Application of Auxiliary Classifier Wasserstein Generative Adversarial Networks in Wireless Signal Classification of Illegal Unmanned Aerial Vehicles

Abstract
:1. Introduction
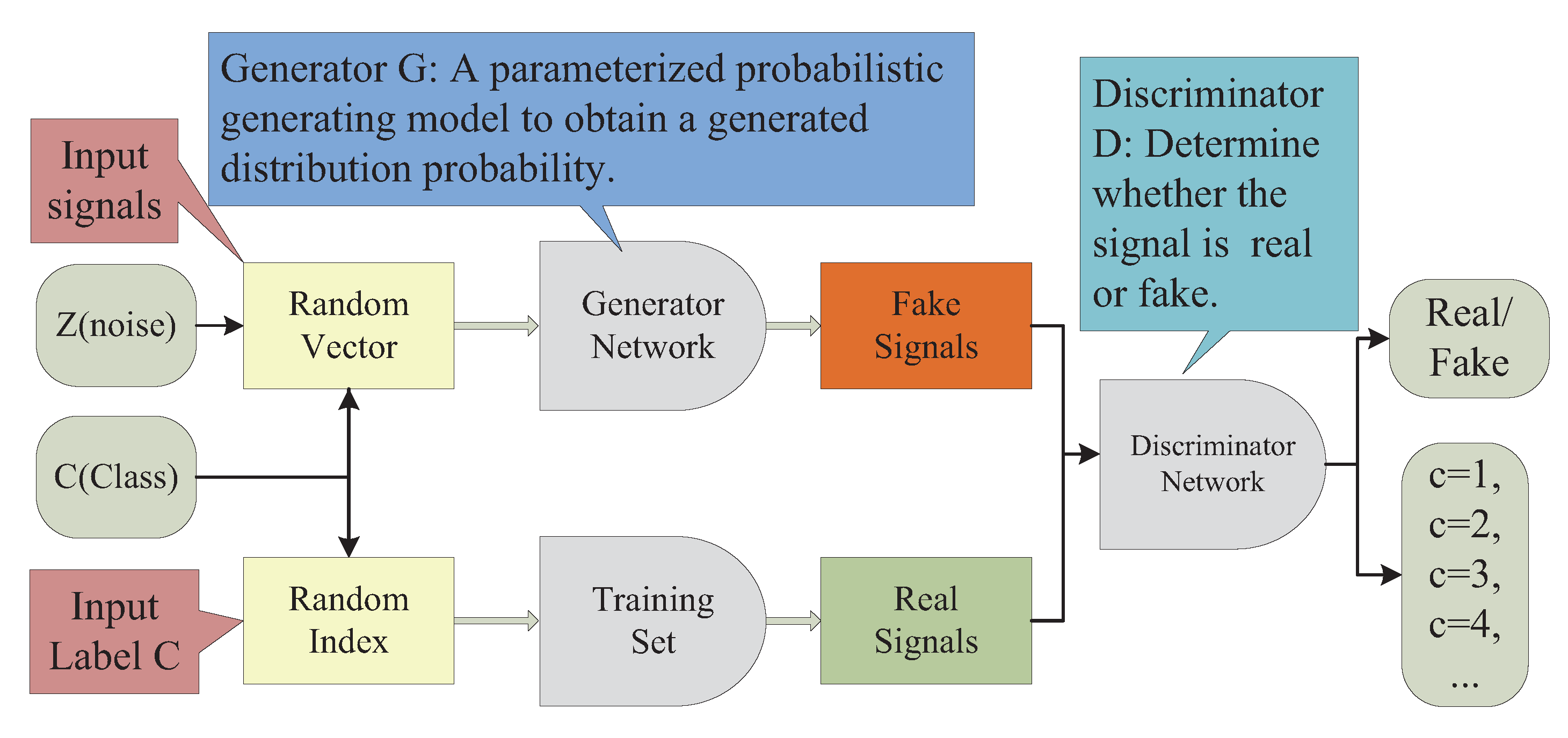
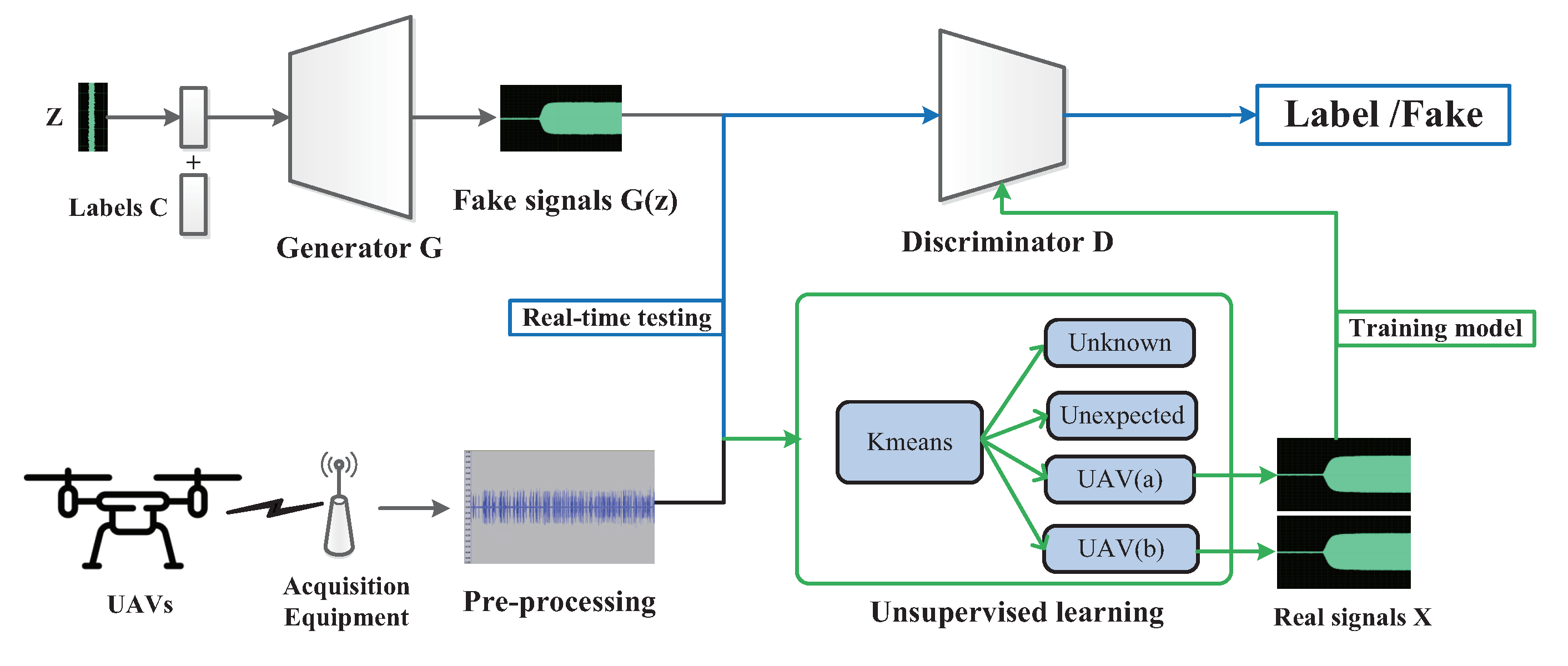
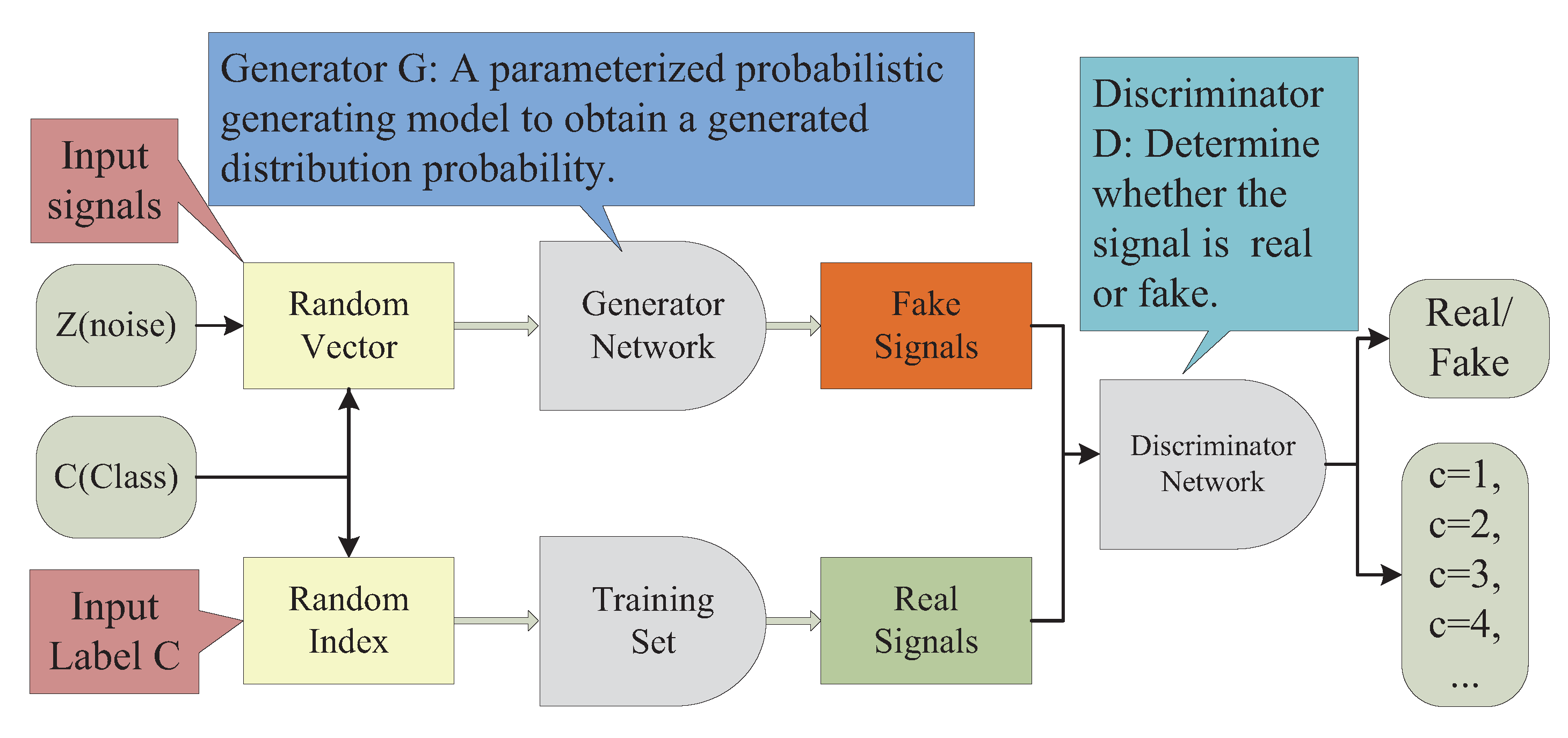
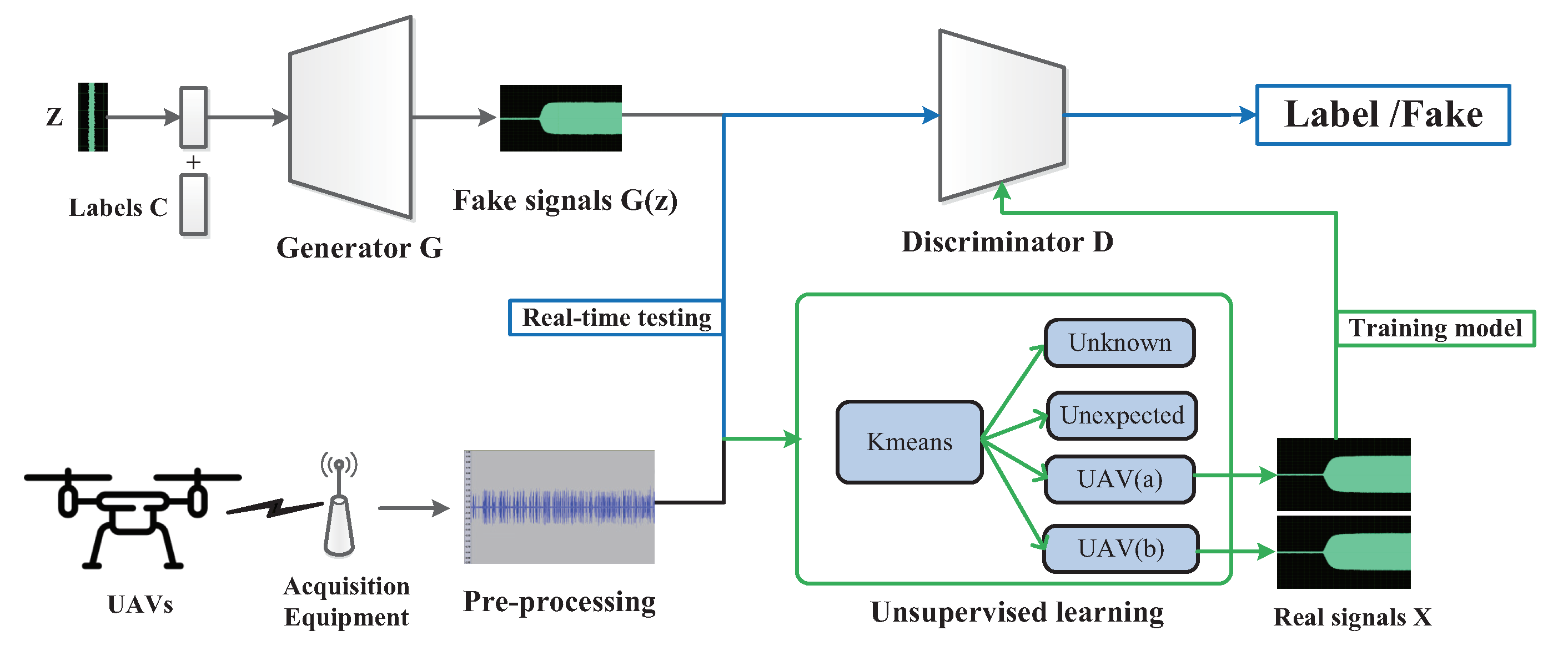
- We propose a novel method of using AC-WGANs model to classify the wireless signal to identify illegal UAVs. Specifically, we improve the generative model G to enhance the training datasets and use the loss function of the model to classify the wireless signals.
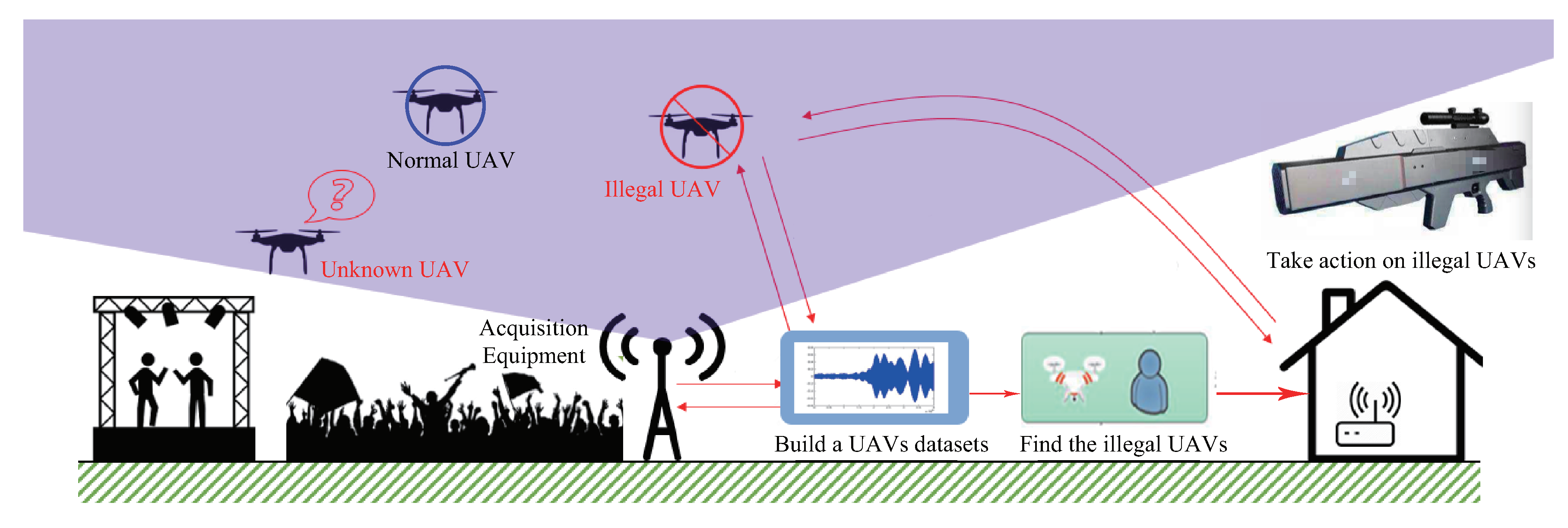
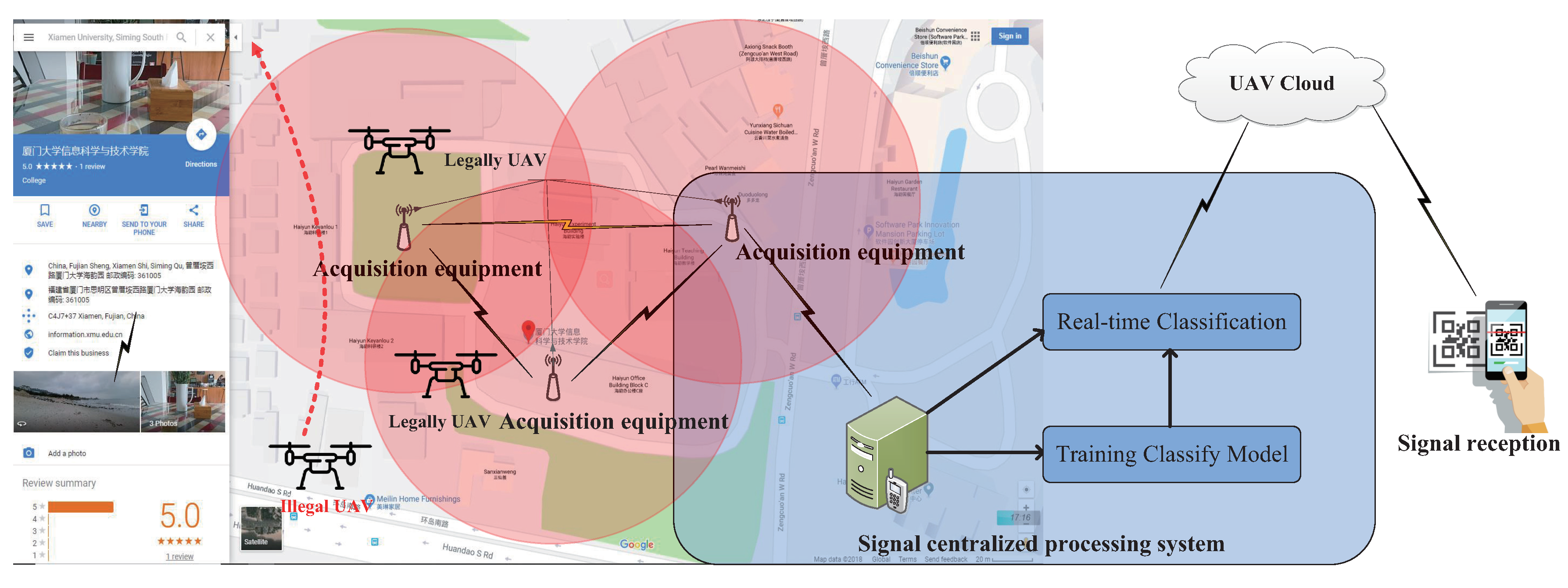
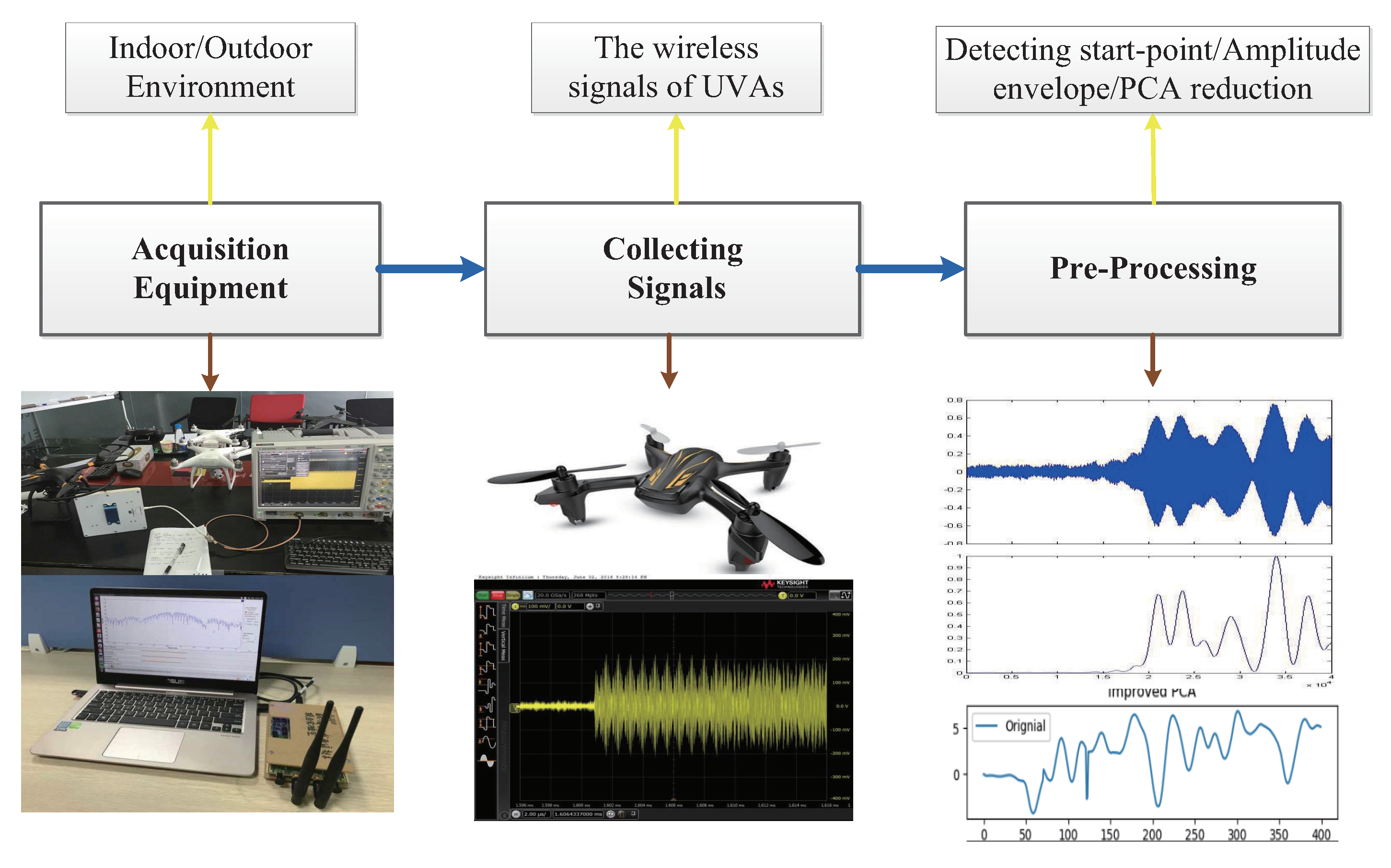
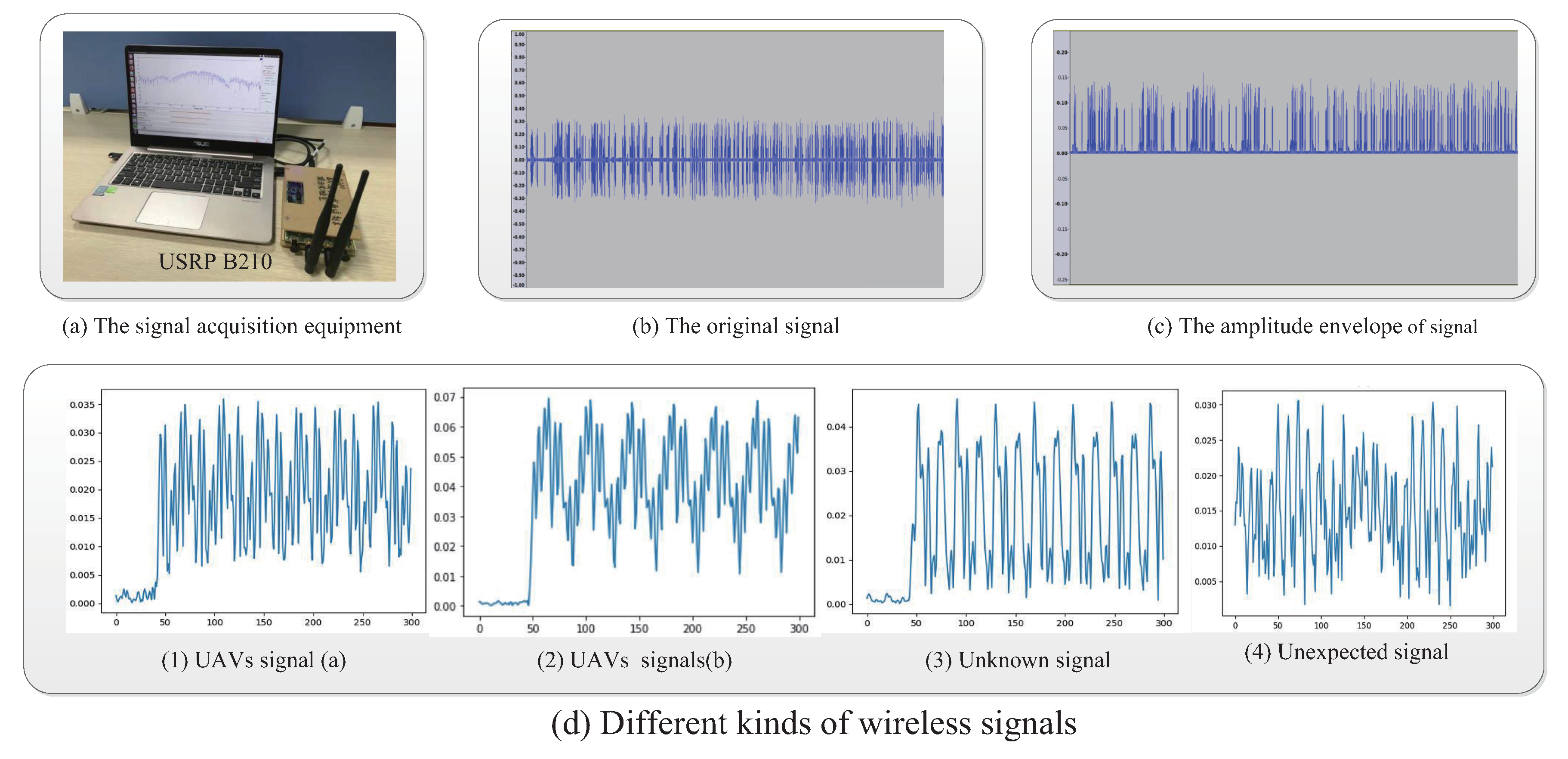
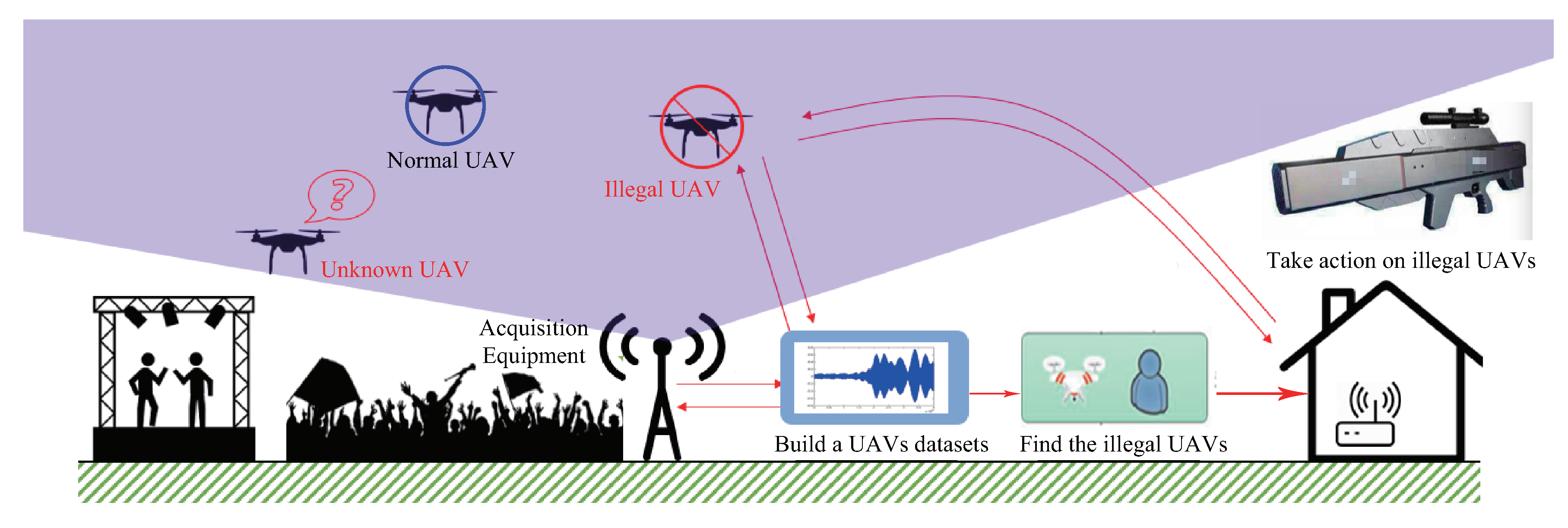
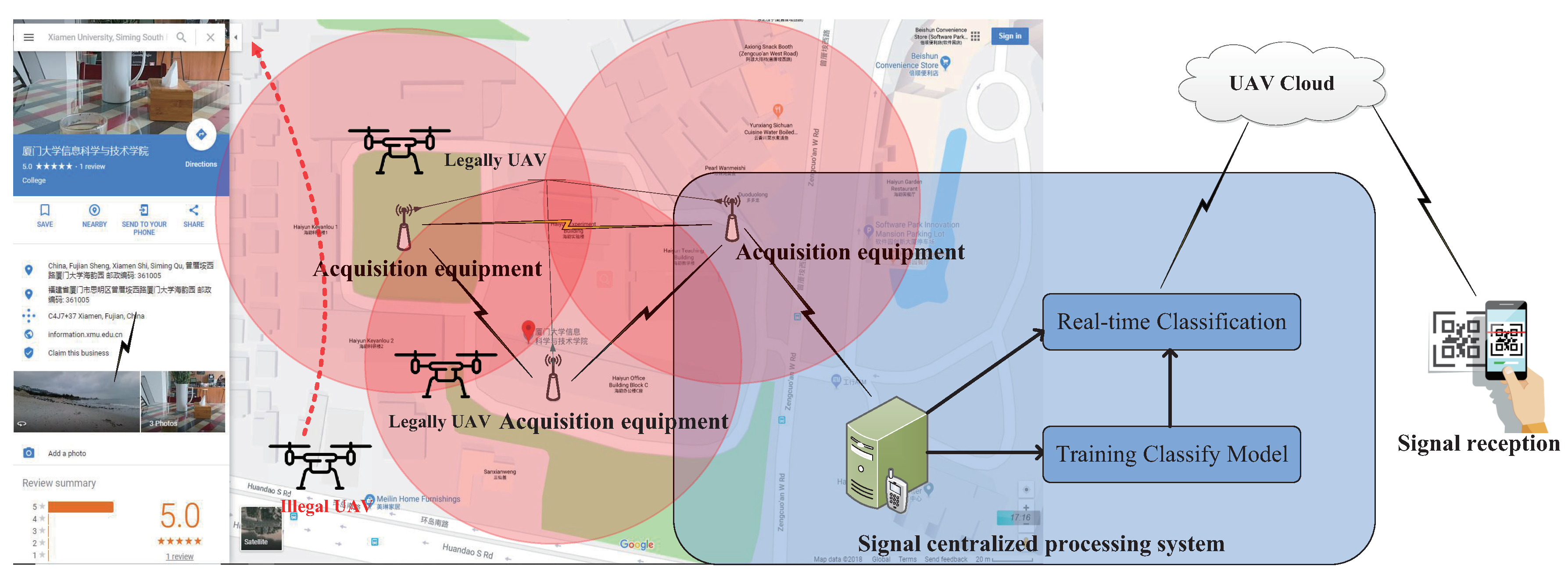
