Implementation of Explosion Safety Regulations in Design of a Mobile Robot for Coal Mines

 , , , and
, , , and
Abstract
Featured Application
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. State of Art
2.1. Legislation Overview
2.2. Existing Mobile Robots
2.3. Requirements for the Robot
- significant reduction or total lack of visibility,
- high temperature (up to 60 degrees Celsius) and humidity (up to 100%),
- difficult terrain, i.e., significant excavation slope, uneven ground, water spills of different depths,
- reduced cross-sectional area of mining working,
- numerous obstacles specific to cave-ins and related to stored improperly or scattered material, and
- technological obstacles: structures of conveyors, conveyor drives, excavation protection structures and their intersections, hydraulic or wood racks, railroad tracks, turnouts, loading ramps, winches, transformers, switchgear or single switches, pumps, hoses, drainage, sheet, elements of concrete, machine constructions and their fixing—beam, struts, chains, wire ropes, tubes, pipes, cables, ventilation fans, and lutes.
- about 3–4 h of work, and
- from several hours to several days in idle mode.
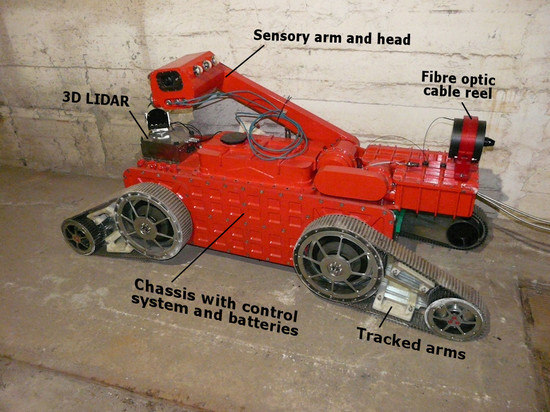
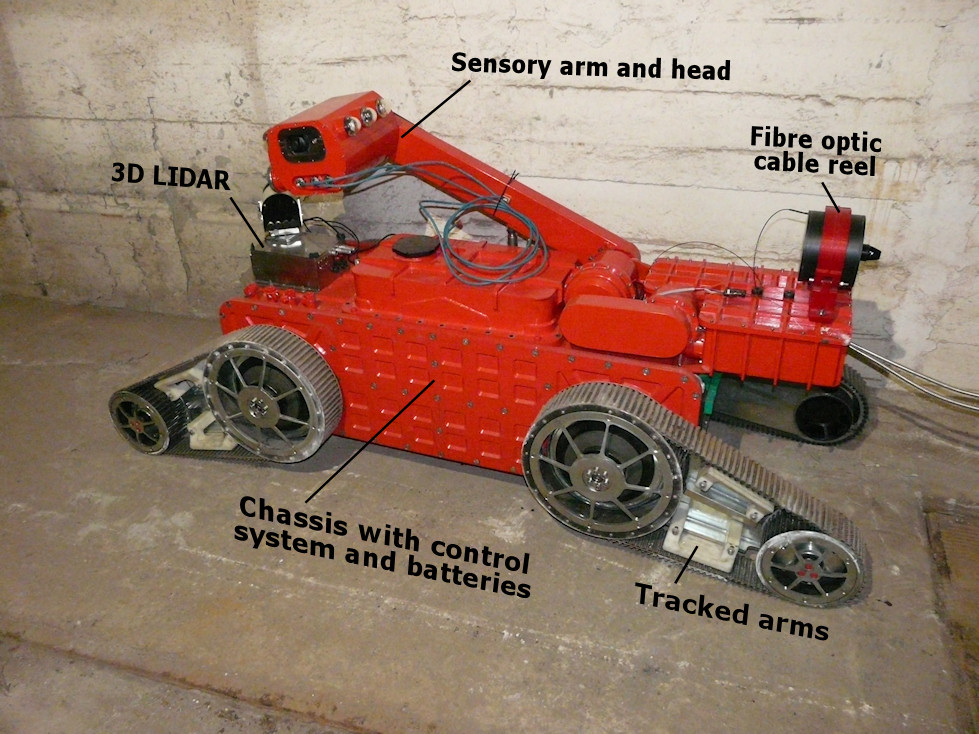
3. Description of the Mobile Robot Telerescuer
3.1. Main Robot Chassis and Control System
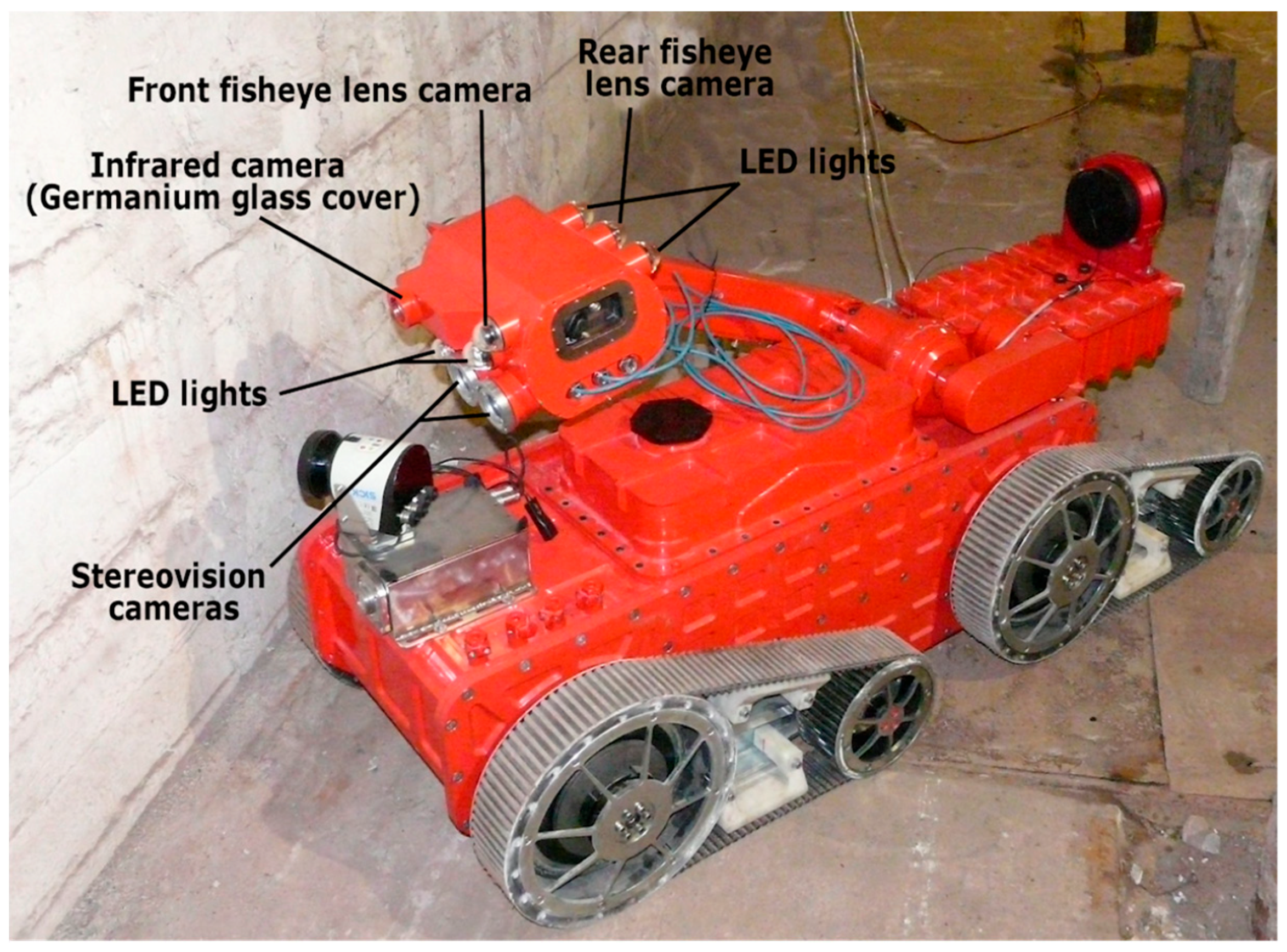
3.2. Sensors, 3D Mapping and Autonomy
3.3. Operator—Robot Communication
3.4. Technical Data
- weight: 590 kg,
- width: 741 mm,
- length: 2100 mm (tracks horizontally), 1540 mm (tracks vertically),
- height: 500 mm (minimal height, tracks horizontally), 920 mm (standing on tracks), additional +780 mm with arm in the top-most position,
- ability to drive through a tube with inner diameter 800 mm,
- driving speed: 0.5 m/s (software limited),
- battery capacity: approx. 2 h of operation,
- communication cable length: 2000 m, and
- pulling force: 1200 N (measured during tests).
