Dissolved Oxygen Control in Activated Sludge Process Using a Neural Network-Based Adaptive PID Algorithm



Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
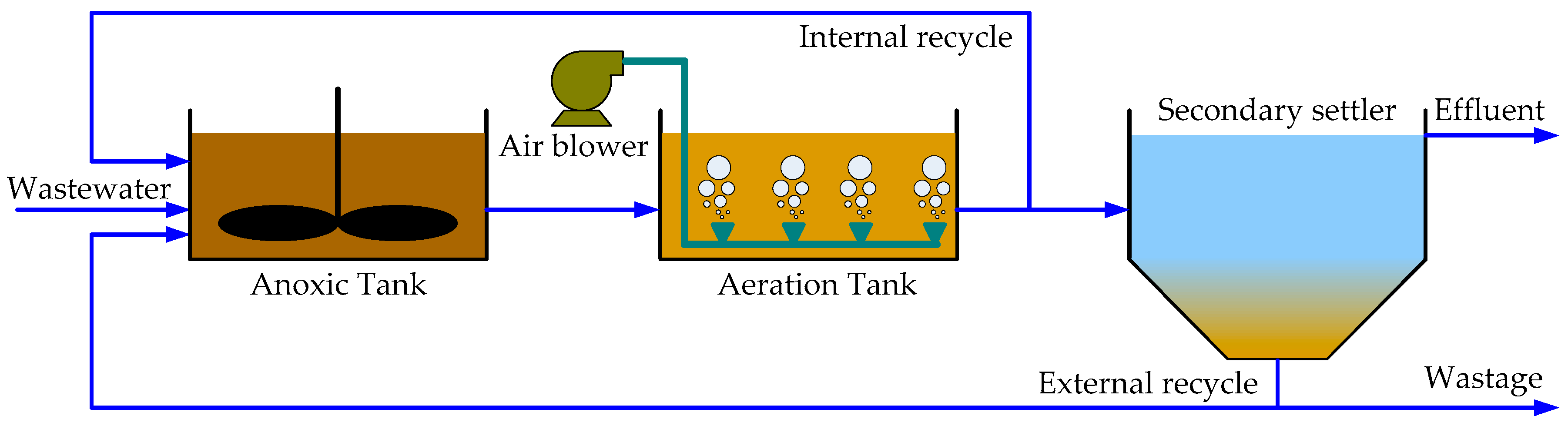
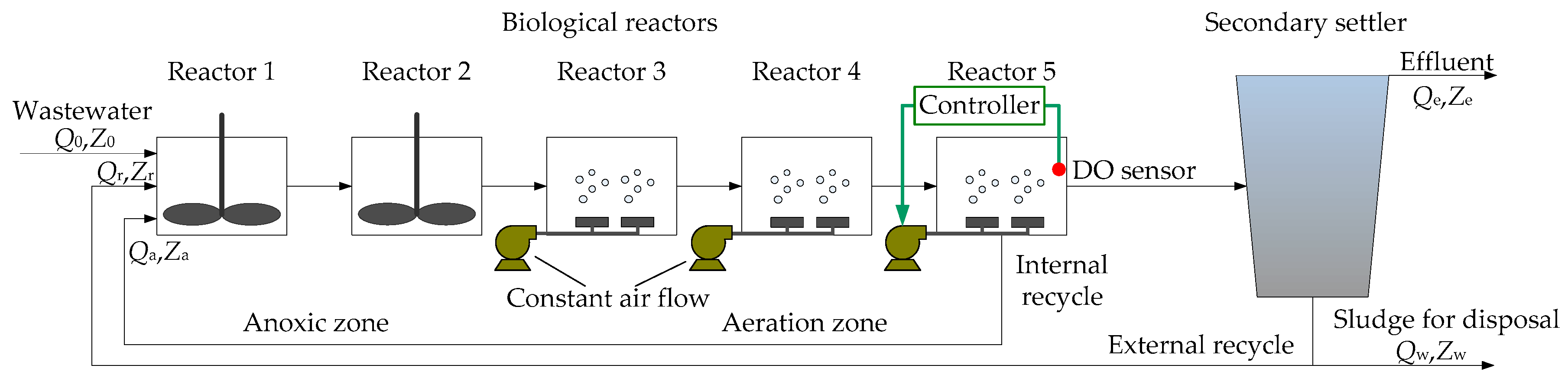
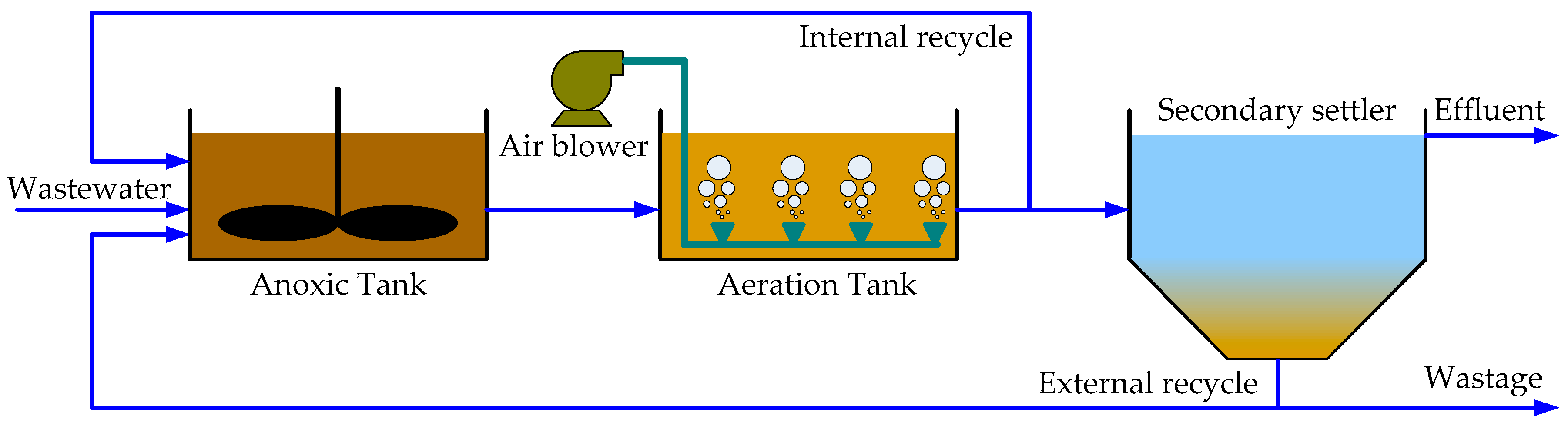
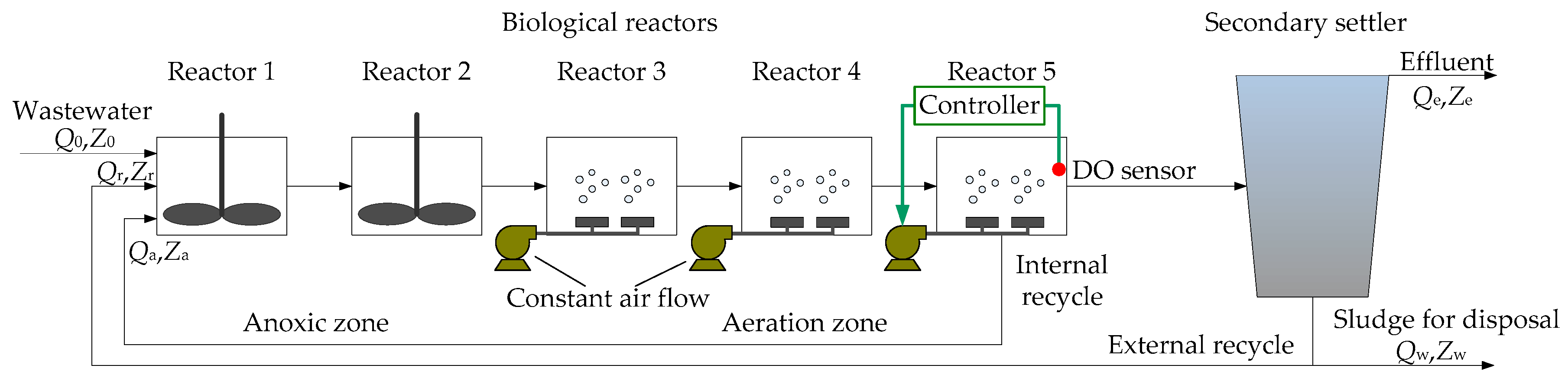
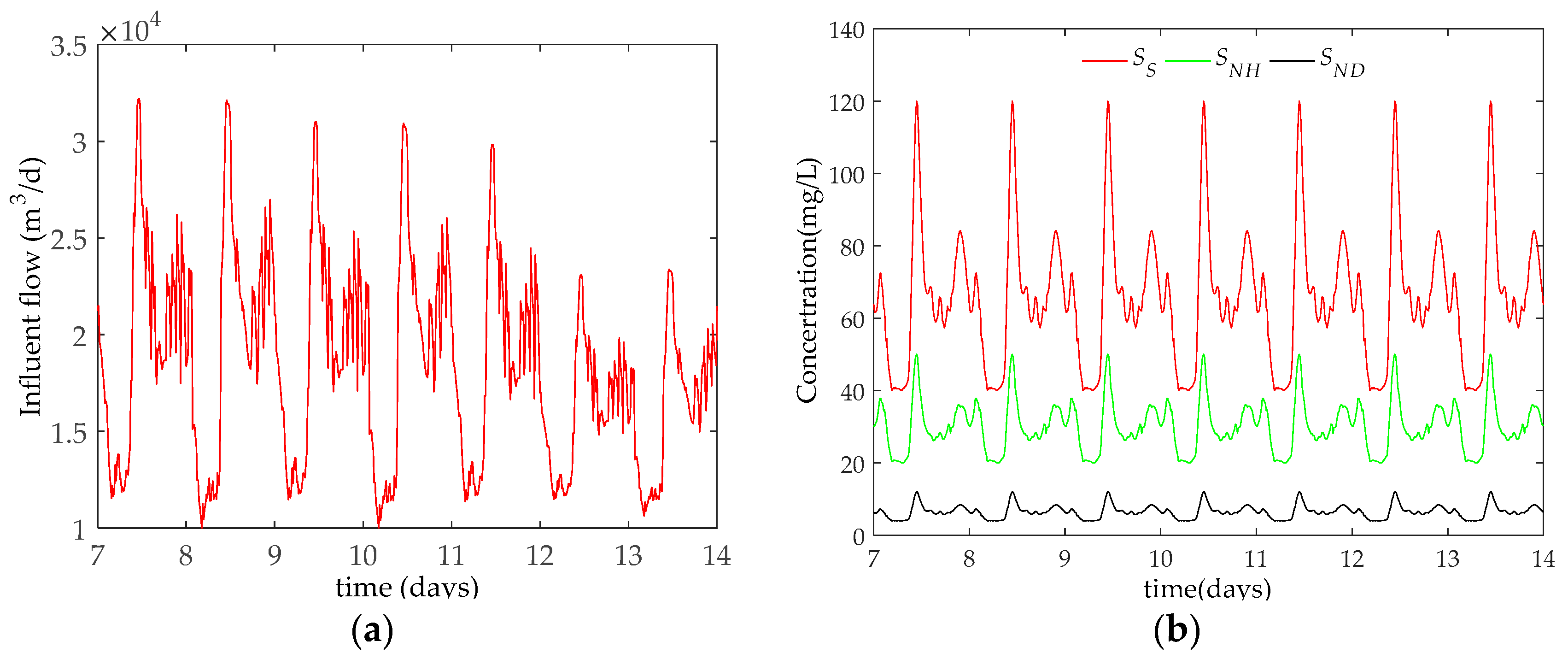
