Adaptive Noise Cancellation Based on Time Delay Estimation for Low Frequency Communication


Abstract
1. Introduction
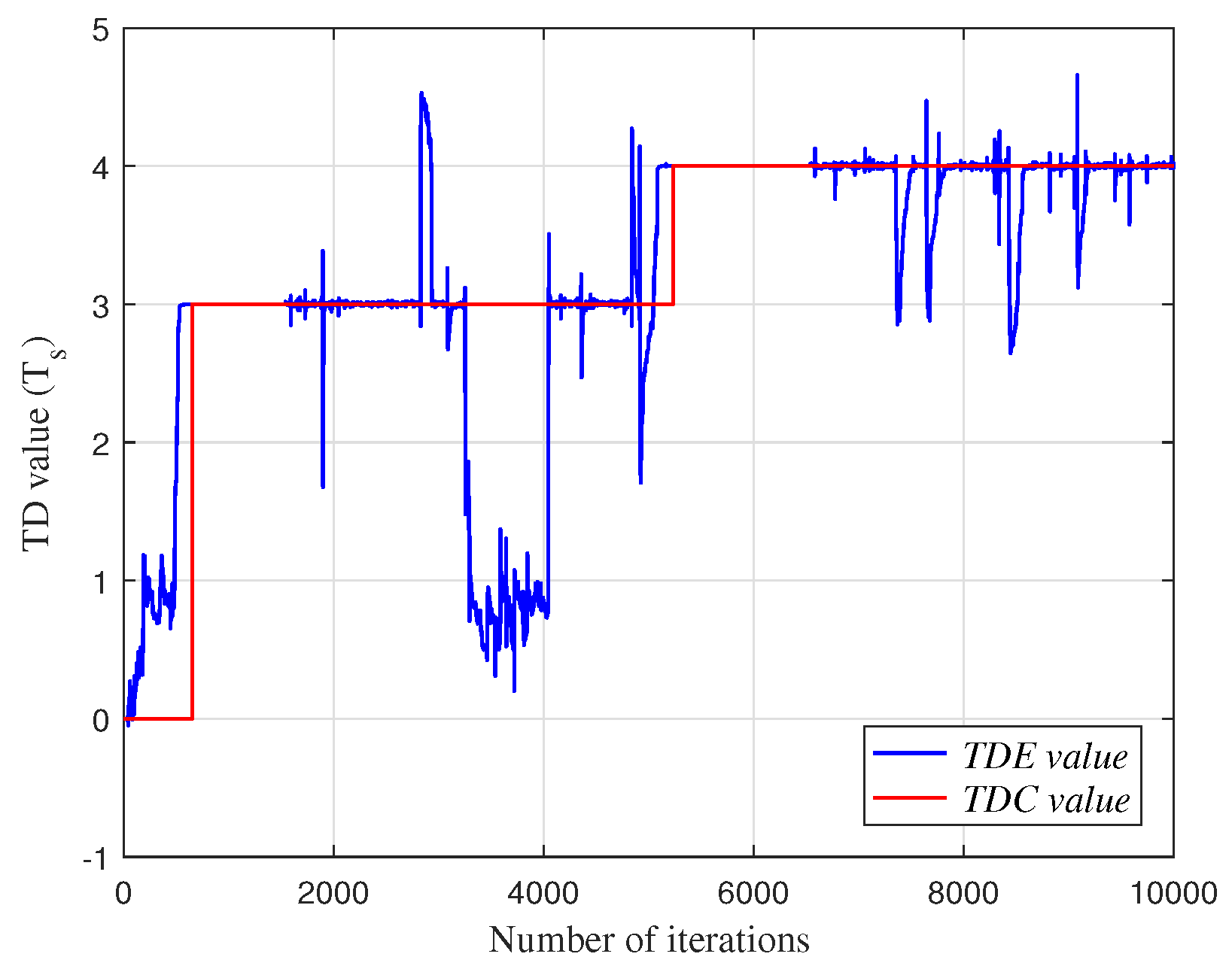
- An adaptive noise cancellation algorithm is proposed based on time delay estimation. The convergence performance of the ETDE algorithm is used to measure the correlationship between the reference inputs and the primary input. The reference input will be selected as the reference noise only when the time delay estimation value of this input has the smallest variance.
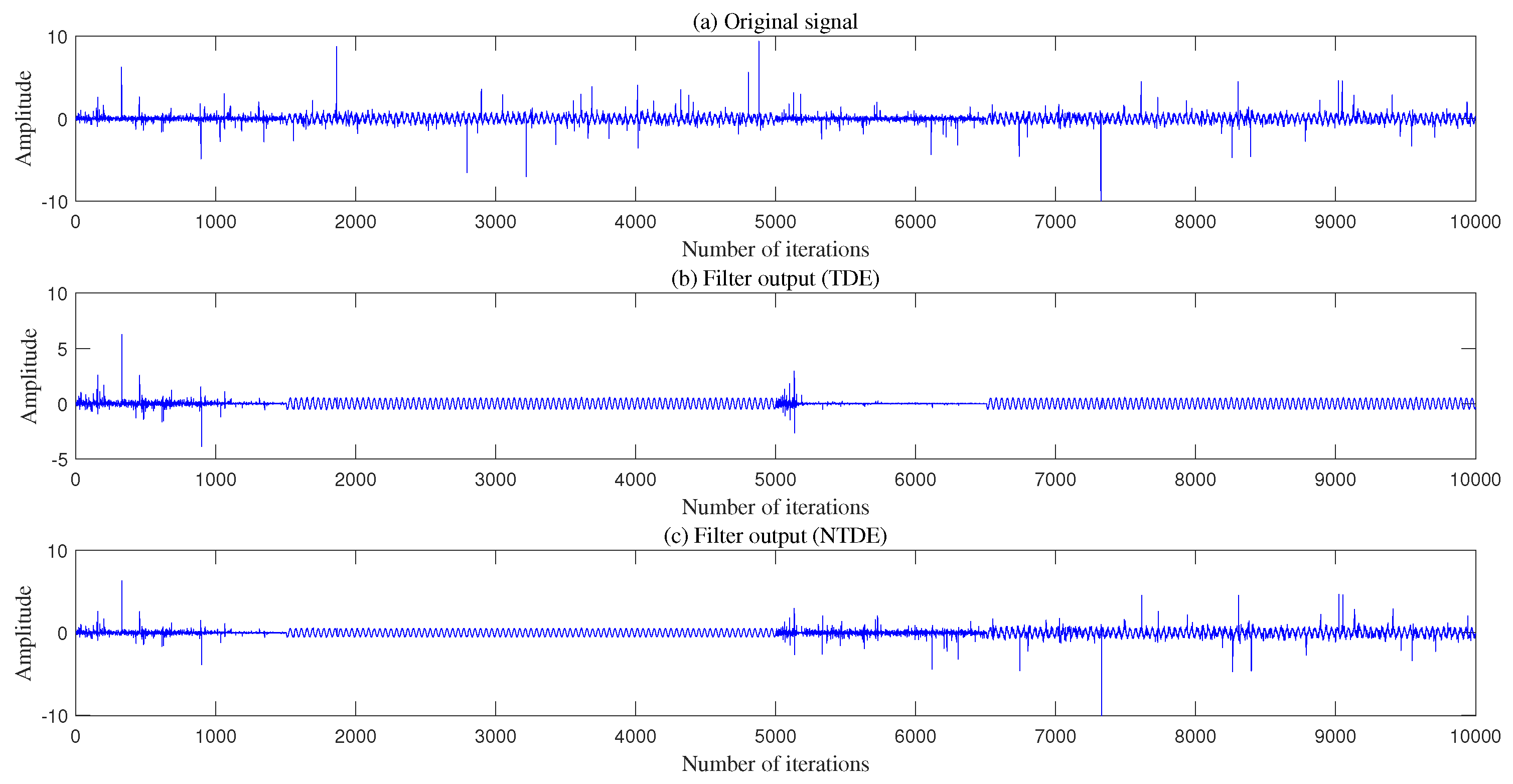
- When the reference noise is determined, the time delay between primary input and inference noise is compensated according to the time delay estimation results. After compensation, the value of delay is equal to about half time delay of the adaptive filter and the adaptive filter can obtain best noise cancellation performance.