4. Implementation of IEC 60079 for TeleRescuer
4.1. Classification
- Group I—equipment intended for use in underground mines and parts of surface installations of such mines, liable to be endangered by the explosion of methane and/or coal dust. Group I is further divided into Categories M1 and M2.
- Group II—equipment intended for use in other industries exposed to explosive atmospheres (further divided into Categories 1, 2, and 3).
- Category M1—equipment designed so that it can safely operate in the presence of an explosive atmosphere. This is achieved through the use of integrated explosion protection measures selected, so that in the event of a failure of one of them, at least the second measure provides an adequate level of protection (two protections based on different principles); or, in case of two independent failures, an adequate level of protection is still assured (triple protection).
- Category M2—equipment designed to ensure a high level of safety under normal conditions, and in the case of severe operating conditions, resulting e.g., due to careless handling of the device or changing of environmental conditions.
4.2. Achieving ATEX Group I, Category M1
4.3. The Selected Solution for TeleRescuer
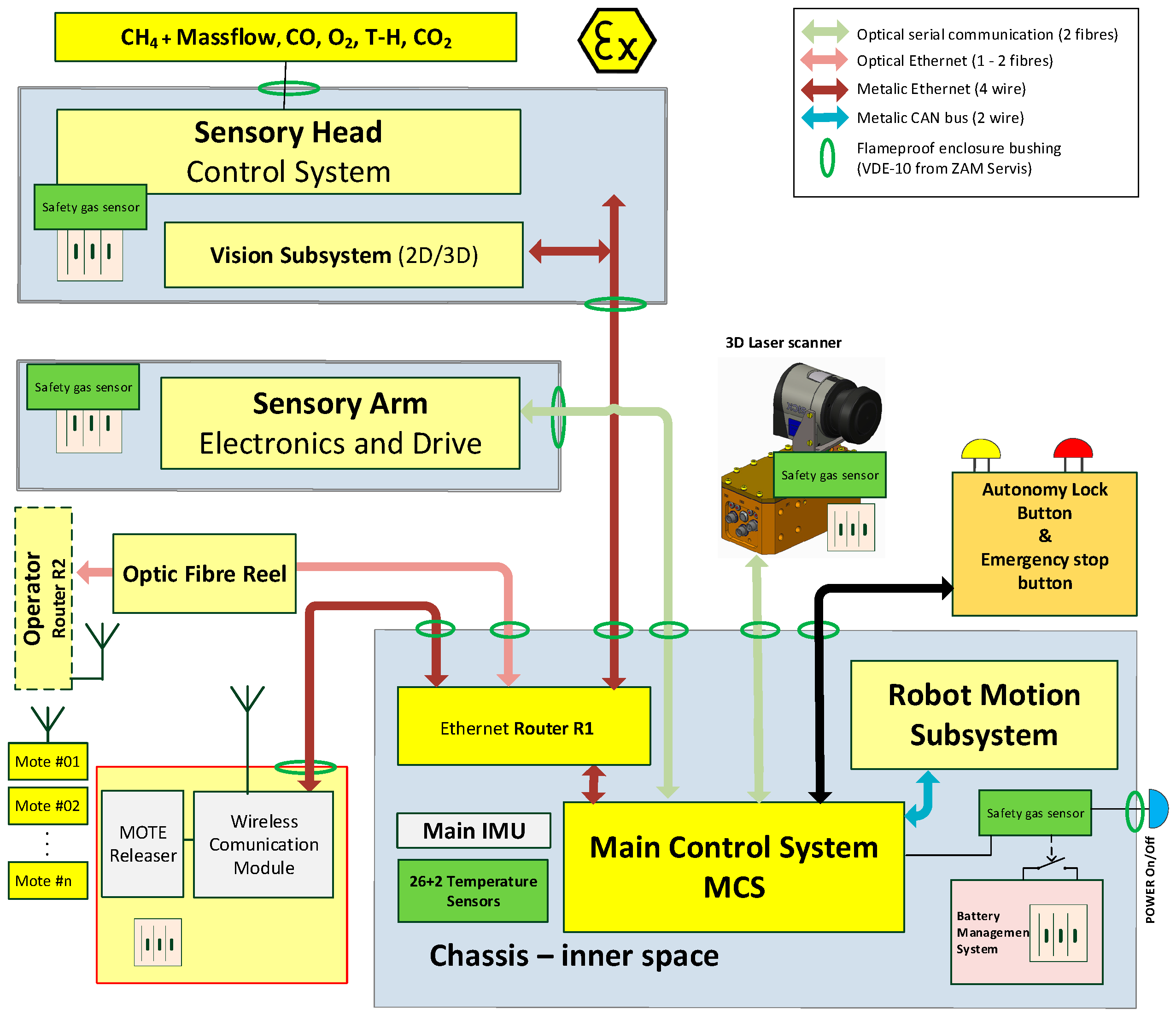
4.4. Separation of Subsystems
4.5. Flameproof Enclosure
4.6. Automatic Safety Gas Detector
- manual control of the power of the whole system (the main power on/off button),
- manual activation of the safety central stop button,
- command from the operator control system (safety central stop button on the operator panel),