2.1. Activated Sludge Process (ASP) and Benchmark Simulation Model No. 1 (BSM1)
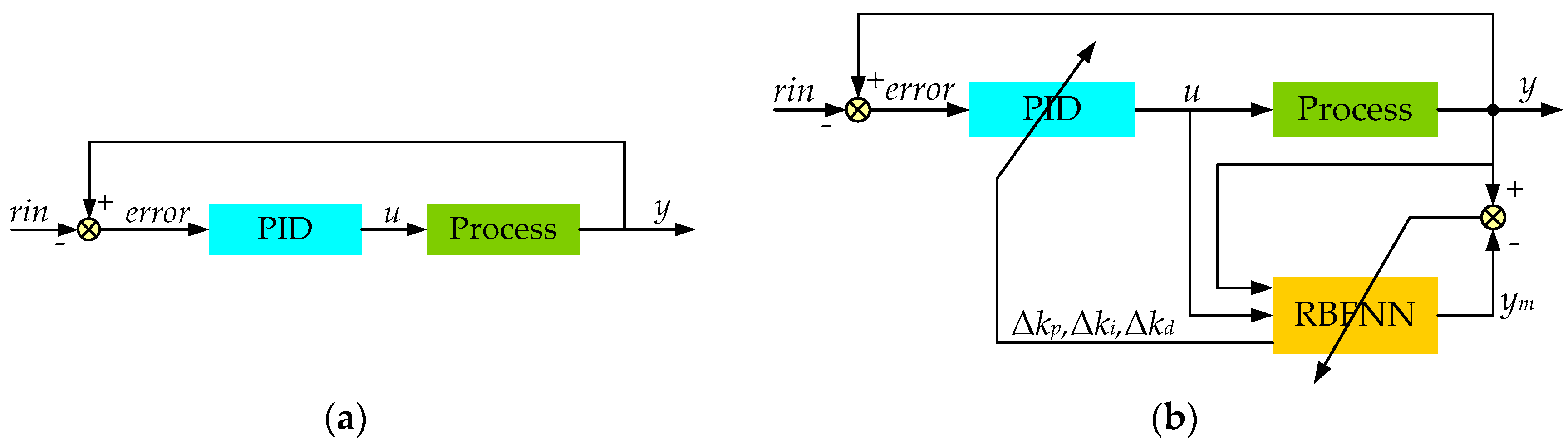
2.2. A Neural Network Based Adaptive PID Algorithm
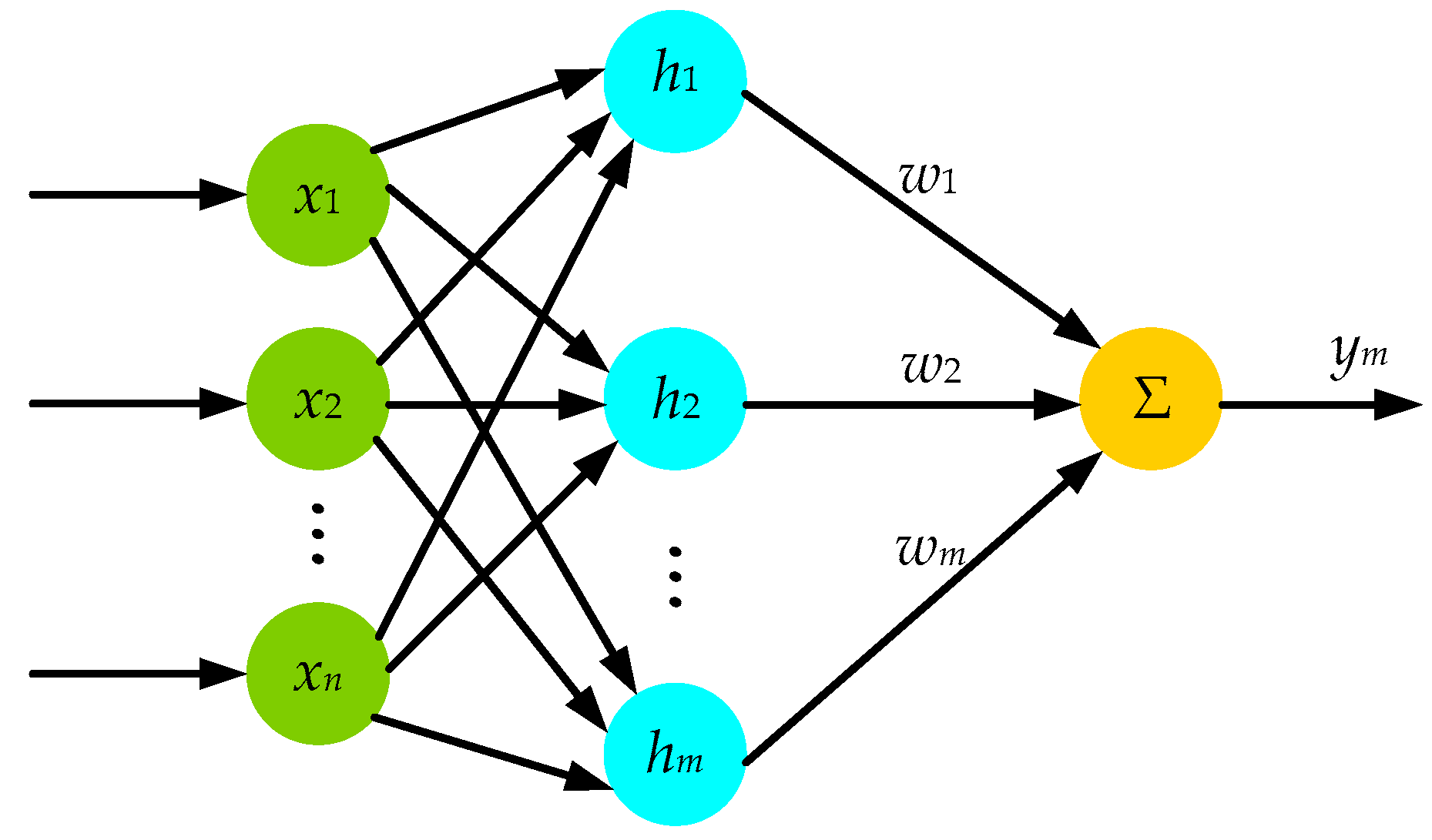
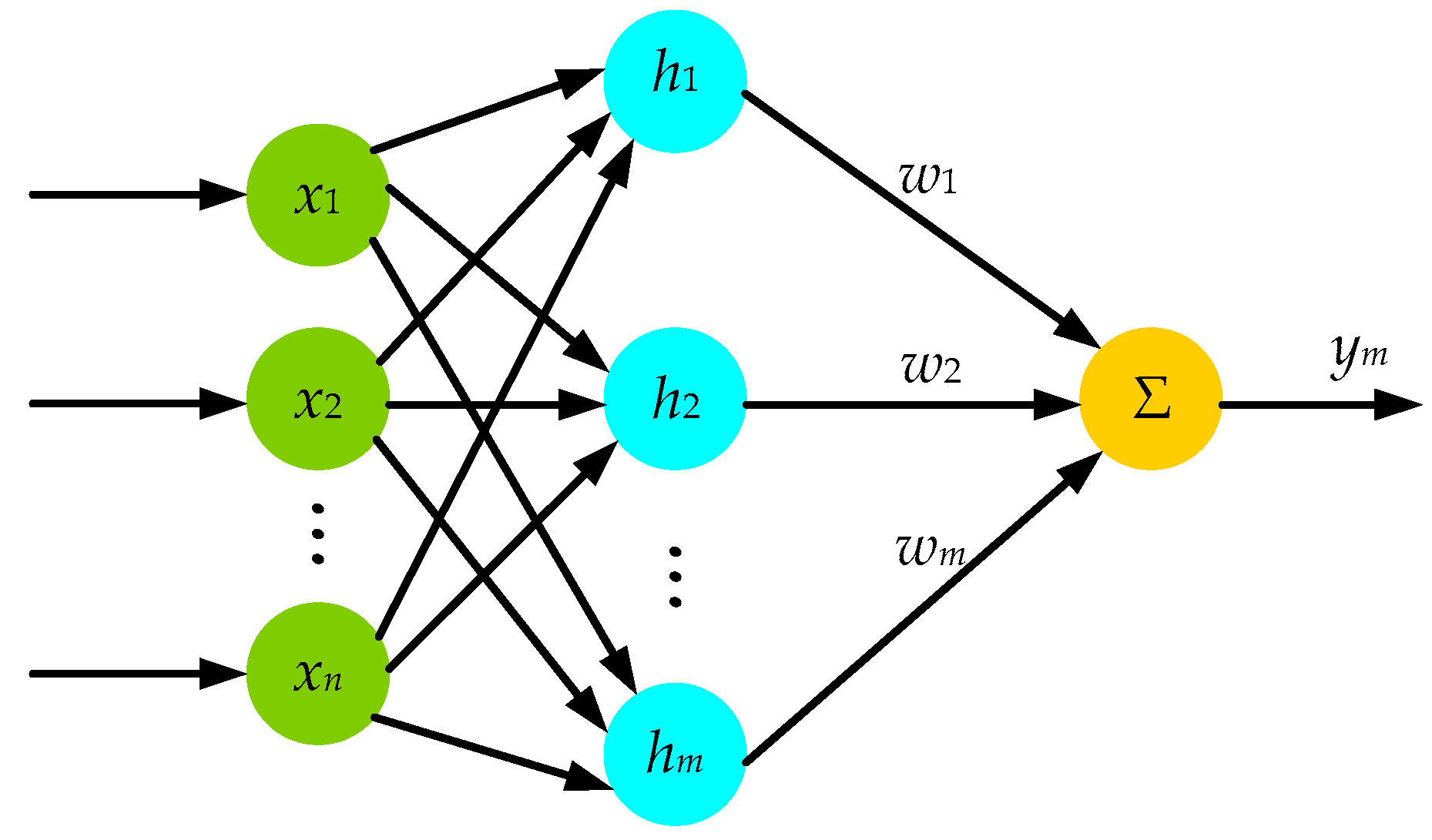
2.2.1. Radial Basis Function (RBF) Neural Network
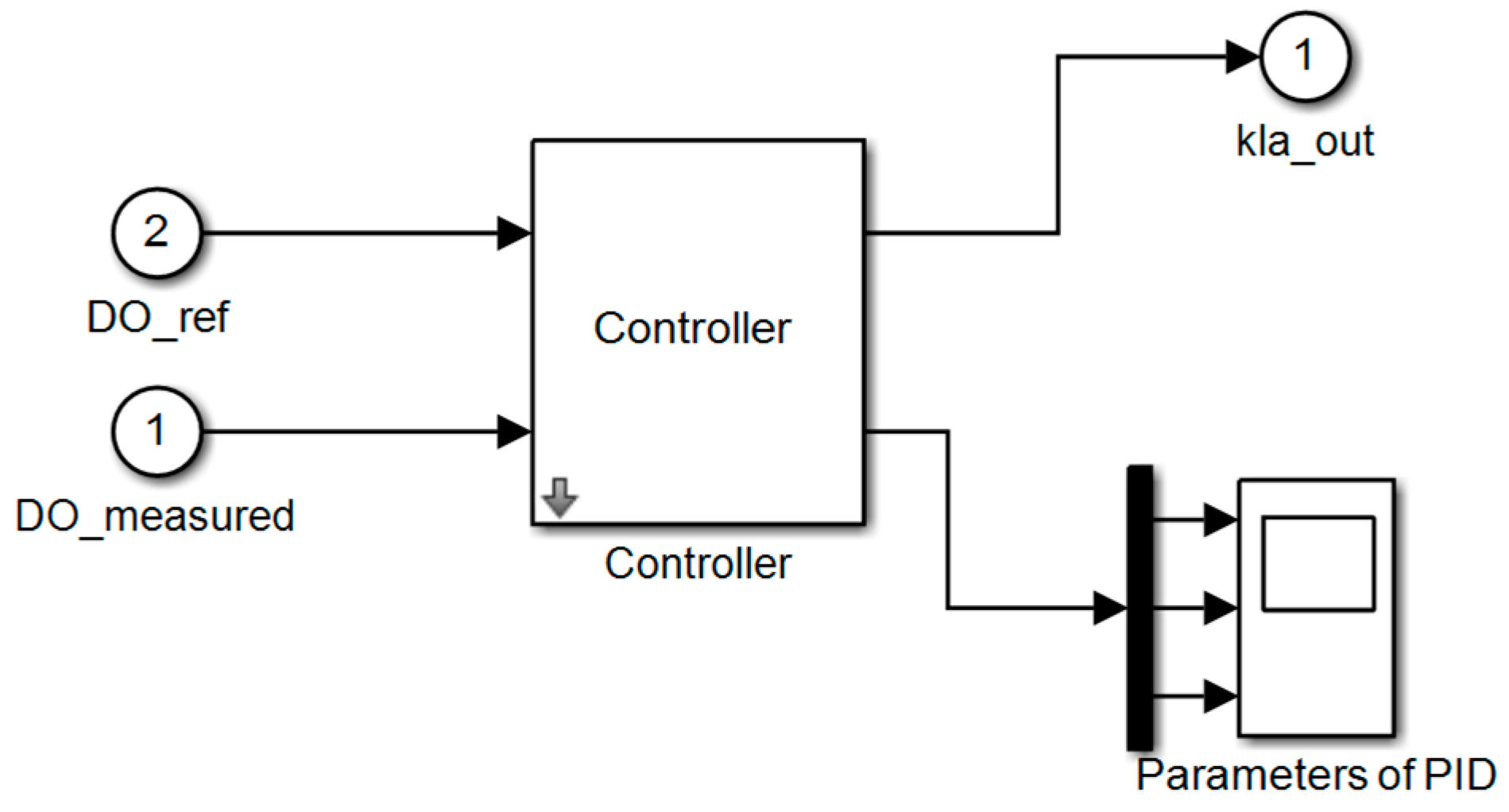