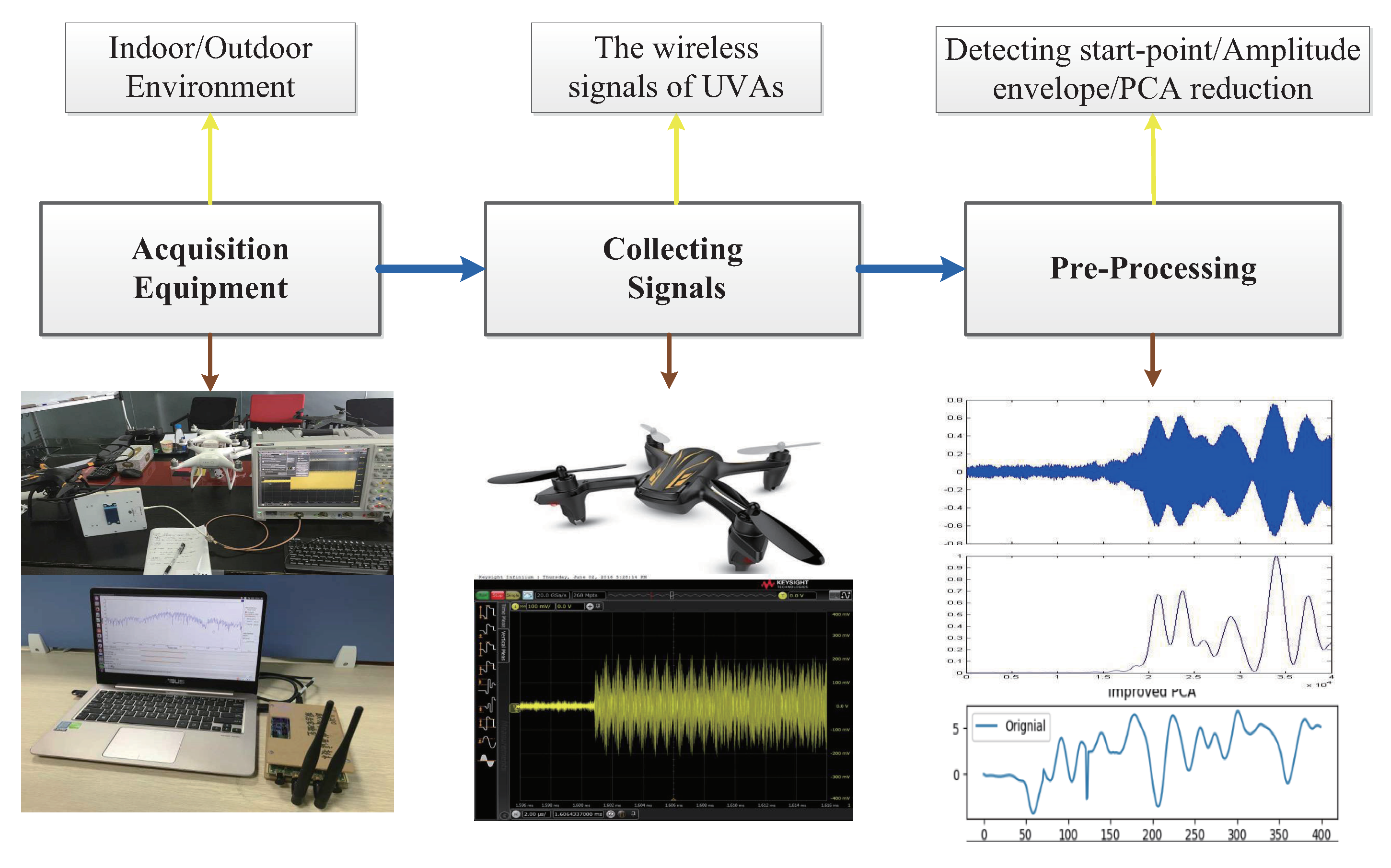
- We establish an illegal UAVs classification system based on the wireless signal. The system is divided into three parts: collecting the wireless signal, pre-processing, and classification. Combined with AC-WGANs model and USRP, a real-time classification system is implemented.
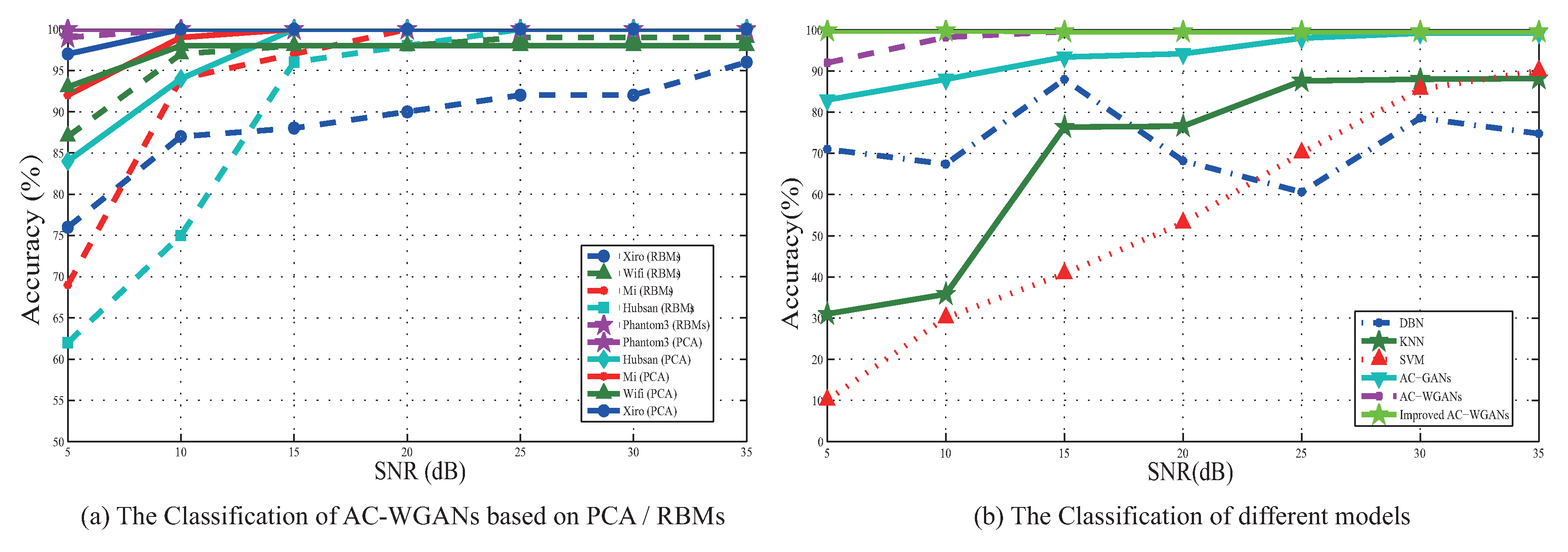
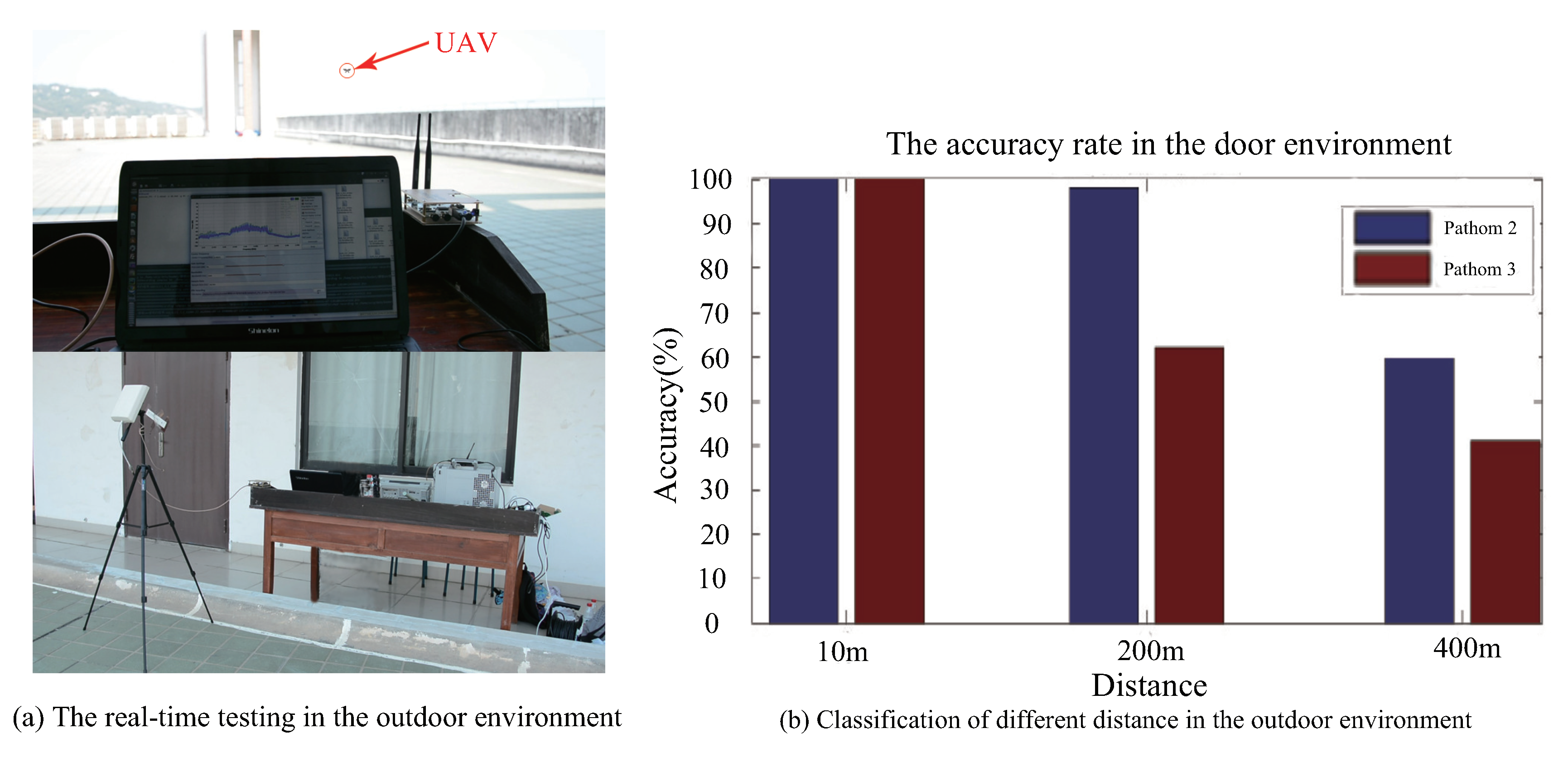
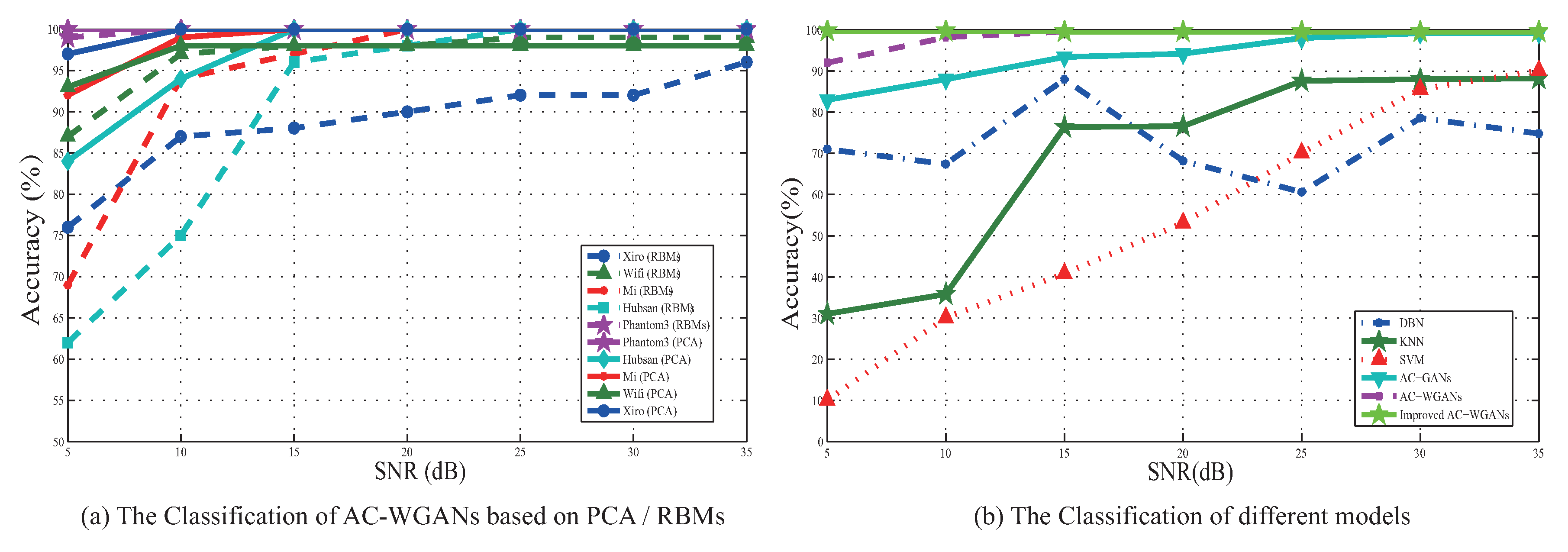
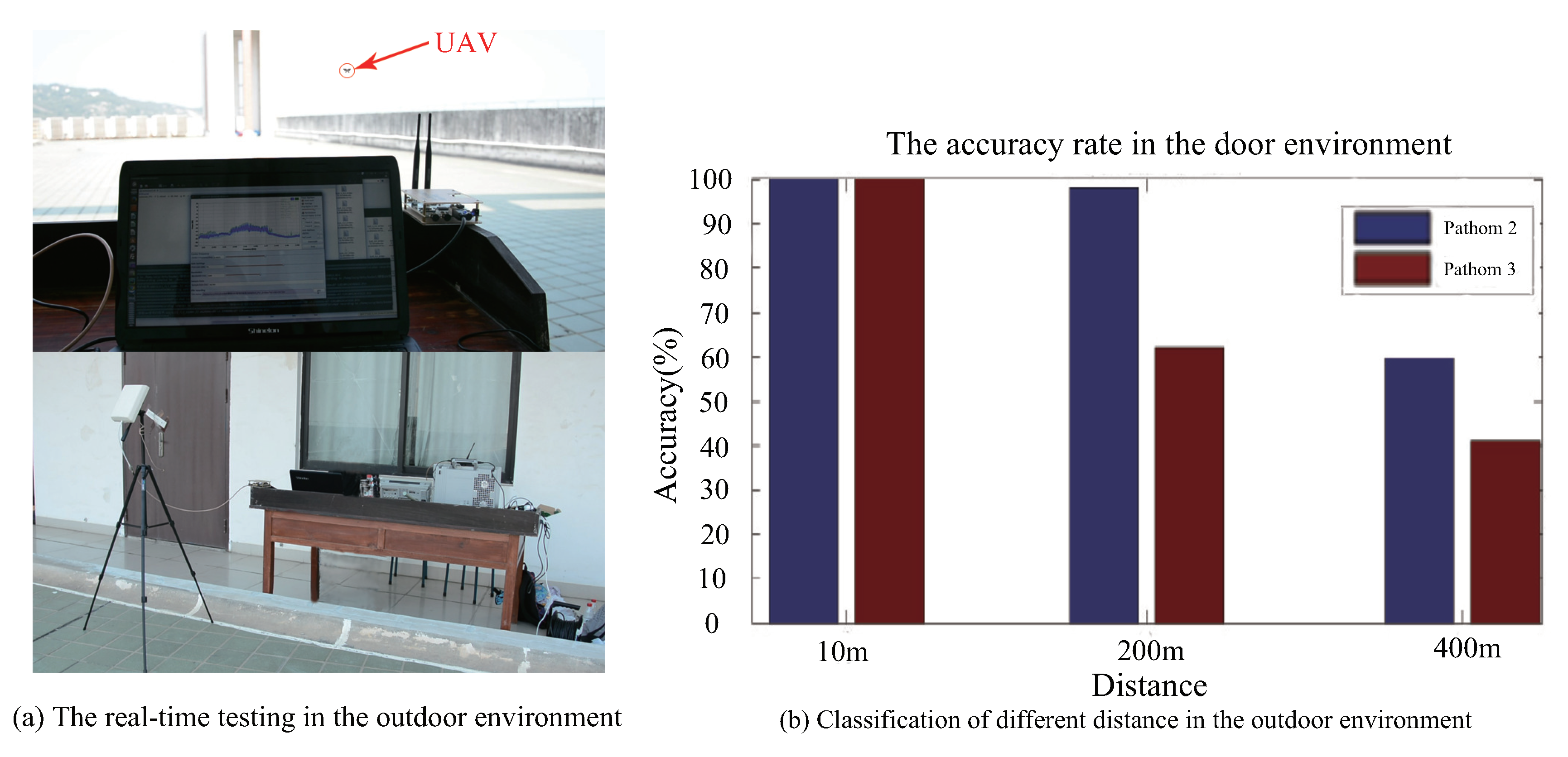
- We compare and analyze the UAVs signals in the indoor environment and the outdoor environment. The recognition rate can reach more than 95% in the indoor environment, and this system is also suitable for outdoor environments.
2. Related Work
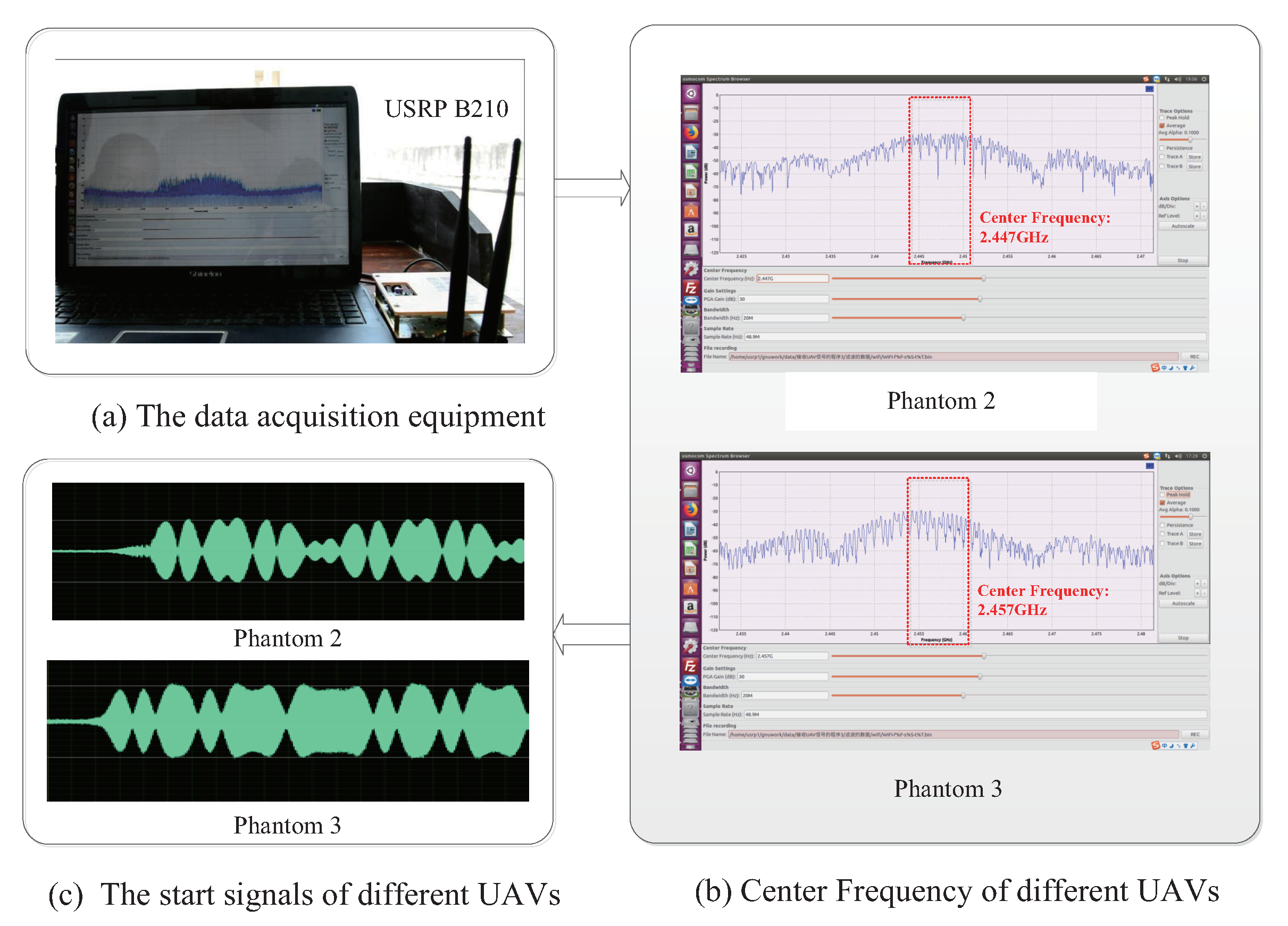
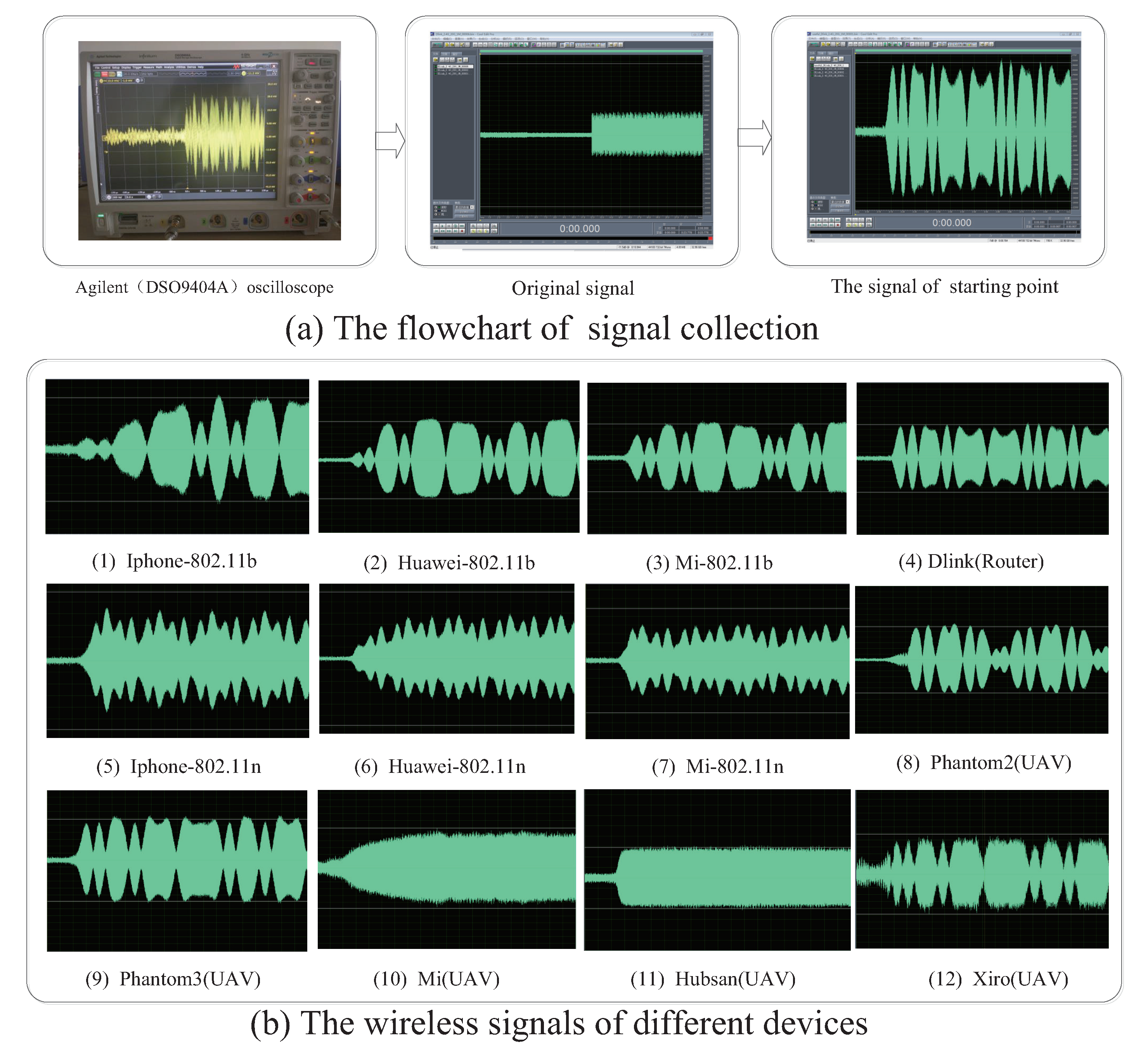
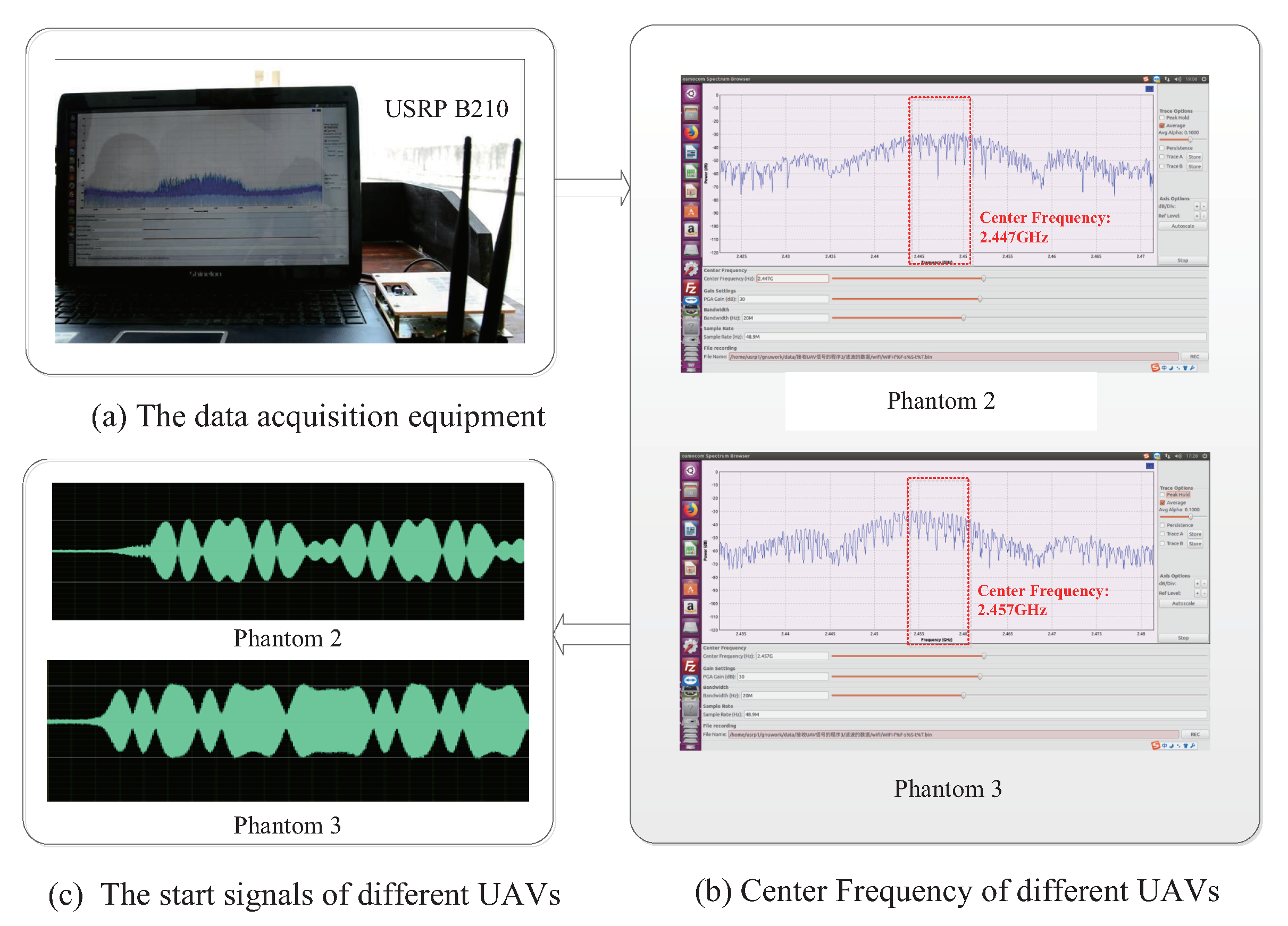