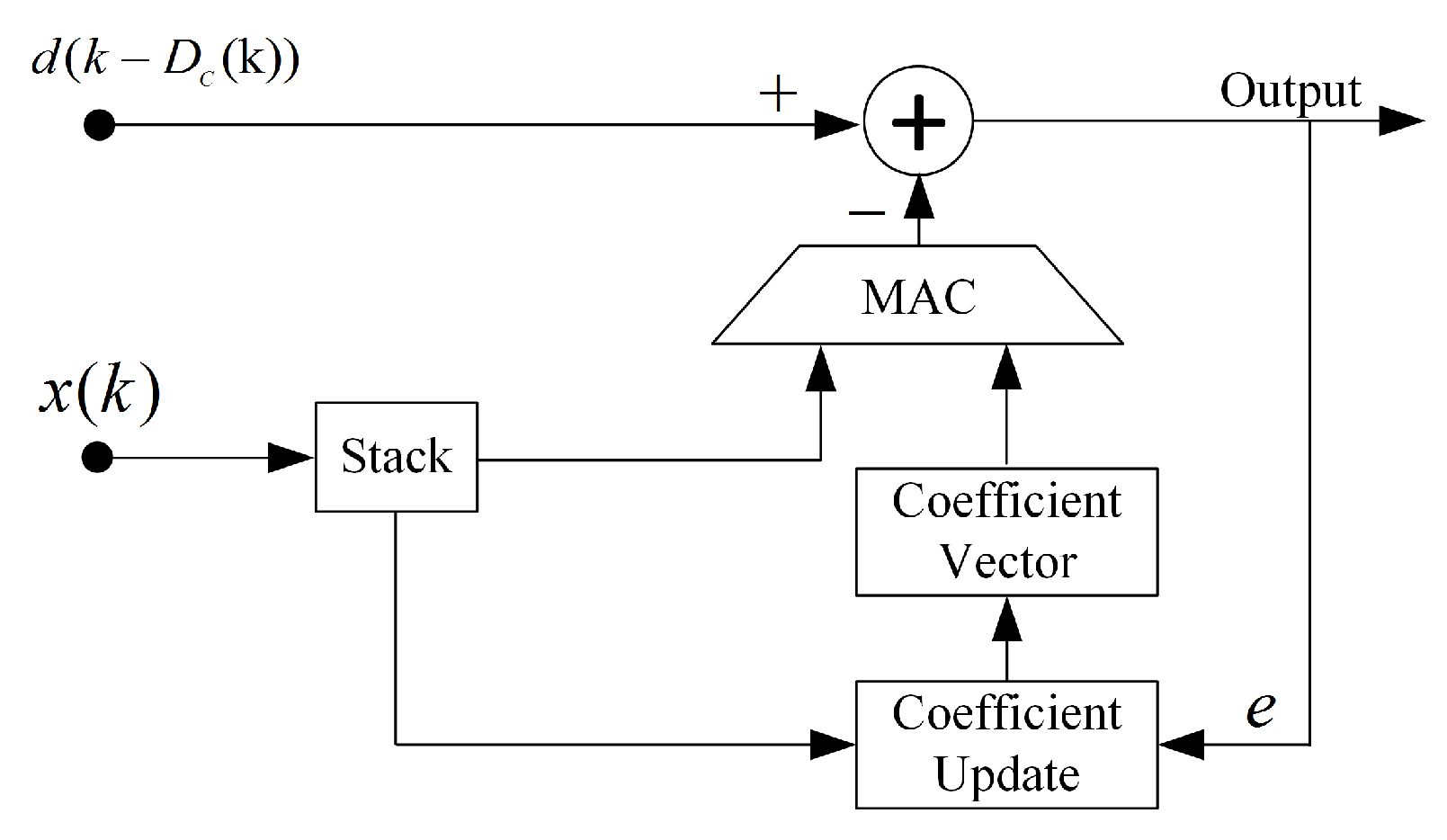
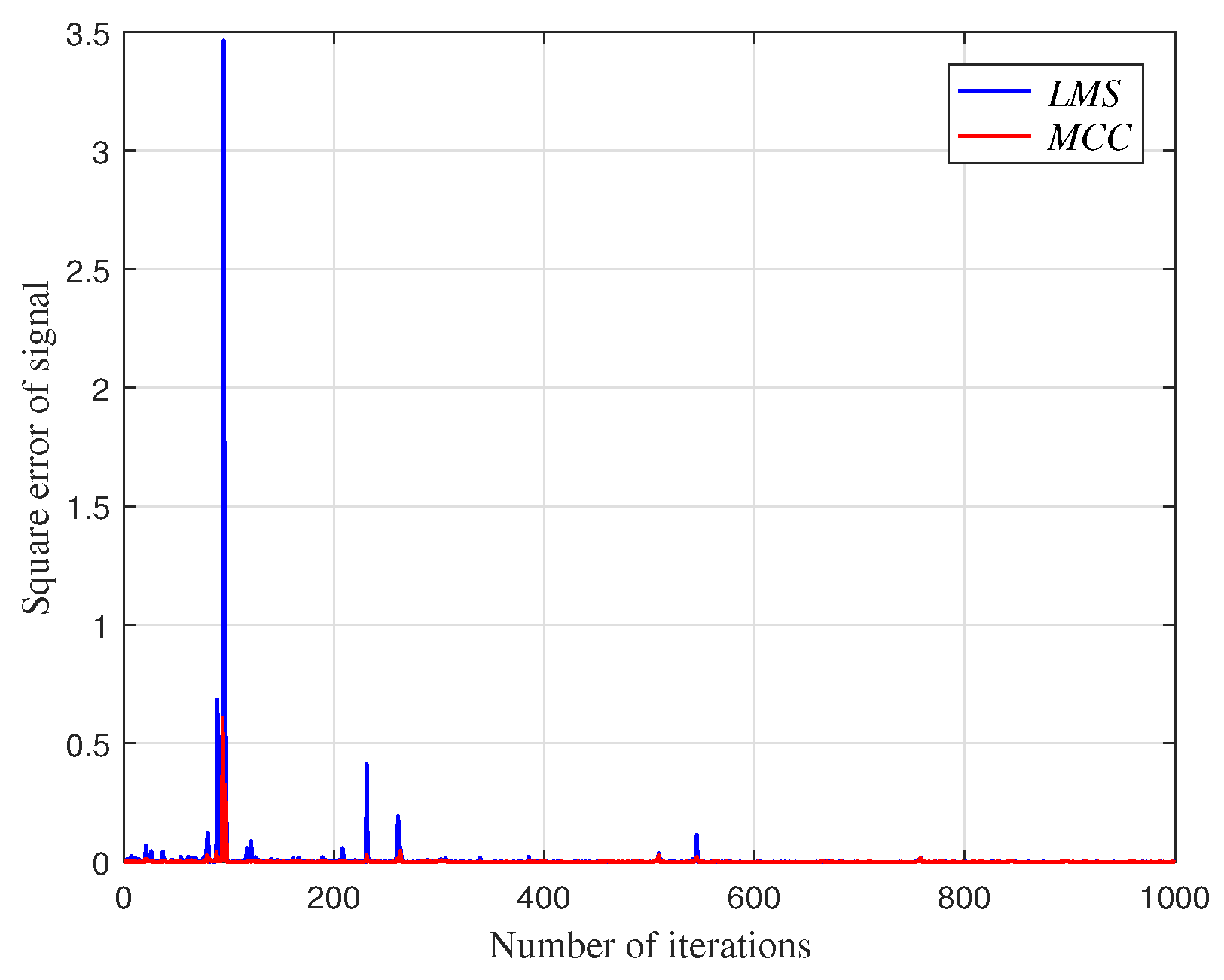
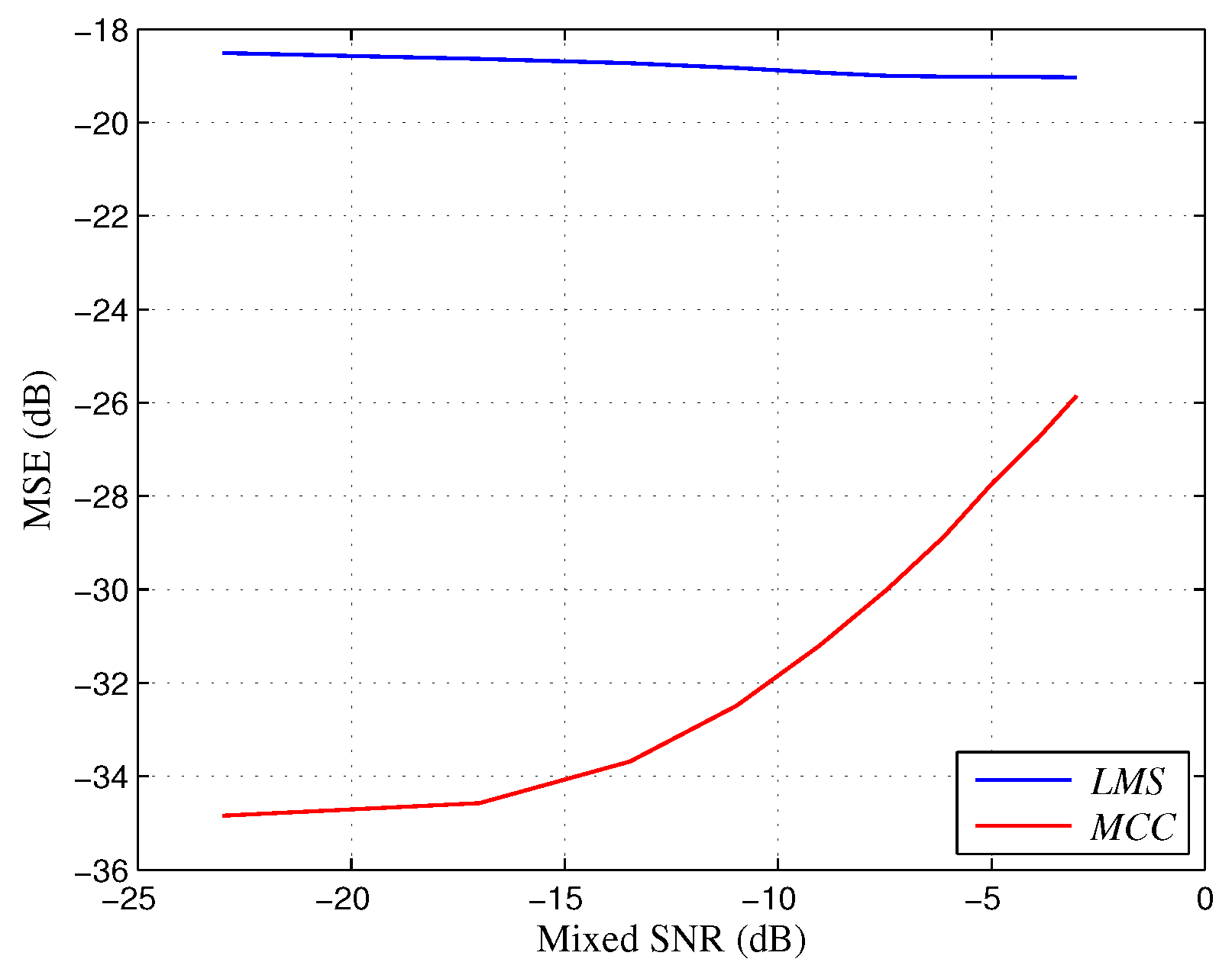
- The adaptive filter is designed based on MCC, which can improve the noise cancellation performance in the impulsive noise environment.