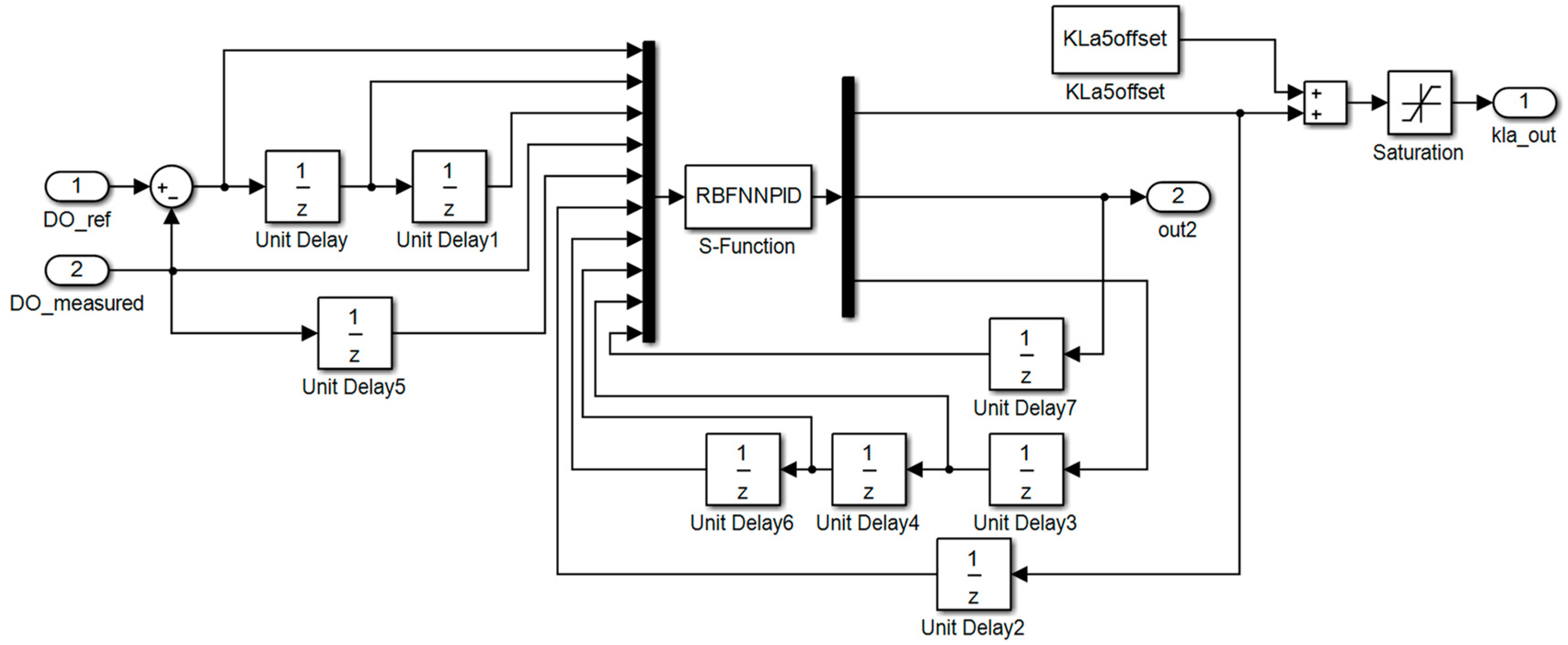
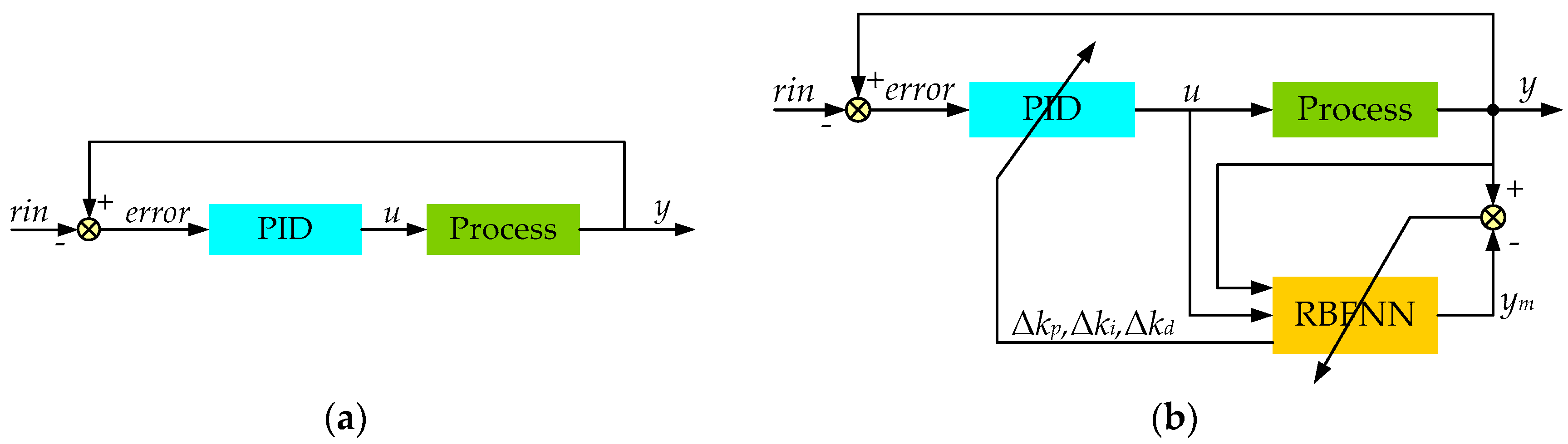
2.2.2. Design of the RBF Neural Network Based Adaptive PID (RBFNNPID) Algorithm
- Step 1:
- Initializing the network parameters, including the number of nodes in input layers and hidden layers, learning rate, inertia coefficient, the base width vector and the weight vector.
