A Novel Method for Modeling the Electromagnetic Characteristics of Switched Reluctance Motors



Abstract
:1. Introduction
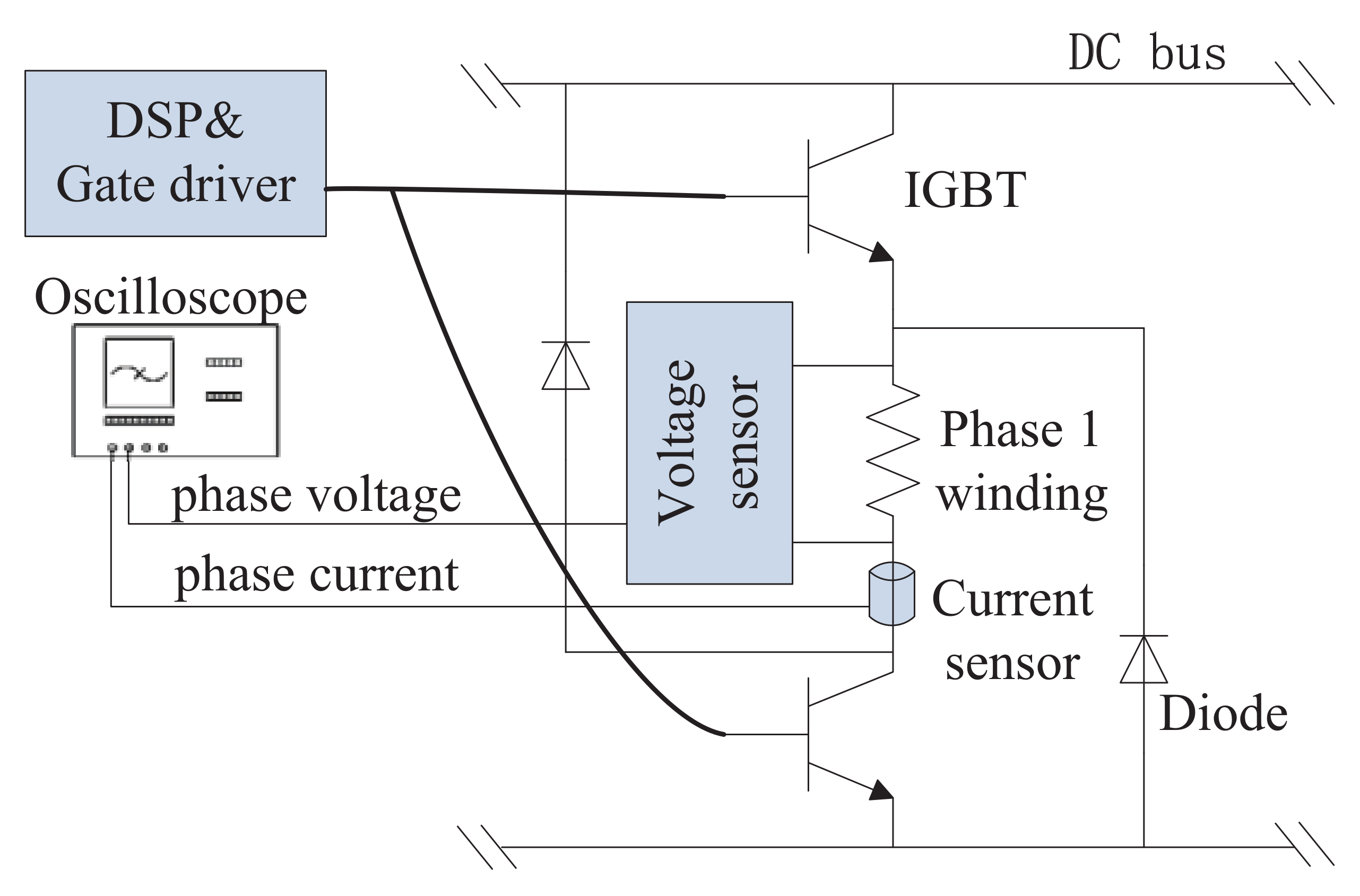
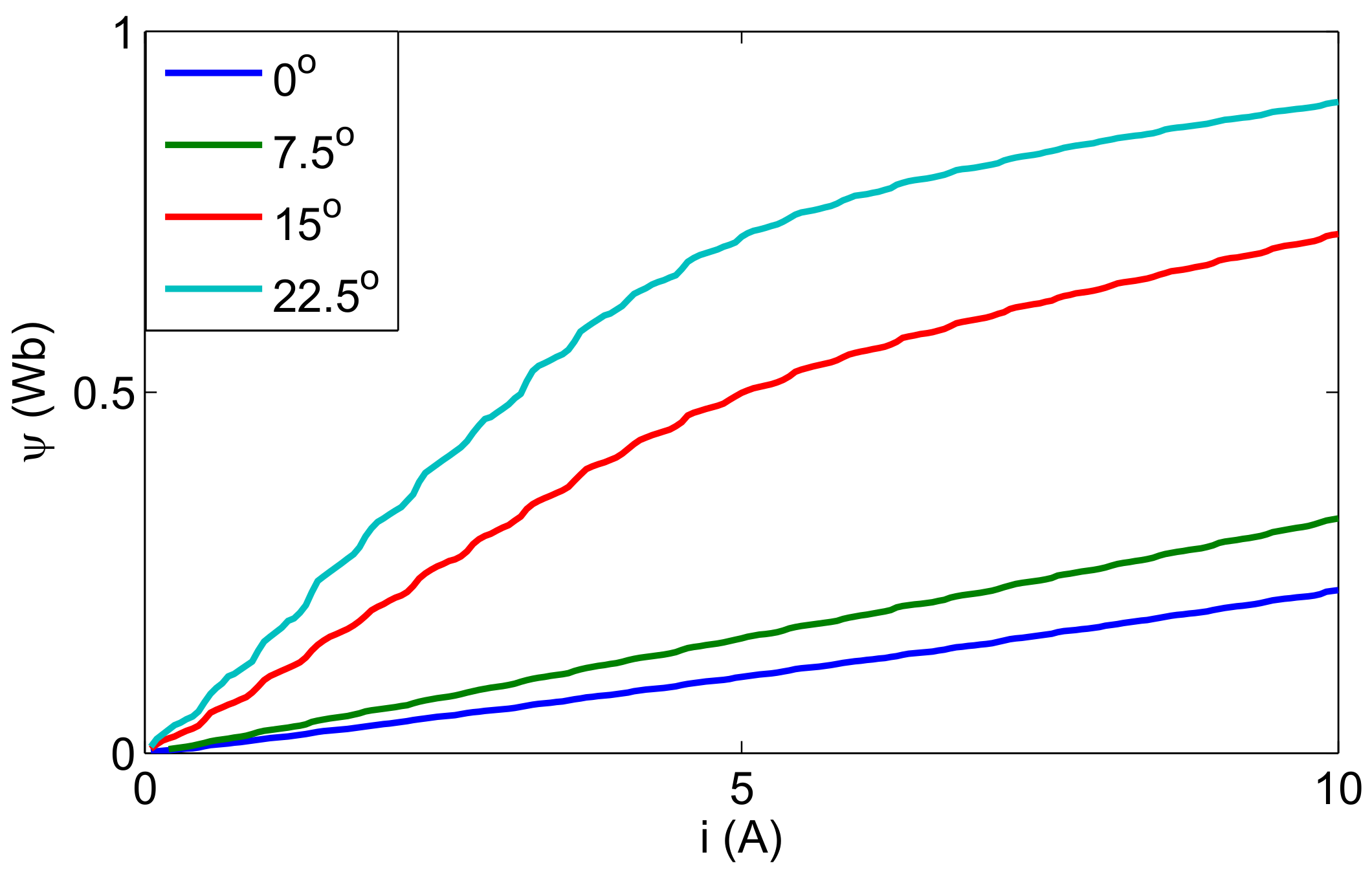
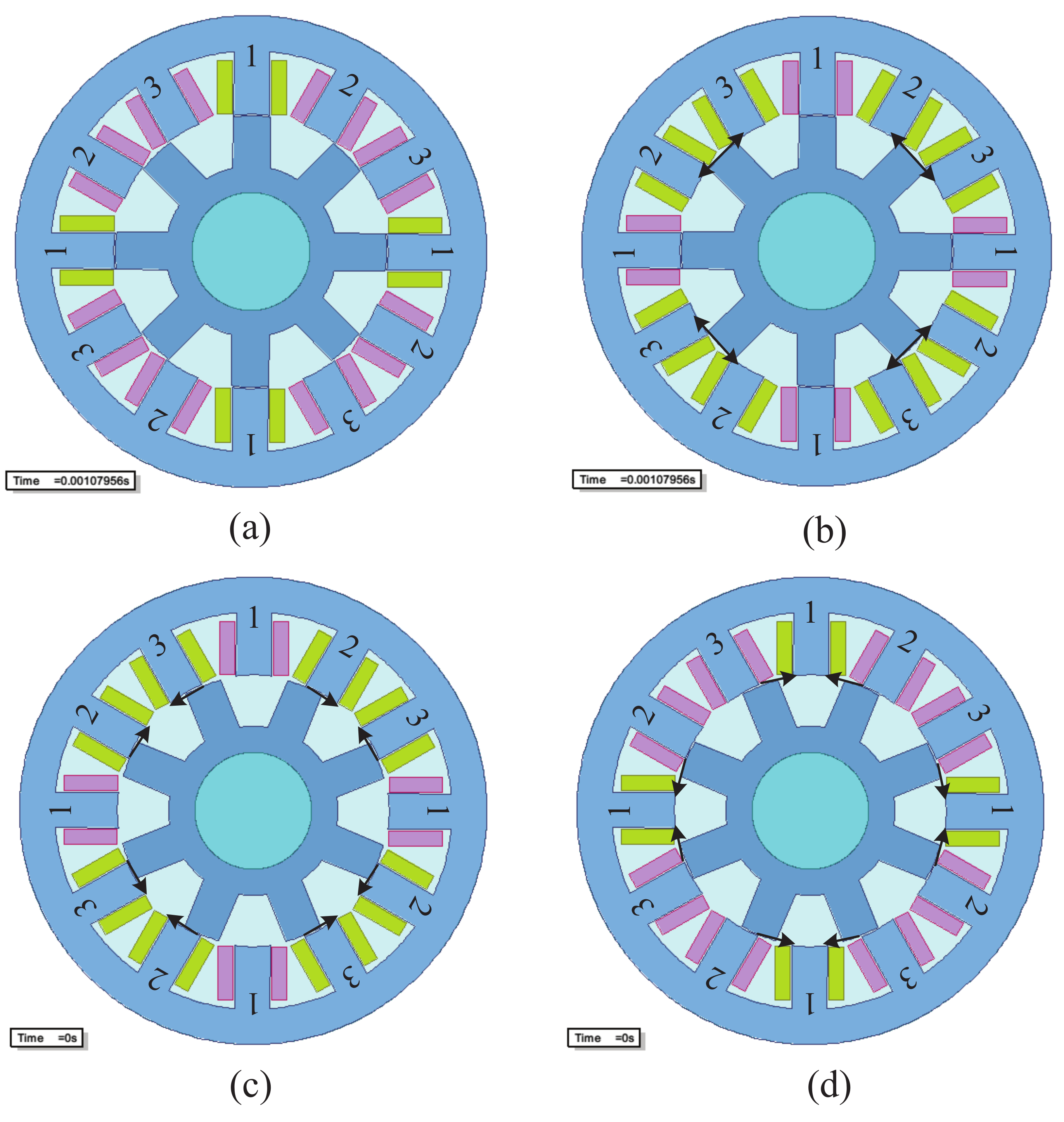
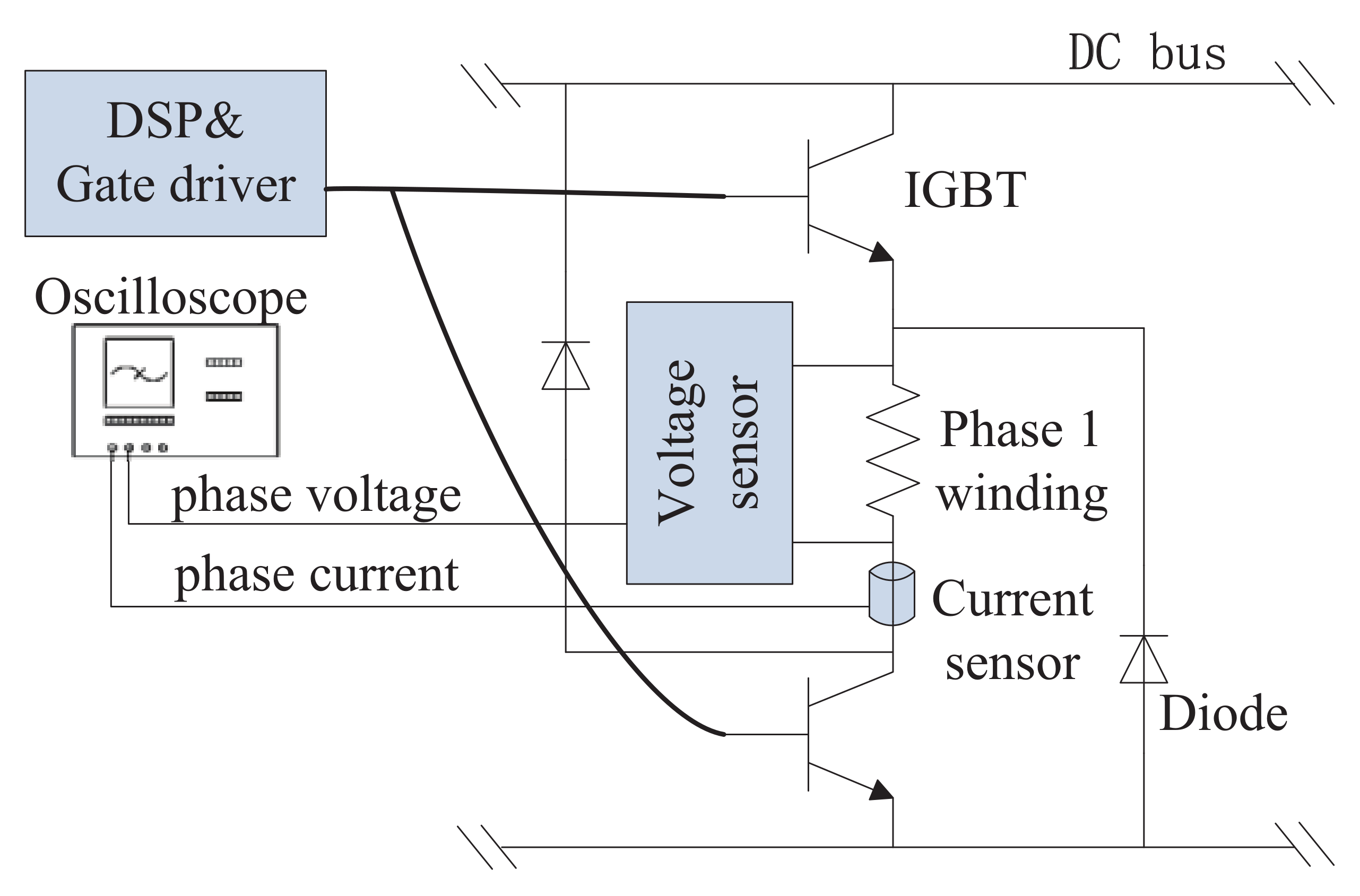
2. Measurement of Flux-Linkage Characteristics
- (1)
- Exciting Phase 1, the rotor will be attracted to the aligned position of the stator and rotor, and this position is defined as 22.5°.
- (2)
- The oscilloscope records the current waveforms of the voltage and current of Phase 1.
- (3)
- Exciting both Phases 2 and 3 at the aligned position of Phase 1, the rotor will continue to remain in standstill at 22.5°.
- (4)
- The oscilloscope records the current waveforms of the voltage and current of Phase 2.
- (5)
- Exciting Phase 2, the rotor will be attracted to the aligned position of Phase 2.
- (6)
- Exciting Phases 2 and 3 simultaneously by the same voltage, the rotor will be in standstill at 0°.
- (7)
- The oscilloscope records the current waveforms of the voltage and current of Phase 3.
- (8)
- Exciting Phase 1 by a pulsed voltage and exciting Phases 2 and 3 simultaneously by the same voltage to maintain the position.
- (9)
- The oscilloscope records the current waveforms of the voltage and current of Phase 1.
