Comparative Study of Dynamic Stall under Pitch Oscillation and Oscillating Freestream on Wind Turbine Airfoil and Blade


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introductions
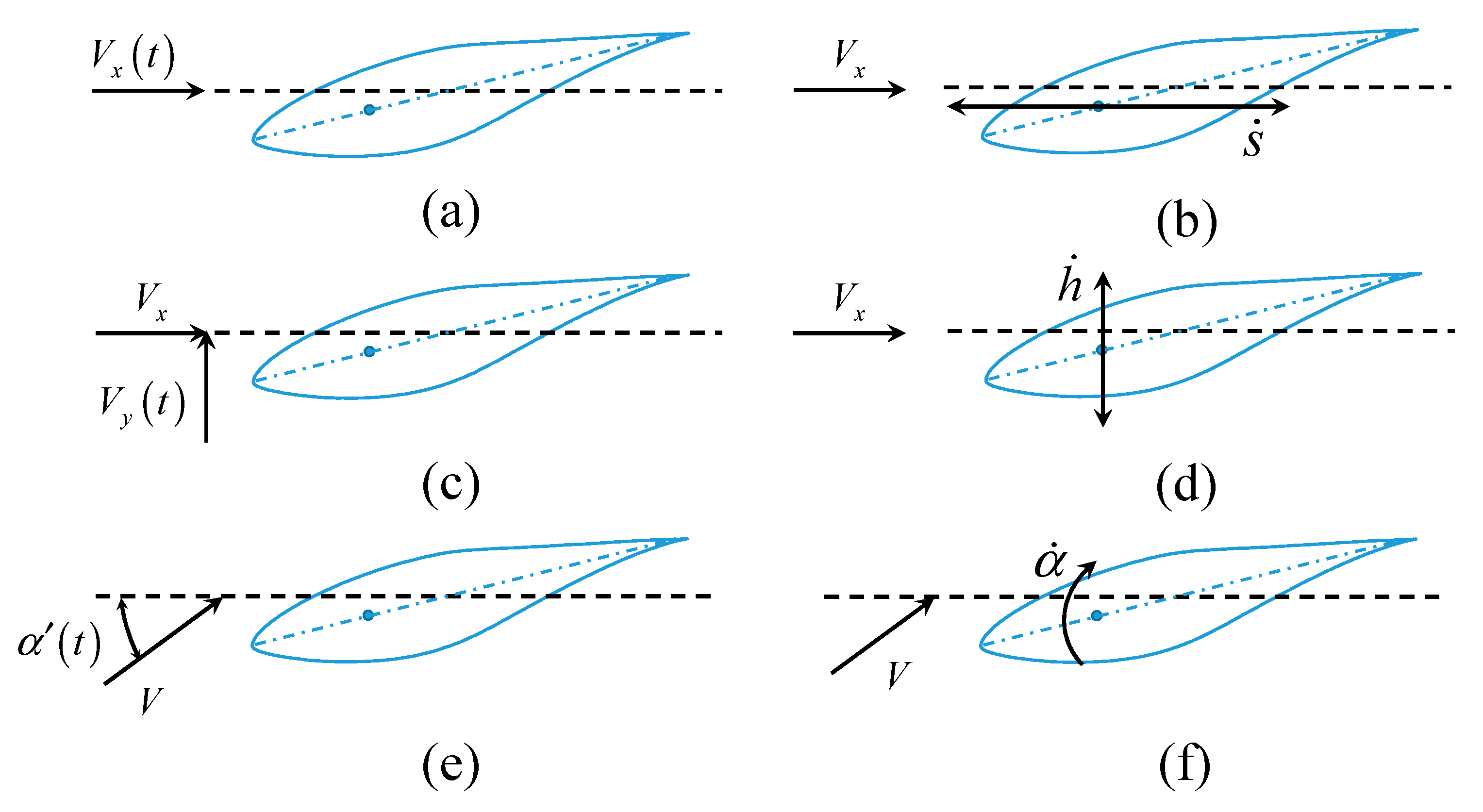
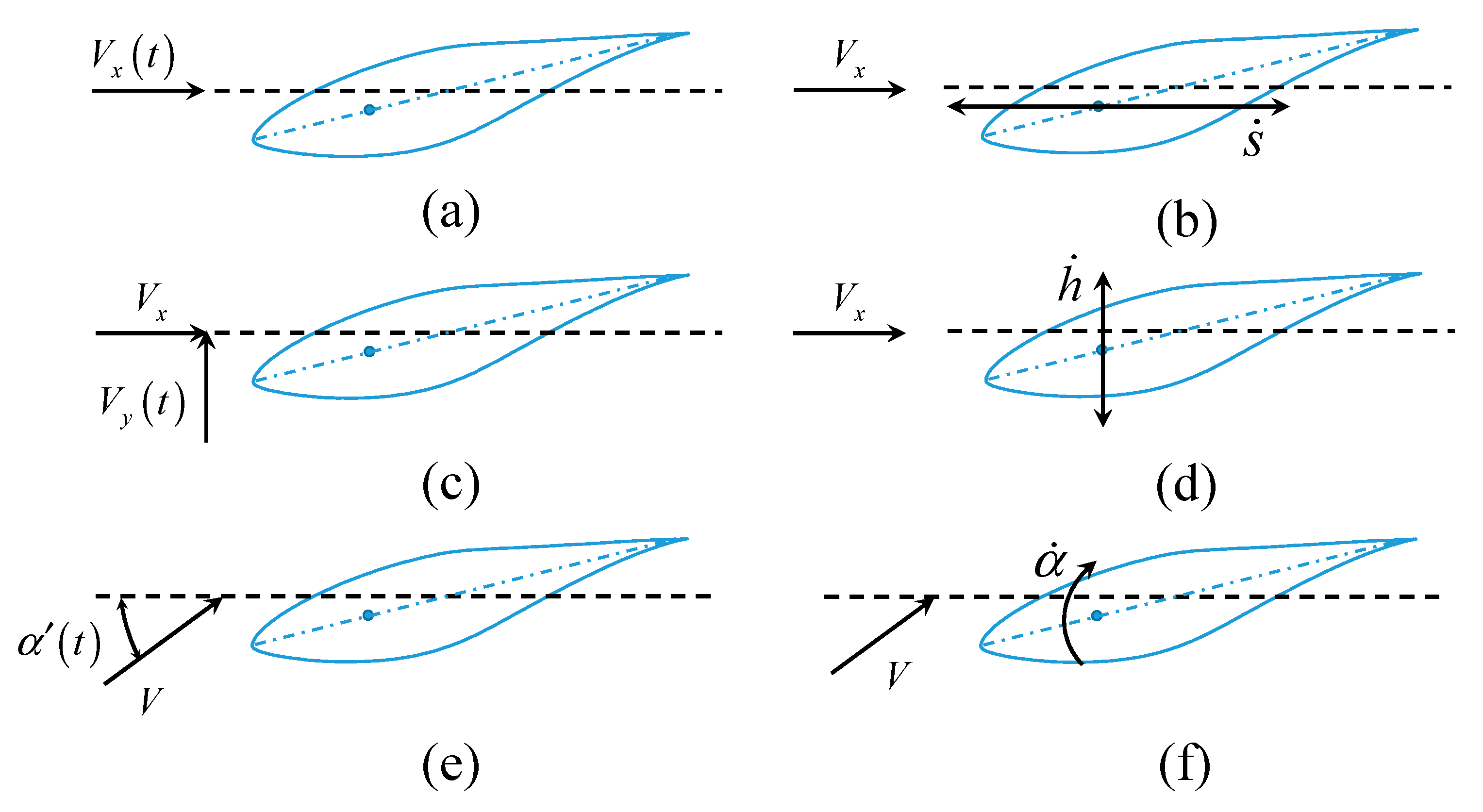
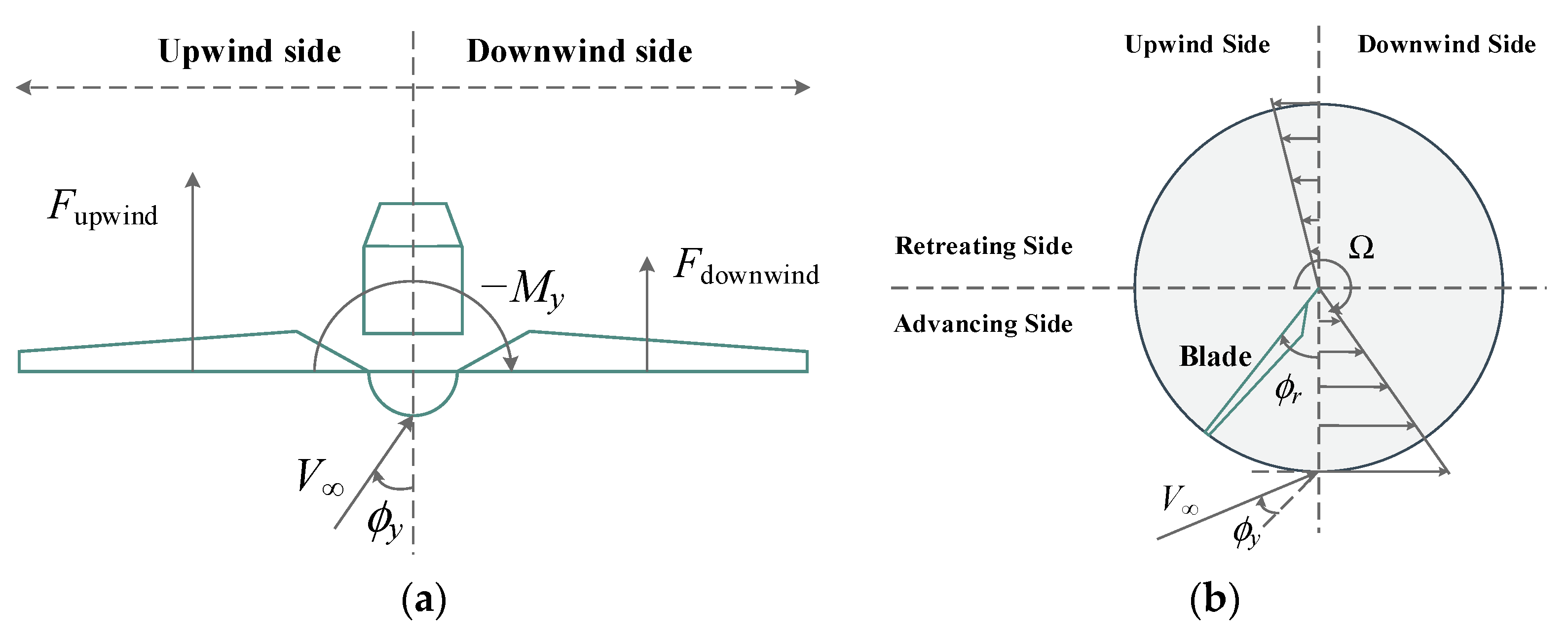
- Thirdly, a periodic AOA change (i.e., oscillating freestream, OF) results from the superposition of rotational velocity and the in-plane freestream velocity component (Figure 1e) under yawed inflow; as a counterpart, pitch oscillation (PO) occurs and affects the effective AOA under blade pitching or elastic bending (Figure 1f).
