Motion Planning for Bipedal Robot to Perform Jump Maneuver



 and
and
Abstract
:1. Introduction
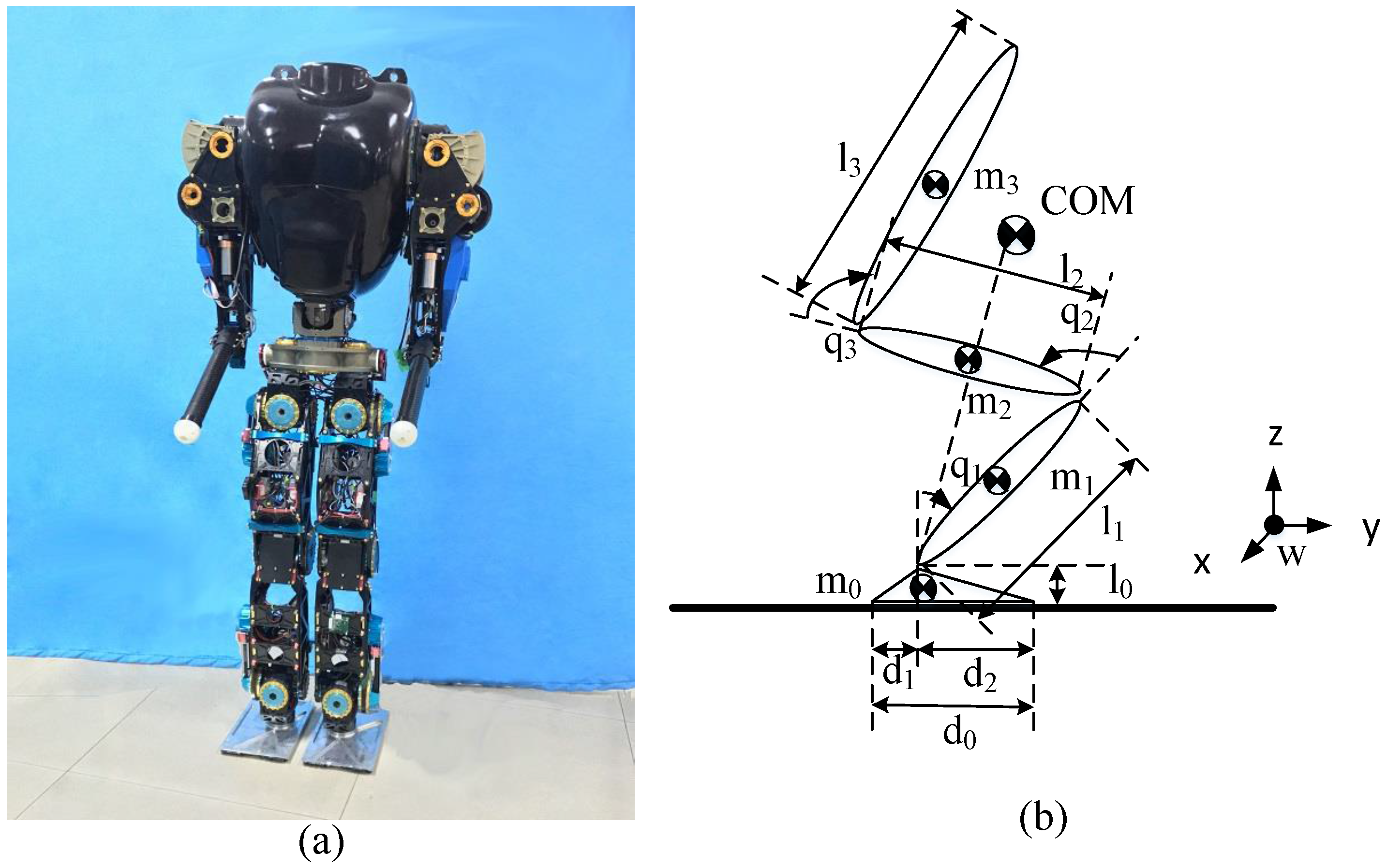
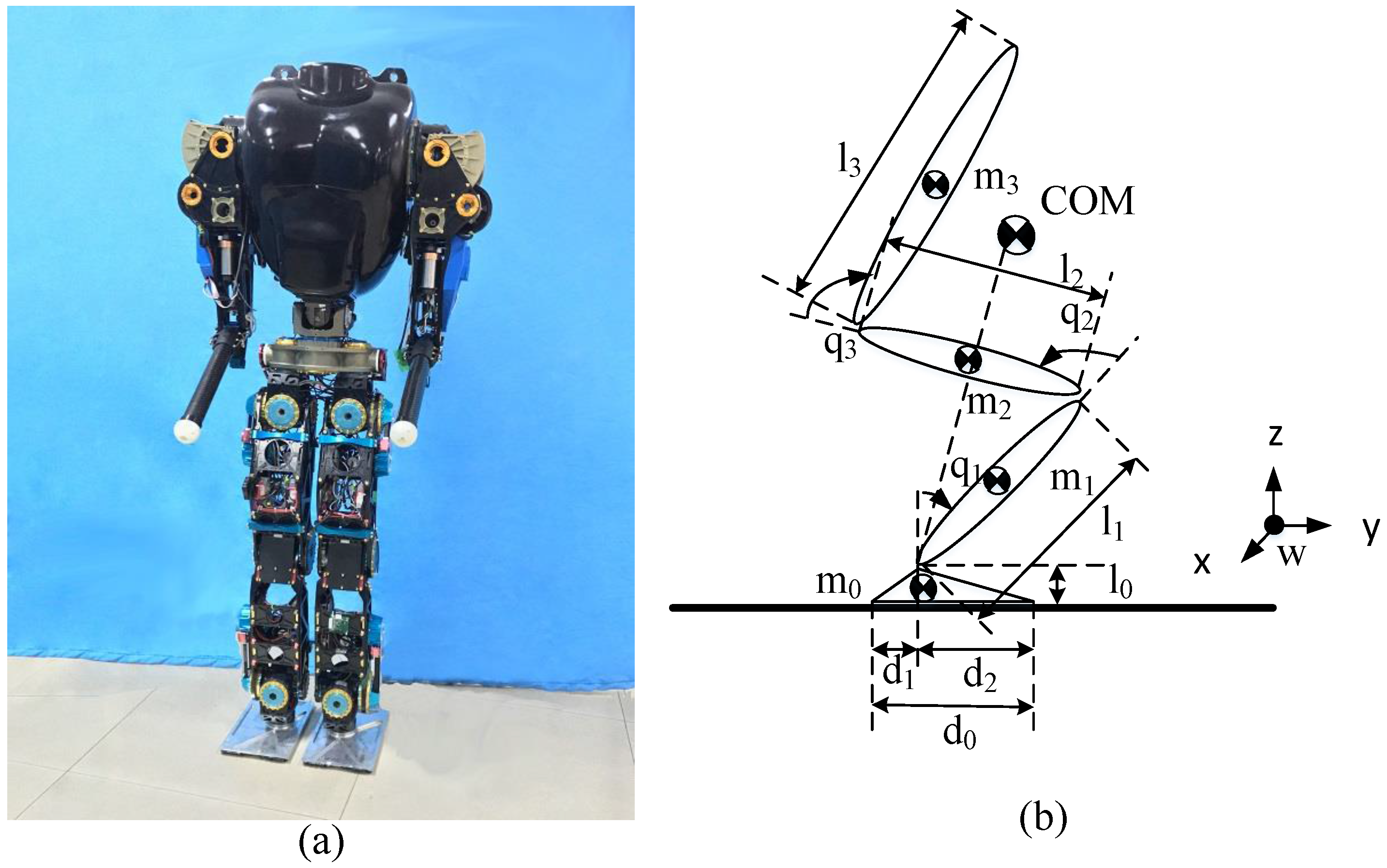
2. Robot Model
2.1. Mechanical Model