- Step 2:
- Sampling to get input rin and output y, calculating error in terms of Equation (18).
- Step 3:
- Calculating the output u of regulator according to Equation (22).
- Step 4:
- Calculating network output ym, adjusting center vector C, base width vector B, weight vector W and the Jacobian matrix in terms of Equations from (10) to (17) to obtain network identification information.
- Step 5:
- Adjusting parameters of regulator in terms of Equations (25)–(27).
- Step 6:
- Back to Step 2 and repeat the subsequent steps until the end of the simulation time.
3. Results
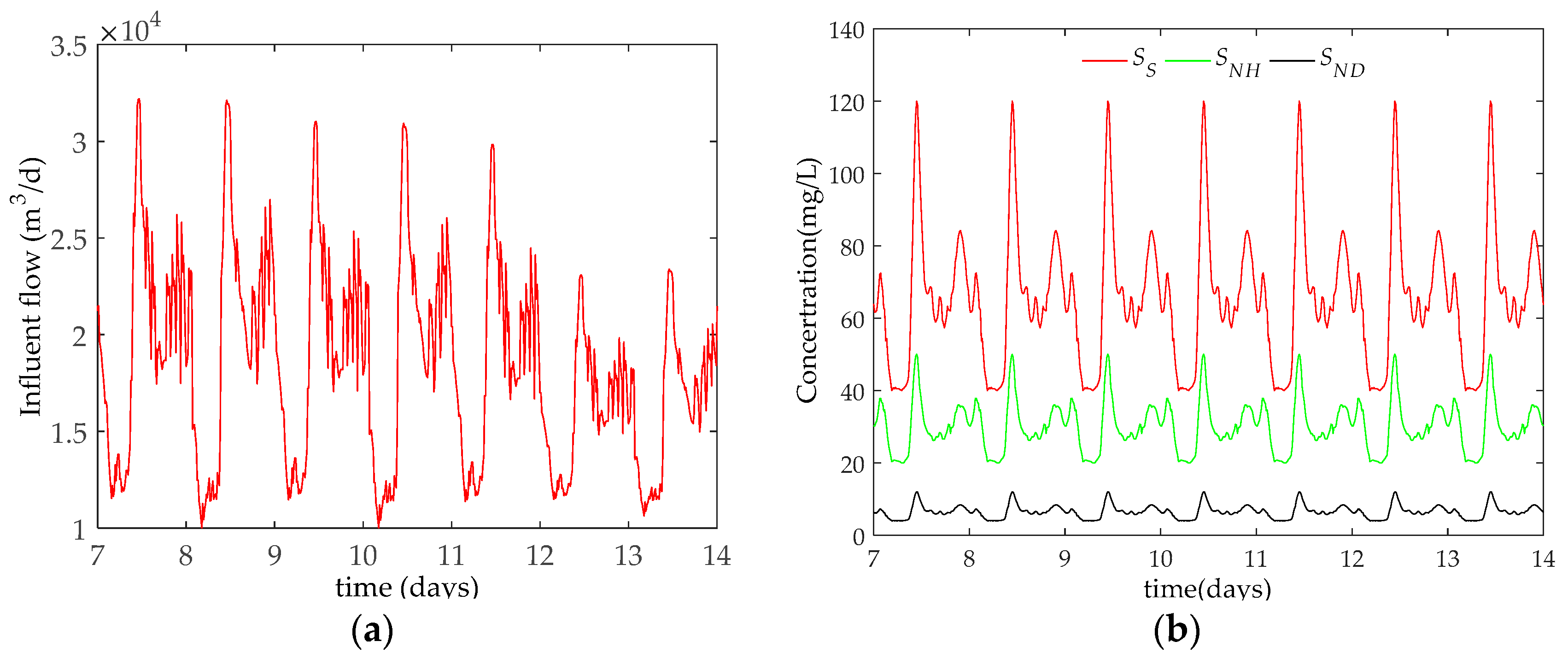
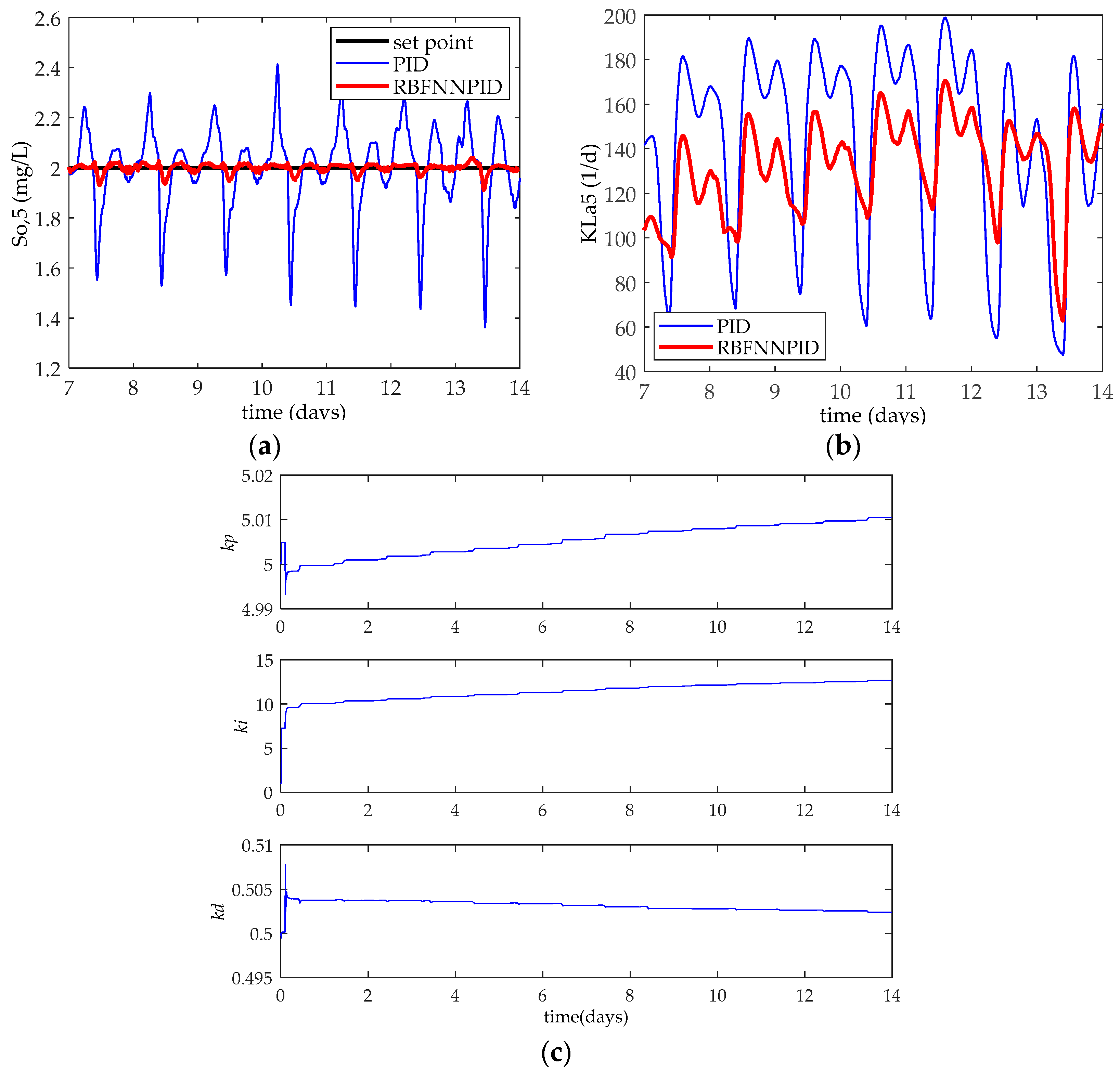
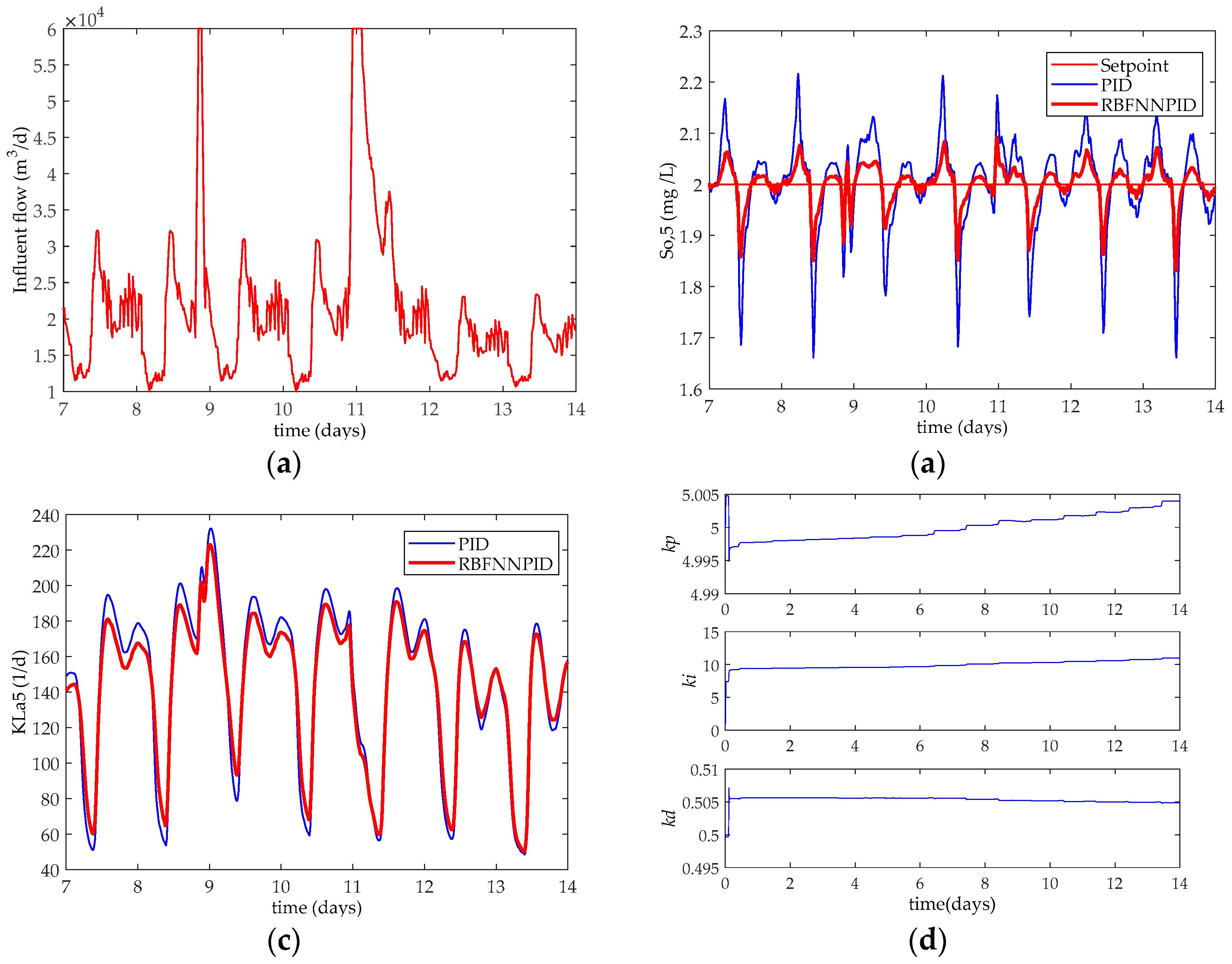
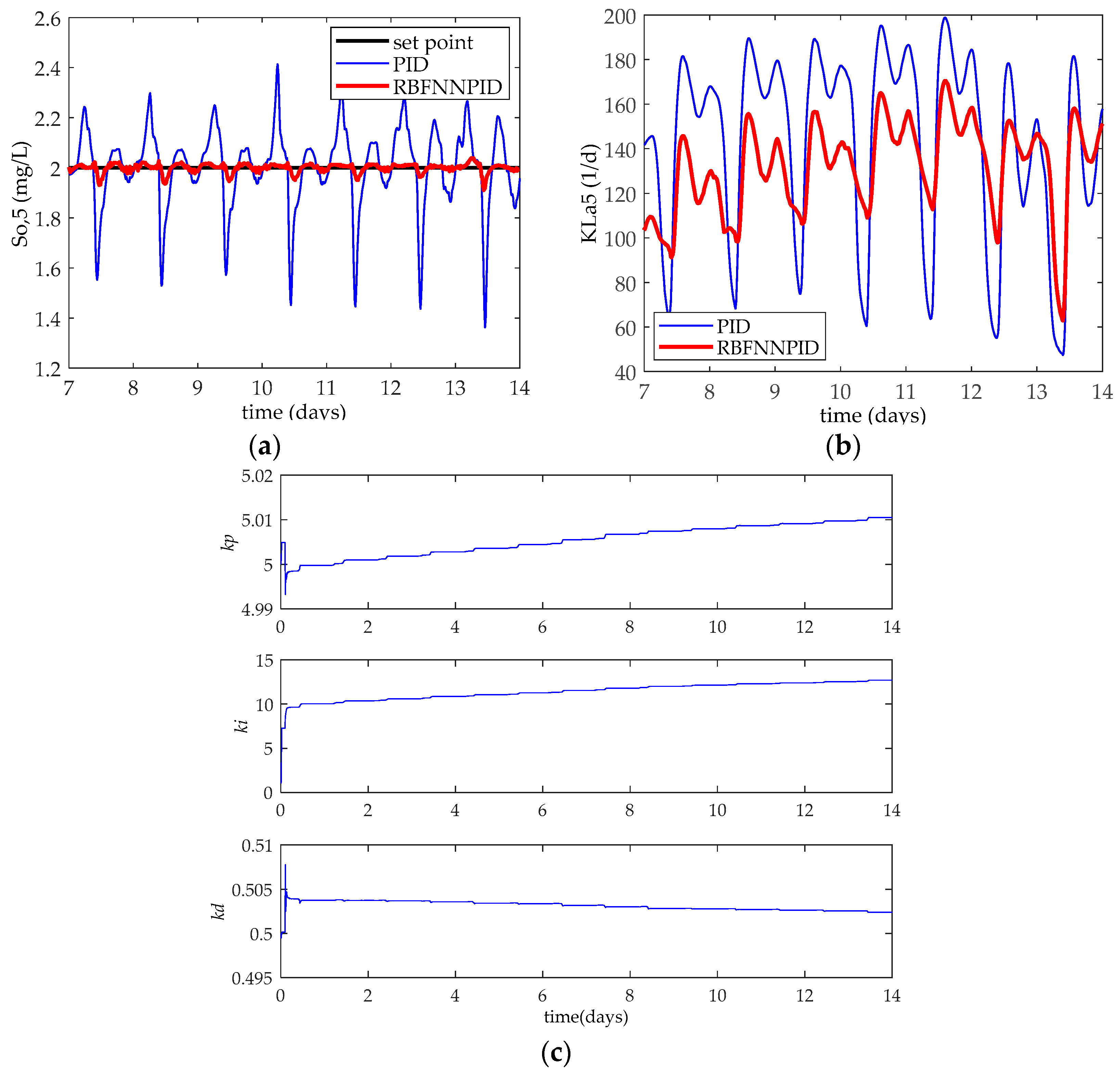
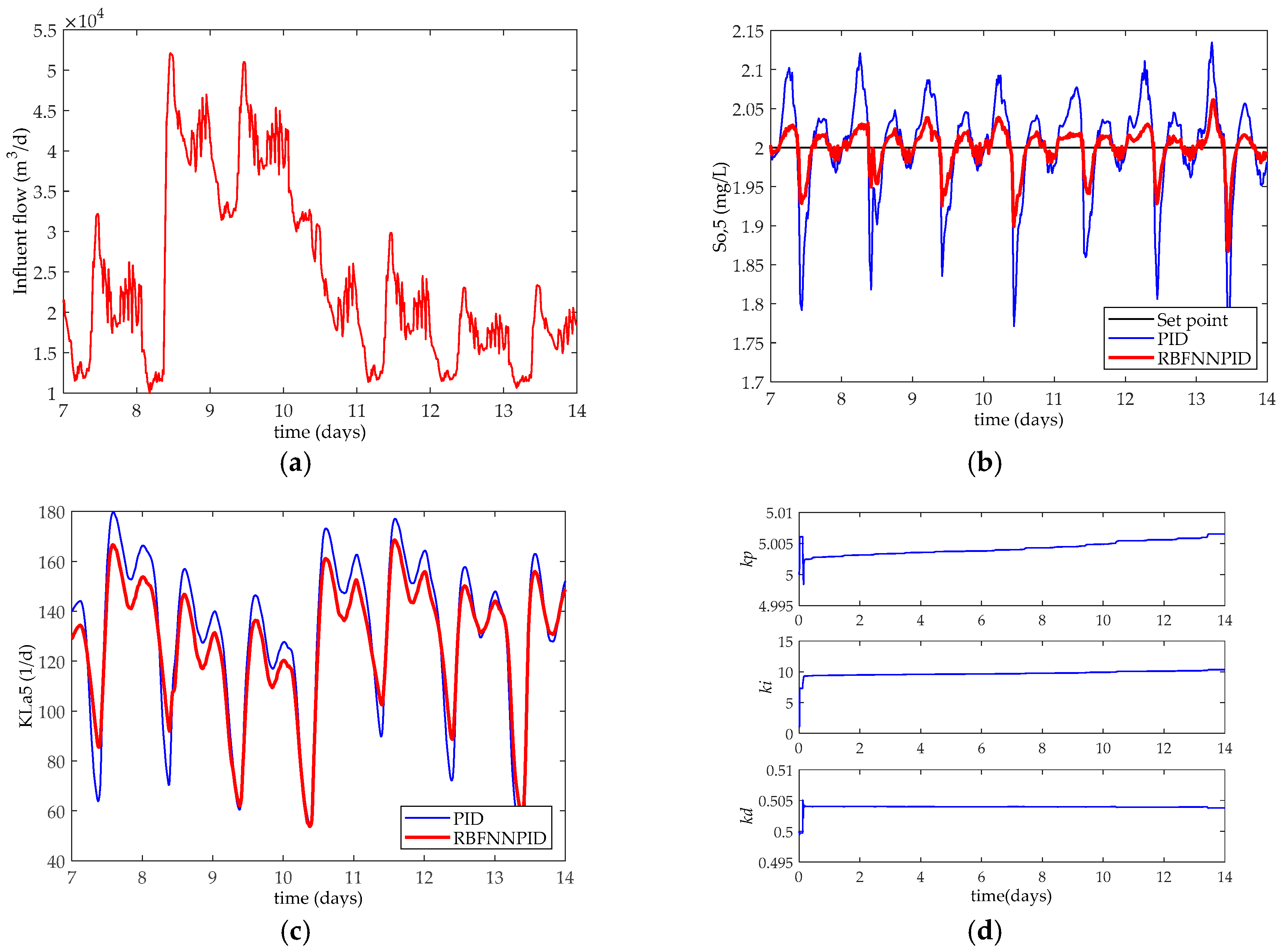
3.1. Tracking Performance Test 1
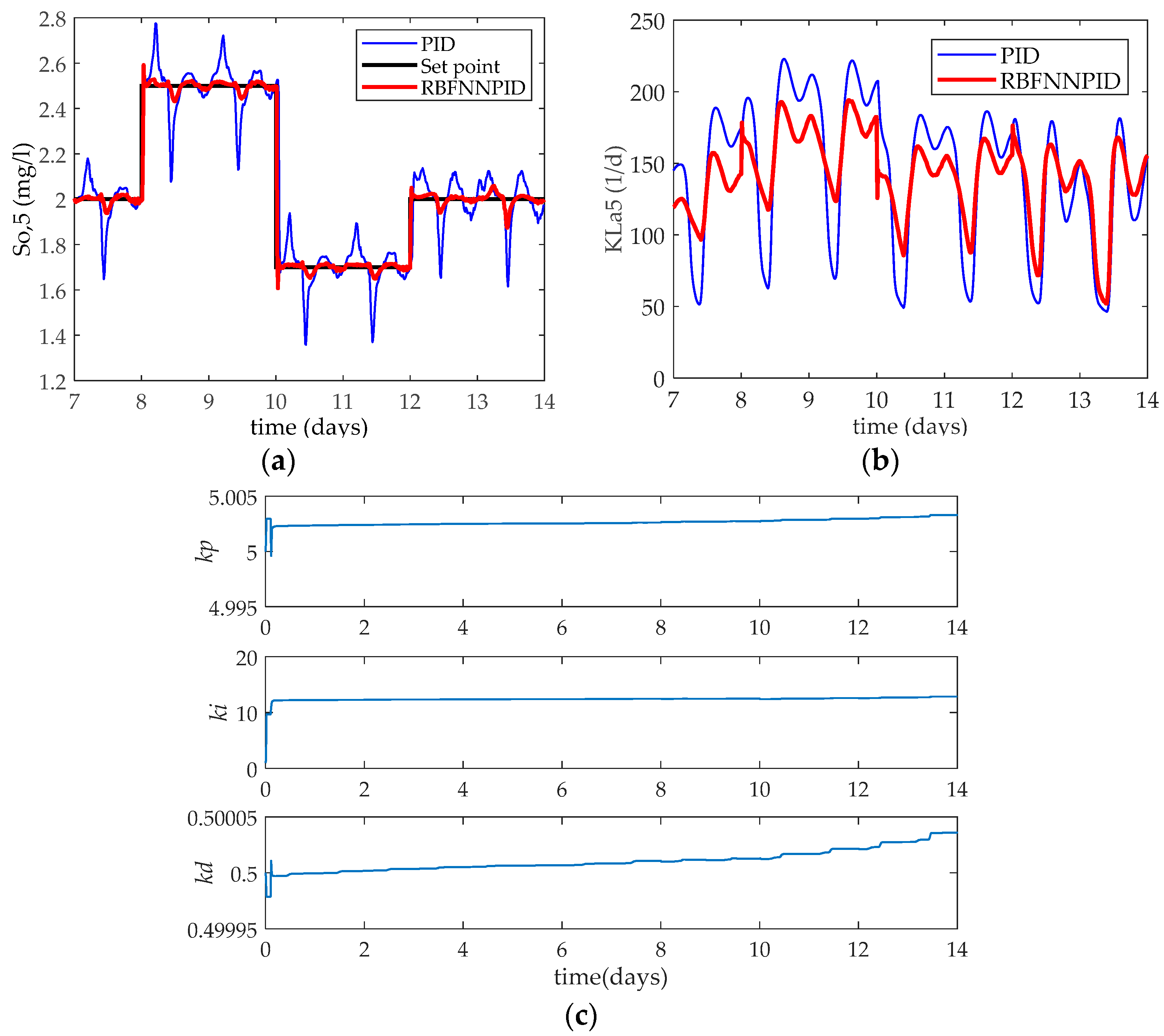
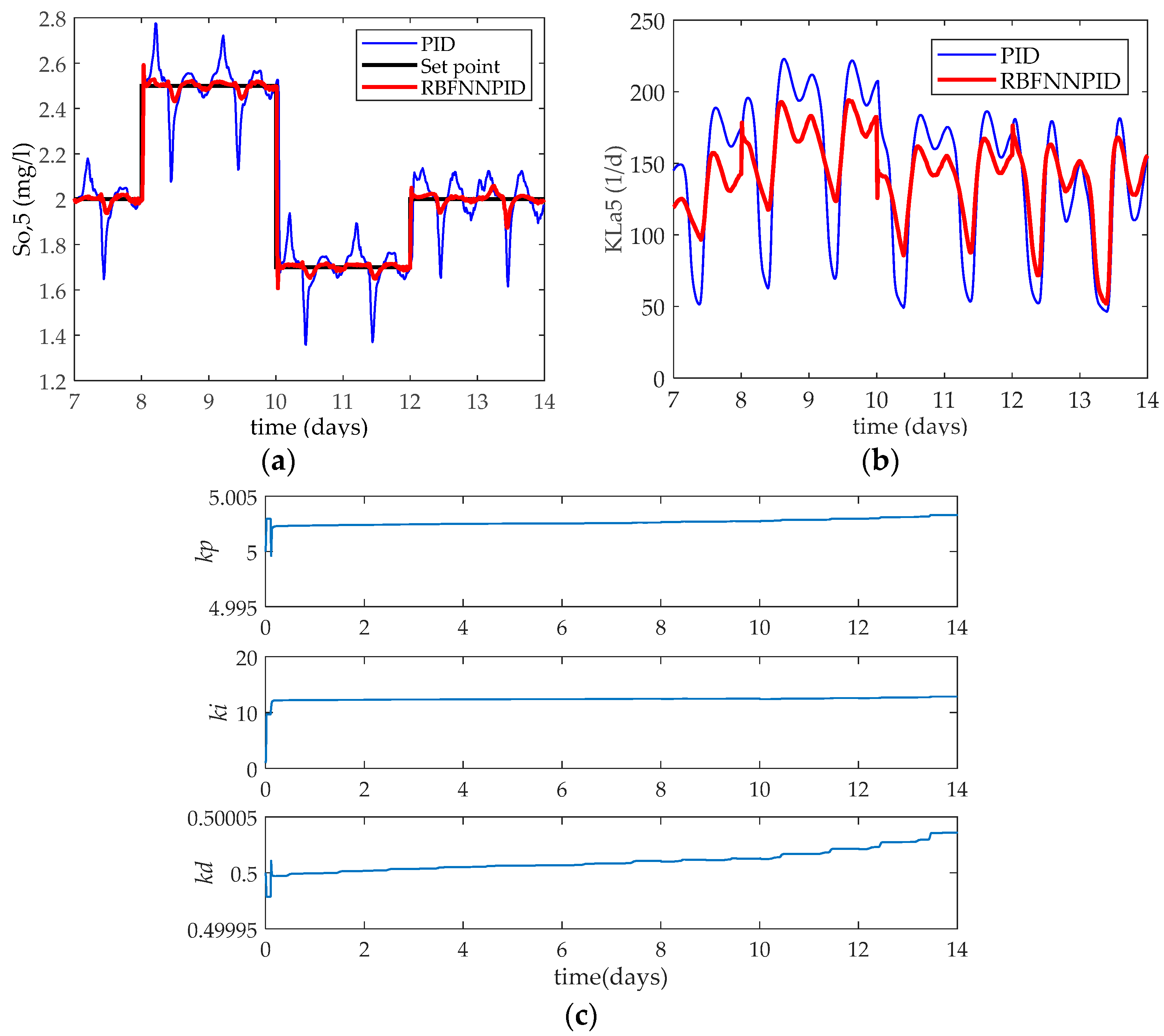
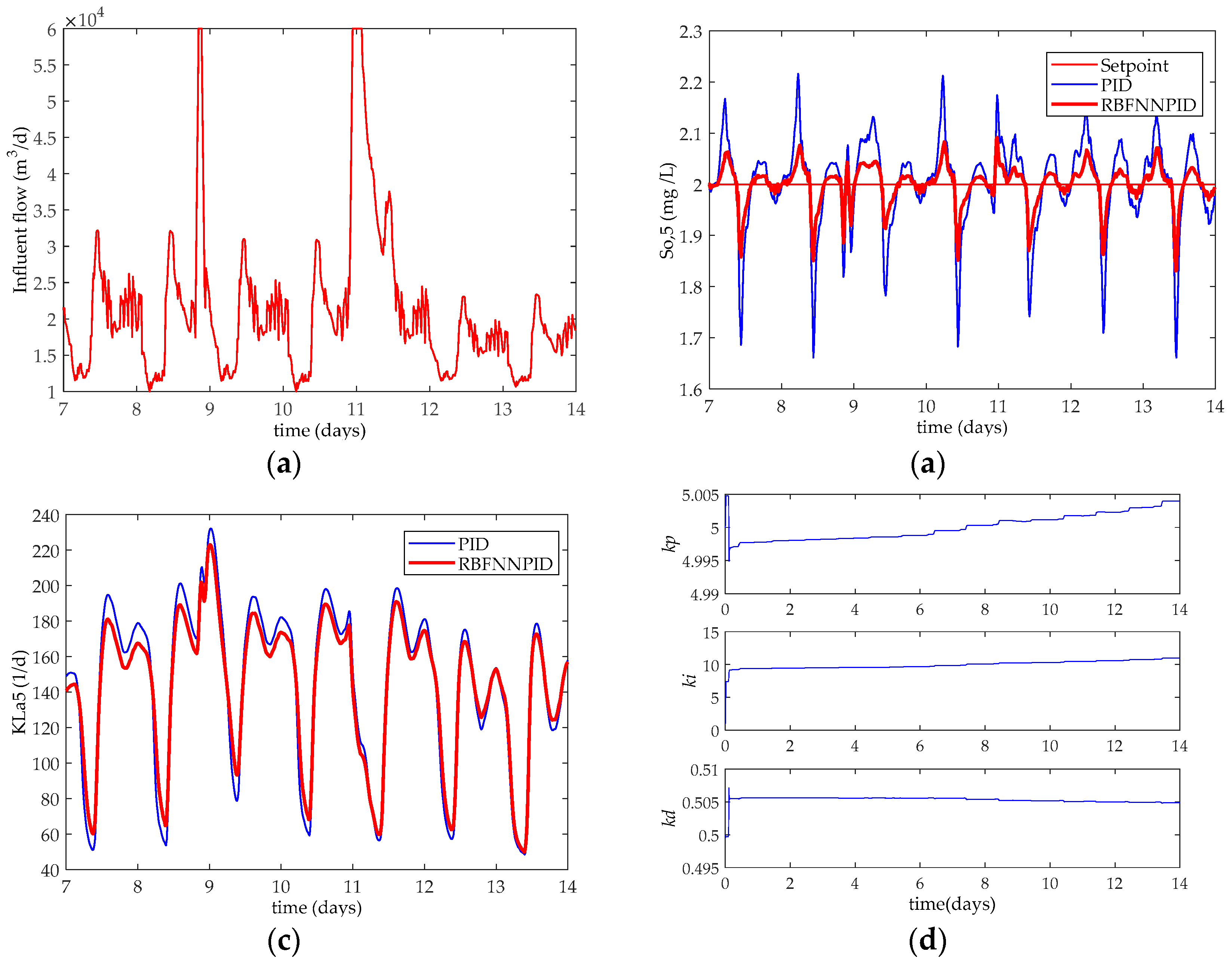
3.2. Tracking Performance Test 2
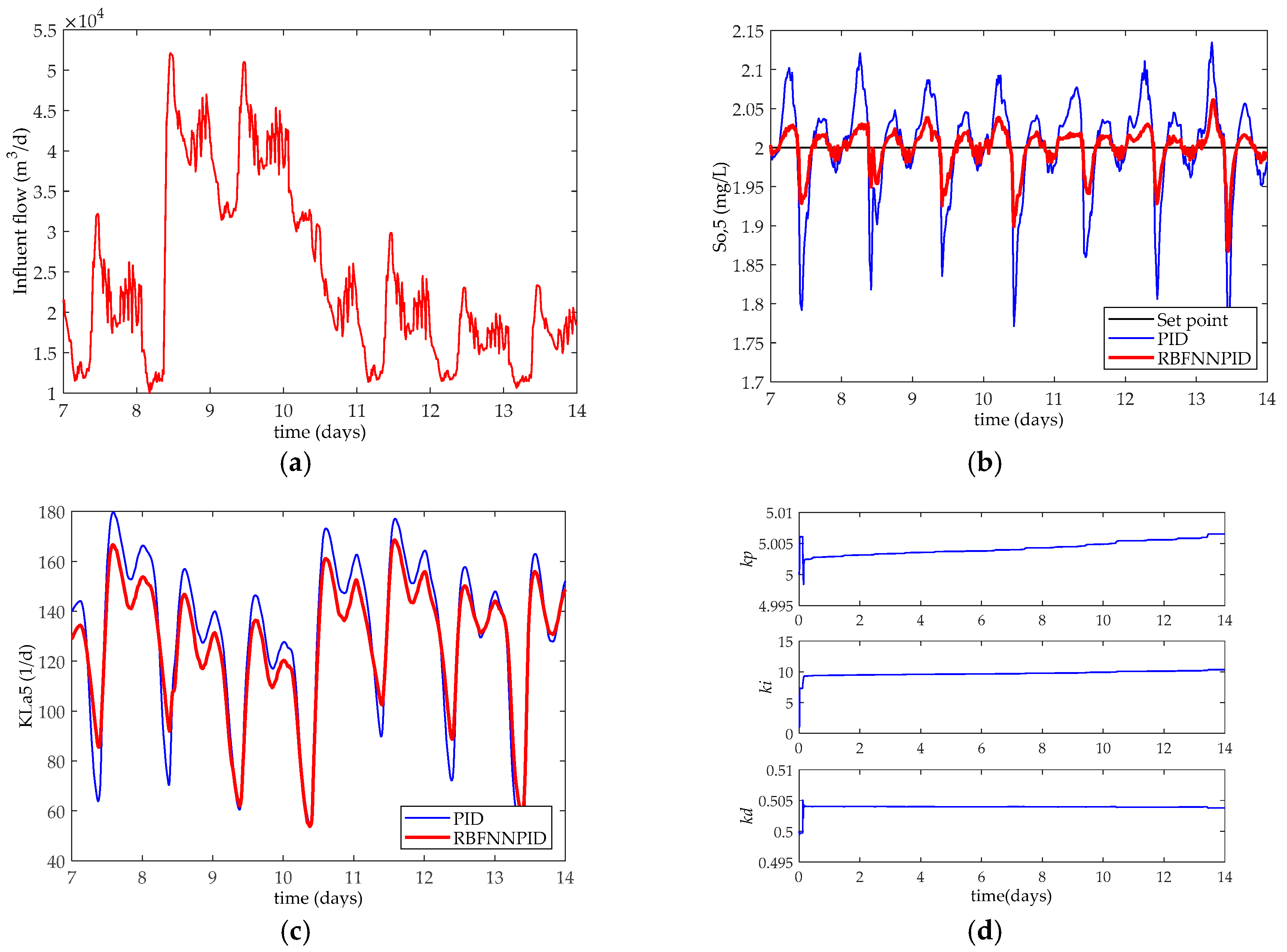
3.3. Anti-Disturbance Performance Test
3.4. Controller Performance Evaluation Index
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
| function [sys, x0, str, ts] = nnrbf_pid(t,x,u,flag,T,nn,K_pid, eta_pid, xite, alfa, beta0, w0) |
| switch flag, |
| case 0, [sys, x0, str, ts] = mdlInitializeSizes(T,nn); |
| case 2, sys = mdlUpdates(u); |
| case 3, sys = mdlOutputs(t, x, u, T,nn, K_pid,eta_pid, xite, alfa, beta0, w0); |
| case {1, 4, 9}, sys = []; |
| otherwise, error (['Unhandled flag = ' , num2str(flag)]); |
| end |
| function [sys,x0,str,ts] = mdlInitializeSizes(T, nn) |
| sizes = simsizes; |
| sizes. NumContStates = 0; |
| sizes.NumDiscStates = 3; |
| sizes. NumOutputs = 4 + 5* nn; |
| sizes.NumInputs = 9 + 15* nn; |
| sizes. DirFeedthrough = 1; |
| sizes. NumSampleTimes =1; |
| sys = simsizes(sizes) ; |
| x0 = zeros(3, 1); |
| str = []; |
| ts = [T0]; |
| function sys = mdlUpdates(u) |
| sys = [ u(1) − u(2); u(1); u(1) + u(3) − 2* u(2)]; |
| function sys = mdlOutputs(t, x, u,T, nn, K_pid, eta_pid, xite, alfa, beta0, w0) |
| % Initialization of the radial basis centers |
| ci3 = reshape(u(7: 6 + 3* nn), 3, nn); |
| ci2 = reshape(u(7 + 5* nn: 6 + 8* nn), 3, nn); |
| ci1 = reshape(u(7 + 10* nn: 6 + 13* nn), 3, nn); |
| % Initialization of the radial basis width |
| bi3 = u(7 + 3* nn: 6 + 4* nn); |
| bi2 = u(7 + 8*nn: 6 + 9* nn); |
| bi1 = u(7 + 13* nn: 6 + 14* nn); |
| % Initialization of the weights |
| w3 = u(7 + 4* nn: 6+ 5* nn) ; |
| w2 = u(7 + 9* nn: 6+ 10* nn) ; |
| w1 = u(7 + 14* nn: 6+ 15* nn) ; |
| xx = u([6; 4; 5]); |
| if t = 0 |
| % Initialize the PID parameters |
| ci1 = w0(1) * ones(3, nn); |
| bi1 = w0(2) *ones(nn, 1); |
| w1 = w0(3) * ones(nn, 1); |
| K_pid0 = K_pid; |
| else |
| % Update the PID parameters |
| K_pid0 = u(end-2: end); |
| end |
| for j = 1: nn |