2. Methodology
2.1. Thin-Airfoil Theoretical Analysis
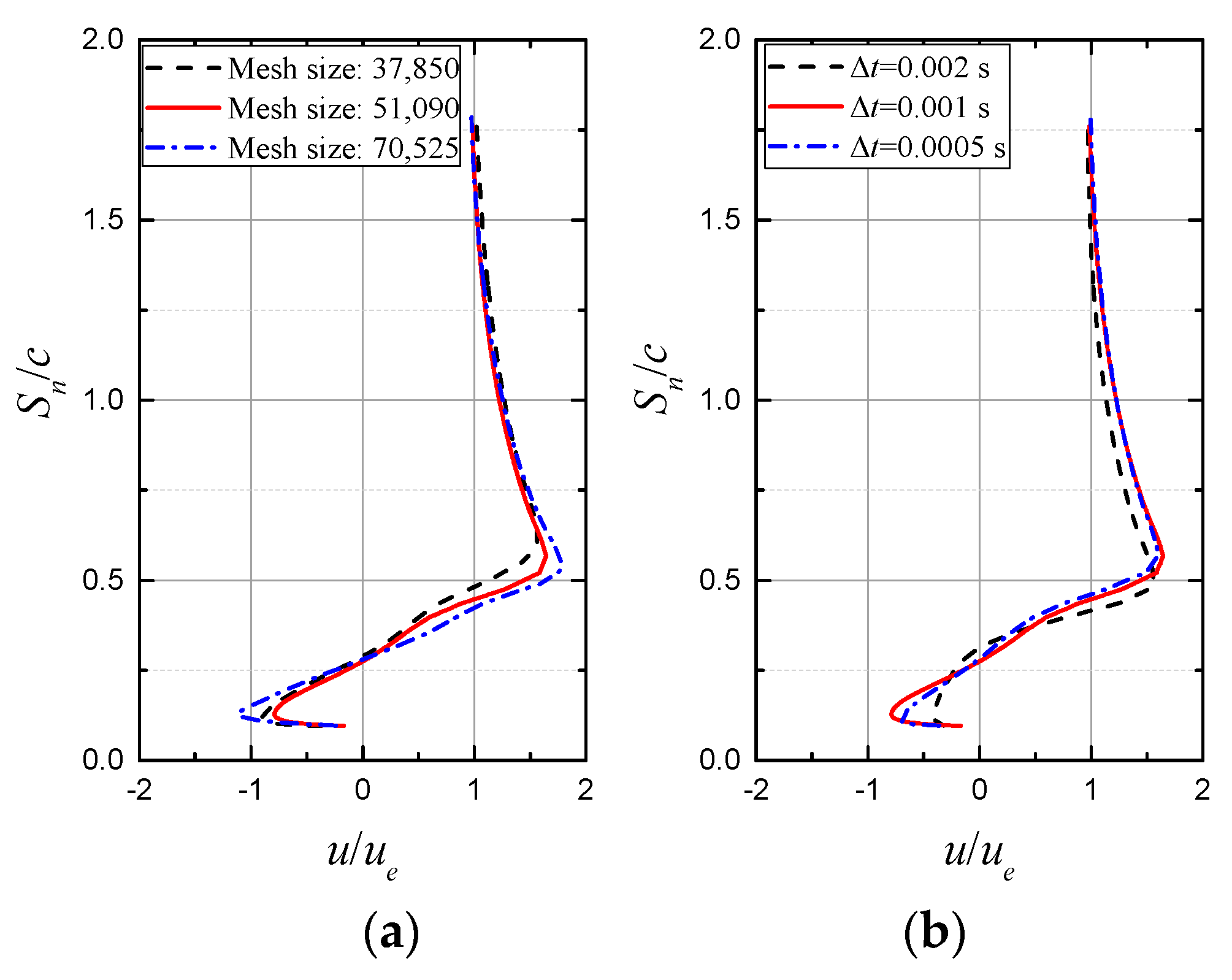
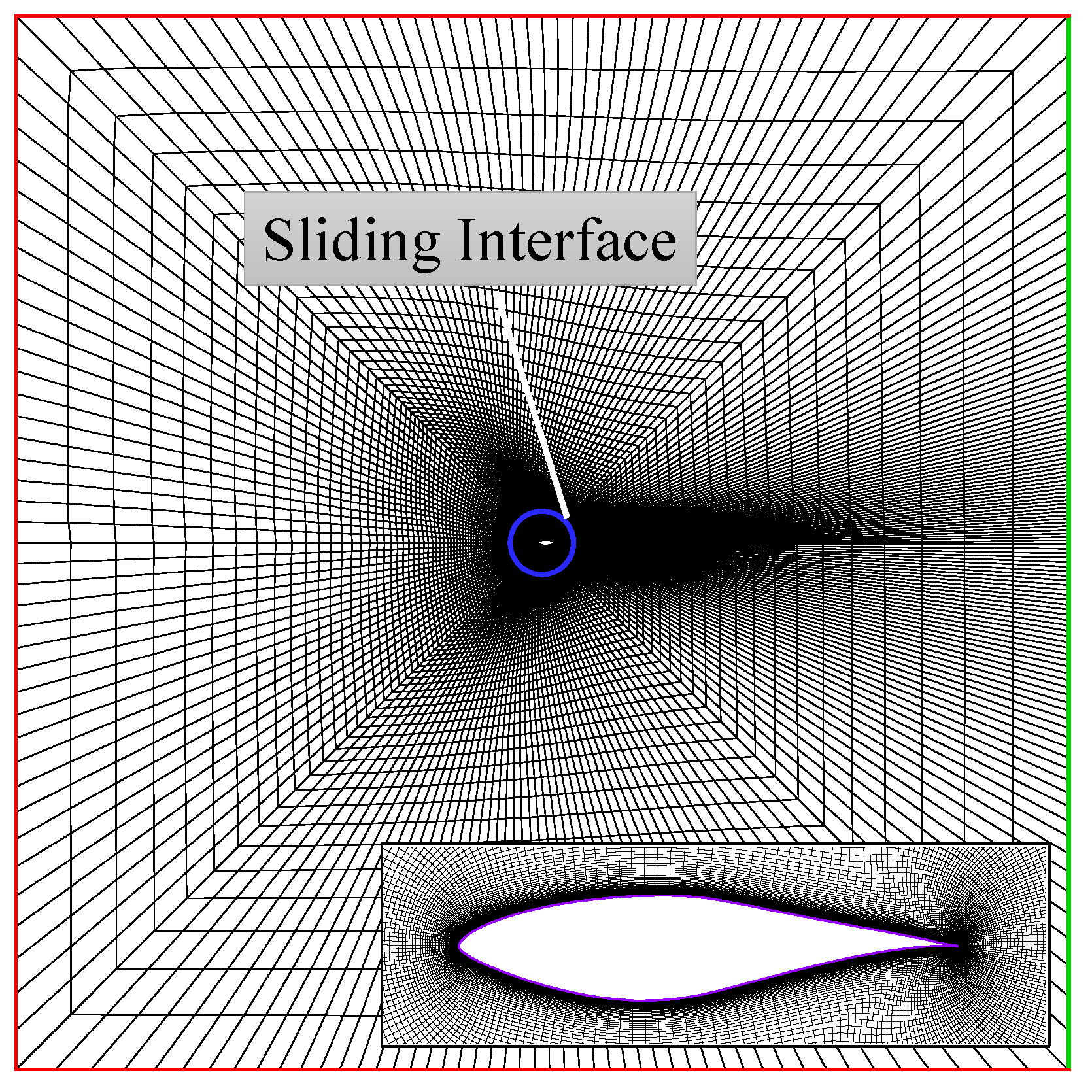
2.2. Numerical Modeling
2.3. Beddoes-Leishman Semi-Empirical Model
2.3.1. Unsteady Attached Flow
2.3.2. Unsteady Separated Flow
2.3.3. Vortex Force
3. Results and Discussion
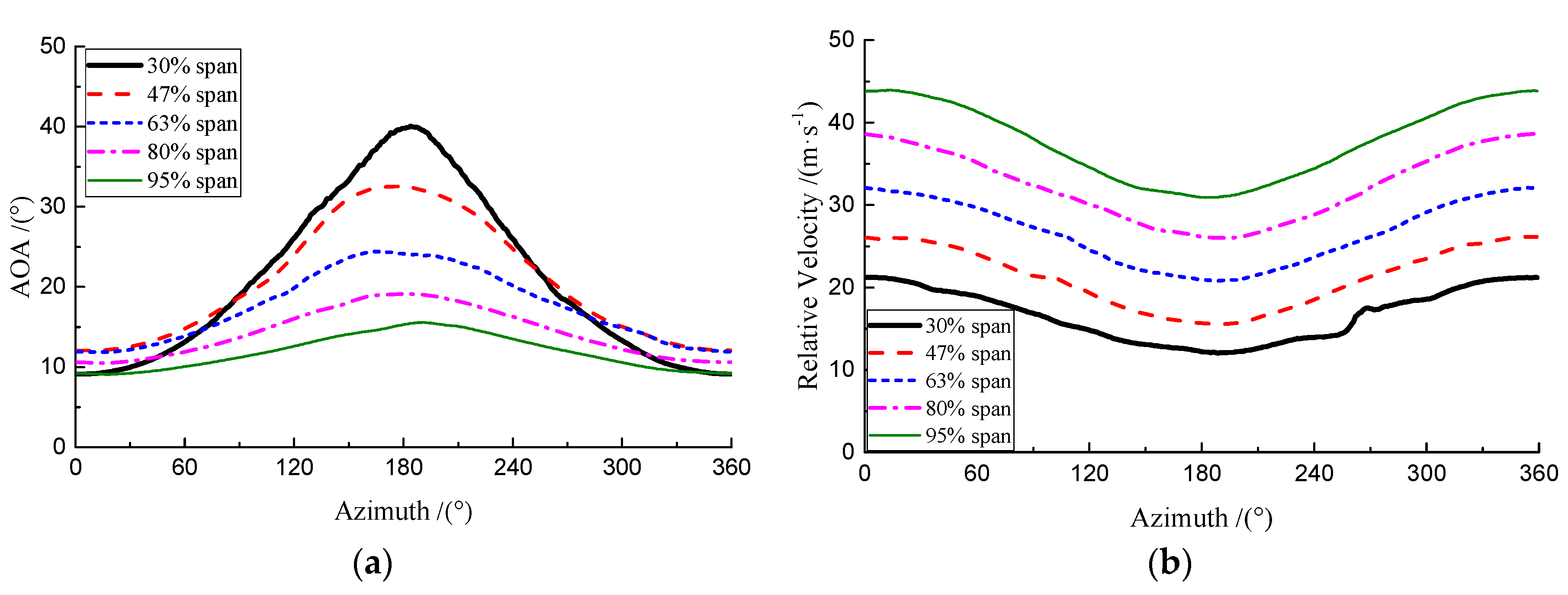
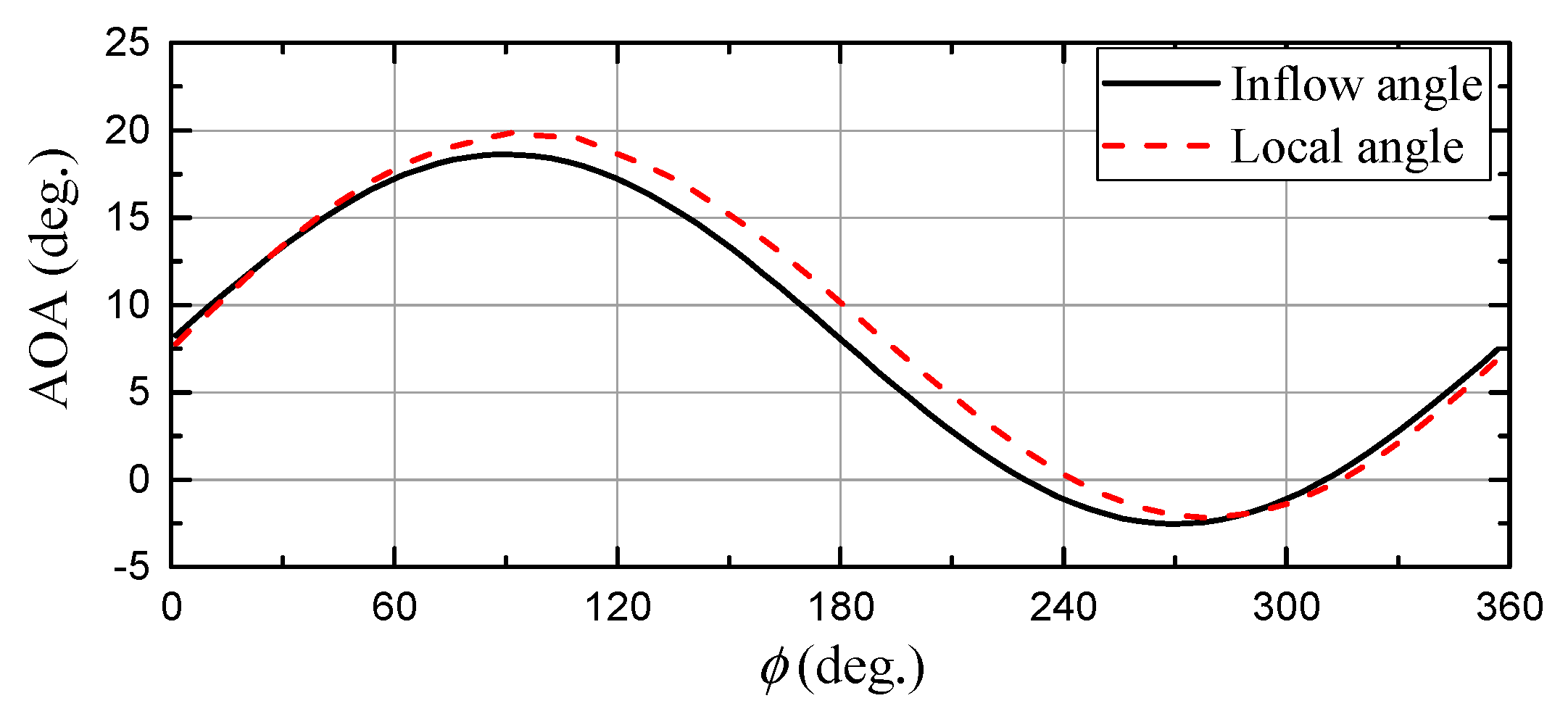
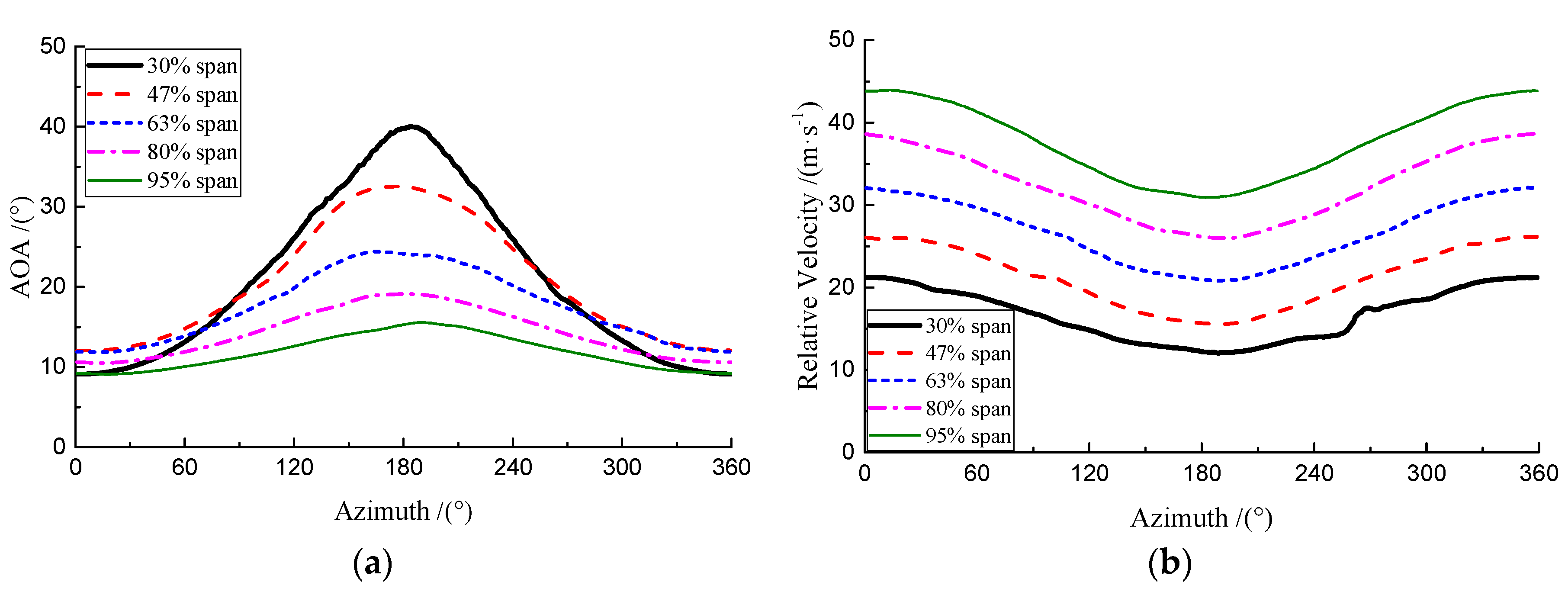
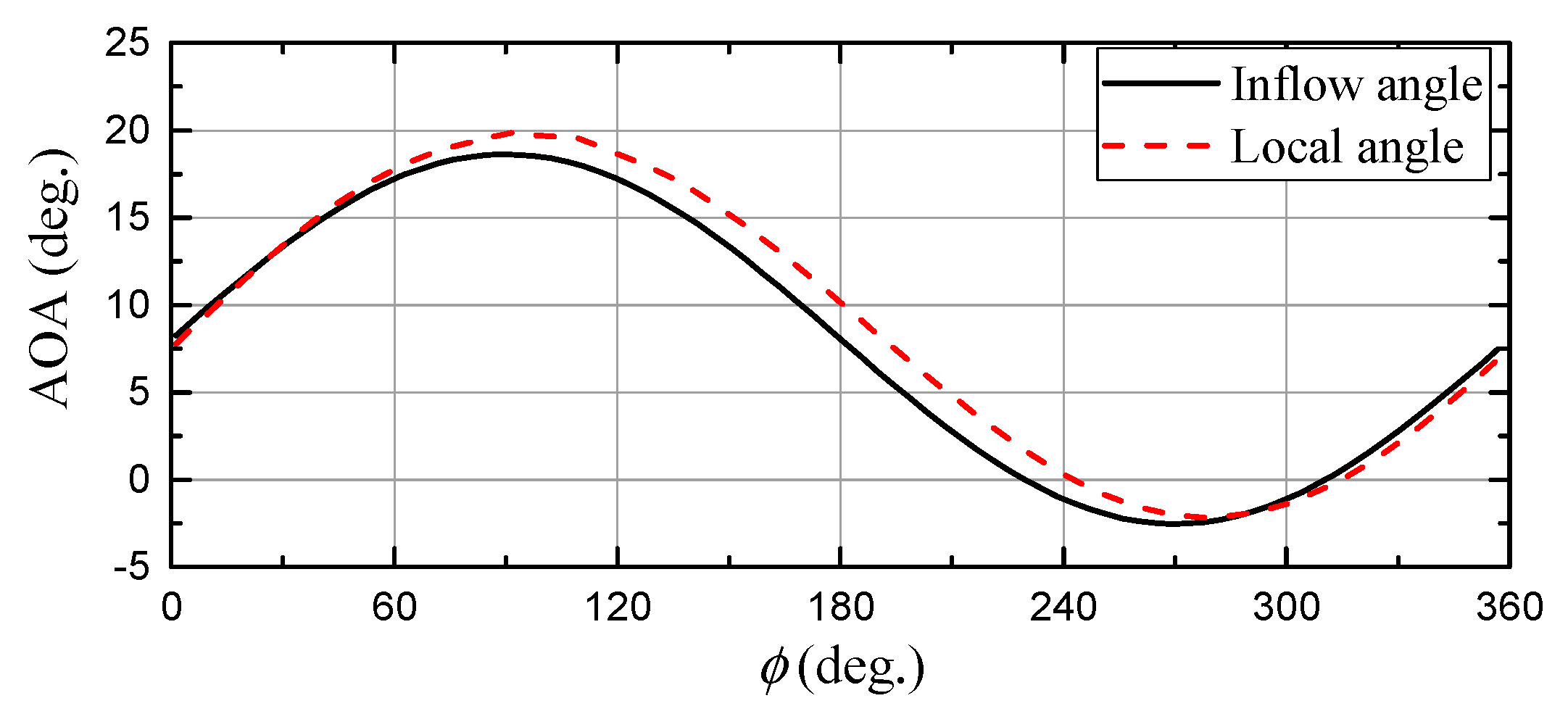
3.1. Time-Varying Sectional Incident Velocity under Yawed Inflow
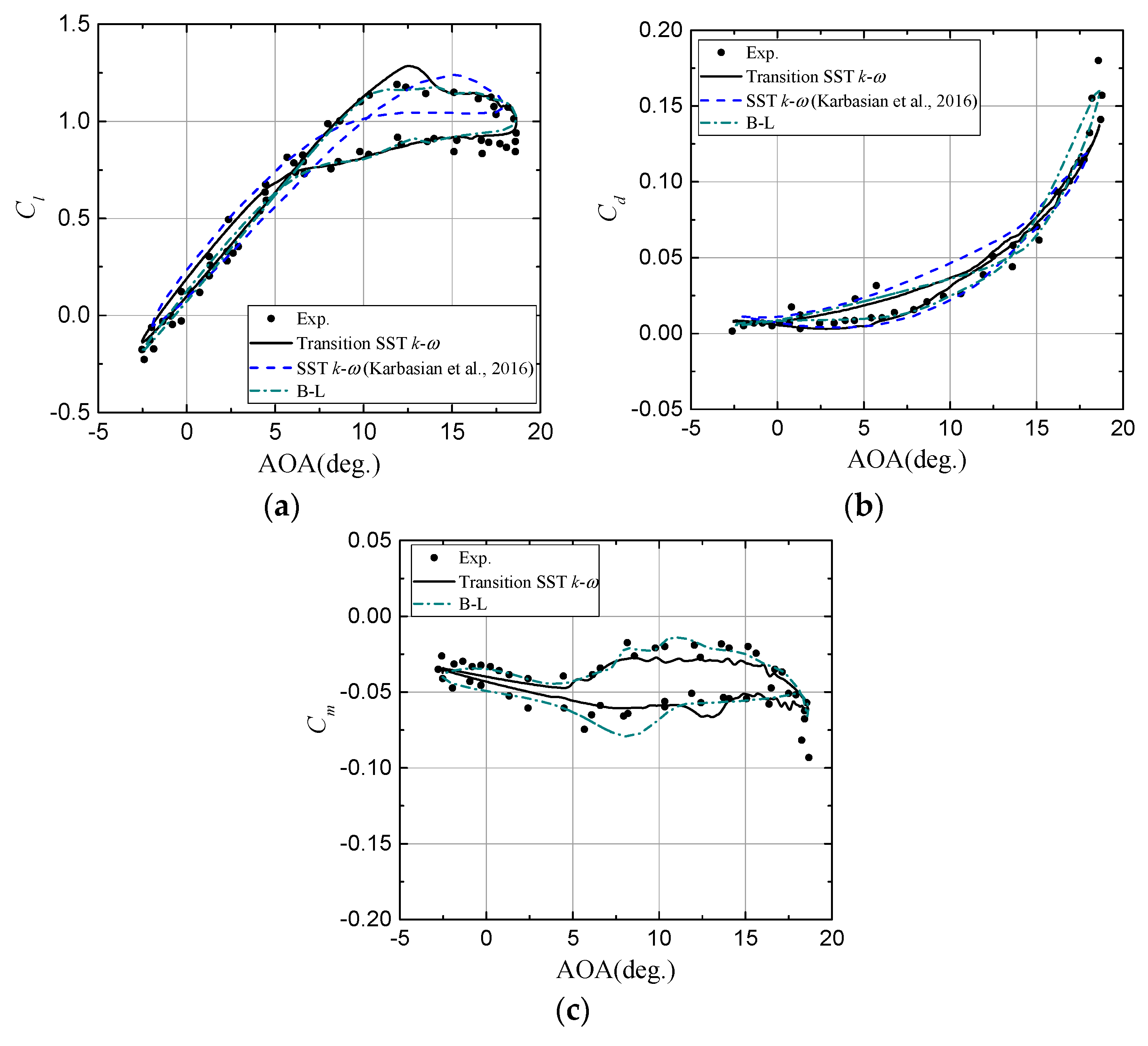
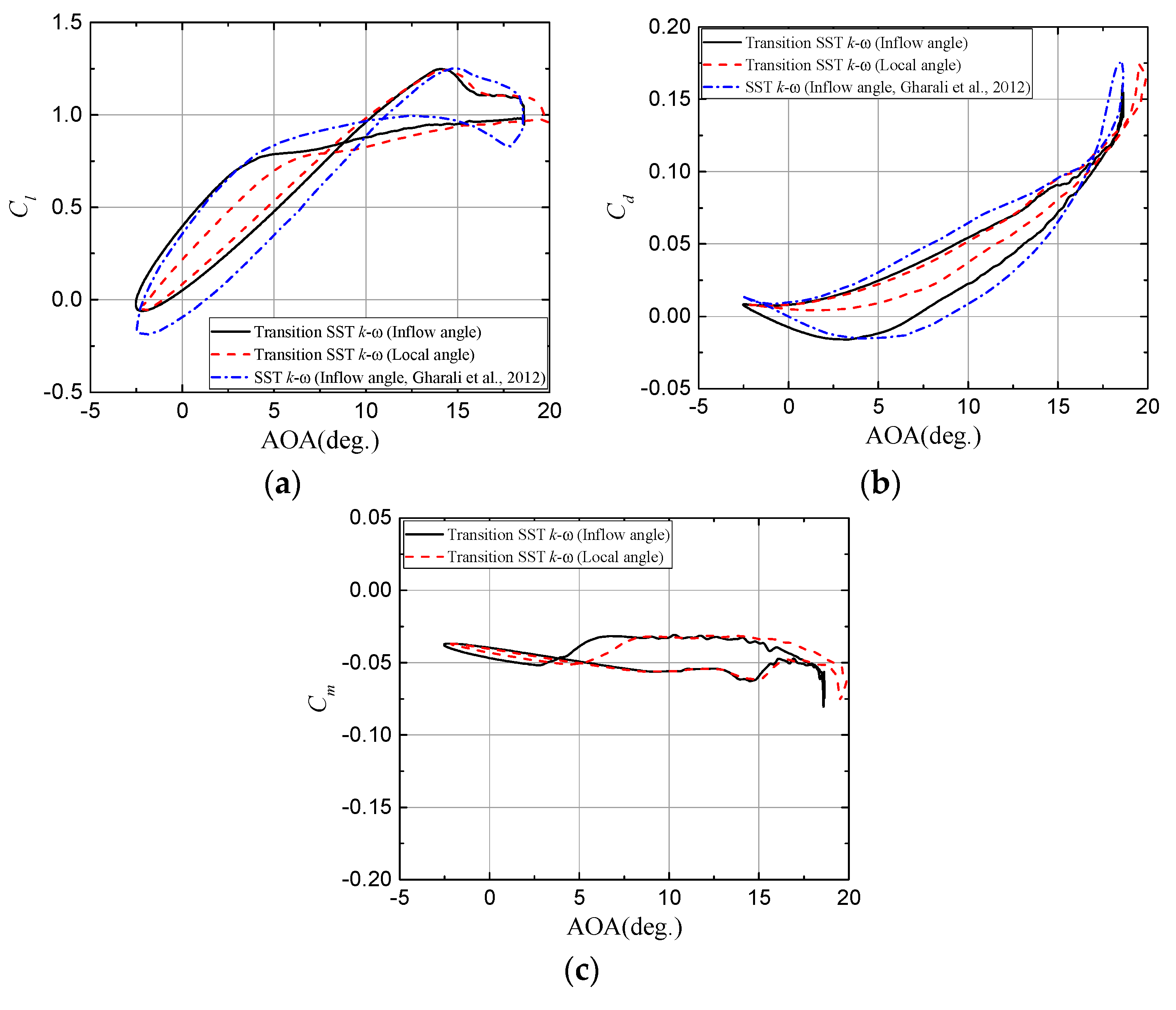
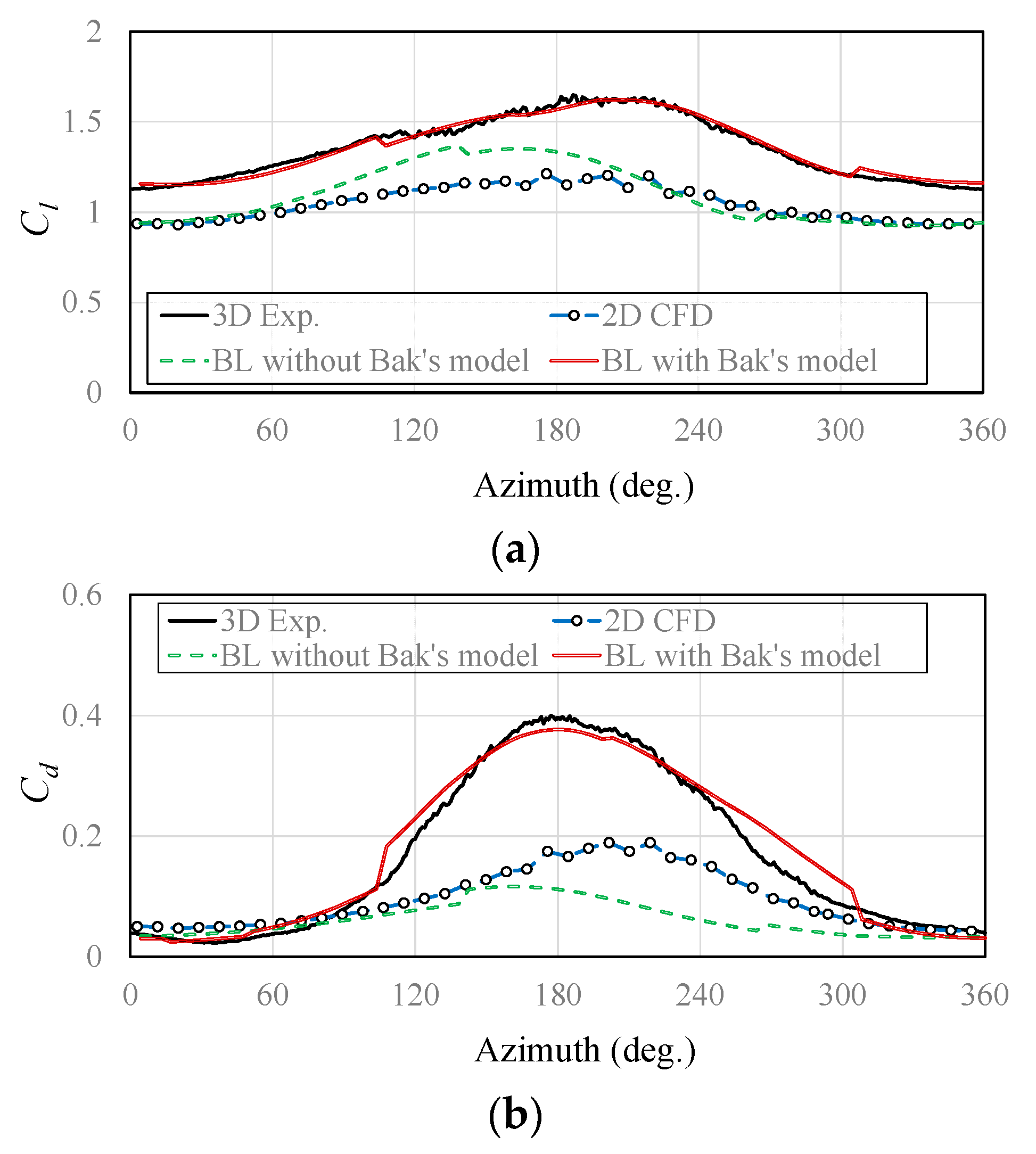
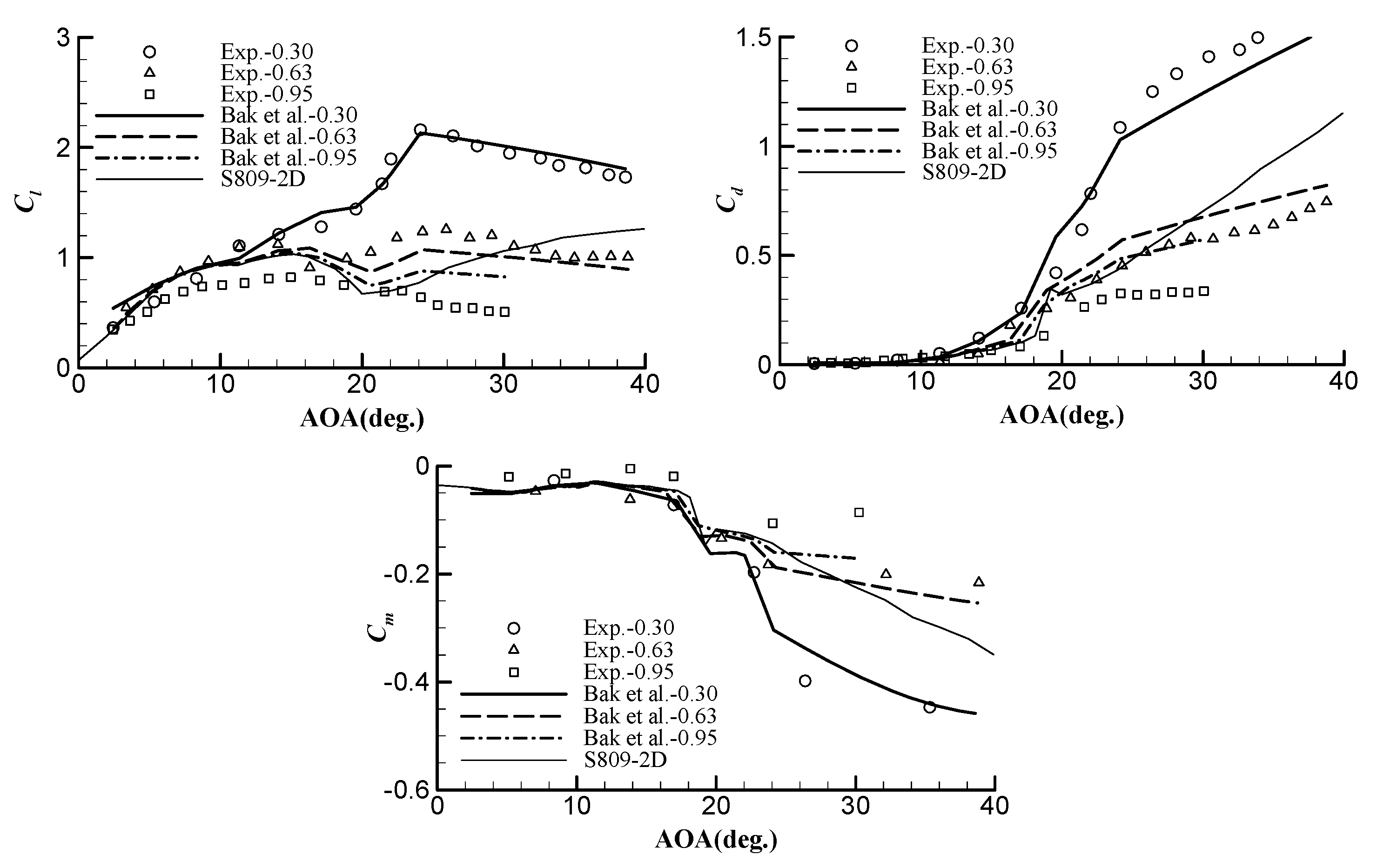
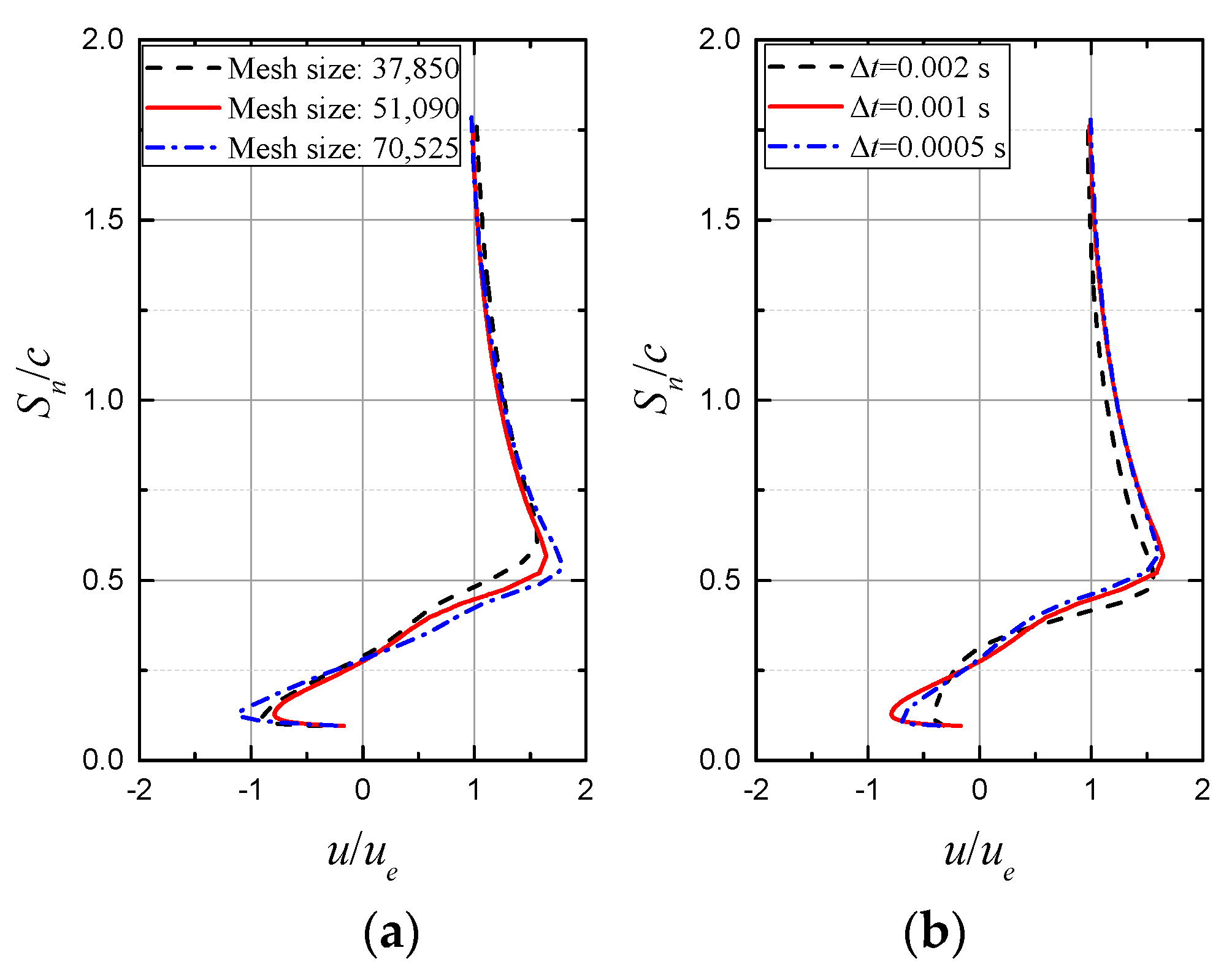
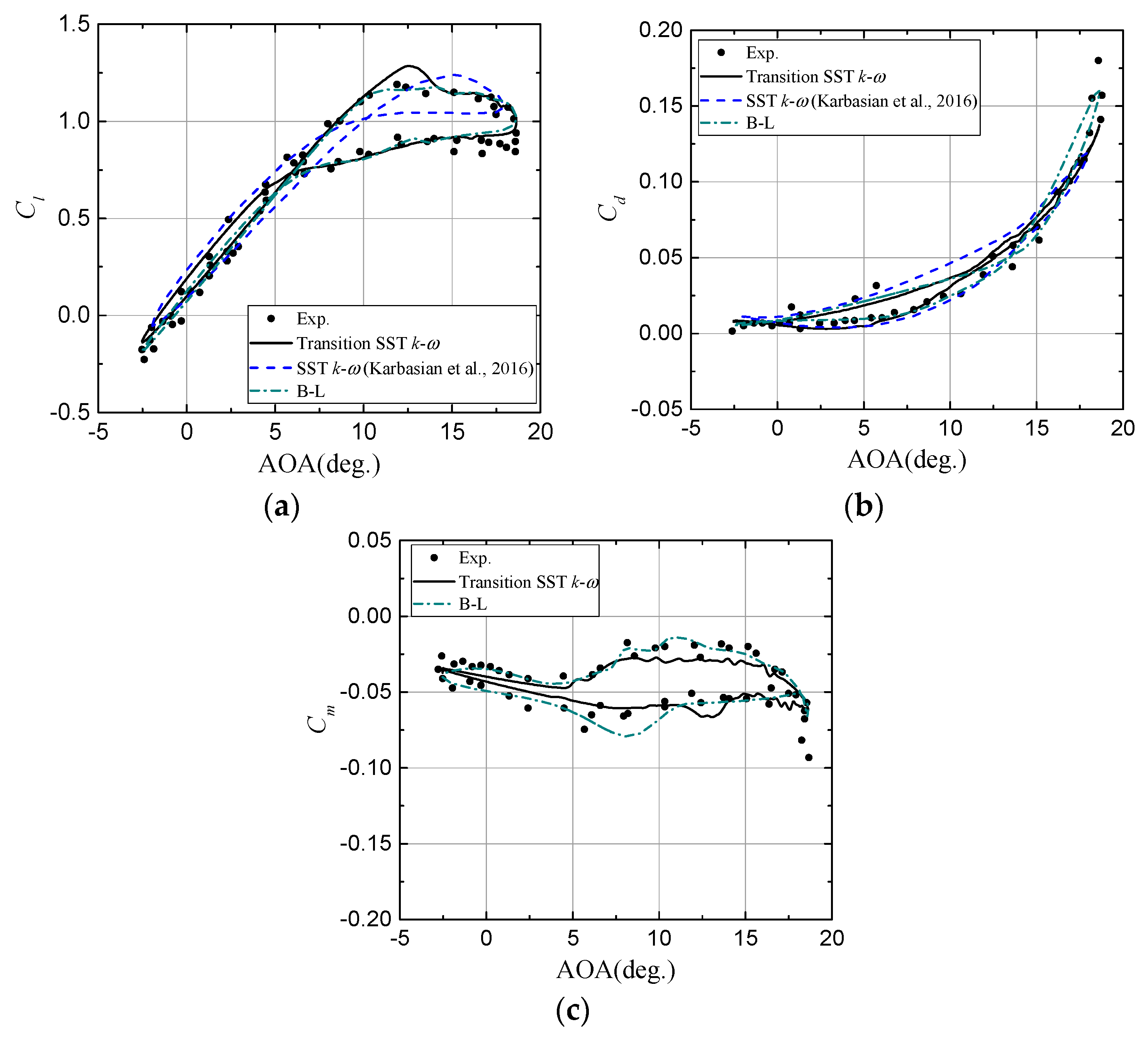
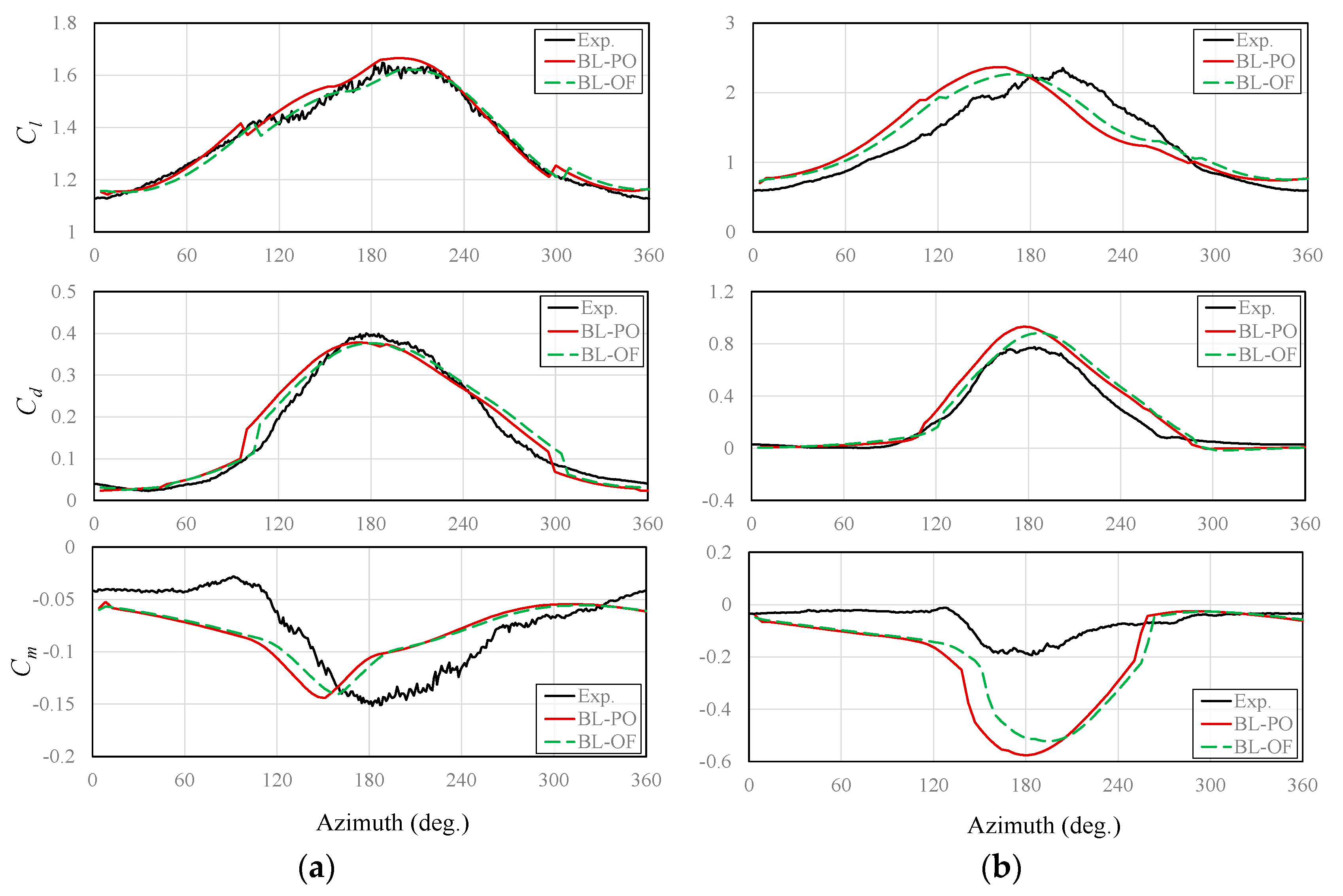
3.2. Validations of Numerical Modeling Methods
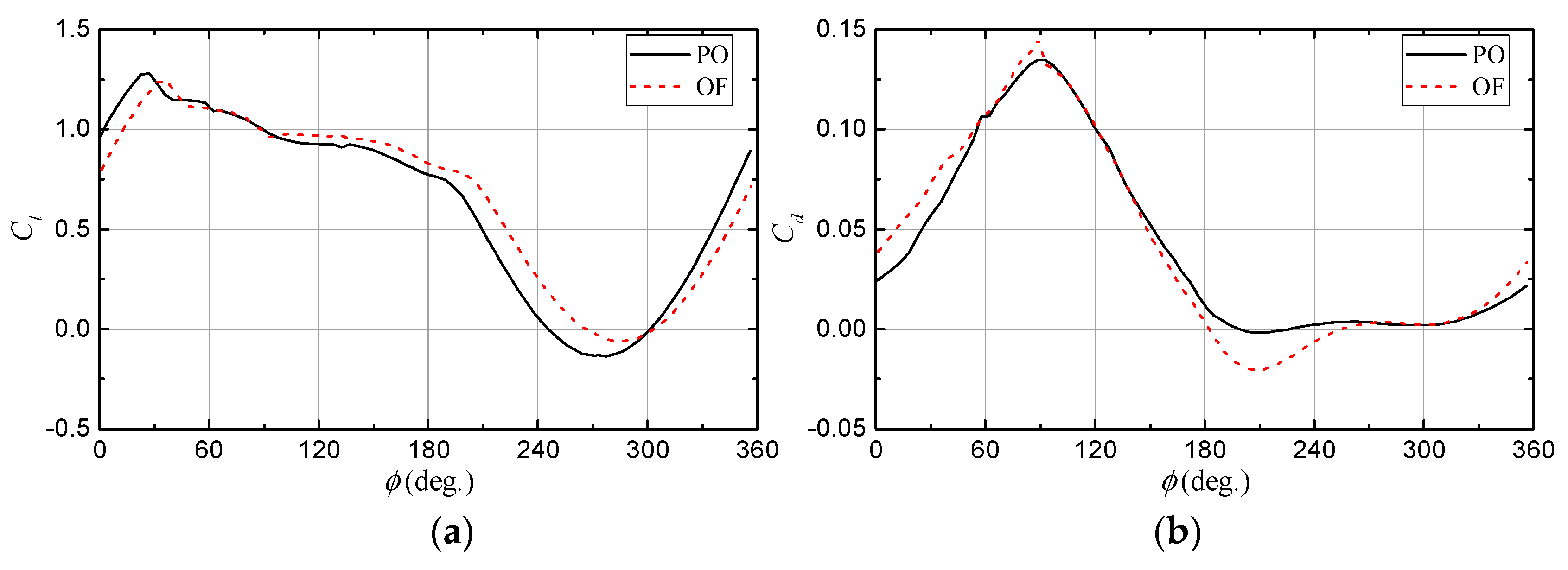
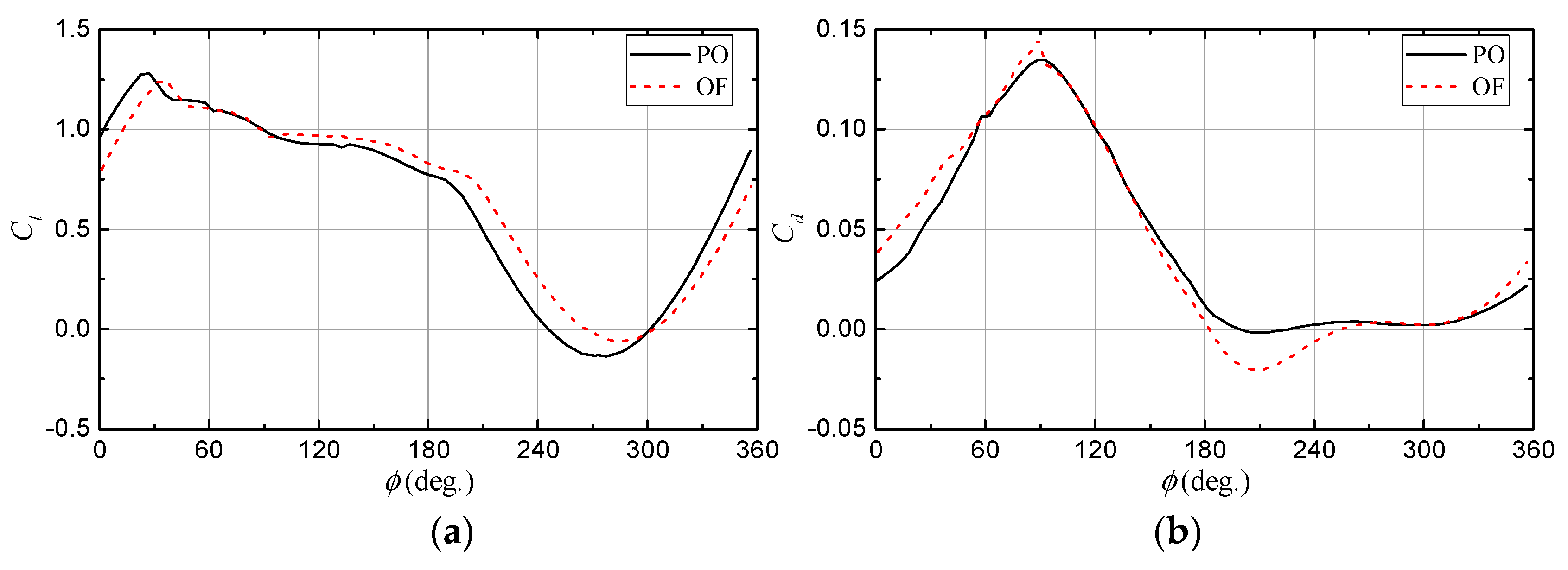
3.3. Equivalence Analysis between Pitch Oscillation and Oscillating Freestream
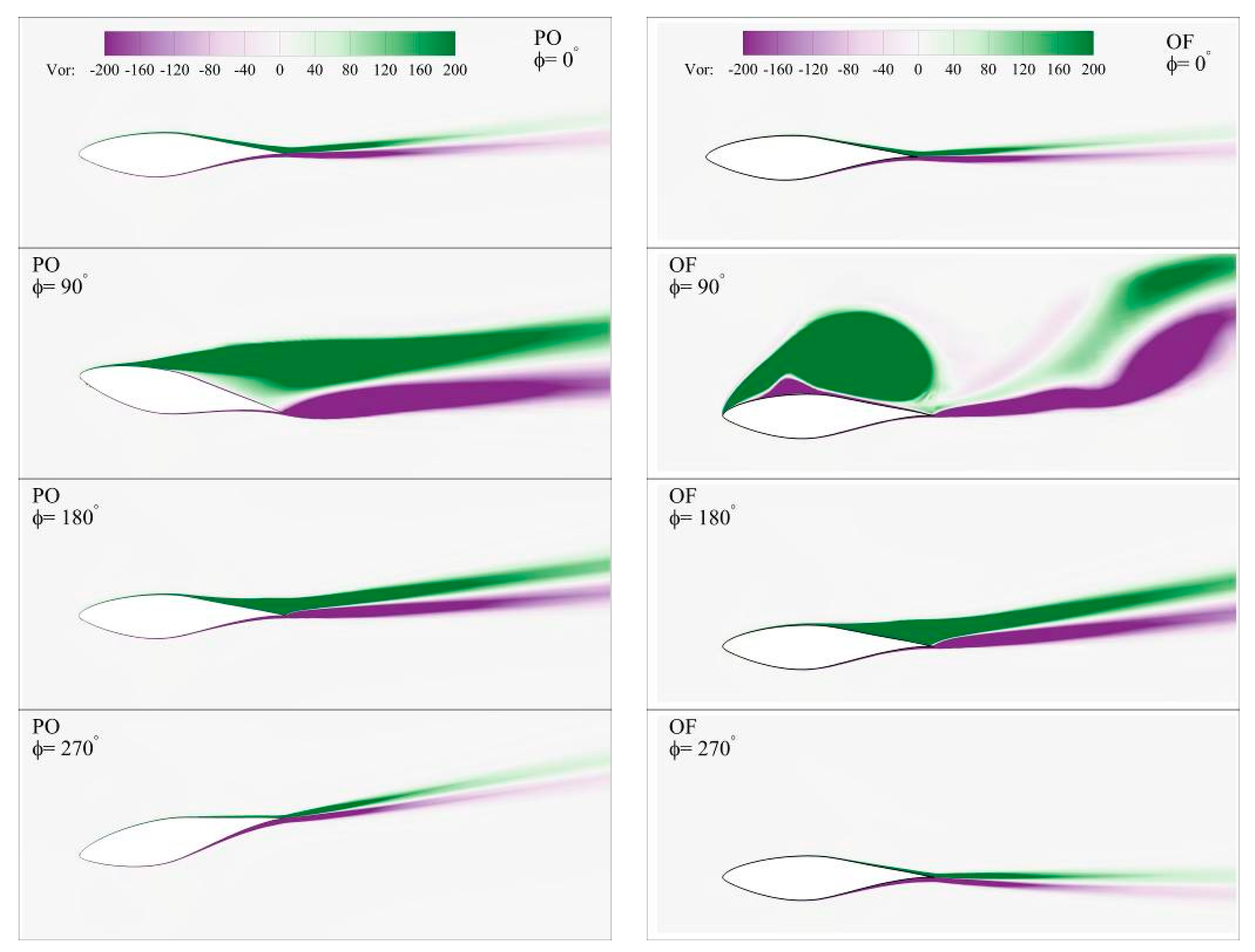
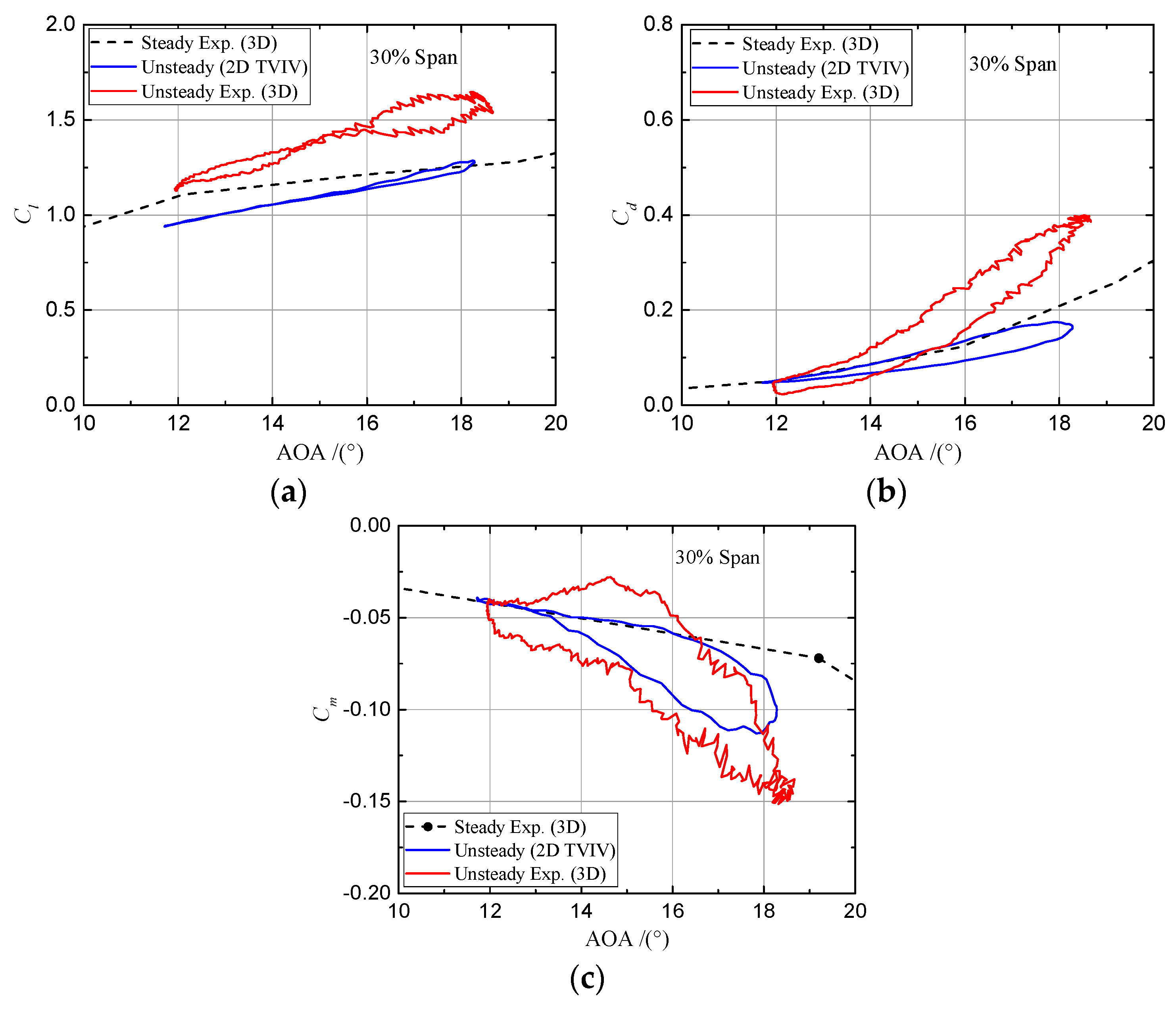
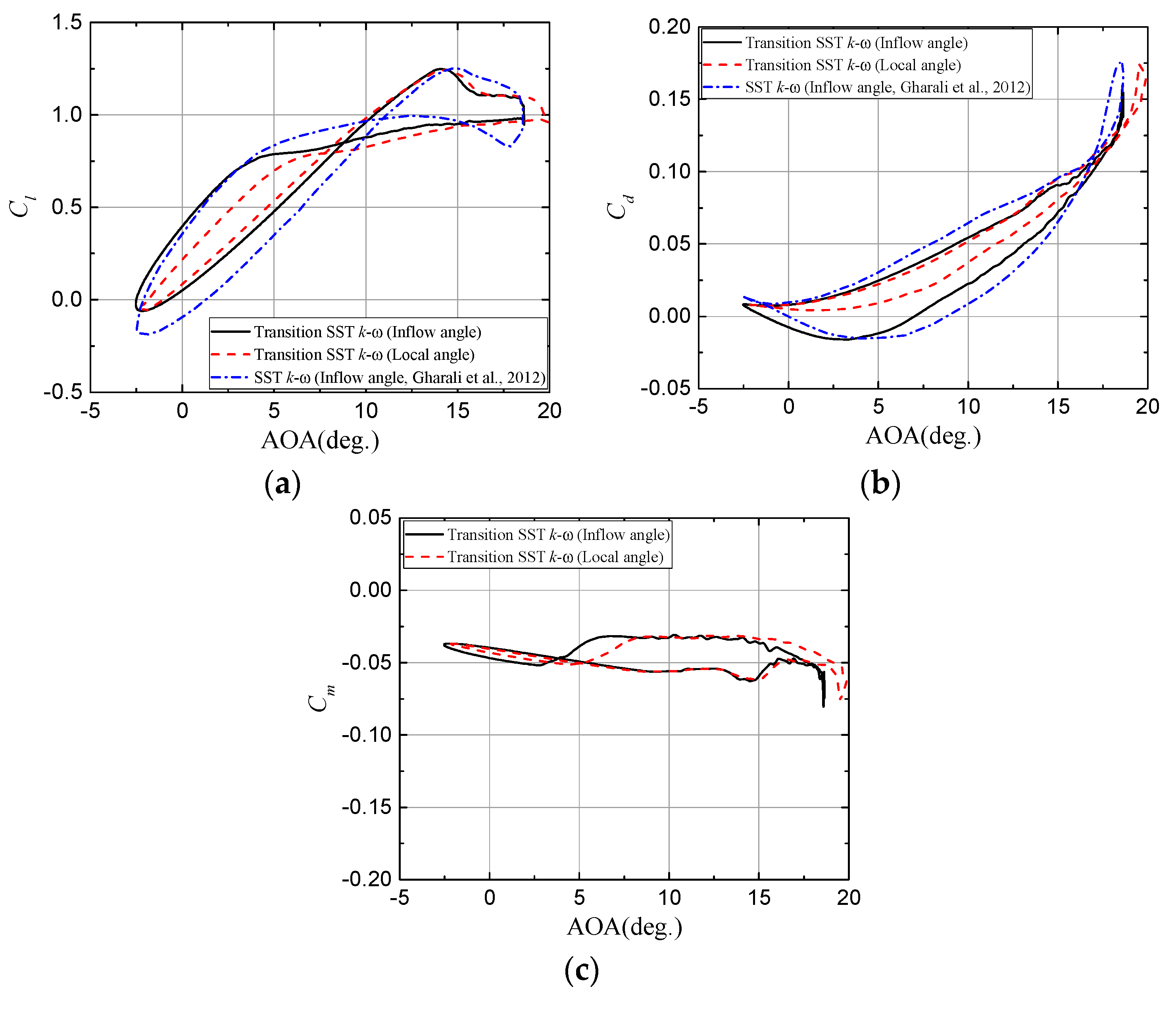
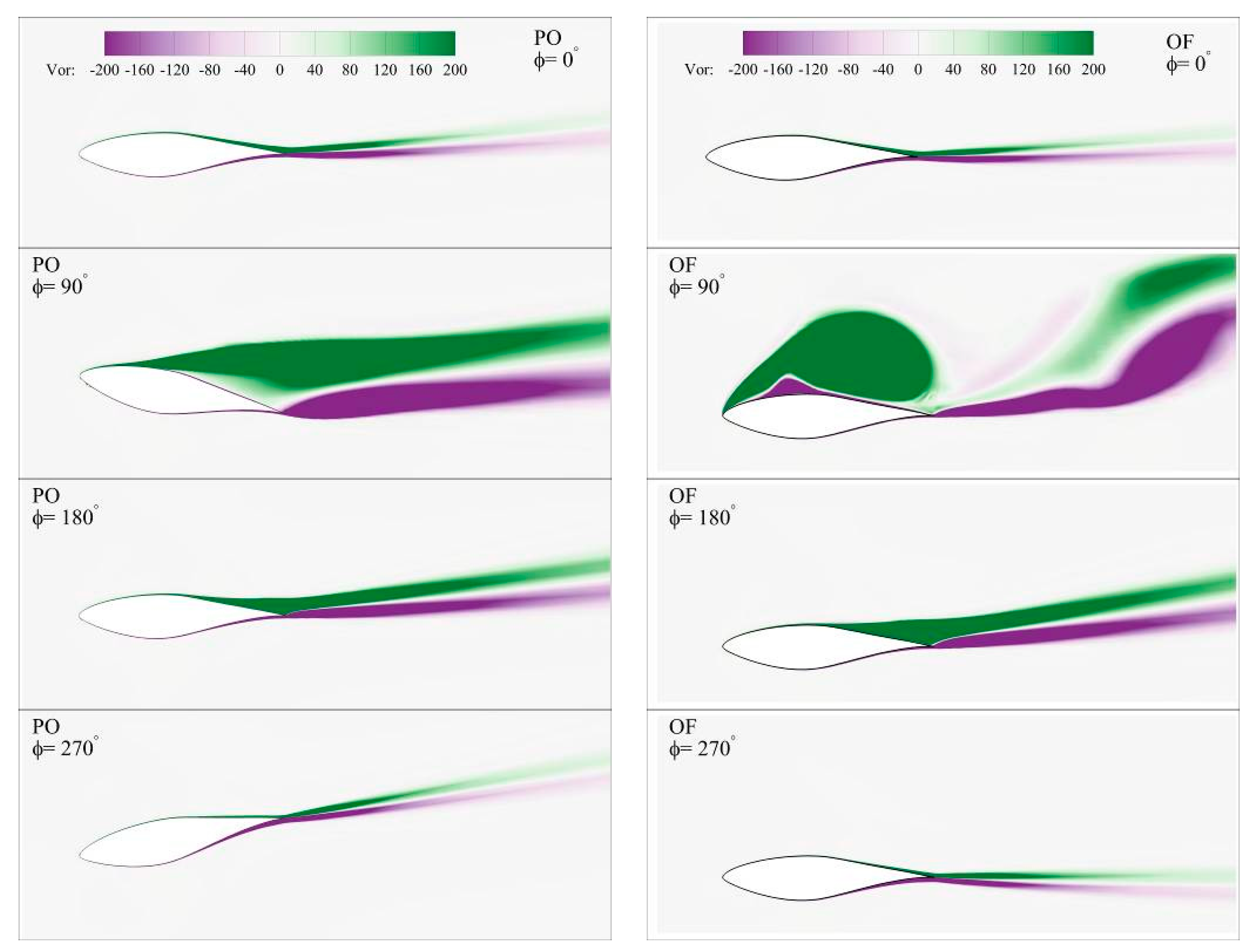
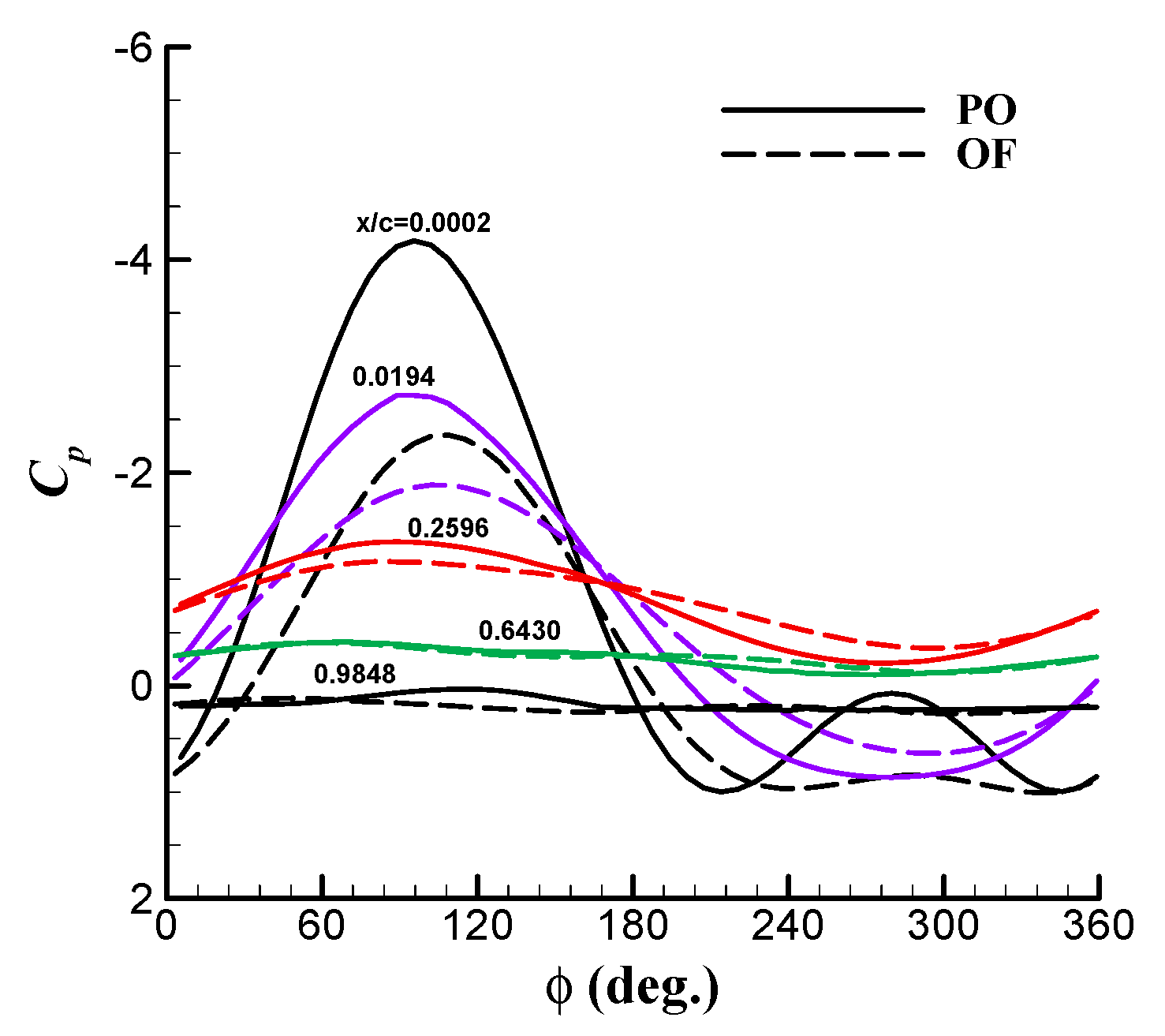
3.4. Comparison of Dynamic Stall in Yawed Condition between the Two Motions
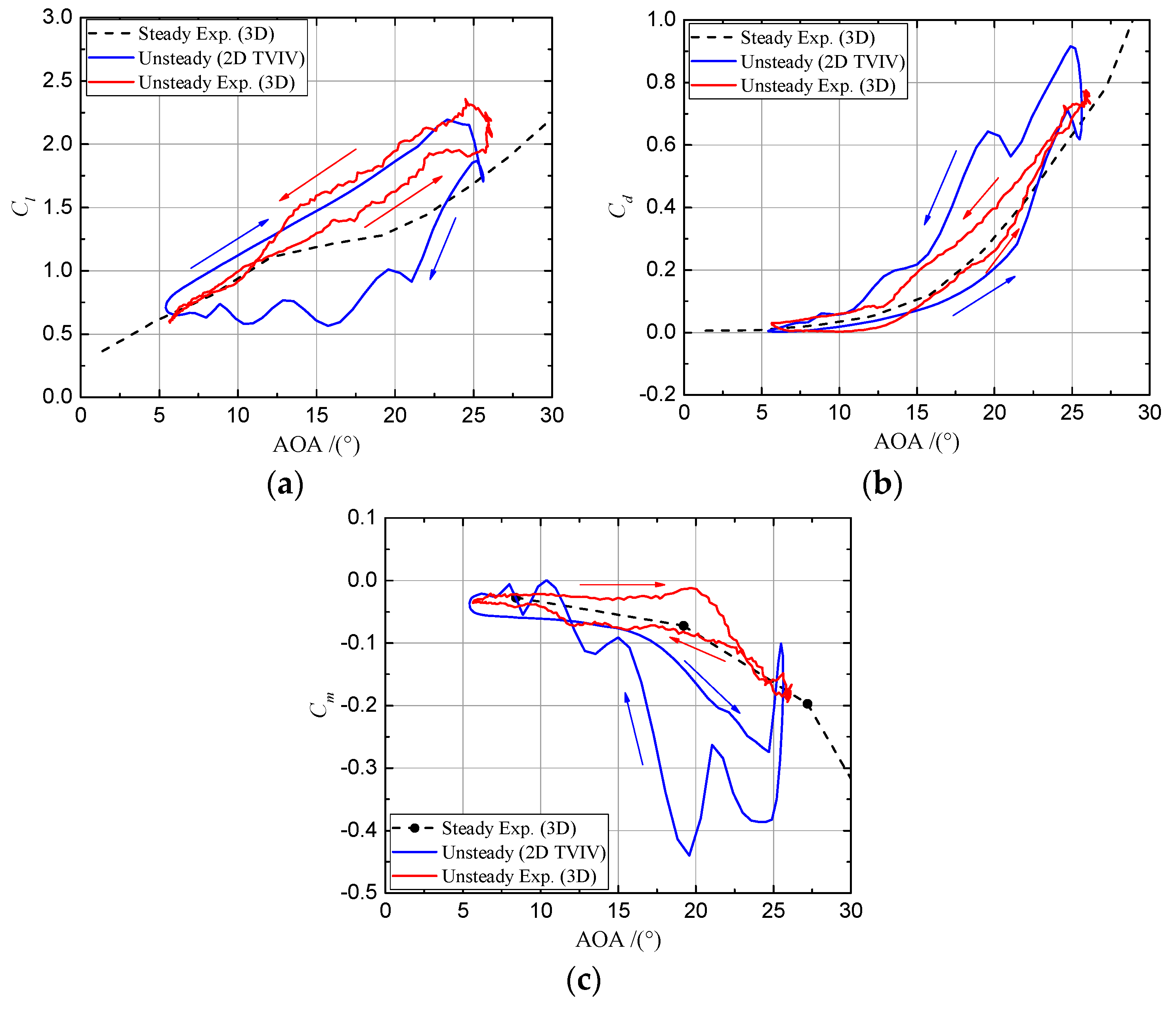
3.5. Effect of Rotational Augmentation on the Dynamic Stall of the Inboard Blade
