Progress in Forward-Inverse Modeling Based on Radiative Transfer Tools for Coupled Atmosphere-Snow/Ice-Ocean Systems: A Review and Description of the AccuRT Model


Abstract
1. Introduction
Notation
- the absorption coefficient [m] by the letter ;
- the scattering coefficient [m] by the letter ;
- the extinction coefficient [m] by the letter ;
- the single-scattering albedo by ;
- the volume scattering function [msr] by and the related scattering phase function (dimensionless) by ;
- the scattering phase matrix (dimensionless) by in the Stokes vector representation and by in the Stokes vector representation .
2. Input and Output Parameters for the Forward Radiative Transfer Problem
2.1. Input Parameters
2.2. Output Parameters
3. Inherent Optical Properties (IOPs)
3.1. General Definitions
3.1.1. Rayleigh Scattering Phase Function
- , , 0.0957 and for for air, and
- , , , and for for water.
3.1.2. Henyey-Greenstein Scattering Phase Function
3.2. Scattering Phase Matrix
3.2.1. Stokes Vector Representation
3.2.2. Stokes Vector Representation
3.2.3. Generalized Spherical Functions—The “Greek Constants”
3.3. IOPs for a Size Distribution of Particles
IOPs for a Mixture of Different Particle Types
3.4. Atmosphere IOPs
3.4.1. Gases in the Earth’s Atmosphere
3.4.2. Aerosol IOPs
Relationship between Effective Radius and Mode Radius
Impact of Relative Humidity
3.4.3. Cloud IOPs
3.5. Snow and Ice IOPs
3.5.1. General Approach
3.5.2. Fast, yet Accurate Parameterization of Snow/Ice IOPs
- The particle distribution is characterized by an effective radius [Equation (70)], which obviates the need for an integration over r.
- The particles are weakly absorbing, so that [51]where is the imaginary part of the refractive index of the particle, is the wavelength in vacuum, and is the ratio of the real part of the refractive index of the particle () to that of the surrounding medium ().
- The particles are large compared to the wavelength () which implies
3.5.3. Impurities, Air Bubbles, Brine Pockets, and Snow
3.6. Ocean IOPs—Bio-Optical Models
3.6.1. The CCRR Water Impurity IOPs
Mineral Particle IOPs
Algae Particle IOPs
CDOM IOPs
Scattering Phase Function for Particles
3.6.2. The SBC and GSM Bio-Optical Models
4. Radiative Transfer in Coupled Atmosphere-Water (Including Snow/ice) Systems
4.1. Radiative Transfer Equation—Unpolarized Radiation
4.1.1. Isolation of Azimuth Dependence
4.1.2. The Interface between the Two Slabs—Calm (Flat) Water Surface
4.1.3. A Wind-Blown (Rough) Air-Water Interface—Pseudo-Two-Dimensional BRDF Treatment
A Pseudo Two-Dimensional (Wind-Direction Dependent) Treatment of the BRDF
4.2. Radiative Transfer Equation—Polarized Radiation
Isolation of Azimuth Dependence
- the homogeneous version of Equations (147) and (148) with yields a linear combination of exponential solutions (with unknown coefficients) obtained by solving an algebraic eigenvalue problem;
- analytic particular solutions are found by solving a system of linear algebraic equations;
- the general solution is obtained by adding the homogeneous and particular solutions;
- the solution is completed by imposing boundary conditions at the top of the atmosphere and the bottom of the water;
- the solutions are required to satisfy continuity conditions across layer interfaces in the atmosphere and the water, and last but not least to satisfy Fresnel’s equations and Snell’s law at the atmosphere-water interface, where there is an abrupt change in the refractive index;
- the application of boundary, layer interface, and atmosphere-water interface conditions leads to a sparse system of linear algebraic equations, and the numerical solution of this system of equations yields the unknown coefficients in the homogenous solutions.
4.3. Summary of AccuRT
- irradiances and mean radiances (scalar irradiances) at desired vertical positions in the coupled system;
- total radiances and polarized radiances (including degree of polarization) in desired directions and vertical positions in the coupled system.
5. Examples of Forward-Inverse Modeling
5.1. Introduction
5.2. Bidirectional Reflectance of Water—Why Is It Important?
- correct interpretation of ocean color data;
- comparing consistency of spectral radiance data derived from space observations with a single instrument for a variety of illumination and viewing conditions;
- merging data collected by different instruments operating simultaneously.
- The generally anisotropic remote sensing reflectance of oceanic water must be corrected in remote sensing applications that make use of the nadir water-leaving radiance (or remote sensing reflectance) to derive ocean color products.
- The standard MAG02 correction method [63], based on the open ocean assumption, is unsuitable for turbid waters, such as rivers, lakes, and coastal water. The MAG02 method requires the chlorophyll concentration as an input, which is a drawback in remote sensing applications, because the chlorophyll concentration is generally produced from the corrected remote sensing reflectance.
- To meet the need for a correction method that works for water that may be dominated by turbidity or CDOM, Fan et al. [95] developed a neural network method that directly converts the remote sensing reflectance from the slant-viewing to the nadir-viewing direction.
- The neural network was trained using remote sensing reflectances at slant and nadir directions generated by a radiative transfer model (AccuRT), in which scattering phase functions for algal and non-algal particles were adopted. Therefore, the remote sensing reflectance implicitly contains information about the shape of the scattering phase function which affects the BRDF.
- This method uses spectral remote sensing reflectances as input. Hence, it does not require any prior knowledge of the water constituents or their optical properties.
- Tests based on synthetic data show that this method is sound and accurate. Validation using field measurements [96] shows that this neural network method works equally well compared to the standard method [63] for open ocean or chlorophyll-dominated water. For turbid coastal water a significant improvement over the standard method was found, especially for water dominated by sediment particles.
5.3. Sunglint: A Nuisance or Can Can It Be Used to Our Advantage?
5.3.1. BRDF Measurements
NASA CAR Instrument
5.3.2. Radiative Transfer Simulations
Atmospheric Input & Output
5.3.3. Comparison between Measured and Simulated Reflectances
Retrieval Surface Roughness and Aerosol Parameters
5.3.4. Summary of Glint Issues
- A wind-direction dependent Gaussian surface BRDF that uses (1) a 2D slope distribution for singly scattered light, and (2) a 1D slope distribution for multiply scattered light, can be used to successfully simulate BRDF measurements obtained by NASA’s Cloud Absorption Radiometer (CAR) at the 1036 nm wavelength.