| % Gaussian |
| h(j, 1) = exp(−norm(xx−ci1( : , j))^2/(2* bi1(j) * bi1(j))); |
| end |
| % Dynamic of gradient descent method |
| dym = u(4) − w1'* h; |
| W = w1 + xite* dym* h + alfa* (w1 − w2) + beta0*(w2 − w3) ; |
| for j = 1: nn |
| dbi(j,1) = xite* dym* w1(j) * h(j) * (bi1(j) ^(−3)) * norm(xx − ci1(:,j))^2; |
| dci( : ,j) = xite*dym* w1(j)* h(j) * (xx − ci1(:,j)) * (bi1(j)^(−2)); |
| end |
| bi = bi1 + dbi + alfa* (bi1 − bi2) + beta0*(bi2 − bi3) ; |
| ci = ci1 + dci + alfa* (ci1 − ci2) + beta0*(ci2 − ci3) ; |
| % Jacobian |
| dJac = sum(w.*h.*(−xx (1) + ci (1,:)') ./bi.^2); |
| % adjustments of the PID parameters |
| KK(1) = K_pid0(1) + u(1) * dJac* eta_pid(1)* x(1); |
| KK(2) = K_pid0(2) + u(1) * dJac* eta_pid(2)* x(2); |
| KK(3) = K_pid0(3) + u(1) * dJac* eta_pid(3)* x(3); |
| sys= [ u(6) + KK* x; KK'; ci( : ) ; bi( : ) ; w( : ) ] ; |
Appendix C
- (i)
- V(x) > 0 is positive definite or V(x) < 0 is negative definite, x ∈ Ω and x ≠ 0;
- (ii)
- V(x) > 0 is positive semi-definite or V(x) < 0 is negative semidefinite, x ∈ Ω;
- (i)
- If V(x) is positive (or negative) definite, and if derivation is negative (or positive) semi-definite, the system is said to be Lyapunov stable at the equilibrium of the origin;
- (ii)
- If V(x) is positive (or negative) definite, and if derivation is negative (or positive) definite, the system is said to be exponentially stable at the equilibrium of the origin;
- (iii)
- If V(x) is positive (or negative) definite, and if derivation is also positive (or negative) definite, the system is said to be unstable at the equilibrium of the origin;
Appendix D
References
- Bo, Y.C.; Zhang, X. Online adaptive dynamic programming based on echo state networks for dissolved oxygen control. Appl. Soft Comput. 2017. [Google Scholar] [CrossRef]
- Holenda, B.; Domokos, E.; Rédey, Á.; Fazakas, J. Dissolved oxygen control of the activated sludge wastewater treatment process using model predictive control. Comput. Chem. Eng. 2008, 32, 1270–1278. [Google Scholar] [CrossRef]
- Zhang, P.; Yuan, M.; Wang, H. Study on Dissolved Oxygen Control Method Based on International Evaluation Benchmark. Inf. Control 2007, 36, 199–203. [Google Scholar]
- Yu, K.; Muhetaer, A.; Wei, L. Evaluation indexes of sewage stabilization from municipal wastewater treatment plant. China Water Wastewater 2016, 5, 93–97. [Google Scholar]
- Chen, C.S. Robust self-organizing neural-fuzzy control with uncertainty observer for MIMO nonlinear systems. IEEE Trans. Fuzzy Syst. 2011, 19, 694–706. [Google Scholar] [CrossRef]
- Nascu, I.; Vlad, G.; Folea, S.; Buzdugan, T. Development and application of a PID auto-tuning method to a wastewater treatment process. In Proceedings of the IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR 2008), Cluj-Napoca, Romania, 22–25 May 2008. [Google Scholar]