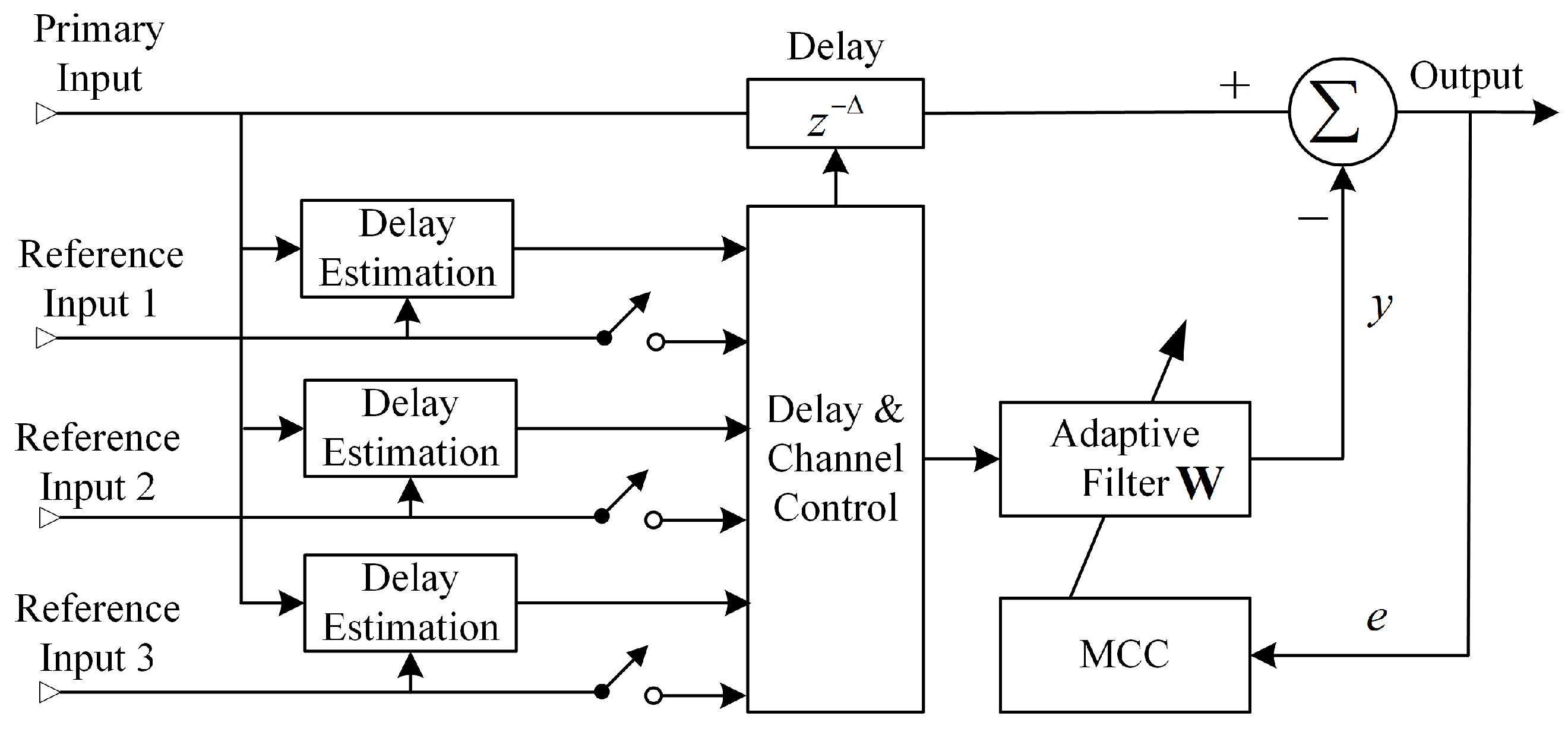
- In order to filter out the correlated noise in real time, the proposed algorithm is implemented on FPGA, which includes three modules: time delay estimation module, delay and channel control module, and noise cancellation module.
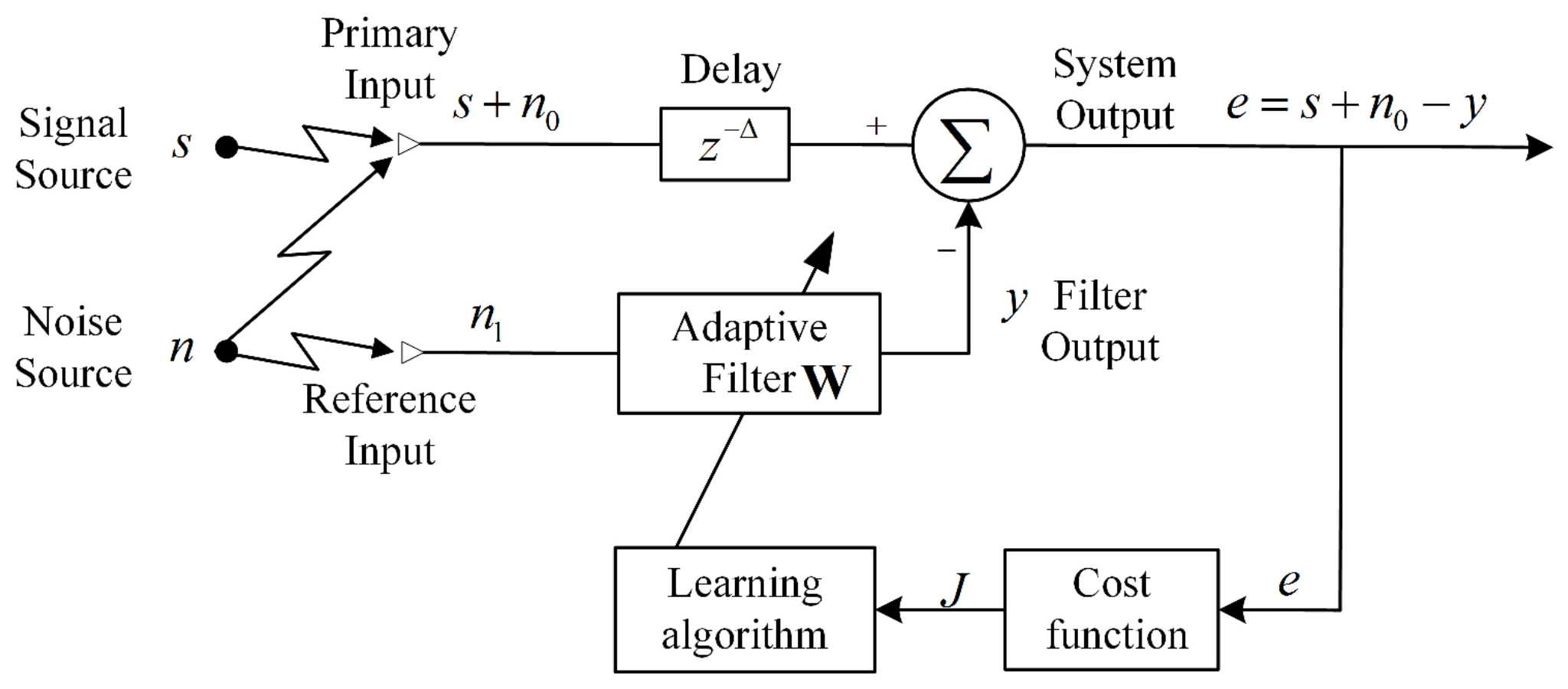
2. Adaptive Noise Cancellation Based on Time Delay Estimation
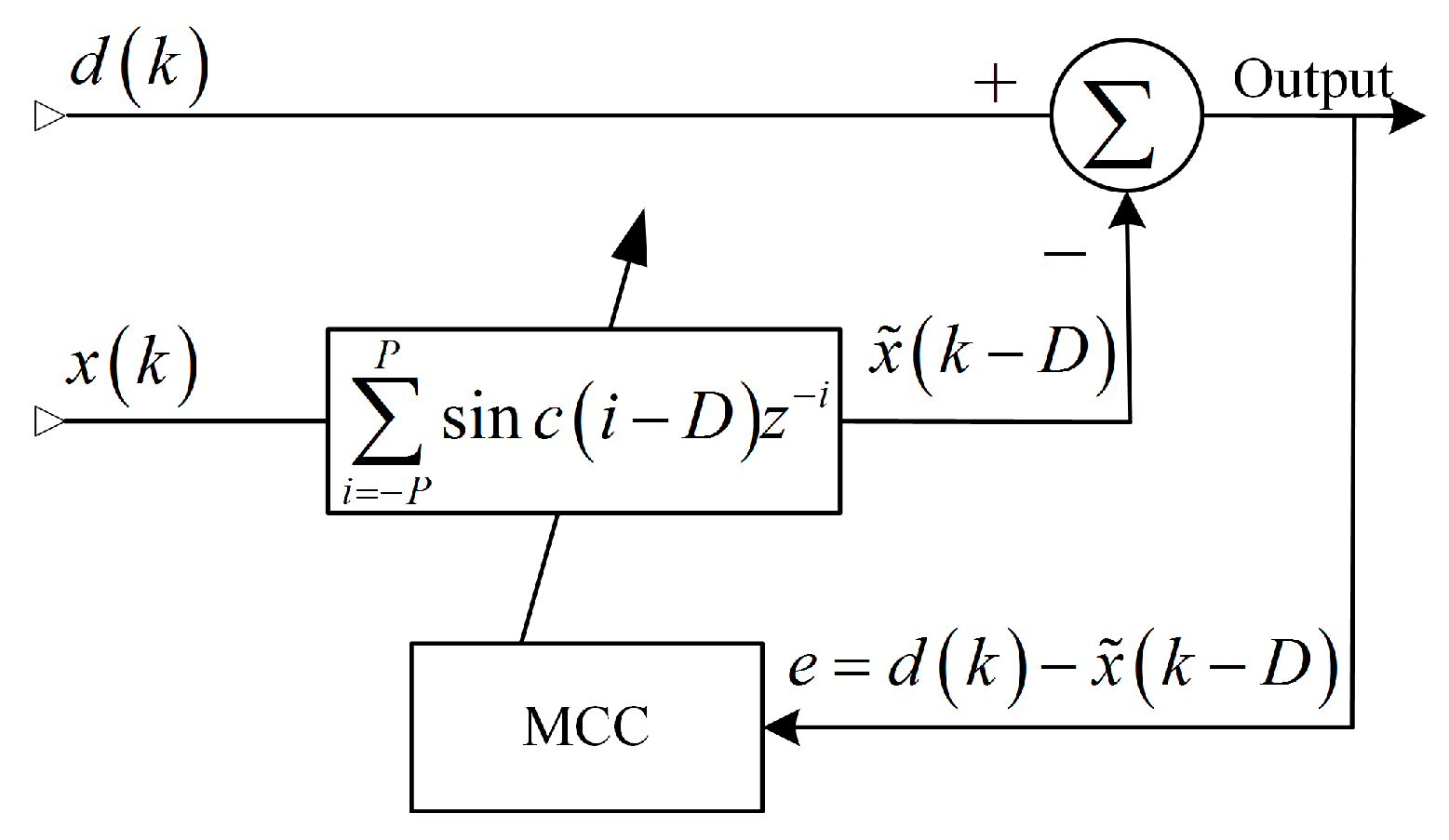
2.1. Maximum Correntropy Criterion
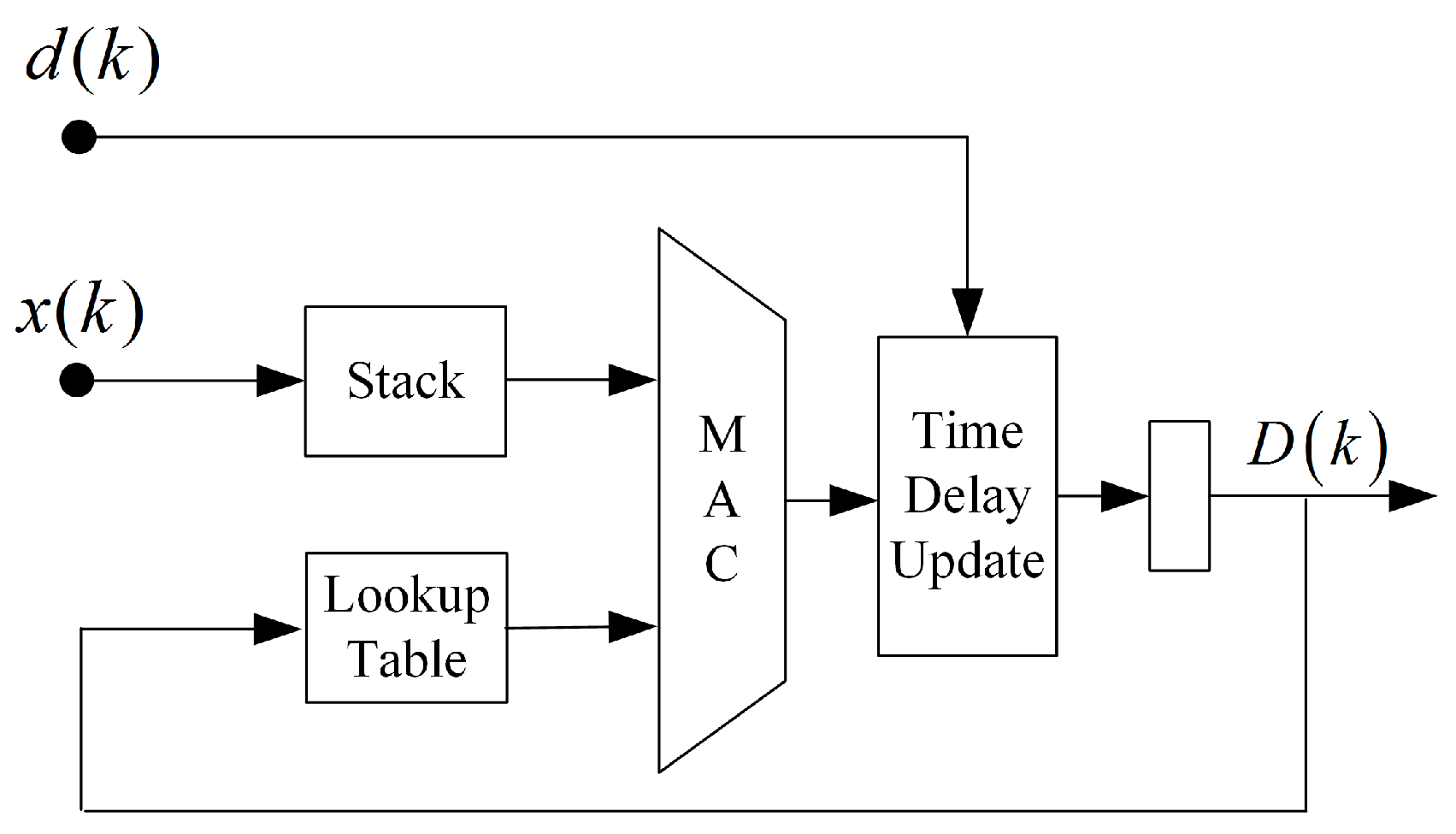
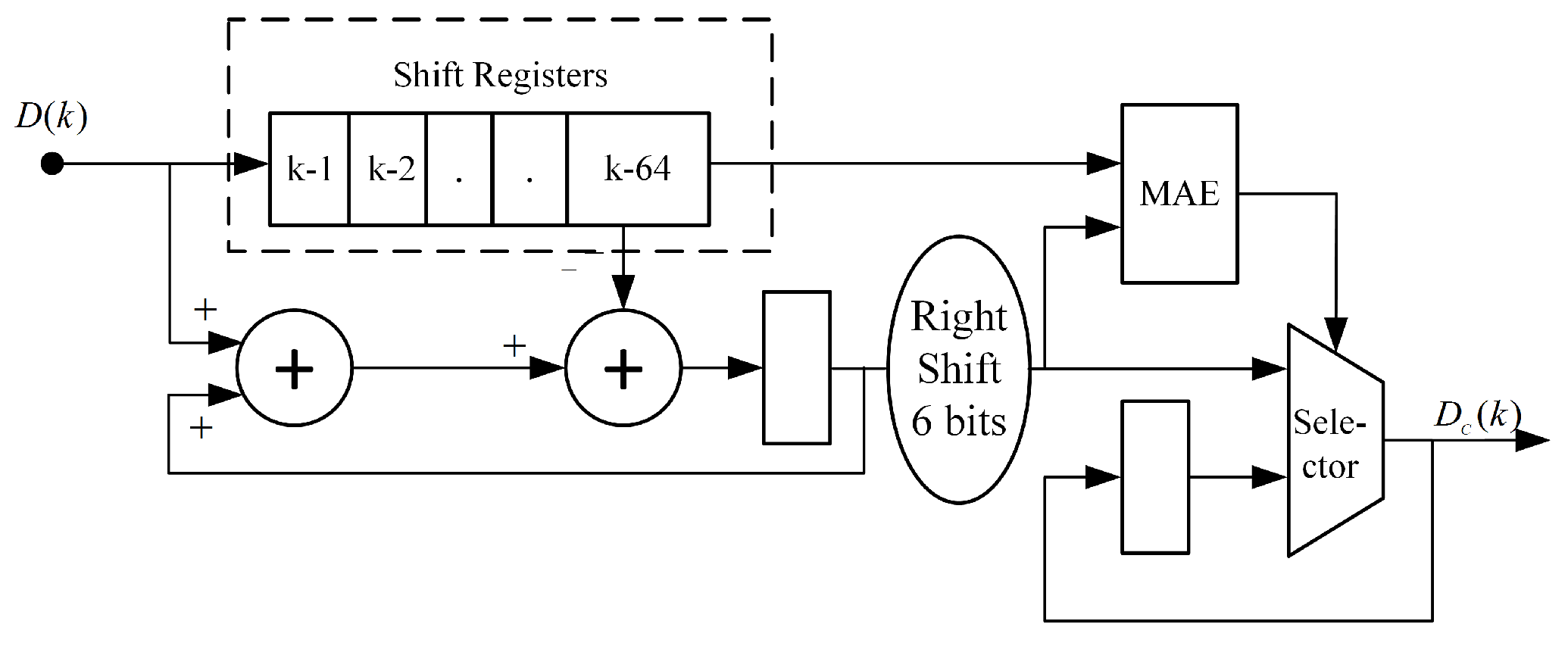
2.2. Explicit Time Delay Estimation
2.3. Time Delay Compensation
3. FPGA Implementation
4. Results and Discussion
4.1. Evaluation Methods
4.1.1. Simulation Method
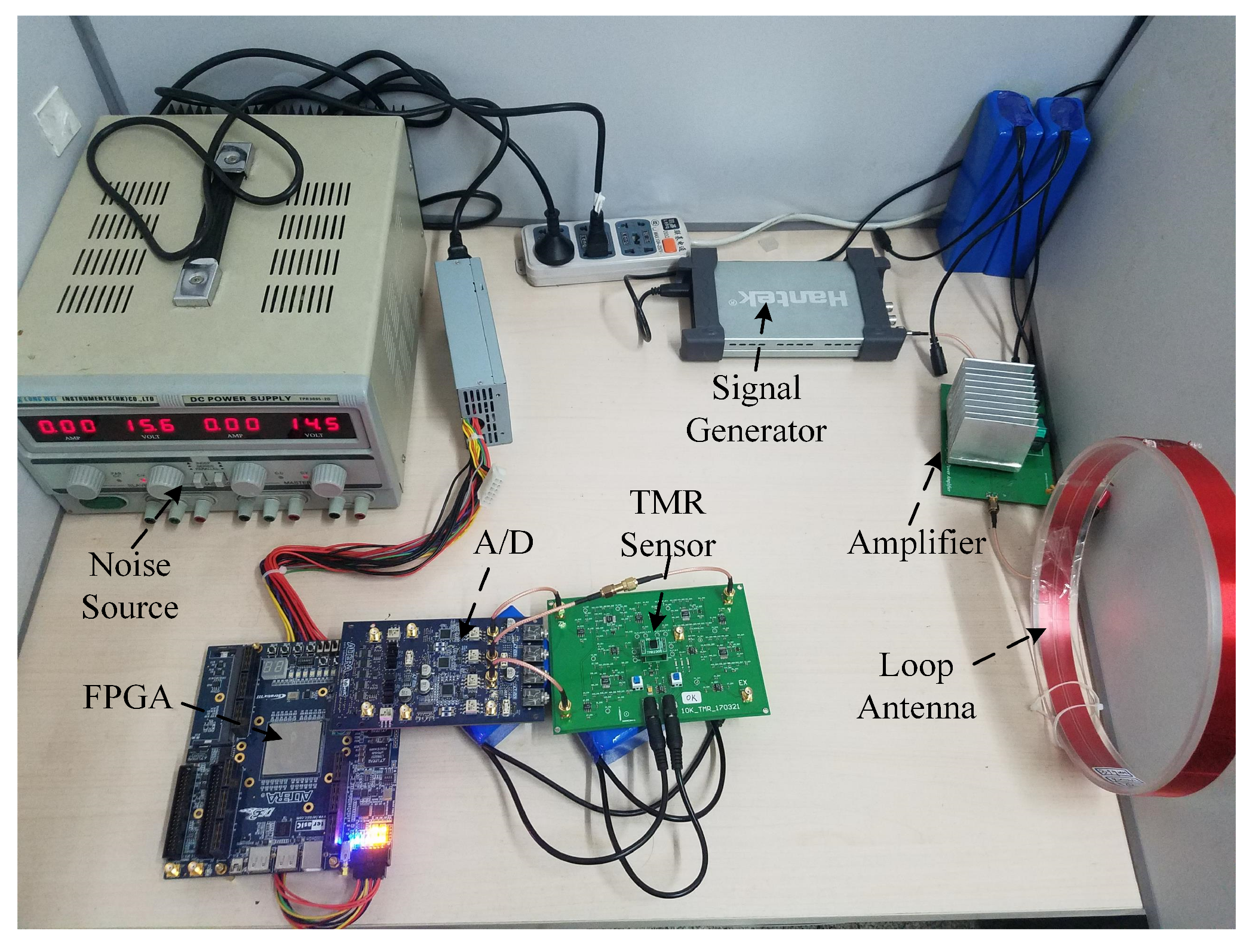
4.1.2. Experimental Method
4.2. Simulation Results
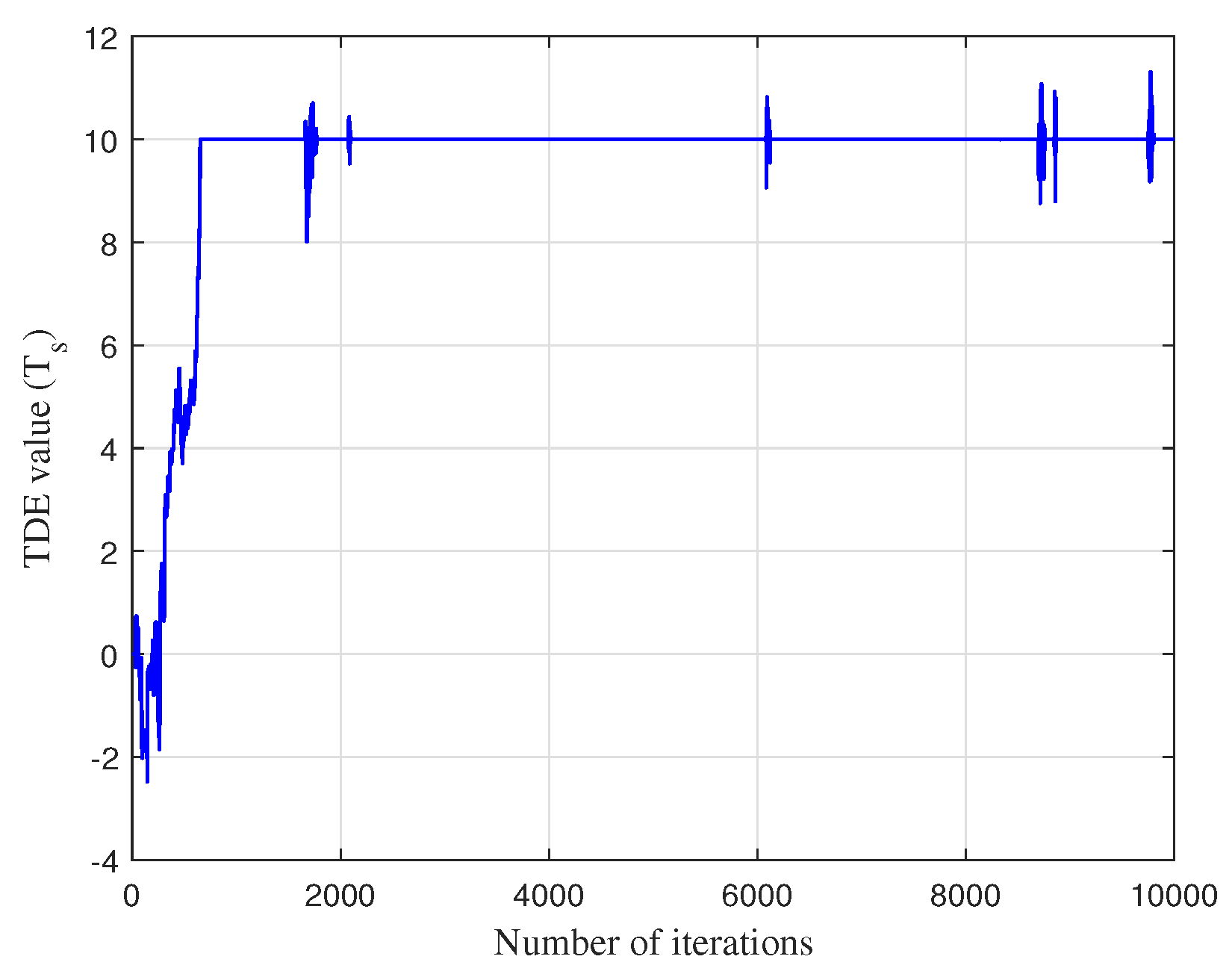
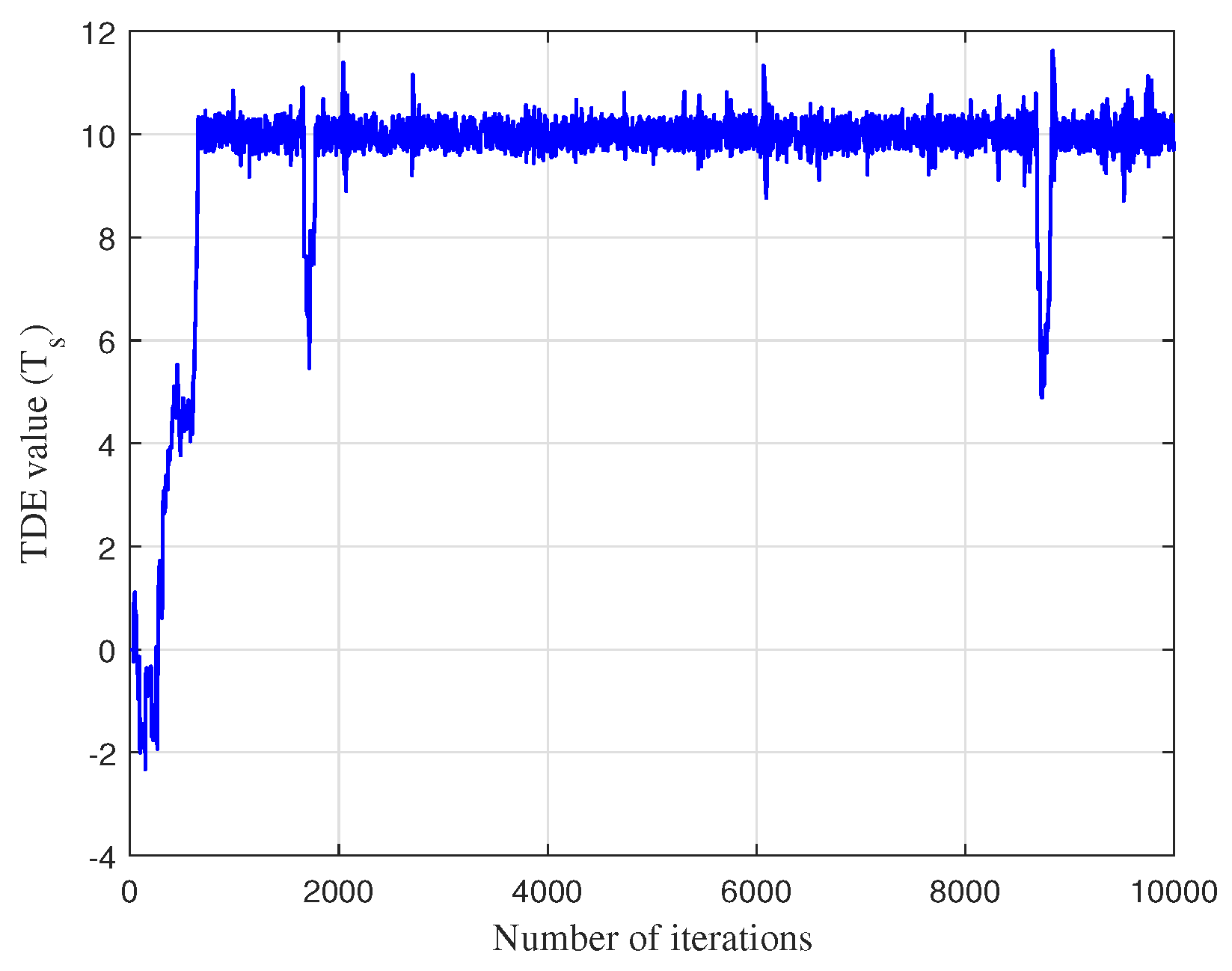
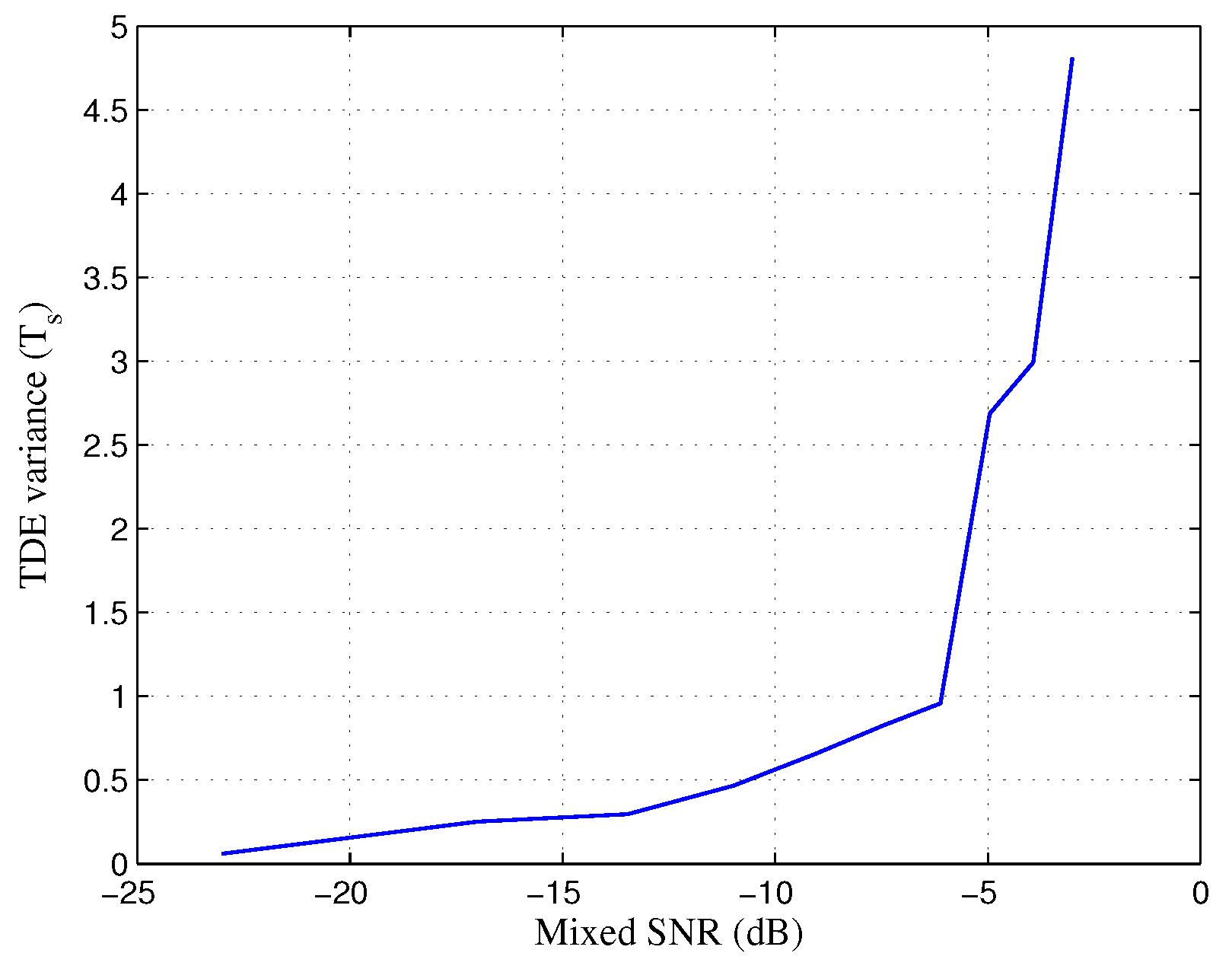
4.2.1. Time Delay Estimation Performance
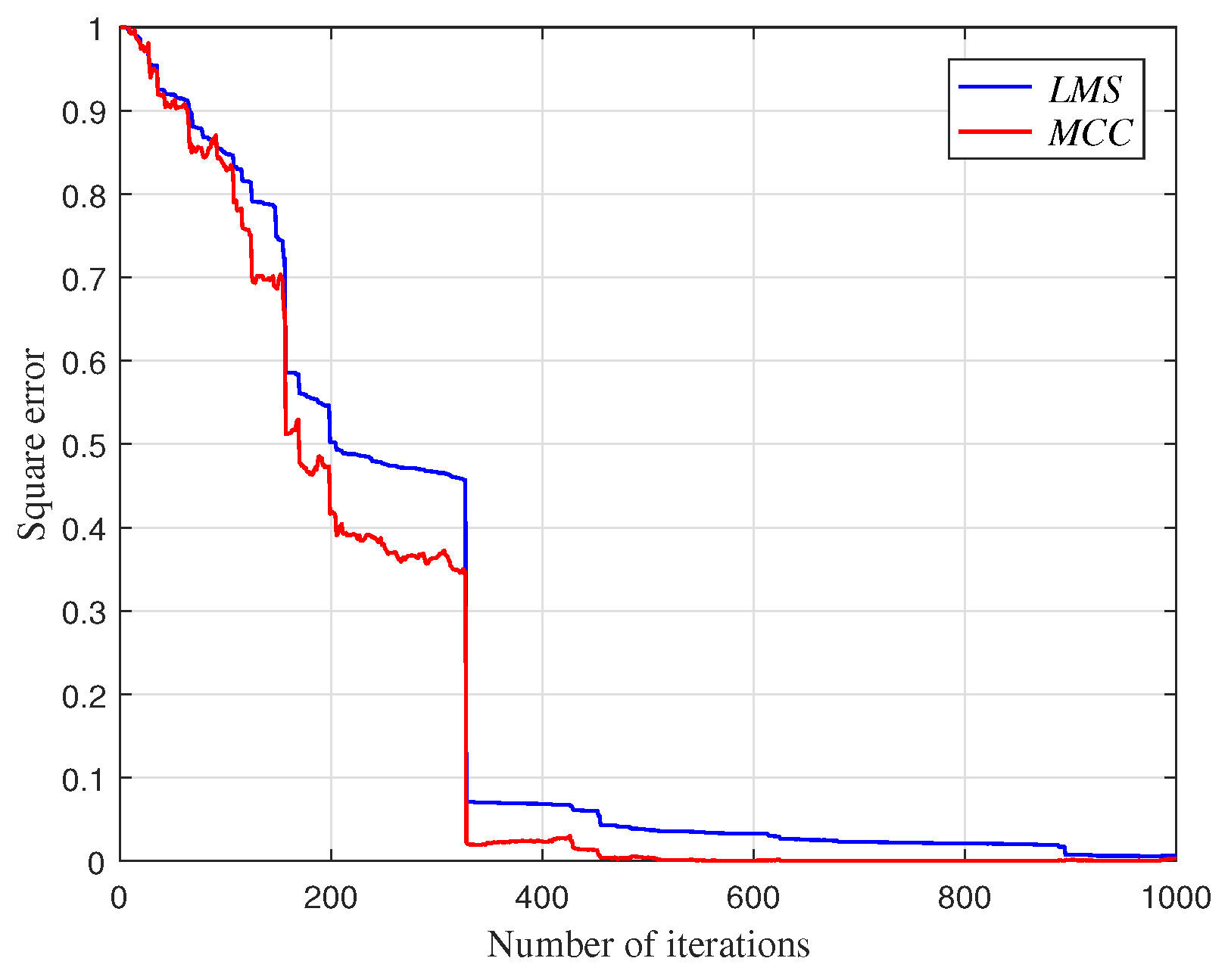
4.2.2. Noise Cancellation Performance
4.2.3. Time Delay Compensation Result
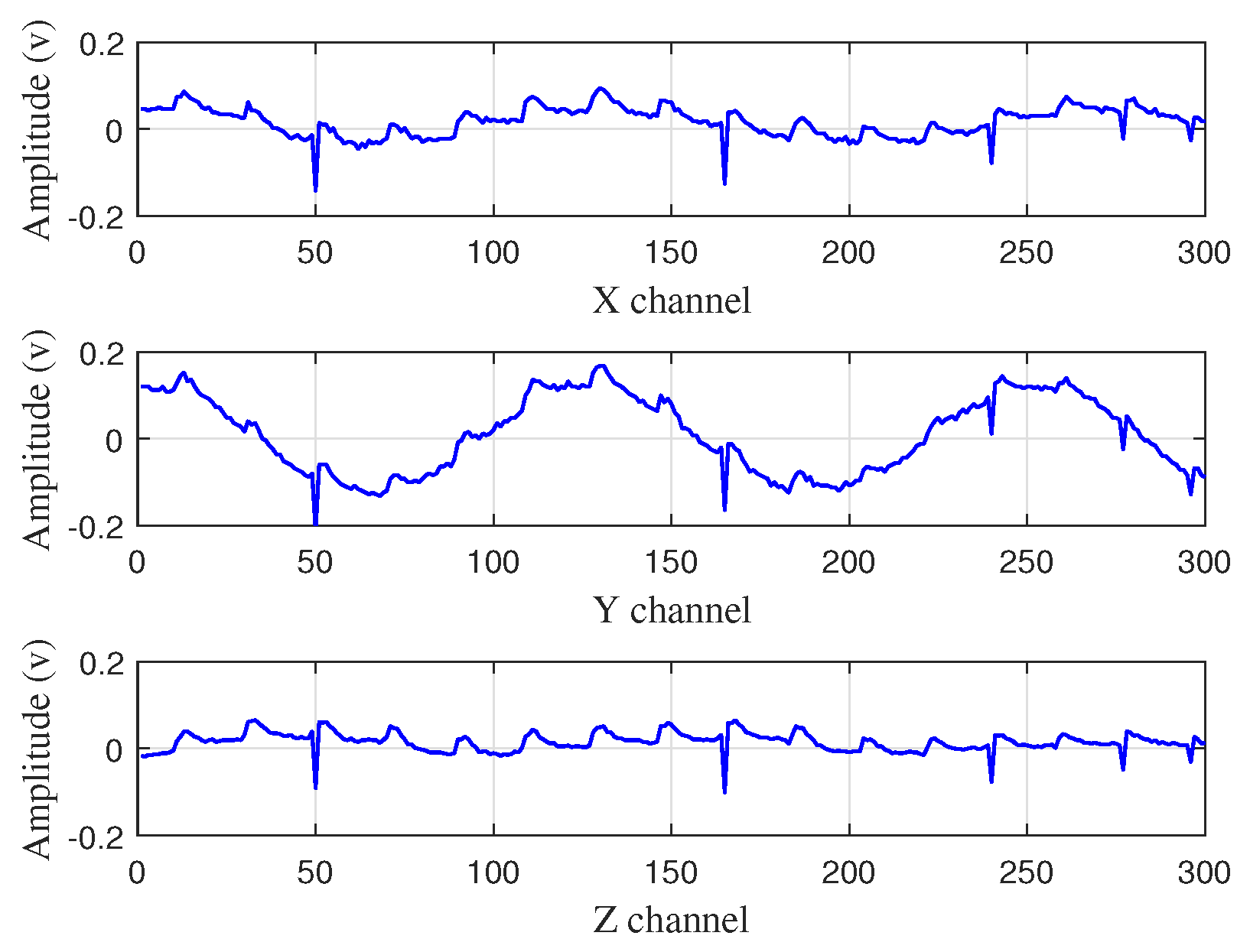
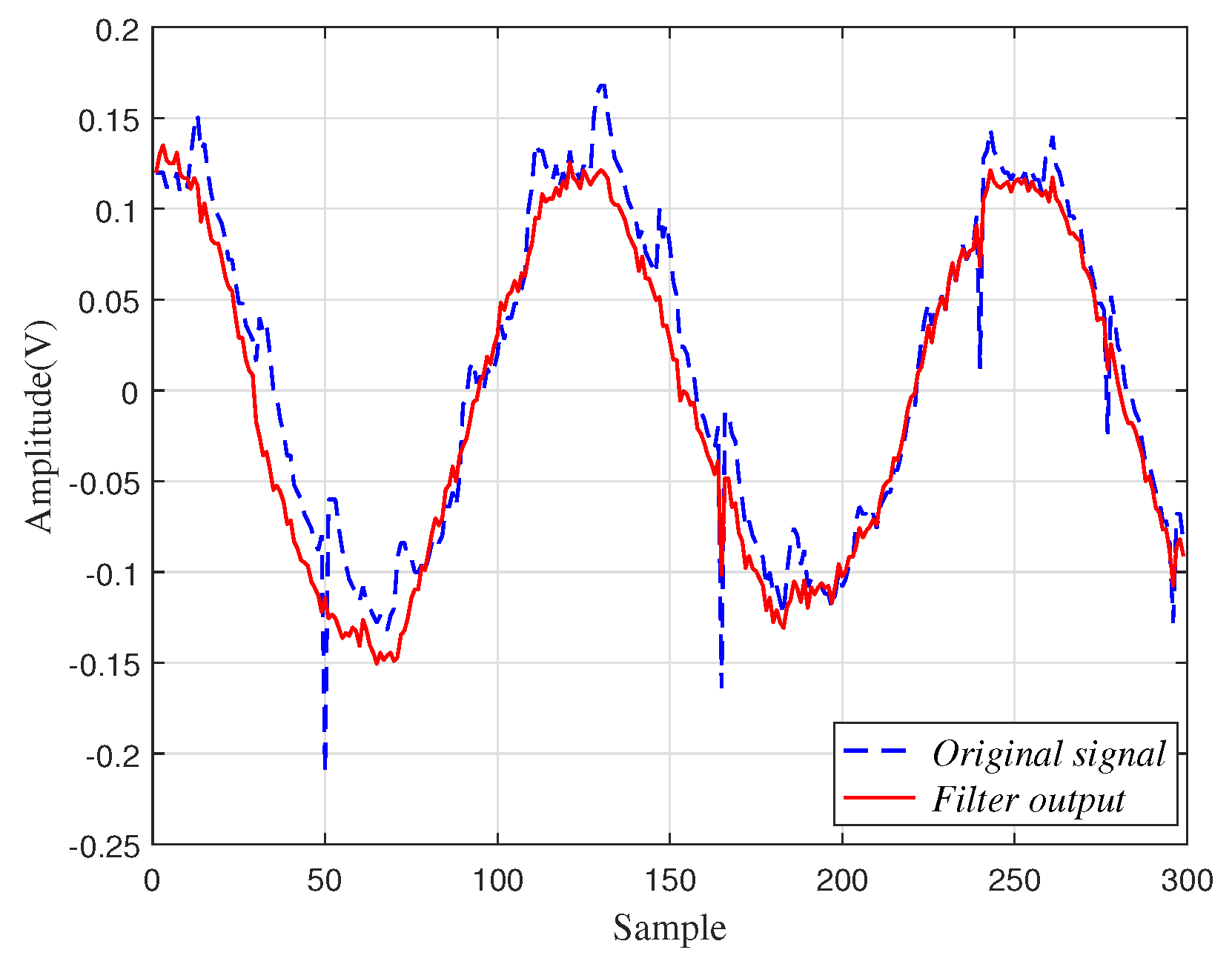
4.3. Experimental Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ma, J.; Zhang, X.; Huang, Q. Near-field magnetic induction communication device for underground wireless communication networks. Sci. China Inf. Sci. 2014, 57, 1–11. [Google Scholar] [CrossRef][Green Version]