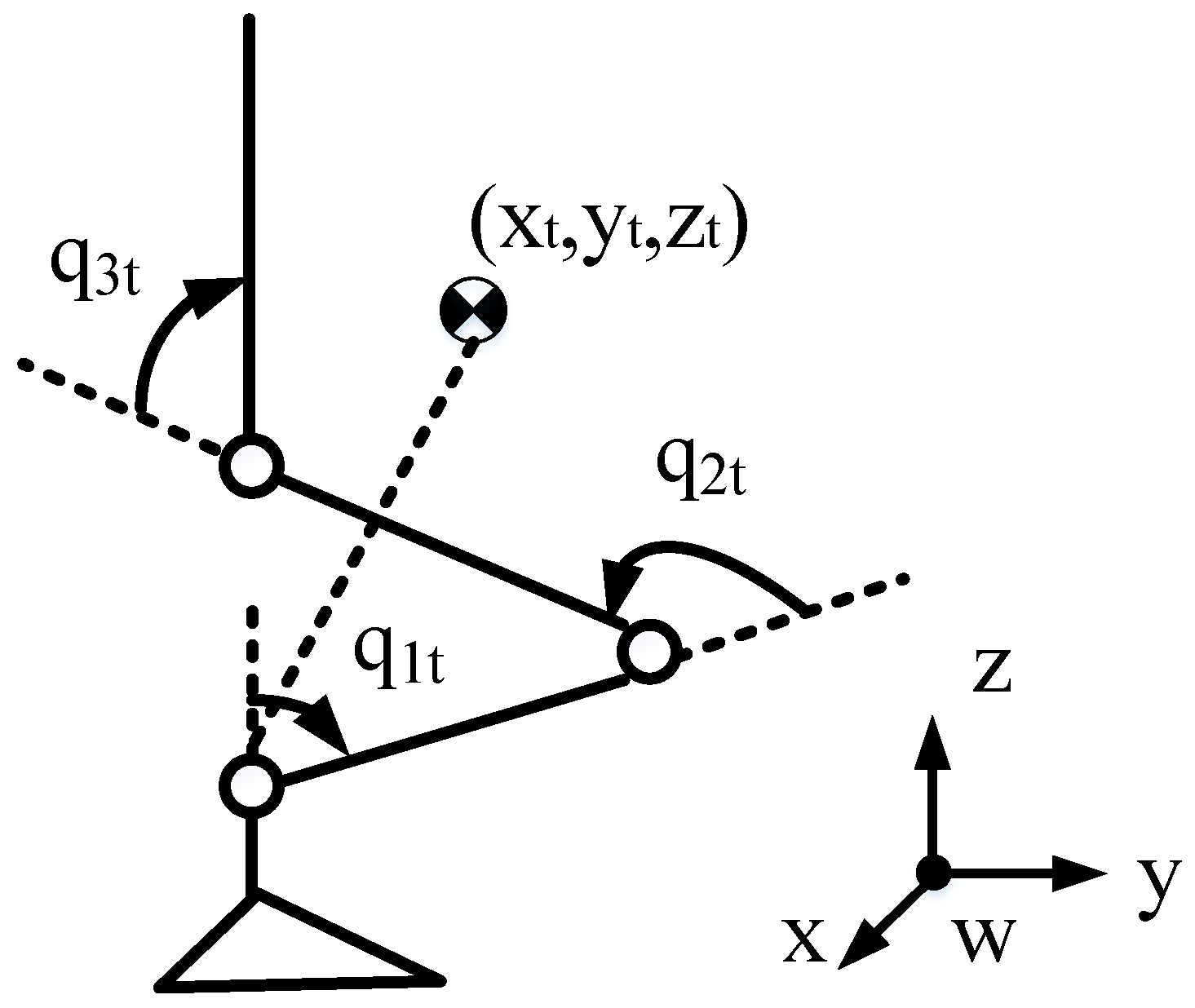
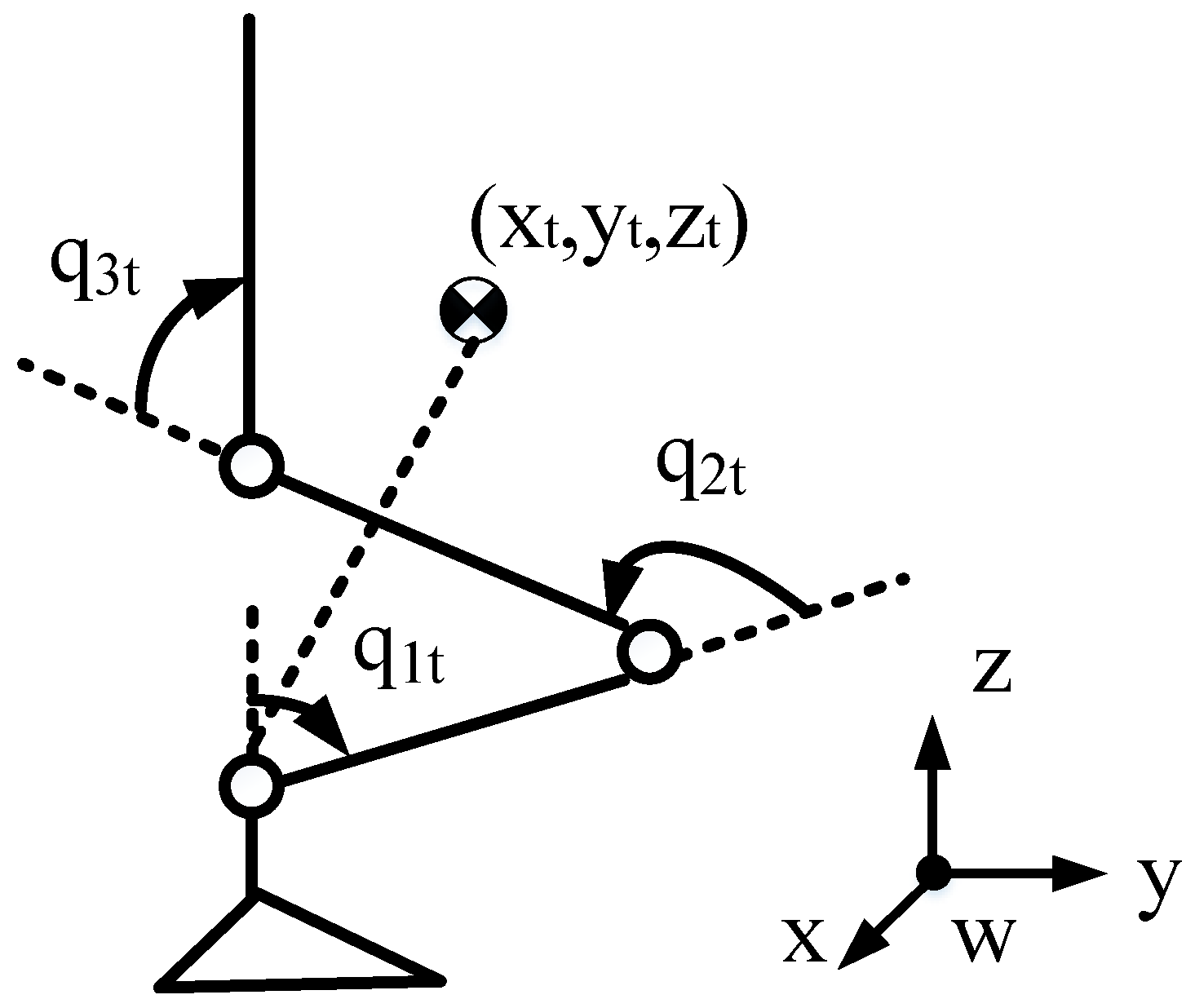
2.2. Mathematical Model
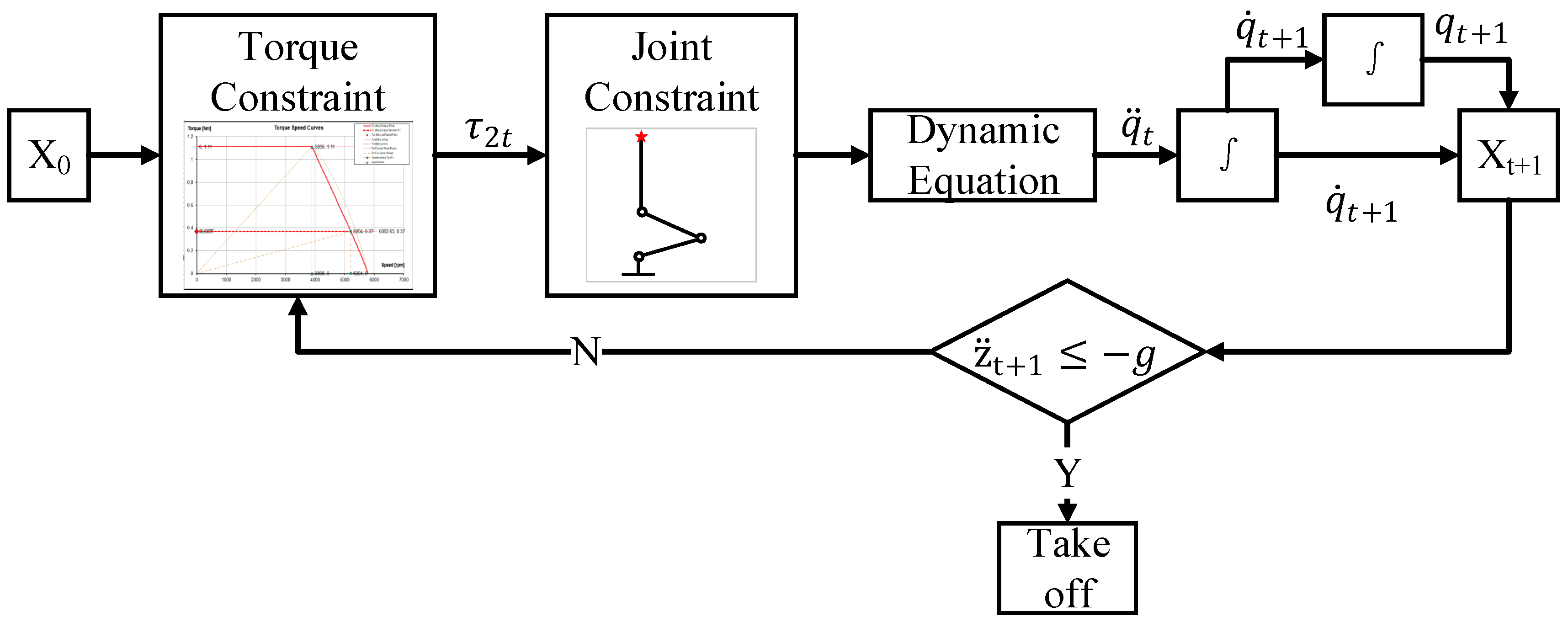
3. Method
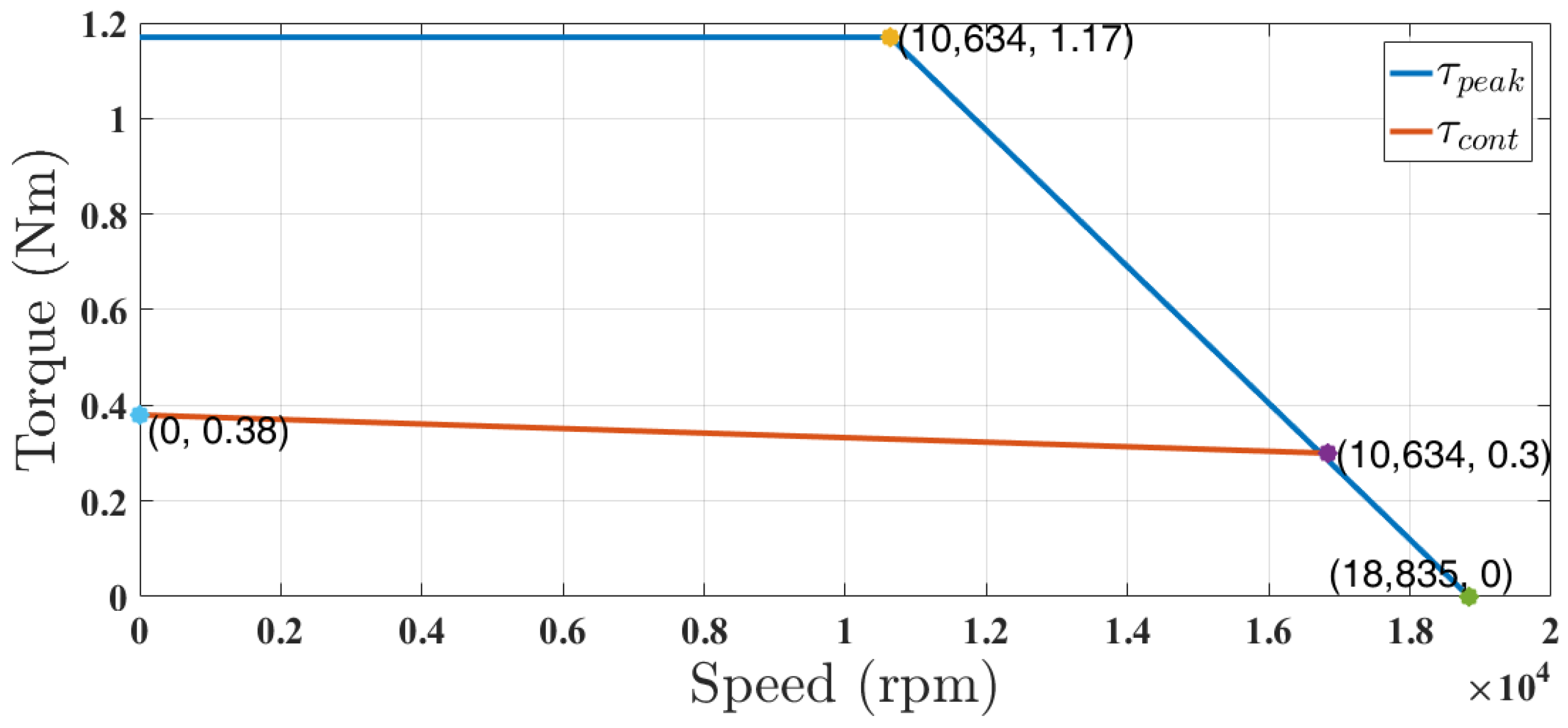