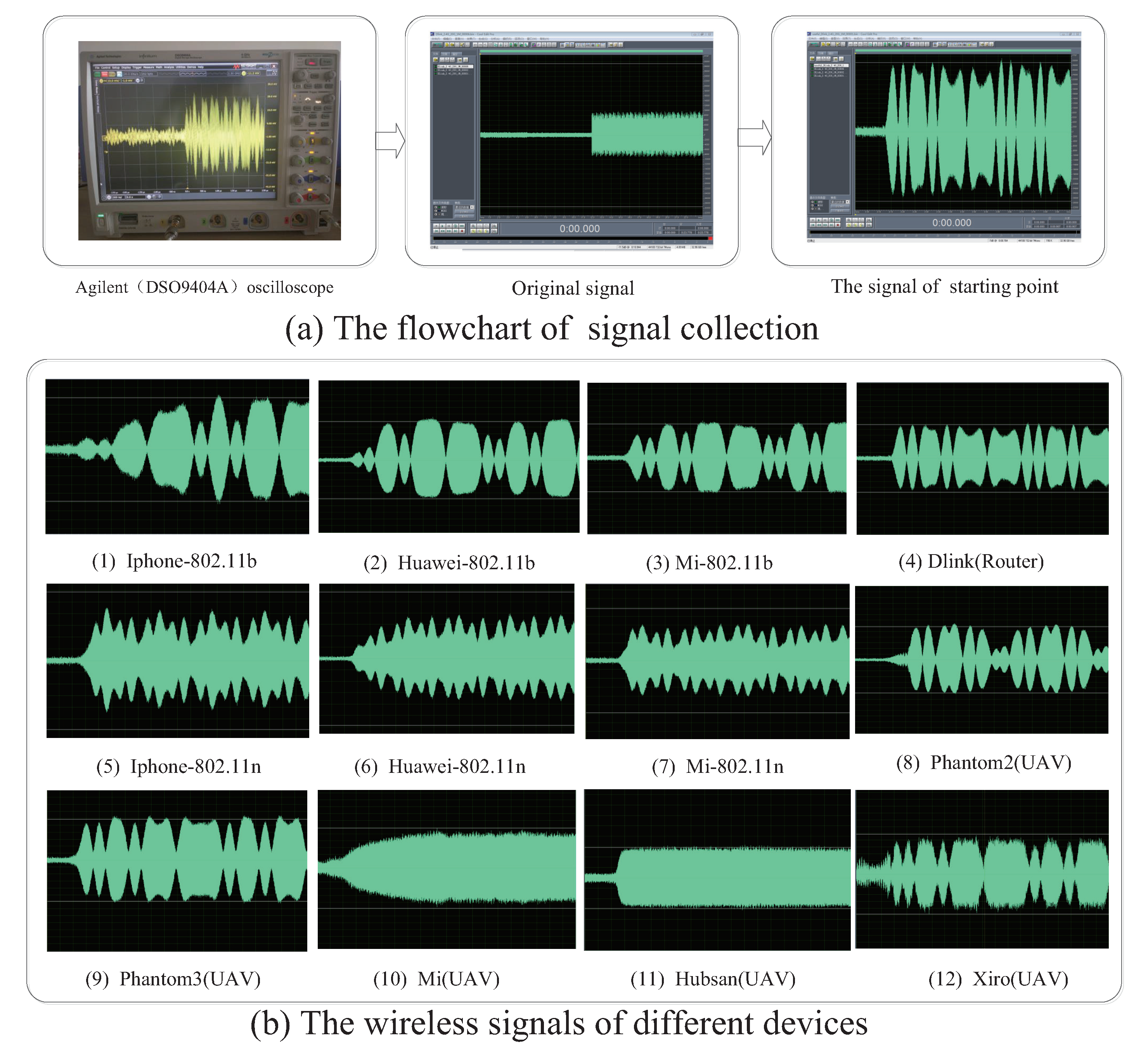
2.1. Wireless Signals of UAVs
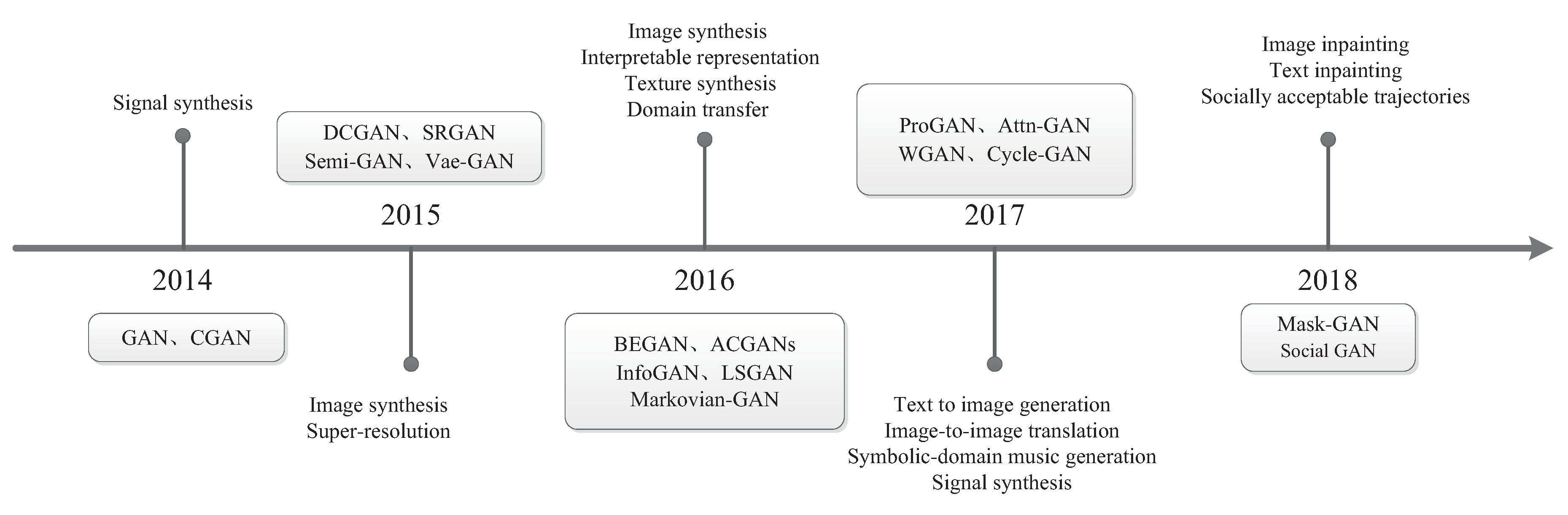
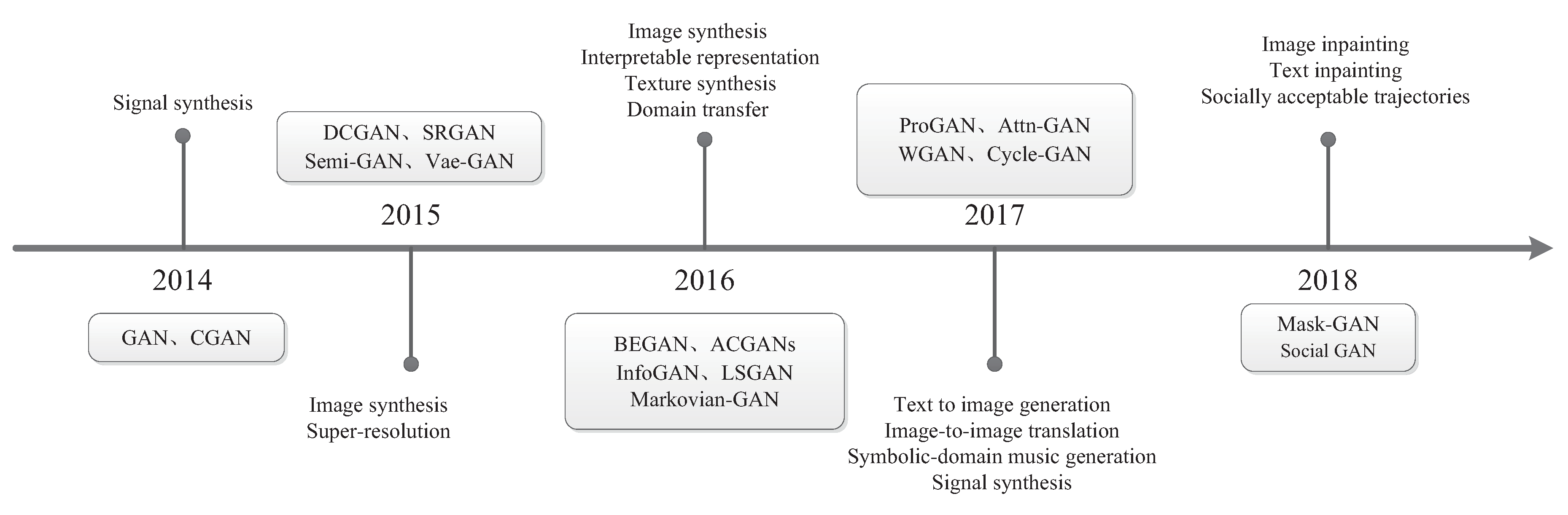
2.2. The Evolution of GAN Model
3. Network Overview
- (1)
- In the feed-forward neural network, it is unnecessary to use smooth Lipschitz functions such as the .
- (2)
- is chosen instead of , which is known to perform well even on very non-stationary problems ( is the learning rate).
- (3)
- The trick can be ignored when training the GAN model with a convolutional architecture.
4. Experiments
4.1. Indoor Environment
4.2. Outdoor Environment
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AFHSS | Adaptive Frequency Hopping Spread Spectrum |
| Attn-GAN | Attentional Generative Adversarial Networks |
| BEGAN | Boundary Equilibrium Generative Adversarial Networks |
| CGAN | Conditional Generative Adversarial Nets |