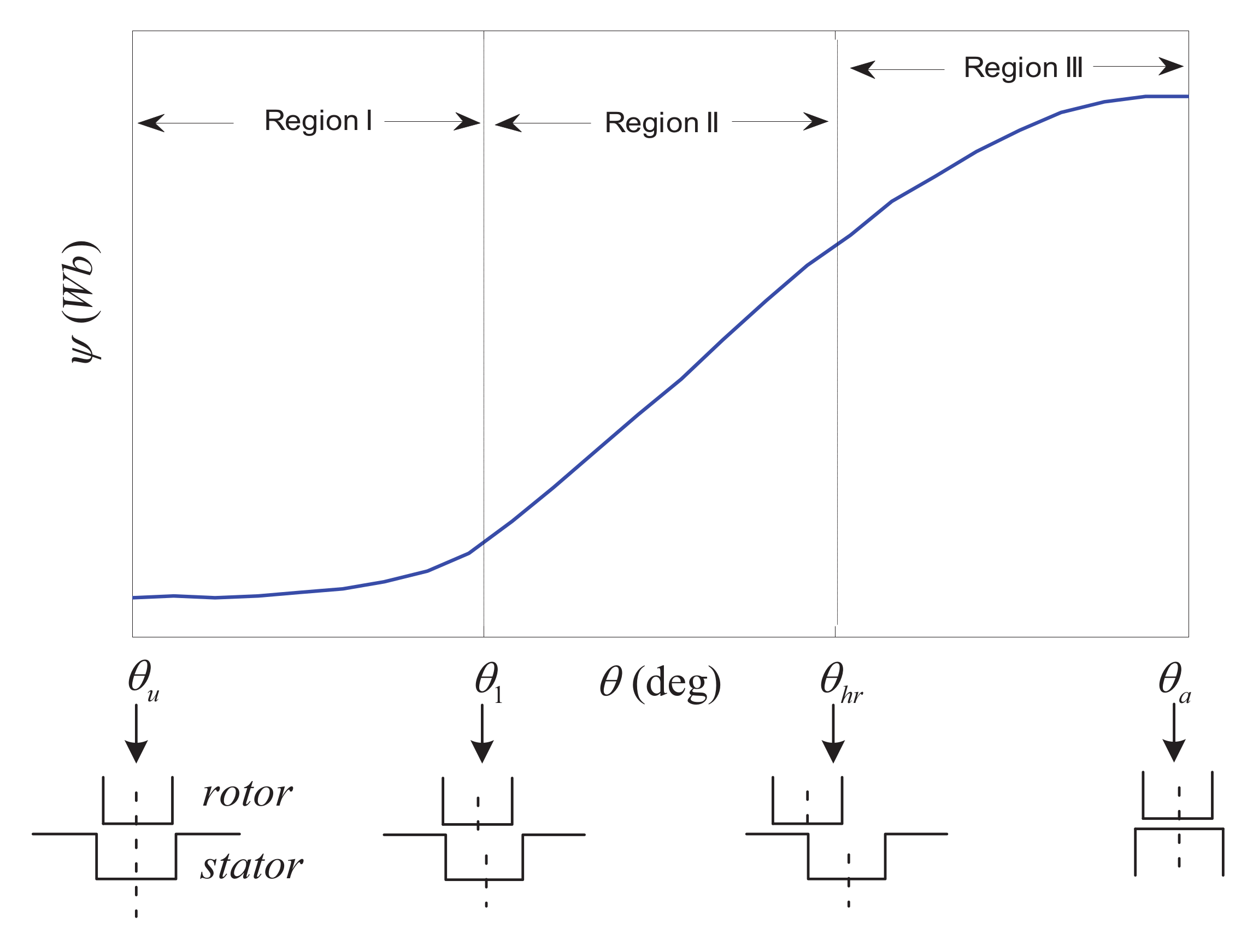
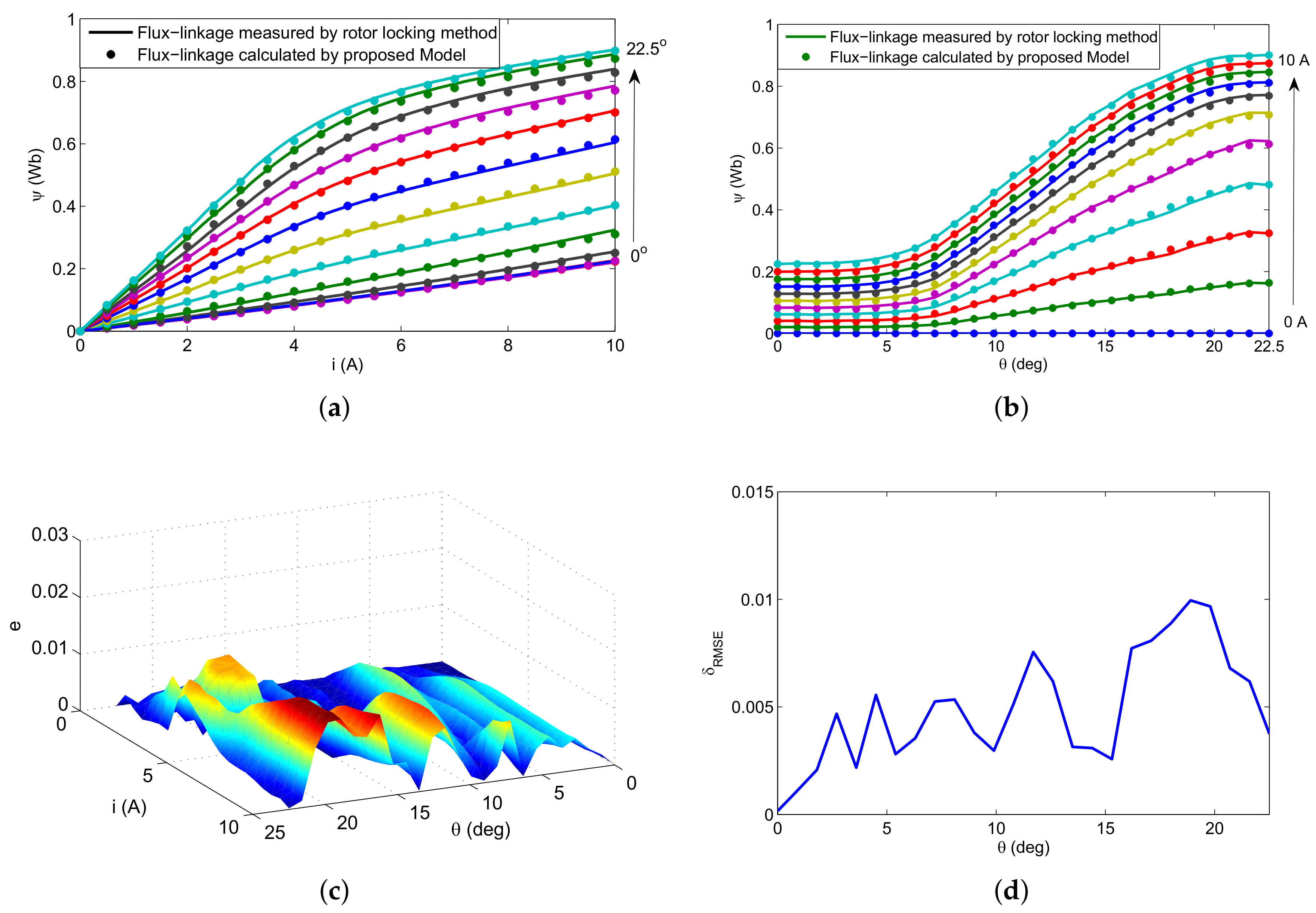
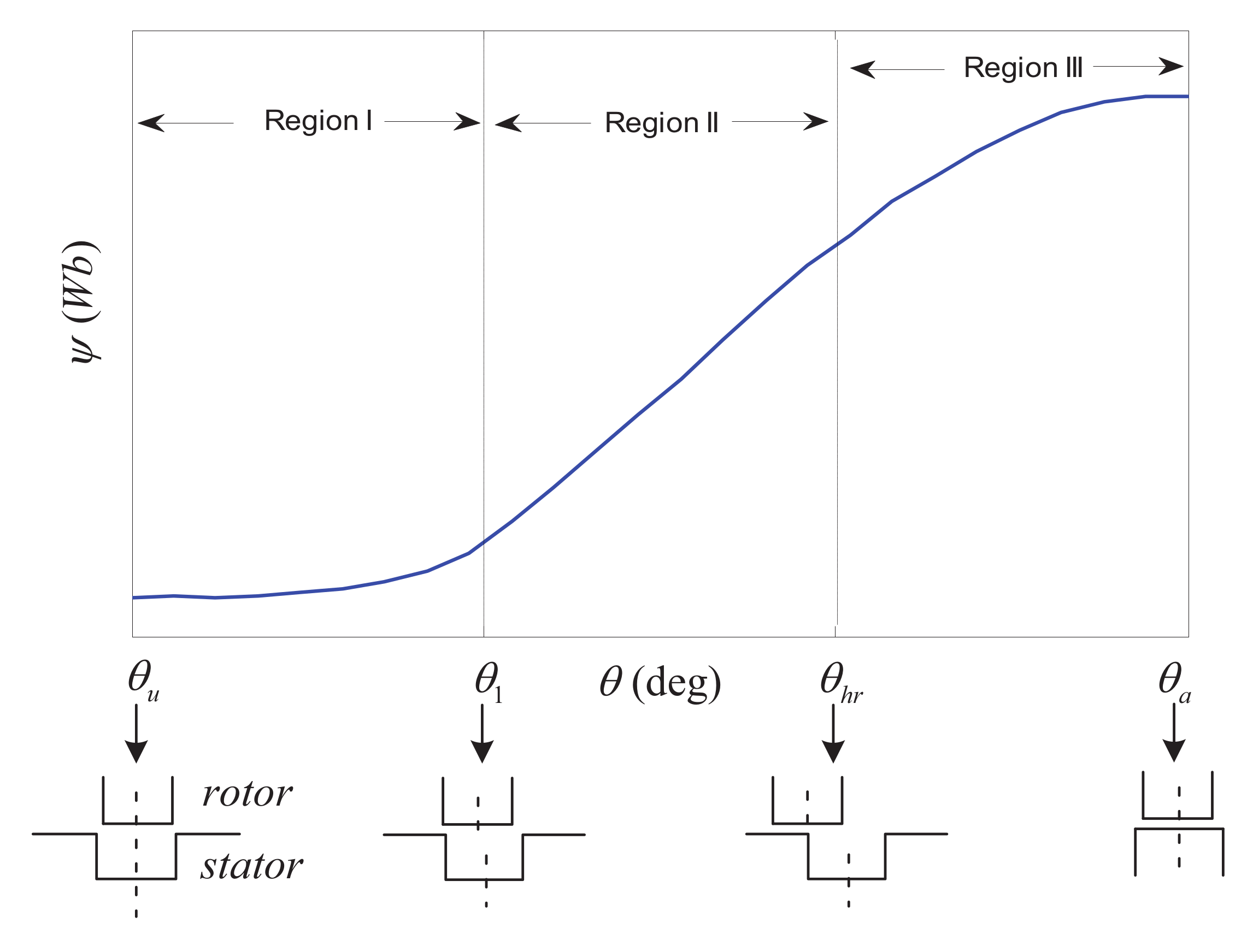
3. Modeling the Entire Flux-Linkage Characteristics
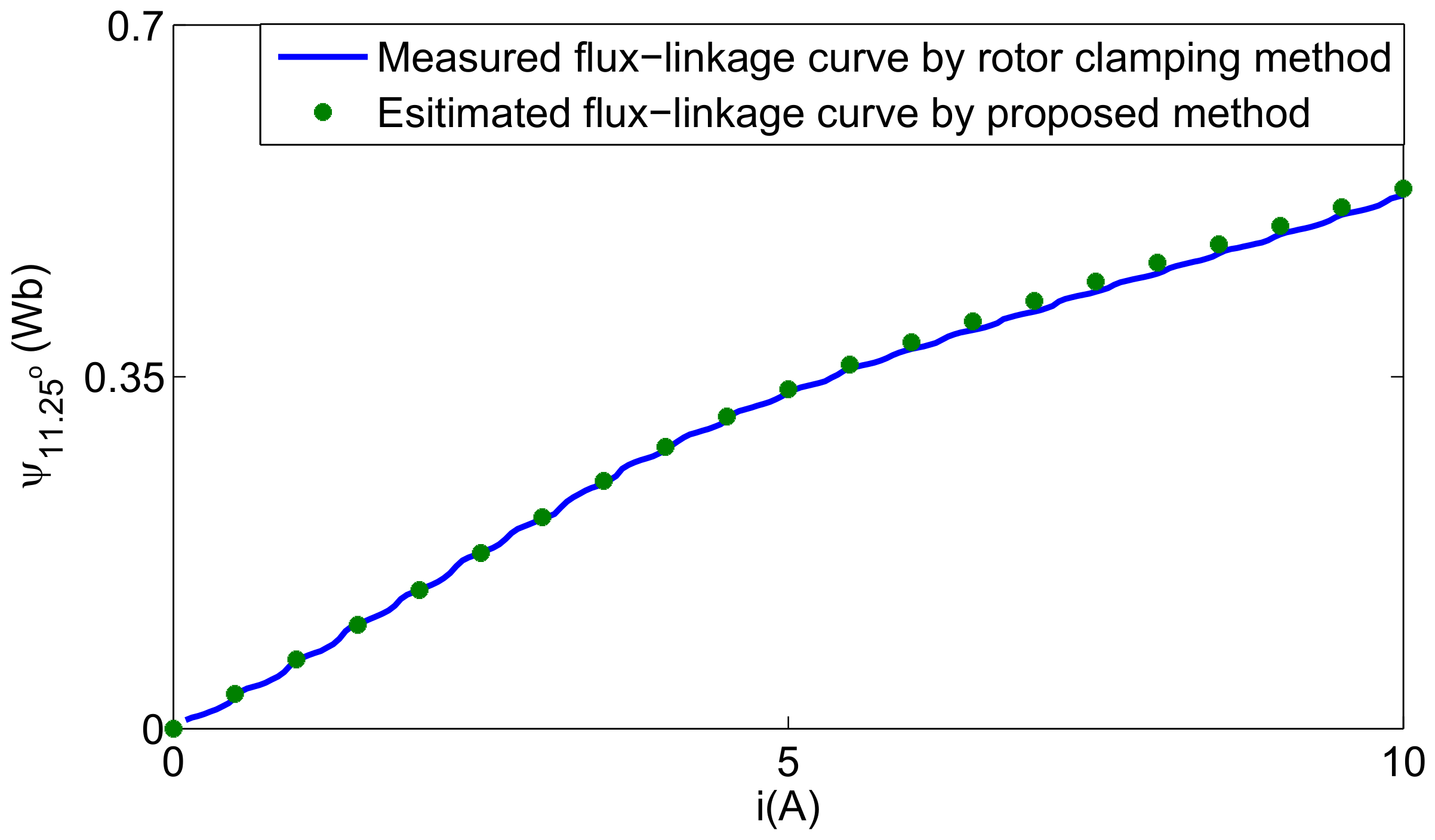
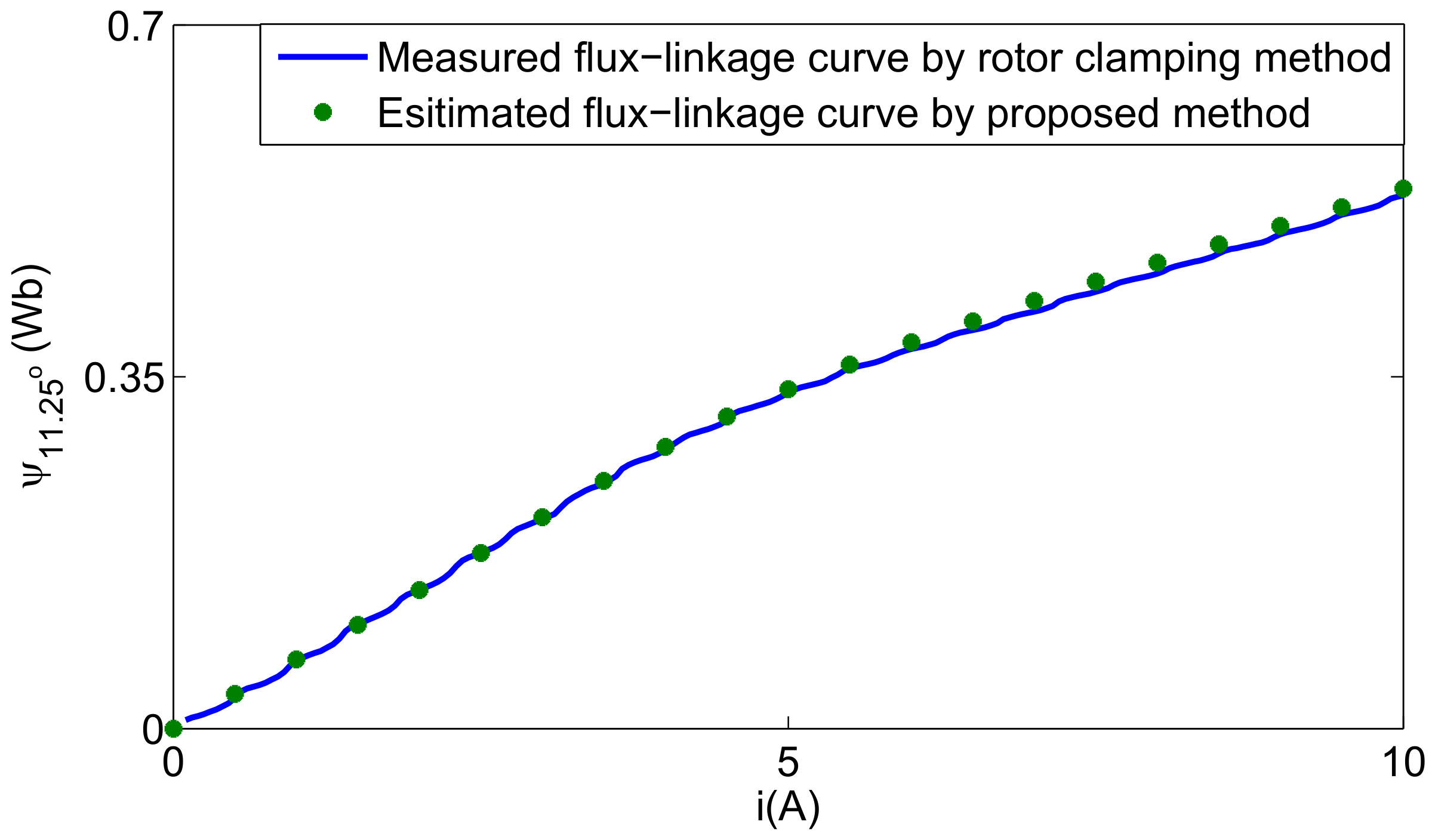
3.1. Solving the Flux-Linkage Curve at the Middle Position
3.2. Five-Order Fourier Series Flux-Linkage Model
3.3. Electromagnetic Torque Characteristics
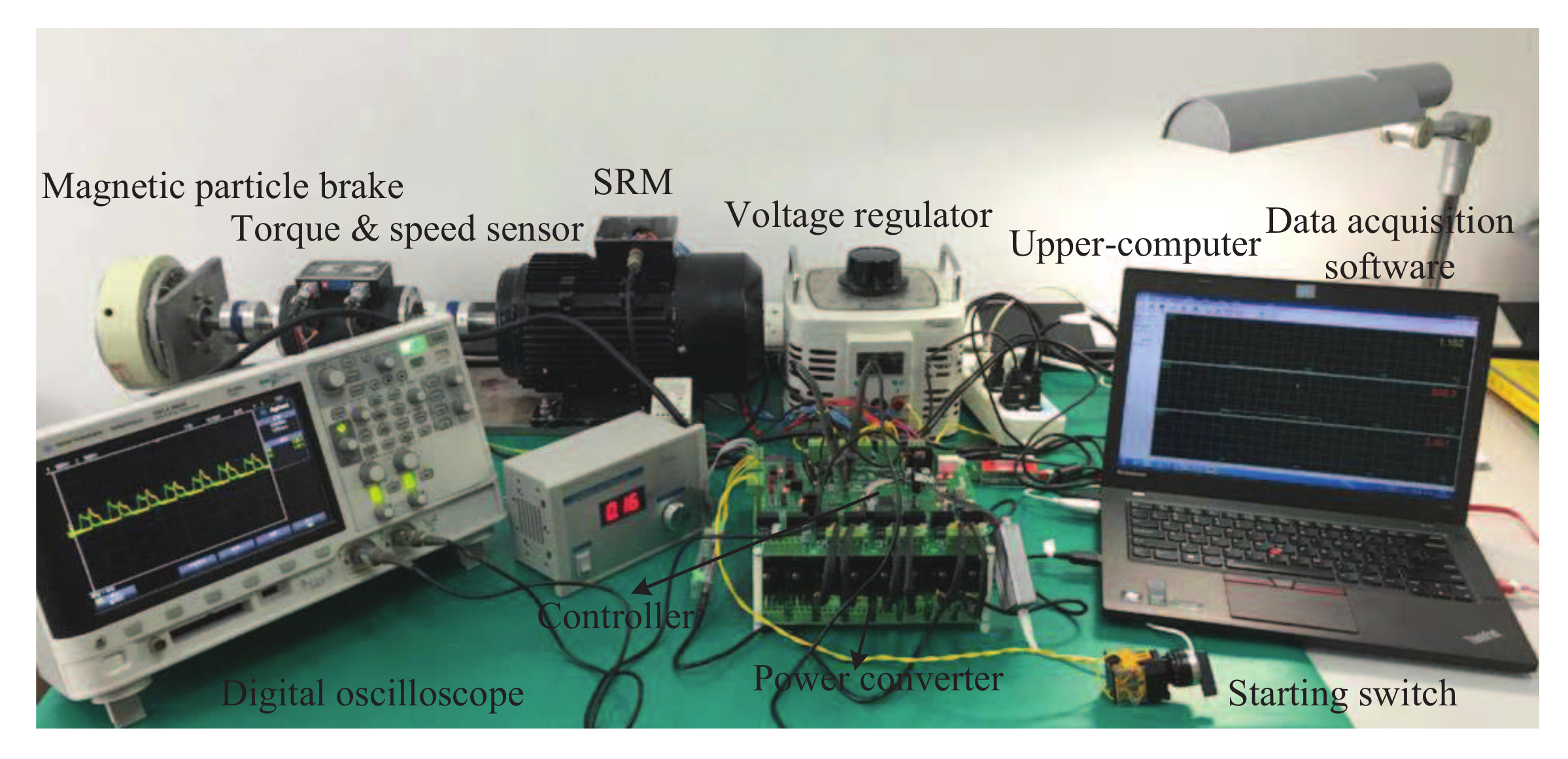
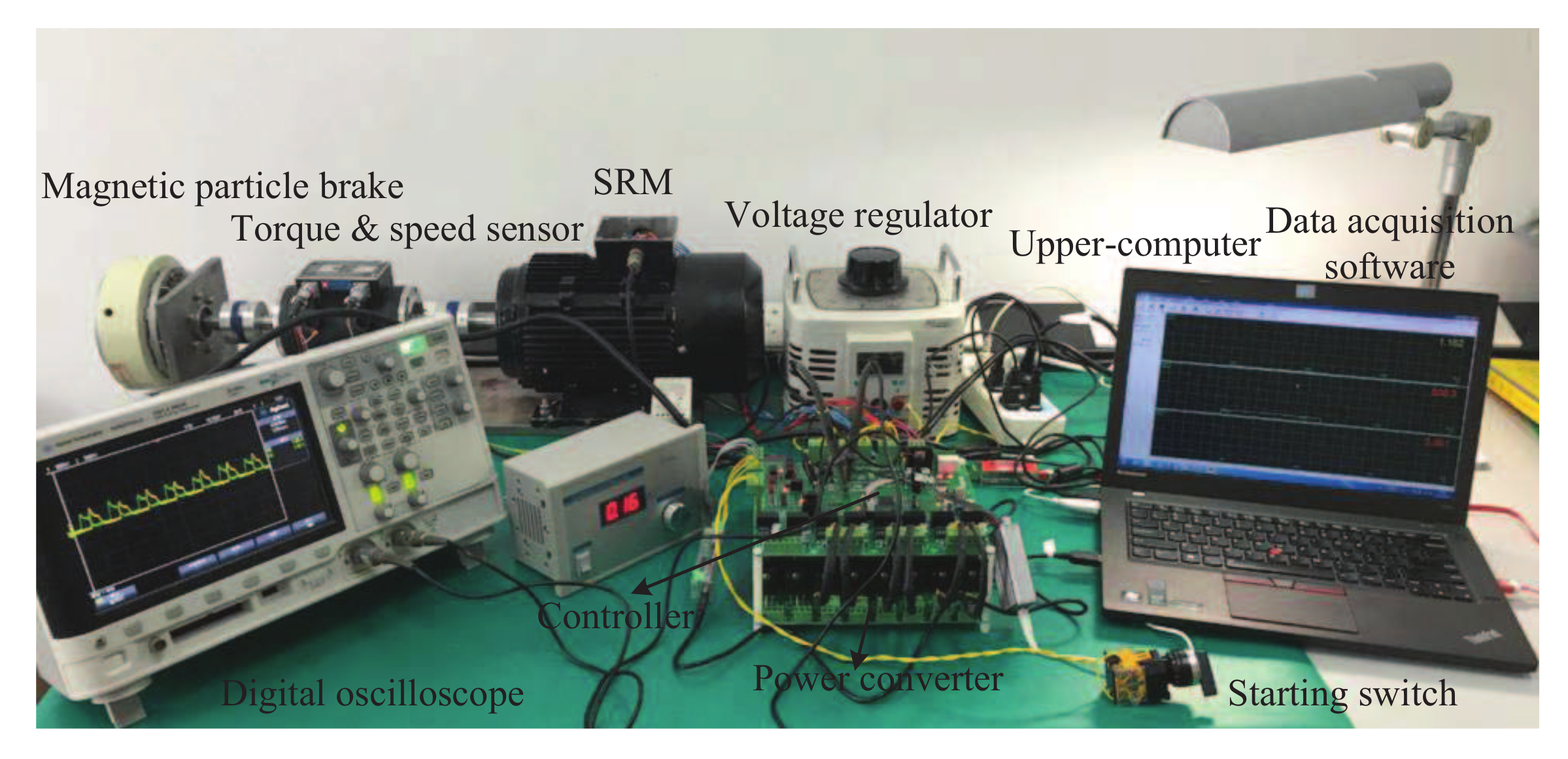
4. Dynamic Simulation and Experiment
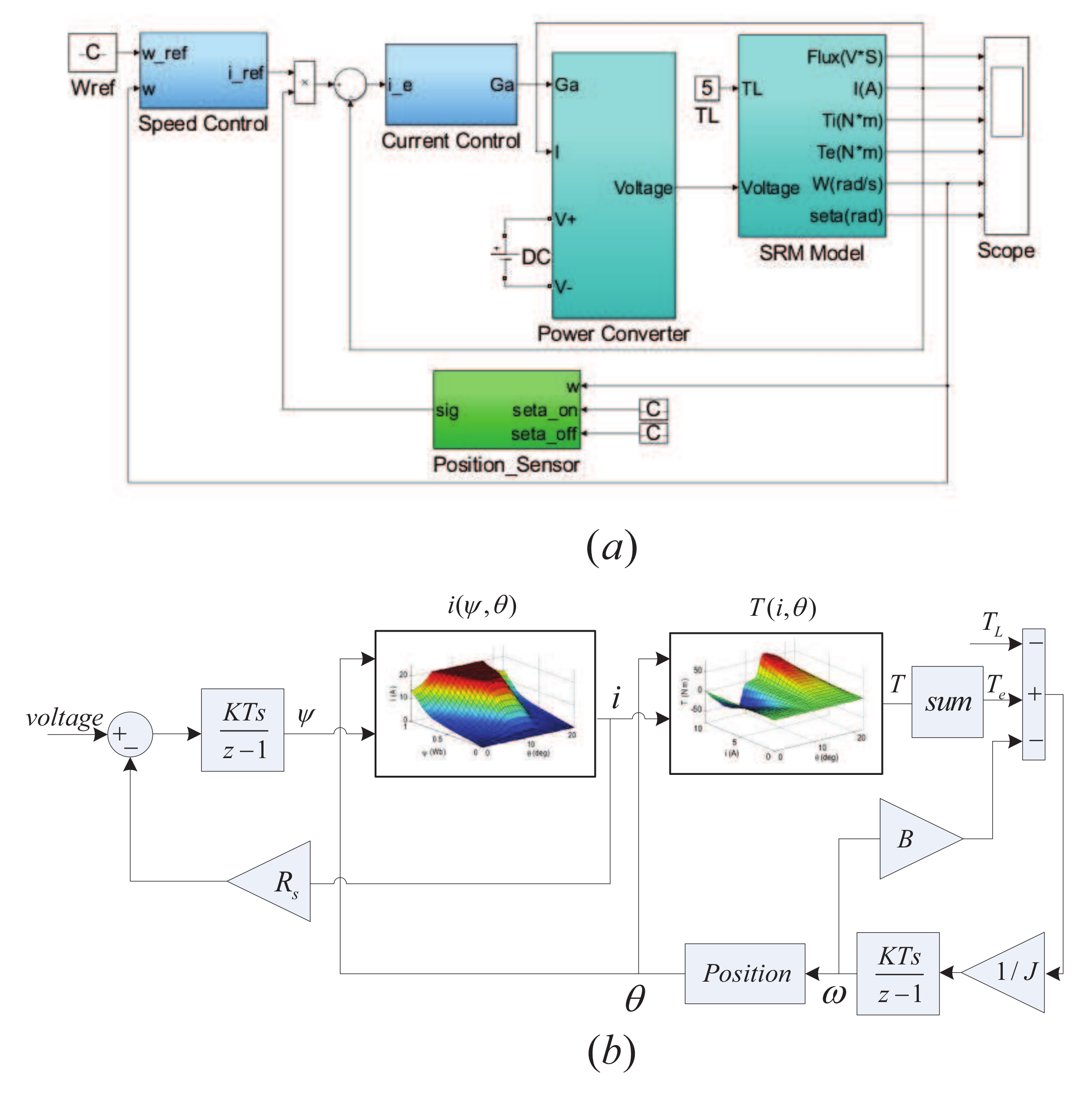
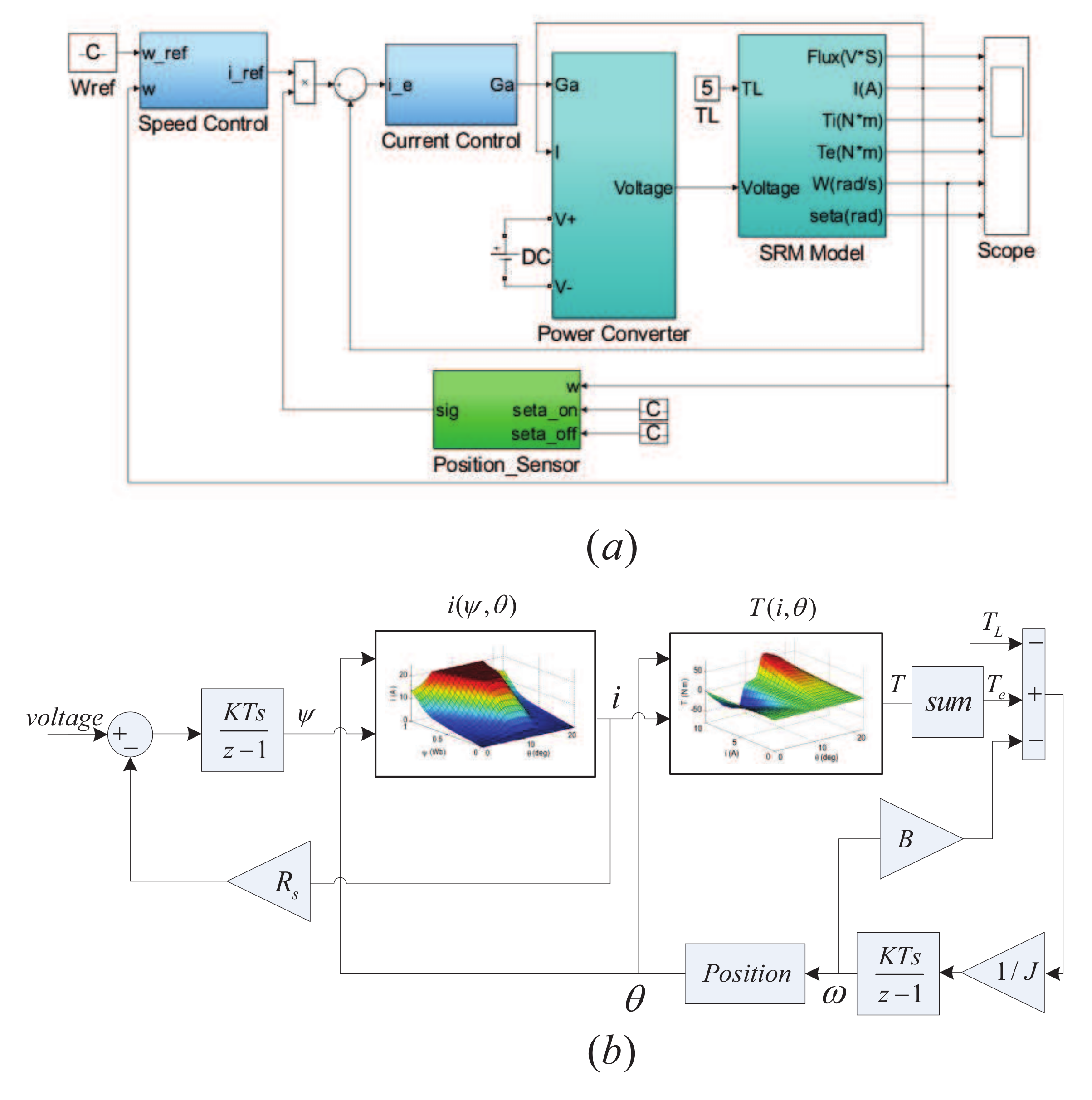
4.1. Dynamic Simulation Model
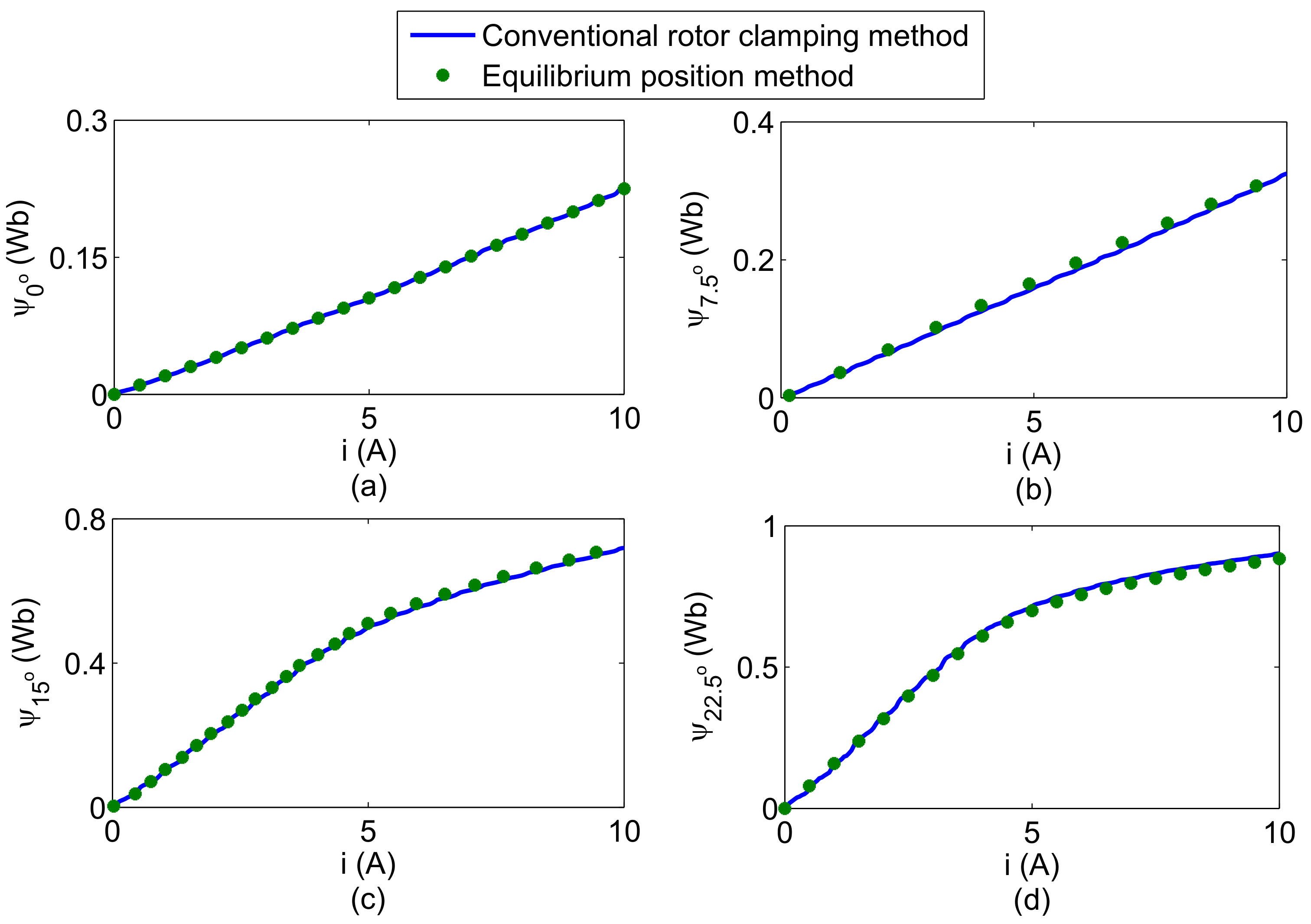
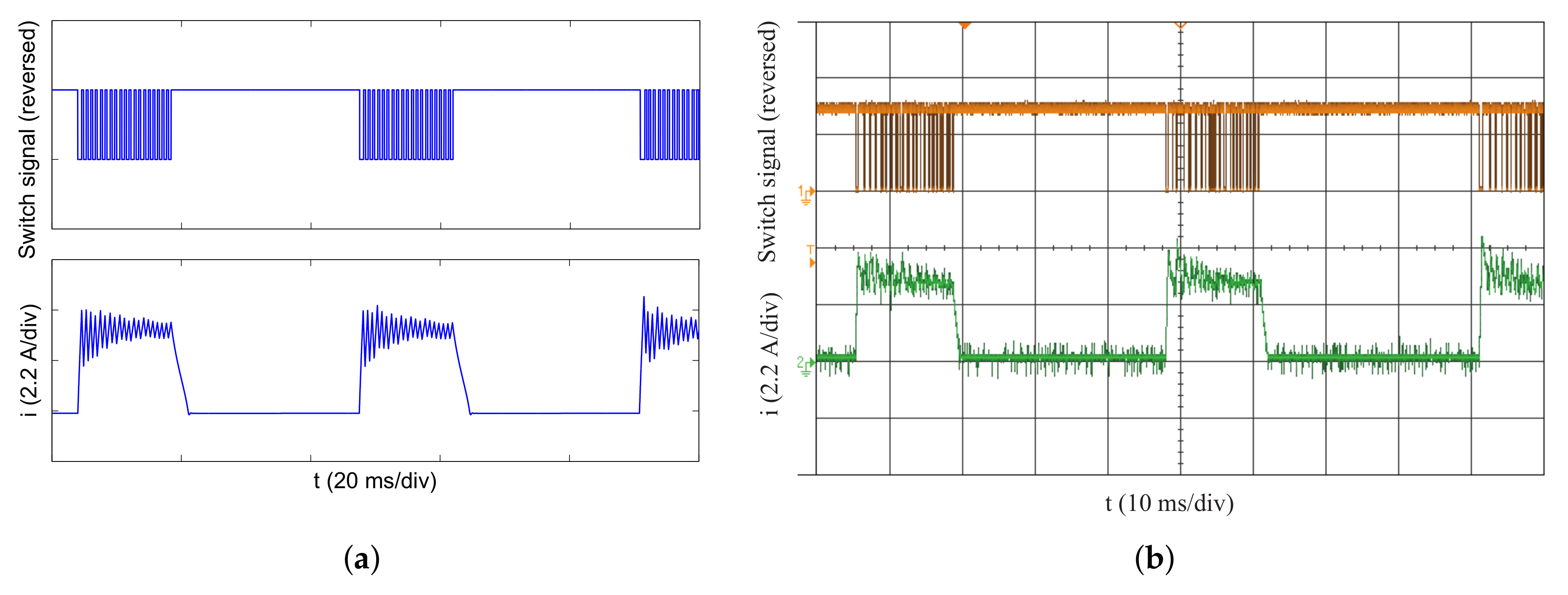
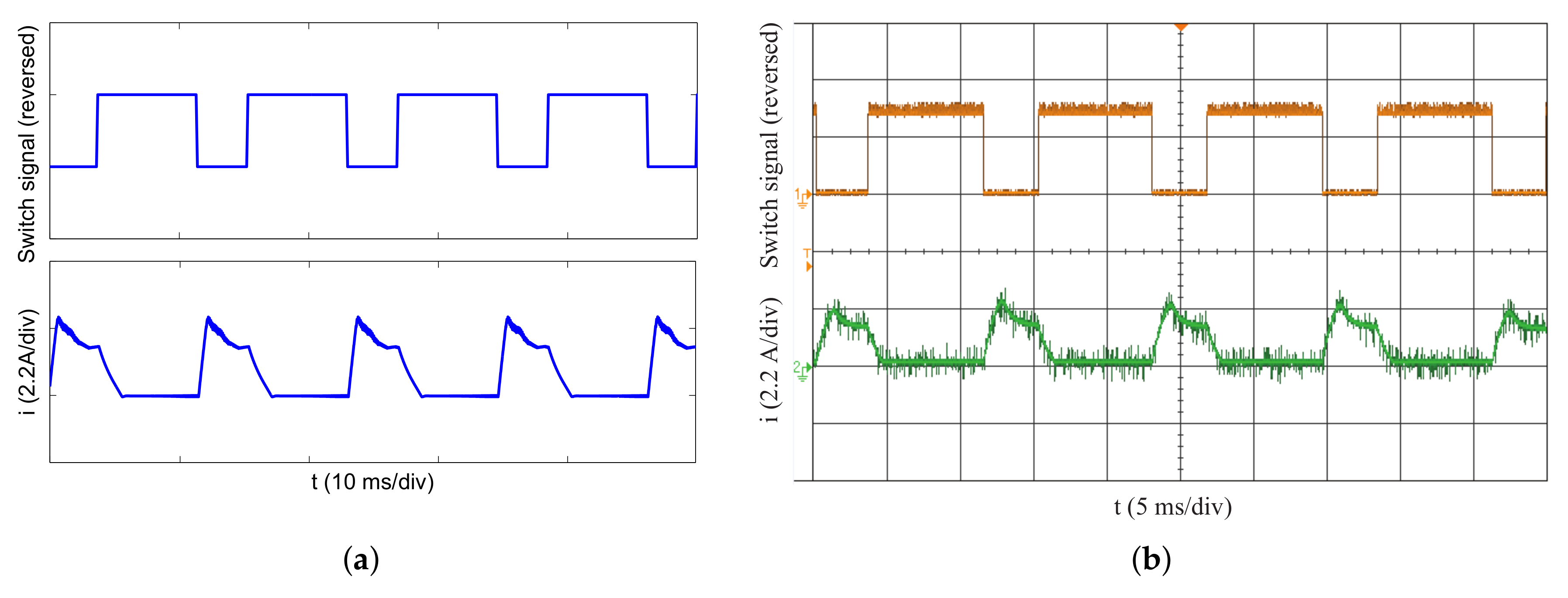
4.2. Results Comparison
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kiyota, K.; Sugimoto, H.; Chiba, A. Comparing electric motors: An analysis using four standard driving schedules. IEEE Ind. Appl. Mag. 2014, 20, 12–20. [Google Scholar] [CrossRef]
- Miller, T. Optimal design of switched reluctance motors. IEEE Trans. Ind. Electron. 2002, 49, 15–27. [Google Scholar] [CrossRef]