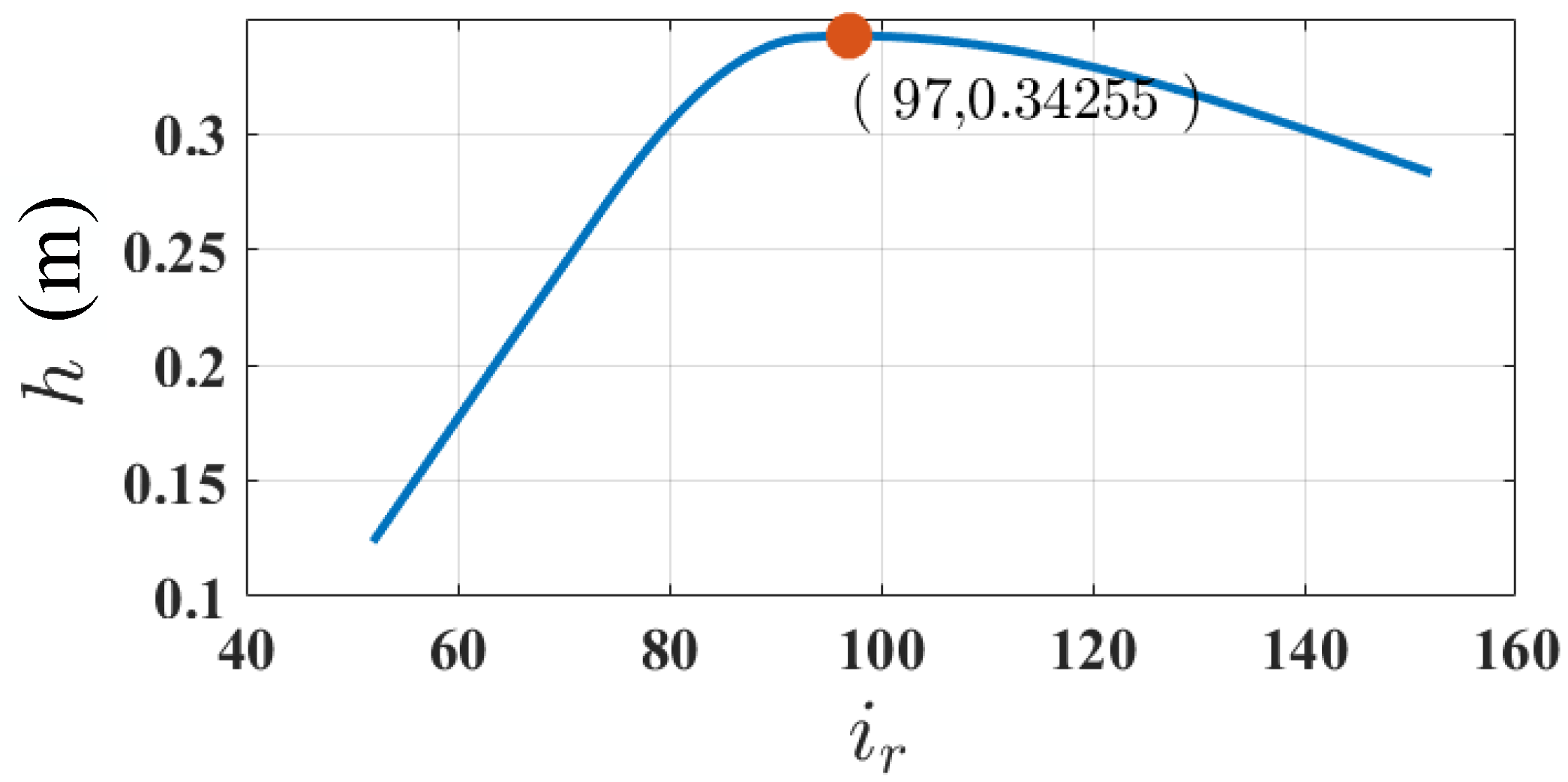
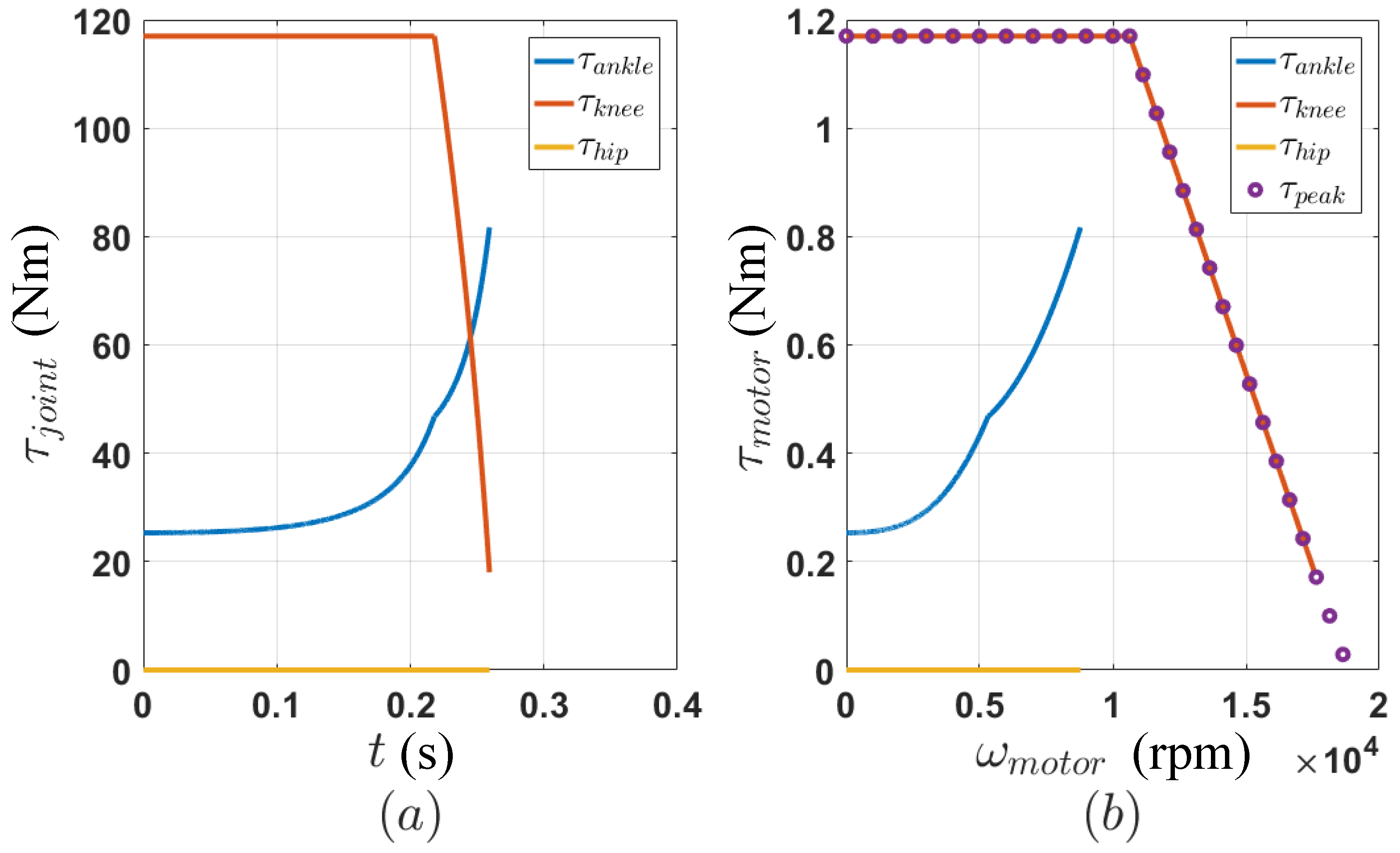
3.1. Selection of an Appropriate Reduction Ratio
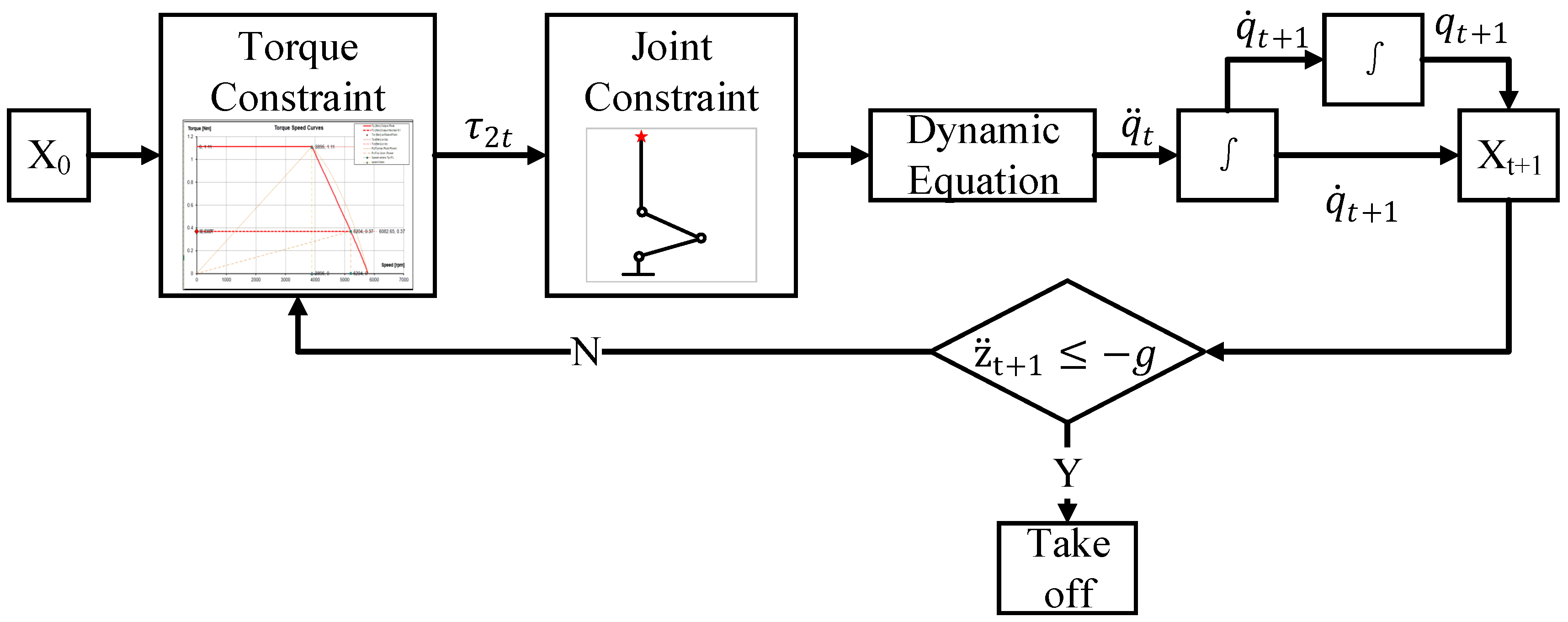
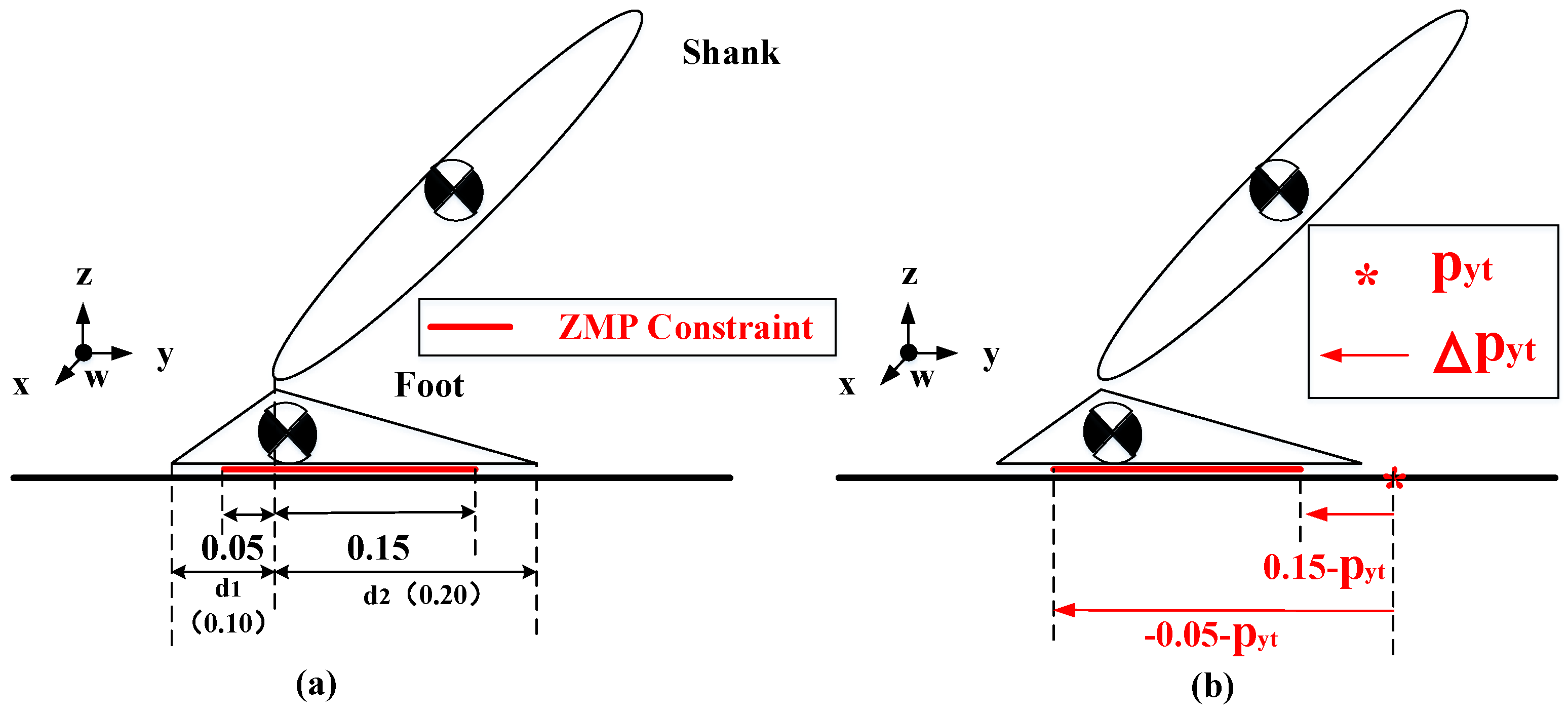