| Cycle-GAN | Cycle-Consistent Adversarial Networks |
| DSMX | Digital Signal Multiplex Equipment |
| DSSS | Direct Sequence Spread Spectrum |
| FASST | Flexible Audio Source Separation Toolbox |
| FHSS | Frequency Hopping Spread Spectrum |
| FM | Frequency Modulation |
| Markovian-GAN | Markovian Generative Adversarial Networks |
| MASK-GAN | Masked Generative Adversarial Networks |
| OFDM | Orthogonal Frequency Division Multiplexing |
| ProGAN | Progressive Generative Adversarial Networks |
| Semi-GAN | Semi-supervised Learning Generative Adversarial Networks |
| SRGAN | Super-Resolution Generative Adversarial Networks |
| Vae-GAN | Variational Autoencoder Generative Adversarial Networks |
References
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. In Proceedings of the International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 8–11 December 2014; pp. 2672–2680. [Google Scholar]
- GitHub—Hindupuravinash/the-Gan-Zoo: A List of All Named GANs! Available online: https://github.com/hindupuravinash/the-gan-zoo#the-gan-zoo (accessed on 3 December 2018).
- Radford, A.; Metz, L.; Chintala, S. Unsupervised Representation Learning with Deep Convolutional Generative Adversarial Networks. arXiv, 2016; arXiv:1511.06434v2. [Google Scholar]
- Yang, L.C.; Chou, S.Y.; Yang, Y.H. MidiNet: A Convolutional Generative Adversarial Network for Symbolic-domain Music Generation. arXiv, 2017; arXiv:1703.10847. [Google Scholar]
- Zhu, J.Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks. arXiv, 2017; arXiv:1703.10593. [Google Scholar]
- Hesse, C. Image-to-Image Demo—Affine Layer. Available online: https://affinelayer.com/pixsrv/ (accessed on 20 February 2018).