- Ye, H.T.; Li, Z.Q.; Luo, W.G. Dissolved oxygen control of the activated sludge wastewater treatment process using adaptive fuzzy PID control. In Proceedings of the 32nd Chinese Control Conference (CCC2013), Xi’an, China, 26–28 July 2013. [Google Scholar]
- Goldar, A.; Revollar, S.; Lamanna, R.; Vega, P. Neural-MPC for N-removal in activated-sludge plants. In Proceedings of the IEEE European Control Conference (ECC 2014), Strasbourg, France, 24–27 June 2014. [Google Scholar]
- Goldar, A.; Revollar, S.; Lamanna, R.; Vega, P. Neural NLMPC schemes for the control of the activated sludge process. In Proceedings of the 11th IFAC Symposium on Dynamics and Control of Process Systems Including Biosystems, Trondheim, Norway, 6–8 June 2016. [Google Scholar]
- Belchior, C.A.C.; Araújo, R.A.M.; Landeck, J.A.C. Dissolved oxygen control of the activated sludge wastewater treatment process using stable adaptive fuzzy control. Comput. Chem. Eng. 2012, 37, 152–162. [Google Scholar] [CrossRef]
- Jeppsson, U.; Rosen, C.; Alex, J.; Copp, J.; Gernaey, K.V.; Pons, M.N.; Vanrolleghem, P.A. Towards a benchmark simulation model for plant-wide control strategy performance evaluation of WWTPs. Water Sci. Technol. 2006, 53, 287–295. [Google Scholar] [CrossRef] [PubMed]
- Yu, G.; Zhang, P.; Wei, S.; Fan, M.; Wang, H. Human-simulation intelligent PID control theory and its application for dissolved oxygen in wastewater treatment. Microcomput. Inf. 2006, 22, 13–15. [Google Scholar]
- Syu, M.J.; Chen, B.C. Back-propagation neural network adaptive control of a continuous wastewater treatment process. Ind. Eng. Chem. Res. 1998, 37, 3625–3630. [Google Scholar] [CrossRef]
- Macnab, C.J.B. Stable Neural-Adaptive Control of Activated Sludge Bioreactors. In Proceedings of the 2014 American Control Conference (ACC2014), Portland, OR, USA, 4–6 June 2014. [Google Scholar]
- Mirghasemi, S.; Macnab, C.J.B.; Chu, A. Dissolved oxygen control of activated sludge bioreactors using neural-adaptive control. In Proceedings of the IEEE Symposium on Computational Intelligence in Control and Automation (CICA 2014), Orlando, FL, USA, 9–12 December 2014. [Google Scholar]
- Ruan, J.; Zhang, C.; Li, Y.; Li, P.; Yang, Z.; Chen, X.; Huang, M.; Zhang, T. Improving the efficiency of dissolved oxygen control using an on-line control system based on a genetic algorithm evolving FWNN software sensor. J. Environ. Manag. 2017, 187, 550–559. [Google Scholar] [CrossRef] [PubMed]
- Qiao, J.; Fu, W.; Han, H. Dissolved oxygen control method based on self-organizing T-S fuzzy neural network. CIESC J. 2016, 67, 960–966. [Google Scholar]
- Li, M.; Zhou, L.; Wang, J. Neural network predictive control for dissolved oxygen based on Levenberg-Marquardt algorithm. Trans. Chin. Soc. Agric. Mach. 2016, 47, 297–302. [Google Scholar]