- Bostanci, E.; Moallem, M.; Parsapour, A.; Fahimi, B. Opportunities and challenges of switched reluctance motor drives for electric propulsion: A comparative study. IEEE Ind. Appl. Mag. 2014, 20, 12–20. [Google Scholar] [CrossRef]
- Nezamabadi, M.M.; Afjei, E. Switched reluctance motor for hybrid motion control: Design, modelling, and sensorless drive. IET Electr. Power Appl. 2016, 10, 498–507. [Google Scholar] [CrossRef]
- Parreira, B.; Rafael, S.; Pires, A.J.; Branco, P.J.C. Obtaining the magnetic characteristics of an 8/6 switched reluctance machine: From FEM analysis to the experimental tests. IEEE Trans. Ind. Electron. 2005, 52, 1635–1643. [Google Scholar] [CrossRef]
- Song, S.; Ge, L.; Ma, S.; Zhang, M.; Wang, L. Accurate measurement and detailed evaluation of static electromagnetic characteristics of switched reluctance machines. IEEE Trans. Instrum. Meas. 2015, 64, 704–714. [Google Scholar] [CrossRef]
- Gobbi, R.; Sahoo, N.C.; Vejian, R. Experimental investigations on computer-based methods for determination of static electromagnetic characteristics of switched reluctance motors. IEEE Trans. Instrum. Meas. 2008, 57, 2196–2211. [Google Scholar] [CrossRef]
- Xue, X.D.; Cheng, K.W.E.; Ho, S.L. Simulation of switched reluctance motor drives using two-dimensional bicubic spline. IEEE Trans. Energy Convers. 2002, 17, 471–477. [Google Scholar] [CrossRef]