- Xu, T.; Zhang, P.; Huang, Q.; Zhang, H.; Gan, Z.; Huang, X.; He, X. AttnGAN: Fine-Grained Text to Image Generation with Attentional Generative Adversarial Networks. arXiv, 2017; arXiv:1711.10485. [Google Scholar]
- Li, C.; Wand, M. Precomputed Real-Time Texture Synthesis with Markovian Generative Adversarial Networks. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 702–716. [Google Scholar]
- Yoo, D.; Kim, N.; Park, S.; Paek, A.S.; Kweon, I.S. Pixel-Level Domain Transfer; Springer: Cham, Switzerland, 2016; pp. 517–532. [Google Scholar]
- Yu, J.; Lin, Z.; Yang, J.; Shen, X.; Lu, X.; Huang, T.S. Generative Image Inpainting with Contextual Attention. arXiv, 2018; arXiv:1801.07892. [Google Scholar]
- Ahn, T.; Seok, J.; Lee, I.; Han, J. Reliable Flying IoT Networks for UAV Disaster Rescue Operations. Mob. Inf. Syst. 2018, 2018, 1–12. [Google Scholar] [CrossRef]
- World’s First Drone Delivery Service Launches in Iceland. Available online: https://www.cnbc.com/2017/08/22/worlds-first-drone-delivery-service-launches-in-iceland.html (accessed on 23 August 2017).
- UAS Sightings Report. Available online: https://www.faa.gov/uas/resources/uas_sightings_report/ (accessed on 9 August 2018).
- Tran, P. Watch this UAV Crash into a French Nuclear Power Station. Available online: https://www.defensenews.com/unmanned/2018/07/03/watch-this-uav-crash-into-a-french-nuclear-power-station/ (accessed on 3 July 2018).
- Drone Attacks Are Essentially Terrorism by Joystick—The Washington Post. Available online: https://www.washingtonpost.com/opinions/drone-attacks-are-essentially-terrorism-by-joystick/2018/08/05/f93ec18a-98d5-11e8-843b-36e177f3081c_story.html?noredirect=on&utm_term=.fdcd72f3951d (accessed on 5 August 2018).