- Ma, J.; Zhang, X.; Huang, Q.; Cheng, L.; Lu, M. Experimental Study on the Impact of Soil Conductivity on Underground Magneto-Inductive Channel. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1782–1785. [Google Scholar] [CrossRef]
- Goswami, J.C.; Hoefel, A.E.; Schwetlick, H. On subsurface wireless data acquisition system. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2332–2339. [Google Scholar] [CrossRef]
- Sheinker, A.; Ginzburg, B.; Salomonski, N.; Frumkis, L.; Kaplan, B.Z. Localization in 3-D using beacons of low frequency magnetic field. IEEE Trans. Instrum. Meas. 2013, 62, 3194–3201. [Google Scholar] [CrossRef]
- Devaney, A.J. Time reversal imaging of obscured targets from multistatic data. IEEE Trans. Antennas Propag. 2005, 53, 1600–1610. [Google Scholar] [CrossRef]
- Dalgaard, E.; Auken, E.; Larsen, J.J. Adaptive noise cancelling of multichannel magnetic resonance sounding signals. Geophys. J. Int. 2012, 191, 88–100. [Google Scholar] [CrossRef]
- Forooshani, A.E.; Bashir, S.; Michelson, D.G.; Noghanian, S. A survey of wireless communications and propagation modeling in underground mines. IEEE Commun. Surv. Tutor. 2013, 15, 1524–1545. [Google Scholar] [CrossRef]
- Compston, A.J.; Fluhler, J.D.; Schantz, H.G. A fundamental limit on antenna gain for electrically small antennas. In Proceedings of the IEEE Sarnoff Symposium, Princeton, NJ, USA, 28–30 April 2008; pp. 1–5. [Google Scholar]
- Schlegel, C.; Mallay, M.; Touesnard, C. Atmospheric Magnetic Noise Measurements in Urban Areas. IEEE Magn. Lett. 2014, 5, 1–4. [Google Scholar] [CrossRef]