- Upwind and crosswind slope variances, wind direction, and aerosol optical depth, can be accurately retrieved through forward-inverse modeling.
- The glint parameters (slope variances and wind direction) can be applied to estimate the glint contribution at visible and NIR wavelengths, resulting in a very good match between model-simulated and measured reflectances.
- An advantage of RT simulations of glint reflectance is its inclusion of contributions from the diffuse or multiply scattered light due to scattering by atmospheric molecules and aerosols. The diffuse light reflectance (“skyglint”) gives an additional glint signal in addition to “sunglint” resulting from the direct beam reflectance.
- Simulations show that the diffuse glint may contribute more than at 472 nm for a wind speed of 2 m/s, and more than when the wind speed increases to 8 m/s. Hence, the diffuse light reflectance should be considered in the visible bands, especially for large wind speeds.
- A simplified version of the pseudo 2D BRDF and glint reflectance method described above has been implemented in the AccuRT model for the coupled atmosphere-ocean system.
5.4. Retrievals of Atmosphere-Water Parameters from Geostationary Platforms: Challenges and Opportunities
- (i) the complexity of the atmosphere and water inherent optical properties,
- (ii) the unique bidirectional dependence of the water-leaving radiance, and
- (iii) the desire to do retrievals for large solar zenith and viewing angles.
- atmospheric gaseous absorption, absorbing aerosols, and turbid waters can be addressed by using a coupled forward model in the retrieval process,
- corrections for bidirectional effects will be accomplished,
- the curvature of the atmosphere will be taken into account, and
- uncertainty assessments and error budgets will be dealt with.
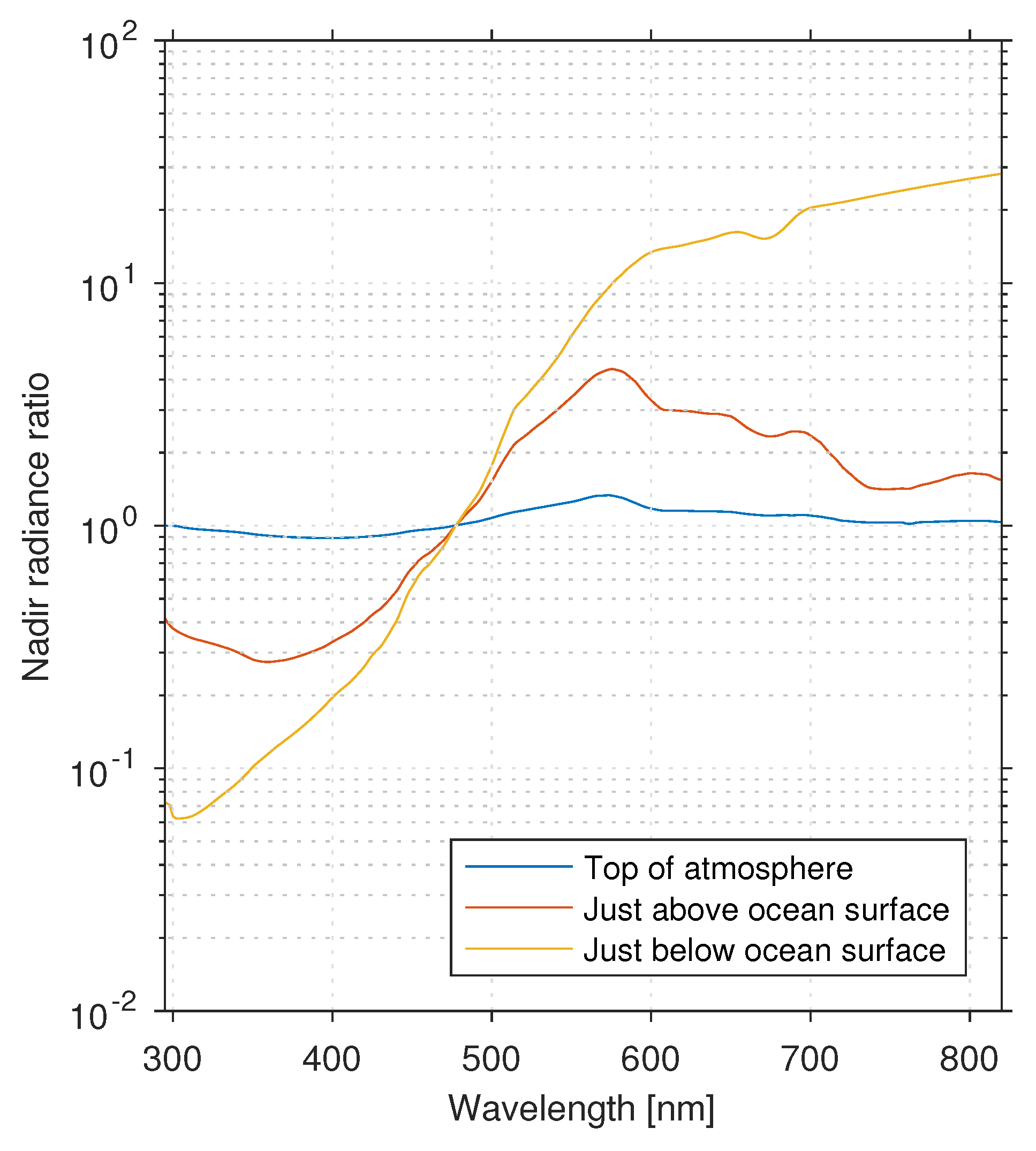
- there is a significant change in sub-surface color with increasing chlorophyll concentration, while at the same time
- there is only a slight change in color at the TOA, where the spectra are dominated by light from atmospheric scattering.
- First, one does an “atmospheric correction” (assuming the water to be black at NIR wavelengths) to determined the water-leaving radiance.
- Second, one retrieves the desired aquatic parameters from the water-leaving radiance.
- Atmospheric correction becomes a very challenging task unless the near-infrared (NIR) black-pixel approximation (BPA) is valid.
- Estimation of diffuse transmittance is also important, but difficult because it depends on the angular distribution of the radiance just beneath the water surface.
- a small uncertainty in the atmospheric correction may lead to a big error in the inferred aquatic parameters, and
- aerosol optical properties vary considerably in space and time.
5.4.1. The OC-SMART Optimal Estimation Approach
- AccuRT: accurate discrete-ordinates radiative transfer model for the coupled atmosphere-ocean system; delivers a complete set of simulated radiances and Jacobians (weighting functions).