- Forrest, C. 17 Drone Disasters That Show Why the FAA Hates Drones—TechRepublic. Available online: https://www.techrepublic.com/article/12-drone-disasters-that-show-why-the-faa-hates-drones/ (accessed on 13 June 2018).
- Wikipedia. Delivery Drone—Wikipedia. Available online: https://en.wikipedia.org/wiki/Delivery_drone (accessed on 10 December 2018).
- Ju, C.; Son, H. Multiple UAV Systems for Agricultural Applications: Control, Implementation, and Evaluation. Electronics 2018, 7, 162. [Google Scholar] [CrossRef]
- Park, S.; Park, S.O. Configuration of an X-band FMCW radar targeted for drone detection. In Proceedings of the International Symposium on Antennas and Propagation, Phuket, Thailand, 30 October–2 November 2017; pp. 1–2. [Google Scholar]
- Nguyen, P.; Truong, H.; Ravindranathan, M.; Nguyen, A.; Han, R.; Vu, T. Matthan: Drone Presence Detection by Identifying Physical Signatures in the Drone’s RF Communication. In Proceedings of the International Conference on Mobile Systems, Applications, and Services, New York, NY, USA, 19 June–23 June 2017; pp. 211–224. [Google Scholar]
- Jeon, S.; Shin, J.W.; Lee, Y.J.; Kim, W.H.; Kwon, Y.H.; Yang, H.Y. Empirical Study of Drone Sound Detection in Real-Life Environment with Deep Neural Networks. arXiv, 2017; 1858–1862arXiv:1701.05779. [Google Scholar]
- Lim, D.H.; Kim, H.G.; Hong, S.G.; Lee, S.H.; Kim, G.Y.; Snail, A.; Gotwals, L.; Gallagher, J. Practically Classifying Unmanned Aerial Vehicles Sound Using Convolutional Neural Networks. In Proceedings of the 2018 Second IEEE International Conference on Robotic Computing (IRC), Laguna Hills, CA, USA, 31 January–2 February 2018; pp. 242–245. [Google Scholar]
- Unlu, E.; Zenou, E.; Rivière, N. Using Shape Descriptors for UAV Detection. In Proceedings of the Electronic Imaging 2017, Burlingam, CA, USA, 28 January 2018; pp. 1–5. [Google Scholar]
- Richardson, M. Drones: Detect, Identify, Intercept and Hijack. Available online: https://www.nccgroup.trust/uk/about-us/newsroom-and-events/blogs/2015/december/drones-detect-identify-intercept-and-hijack/ (accessed on 2 December 2015).
- Zhang, H.; Cao, C.; Xu, L.; Gulliver, T.A. A UAV Detection Algorithm Based on an Artificial Neural Network. IEEE Access 2018, 6, 24720–24728. [Google Scholar] [CrossRef]
- Fu, H.; Abeywickrama, S.; Zhang, L.; Yuen, C. Low-Complexity Portable Passive Drone Surveillance via SDR-Based Signal Processing. IEEE Commun. Mag. 2018, 56, 112–118. [Google Scholar] [CrossRef]
- Bisio, I.; Garibotto, C.; Lavagetto, F.; Sciarrone, A.; Zappatore, S. Unauthorized Amateur UAV Detection Based on WiFi Statistical Fingerprint Analysis. IEEE Commun. Mag. 2018, 56, 106–111. [Google Scholar] [CrossRef]
- Zhao, C.; Shi, M.; Cai, Z.; Chen, C. Research on the Open-Categorical Classification of the Internet-of-Things Based on Generative Adversarial Networks. Appl. Sci. 2018, 8, 2351. [Google Scholar] [CrossRef]
- Andre, T.; Hummel, K.; Schoellig, A.; Yanmaz, E. Application-driven design of aerial communication networks. IEEE Commun. Mag. 2014, 52, 129–137. [Google Scholar] [CrossRef]
- The ALENTECH PLUS Can Be Installed on Most DJI Products, These Include the Following. Available online: https://alienth.cn/products/alientech (accessed on 10 December 2018).
- IEEE 802.11—Wikipedia. Available online: https://en.wikipedia.org/wiki/IEEE_802.11 (accessed on 8 December 2018).
- Rapport Research into the Radio Interference Risks of Drones | Rapport | Agentschap Telecom. Available online: https://www.agentschaptelecom.nl/documenten/rapporten/2017/december/6/rapport-research-into-the-radio-interference-risks-of-drones (accessed on 16 January 2018).
- Hauberg, S.; Freifeld, O.; Larsen, A.B.L.; Iii, J.W.F.; Hansen, L.K. Dreaming More Data: Class-dependent Distributions over Diffeomorphisms for Learned Data Augmentation. arXiv, 2016; arXiv:1510.02795. [Google Scholar]
- Chen, X.; Duan, Y.; Houthooft, R.; Schulman, J.; Sutskever, I.; Abbeel, P. InfoGAN: Interpretable Representation Learning by Information Maximizing Generative Adversarial Nets. arXiv, 2016; arXiv:1606.03657. [Google Scholar]
- Mao, X.; Li, Q.; Xie, H.; Lau, R.Y.; Wang, Z.; Smolley, S.P. Least Squares Generative Adversarial Networks. arXiv, 2016; arXiv:1611.04076. [Google Scholar]
- Arjovsky, M.; Chintala, S.; Bottou, L. Wasserstein GAN. arXiv, 2017; arXiv:1701.07875. [Google Scholar]
- Arjovsky, M.; Chintala, S.; Bottou, L. Wasserstein Generative Adversarial Networks. In Proceedings of the 34th International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017; Volume 70, pp. 214–223. Available online: http://proceedings.mlr.press/v70/arjovsky17a.html (accessed on 24 October 2018).
- Odena, A.; Olah, C.; Shlens, J. Conditional Image Synthesis with Auxiliary Classifier GANs. arXiv, 2016; arXiv:1610.09585. [Google Scholar]
- Gulrajani, I.; Ahmed, F.; Arjovsky, M.; Dumoulin, V.; Courville, A. Improved Training of Wasserstein GANs. arXiv, 2017; arXiv:1704.00028. [Google Scholar]
- Test Equipment Solutions Datasheet. Available online: http://www.testequipmenthq.com/datasheets/Agilent-DSO9404A-Datasheet.pdf (accessed on 2 October 2013).
- Zhao, C.; Chi, T.Y.; Huang, L.; Yao, Y.; Kuo, S.Y. Wireless local area network cards identification based on transient fingerprinting. Wirel. Commun. Mob. Comput. 2013, 13, 711–718. [Google Scholar] [CrossRef]
- Zhao, C.; Shi, M.; Cai, Z.; Chen, C. Detection of unmanned aerial vehicle signal based on Gaussian mixture model. In Proceedings of the International Conference on Computer Science and Education, Philadelphia, PA, USA, 21–23 October 2017; pp. 289–293. [Google Scholar]
- GitHub—Meownoid/Tensorfow-rbm: Tensorflow Implementation of Restricted Boltzmann Machine. Available online: https://github.com/meownoid/tensorfow-rbm (accessed on 1 January 2018).
- Google Code Archive—Long-Term Storage for Google Code Project Hosting. Available online: https://code.google.com/archive/p/matrbm/ (accessed on 1 November 2010).
- USRP B200/B210 Product Overview. Available online: https://www.ettus.com/content/files/b200-b210_spec_sheet.pdf (accessed on 1 December 2018).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detection Technology | Advantages | Drawbacks |
|---|---|---|
| Radar detection | Well-Suited for long-distance. No need cooperation from the target. | Expensive. Low/no waves reflect from non-reflective materials. Hardly distinguishable from birds or bats. Flying at an altitude of fewer than 100 feet would be difficult to detect. |
| Acoustic detection | Low cost.Passive. Easy to be combined with other technology. | Easy to be deceived.Cannot detect fixed wing UAV. Detection distance less than 500 m. |
| Visual detection | Flexibility. Inexpensive.Detect either large aircraft or small objects. | Limited by light and weather. Need to create recognition database. |
| MAC address | Relatively inexpensive. Effective detection and accurate tracking. | Suffer from interference. Must have some knowledge of emitter parameter and protocol. |
| Ray Tracing Simulations | Convenient to simulate different scenarios. | Unable to deal with micro-Doppler effect. |
| Frequency | Modulation | Technology | |
|---|---|---|---|
| Control | 2.4 GHz/5.8 GHz | FHSS/DSSS/OFDM | FASST/Lightbridge/DSMX/DMSS/AFHSS/HOTT/ZigBee/WiFi |
| Telemetry | 868 MHz/433 MHz/2.4 GHz/4 GHz | Divers/DSSS/OFDM | ZigBee |
| Video | 2.4 GHz/5.8 GHz | OFDM/FM | Lightbridge/WiFi |
| Phantom3 | Hubsan | Mi | Wifi | Xiro | |
|---|---|---|---|---|---|
| Phantom3 | 86.0% | 0.0% | 0.0% | 0.0% | 0.0% |
| Hubsan | 0.5% | 99.5% | 0.0% | 0.0% | 0.0% |
| Mi | 0.0% | 0.0% | 99.5% | 0.0% | 0.0% |
| Wifi | 0.0% | 0.0% | 0.0% | 100.0% | 0.0% |
| Xiro | 1.5% | 0.0% | 0.0% | 0.0% | 99.5% |
| Unknown | 12.0% | 0.5% | 0.5% | 0.0% | 0.5% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, C.; Chen, C.; He, Z.; Wu, Z. Application of Auxiliary Classifier Wasserstein Generative Adversarial Networks in Wireless Signal Classification of Illegal Unmanned Aerial Vehicles. Appl. Sci. 2018, 8, 2664. https://doi.org/10.3390/app8122664
Zhao C, Chen C, He Z, Wu Z. Application of Auxiliary Classifier Wasserstein Generative Adversarial Networks in Wireless Signal Classification of Illegal Unmanned Aerial Vehicles. Applied Sciences. 2018; 8(12):2664. https://doi.org/10.3390/app8122664
Chicago/Turabian StyleZhao, Caidan, Caiyun Chen, Zeping He, and Zhiqiang Wu. 2018. "Application of Auxiliary Classifier Wasserstein Generative Adversarial Networks in Wireless Signal Classification of Illegal Unmanned Aerial Vehicles" Applied Sciences 8, no. 12: 2664. https://doi.org/10.3390/app8122664
APA StyleZhao, C., Chen, C., He, Z., & Wu, Z. (2018). Application of Auxiliary Classifier Wasserstein Generative Adversarial Networks in Wireless Signal Classification of Illegal Unmanned Aerial Vehicles. Applied Sciences, 8(12), 2664. https://doi.org/10.3390/app8122664