Hybrid Locomotion Evaluation for a Novel Amphibious Spherical Robot

 ,
, 
 ,
,
Abstract
:1. Introduction
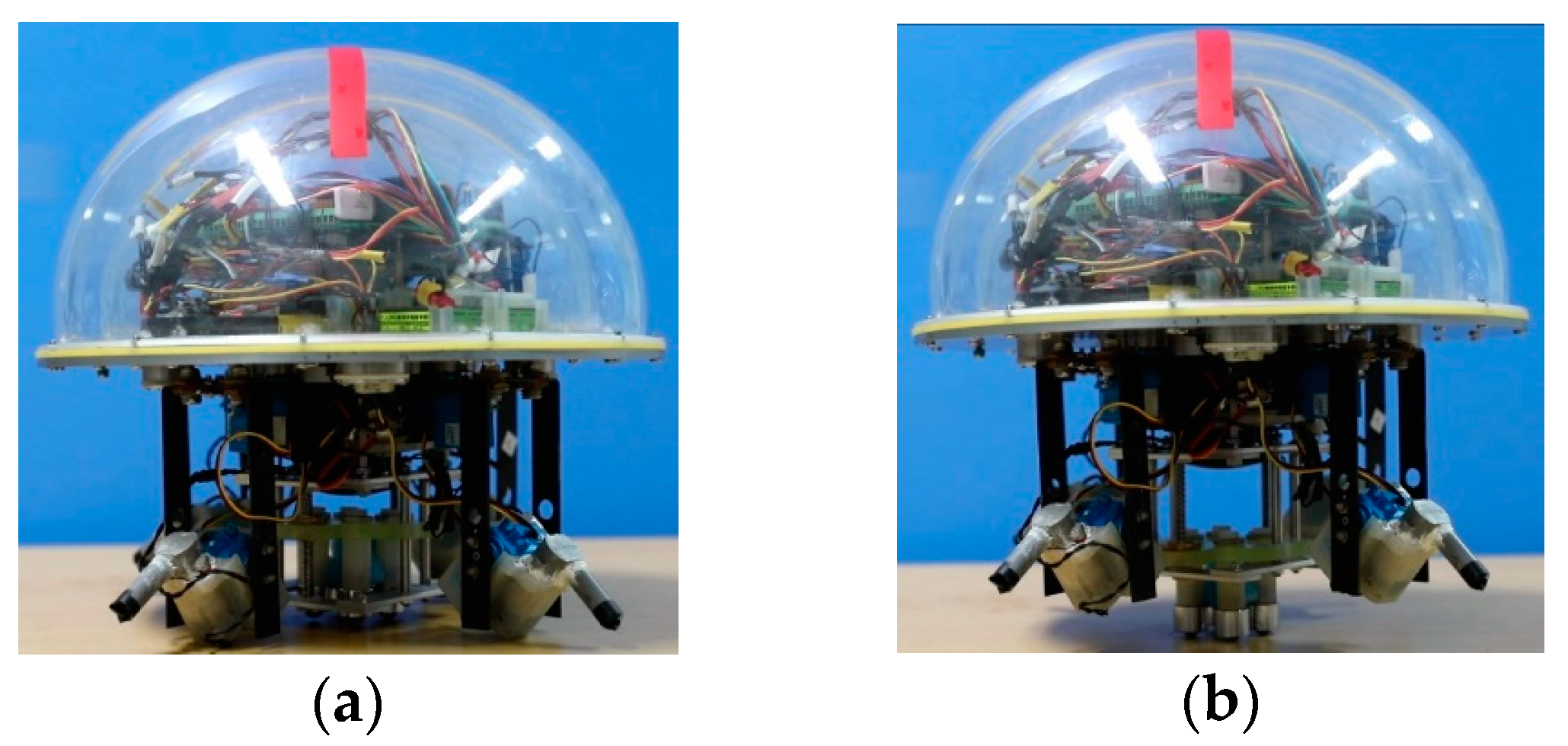
2. The Amphibious Spherical Robot (ASR) III
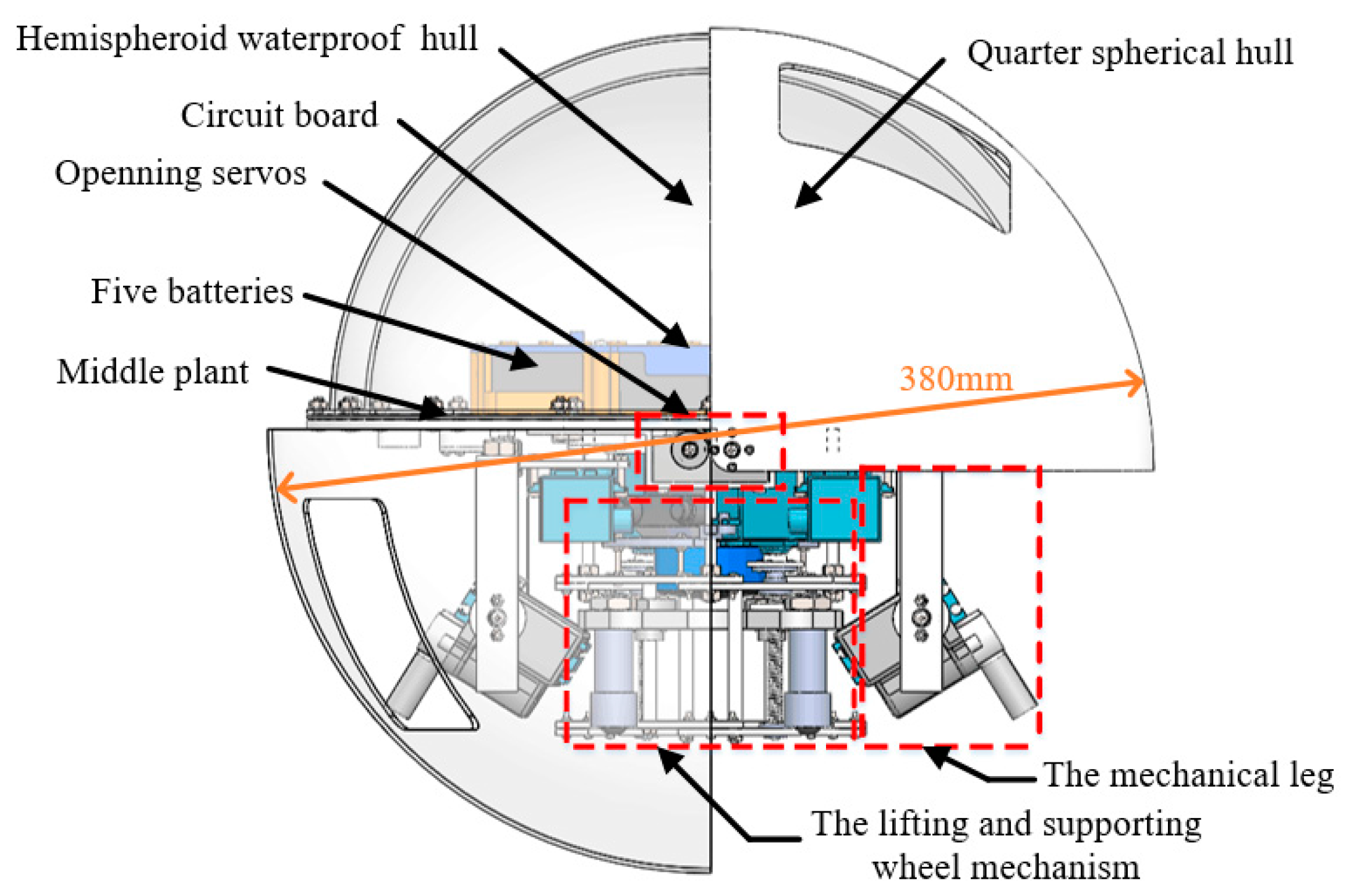
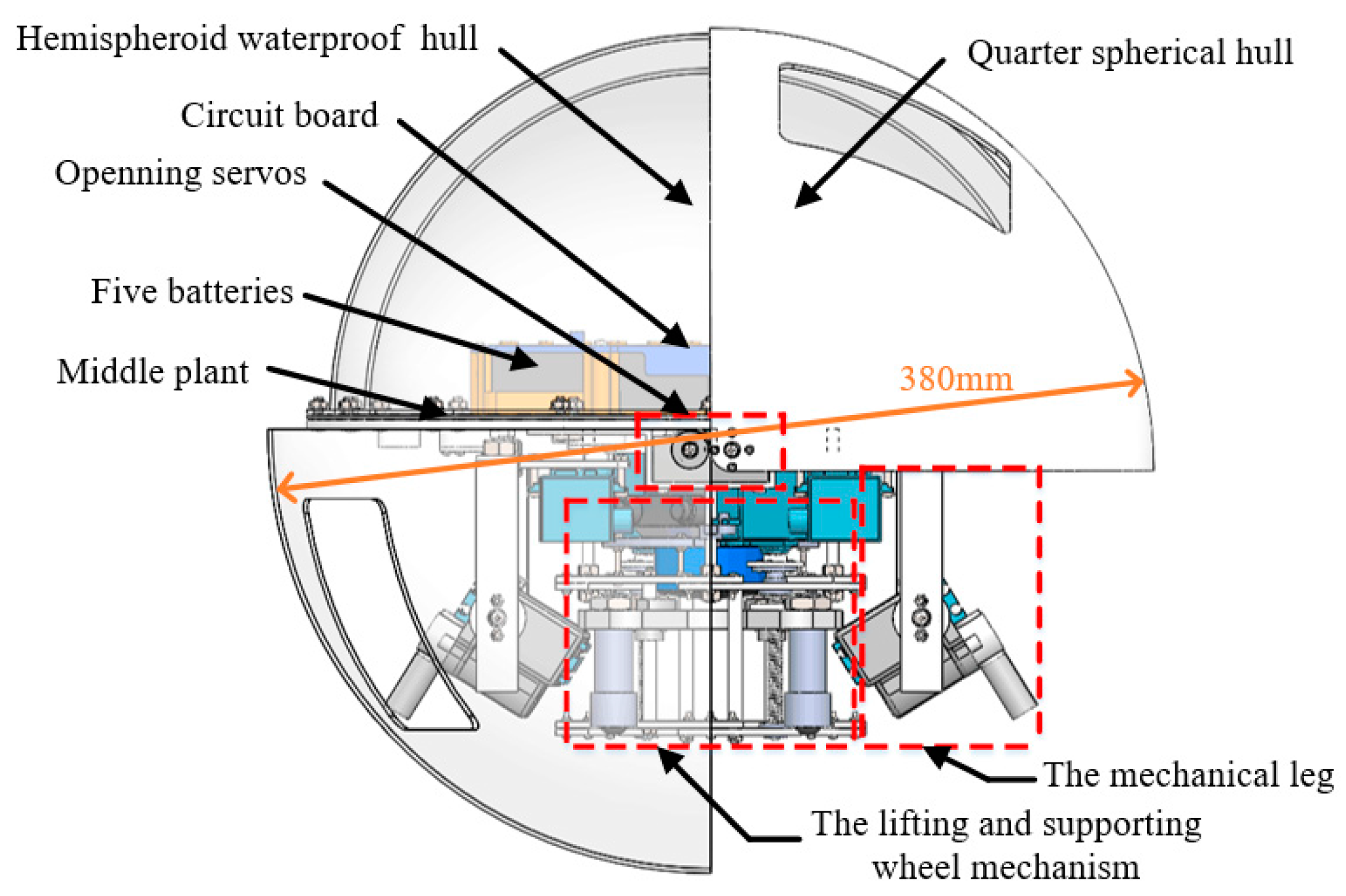
2.1. The Mechanism
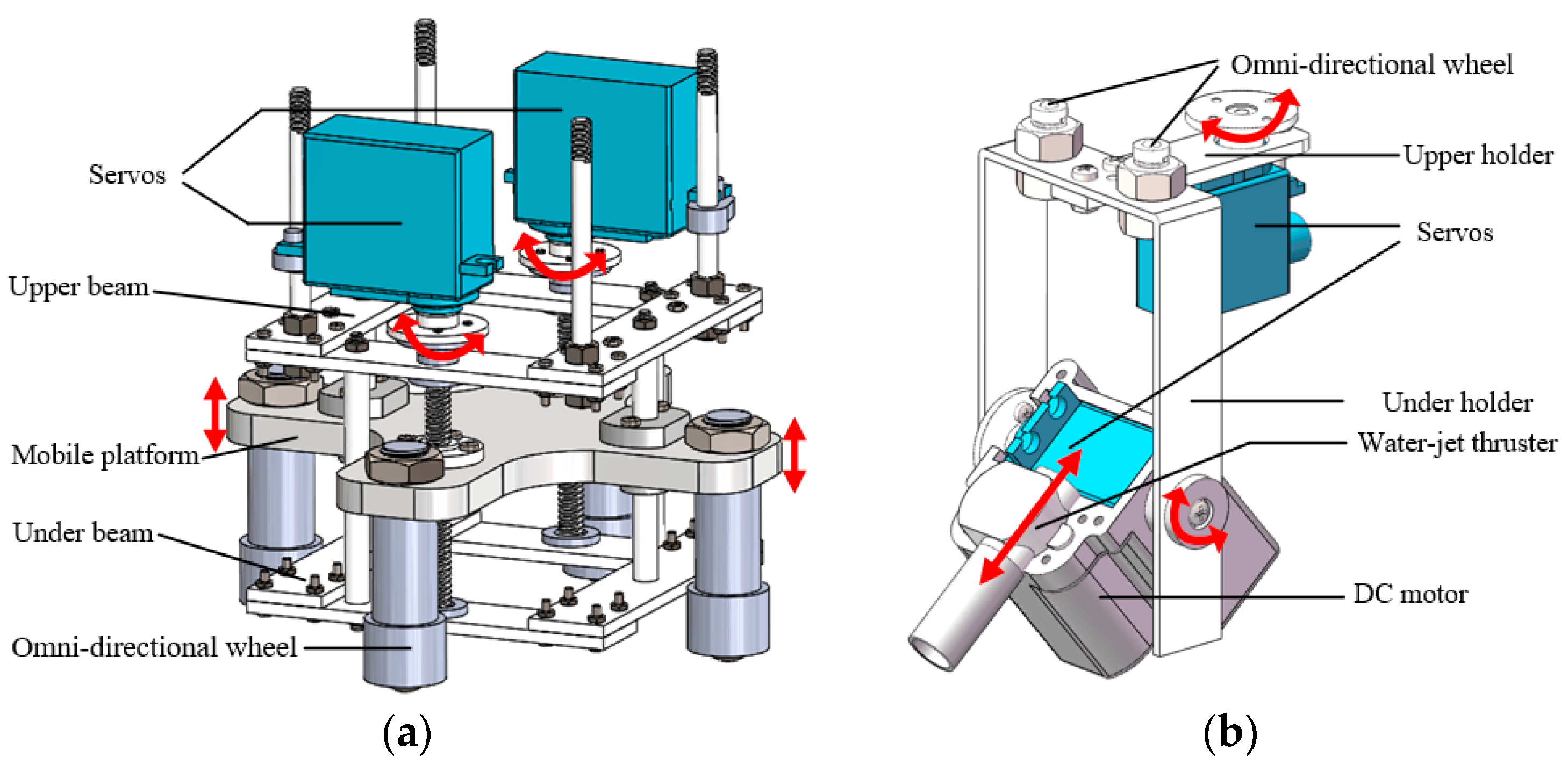
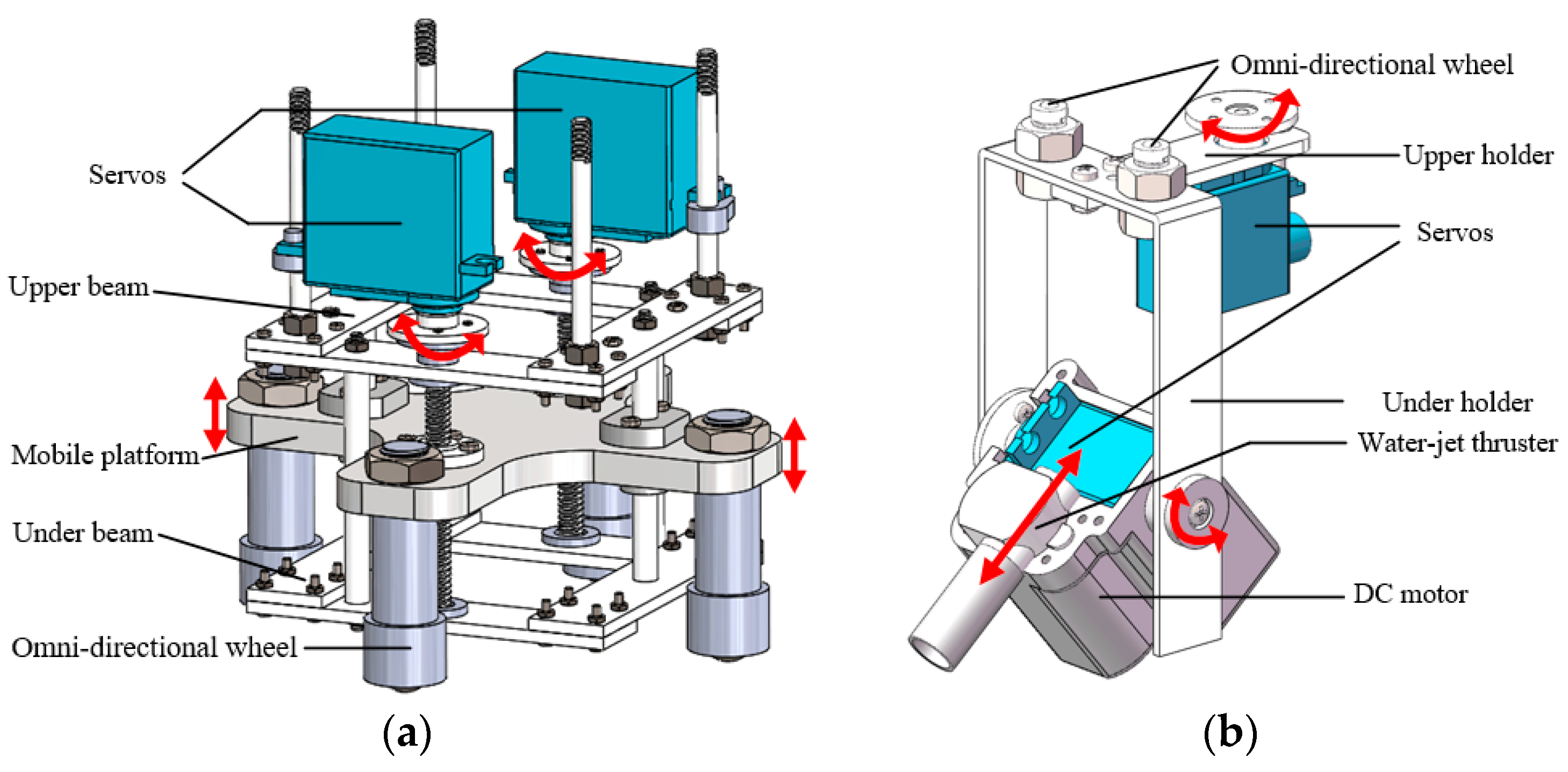
2.2. The Wheel Legged Water-Jet Composite Driving Mechanism
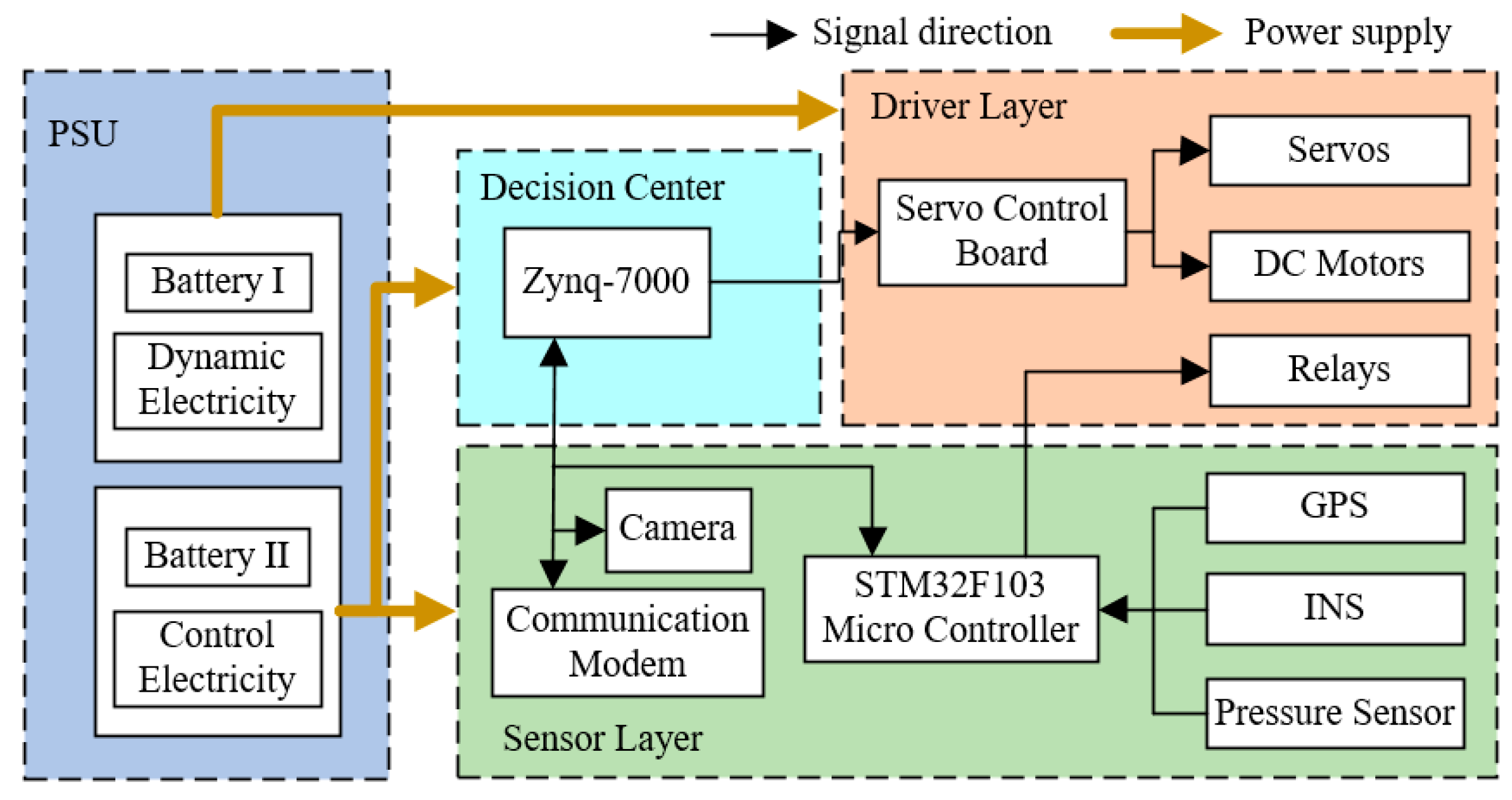
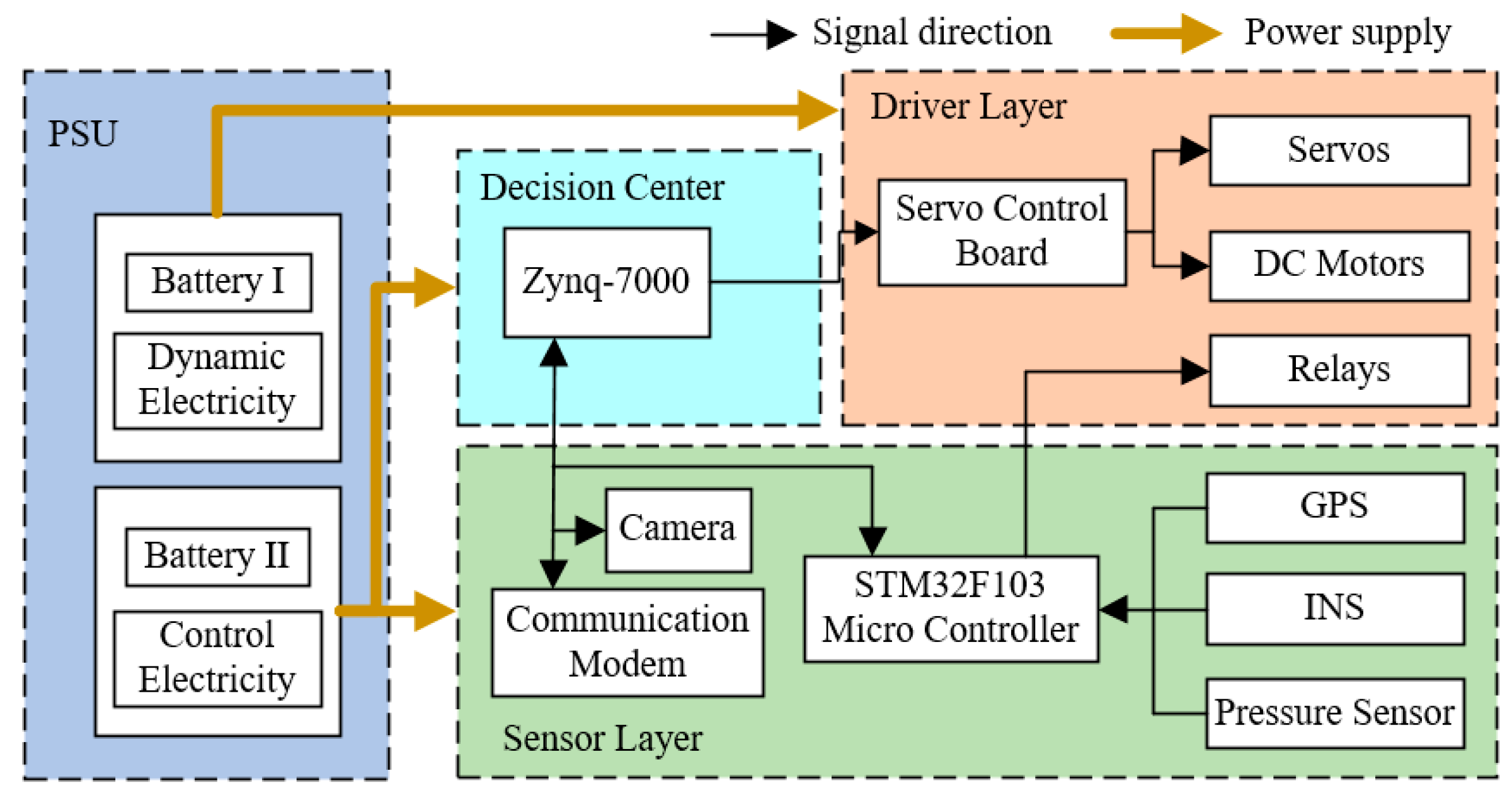
2.3. The Electrical Circuit
3. The Hybrid Locomotion
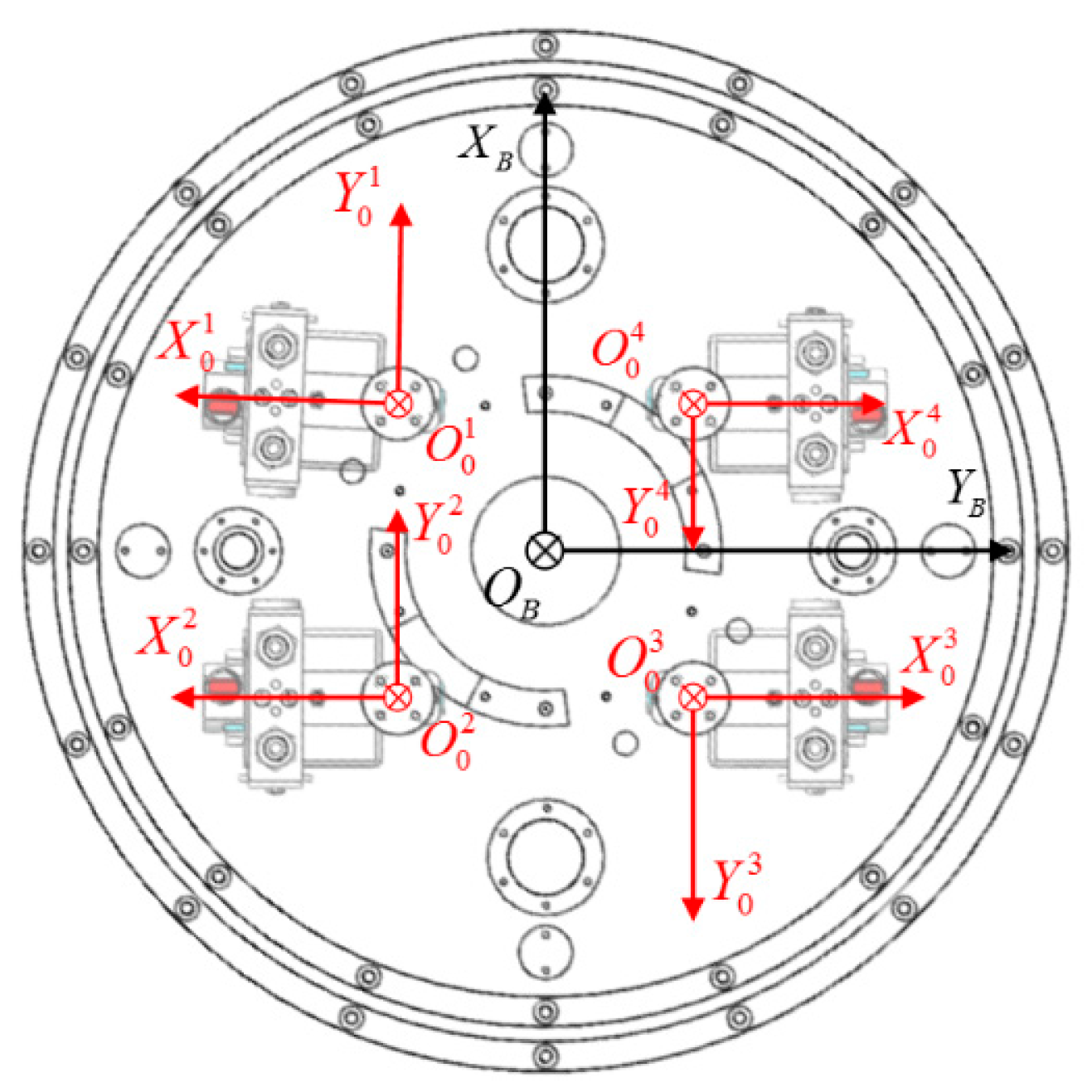
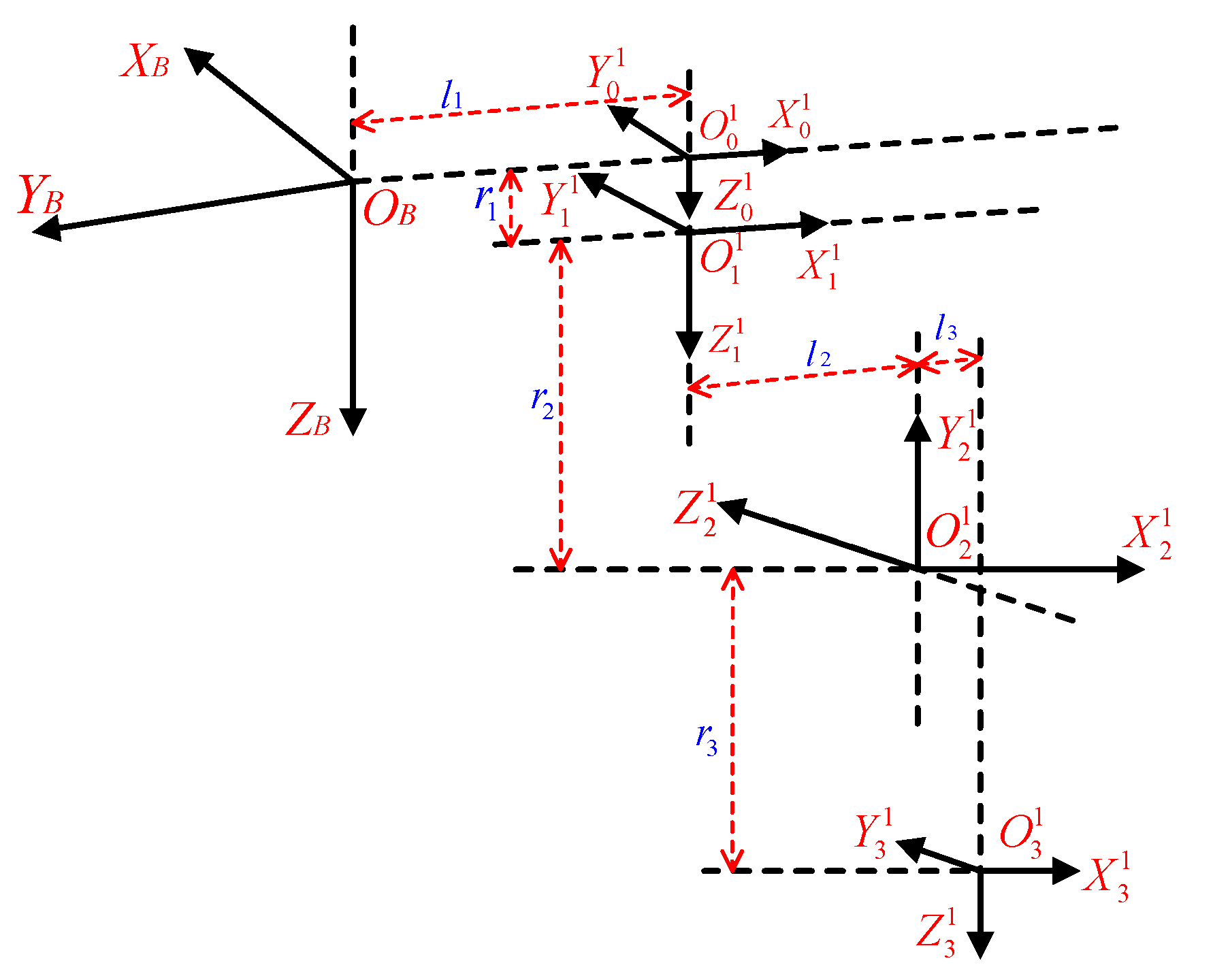
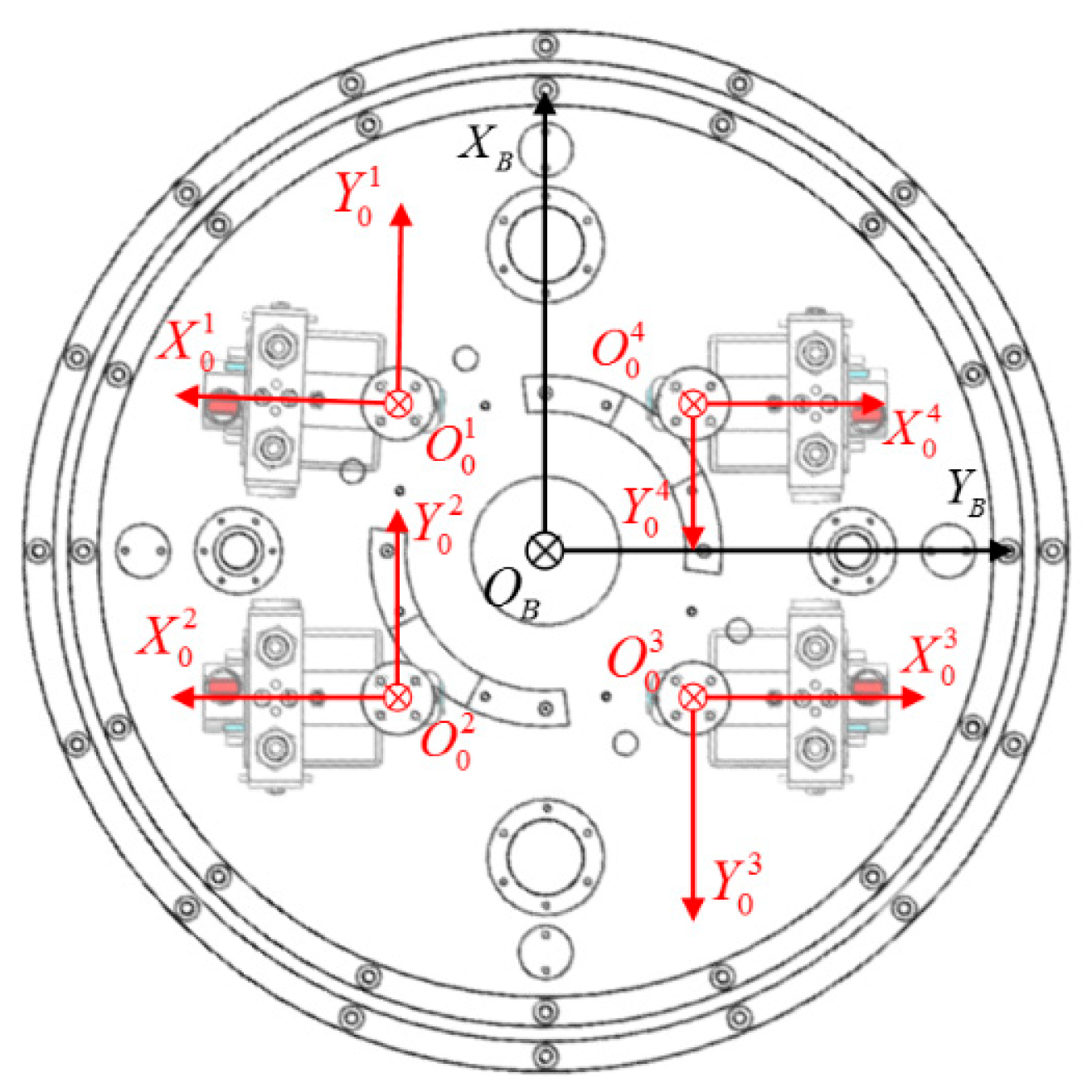
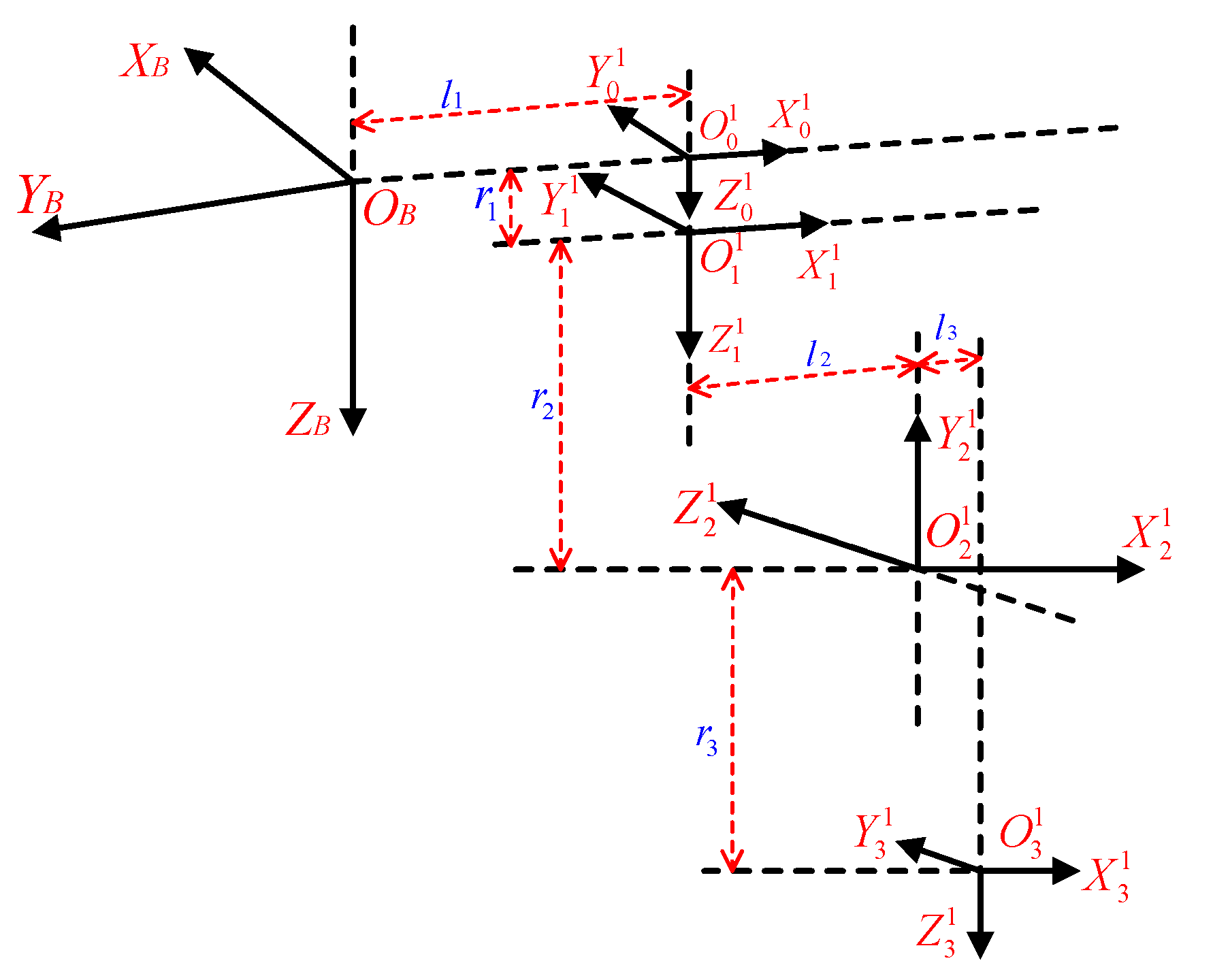
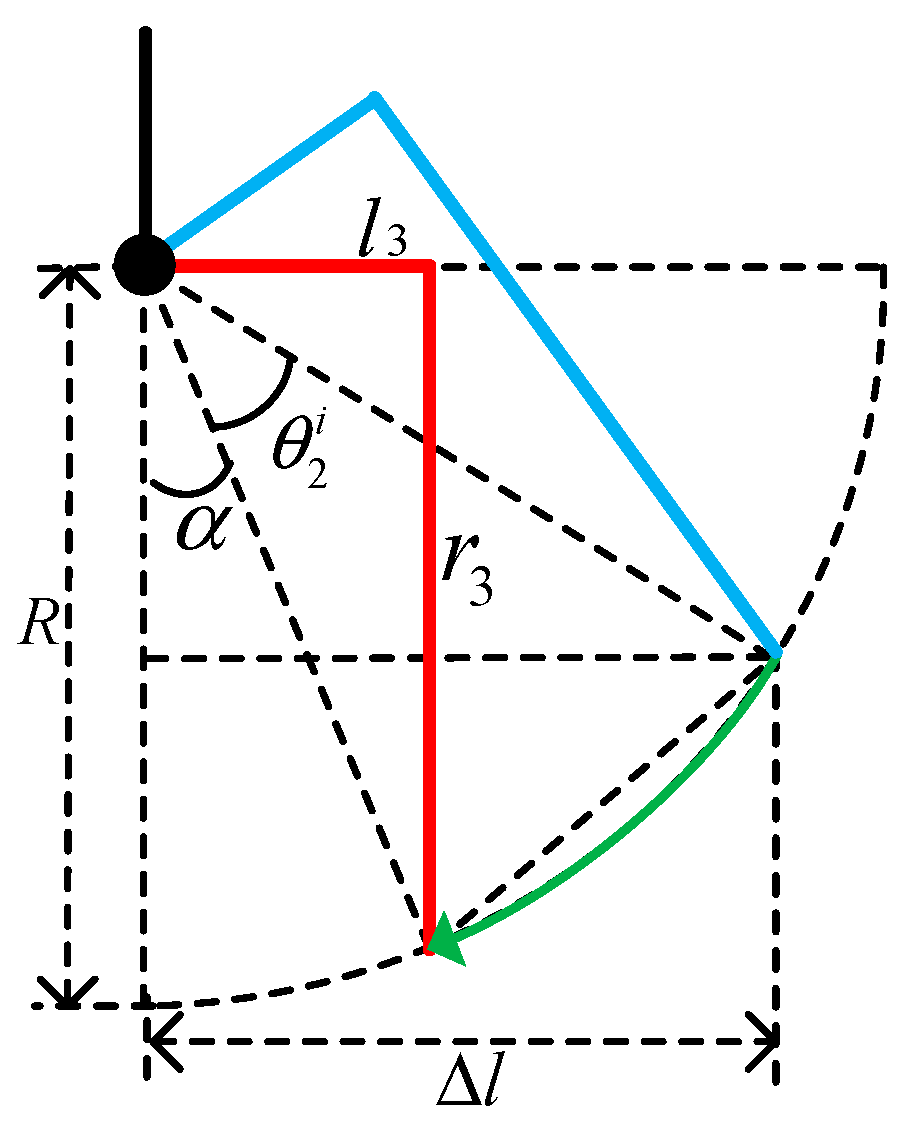
3.1. Forward Kinematic Model of ASR-III
3.2. Inverse Kinematic Model
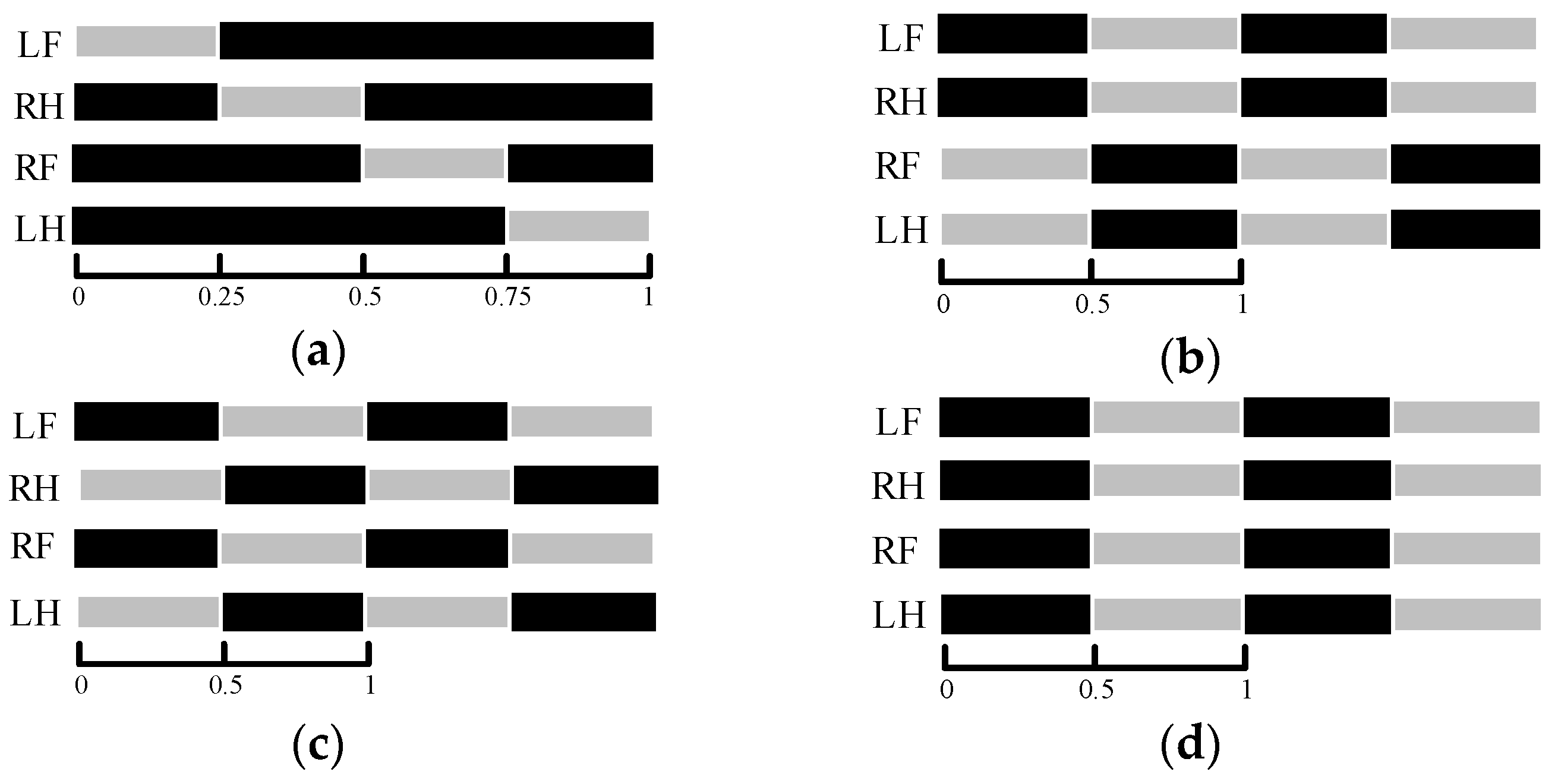
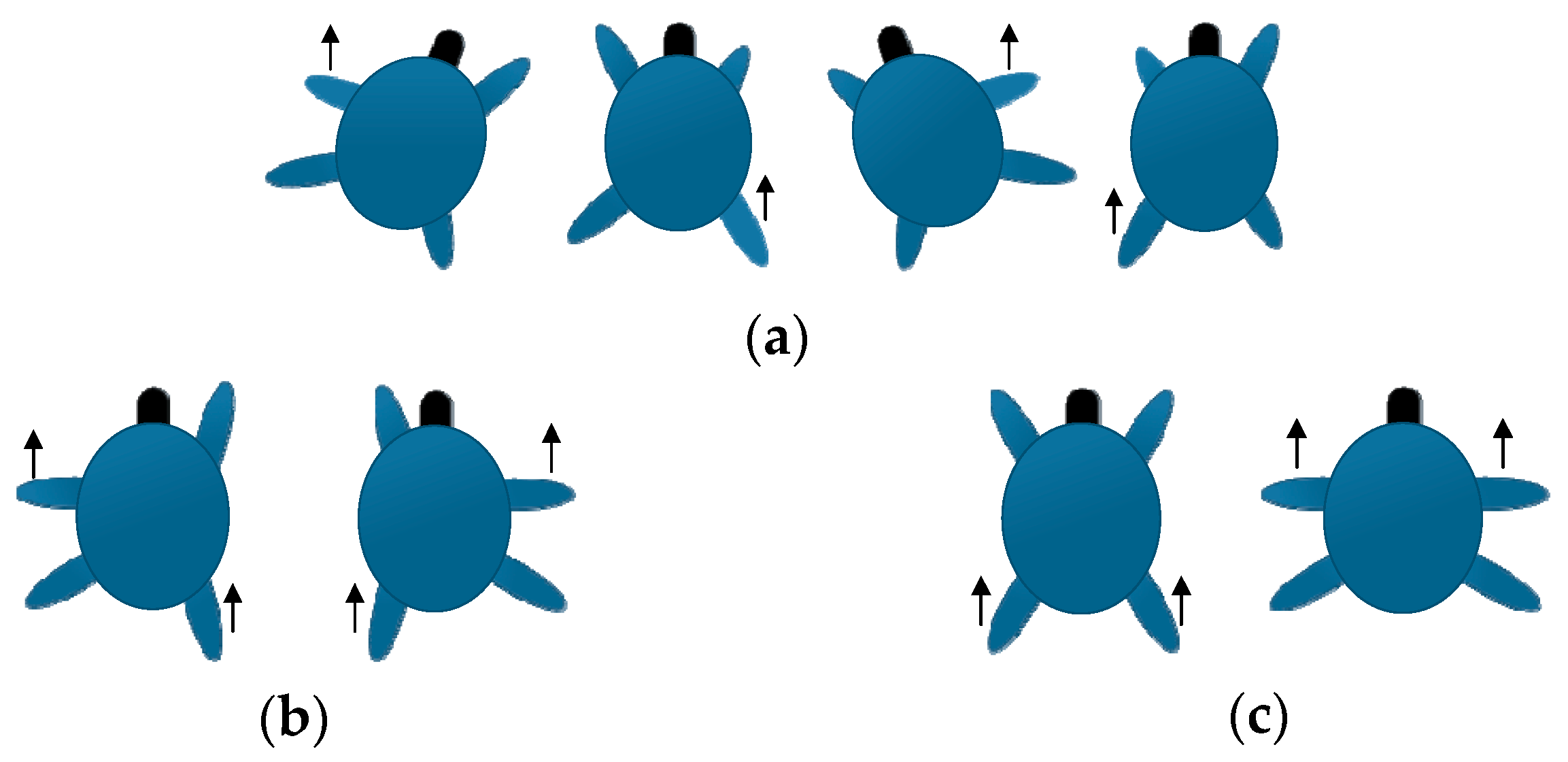
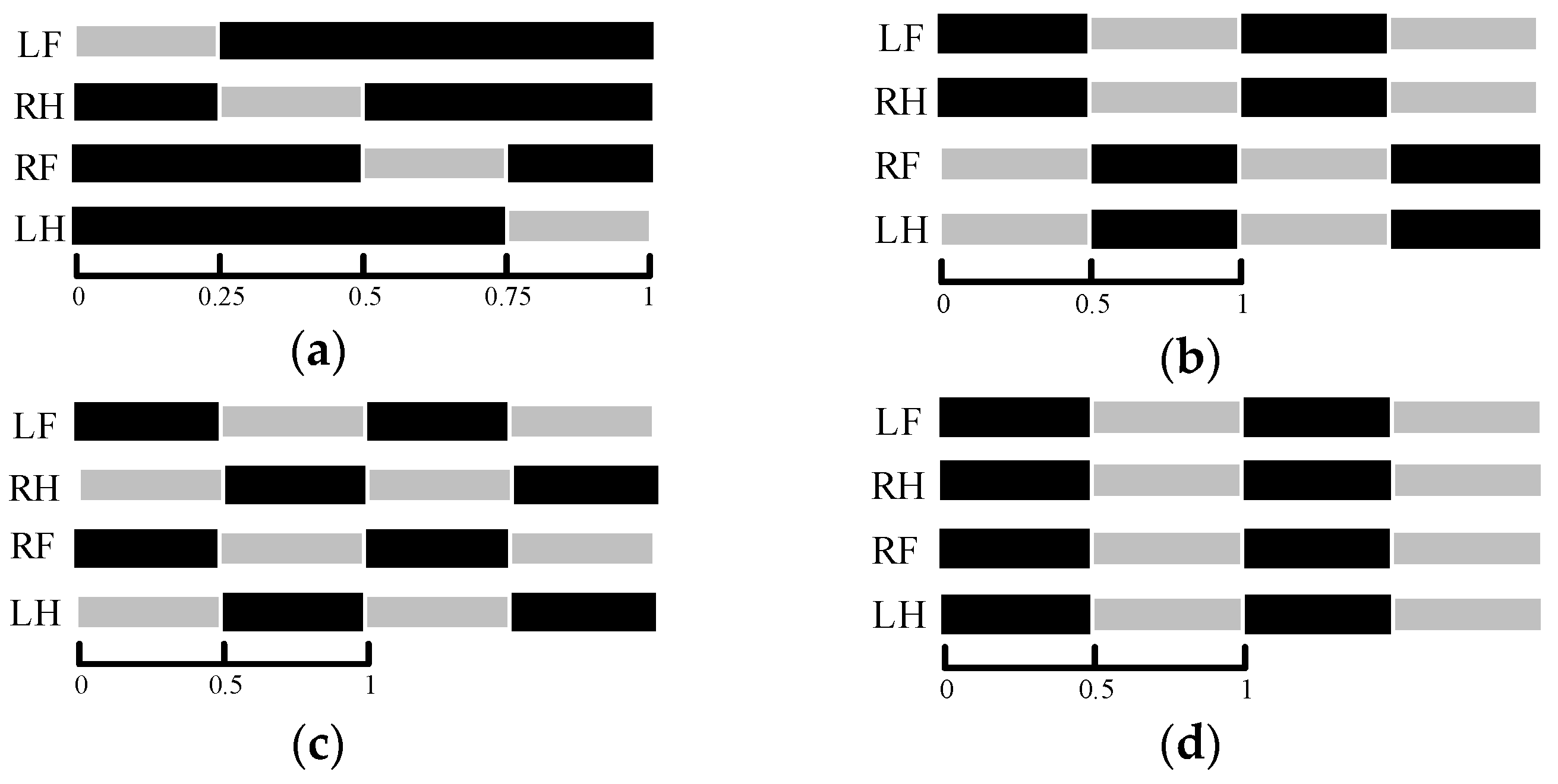
3.3. Multiple On-Land Locomotion
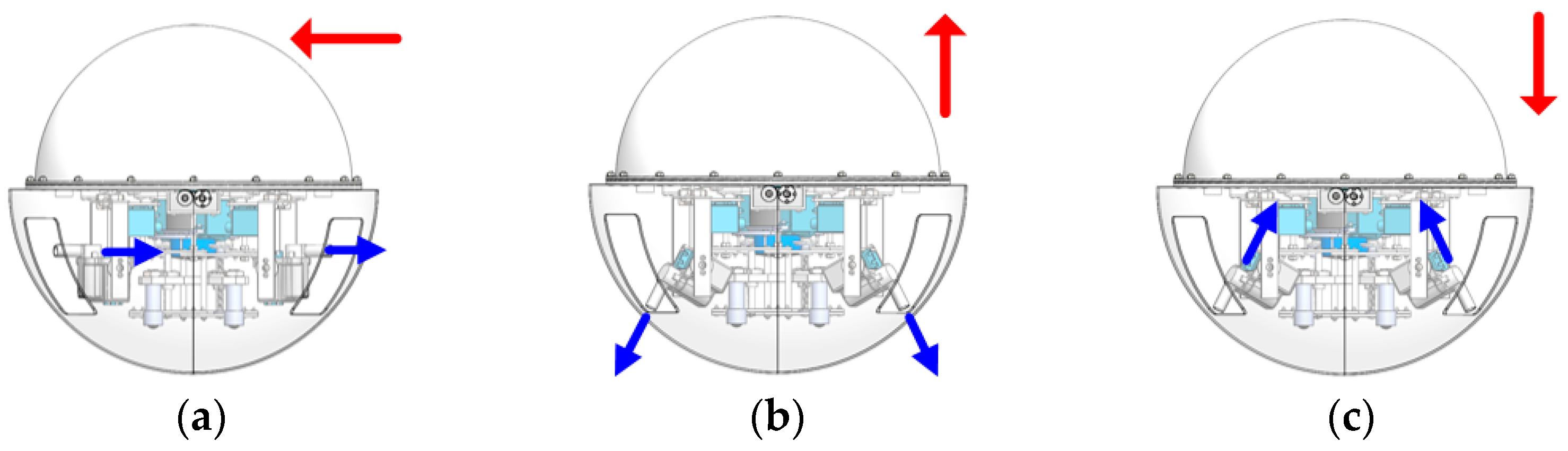
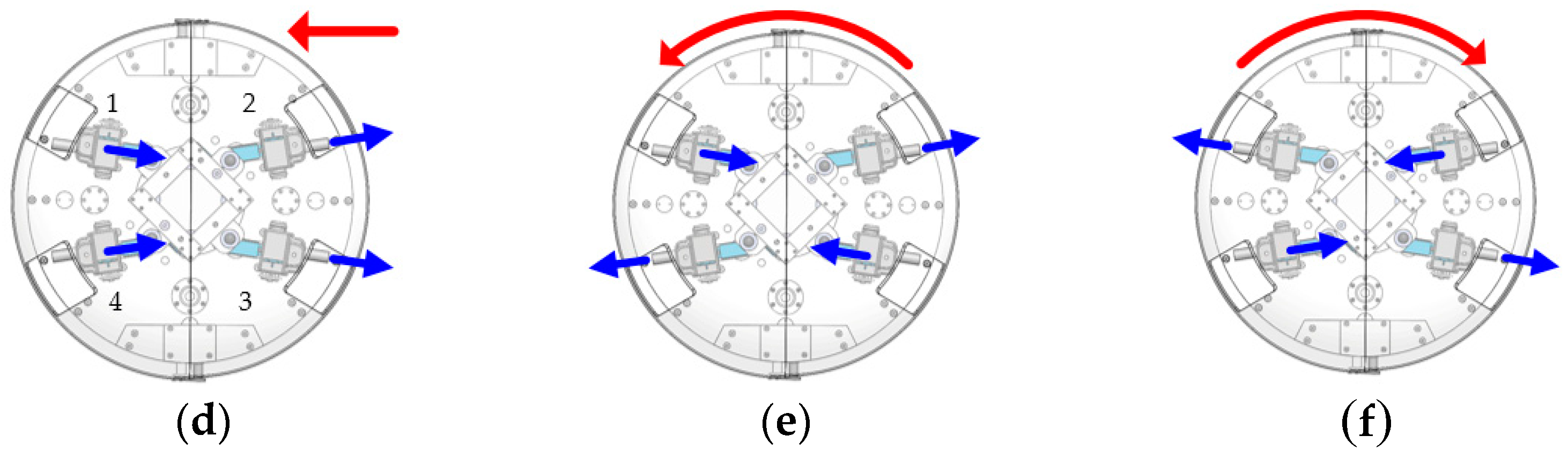
3.4. Underwater Locomotion
4. The On-Land Locomotion Experiments
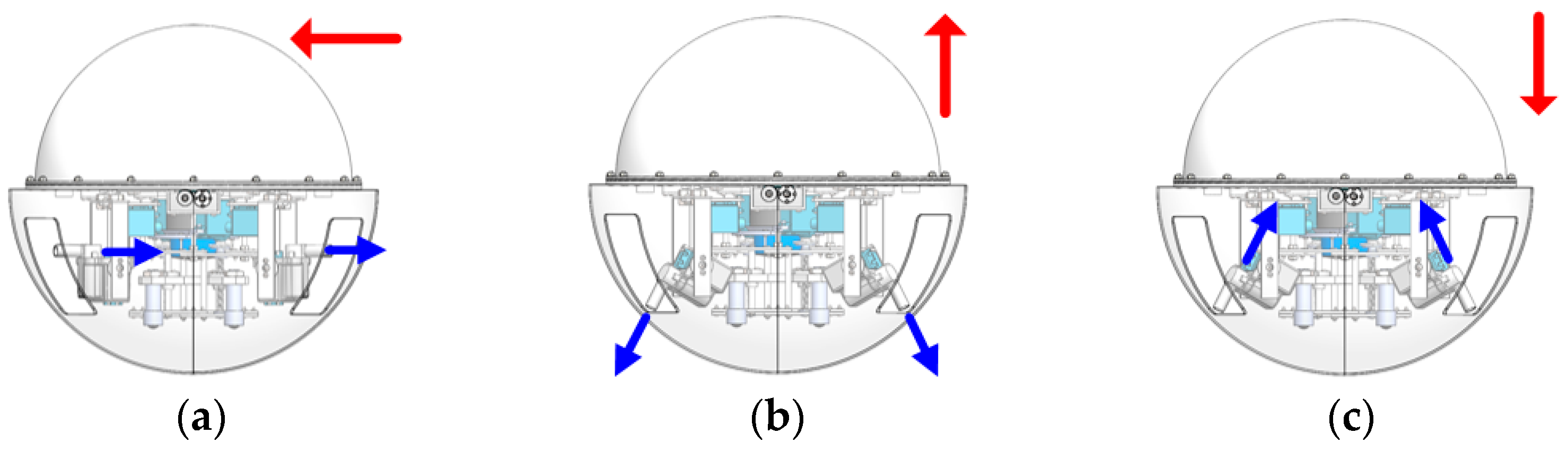
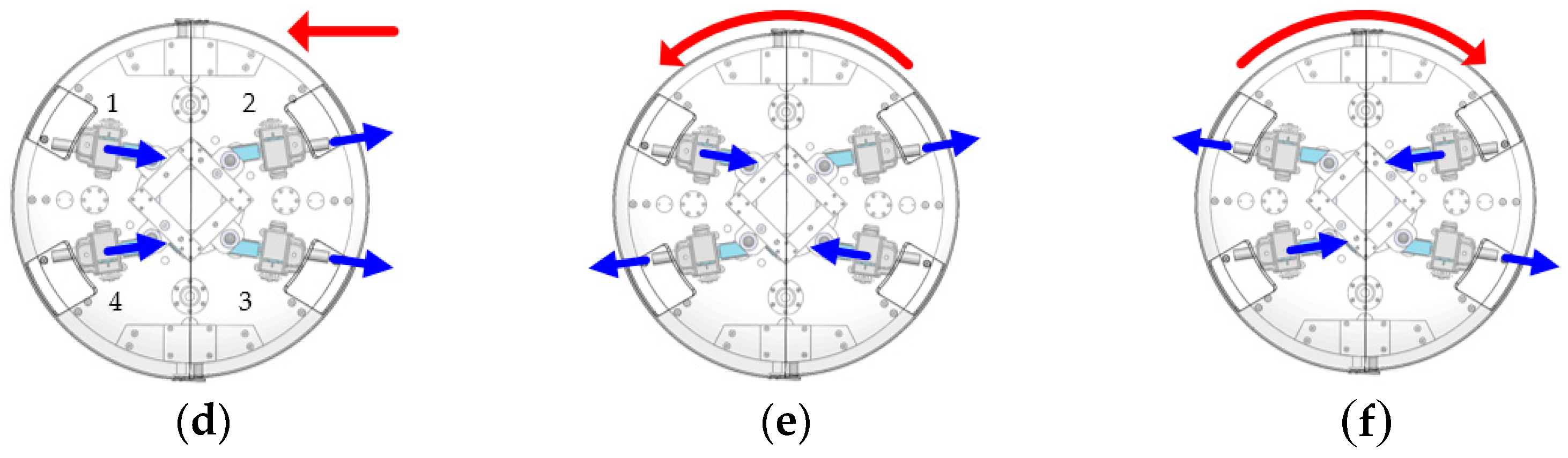
4.1. The Lifting and Supporting Wheel Mechanism (LSWM)
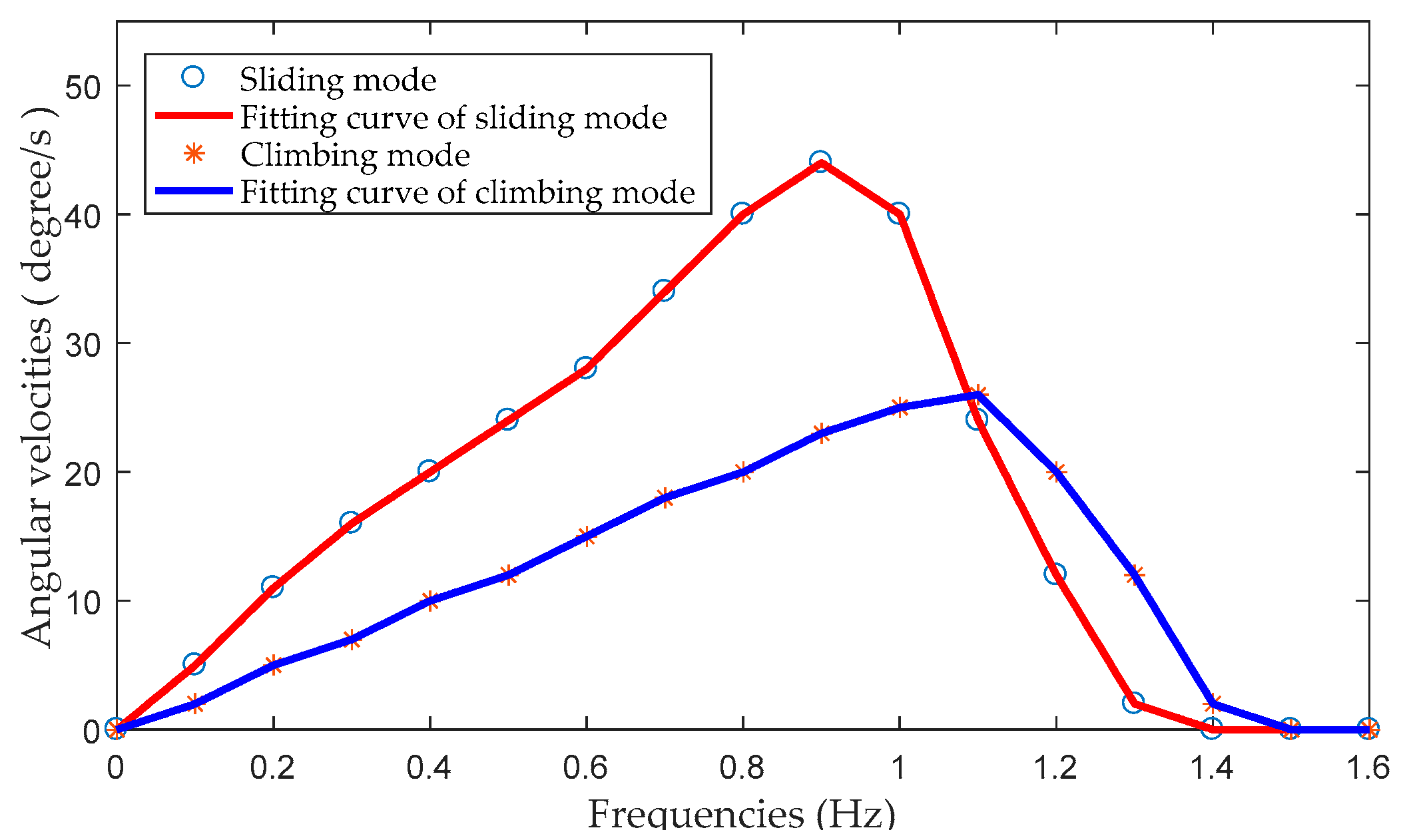
4.2. Sliding Locomotion Using the LSWM
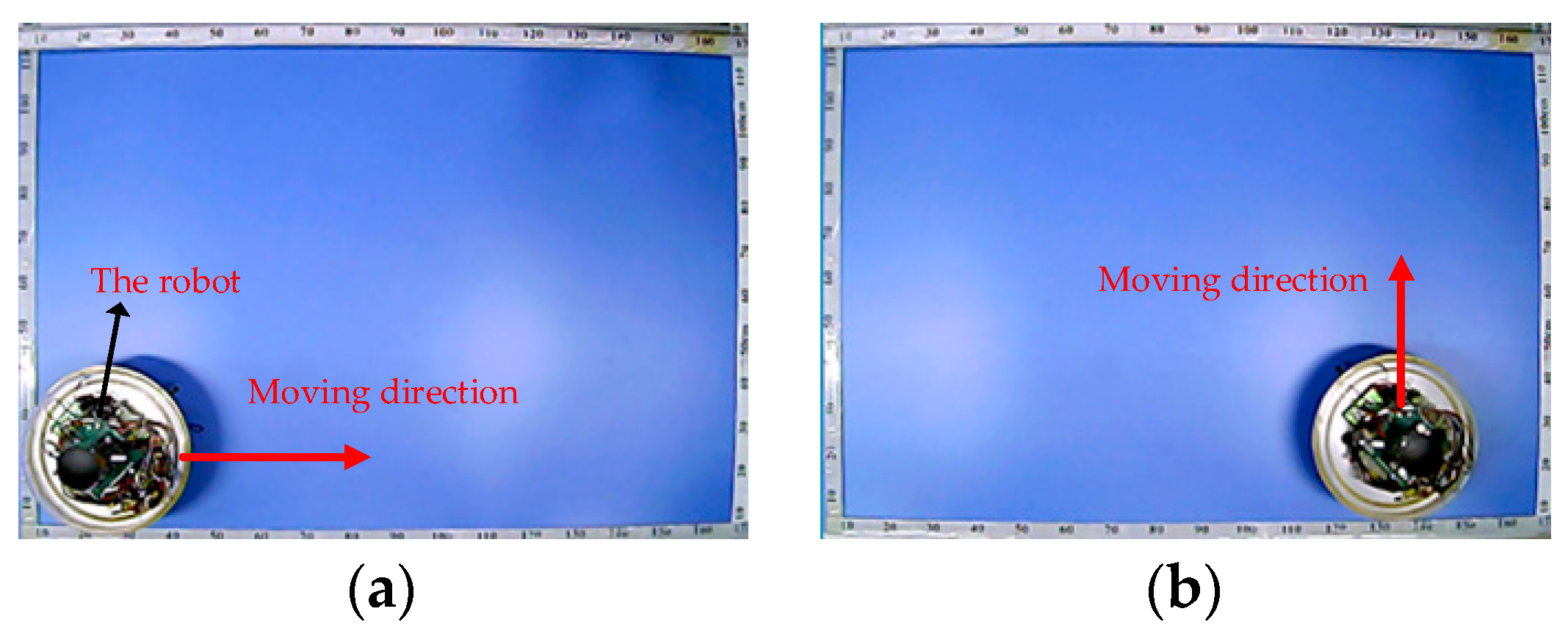
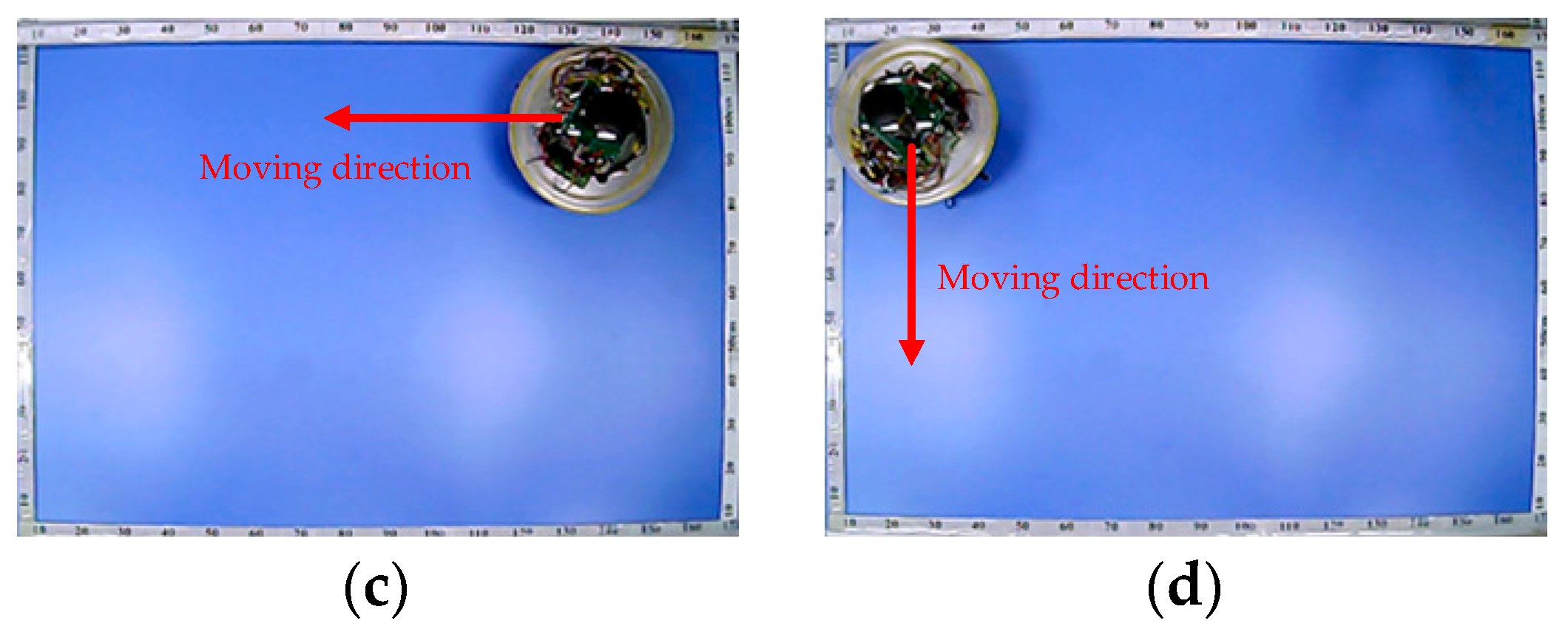
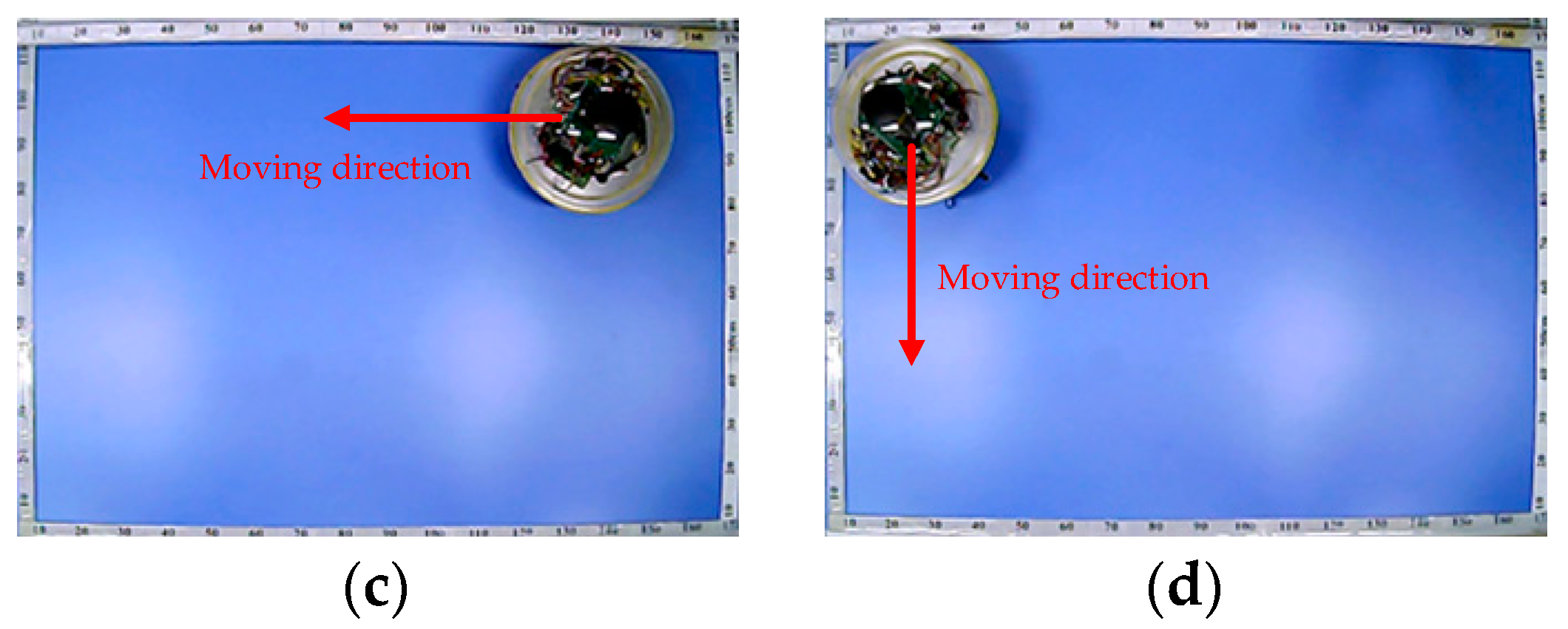
4.3. Two On-Land Locomotion Experiments
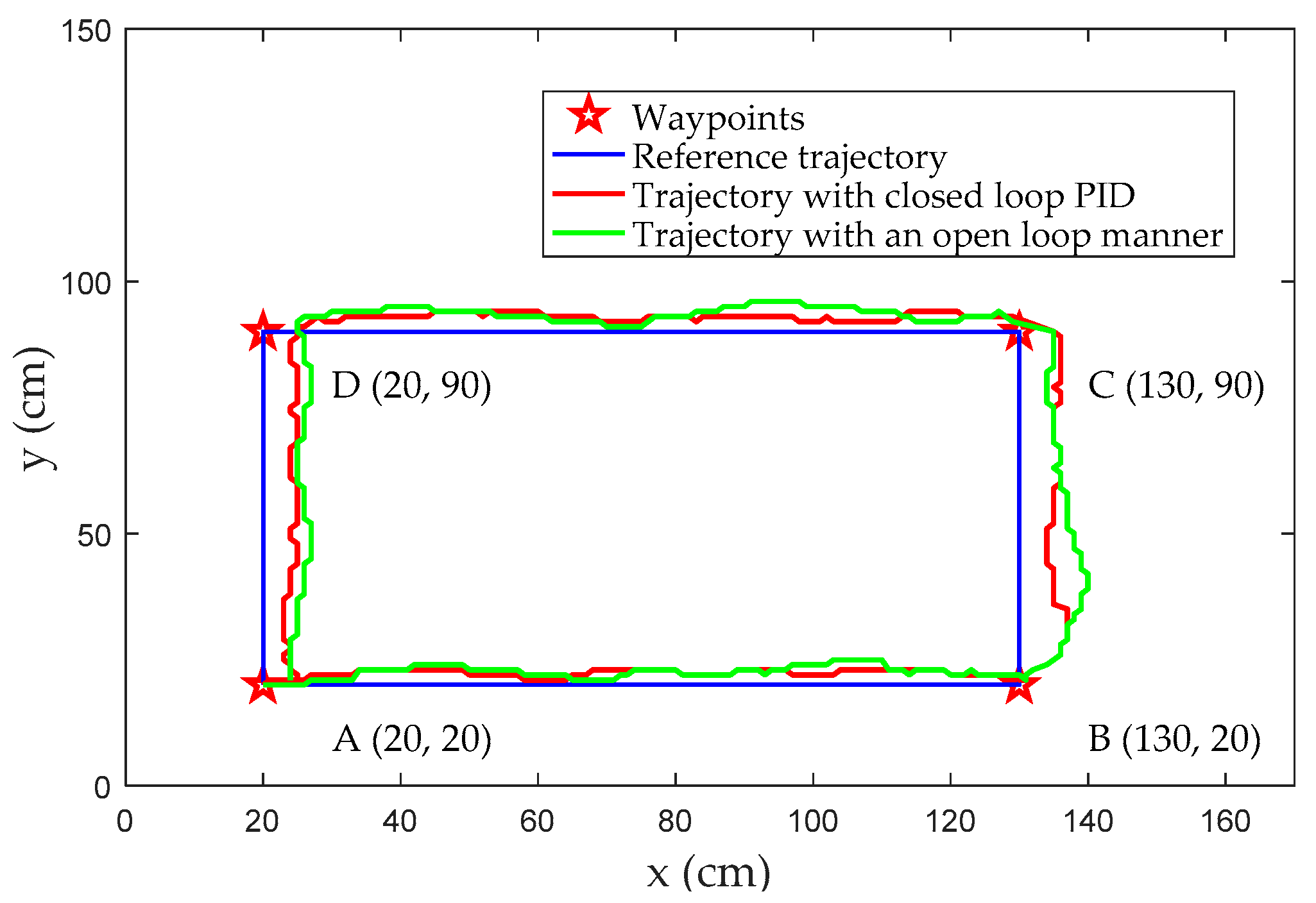