- OE/LM inversion: is an iterative, nonlinear least squares cost function minimization with a priori and Levenberg-Marquardt regularization.
- For retrievals of aerosol and aquatic parameters from Ocean Color data, we define a 5-element state vector:consisting of
- -
- 2 aerosol parameters ( optical depth at 865 nm and bimodal fraction of particles),
- -
- 3 marine parameters (chlorophyll concentration, CHL, combined absorption by detrital and dissolved material at 443 nm, CDM, and backscattering coefficient at 443 nm, BBP).
5.4.2. The OC-SMART Multilayer Neural Network Approach
- It significantly improved the quality of retrieved remote sensing reflectances (compared to the SeaDAS NIR algorithm) by reducing the average percentage difference (APD) between MODIS retrievals and ground-truth (AERONET-OC) validation data.
- In highly absorbing coastal water, such as the Baltic Sea, it provides reduction of the APD by more than 60%, and in highly scattering water, such as the Black Sea, it provides reduction of the APD by more than 25%.
- It is robust and resilient to contamination due to sunglint and adjacency effects of land and cloud edges.
- It is applicable in extreme conditions such as those encountered for heavily polluted continental aerosols, extreme turbid water, and dust storms.
- It does not require shortwave infrared (SWIR) bands, and is therefore suitable for all ocean color sensors.
- It is very fast and suitable for operational use.
5.4.3. Issues Specific to Geostationary Platforms
Low Solar Elevations
Surface Roughness Considerations
- a 2D Gaussian surface slope distribution for singly scattered light, and
- a 1D Gaussian surface slope distribution for multiply scattered light.
Use of Vector (Polarized) RT Simulations
- polarized (vector) radiative transfer simulations,
- a 2D Gaussian distribution of surface slopes,
- simultaneous retrieval of atmospheric and marine parameters from multi-spectral as well as hyperspectral measurements of total and polarized (if available) radiances, and
- assessments of retrieval accuracy and error budgets.
6. Remaining Problems
6.1. 3-D Radiative Transfer: The LiDAR Problem
6.2. Time-Dependent Radiative Transfer
6.3. Other Issues
7. Summary
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ricchiazzi, P.; Yang, S.; Gautier, C.; Sowle, D. SBDART: A research and teaching software tool for plane-parallel radiative transfer in the Earth’s atmosphere. Bull. Am. Meteorol. Soc. 1998, 79, 2101–2114. [Google Scholar] [CrossRef]
- Key, J.R.; Schweiger, A.J. Tools for atmospheric radiative transfer: Streamer and FluxNet. Comput. Geosci. 1998, 24, 443–451. [Google Scholar] [CrossRef]
- Stamnes, K.; Stamnes, J.J. Radiative Transfer in Coupled Environmental Systems; Wiley-VCH: Weinheim, Germany, 2015. [Google Scholar]
- Mobley, C.D. Light and Water; Academic Press: Cambridge, MA, USA, 1994. [Google Scholar]
- Hovenier, J.W.; der Mee, C.D.V.; Domke, H. Transfer of Polarized Light in Planetary Atmospheres; Kluwer Academic Publsihers: Dordrecht, The Netherlands, 2004. [Google Scholar]
- Rayleigh, L. A re-examination of the light scattered by gases in respect of polarization. II. Experiments on helium and argon. Proc. R. Soc. 1920, 98, 57–64. [Google Scholar] [CrossRef]
- Morel, A. Optical properties of pure water and pure seawater. In Optical Aspects of Oceanography; Jerlov, N.G., Nielsen, E.S., Eds.; Academic Press: Cambridge, MA, USA, 1974; pp. 1–24. [Google Scholar]
- Morel, A.; Gentili, B. Diffuse reflectance of oceanic waters: its dependence on sun angle as influenced by the molecular scattering contribution. Appl. Opt. 1991, 30, 4427–4437. [Google Scholar] [CrossRef] [PubMed]
- Rayleigh, L. On the light from the sky, its polarization and colour. Philos. Mag. 1871, 41, 107–120, 274–279, 447–454. [Google Scholar]
- Bodhaine, B.; Wood, N.; Dutton, E.; Slusser, J. On Rayleigh optical depth calculations. J. Atmos. Ocean. Technol. 1999, 16, 1854–1861. [Google Scholar] [CrossRef]
- Farinato, R.S.; Rowell, R.L. New values of the light scattering depolarization and anisotropy of water. J. Chem. Phys. 1976, 65, 593–595. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, L. Estimating scattering of pure water from density fluctuation of the refractive index. Opt. Express 2009, 17, 1671–1678. [Google Scholar] [CrossRef] [PubMed]
- Henyey, L.C.; Greenstein, J.L. Diffuse radiation in the galaxy. Astrophys. J. 1941, 93, 70–83. [Google Scholar] [CrossRef]
- Stamnes, K.; Thomas, G.E.; Stamnes, J.J. Radiative Transfer in the Atmosphere and Ocean, 2nd ed.; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Hovenier, J.W.; van der Mee, C.V.M. Fundamental relationships relevant to the transfer of polarized light in a scattering atmosphere. Astron. Astrophys. 1983, 128, 1–16. [Google Scholar]
- Chandrasekhar, S. Radiative Transfer; Dover Publications: Mineola, NY, USA, 1960. [Google Scholar]
- De Haan, J.; Bosma, P.; Hovenier, J. The adding method for multiple scattering calculations of polarized light. Astron. Astrophys. 1987, 183, 371–391. [Google Scholar]
- Siewert, C. A discrete-ordinates solution for radiative-transfer models that include polarization effects. J. Quant. Spectrosc. Radiat. Transf. 2000, 64, 227–254. [Google Scholar] [CrossRef]