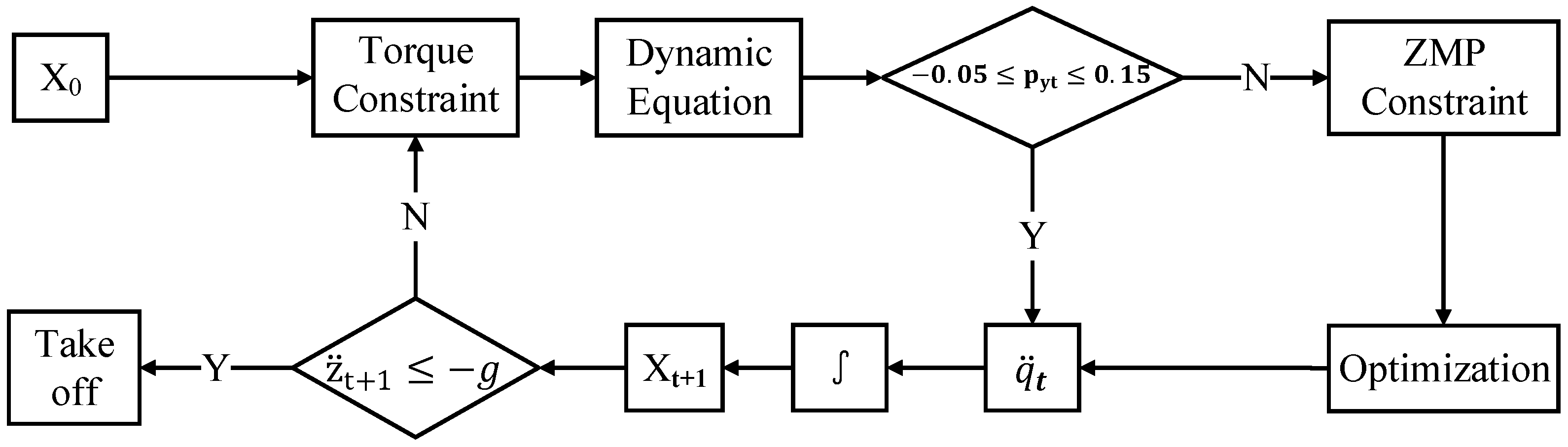
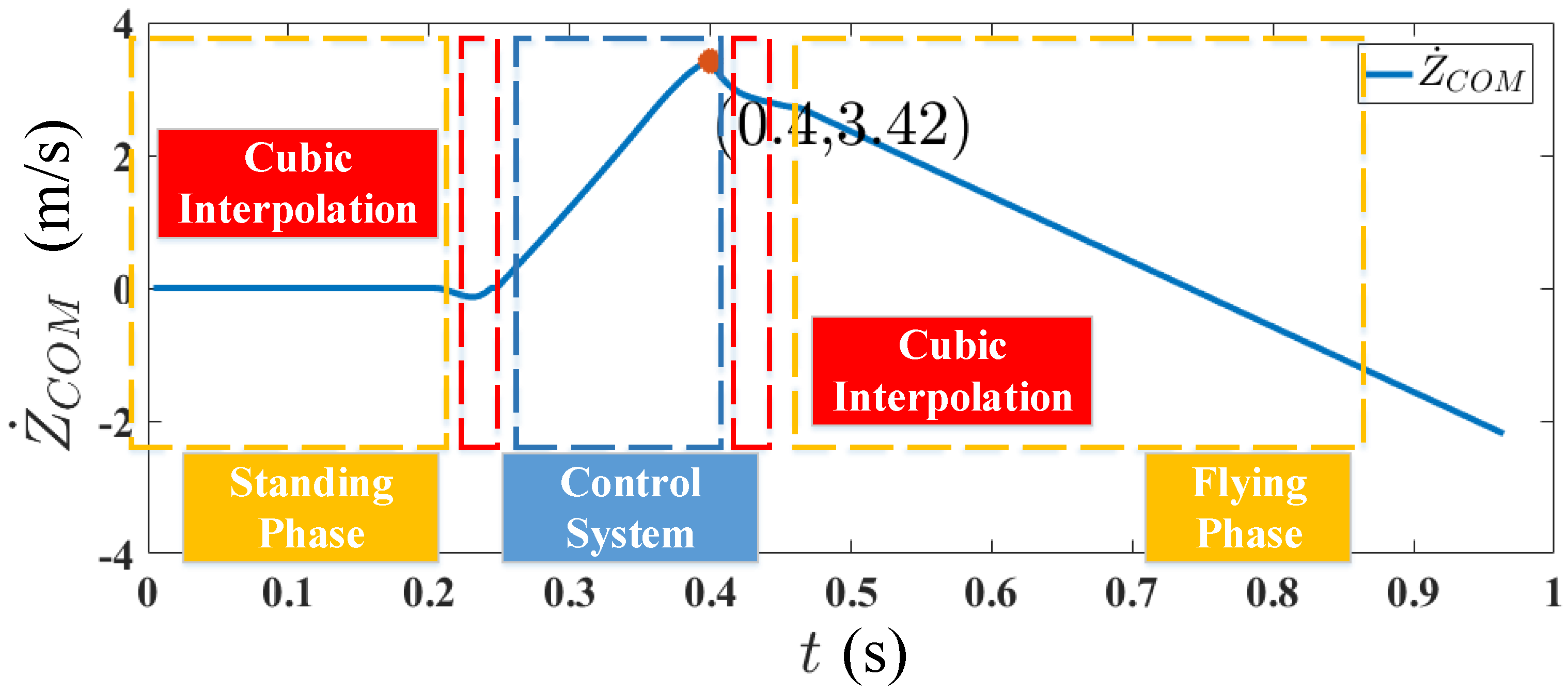
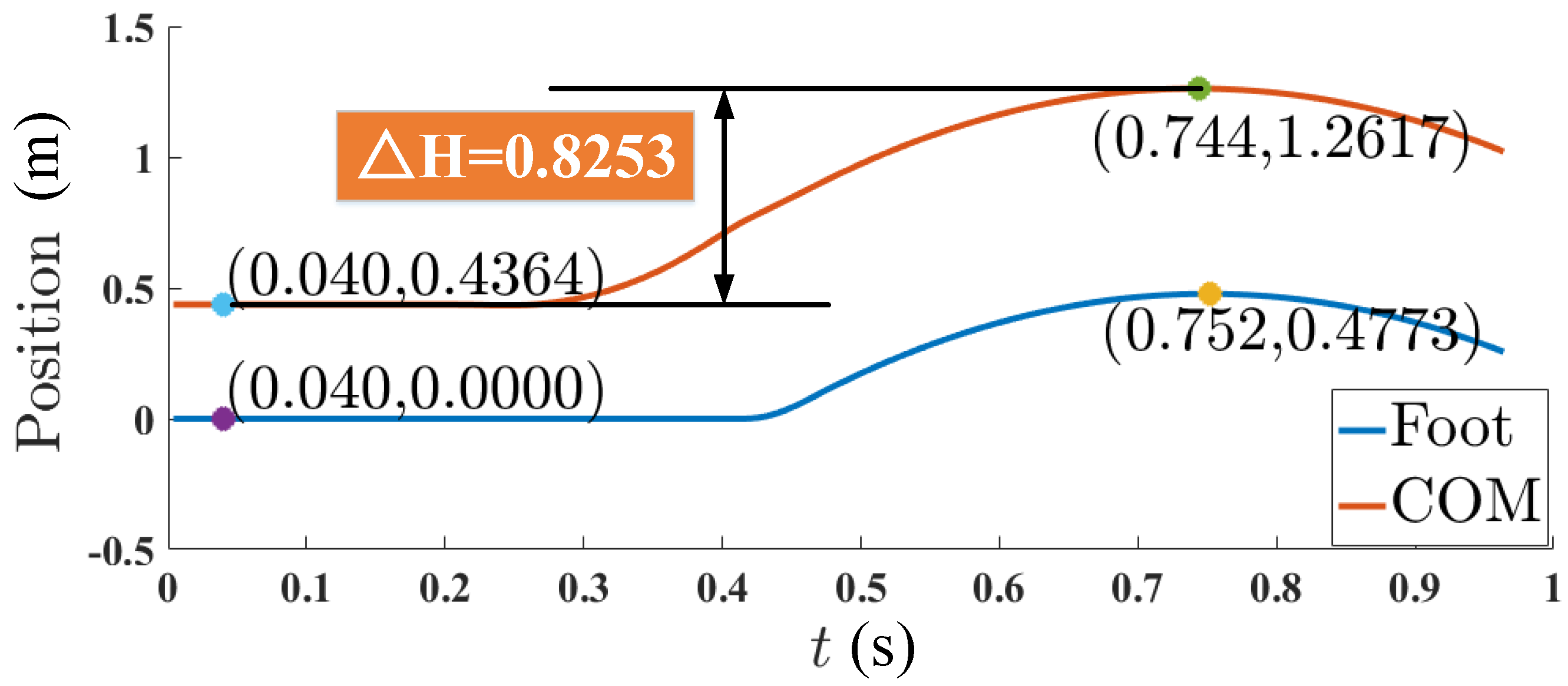
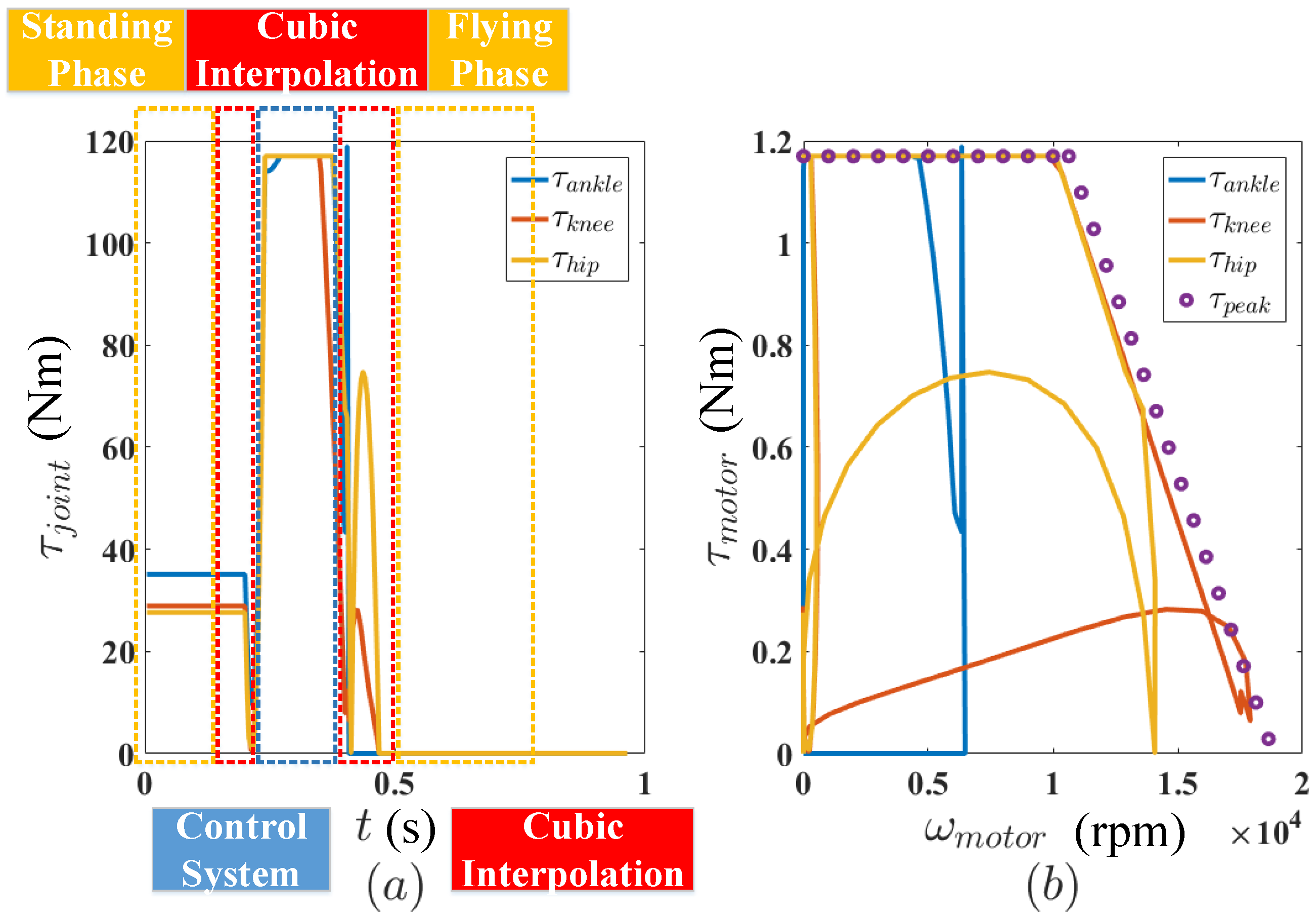
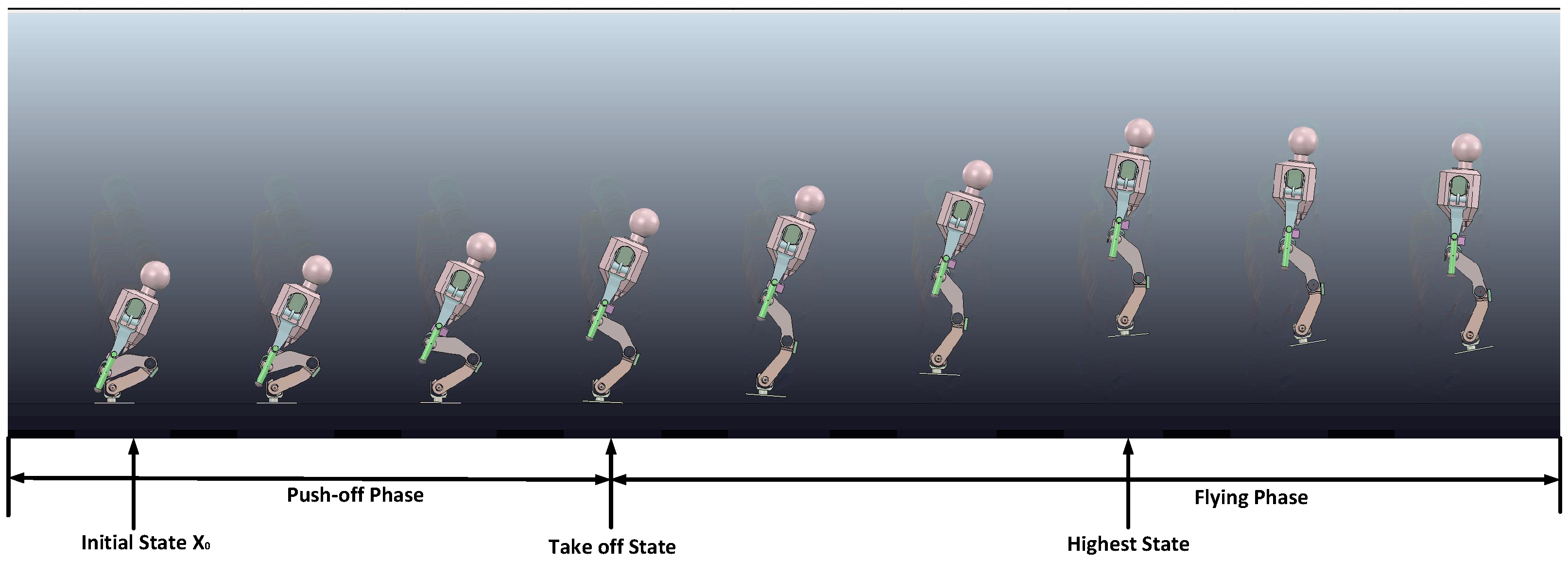