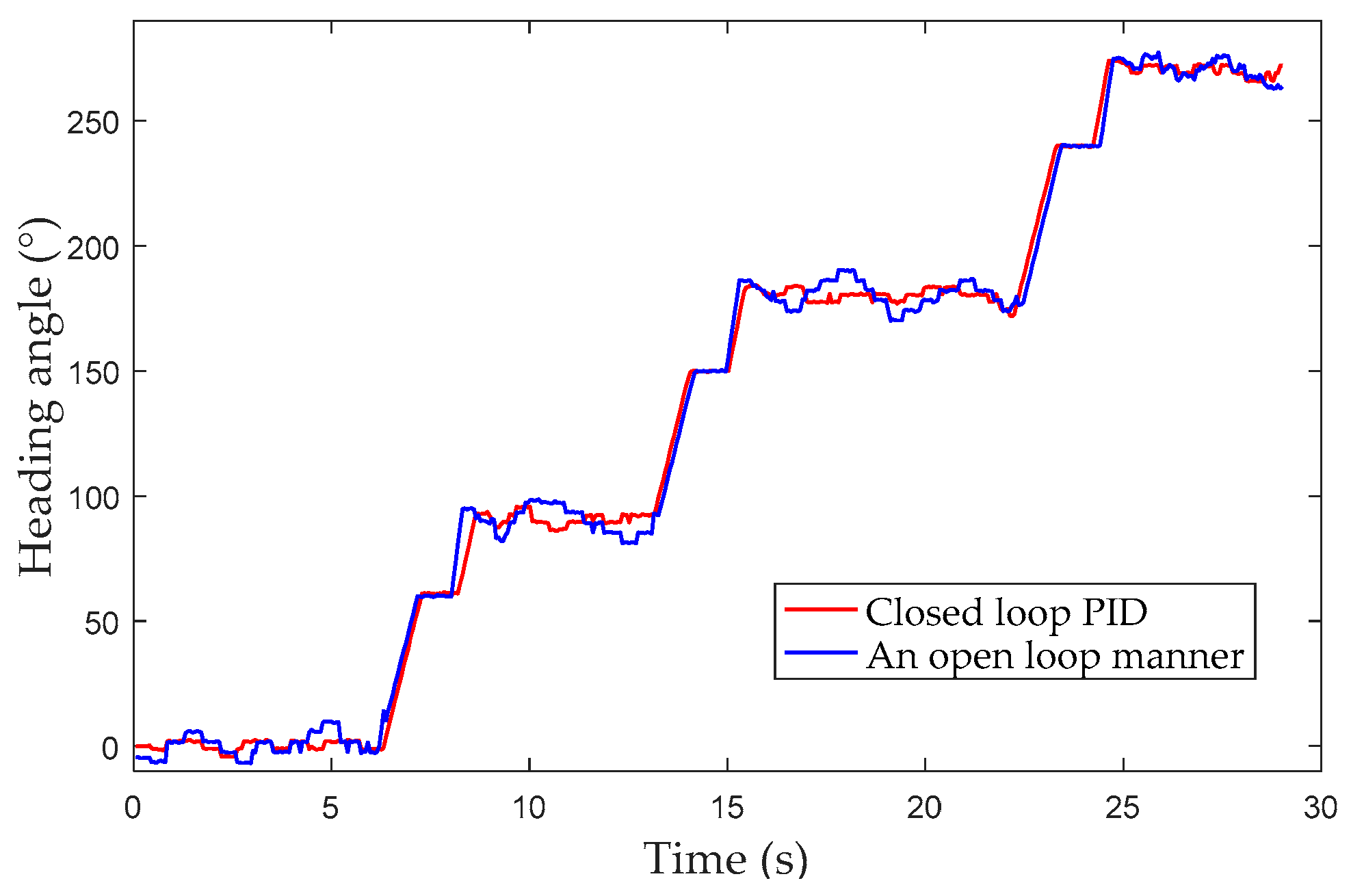
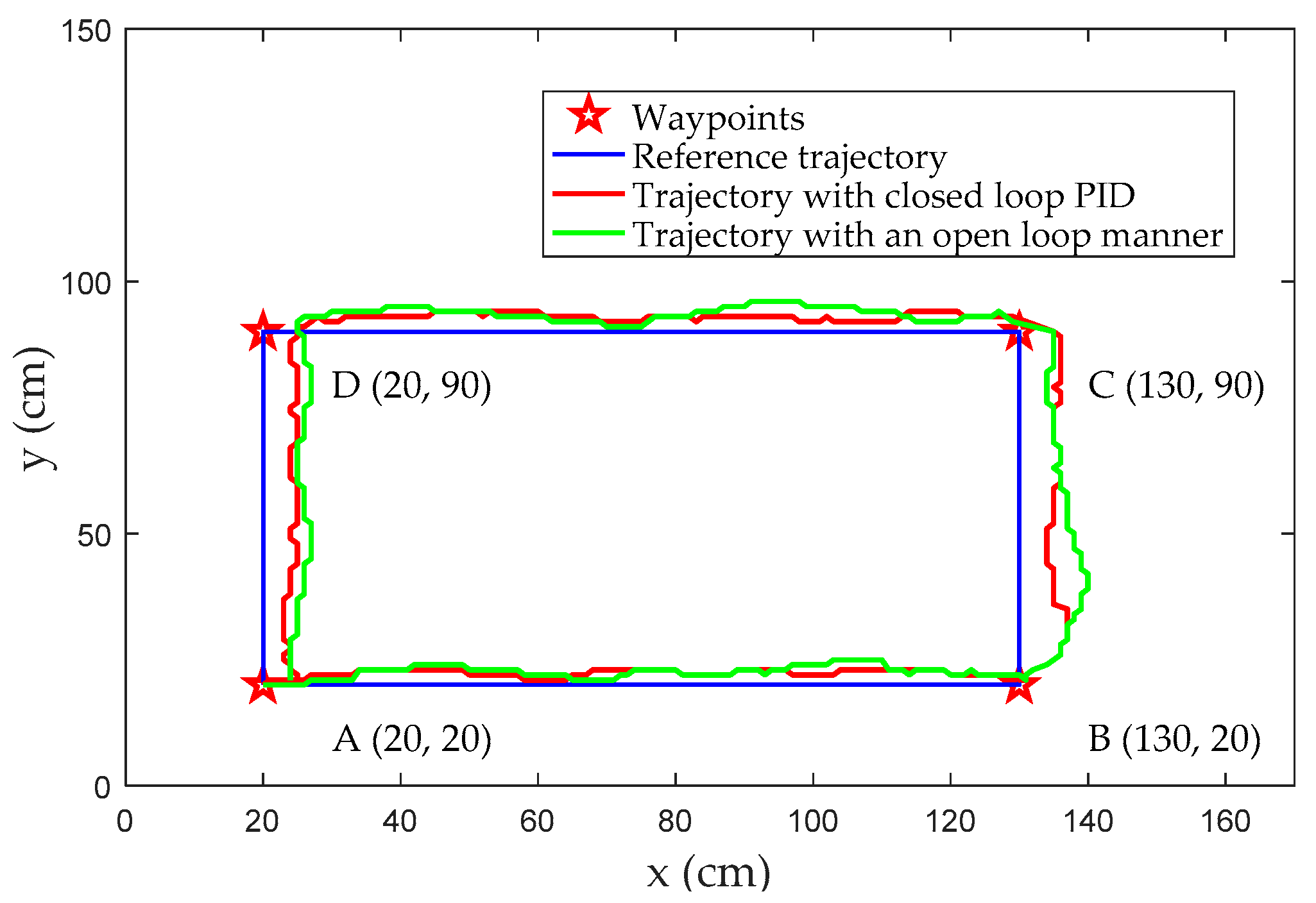
4.4. A Waypoint Tracking Experiment Featuring Closed-Loop Proportional-Integral-Derivative (PID) Control
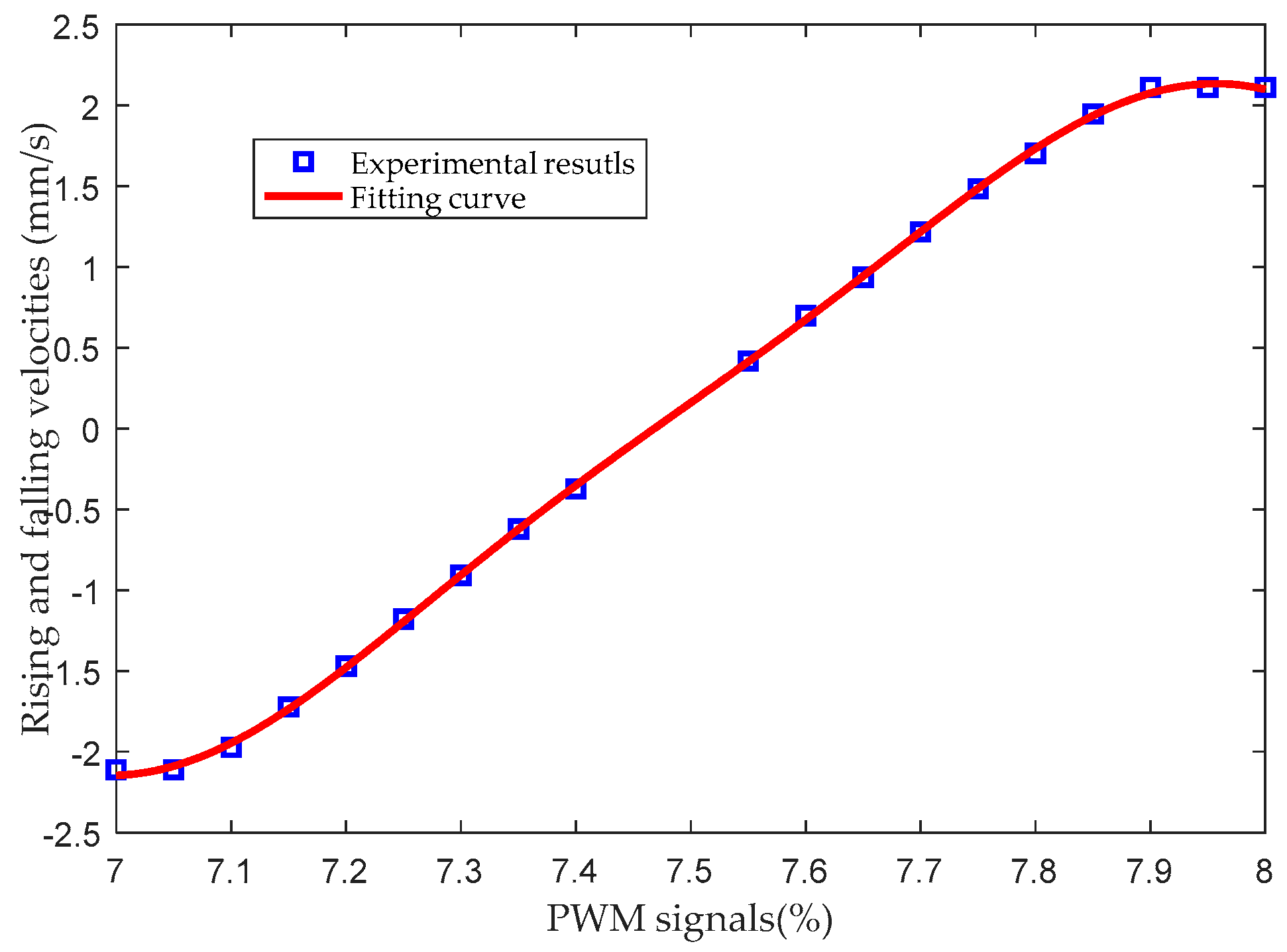
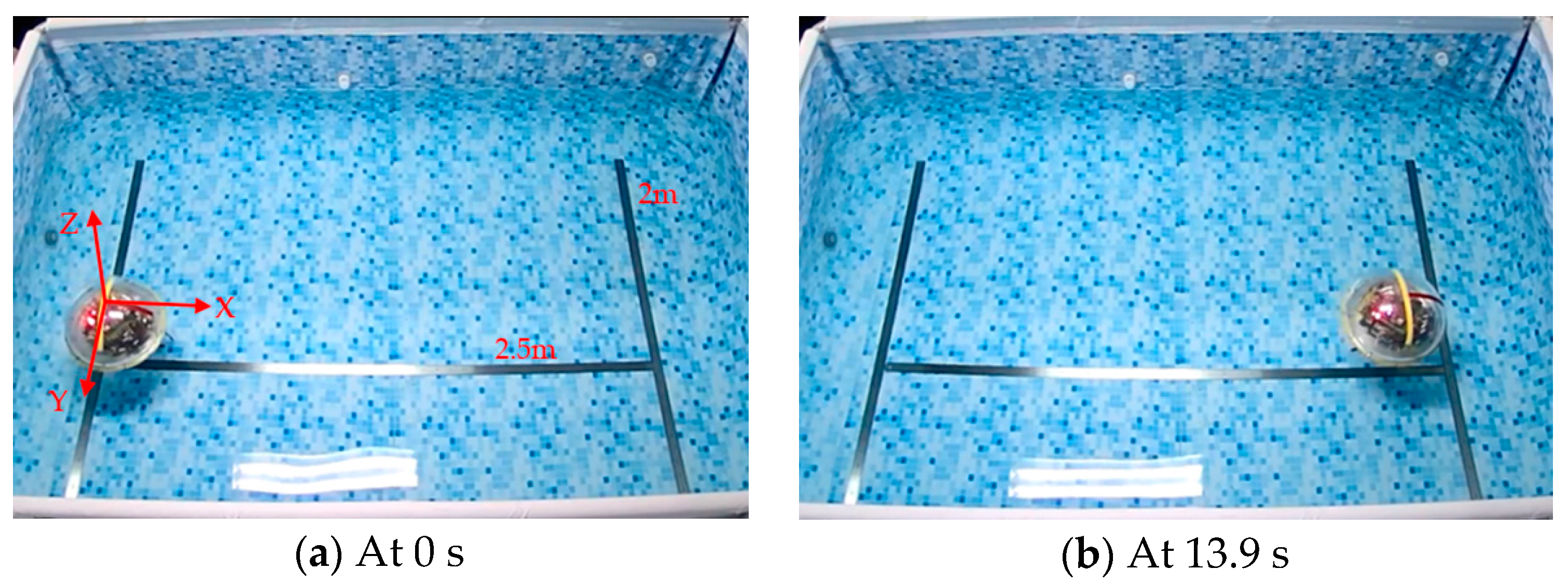
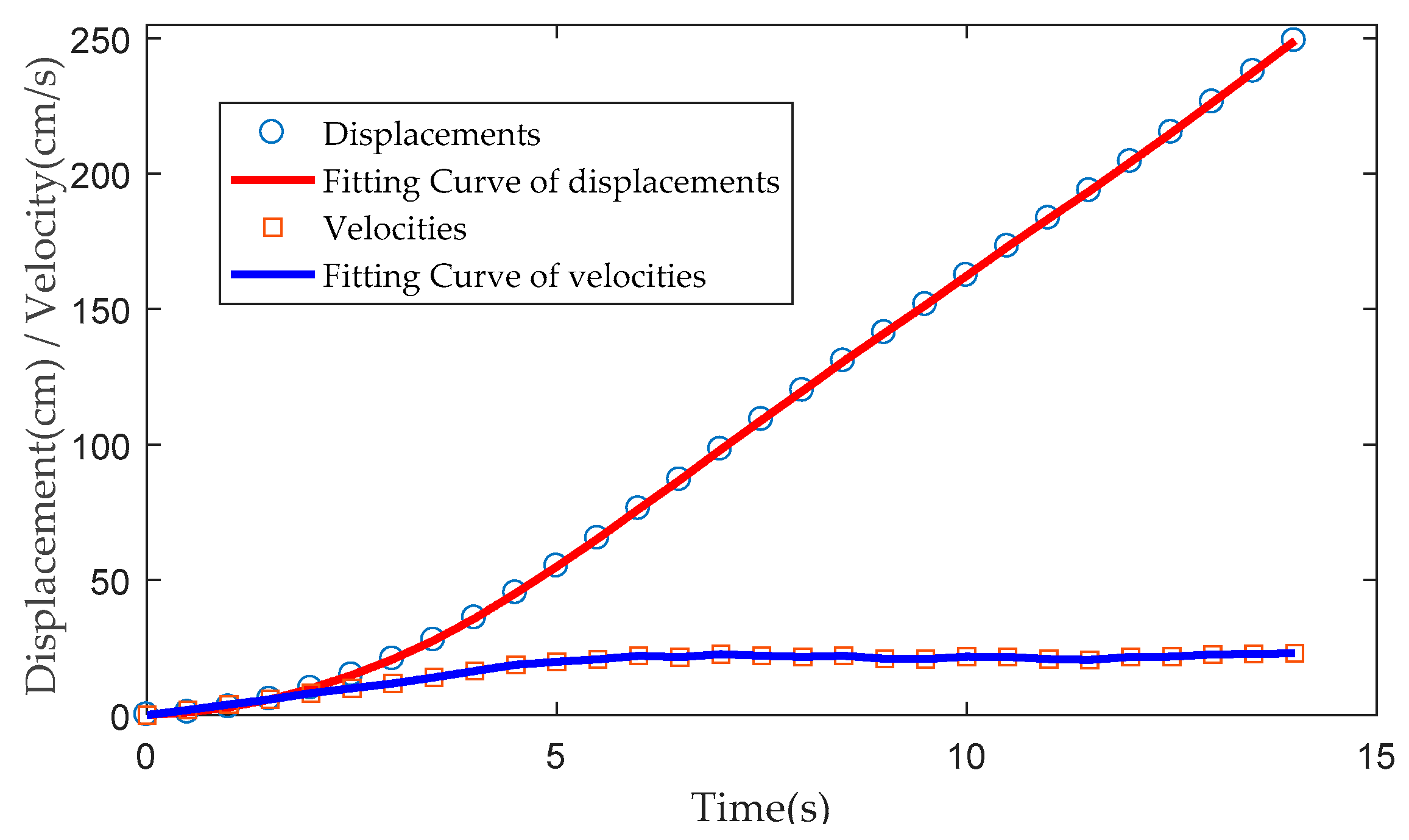
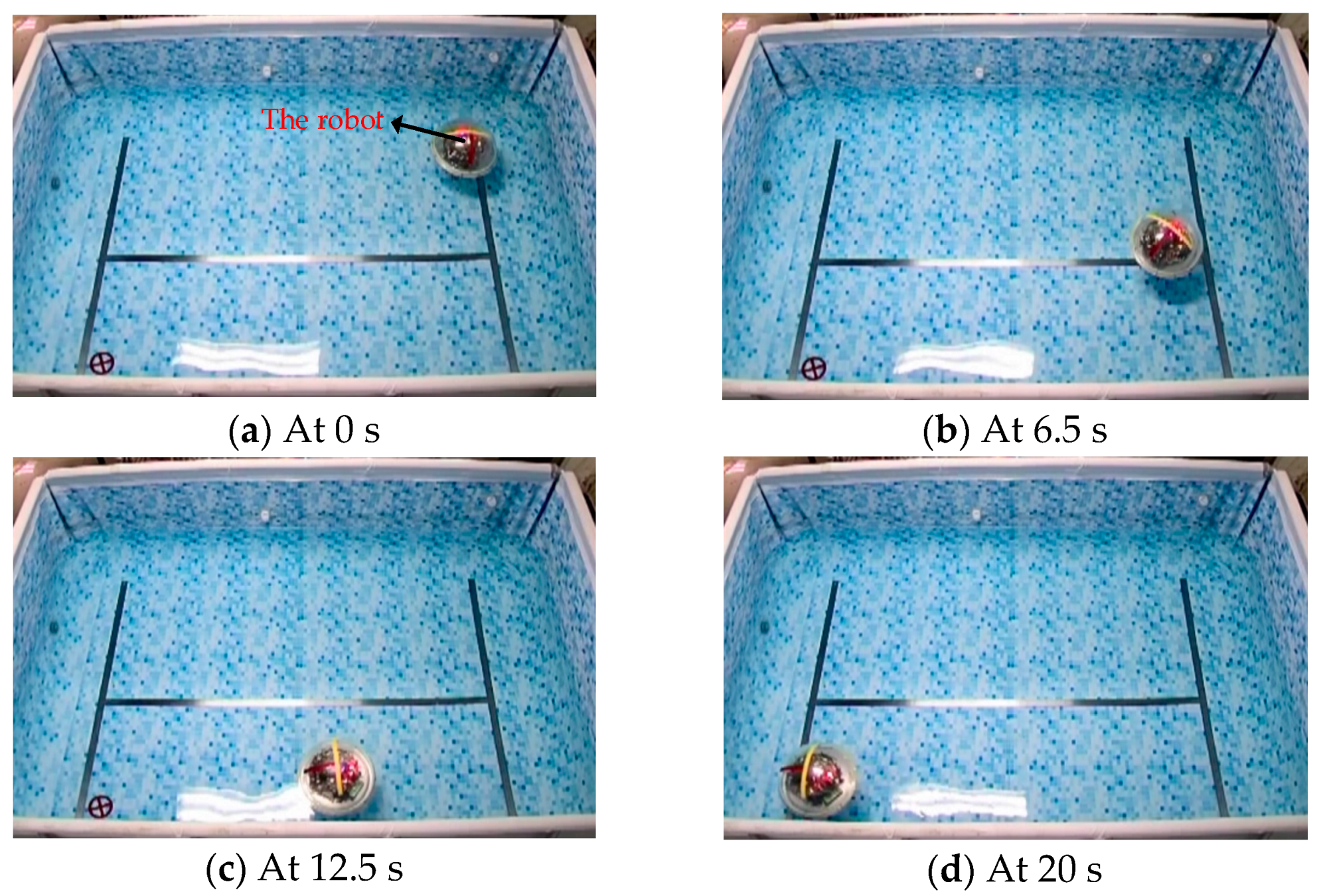
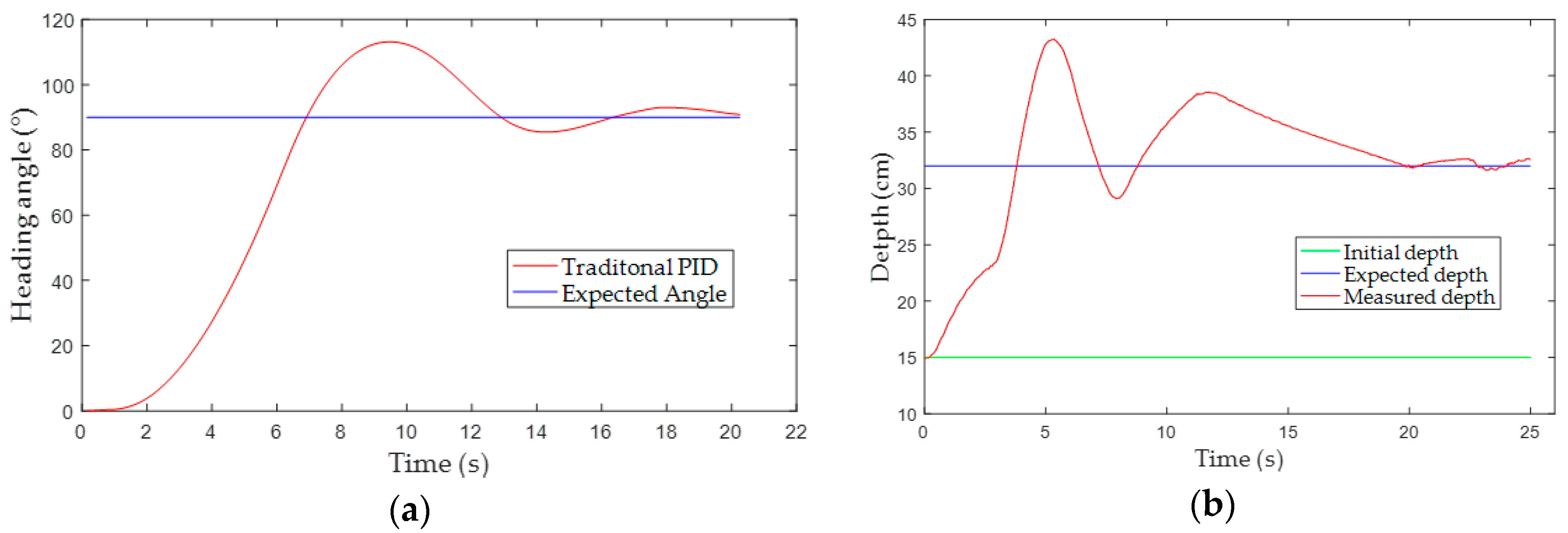
5. The Underwater Locomotion Experiments
6. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Waypoints Tracking Algorithm
| Algorithm A1 Waypoints tracking algorithm with Closed-loop PID Control |
| 1: System Initialization 2: Waypoints set up 3: Go to the next waypoint 4: Calculate the distance 5: IF < 6: IF this waypoint is the last one 7: Waypoints tracking ends 8: ELSE 9: Go to the next waypoint 10: ELSE 11: IF Road is smooth 12: Do ASR-III sliding motion with heading angle control 13: ELSE 14: Do ASR-III climbing motion with heading angle control |
| Algorithm A2 Heading Angle control algorithm |
| 1: Initial the parameters 2: Read the current heading angle 3: Calculate the differential angle 4: While 5: IF or 6: Get Leg PID angle 7: Swing angle of legs 8: Stop and execute the sliding rotary gait 9: ELSE 10: Get leg PID angle 11: IF (turn left) 12: Left legs 13: Right legs 14: ELSE 15: Left legs 16: Right legs 17: Go forward with different swing angles 18: End while |
References
- Shi, Q.; Li, C.; Wang, C.B.; Luo, H.B.; Huang, Q.; Fukuda, T. Design and Implementation of an Omnidirectional Vision System for Robot Perception. Mechatronics 2017, 41, 58–66. [Google Scholar] [CrossRef]