- Cohen, D.; Stamnes, S.; Tanikawa, T.; Sommersten, E.R.; Stamnes, J.J.; Lotsberg, J.K.; Stamnes, K. Comparison of Discrete Ordinate and Monte Carlo Simulations of Polarized Radiative Transfer in two Coupled Slabs with Different Refractive Indices. Opt. Express 2013, 21, 9592–9614. [Google Scholar] [CrossRef] [PubMed]
- Siewert, C.E. On the equation of transfer relevant to the scattering of polarized light. Astrophys. J. 1981, 245, 1080–1086. [Google Scholar] [CrossRef]
- Siewert, C.E. On the phase matrix basic to the scattering of polarized light. Astron. Astrophys. 1982, 109, 195–200. [Google Scholar]
- Sommersten, E.R.; Lotsberg, J.K.; Stamnes, K.; Stamnes, J.J. Discrete ordinate and Monte Carlo simulations for polarized radiative transfer in a coupled system consisting of two media with different refractive indices. J. Quant. Spectrosc. Radiat. Transf. 2010, 111, 616–633. [Google Scholar] [CrossRef]
- Mishchenko, M.I. Light scattering by randomly oriented rotationally symmetric particles. J. Opt. Soc. Am. A 1991, 8, 871–882. [Google Scholar] [CrossRef]
- Mishchenko, M.I.; Travis, L.D. Satellite retrieval of aerosol properties over the ocean using polarization as well as intensity of reflected sunlight. J. Geophys. Res. 1997, 102, 16989–17013. [Google Scholar] [CrossRef]
- Anderson, G.P.; Clough, S.A.; Kneizys, F.X.; Chetwynd, J.H.; Shettle, E.P. AFGL Atmospheric Constituent Profiles (0–120 km), AFGL-TR-86-0110 (OPI); Optical Physics Division, Air Force Geophysics Laboratory Hanscom AFB: Bedford, MA, USA, 1986. [Google Scholar]
- Berk, A.; Anderson, G.P.; Acharya, P.K.; Bernstein, L.S.; Muratov, L.; Lee, J.; Fox, M.; Adler-Golden, S.M.; Chetwynd, J.H.; Hoke, M.L.; et al. MODTRAN 5: A Reformulated Atmospheric Band Model with Auxiliary Species and Practical Multiple Scattering Options: Update; Defense and Security, International Society for Optics and Photonics: Orlando, FL, USA, 2005; pp. 662–667. [Google Scholar]
- Berk, A.; Conforti, P.; Kennett, R.; Perkins, T.; Hawes, F.; van den Bosch, J. MODTRAN6: A Major Upgrade of the MODTRAN Radiative Transfer Code; SPIE Defense+ Security, International Society for Optics and Photonics: Orlando, FL, USA, 2014; p. 90880H. [Google Scholar]
- Kneizys, F.X.; Abreu, L.W.; Anderson, G.; Chetwynd, J.; Shettle, E.; Berk, A.; Bernstein, L.; Roberson, D.; Acharya, P.; Rothman, L.; et al. MODTRAN2/3 Report and LOWTRAN 7 Model; Technical Report; Phillips Laboratory, Hanscom AFB: Bedford, MA, USA, 1996. [Google Scholar]
- Chen, N.; Li, W.; Tanikawa, T.; Hori, M.; Shimada, R.; Aoki, T.; Stamnes, K. Fast yet accurate computation of radiances in shortwave infrared satellite remote sensing channels. Opt. Express 2017, 25, A649–A664. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, Z.; Franz, B.A.; McClain, C.R.; Kwiatkowska, E.J.; Werdell, J.; Shettle, E.P.; Holben, B.N. New aerosol models for the retrieval of aerosol optical thickness and normalized water-leaving radiances from the SeaWiFS and MODIS sensors over coastal regions and open oceans. Appl. Opt. 2010, 49, 5545–5560. [Google Scholar] [CrossRef] [PubMed]
- Hess, M.; Koepke, P.; Schult, I. Optical properties of aerosols and clouds: The software package OPAC. Bull. Am. Met. Soc. 1998, 79, 831–844. [Google Scholar] [CrossRef]
- Davies, C.N. Size distribution of atmospheric particles. J. Aerosol Sci. 1974, 5, 293–300. [Google Scholar] [CrossRef]
- Holben, B.N.; Eck, T.F.; Slutsker, I.; Tanre, D.; Buis, J.P.; Setzer, A.; Vermote, E.; Reagan, J.A.; Kaufman, Y.; Nakajima, T.; et al. AERONET—A federated instrument network and data archive for aerosol characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Holben, B.N.; Tanre, D.; Smirnov, A.; Eck, T.F.; Slutsker, I.; Abuhassan, N.; Newcomb, W.W.; Schafer, J.; Chatenet, B.; Lavenue, F.; et al. An emerging ground-based aerosol climatology: aerosol optical depth from AERONET. J. Geophys. Res. 2001, 106, 12067–12097. [Google Scholar] [CrossRef]
- Hansen, J.E.; Travis, L.D. Light scattering in planetary atmospheres. Space Sci. Rev. 1974, 16, 527–610. [Google Scholar] [CrossRef]
- Hänel, G. The properties of atmospheric aerosol particles as functions of the relative humidity at thermodynamic equilibrium with the surrounding moist air. In Advances in Geophysics; Landsberg, H.E., Miehem, J.V., Eds.; Elsevier: New York, NY, USA, 1976; Volume 19. [Google Scholar]
- Shettle, E.P.; Fenn, R.W. Models for the Aerosols of the Lower Atmosphere and the Effects of Humidity Variations on their Optical Properties; Air Force Geophysics Laboratory, Hanscomb AFB: Bedford, MA, USA, 1979. [Google Scholar]
- Yan, B.; Stamnes, K.; Li, W.; Chen, B.; Stamnes, J.J.; Tsay, S.C. Pitfalls in atmospheric correction of ocean color imagery: How should aerosol optical properties be computed? Appl. Opt. 2002, 41, 412–423. [Google Scholar] [CrossRef] [PubMed]
- Du, H. Mie-scattering calculation. Appl. Opt. 2004, 43, 1951–1956. [Google Scholar] [CrossRef] [PubMed]
- Wendisch, M.; Yang, P. Theory of Atmospheric Radiative Transfer; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Segelstein, D.J. The Complex Refractive Index of Water. Mater’s Thesis, Department of Physics, University of Missouri, Kansas City, MO, USA, 1981. [Google Scholar]