- Yan, L.; Waynert, J.; Sunderman, C.; Damiano, N. Statistical analysis and modeling of VLF/ELF noise in coal mines for through-the-earth wireless communications. In Proceedings of the 2014 IEEE Industry Applications Society Annual Meeting, Vancouver, BC, Canada, 5–9 October 2014; pp. 1–5. [Google Scholar]
- Middleton, D. Non-Gaussian noise models in signal processing for telecommunications: New methods an results for class A and class B noise models. IEEE Trans. Inf. Theory 1999, 45, 1129–1149. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Romano, G.; Solimene, R. Performance analysis of time-reversal MUSIC. IEEE Trans. Signal Process. 2015, 63, 2650–2662. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Salvoi-Rossi, P. Noncolocated time-reversal MUSIC: High-SNR distribution of null spectrum. IEEE Signal Process. Lett. 2017, 24, 397–401. [Google Scholar] [CrossRef]
- Raab, F.H.; Joughin, I.R. Signal processing for through-the-earth radio communication. IEEE Trans. Commun. 1995, 43, 2995–3003. [Google Scholar] [CrossRef]
- Quinquis, A.; Rossignol, S. Noise reduction, with a noise reference, of underwater magnetic signals. Digit. Signal Process. 1996, 6, 240–248. [Google Scholar] [CrossRef]
- Mitchell, D.; Robertson, J. Reference antenna techniques for canceling radio frequency interference due to moving sources. Radio Sci. 2005, 40, 1–9. [Google Scholar] [CrossRef]