- Xu, J.; Yang, C.; Qiao, J. A novel dissolve oxygen control method based on fuzzy neural network. In Proceedings of the 36th Chinese Control Conference (CCC2017), Dalian, China, 26–28 July 2017. [Google Scholar]
- Lin, M.J.; Luo, F. Adaptive neural control of the dissolved oxygen concentration in WWTPs based on disturbance observer. Neurocomputing 2016, 185, 133–141. [Google Scholar] [CrossRef]
- Han, H.G.; Qiao, J.F.; Chen, Q.L. Model predictive control of dissolved oxygen concentration based on a self-organizing RBF neural network. Control Eng. Pract. 2012, 20, 465–476. [Google Scholar] [CrossRef]
- Zhou, H. Dissolved oxygen control of wastewater treatment process using self-organizing fuzzy neural network. CIESC J. 2017, 68, 1516–1524. [Google Scholar]
- Huang, M.Z.; Han, W.; Wan, J.Q.; Chen, X. Multi-objective optimization for design and operation of anaerobic digestion using GA-ANN and NSGA-II. J. Chem. Technol. Biotechnol. 2016, 91, 226–233. [Google Scholar] [CrossRef]
- Li, Y.; Li, T.; Jiang, Y.; Fan, J.-L. Adaptive PID control of quadrotor based on RBF neural network. Control Eng. China 2016, 23, 378–382. [Google Scholar]
- Chamsai, T.; Jirawattana, P.; Radpukdee, T. Robust adaptive PID controller for a class of uncertain nonlinear systems: An application for speed tracking control of an SI engine. Math. Probl. Eng. 2015, 17, 1–12. [Google Scholar] [CrossRef]
- Lin, C.M.; Chung, C.C. Fuzzy brain emotional learning control system design for nonlinear systems. Int. J. Fuzzy Syst. 2015, 17, 117–128. [Google Scholar] [CrossRef]
- Henze, M.; Grady, C.P.L.; Gujer, W.; Matsuo, T. Activated Sludge Model No. 1; IAWPRC Publishing: London, UK, 1987. [Google Scholar]
- Gernaey, K.V.; Jeppsson, U.; Vanrolleghem, P.A.; Copp, J.B. Benchmarking of Control Strategies for Wastewater Treatment Plants; IWA Publishing: London, UK, 2014. [Google Scholar]
- Du, X.J.; Hao, X.H.; Li, H.J.; Ma, Y.W. Study on modelling and simulation of wastewater biochemical treatment activated sludge process. Asian J. Chem. 2011, 23, 4457–4460. [Google Scholar]
- Simsek, H. Mathematical modeling of wastewater-derived biodegradable dissolved organic nitrogen. Environ. Technol. 2016, 37, 2879–2889. [Google Scholar] [CrossRef] [PubMed]
- Takács, I.; Patry, G.G.; Nolasco, D. A dynamic model of the clarification thickening process. Water Res. 1991, 25, 1263–1271. [Google Scholar] [CrossRef]
- Olsson, G.; Newell, B. Wastewater Treatment Systems: Modelling, Diagnosis and Control, 1st ed.; IWA Publishing: London, UK, 1999. [Google Scholar]
- Maier, H.R.; Dandy, G.C. Neural networks for the prediction and forecasting of water resources variables: A review of modelling issues and applications. Environ. Model. Softw. 2000, 15, 101–124. [Google Scholar] [CrossRef]