- He, Y.L.; Guo, S.X.; Shi, L.W. Preliminary Mechanical Analysis of an Improved Amphibious Spherical Father Robot. Microsyst. Technol. 2016, 22, 2051–2066. [Google Scholar] [CrossRef]
- Guo, S.X.; Pan, S.W.; Li, X.Q.; Shi, L.W. A System on Chip-based Real-time Tracking System for Amphibious Spherical Robots. Int. J. Adv. Robot. Syst. 2017, 14, 1–19. [Google Scholar] [CrossRef]
- Guo, S.X.; Pan, S.W.; Shi, L.W. Visual Detection and Tracking System for an Amphibious Spherical Robot. Sensors 2017, 17, 870. [Google Scholar] [CrossRef] [PubMed]
- Kaznov, V.; Seeman, M. Outdoor Navigation with a Spherical Amphibious Robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar]
- Shi, Q.; Ishii, H.; Sugahara, Y.; Sugita, H.; Takanishi, A.; Huang, Q.; Fukuda, T. Design and Control of a Biomimetic Robotic Rat for Interaction with Laboratory Rats. IEEE/ASME Trans. Mechatron. 2015, 20, 1832–1842. [Google Scholar] [CrossRef]
- Shi, Q.; Ishii, H.; Kinoshita, S.; Konno, S.; Takanishi, A.; Okabayashi, S.; Iida, N.; Kimura, H.; Shibata, S. Modulation of Rat Behaviour by Using a Rat-like Robot. Bioinspir. Biomim. 2013, 8, 046002. [Google Scholar] [CrossRef] [PubMed]
- Shi, Q.; Ishii, H.; Tanaka, K.; Sugahara, Y.; Takanishi, A.; Okabayashi, S.; Huang, Q.; Fukuda, T. Behavior Modulation of Rats to a Robotic Rat in Multi-rat Interaction. Bioinspir. Biomim. 2015, 10, 050611. [Google Scholar] [CrossRef] [PubMed]
