Localized Space-Time Autoregressive Parameters Estimation for Traffic Flow Prediction in Urban Road Networks



Abstract
:1. Introduction
- An LSTAR model with lower computational complexity based on the LSTARIMA was proposed. In the LSTARIMA model of Cheng et al. [13], the same weight matrix W was used for AR and MA components of the whole road network. We used different matrices, W and U, for AR and MA components. And individual observation was used instead of the N-dimension column vector to allow each road to have its own weight matrix W, U. Since the ARMA model can be properly approximated by a high-order AR model, we further developed the reconstructed LSTARIMA model into our proposed LSTAR model.
- A more reasonable weight matrix and new traffic information collection with the Vehicular Ad hoc Networks (VANET) approach was proposed. As the number of vehicles output from upstream roads has more impact on the future traffic condition compared to speed difference, it was used to determine the dynamic spatial weights instead of the speed difference. To obtain the traffic information needed for weight matrix determination, the vehicles stopped at red lights were used to collect traffic information via VANET.
- Two theorems were given and verified for parameter estimation of our proposed LSTAR model. When the distribution of traffic flow is stable, the weight matrix can be treated as time invariant. When the traffic flow distribution is not stable, the weight matrix is time variant. For these two different cases, we provided two theorems to determine the parameters.
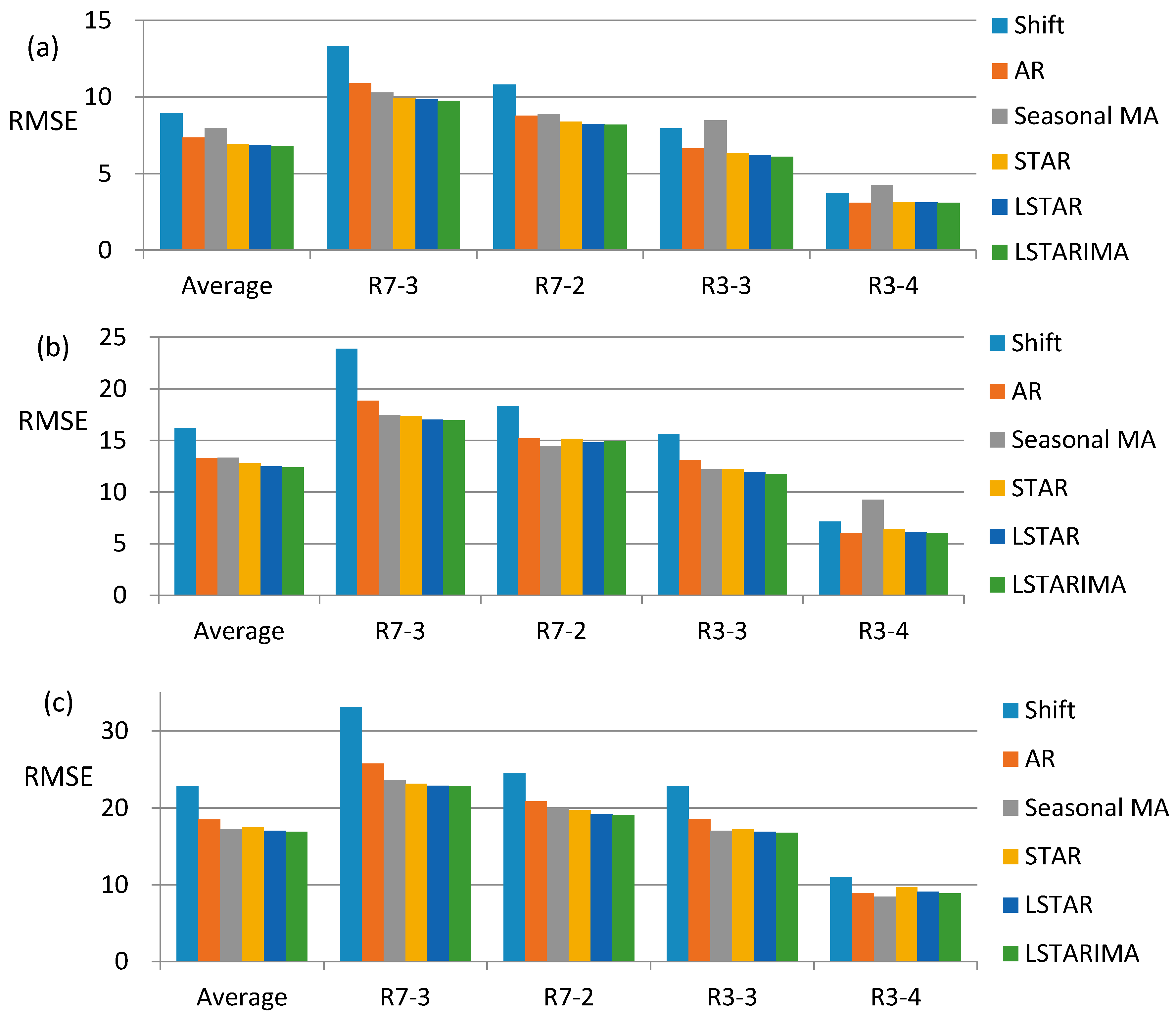
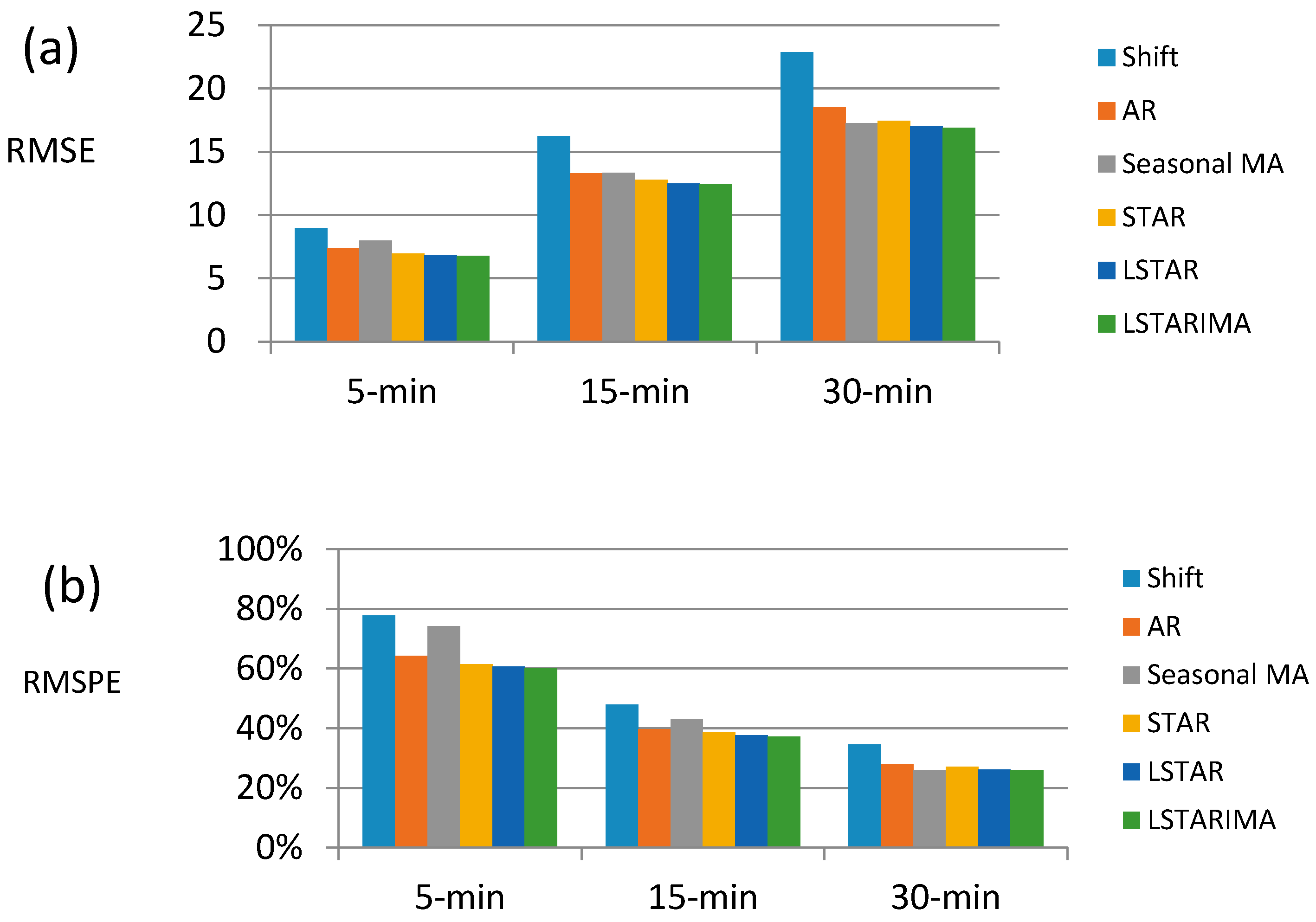
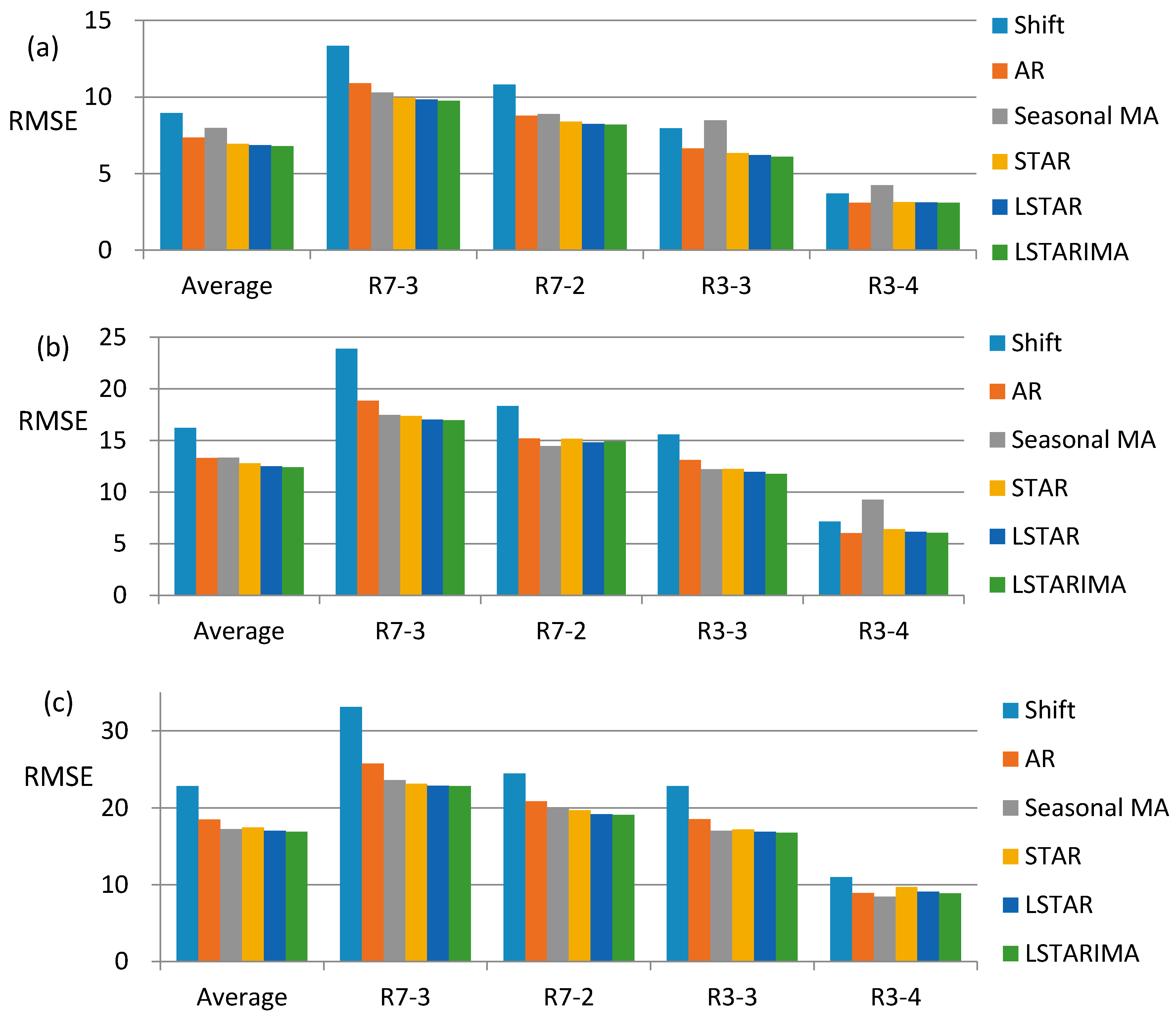
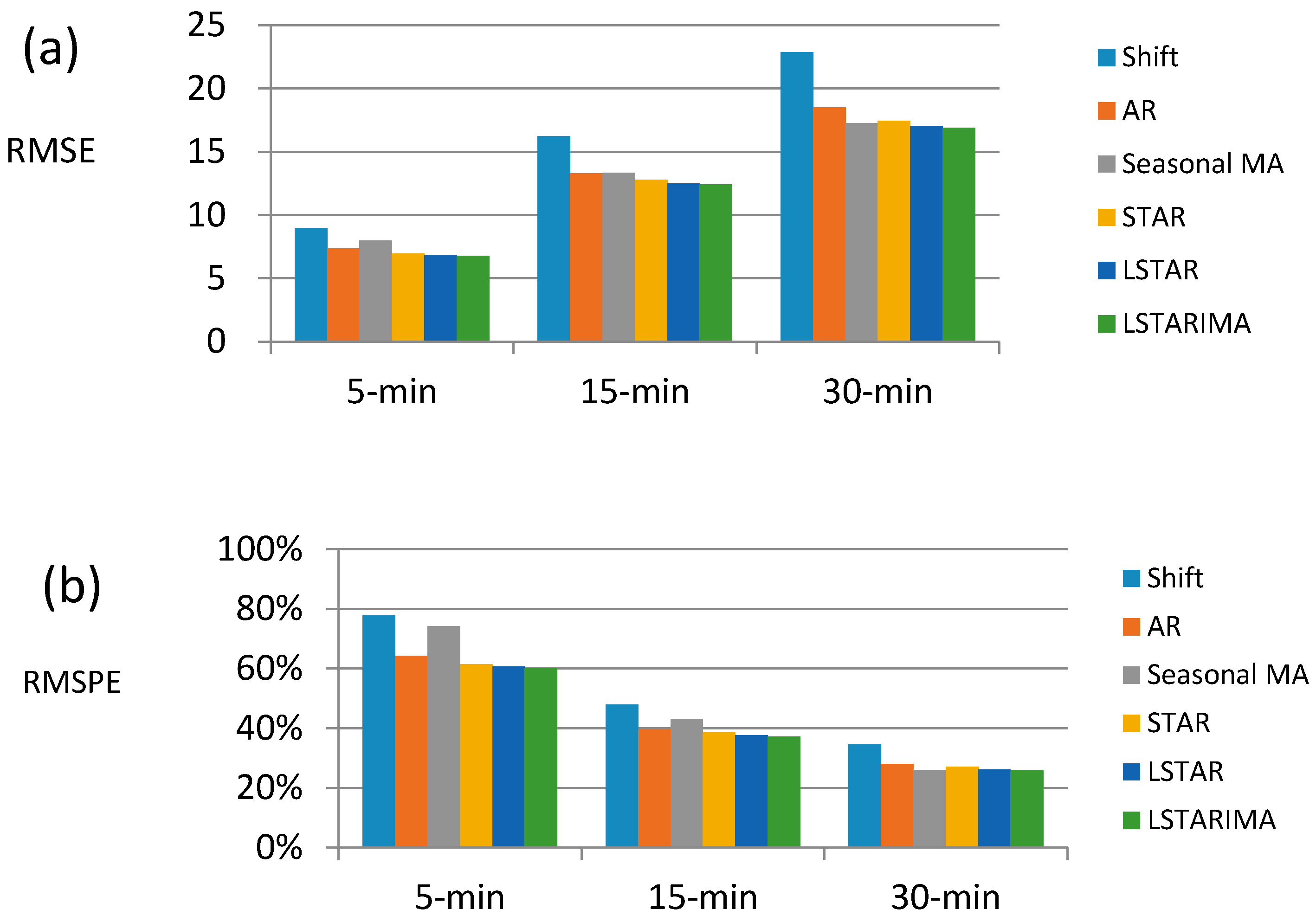
- Related simulations were performed. Through the simulation results, we observed that the prediction accuracy of LSTAR was a bit lower than the LSTARIMA model. However, the computational complexity of the LSTAR model was also lower than the LSTARIMA model. Therefore, there existed a tradeoff between the prediction accuracy and the computational complexity for the two models.
2. State-of-the-Art and Related Topics