3.2. Motion Planning for Jumping Maneuver
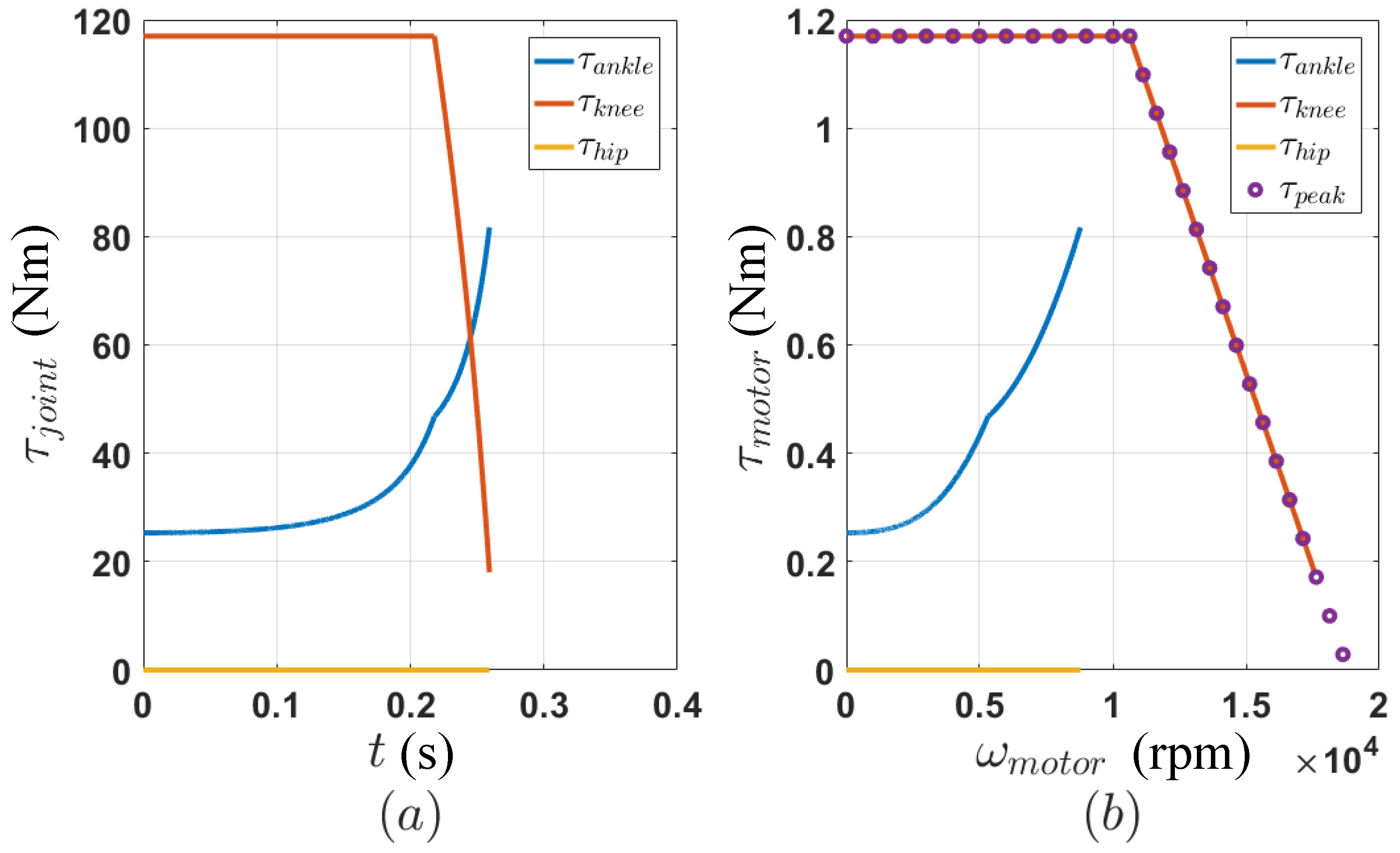
4. Simulation Results
5. Conclusions
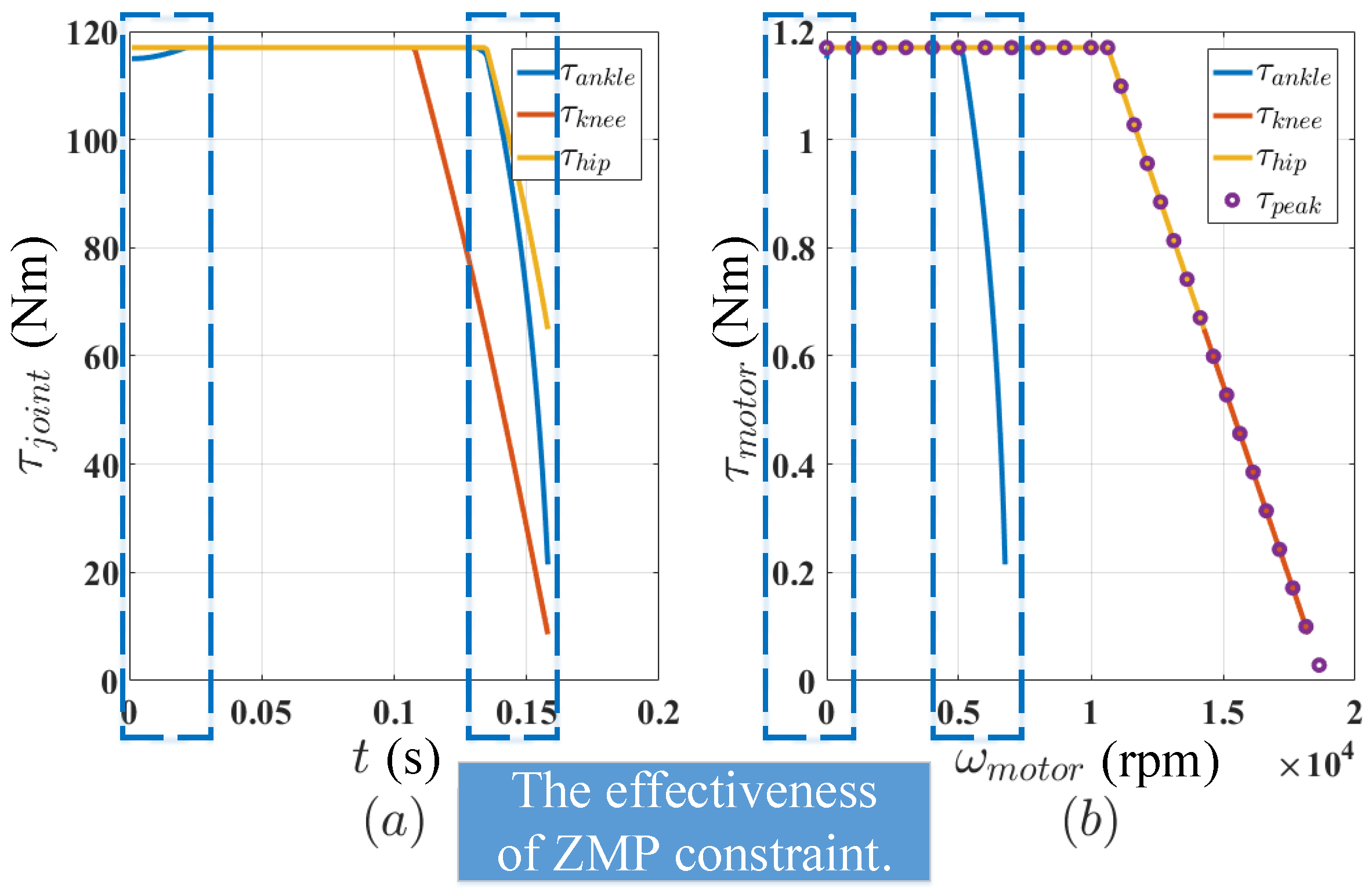
- In this paper, the efficiency of harmonic