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Leishman, J.G. Challenges in modelling the unsteady aerodynamics of wind turbines. Wind Energy 2002, 5, 85–132. [Google Scholar] [CrossRef] [Green Version]
- McCroskey, W.J. The Phenomenon of Dynamic Stall; National Aeronautics and Space Administration: Washington, DC, USA, 1981. [Google Scholar]
- Carr, L.W. Progress in analysis and prediction of dynamic stall. J. Aircr. 1988, 25, 6–17. [Google Scholar] [CrossRef]
- Butterfield, C.P. Aerodynamic pressure and flow-visualization measurement from a rotating wind turbine blade. In Proceedings of the Eighth ASME Wind Energy Symposium, Houston, TX, USA, 22–25 January 1989; pp. 245–256. [Google Scholar]
- Leishman, J.G. Principles of Helicopter Aerodynamics, 2nd ed.; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Leishman, J.G.; Beddoes, T.S. A Semi-Empirical Model for Dynamic Stall. J. Am. Helicopter Soc. 1989, 34, 3–17. [Google Scholar] [CrossRef]
- Tran, C.T.; Petot, D. Semi-empirical model for the dynamic stall of airfoils in view of the application to the calculation of responses of a helicopter blade in forward flight. Vertica 1981, 5, 35–53. [Google Scholar]
- Øye, S. Dynamic Stall Simulated as Time Lag of Separation; Technical University of Denmark: Lyngby, Denmark, 1991. [Google Scholar]
- Hansen, M.H.; Gaunaa, M.; Madsen, H.A. A Beddoes-Leishman Type Dynamic Stall Model in State-Space and Indicial Formulation; Risø National laboratory: Roskilde, Denmark, 2004. [Google Scholar]