2.1. Traffic Information Collection
2.2. Traffic Prediction
2.3. Urban Traffic Applications
3. Model and Preliminaries
3.1. LSTAR Model Construction
3.2. Weight Matrix Construction
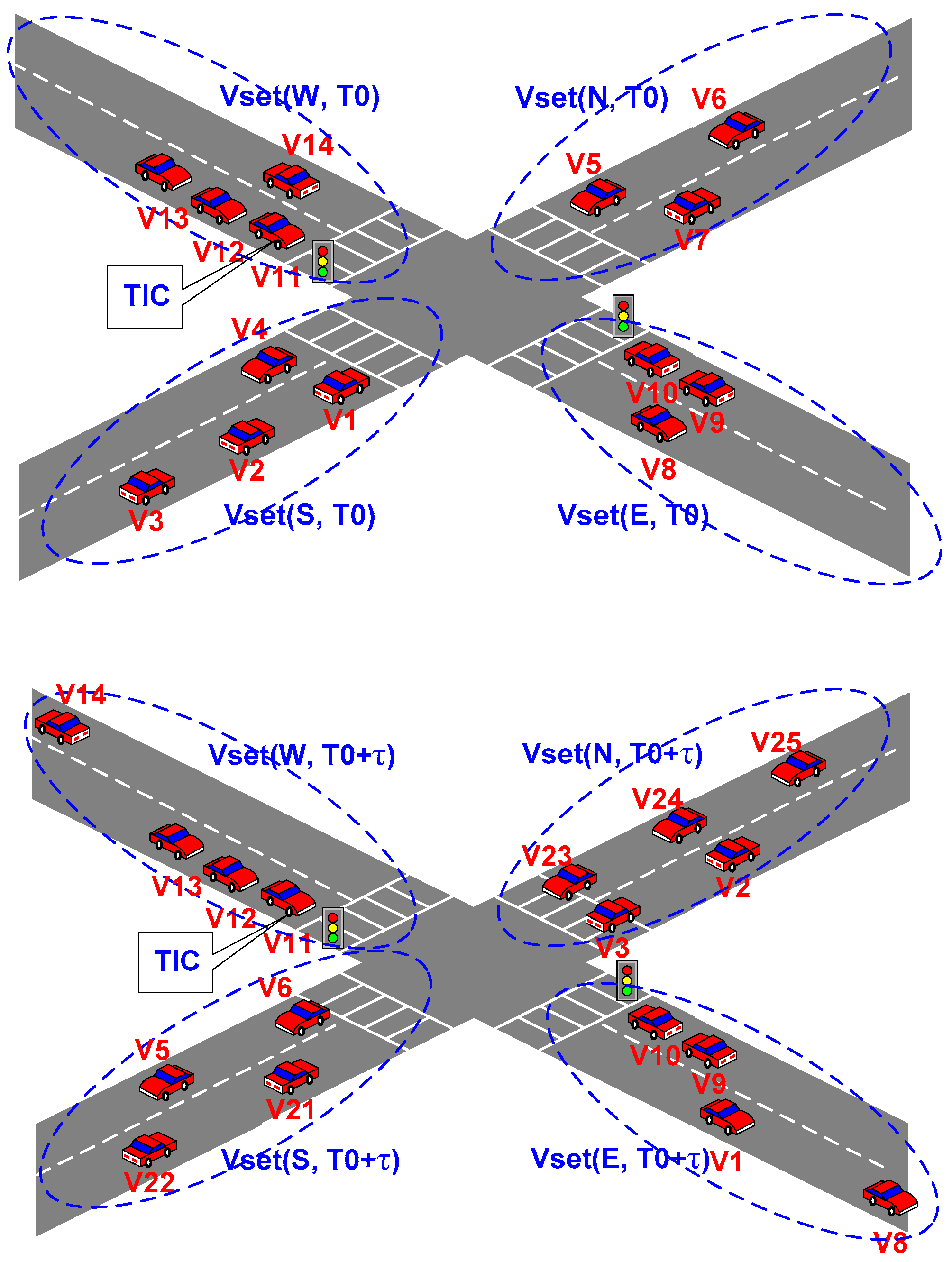
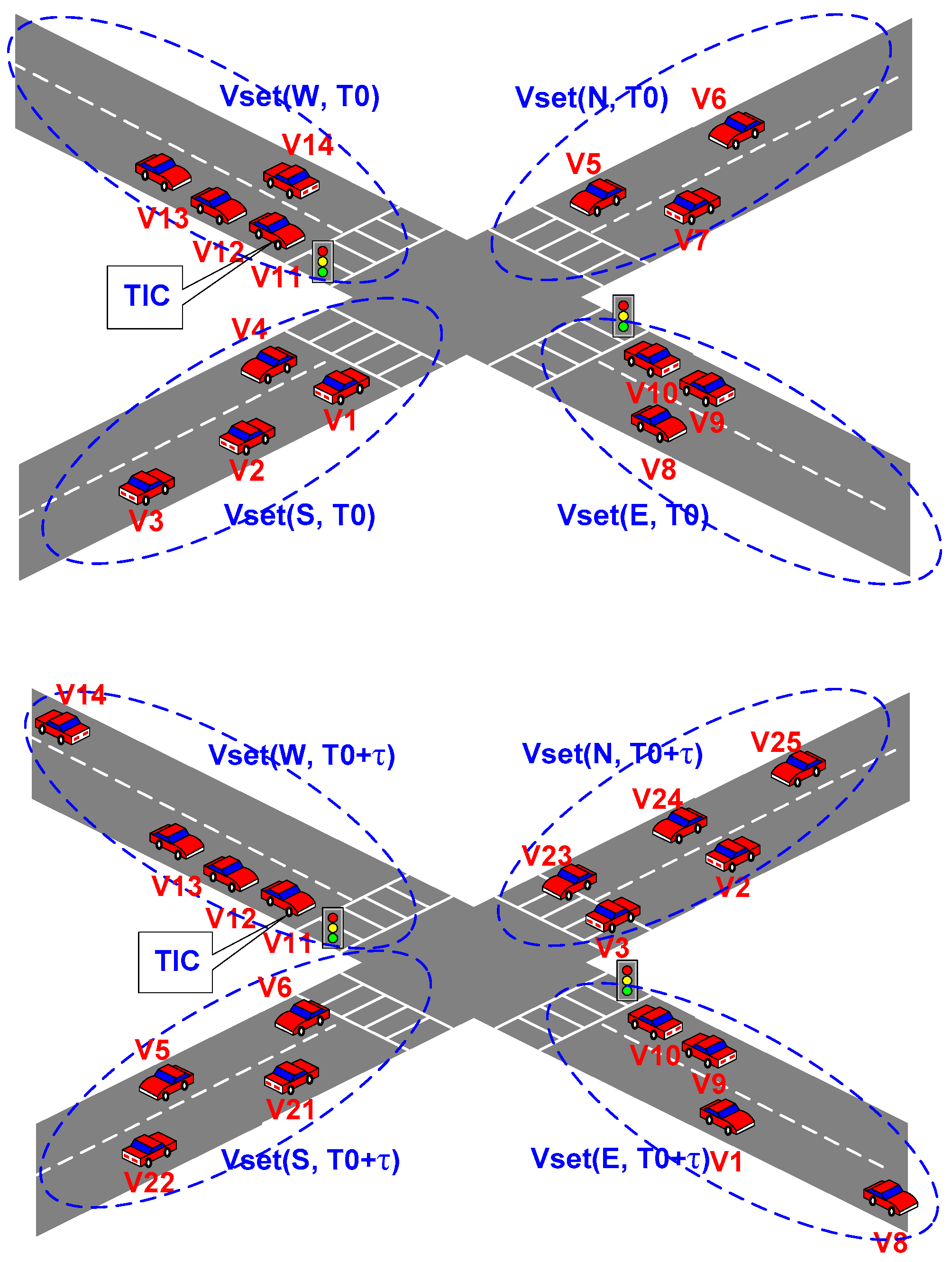
3.3. Traffic Information Collection
- Step 1.
- When the traffic light turns to red at T0, V11 broadcasts traffic information collection request.
- Step 2.
- All of the vehicles in the communication range of V11 will report their locations to V11 after receiving the request from V11.
- Step 3.
- V11 catalogs the vehicles to four vehicle sets according to the location. They are marked as , , , and .
- Step 4.