- Elmas, C.; Sagiroglu, S.; Colak, I.; Bal, G. Modelling of a nonlinear switched reluctance drive based on artificial neural network. In Proceedings of the Fifth International Conference on Power Electronics and Variable-Speed Drives, London, UK, 26–28 October 1994; pp. 7–12. [Google Scholar]
- Lu, W.; Keyhani, A.; Fardoun, A. Neural network-based modeling and parameters identification of switched reluctance motors. IEEE Trans. Energy Convers. 2003, 18, 284–290. [Google Scholar]
- Zhong, R.; Xu, Y.; Cao, Y.; Guo, X.; Hua, W.; Xu, S.; Sun, W. Accurate model of switched reluctance motor based on indirect measurement method and least square support vector machine. IET Electr. Power Appl. 2016, 10, 916–922. [Google Scholar] [CrossRef]
- Chen, H.; Han, G.; Yan, W.; Lu, S.; Chen, Z. Modeling of a switched reluctance motor under stator winding fault condition. IEEE Trans. Appl. Supercond. 2016, 26. [Google Scholar] [CrossRef]
- Liang, D.; Ding, W. Modelling and predicting of a switched reluctance motor drive using radial basis function network-based adaptive fuzzy system. IET Electr. Power Appl. 2008, 3, 218–230. [Google Scholar] [CrossRef]
- Lachman, T.; Mohamad, T.R.; Fong, C.H. Nonlinear modelling of switching reluctance motors using artificial intelligence techniques. IET Electr. Power Appl. 2004, 151, 23–60. [Google Scholar]