- Jun, B.H.; Shim, H.; Kim, B.; Park, J.Y.; Baek, H.; Lee, P.M.; Kim, W.J.; Park, Y.S. Preliminary Design of the Multi-Legged Underwater Walking Robot CR200. In Proceedings of the Oceans MTS/IEEE Conference, Yeosu, Korea, 21–24 May 2012. [Google Scholar]
- Shim, H.; Yoo, S.Y.; Kang, H.; Jun, B.H. Development of Arm and Leg for Seabed Walking Robot CRABSTER200. Ocean Eng. 2016, 116, 55–67. [Google Scholar] [CrossRef]
- Crespi, A.; Karakasiliotis, K.; Guignard, A.; Ijspeert, A.J. Salamandra Robotica II: An Amphibious Robot to Study Salamander-Like Swimming and Walking Gaits. IEEE Trans. Robot. 2013, 29, 308–320. [Google Scholar] [CrossRef]
- Crespi, A.; Ijspeert, A.J. AmphiBot II: An Amphibious Snake Robot that Crawls and Swims using a Central Pattern Generator. Color Res. Appl. 2006, 27, 130–135. [Google Scholar]
- Tang, Y.G.; Zhang, A.Q.; Yu, J.C. Modeling and Optimization of Wheel-Propeller-Leg Integrated Driving Mechanism for an Amphibious Robot. In Proceedings of the 2nd International Conference on Information and Computing Science, Manchester, UK, 21–22 May 2009; pp. 73–76. [Google Scholar]
- Zhang, S.W.; Zhou, Y.C.; Xu, M.; Liang, X.; Liu, L.; Yang, J. AmphiHex-I: Locomotory Performance in Amphibious Environments with Specially Designed Transformable Flipper Legs. IEEE-ASME Trans. Mechatron. 2016, 21, 1720–1731. [Google Scholar] [CrossRef]
- Sun, Y. Planning of Legged Racewalking Gait for an Epaddle-Based Amphibious Robot. IFAC Proc. Vol. 2012, 45, 218–223. [Google Scholar] [CrossRef]
- Kim, H.; Lee, D.; Liu, Y.; Seo, T.; Jeong, K. Hexapedal Robot for Amphibious Locomotion on Ground and Water. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea, 7–11 July 2015; pp. 121–126. [Google Scholar]