- After time , V11 collects the traffic information again according to Steps 1–3 and obtains , , , . is the maximum allowed velocity. Time will let all vehicles running towards the intersection be detectable at time .For example:If R = 150 m and , = 5 s can be used as . The maximal length a vehicle can run during is . Then, no vehicle entering the intersection at T0 can run outside the communication range of V11 and be detectable at .
- Step 5.
- The vehicles’ set run from road A to road B is calculated by formula: .For example:
- Step 6.
- The TIC calculates the traffic output of each road with time interval until the traffic light for the east-west direction turns green. As the traffic light for the south-north direction turns red, the first vehicle stopped at the north or south side will be selected as the TIC and collect traffic information continuously.
4. Main Results
5. Practical Example and Experimental Evaluation
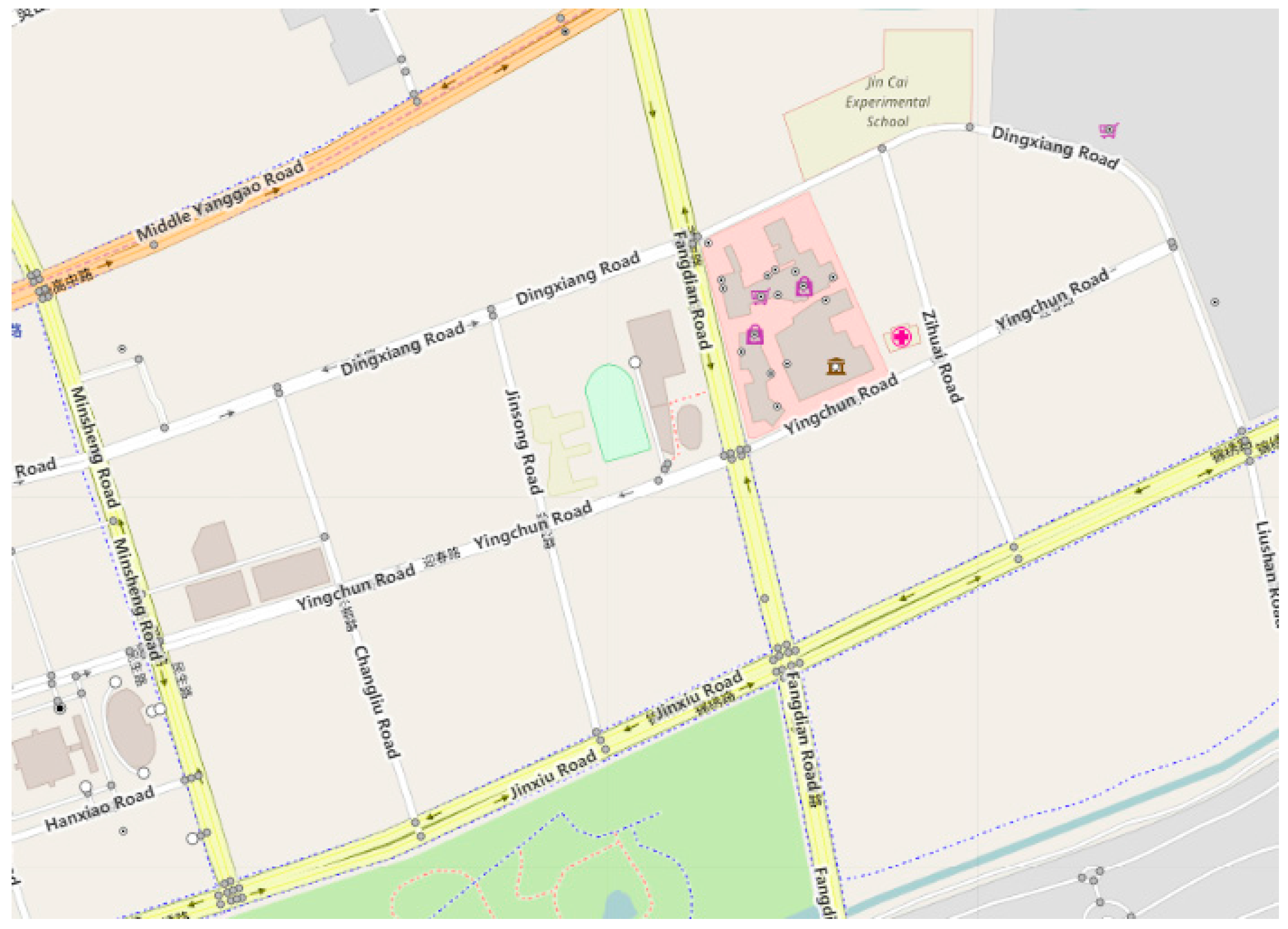
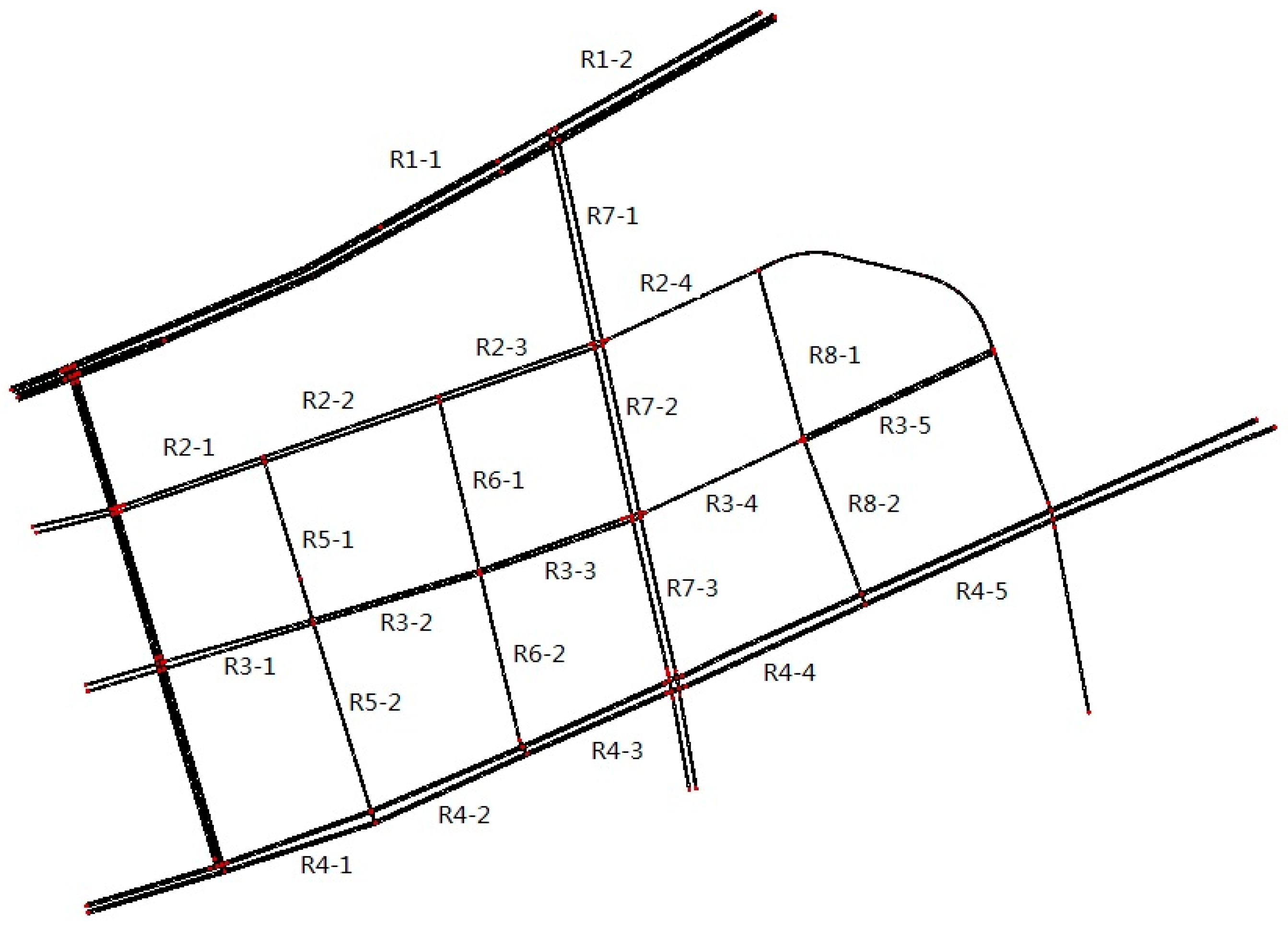
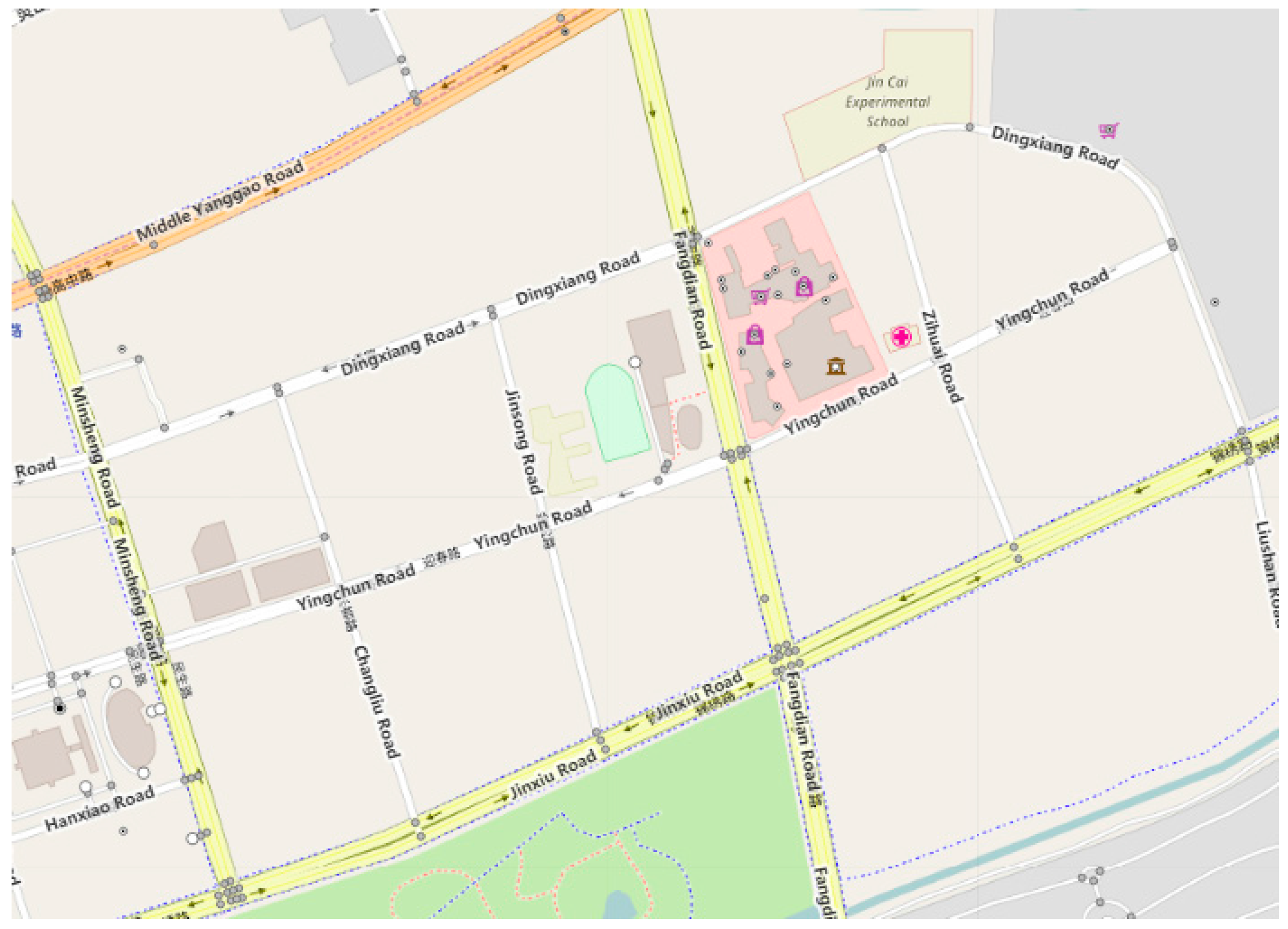
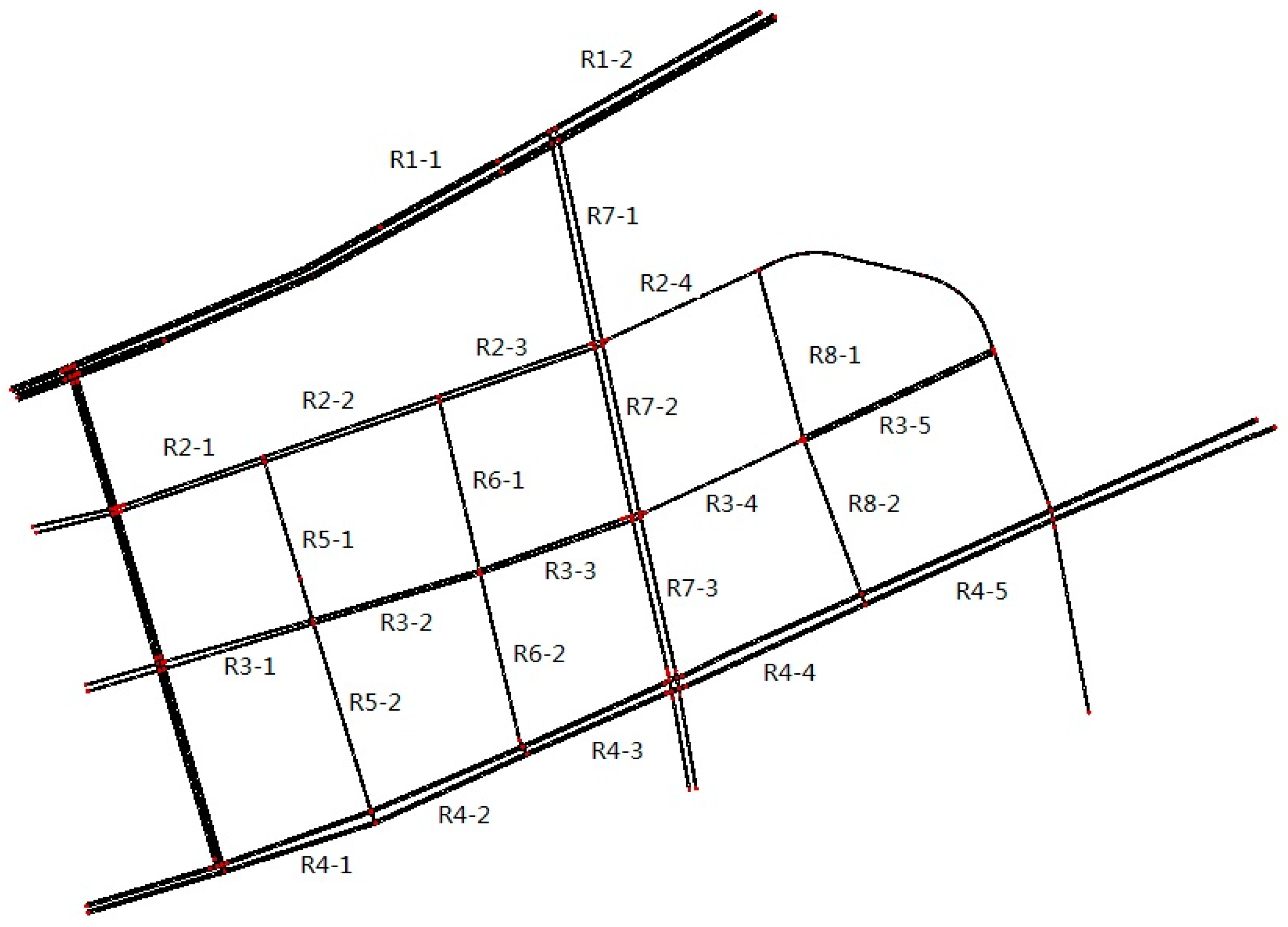
5.1. Practical Example
Construction of a Dynamic Spatial Weight Matrix
5.2. Experimental Evaluation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- United States Department of Transportation, National Transportation Statistics. Table 1-72: Annual Highway Congestion Cost. 2017. Available online: https://www.rita.dot.gov/bts/sites/rita.dot.gov.bts/files/NTS_Entire_2017Q2.pdf (accessed on 8 January 2018).