- Haykin, S.S. Adaptive Filter Theory; Pearson Education India: Noida, India, 2008. [Google Scholar]
- Walach, E.; Widrow, B. The least mean fourth (LMF) adaptive algorithm and its family. IEEE Trans. Inf. Theory 1984, 30, 275–283. [Google Scholar] [CrossRef]
- Pei, S.C.; Tseng, C.C. Least mean p-power error criterion for adaptive FIR filter. IEEE J. Sel. Areas Commun. 1994, 12, 1540–1547. [Google Scholar]
- Wang, R.; Chen, B.; Zheng, N.; Principe, J.C. A variable step-size adaptive algorithm under maximum correntropy criterion. In Proceedings of the 2015 International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–17 July 2015; pp. 1–5. [Google Scholar]
- Principe, J.C. Information Theoretic Learning: Renyi’s Entropy and Kernel Perspectives; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Singh, A.; Principe, J.C. Using correntropy as a cost function in linear adaptive filters. In Proceedings of the International Joint Conference on Neural Networks, Atlanta, GA, USA, 14–19 June 2009; pp. 2950–2955. [Google Scholar]
- Widrow, B.; Stearns, S.D. Adaptive Signal Processing; Prentice-Hall, Inc.: Englewood Cliffs, NJ, USA, 1985; 491p. [Google Scholar]
- Lu, Y.; Fowler, R.; Tian, W.; Thompson, L. Enhancing echo cancellation via estimation of delay. IEEE Trans. Signal Process. 2005, 53, 4159–4168. [Google Scholar]
- Sugiyama, A.; Miyahara, R.; Kato, M. An adaptive noise canceller with adaptive delay compensation for a distant noise source. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 265–268. [Google Scholar]