- Aoki, T.; Ito, S.; Sei, Y. Development of quadruped walking robot with spherical shell-mechanical design for rotational locomotion. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 5706–5711. [Google Scholar]
- Yin, X.; Wang, C.; Xie, G. A salamander-like amphibious robot: System and control design. In Proceedings of the International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 956–961. [Google Scholar]
- Boxerbaum, A.S.; Werk, P.; Quinn, R.D.; Vaidyanathan, R. Design of an Autonomous Amphibious Robot for Surf Zone Operation: Part I Mechanical Design for Multi-Mode Mobility. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005; pp. 1459–1464. [Google Scholar]
- Harkins, R.; Ward, J.; Vaidyanathan, R.; Boxerbaum, A.S.; Quinn, R.D. Design of an Autonomous Amphibious Robot for Surf Zone Operations: Part II—Hardware, Control Implementation and Simulation. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 4–28 July 2005; pp. 1465–1470. [Google Scholar]
- Li, B.; Ma, S.G.; Ye, C.L.; Yu, S.M.; Zhang, G.W.; Gong, H.L. Development of an Amphibious Snake-like Robot. In Proceedings of the 8th World Congress on Intelligent Control and Automation (WCICA), Jinan, China, 6–9 July 2010; pp. 613–618. [Google Scholar]
- Hirose, S.; Yamada, H. Snake-like Robots: Machine Design of Biologically Inspired Robots. IEEE Robot. Autom. Mag. 2003, 16, 88–98. [Google Scholar] [CrossRef]