- Alam, M.; Ferreira, J.; Fonseca, J. Introduction to Intelligent Transportation Systems; Springer: Cham, Switzerland, 2016; pp. 552–557. [Google Scholar] [CrossRef]
- Kong, Q.J.; Xu, Y.; Lin, S.; Wen, D.; Zhu, F.; Liu, Y. UTN-Model-Based Traffic Flow Prediction for Parallel-Transportation Management Systems. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1541–1547. [Google Scholar] [CrossRef]
- Lighthill, M.J.; Whitham, G.B. On kinematic waves II. A therory of traffic flow on long crowded roads. Proc. R. Soc. A Math. Phys. Eng. Sci. 1955, 229, 317–345. [Google Scholar] [CrossRef]
- Richards, P.I. Shock Waves on the Highway. Op. Res. 1956, 4, 42–51. [Google Scholar] [CrossRef]
- Tian, J.F.; Li, G.Y.; Treiber, M.; Jiang, R.; Jia, N.; Ma, S.F. Cellular automaton model simulating spatiotemporal patterns, phase transitions and concave growth pattern of oscillations in traffic flow. Trans. Res. B Methodol. 2016, 93, 560–575. [Google Scholar] [CrossRef]
- Box, G.E.; Jenkins, G.M. Time Series Analysis: Forecasting and Control; Holden-Day: Oakland, CA, USA, 1976; Volume 31, p. 303. [Google Scholar]
- Williams, B.M.; Hoel, L.A. Modeling and Forecasting Vehicular Traffic Flow as a Seasonal ARIMA Process: Theoretical Basis and Empirical Results. J. Trans. Eng. 2003, 129, 664–672. [Google Scholar] [CrossRef]
- Kamarianakis, Y.; Prastacos, P. Forecasting traffic flow conditions in an urban network—Comparison of multivariate and univariate approaches. Trans. Res. Rec. 2003, 74–84. [Google Scholar] [CrossRef]
- Pfeifer, P.E.; Deutsch, S.J. A Three-Stage Iterative Procedure for Space-Time Modeling. Technometrics 1980, 22, 35–47. [Google Scholar] [CrossRef]
- Kamarianakis, Y.; Prastacos, P. Space–time modeling of traffic flow. Comput. Geosci. 2005, 31, 119–133. [Google Scholar] [CrossRef]
- Min, X.; Hu, J.; Chen, Q.; Zhang, T.; Zhang, Y. Short-term traffic flow forecasting of urban network based on dynamic STARIMA model. In Proceedings of the International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Cheng, T.; Wang, J.; Haworth, J.; Heydecker, B.; Chow, A. A Dynamic Spatial Weight Matrix and Localized Space—Time Autoregressive Integrated Moving Average for Network Modeling. Geogr. Anal. 2014, 46, 75–97. [Google Scholar] [CrossRef]
- Wan, Y.; Huang, Y.; Buckles, B. Camera calibration and vehicle tracking: Highway traffic video analytics. Trans. Res. Part C 2014, 44, 202–213. [Google Scholar] [CrossRef]
- Mehta, V.; Chana, I. Urban Traffic State Estimation Techniques Using Probe Vehicles: A Review. In Computing and Network Sustainability; Vishwakarma, H., Akashe, S., Eds.; Lecture Notes in Networks and Systems; Springer: Singapore, 2017; Volume 12, pp. 273–281. [Google Scholar] [CrossRef]
- Lai, W.-K.; Kuo, T.-H.; Chen, C.-H. Vehicle Speed Estimation and Forecasting Methods Based on Cellular Floating Vehicle Data. Appl. Sci. 2016, 6, 47. [Google Scholar] [CrossRef]
- Zhang, G.; Xu, Y.; Wang, X.; Tian, X.; Liu, J.; Gan, X.; Qian, L. Multicast capacity for VANETs with directional antenna and delay constraint. IEEE J. Sel. Areas Commun. 2012, 30, 818–833. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, J.; Ren, J. Multicast capacity of cache enabled content-centric wireless Ad Hoc networks. China Commun. 2017, 14, 1–9. [Google Scholar] [CrossRef]
- Ren, J.; Zhang, G.; Li, D. Multicast capacity for VANETs with directional antenna and delay constraint under random walk mobility model. IEEE Access 2017, 5, 3958–3970. [Google Scholar] [CrossRef]
- Guo, C.; Li, D.; Zhang, G.; Cui, Z. Data delivery delay reduction for VANETs on bi-directional roadway. IEEE Access 2017, 4, 8514–8524. [Google Scholar] [CrossRef]
- Hussain, R.; Kim, S.; Oh, H. Traffic Information Dissemination System: Extending Cooperative Awareness among Smart Vehicles with Only Single-Hop Beacons in VANET. Wirel. Pers. Commun. 2016, 88, 151–172. [Google Scholar] [CrossRef]
- Li, D.; Li, Q.; Wang, J. Traffic information collecting algorithms for road selection decision support in vehicle ad hoc networks. Int. J. Simul. Proc. Modell. 2012, 7, 50–56. [Google Scholar] [CrossRef]
- Darwish, T.; Bakar, A.K. Traffic density estimation in vehicular ad hoc networks: A review. IEICE Trans. Inf. Syst. 2015, 24, 337–351. [Google Scholar] [CrossRef]
- Guo, J.; Huang, W.; Williams, B.M. Adaptive Kalman filter approach for stochastic short-term traffic flow rate prediction and uncertainty quantification. Transp. Res. Part C Emerg. Technol. 2014, 43, 50–64. [Google Scholar] [CrossRef]
- Abidin, A.F.; Kolberg, M. Towards improved vehicle arrival time prediction in public transportation: integrating SUMO and Kalman filter models. In Proceedings of the 2015 17th UKSim-AMSS International Conference on Modelling and Simulation (UKSim), Cambridge, UK, 25–27 March 2015; pp. 147–152. [Google Scholar] [CrossRef]
- Çetiner, B.G.; Sari, M.; Borat, O. A Neural Network Based Traffic-Flow Prediction Model. Math. Comput. Appl. 2010, 15, 269–278. [Google Scholar] [CrossRef]
- Tang, J.; Liu, F.; Zou, Y.; Zhang, W.; Wang, Y. An Improved Fuzzy Neural Network for Traffic Speed Prediction Considering Periodic Characteristic. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2340–2350. [Google Scholar] [CrossRef]
- Ma, Y.; Chowdhury, M.; Sadek, A.; Jeihani, M. Integrated Traffic and Communication Performance Evaluation of an Intelligent Vehicle Infrastructure Integration (VII) System for Online Travel-Time Prediction. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1369–1382. [Google Scholar] [CrossRef]
- Deng, L.; He, Z.; Zhong, R. The Bus Travel Time Prediction Based on Bayesian Networks. In Proceedings of the 2013 International Conference on Information Technology and Applications, Chengdu, China, 16–17 November 2013; pp. 282–285. [Google Scholar] [CrossRef]
- Yu, B.; Song, X.L.; Guan, F.; Yang, Z.M.; Yao, B.Z. k-Nearest Neighbor Model for Multiple-Time-Step Prediction of Short-Term Traffic Condition. J. Transp. Eng. 2016, 142. [Google Scholar] [CrossRef]
- Qi, Y.; Ishak, S. A Hidden Markov Model for short term prediction of traffic conditions on freeways. Transp. Res. Part C Emerg. Technol. 2014, 43, 95–111. [Google Scholar] [CrossRef]