- Pereira, R.; Schepers, G.; Pavel, M.D. Validation of the Beddoes-Leishman dynamic stall model for horizontal axis wind turbines using MEXICO data. Wind Energy 2013, 16, 207–219. [Google Scholar] [CrossRef]
- Gupta, S.; Leishman, J.G. Dynamic stall modelling of the S809 aerofoil and comparison with experiments. Wind Energy 2006, 9, 521–547. [Google Scholar] [CrossRef]
- Johansen, J. Unsteady Airfoil Flows with Application to Aeroelastic Stability; Risø National laboratory: Roskilde, Denmark, 1999. [Google Scholar]
- Visbal, M.R. Numerical Investigation of Deep Dynamic Stall of a Plunging Airfoil. AIAA J. 2011, 49, 2152–2170. [Google Scholar] [CrossRef]
- Ekaterinaris, J.A.; Platzer, M.F. Computational prediction of airfoil dynamic stall. Prog. Aeosp. Sci. 1998, 33, 759–846. [Google Scholar] [CrossRef] [Green Version]
- Menter, F.R. Two-Equation Eddy-Viscosity Transport Turbulence Model for Engineering Applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Van der Wall, B.G.; Leishman, J.G. On the Influence of Time-Varying Flow Velocity on Unsteady Aerodynamics. J. Am. Helicopter Soc. 1994, 39, 25–36. [Google Scholar] [CrossRef]
- Karbasian, H.R.; Esfahani, J.A.; Barati, E. Effect of acceleration on dynamic stall of airfoil in unsteady operating conditions. Wind Energy 2016, 19, 17–33. [Google Scholar] [CrossRef]
- Snel, H.; Houwink, R.; Bosschers, J. Sectional Prediction of Lift Coefficients on Rotating Wind Turbine Blades in Stall; Energy Research Center of the Netherlands: Petten, The Netherlands, 1993. [Google Scholar]