- Pan, S.W.; Guo, S.X.; Shi, L.W.; He, Y.L.; Wang, Z.; Huang, Q. A Spherical Robot based on all Programmable SoC and 3-D Printing. In Proceedings of the 11th IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 3–6 August 2014; pp. 150–155. [Google Scholar]
- He, Y.L.; Guo, S.X.; Shi, L.W.; Pan, S.W.; Wang, Z. 3D Printing Technology-based an Amphibious Spherical Robot. In Proceedings of the 11th IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 3–6 August 2014; pp. 1382–1387. [Google Scholar]
- He, Y.L.; Shi, L.W.; Guo, S.X.; Guo, P.; Xiao, R. Numerical Simulation and Hydrodynamic Analysis of an Amphibious Spherical Robot. In Proceedings of the IEEE International Conference on Mechatronics & Automation, Beijing, China, 2–5 August 2015; pp. 848–853. [Google Scholar]
- Pan, S.W.; Shi, L.W.; Guo, S.X.; Guo, P.; He, Y.L.; Xiao, R. A Low-power SoC-based Moving Target Detection System for Amphibious Spherical Robots. In Proceedings of the IEEE International Conference on Mechatronics & Automation, Beijing, China, 2–5 August 2015; pp. 1116–1121. [Google Scholar]
- Shi, L.W.; Xiao, R.; Guo, S.X.; Guo, P.; Pan, S.W.; He, Y.L. An Attitude Estimation System for Amphibious Spherical Robots. In Proceedings of the IEEE International Conference on Mechatronics & Automation, Beijing, China, 2–5 August 2015; pp. 2076–2081. [Google Scholar]
- Pan, S.W.; Shi, L.W.; Guo, S.X. A Kinect-Based Real-Time Compressive Tracking Prototype System for Amphibious Spherical Robots. Sensors 2015, 15, 8232–8252. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Guo, S.X.; Li, L.G. Design and Characteristic Evaluation of a Novel Amphibious Spherical Robot. In Proceedings of the 3rd International Conference on Engineering and Technology Innovation (ICETI), Kenting, Taiwan, 31 October–4 November 2014; Volume 23, p. 6. [Google Scholar]