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z.; Wang, F.Y. Traffic Flow Prediction With Big Data: A Deep Learning Approach. IEEE Trans. Intell. Transp. Syst. 2015, 16, 865–873. [Google Scholar] [CrossRef]
- Dhivyabharathi, B.; Hima, E.S.; Vanajakshi, L. Stream travel time prediction using particle filtering approach. Transp. Lett. Int. J. Transp. Res. 2016, 1–8. [Google Scholar] [CrossRef]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative parallel particle filters for online model selection and applications to urban mobility. Digit. Signal Proc. 2017, 60, 172–185. [Google Scholar] [CrossRef]
- Liebig, T.; Piatkowski, N.; Bockermann, C.; Morik, K. Dynamic route planning with real-time traffic predictions. Inf. Syst. 2017, 64, 258–265. [Google Scholar] [CrossRef]
- Florin, R.; Olariu, S. A survey of vehicular communications for traffic signal optimization. Veh. Commun. 2015, 2, 70–79. [Google Scholar] [CrossRef]
- Bo, W. Estimation of Autoregressive Moving-Average Models via High-Order Autoregressive Approximations. J. Time 2010, 10, 283–299. [Google Scholar] [CrossRef]
- Griffith, D.A.; Heuvelink, G.B.M. Deriving Space-Time Variograms from Space-Time Autoregressive (STAR) Model Specifications. In Proceedings of the StatGIS09: Geo Informatics for Environmental Surveillance, Milos, Greece, 17–19 June 2009; Volume 38, pp. 285–303. [Google Scholar] [CrossRef]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO—Simulation of Urban Mobility: An Overview; SIMUL: Barcelona, Spain, 2011; pp. 63–68. [Google Scholar]
- Haklay, M.; Weber, P. OpenStreetMap: User-Generated Street Maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, J.; Mu, T. Context-Aware and Energy-Driven Route Optimization for Fully Electric Vehicles via Crowdsourcing. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1331–1345. [Google Scholar] [CrossRef]
- Griggs, W.M.; Ordóñez-Hurtado, R.H.; Crisostomi, E.; Häusler, F.; Massow, K.; Shorten, R.N. A Large-Scale SUMO-Based Emulation Platform. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3050–3059. [Google Scholar] [CrossRef]
- Diebold, F.X.; Mariano, R.S. Comparing Predictive Accuracy. J. Bus. Econ. Stat. 1995, 20, 134–144. [Google Scholar] [CrossRef]
- Coreteam, R. R: A language and environment for statistical computing. Computing 2015, 1, 12–21. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Trip Generation Method | Random |
| Trip Possibility Weight | Edge Length |
| New Trip Start Interval | 2 s |
| Fringe Factor | 4 |
| Max Vehicle Number | 300 |
| Traffic Light Duration | OSM Map data |
| Speed Limitation | OSM Map data |
| Simulation Duration | 604,800 s (1 Week) |
| Spatial | First | Second | Third | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Temporal Order | R7-2 | R3-3 | R3-4 | R7-1 | R2-3 | R2-4 | R3-2 | R6-1 | R3-5 | R8-1 | R3-1 | R5-1 | R2-2 | R1-1 | R1-2 |
| 5 | 0.74 | 0.11 | 0.16 | 0.48 | 0.22 | 0.13 | 0.13 | 0.00 | 0.04 | 0.00 | 0.17 | 0.09 | 0.22 | 0.26 | 0.26 |
| 10 | 0.69 | 0.31 | 0.00 | 0.29 | 0.21 | 0.11 | 0.25 | 0.07 | 0.04 | 0.04 | 0.43 | 0.07 | 0.13 | 0.33 | 0.03 |
| 15 | 0.61 | 0.35 | 0.04 | 0.59 | 0.07 | 0.07 | 0.21 | 0.03 | 0.00 | 0.03 | 0.29 | 0.13 | 0.10 | 0.42 | 0.06 |
| 20 | 0.65 | 0.23 | 0.13 | 0.49 | 0.19 | 0.08 | 0.16 | 0.03 | 0.03 | 0.03 | 0.26 | 0.12 | 0.06 | 0.44 | 0.12 |
| 25 | 0.72 | 0.07 | 0.21 | 0.63 | 0.13 | 0.08 | 0.13 | 0.00 | 0.04 | 0.00 | 0.43 | 0.00 | 0.09 | 0.35 | 0.13 |
| 30 | 0.36 | 0.27 | 0.36 | 0.32 | 0.09 | 0.09 | 0.32 | 0.09 | 0.05 | 0.05 | 0.17 | 0.08 | 0.00 | 0.58 | 0.17 |
| 35 | 0.38 | 0.38 | 0.25 | 0.59 | 0.29 | 0.06 | 0.00 | 0.00 | 0.00 | 0.06 | 0.23 | 0.03 | 0.16 | 0.48 | 0.10 |
| 40 | 0.78 | 0.11 | 0.11 | 0.48 | 0.14 | 0.07 | 0.21 | 0.03 | 0.07 | 0.00 | 0.36 | 0.04 | 0.04 | 0.48 | 0.08 |
| 45 | 0.74 | 0.19 | 0.07 | 0.50 | 0.23 | 0.08 | 0.19 | 0.00 | 0.00 | 0.00 | 0.26 | 0.07 | 0.04 | 0.52 | 0.11 |
| 50 | 0.71 | 0.14 | 0.14 | 0.49 | 0.16 | 0.08 | 0.19 | 0.05 | 0.00 | 0.03 | 0.19 | 0.11 | 0.08 | 0.56 | 0.06 |
| 55 | 0.53 | 0.33 | 0.13 | 0.46 | 0.17 | 0.13 | 0.13 | 0.04 | 0.08 | 0.00 | 0.11 | 0.05 | 0.21 | 0.58 | 0.05 |
| 60 | 0.47 | 0.27 | 0.27 | 0.29 | 0.24 | 0.05 | 0.24 | 0.10 | 0.10 | 0.00 | 0.19 | 0.24 | 0.29 | 0.29 | 0.00 |
| 65 | 0.55 | 0.27 | 0.18 | 0.39 | 0.18 | 0.09 | 0.12 | 0.12 | 0.00 | 0.09 | 0.25 | 0.16 | 0.19 | 0.38 | 0.03 |
| 70 | 0.48 | 0.33 | 0.19 | 0.41 | 0.19 | 0.15 | 0.15 | 0.00 | 0.07 | 0.04 | 0.26 | 0.06 | 0.13 | 0.52 | 0.03 |
| 75 | 0.56 | 0.25 | 0.19 | 0.50 | 0.17 | 0.08 | 0.13 | 0.08 | 0.04 | 0.00 | 0.33 | 0.06 | 0.11 | 0.50 | 0.00 |
| 80 | 0.71 | 0.29 | 0.00 | 0.43 | 0.19 | 0.00 | 0.33 | 0.05 | 0.00 | 0.00 | 0.24 | 0.16 | 0.12 | 0.36 | 0.12 |
| 85 | 0.76 | 0.10 | 0.14 | 0.59 | 0.09 | 0.05 | 0.18 | 0.05 | 0.05 | 0.00 | 0.29 | 0.04 | 0.04 | 0.54 | 0.08 |
| 90 | 0.67 | 0.13 | 0.20 | 0.46 | 0.14 | 0.07 | 0.25 | 0.04 | 0.04 | 0.00 | 0.33 | 0.00 | 0.21 | 0.42 | 0.04 |
| 95 | 0.23 | 0.69 | 0.08 | 0.40 | 0.20 | 0.05 | 0.15 | 0.00 | 0.10 | 0.10 | 0.22 | 0.13 | 0.04 | 0.39 | 0.22 |
| 100 | 0.79 | 0.10 | 0.10 | 0.24 | 0.19 | 0.10 | 0.38 | 0.05 | 0.05 | 0.00 | 0.13 | 0.13 | 0.08 | 0.65 | 0.03 |
| Prediction Model | 5 min | 15 min | 30 min |
|---|---|---|---|
| Shift | 0.0000 | 0.0000 | 0.0000 |
| AR | 0.0351 | 0.0225 | 0.0000 |
| Seasonal MA | 0.0611 | 0.0822 | 0.07814 |
| STAR | 0.1023 | 0.0884 | 0.0929 |
| LSTARIMA | 0.8985 | 0.7828 | 0.6797 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Li, D.; Zhang, G.; Zhang, X. Localized Space-Time Autoregressive Parameters Estimation for Traffic Flow Prediction in Urban Road Networks. Appl. Sci. 2018, 8, 277. https://doi.org/10.3390/app8020277
Chen J, Li D, Zhang G, Zhang X. Localized Space-Time Autoregressive Parameters Estimation for Traffic Flow Prediction in Urban Road Networks. Applied Sciences. 2018; 8(2):277. https://doi.org/10.3390/app8020277
Chicago/Turabian StyleChen, Jianbin, Demin Li, Guanglin Zhang, and Xiaolu Zhang. 2018. "Localized Space-Time Autoregressive Parameters Estimation for Traffic Flow Prediction in Urban Road Networks" Applied Sciences 8, no. 2: 277. https://doi.org/10.3390/app8020277
APA StyleChen, J., Li, D., Zhang, G., & Zhang, X. (2018). Localized Space-Time Autoregressive Parameters Estimation for Traffic Flow Prediction in Urban Road Networks. Applied Sciences, 8(2), 277. https://doi.org/10.3390/app8020277