- Hossain, S.A.; Husain, I. A geometry based simplified analytical model of switched reluctance machines for real-time controller implementation. IEEE Trans. Power Electron. 2003, 19, 1384–1389. [Google Scholar] [CrossRef]
- Bernat, J.; Stepien, S.; Sykulski, J.K. Determining Switched Reluctance Motor Current Waveforms Exploiting the Transformation from the Time to the Position Domain. Energies 2017, 10, 799. [Google Scholar] [CrossRef]
- Tan, C.; Wang, H.; Chen, L. Analytical method for the prediction of natural frequencies of switched reluctance motor based on electromechanical analogy method. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2018, 37, 224–241. [Google Scholar] [CrossRef]
- Khalil, A.; Husain, I. A fourier series generalized geometry-based analytical model of switched reluctance machines. IEEE Trans. Ind. Appl. 2007, 43, 673–684. [Google Scholar] [CrossRef]
- Song, S.; Zhang, M.; Ge, L. A new decoupled analytical modeling method for switched reluctance machine. IEEE Trans. Magn. 2015, 51. [Google Scholar] [CrossRef]
- Chi, H.P.; Lin, R.L.; Chen, J.F. Simplified flux-linkage model for switched-reluctance motors. IEE Proc. Electr. Power Appl. 2005, 152, 577–583. [Google Scholar] [CrossRef]