- Chaviaropoulos, P.K.; Hansen, M.O.L. Investigating three-dimensional and rotational effects on wind turbine blades by means of a quasi-3D Navier-Stokes solver. J. Fluids Eng. Trans. ASME 2000, 122, 330–336. [Google Scholar] [CrossRef]
- Du, Z.; Selig, M. A 3-D stall-delay model for horizontal axis wind turbine performance prediction. In Proceedings of the 36th AIAA Aerospace Sciences Meeting and Exhibit, 1998 ASME Wind Energy Symposium, Reno, NV, USA, 12–15 January 1998. [Google Scholar]
- Raj, N.V. An Improved Semi-Empirical Model for 3-D Post-Stall Effects in Horizontal Axis Wind Turbines; University of Illinois: Urbana-Champaign, IL, USA, 2000. [Google Scholar]
- Bak, C.; Johansen, J.; Andersen, P.B. Three-Dimensional Corrections of Airfoil Characteristics Based on Pressure Distributions. In Proceedings of the European Wind Energy Conference and Exhibition (EWEC), Athens, Greece, 27 February–2 March 2006. [Google Scholar]
- Corrigan, J.J.; Schillings, J.J. Emprical Model for Stall Delay Due to Rotation. In Proceedings of the American Helicopter Society Aeromechanics Specialists Conference, San Francisco, CA, USA, 19–21 January 1994. [Google Scholar]
- Lindenburg, C. Investigation into Rotor Blade Aerodynamics; Energy research Centre of the Netherlands Petten: Petten, The Netherlands, 2003. [Google Scholar]
- Breton, S.P.; Coton, F.N.; Moe, G. A Study on Rotational Effects and Different Stall Delay Models Using i a Prescribed Wake Vortex Scheme and NREL Phase VI Experiment Data. Wind Energy 2008, 11, 459–482. [Google Scholar] [CrossRef]