reducer is not considered. Thus, we have to calibrate the torque speed curve of the motor on a professional motor test platform, with and without reducer.
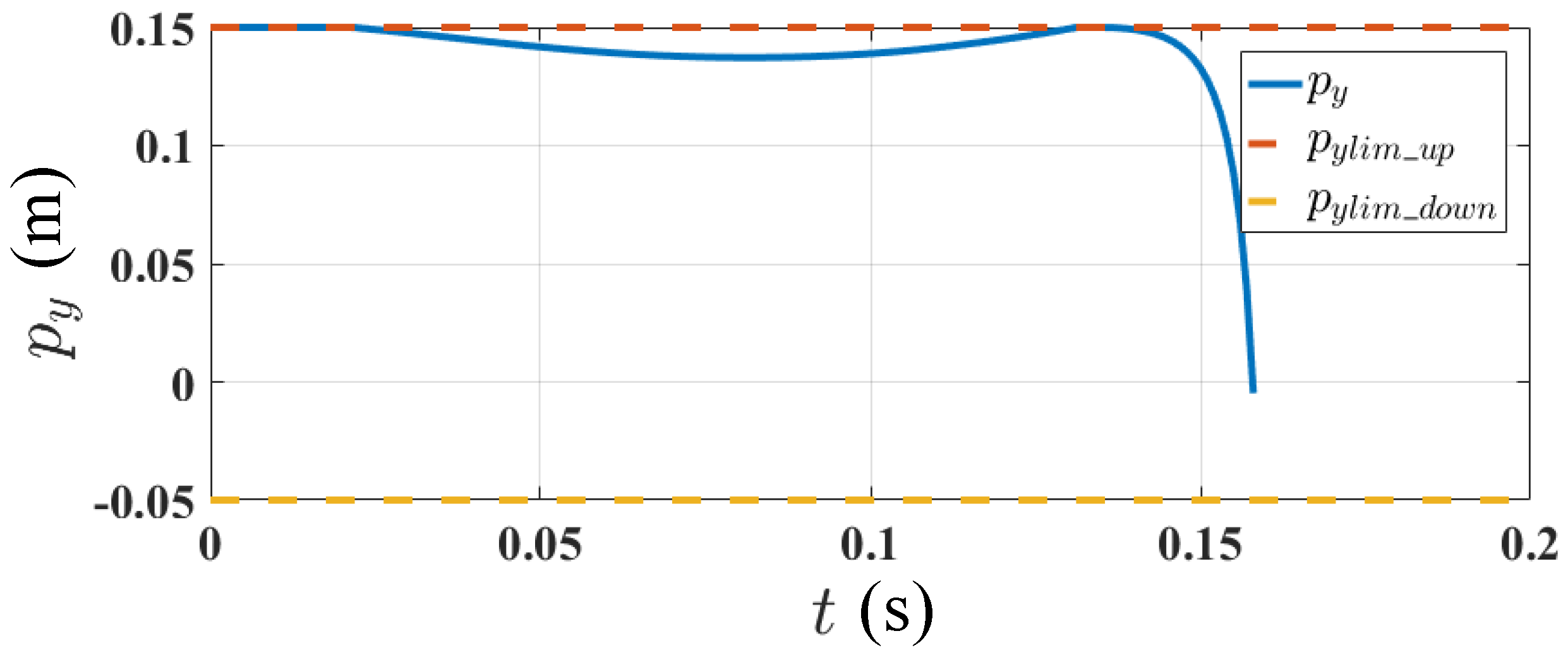
- While we can obtain an increased jump height based on the premise of the torque and ZMP constraints, how to reduce the impact force and maintain landing equilibrium during the landing phase remains a significant problem.