- Wang, J.; Shi, P.; Jiang, P.; Xiao, P. Application of BP Neural Network Algorithm in Traditional Hydrological Model for Flood Forecasting. Water 2017, 9, 48. [Google Scholar] [CrossRef]
- Zebardast, B.; Maleki, I. A New Radial Basis Function Artificial Neural Network based Recognition for Kurdish Manuscript. Int. J. Appl. Evolut. Comput. 2013, 4, 72–87. [Google Scholar] [CrossRef]
- Wahab, N.A.; Katebi, R.; Balderud, J. Multivariable PID control design for activated sludge process with nitrification and denitrification. Biochem. Eng. J. 2009, 45, 239–248. [Google Scholar] [CrossRef]
- Luo, F.; Hoang, B.L.; Tien, D.N.; Nguyen, P.H. Hybrid PI controller design and hedge algebras for control problem of dissolved oxygen in the wastewater treatment system using activated sludge method. Int. Res. J. Eng. Technol. 2015, 2, 733–738. [Google Scholar]
- Sánchezmonedero, M.A.; Aguilar, M.I.; Fenoll, R.; Roig, A. Effect of the aeration system on the levels of airborne microorganisms generated at wastewater treatment plants. Water Res. 2008, 42, 3739–3744. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.H. Influences of Aeration and Biological Treatment on the Fates of Aromatic VOCs in Wastewater Treatment Processes. Aerosol Air Qual. Res. 2013, 13, 225–236. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weather | Method | ISE | IAE | Devmax | Vare |
|---|---|---|---|---|---|
| Dry | RBFNNPID | 1.64× 10−2 | 2.08× 10−1 | 1.89× 10−1 | 2.10× 10−3 |
| PID | 4.44× 10−2 | 4.03× 10−1 | 3.43× 10−1 | 6.30× 10−3 | |
| Rain | RBFNNPID | 2.50× 10−3 | 9.47× 10−2 | 6.94× 10−2 | 3.53× 10−4 |
| PID | 3.59× 10−2 | 3.61× 10−1 | 2.95× 10−1 | 5.10× 10−3 | |
| Storm | RBFNNPID | 5.70× 10−3 | 1.39× 10−1 | 1.46× 10−1 | 8.16× 10−4 |
| PID | 1.38× 10−2 | 2.27× 10−1 | 1.97× 10−1 | 2.00× 10−3 |
| Weather | PID (kWh/d) | RBFNNPID (kWh/d) |
|---|---|---|
| Dry | 7149.9 | 7032.1 |
| Rain | 6955.8 | 6805.8 |
| Storm | 7199.6 | 6971.8 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, X.; Wang, J.; Jegatheesan, V.; Shi, G. Dissolved Oxygen Control in Activated Sludge Process Using a Neural Network-Based Adaptive PID Algorithm. Appl. Sci. 2018, 8, 261. https://doi.org/10.3390/app8020261
Du X, Wang J, Jegatheesan V, Shi G. Dissolved Oxygen Control in Activated Sludge Process Using a Neural Network-Based Adaptive PID Algorithm. Applied Sciences. 2018; 8(2):261. https://doi.org/10.3390/app8020261
Chicago/Turabian StyleDu, Xianjun, Junlu Wang, Veeriah Jegatheesan, and Guohua Shi. 2018. "Dissolved Oxygen Control in Activated Sludge Process Using a Neural Network-Based Adaptive PID Algorithm" Applied Sciences 8, no. 2: 261. https://doi.org/10.3390/app8020261
APA StyleDu, X., Wang, J., Jegatheesan, V., & Shi, G. (2018). Dissolved Oxygen Control in Activated Sludge Process Using a Neural Network-Based Adaptive PID Algorithm. Applied Sciences, 8(2), 261. https://doi.org/10.3390/app8020261