- Zahle, F.; Bak, C.; Guntur, S.; Soslashrensen, N.N.; Troldborg, N. Comprehensive aerodynamic analysis of a 10 MW wind turbine rotor using 3D CFD. In Proceedings of the 32nd ASME Wind Energy Symposium, National Harbor, MD, USA, 13–17 January 2014; p. 15. [Google Scholar]
- Bangga, G.; Lutz, T.; Jost, E.; Kramer, E. CFD studies on rotational augmentation at the inboard sections of a 10 MW wind turbine rotor. J. Renew. Sustain. Energy 2017, 9, 023304. [Google Scholar] [CrossRef]
- Bangga, G.; Yusik, K.; Lutz, T.; Weihing, P.; Kramer, E. Investigations of the inflow turbulence effect on rotational augmentation by means of CFD. J. Phys. Conf. Ser. 2016, 753, 022026. [Google Scholar] [CrossRef]
- Somers, D.M. Design and Experimental Results for the S809 Airfoil; National Renewable Energy Laboratory: Golden, CO, USA, 1997. [Google Scholar]
- Hand, M.M.; Simms, D.A.; Fingersh, L.J.; Jager, D.W.; Cotrell, J.R.; Schreck, S.J.; Larwood, S.M. Unsteady Aerodynamics Experiment Phase VI: Wind Tunnel Test Configurations and Available Data Campaigns; National Renewable Energy Laboratory: Golden, CO, USA, 2001. [Google Scholar]
- Menter, F.R.; Langtry, R.B.; Likki, S.R.; Suzen, Y.B.; Huang, P.G.; Volker, S. A correlation-based transition model using local variables—Part I: Model formulation. J. Turbomach. Trans. ASME 2006, 128, 413–422. [Google Scholar] [CrossRef]