- Nishimura, Y.; Mikami, S. Learning Adaptive Escape Behavior for Wheel-Legged Robot by Inner Torque Information. In Proceedings of the 2016 Joint 8th International Conference on Soft Computing and Intelligent Systems (SCIS) and 17th International Symposium on Advanced Intelligent Systems, Sapporo, Japan, 25–28 August 2016; pp. 10–15. [Google Scholar]
- Endo, G.; Hirose, S. Study on Roller-Walker (system integration and basic experiments). In Proceedings of the 1999 IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999. [Google Scholar]
- Endo, G.; Hirose, S. Study on Roller-Walker—Adaptation of characteristics of the propulsion by a leg trajectory. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 1532–1537. [Google Scholar]
- Endo, G.; Hirose, S. Study on Roller-Walker—Energy efficiency of Roller-Walk. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5050–5055. [Google Scholar]
- Endo, G.; Hirose, S. Study on Roller-Walker (multi-mode steering control and self-contained locomotion). In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; Volume 3, pp. 2808–2814. [Google Scholar]
- Li, M.X.; Guo, S.X. A Roller-Skating/Walking Mode-based Amphibious Robot. Robot. Comput. Integr. Manuf. 2017, 44, 17–29. [Google Scholar] [CrossRef]
- Shi, L.W.; Su, S.X.; Guo, S.X. A Fuzzy PID Control Method for the Underwater Spherical Robot. In Proceedings of the IEEE International Conference on Mechatronics & Automation, Takamatsu, Japan, 6–9 August 2017; pp. 626–631. [Google Scholar]
- Shi, L.W.; Pan, S.W.; Guo, S.X. Design and Evaluation of Quadruped Gaits for Amphibious Spherical Robots. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Qingdao, China, 3–7 December 2017; pp. 13–18. [Google Scholar]
- Li, M.X.; Guo, S.X. Design and performance evaluation of an amphibious spherical robot. Robot. Auton. Syst. 2015, 64, 21–34. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | (mm) | (mm) | |||
|---|---|---|---|---|---|
| 1 | 0 | 0 | (10) | ||
| 2 | 0 | (40) | (95) | ||
| 3 | 0 | (20) | (60) | 0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, H.; Guo, S.; Shi, L.; He, Y.; Su, S.; Chen, Z.; Hou, X. Hybrid Locomotion Evaluation for a Novel Amphibious Spherical Robot. Appl. Sci. 2018, 8, 156. https://doi.org/10.3390/app8020156
Xing H, Guo S, Shi L, He Y, Su S, Chen Z, Hou X. Hybrid Locomotion Evaluation for a Novel Amphibious Spherical Robot. Applied Sciences. 2018; 8(2):156. https://doi.org/10.3390/app8020156
Chicago/Turabian StyleXing, Huiming, Shuxiang Guo, Liwei Shi, Yanlin He, Shuxiang Su, Zhan Chen, and Xihuan Hou. 2018. "Hybrid Locomotion Evaluation for a Novel Amphibious Spherical Robot" Applied Sciences 8, no. 2: 156. https://doi.org/10.3390/app8020156
APA StyleXing, H., Guo, S., Shi, L., He, Y., Su, S., Chen, Z., & Hou, X. (2018). Hybrid Locomotion Evaluation for a Novel Amphibious Spherical Robot. Applied Sciences, 8(2), 156. https://doi.org/10.3390/app8020156