- Smith, R.C.; Baker, K.S. Optical properties of the clearest natural waters (200–800 nm). Appl. Opt. 1981, 36, 177–184. [Google Scholar] [CrossRef] [PubMed]
- Sogandares, F.M.; Fry, E.S. Absorption spectrum (340–640 nm) off pure water. I. Photothermal measurements. Appl. Opt. 1997, 36, 8699–8709. [Google Scholar] [CrossRef] [PubMed]
- Pope, R.M.; Fry, E.S. Absorption spectrum (380–700 nm) of pure water, II Integrating cavity measurements. Appl. Opt. 1997, 36, 8710–8723. [Google Scholar] [CrossRef] [PubMed]
- Kou, L.; Labrie, D.; Chylek, P. Refractive indices of water and ice in the 0.65 μm to 2.5 μm spectral range. Appl. Opt. 1993, 32, 3531–3540. [Google Scholar] [CrossRef] [PubMed]
- Wiscombe, W.J.; Warren, S.G. A Model for the Spectral Albedo of Snow. I: Pure Snow. J. Atmos. Sci. 1980, 37, 2712–2733. [Google Scholar] [CrossRef]
- Warren, S.G.; Wiscombe, W.J. A Model for the Spectral Albedo of Snow. II: Snow Containing Atmospheric Aerosols. J. Atmos. Sci. 1980, 37, 2734–2745. [Google Scholar] [CrossRef]
- Grenfell, T.S.; Warren, S.G.; Mullen, P.C. Reflection of solar radiation by the Antarctic snow surface at ultraviolet, visible, and near?infrared wavelengths. J. Geophys. Res. 1994, 99, 18669–18684. [Google Scholar] [CrossRef]
- Warren, S.G.; Brandt, R.E. Optical constants of ice from the ultraviolet to the microwave: A revised compilation. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Jin, Z.; Stamnes, K.; Weeks, W.F.; Tsay, S.C. The effect of sea ice on the solar energy budget in the atmosphere-sea ice-ocean system: A model study. J. Geophys. Res. 1994, 99, 25281–25294. [Google Scholar] [CrossRef]
- Hamre, B.; Winther, J.G.; Gerland, S.; Stamnes, J.J.; Stamnes, K. Modeled and measured optical transmittance of snow-covered first-year sea ice in Kongsfjorden, Svalbard. J. Geophys. Res. Oceans 2004, 109. [Google Scholar] [CrossRef]
- Jiang, S.; Stamnes, K.; Li, W.; Hamre, B. Enhanced solar irradiance across the atmosphere–sea ice interface: A quantitative numerical study. Appl. Opt. 2005, 44, 2613–2625. [Google Scholar] [CrossRef] [PubMed]
- Stamnes, K.; Hamre, B.; Stamnes, J.J.; Ryzhikov, G.; Birylina, M.; Mahoney, R.; Hauss, B.; Sei, A. Modeling of radiation transport in coupled atmosphere-snow-ice-ocean systems. J. Quant. Spectrosc. Radiat. Transf. 2011, 112, 714–726. [Google Scholar] [CrossRef]
- Ackermann, M.; Ahrens, J.; Bai, X.; Bartelt, M.; Barwick, S.W.; Bay, R.C.; Becka, T.; Becker, J.K.; Becker, K.H.; Berghaus, P.; et al. Optical properties of deep glacial ice at the South Pole. J. Geophys. Res. 2006, 111. [Google Scholar] [CrossRef]
- Fialho, P.; Hansen, A.D.A.; Honrath, R.E. Absorption coefficients by aerosols in remote areas: A new approach to decouple dust and black carbon absorption coefficients using seven-wavelength Aethalometer data. J. Aerosol Sci. 2005, 36, 267–282. [Google Scholar] [CrossRef]
- Twardowski, M.S.; Boss, E.; Sullivan, J.M.; Donaghay, P.L. Modeling the spectral shape of absorption by chromophoric dissolved organic matter. Mar. Chem. 2004, 89, 69–88. [Google Scholar] [CrossRef]
- Uusikivi, J.; Vähätalo, A.V.; Granskog, M.A.; Sommaruga, R. Contribution of mycosporine-like amino acids and colored dissolved and particulate matter to sea ice optical properties and ultraviolet attenuation. Limnol. Oceanogr. 2010, 55, 703–713. [Google Scholar] [CrossRef] [PubMed]
- Ruddick, K.; Bouchra, N.; Collaborators. Coastcoulor Round Robin—Final Report. 2013. Available online: ftp://ccrropen@ftp.coastcolour.org/RoundRobin/CCRR_report_OCSMART.pdf (accessed on 12 April 2018).
- Babin, M.; Stramski, A.D.; Ferrari, G.M.; Claustre, H.; Bricaud, A.; Obelesky, G.; Hoepffner, N. Variations in the light absorption coefficients of phytoplankton, nonalgal particles and dissolved organic matter in coastal waters around Europe. J. Geophys. Res. 2003, 108. [Google Scholar] [CrossRef]
- Babin, M.; Morel, A.; Fournier-Sicre, V.; Fell, F.; Stramski, D. Light scattering properties of marine particles in coastal and open ocean waters as related to the particle mass concentration. Limnol. Oceanogr. 2003, 28, 843–859. [Google Scholar] [CrossRef]
- Bricaud, A.; Morel, A.; Babin, M.; Allali, K.; Claustre, H. Mie-Scattering Calculation. J. Geophys. Res. 1998, 103, 31033–31044. [Google Scholar] [CrossRef]
- Loisel, H.; Morel, A. Light scattering and chlorophyll concentration in case 1 waters: A re-examination. Limnol. Oceanogr. 1998, 43, 847–857. [Google Scholar] [CrossRef]
- Morel, A.; Antoine, D.; Gentili, B. Bidirectional reflectance of oceanic waters: Accounting for Raman emission and varying particle scattering phase function. Appl. Opt. 2002, 41, 6289–6306. [Google Scholar] [CrossRef] [PubMed]
- Mobley, C.P.; Sundman, L.K.; Boss, E. Phase function effects on oceanic light fields. Appl. Opt. 2002, 41, 1035–1050. [Google Scholar] [CrossRef] [PubMed]
- Diehl, P.; Haardt, H. Measurement of the spectral attenuation to support biological research in a “plankton tube” experiment. Oceanol. Acta 1980, 3, 89–96. [Google Scholar]
- McCave, I.N. Particulate size spectra, behavior, and origin of nephloid layers over the Nova Scotia continental rise. J. Geophys. Res. 1983, 88, 7647–7660. [Google Scholar] [CrossRef]
- Fournier, G.R.; Forand, J.L. Analytic phase function for ocean water. Proc. SPIE Ocean Opt. XII 1994, 2558, 194–202. [Google Scholar]