- Song, S.; Zhang, M.; Ge, L. A new fast method for obtaining flux-linage characteristics of SRM. IEEE Trans. Ind. Electron. 2015, 62, 4105–4117. [Google Scholar] [CrossRef]
- Fahimi, B.; Suresh, G.; Mahdavi, J.; Ehsani, M. A new approach to model switched reluctance motor drive application to dynamic performance prediction, control and design. In Proceedings of the 29th Annual IEEE Power Electronics Specialists Conference, Fukuoka, Japan, 22 May 1998; pp. 2097–2102. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| a1 | a2 | a3 | a4 | a5 | a6 | a7 | |
|---|---|---|---|---|---|---|---|
| 2.0721 × 10−2 | −9.3272 × 10−4 | 5.8819 × 10−4 | −1.4294 × 10−4 | 1.8268 × 10−5 | −1.1749 × 10−6 | 3.0049 × 10−8 | |
| 3.3840 × 10−2 | −1.6889 × 10−4 | 4.0050 × 10−4 | −1.5927 × 10−4 | 2.4348 × 10−5 | −1.6901 × 10−6 | 4.4997 × 10−8 | |
| 7.5204 × 10−2 | −1.1415 × 10−2 | 7.7113 × 10−3 | −2.1972 × 10−3 | 2.8990 × 10−4 | −1.8323 × 10−5 | 4.5204 × 10−7 | |
| 1.0796 × 10−1 | −1.1565 × 10−2 | 1.0335 × 10−2 | −3.2401 × 10−3 | 4.3797 × 10−4 | −2.7691 × 10−5 | 6.7627 × 10−7 | |
| 1.7879 × 10−1 | −3.1390 × 10−2 | 2.1949 × 10−2 | −6.9017 × 10−3 | 9.7977 × 10−4 | −6.5724 × 10−5 | 1.7067 × 10−6 |
| Parameter | Value |
|---|---|