- Wang, P.; Zhang, X.; Sun, G.; Xu, L.; Xu, J. Adaptive time delay estimation algorithm for indoor near-field electromagnetic ranging. Int. J. Commun. Syst. 2016. [Google Scholar] [CrossRef]
- Padilla, P.; Górriz, J.M.; Ramírez, J.; Salas-Gonzalez, D.; Illán, I. Intensity normalization in the analysis of functional DaTSCAN SPECT images: The α-stable distribution-based normalization method vs other approaches. Neurocomputing 2015, 150, 4–15. [Google Scholar] [CrossRef]
- Laguna-Sanchez, G.; Lopez-Guerrero, M. On the use of alpha-stable distributions in noise modeling for PLC. IEEE Trans. Power Deliv. 2015, 30, 1863–1870. [Google Scholar] [CrossRef]
- Fiche, A.; Cexus, J.C.; Martin, A.; Khenchaf, A. Features modeling with an α-stable distribution: Application to pattern recognition based on continuous belief functions. Inf. Fusion 2013, 14, 504–520. [Google Scholar] [CrossRef]
- Yue, B.; Peng, Z. A validation study of α-stable distribution characteristic for seismic data. Signal Process. 2015, 106, 1–9. [Google Scholar] [CrossRef]
- Dooley, S.R.; Nandi, A.K. Adaptive subsample time delay estimation using Lagrange interpolators. IEEE Signal Process. Lett. 1999, 6, 65–67. [Google Scholar] [CrossRef]
- Sriram, V.; Tsoi, K.; Luk, W.; Cox, D. Design-space exploration of biologically-inspired visual object recognition algorithms using CPUs, GPUs, and FPGAs. Many-Core Reconfig. Supercomput. 2010. Available online: https://pdfs.semanticscholar.org/2610/9131cdb40d6928b806afef6a1b3b44088ca1.pdf (accessed on 20 April 2016).