- Hu, Y.X.; Wielicki, B.; Lin, B.; Gibson, G.; Tsay, S.C.; Stamnes, K.; Wong, T. Delta-fit: A fast and accurate treatment of particle scattering phase functions with weighted singular-value decomposition least squares fitting. J. Quant. Spectrosc. Radiat. Transf. 2000, 65, 681–690. [Google Scholar] [CrossRef]
- Werdell, P.; Bailey, S. An improved in-situ bio-optical data set for ocean color algorithm development and satellite data product validation. Remote Sens. Environ. 2005, 98, 122–140. [Google Scholar] [CrossRef]
- Li, W.; Stamnes, K.; Spurr, R.; Stamnes, J.J. Simultaneous Retrieval of Aerosols and Ocean Properties: A Classic Inverse Modeling Approach. II. SeaWiFS Case Study for the Santa Barbara Channel. Int. J. Rem. Sens. 2008, 29, 5689–5698. [Google Scholar] [CrossRef]
- Garver, S.A.; Siegel, D. Inherent optical property inversion of ocean color spectra and its biogeochemical interpretation 1. Time series from the Sargasso Sea. J. Geophys. Res. 1997, 102, 18607–18625. [Google Scholar] [CrossRef]
- Garver, S.A.; Siegel, D.; Peterson, A.R. Optimization of a semi-analytical ocean color model for global-scale applications. Appl. Opt. 2002, 41, 2705–2714. [Google Scholar]
- Bohren, C.F.; Huffman, D.R. Absorption and Scattering of Light by Small Particles; John Wiley: New York, NY, USA, 1998. [Google Scholar]
- Born, M.; Wolf, E. Principles of Optics; Cambridge University Press: Cambridge, UK, 1980. [Google Scholar]
- Cox, C.; Munk, W. Measurement of the roughness of the sea surface from photographs of the sun’s glitter. J. Opt. Soc. Am. 1954, 44, 838–850. [Google Scholar] [CrossRef]
- Masuda, K. Effects of the speed and direction of surface winds on the radiation in the atmosphere—Ocean system. Remote Sens. Environ. 1998, 64, 53–63. [Google Scholar] [CrossRef]
- Wang, M.; Bailey, S.W. Correction of sun glint contamination on the SeaWiFS ocean and atmosphere products. Appl. Opt. 2001, 40, 4790–4798. [Google Scholar] [CrossRef]
- Nakajima, T.; Tanaka, M. Algorithms for radiative intensity calculations in moderately thick atmospheres using a truncation approximation. J. Quant. Spectrosc. Radiat. Transf. 1988, 40, 51–69. [Google Scholar] [CrossRef]
- Lin, Z.; Stamnes, S.; Jin, Z.; Laszlo, I.; Tsay, S.C.; Wiscombe, W.; Stamnes, K. Improved discrete ordinate solutions in the presence of an anisotropically reflecting lower boundary: Upgrades of the DISORT computational tool. J. Quant. Spectrosc. Radiat. Transf. 2015, 157, 119–134. [Google Scholar] [CrossRef]
- Lin, Z.; Li, W.; Gatebe, C.; Poudyal, R.; Stamnes, K. Radiative transfer simulations of the two-dimensional ocean glint reflectance and determination of the sea surface roughness. Appl. Opt. 2016, 55, 1206–1215. [Google Scholar] [CrossRef] [PubMed]
- Gordon, H.R. Atmospheric correction of ocean color imagery in the Earth Observation System era. J. Geophys. Res. 1997, 102, 17081–17106. [Google Scholar] [CrossRef]
- Rodgers, C.D. Inverse Methods for Atmospheric Sounding: Theory and Practice; World Scientific: London, UK, 2000. [Google Scholar]
- Jin, Z.; Stamnes, K. Radiative transfer in nonuniformly refracting layered media: Atmosphere-ocean system. Appl. Opt. 1994, 33, 431–442. [Google Scholar] [CrossRef] [PubMed]
- Zhai, P.W.; Hu, Y.; Chowdhary, J.; Trepte, C.R.; Lucker, P.L.; Josset, D.B. A vector radiative transfer model for coupled atmosphere and ocean systems with a rough interface. J. Quant. Spectrosc. Radiat. Transf. 2010, 111, 1025–1040. [Google Scholar] [CrossRef]
- Chowdhary, J.; Cairns, B.; Travis, L.D. Case studies of aerosol retrievals over the ocean from multiangle, multispectral photopolarimetric remote sensing data. J. Atmos. Sci. 2002, 59, 383–397. [Google Scholar] [CrossRef]
- Chowdhary, J.; Cairns, B.; Mishchenko, M.I.; Hobbs, P.V.; Cota, G.F.; Redemann, J.; Rutledge, K.; Holben, B.N.; Russell, E. Retrieval of aerosol scattering and absorption properties from photopolarimetric observations over the ocean during the CLAMS experiment. J. Atmos. Sci. 2005, 62, 1093–1117. [Google Scholar] [CrossRef]
- Chowdhary, J.; Cairns, B.; Waquet, F.; Knobelspiesse, K.; Ottaviani, M.; Redemann, J.; Travis, L.; Mishchenko, M. Sensitivity of multiangle, multispectral polarimetric remote sensing over open oceans to water-leaving radiance: Analyses of RSP data acquired during the MILAGRO campaign. Remote Sens. Environ. 2012, 118, 284–308. [Google Scholar] [CrossRef]
- Chami, M.; Santer, R.; Dilligeard, E. Radiative transfer model for the computation of radiance and polarization in an ocean–atmosphere system: Polarization properties of suspended matter for remote sensing. Appl. Opt. 2001, 40, 2398–2416. [Google Scholar] [CrossRef] [PubMed]
- Min, Q.; Duan, M. A successive order of scattering model for solving vector radiative transfer in the atmosphere. J. Quant. Spectrosc. Radiat. Transf. 2004, 87, 243–259. [Google Scholar] [CrossRef]
- Fischer, J.; Grassl, H. Radiative transfer in an atmosphere-ocean system: An azimuthally dependent matrix-operator approach. Appl. Opt. 1984, 23, 1032–1039. [Google Scholar] [CrossRef] [PubMed]
- Ota, Y.; Higurashi, A.; Nakajima, T.; Yokota, T. Matrix formulations of radiative transfer including the polarization effect in a coupled atmosphere-ocean system. J. Quant. Spectrosc. Radiat. Transfer 2010, 111, 878–894. [Google Scholar] [CrossRef]