| Phase | 3 |
| Stator/rotor poles | 12/8 |
| Rated power | 1.5 kW |
| Rated torque | 9.55 N·m |
| Speed range of constant torque | 100–1500 r/min |
| Maximum flux linkage | 0.986 Wb |
| Stator resistance | 0.9 Ω |
| Moment of inertia | 0.01 kg·m2 |
| Friction coefficient | 0.005 N·m·s |
| Aligned inductance | 154 mH |
| Unaligned inductance | 23 mH |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Wang, G.; Liu, J.; Li, Y.; Fan, Y. A Novel Method for Modeling the Electromagnetic Characteristics of Switched Reluctance Motors. Appl. Sci. 2018, 8, 537. https://doi.org/10.3390/app8040537
Li C, Wang G, Liu J, Li Y, Fan Y. A Novel Method for Modeling the Electromagnetic Characteristics of Switched Reluctance Motors. Applied Sciences. 2018; 8(4):537. https://doi.org/10.3390/app8040537
Chicago/Turabian StyleLi, Cunhe, Guofeng Wang, Jian Liu, Yan Li, and Yunsheng Fan. 2018. "A Novel Method for Modeling the Electromagnetic Characteristics of Switched Reluctance Motors" Applied Sciences 8, no. 4: 537. https://doi.org/10.3390/app8040537
APA StyleLi, C., Wang, G., Liu, J., Li, Y., & Fan, Y. (2018). A Novel Method for Modeling the Electromagnetic Characteristics of Switched Reluctance Motors. Applied Sciences, 8(4), 537. https://doi.org/10.3390/app8040537