- Glauert, H. The Elements of Airfoil and Airscrew Theory; Cambridge University Press: Cambridge, UK, 1947. [Google Scholar]
- ANSYS Inc. FLUENT Theory Guide, Release 16.0; ANSYS Inc.: Canonsburg, PA, USA, 2015. [Google Scholar]
- Van Leer, B. Towards the ultimate conservative difference scheme. V. A second-order sequel to Godunov’s method. J. Comput. Phys. 1979, 32, 101–136. [Google Scholar] [CrossRef]
- Balduzzi, F.; Bianchini, A.; Maleci, R.; Ferrara, G.; Ferrari, L. Critical issues in the CFD simulation of Darrieus wind turbines. Renew. Energy 2016, 85, 419–435. [Google Scholar] [CrossRef]
- Guntur, S.; Sørensen, N.N. An evaluation of several methods of determining the local angle of attack on wind turbine blades. In Science of Making Torque from Wind 2012; Iop Publishing Ltd.: Bristol, UK, 2014; Volume 555. [Google Scholar]
- Guntur, S.; Sørensen, N.N.; Schreck, S.; Bergami, L. Modeling dynamic stall on wind turbine blades under rotationally augmented flow fields. Wind Energy 2016, 19, 383–397. [Google Scholar] [CrossRef]
- Guntur, S.; Bak, C.; Sørensen, N.N. Analysis of 3D Stall Models for Wind Turbine Blades Using Data from the MEXICO Experiment. In Proceedings of the 13th International Conference on Wind Engineering, Amsterdam, The Netherlands, 10–15 July 2012. [Google Scholar]
- Schepers, J.G. IEA Annex XX: Comparison between Calculations and Measurements on a Wind Turbine in Yaw in the NASA-Ames Wind Tunnel; Energy Research Center of the Netherlands: Petten, The Netherlands, 2007. [Google Scholar]