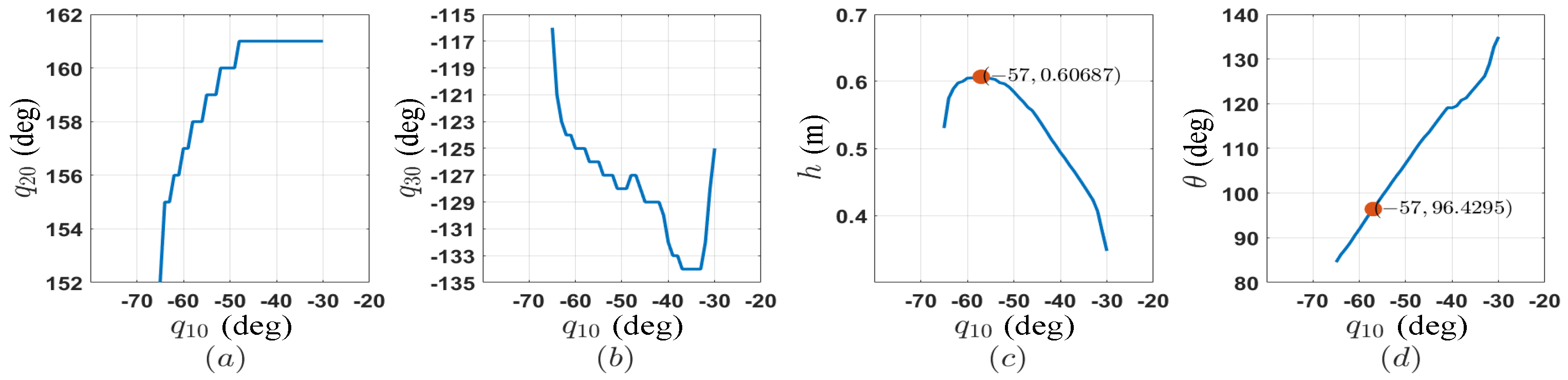
- We only found that the jump direction and the initial ankle angle have an almost linear relationship. However, this relationship alone is not sufficiently reliable to specify jumping direction.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Huang, Q.; Yokoi, K.; Kajita, S.; Kaneko, K.; Arai, H.; Koyachi, N.; Tanie, K. Planning walking patterns for a biped robot. IEEE Trans. Robot. Autom. 2001, 17, 280–289. [Google Scholar] [CrossRef]
- Huang, Q.; Kajita, S.; Koyachi, N.; Kaneko, K.; Yokoi, K.; Arai, H.; Komoriya, K.; Tanie, K. A high stability, smooth walking pattern for a biped robot. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999; Volume 1, pp. 65–71. [Google Scholar]
- Li, C.; Lowe, R.; Duran, B.; Ziemke, T. Humanoids that crawl: comparing gait performance of iCub and NAO using a CPG architecture. In Proceedings of the 2011 IEEE International Conference on Computer Science and Automation Engineering (CSAE), Shanghai, China, 10–12 June 2011; Volume 4, pp. 577–582. [Google Scholar]
- Kuehn, D.; Bernhard, F.; Burchardt, A.; Schilling, M.; Stark, T.; Zenzes, M.; Kirchner, F. Distributed computation in a quadrupedal robotic system. Int. J. Adv. Robotic. Syst. 2014, 11, 110. [Google Scholar] [CrossRef]
- Fujiwara, K.; Kanehiro, F.; Kajita, S.; Kaneko, K.; Yokoi, K.; Hirukawa, H. Falling motion control to minimize damage to biped humanoid robot. In Proceedings of the Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002. [Google Scholar]
- Fujiwara, K.; Kajita, S.; Harada, K.; Kaneko, K.; Morisawa, M.; Kanehiro, F.; Nakaoka, S.; Hirukawa, H. Towards an optimal falling motion for a humanoid robot. In Proceedings of the 6th IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 524–529. [Google Scholar]
- Kajita, S.; Nagasaki, T.; Kaneko, K.; Yokoi, K.; Tanie, K. A hop towards running humanoid biped. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 1, pp. 629–635. [Google Scholar]
- Sakka, S.; Yokoi, K. Humanoid vertical jumping based on force feedback and inertial forces optimization. In Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 3752–3757. [Google Scholar]
- Curran, S.; Orin, D.E. Evolution of a jump in an articulated leg with series-elastic actuation. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 352–358. [Google Scholar]
- Raibert, M.H.; Brown, H.B., Jr.; Chepponis, M. Experiments in balance with a 3D one-legged hopping machine. Int. J. Robot. Res. 1984, 3, 75–92. [Google Scholar] [CrossRef]
- Chen, X.; Zhangguo, Y.; Zhang, W.; Zheng, Y.; Huang, Q.; Ming, A. Bio-inspired Control of Walking with Toe-off, Heel-strike and Disturbance Rejection for a Biped Robot. IEEE Trans. Ind. Electron. 2017, 64, 7962–7971. [Google Scholar] [CrossRef]
- Yu, D.; Yu, Z.; Fang, X.; Lei, S.; Chen, X.; Huang, Q.; Meng, L.; Zhou, Q.; Zhang, W.; Han, J. Rolling motion generation of multi-points contact for a humanoid robot. In Proceedings of the International Conference on Advanced Robotics and Mechatronics (ICARM), Macau, China, 18–20 August 2016; pp. 153–158. [Google Scholar]
- Li, Q.; Chen, X.; Zhou, Y.; Yu, Z.; Zhang, W.; Huang, Q. A minimized falling damage method for humanoid robots. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417728016. [Google Scholar] [CrossRef]
- Raibert, M.H. Legged Robots That Balance; MIT Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Playter, R.R.; Raibert, M.H. Control of a Biped Somersault in 3D. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Raleigh, NC, USA, 7–10 July 1992; Volume 1, pp. 582–589. [Google Scholar]
- Vanderborght, B.; Van Ham, R.; Verrelst, B.; Van Damme, M.; Lefeber, D. Overview of the lucy project: Dynamic stabilization of a biped powered by pneumatic artificial muscles. Adv. Robot. 2008, 22, 1027–1051. [Google Scholar] [CrossRef]
- Hosoda, K.; Takuma, T.; Nakamoto, A.; Hayashi, S. Biped robot design powered by antagonistic pneumatic actuators for multi-modal locomotion. Robot. Autonom. Syst. 2008, 56, 46–53. [Google Scholar] [CrossRef]
- Ugurlu, B.; Saglia, J.A.; Tsagarakis, N.G.; Caldwell, D.G. Hopping at the resonance frequency: A trajectory generation technique for bipedal robots with elastic joints. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1436–1443. [Google Scholar]
- Okada, M.; Takeda, Y. Optimal design of nonlinear profile of gear ratio using non-circular gear for jumping robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1958–1963. [Google Scholar]
- Hondo, T.; Kinase, Y.; Mizuuchi, I. Jumping motion experiments on a NAO robot with elastic devices. In Proceedings of the 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids), Osaka, Japan, 29 November–1 December 2012; pp. 823–828. [Google Scholar]
- Guizzo, E. Japanese Humanoid Robot Can Keep Its Balance After Getting Kicked. Available online: https://spectrum.ieee.org/automaton/robotics/humanoids/japanese-high-power-humanoid-robot-hrp3l-jsk/ (accessed on 8 May 2012).
- Nunez, V.; Drakunov, S.; Nadjar-Gauthier, N.; Cadiou, J. Control strategy for planar vertical jump. In Proceedings of the 12th International Conference on Advanced Robotics, Seattle, WA, USA, 18–20 July 2005; pp. 849–855. [Google Scholar]
- Ugurlu, B.; Kawamura, A. Real-time running and jumping pattern generation for bipedal robots based on ZMP and Euler’s equations. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 1100–1105. [Google Scholar]
- Kajita, S.; Hirukawa, H.; Harada, K.; Yokoi, K. Introduction to Humanoid Robotics; Springer: Berlin, Germany, 2014; Volume 101. [Google Scholar]
- Hong, Y.D.; Lee, B. Evolutionary Optimization for Optimal Hopping of Humanoid Robots. IEEE Trans. Ind. Electron. 2017, 64, 1279–1283. [Google Scholar] [CrossRef]
- Takahide Yoshiike, M.K.; Ujino, R. Development of Experimental Legged Robot for Inspection and Disaster Response in Plants. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 4869–4876. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.5 (kg) | 5.0 (kg) | 5.0 (kg) | 15 (kg) | 0.12 (m) | 0.33 (m) | 0.33 (m) | 0.75 (m) | 0.30 (m) | 0.10 (m) | 0.20 (m) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, X.; Chen, X.; Yu, Z.; Zhang, W.; Meng, L.; Huang, Q. Motion Planning for Bipedal Robot to Perform Jump Maneuver. Appl. Sci. 2018, 8, 139. https://doi.org/10.3390/app8010139
Jiang X, Chen X, Yu Z, Zhang W, Meng L, Huang Q. Motion Planning for Bipedal Robot to Perform Jump Maneuver. Applied Sciences. 2018; 8(1):139. https://doi.org/10.3390/app8010139
Chicago/Turabian StyleJiang, Xinyang, Xuechao Chen, Zhangguo Yu, Weimin Zhang, Libo Meng, and Qiang Huang. 2018. "Motion Planning for Bipedal Robot to Perform Jump Maneuver" Applied Sciences 8, no. 1: 139. https://doi.org/10.3390/app8010139
APA StyleJiang, X., Chen, X., Yu, Z., Zhang, W., Meng, L., & Huang, Q. (2018). Motion Planning for Bipedal Robot to Perform Jump Maneuver. Applied Sciences, 8(1), 139. https://doi.org/10.3390/app8010139