets larger. The average error rate of the proposed method is 0.35% and that of the existing method is 0.55%.
Second, the error rate is measured when the Ethernet messages are transferred to a CAN bus. In the case 50 messages were transferred, the proposed method showed an error rate of 0.4% and the existing method of 0.5%. In the case 100 messages were transferred, the proposed method showed an error rate of 0.7% and the existing method of 0.6%. In the case 340 messages were transferred, the proposed method showed an error rate of 1.03% and the existing method of 1.03%. Therefore, the average error rate of the proposed method is 0.81% and that of the existing method is 0.84%. The proposed method is lower than the existing method by about 0.03%. Here, the average error rate of the second gets higher by about 0.5% compared to that of the first. Overall, this experiment says that the error rate of the proposed method is lower compared to that of the existing method.
According to the three experiments above, the LI-VEG proposed in this paper has the following advantages:
When messages are transferred to the other protocol, the LI-VEG has lower transmission delay than the existing protocols.
When network traffic becomes lower, the LI-VEG has a lower transmission delay than the existing protocols. However, when network traffic becomes higher, the LI-VEG has almost the same transmission delay as the existing protocols.
When messages are transferred between protocols, the LI_VEG has a lower error rate than the existing protocols.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}