- Ma, X.; Nikias, C.L. Joint estimation of time delay and frequency delay in impulsive noise using fractional lower order statistics. IEEE Trans. Signal Process. 1996, 44, 2669–2687. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | ALUTs | Block Memory (Kbits) | DSP Block |
|---|---|---|---|
| MCC-ETDE | 16,478 | 2048 | 309 |
| Control Module | 867 | 0 | 0 |
| ANC | 1620 | 0 | 32 |
| Total Utilization | 18,969 | 2048 | 341 |
| Utilization Rate | 9% | 14% | 44% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.; Zhang, X.; Xu, L.; Liu, Z.; Wan, Y. Adaptive Noise Cancellation Based on Time Delay Estimation for Low Frequency Communication. Appl. Sci. 2018, 8, 734. https://doi.org/10.3390/app8050734
Wang P, Zhang X, Xu L, Liu Z, Wan Y. Adaptive Noise Cancellation Based on Time Delay Estimation for Low Frequency Communication. Applied Sciences. 2018; 8(5):734. https://doi.org/10.3390/app8050734
Chicago/Turabian StyleWang, Peng, Xiaotong Zhang, Liyuan Xu, Zhiyang Liu, and Yadong Wan. 2018. "Adaptive Noise Cancellation Based on Time Delay Estimation for Low Frequency Communication" Applied Sciences 8, no. 5: 734. https://doi.org/10.3390/app8050734
APA StyleWang, P., Zhang, X., Xu, L., Liu, Z., & Wan, Y. (2018). Adaptive Noise Cancellation Based on Time Delay Estimation for Low Frequency Communication. Applied Sciences, 8(5), 734. https://doi.org/10.3390/app8050734