- Ramsay, R.F.; Hoffman, M.J.; Gregorek, G.M. Effects of Grit Roughness and Pitch Oscillation on the S809 Airfoil; National Renewable Energy Laboratory: Golden, Co, USA, 1995. [Google Scholar]
- Gharali, K.; Johnson, D.A. Numerical modeling of an S809 airfoil under dynamic stall, erosion and high reduced frequencies. Appl. Energy 2012, 93, 45–52. [Google Scholar] [CrossRef]
- Guntur, S.; Sorensen, N.N. A study on rotational augmentation using CFD analysis of flow in the inboard region of the MEXICO rotor blades. Wind Energy 2015, 18, 745–756. [Google Scholar]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, C.; Wang, T. Comparative Study of Dynamic Stall under Pitch Oscillation and Oscillating Freestream on Wind Turbine Airfoil and Blade. Appl. Sci. 2018, 8, 1242. https://doi.org/10.3390/app8081242
Zhu C, Wang T. Comparative Study of Dynamic Stall under Pitch Oscillation and Oscillating Freestream on Wind Turbine Airfoil and Blade. Applied Sciences. 2018; 8(8):1242. https://doi.org/10.3390/app8081242
Chicago/Turabian StyleZhu, Chengyong, and Tongguang Wang. 2018. "Comparative Study of Dynamic Stall under Pitch Oscillation and Oscillating Freestream on Wind Turbine Airfoil and Blade" Applied Sciences 8, no. 8: 1242. https://doi.org/10.3390/app8081242
APA StyleZhu, C., & Wang, T. (2018). Comparative Study of Dynamic Stall under Pitch Oscillation and Oscillating Freestream on Wind Turbine Airfoil and Blade. Applied Sciences, 8(8), 1242. https://doi.org/10.3390/app8081242