- Kattawar, G.; Adams, C. Stokes vector calculations of the submarine light field in an atmosphere-ocean with scattering according to the Rayleigh phase matrix: Effect of interface refractive index on radiance and polarization. Limnol. Oceanogr. 1989, 34, 1453–1472. [Google Scholar] [CrossRef]
- Lotsberg, J.; Stamnes, J. Impact of particulate oceanic composition on the radiance and polarization of underwater and backscattered light. Opt. Express 2010, 18, 10432–10445. [Google Scholar] [CrossRef] [PubMed]
- Morel, A.; Gentili, B. Diffuse reflectance of oceanic waters. II. bidirectional aspect. Appl. Opt. 1993, 32, 2803–2804. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y.; Li, W.; Stamnes, K.; Gatebe, C. A neural network method to correct bidirectional effects in water-leaving radiance. Appl. Opt. 2016, 55, 10–421. [Google Scholar] [CrossRef] [PubMed]
- Voss, K.J.; Chapin, A.L. An Upwelling Radiance Distribution Camera System, NURADS. Opt. Express 2005, 13, 4250–4262. [Google Scholar] [CrossRef] [PubMed]
- Kay, S.; Hedley, J.D.; Lavender, S. Sun Glint Correction of High and Low Spatial Resolution Images of Aquatic Scenes: A Review of Methods for Visible and Near-Infrared Wavelengths. Remote Sens. 2009, 1, 697–730. [Google Scholar] [CrossRef]
- Steinmetz, F.; Deschamps, P.Y.; Ramon, D. Atmospheric correction in presence of sun glint: Application to MERIS. Opt. Express 2011, 19, 9783–9800. [Google Scholar] [CrossRef] [PubMed]
- Fukushima, H.; Suzuki, K.; Li, L.; Suzuki, N.; Murakami, H. Improvement of the ADEOS-II/GLI sun-glint algorithm using concomitant microwave scatterometer-derived wind data. Adv. Space Res. 2009, 43, 941–947. [Google Scholar] [CrossRef]
- Wang, M. The Rayleigh lookup tables for the SeaWiFS data processing: accounting for the effects of ocean surface roughness. Int. J. Remote Sens. 2002, 23, 2693–2702. [Google Scholar] [CrossRef]
- Ottaviani, M.; Spurr, R.; Stamnes, K.; Li, W.; Su, W.; Wiscombe, W. Improving the description of sunglint for accurate prediction of remotely sensed radiances. J. Quant. Spectrosc. Radiat. Transf. 2008, 109, 2364–2375. [Google Scholar] [CrossRef]
- Gatebe, C.K.; King, M.D.; Lyapustin, A.I.; Arnold, G.T.; Redemann, J. Airborne spectral measurements of ocean directional reflectance. J. Atmos. Sci. 2005, 62, 1072–1092. [Google Scholar] [CrossRef]
- Stamnes, K.; Tsay, S.C.; Wiscombe, W.; Jayaweera, K. Numerically stable algorithm for discrete-ordinate-method radiative transfer in multiple scattering and emitting layered media. Appl. Opt. 1988, 27, 2502–2509. [Google Scholar] [CrossRef] [PubMed]
- National Oceanic and Atmospheric Administration (NOAA). US Standard Atmosphere; Technical Report; NOAA: Washington, DC, USA, 1976.
- Jin, Z.; Charlock, T.P.; Rutledge, K.; Stamnes, K.; Wang, Y. Analytical solution of radiative transfer in the coupled atmosphere-ocean system with a rough surface. Appl. Opt. 2006, 45, 7443–7455. [Google Scholar] [CrossRef] [PubMed]
- Mobley, C.D. Polarized reflectance and transmittance properties of windblown sea surfaces. Appl. Opt. 2015, 54, 4828–4849. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y.; Li, W.; Stamnes, K.; Stamnes, J.J.; Sørensen, K. Simultaneous Retrieval of AEROSOL and Marine Parameters in Coastal areas Using a Coupled Atmosphere-Ocean Radiative Transfer Model. In Proceedings of the Sentinel-3 for Science Workshop, Venice-Lido, Italy, 2–5 June 2015. [Google Scholar]
- Spurr, R.; Stamnes, K.; Eide, H.; Li, W.; Zheng, K.; Stamnes, J. Simultaneous retrieval of aerosol and ocean color: A classic inverse modeling approach: I. Analytic Jacobians from the linearized CAO-DISORT model. J. Quant. Spectrosc. Radiat. Transf. 2007, 104, 428–449. [Google Scholar] [CrossRef]
- Fan, Y.; Li, W.; Gatebe, C.K.; Jamet, C.; Zibordi, G.; Schroeder, T.; Stamnes, K. Atmospheric correction and aerosol retrieval over coastal waters using multilayer neural networks. Remote Sens. Environ. 2017, 199, 218–240. [Google Scholar] [CrossRef]
- He, X.; Stamnes, K.; Bai, Y.; Li, W.; Wang, D. Effects of Earth curvature on atmospheric correction for ocean color remote sensing. Remote Sens. Environ. 2018, 209, 118–133. [Google Scholar] [CrossRef]
- Stamnes, S.; Hostetler, C.; Ferrari, R.; Burton, S.; Lui, X.; Hair, J.; Hu, Y.; Wasilewski, A.; Martin, W.; Van Diedenhoven, B.; et al. Simultaneous polarimeter retrievals of microphysical aerosol and ocean color parameters from the MAPP algorithm with comparison to high spectral resolution lidar aerosol and ocean products. Appl. Opt. 2018, 57, 2394–2413. [Google Scholar] [CrossRef] [PubMed]
- Stamnes, S.; Fan, Y.; Chen, N.; Li, W.; Tanikawa, T.; Lin, Z.; Liu, X.; Burton, S.; Omar, A.; Stamnes, J.; et al. Advantages of measuring the Q Stokes parameter in addition to the total radiance I in the detection of absorbing aerosols. Front. Earth Sci. 2018, 6, 1–11. [Google Scholar] [CrossRef]
- Dahlback, A.; Stamnes, K. A new spherical model for computing the radiation field available for photolysis and heating at twilight. Planet. Space Sci. 1991, 39, 671–683. [Google Scholar] [CrossRef]
- Spurr, R.J.D. VLIDORT: A linearized pseudo-spherical vector discrete ordinate radiative transfer code for forward model and retrieval studies in multilayer multiple scattering media. J. Quant. Spectrosc. Radiat. Transf. 2006, 102, 316–342. [Google Scholar] [CrossRef]
- Rozanov, V.; Rozanov, A.; Kokhanovsky, A.; Burrows, J. Radiative transfer through terrestrial atmosphere and ocean: Software package SCIATRAN. J. Quant. Spectrosc. Radiat. Transf. 2014, 133, 13–71. [Google Scholar] [CrossRef]
- Davis, A.; Marshak, A. 3D Radiative Transfer in Cloudy Atmospheres; Springer: Berlin, Germany, 2005. [Google Scholar]
- Chandrasekhar, S. On the diffuse reflection of a pencil of radiation by a plane-parallel atmosphere. Proc. Natl. Acad. Sci. USA 1958, 44, 933–940. [Google Scholar] [CrossRef] [PubMed]
- Shiina, T.; Yoshida, K.; Ito, M.; Okamura, Y. Long-range propagation of annular beam for lidar application. Opt. Commun. 2007, 279, 159–167. [Google Scholar] [CrossRef]
- Habel, R.; Christensen, P.H.; Jarosz, W. Photon Beam Diffusion: A Hybrid Monte Carlo Method for Subsurface Scattering. In Proceedings of the 24th Eurographics Symposium on Rendering, Zaragoza, Spain, 19–21 June 2013; Volume 32. [Google Scholar]
- Barichello, L.; Siewert, C. The searchlight problem for radiative transfer in a finite slab. J. Comput. Phys. 2000, 157, 707–726. [Google Scholar] [CrossRef]
- Kim, A.D.; Moscoso, M. Radiative transfer computations for optical beams. J. Comput. Phys. 2003, 185, 50–60. [Google Scholar] [CrossRef]
- Mobley, C.D.; Gentili, B.; Gordon, H.R.; Jin, Z.; Kattawar, G.W.; Morel, A.; Reinersman, P.; Stamnes, K.; Stavn, R.H. Comparison of numerical models for computing underwater light fields. Appl. Opt. 1993, 32, 7484–7504. [Google Scholar] [CrossRef] [PubMed]
- Mitra, K.; Churnside, J.H. Transient radiative transfer equation applied to oceanographic lidar. Appl. Opt. 1999, 38, 889–895. [Google Scholar] [CrossRef] [PubMed]
- Stamnes, K.; Lie-Svendsen, Ø.; Rees, M.H. The linear Boltzmann equation in slab geometry: Development and verification of a reliable and efficient solution. Planet. Space Sci. 1991, 39, 1453–1463. [Google Scholar] [CrossRef]
- De Beek, R.; Vountas, M.; Rozanov, V.; Richter, A.; Burrows, J. The Ring effect in the cloudy atmosphere. Geophys. Res. Lett. 2001, 28, 721–724. [Google Scholar] [CrossRef]
- Landgraf, J.; Hasekamp, O.; Van Deelen, R.; Aben, I. Rotational Raman scattering of polarized light in the Earth atmosphere: a vector radiative transfer model using the radiative transfer perturbation theory approach. J. Quant. Spectrosc. Radiat. Transf. 2004, 87, 399–433. [Google Scholar] [CrossRef]
- Spurr, R.; de Haan, J.; van Oss, R.; Vasilkov, A. Discrete-ordinate radiative transfer in a stratified medium with first-order rotational Raman scattering. J. Quant. Spectrosc. Radiat. Transf. 2008, 109, 404–425. [Google Scholar] [CrossRef]
- Ge, Y.; Gordon, H.; Voss, K. Simulation of inelastic scattering contributions to the irradiance field in the oceanic variation in Fraunhofer line depths. Appl. Opt. 1993, 32, 4028–4036. [Google Scholar] [CrossRef] [PubMed]
- Kattawar, G.; Xu, X. Filling-in of Fraunhofer lines in the ocean by Raman scattering. Appl. Opt. 1992, 31, 1055–1065. [Google Scholar] [CrossRef] [PubMed]
- Voss, K.J.; Fry, E.S. Measurement of the Mueller matrix for ocean water. Appl. Opt. 1984, 23, 4427–4439. [Google Scholar] [CrossRef] [PubMed]
- Werdell, J.P.; Franz, B.A.; Bailey, S.W.; Feldman, G.C.; Boss, E.; Brando, V.E.; Dowell, M.; Hirata, T.; Lavender, S.; Lee, Z.P.; et al. Generalized ocean color inversion model for retrieving marine inherent optical properties. Appl. Opt. 2013, 52, 2019–2037. [Google Scholar] [CrossRef] [PubMed]
- Lee, Z.P.; Carder, K.L.; Arnone, R. Deriving inherent optical properties from water color: A multi-band quasi-analytical algorithm for optically deep waters. Appl. Opt. 2002, 41, 5755–5772. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ℓ | ||||||
|---|---|---|---|---|---|---|
| 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 0 | 0 | |
| 2 | 0 | 0 | 0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stamnes, K.; Hamre, B.; Stamnes, S.; Chen, N.; Fan, Y.; Li, W.; Lin, Z.; Stamnes, J. Progress in Forward-Inverse Modeling Based on Radiative Transfer Tools for Coupled Atmosphere-Snow/Ice-Ocean Systems: A Review and Description of the AccuRT Model. Appl. Sci. 2018, 8, 2682. https://doi.org/10.3390/app8122682
Stamnes K, Hamre B, Stamnes S, Chen N, Fan Y, Li W, Lin Z, Stamnes J. Progress in Forward-Inverse Modeling Based on Radiative Transfer Tools for Coupled Atmosphere-Snow/Ice-Ocean Systems: A Review and Description of the AccuRT Model. Applied Sciences. 2018; 8(12):2682. https://doi.org/10.3390/app8122682
Chicago/Turabian StyleStamnes, Knut, Børge Hamre, Snorre Stamnes, Nan Chen, Yongzhen Fan, Wei Li, Zhenyi Lin, and Jakob Stamnes. 2018. "Progress in Forward-Inverse Modeling Based on Radiative Transfer Tools for Coupled Atmosphere-Snow/Ice-Ocean Systems: A Review and Description of the AccuRT Model" Applied Sciences 8, no. 12: 2682. https://doi.org/10.3390/app8122682
APA StyleStamnes, K., Hamre, B., Stamnes, S., Chen, N., Fan, Y., Li, W., Lin, Z., & Stamnes, J. (2018). Progress in Forward-Inverse Modeling Based on Radiative Transfer Tools for Coupled Atmosphere-Snow/Ice-Ocean Systems: A Review and Description of the AccuRT Model. Applied Sciences, 8(12), 2682. https://doi.org/10.3390/app8122682