- the dangerous concentration of methane detected inside the subsystem, and
- activation of an independent watchdog monitoring the embedded control system.
4.7. Other Protections
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wikipedia. Mining Accident. Available online: https://en.wikipedia.org/wiki/Mining_accident (accessed on 3 July 2018).
- The National Institute for Occupational Safety and Health. Coal Mining Disaster: 1839 to Present. Available online: https://www.cdc.gov/niosh/mining/statistics/content/coaldisasters.html (accessed on 3 July 2018).
- Moczulski, W.; Cyran, K.; Januszka, M.; Novak, P.; Rodriguez, A. System for Virtual Teleportation of Rescuer for Inspecting Coal Mine Areas Affected by Catastrophic Events; Technical Annex of the Project Application; Silesian University of Technology: Gliwice, Poland, 2014. [Google Scholar]
- Yang, D.; Wang, L.; Chen, J. The basic safety requirements of the coal mine rescue robot. Coal Mine Saf. 2009, 42, 104–107. [Google Scholar]
- EUR-Lex. Directive 2014/34/EU of the European Parliament and of the Council. Available online: https://eur-lex.europa.eu/legal-content/En/TXT/?uri=CELEX:32014L0034 (accessed on 9 July 2018).
- Czech Office for Standards, Metrology and Testing. ČSN EN 60079-0 ed. 4. Explosive atmospheres—Part 0: Equipment—General Requirement; Czech Office for Standards: Prague, Czech Republic, 2013; p. 100. [Google Scholar]
- CNEX-Global. Chinese Ex Product Certification. Available online: http://www.cnex-global.com/services/chinese-ex-product-certification.html (accessed on 3 July 2018).
- Petzl. Explosive Environments: HAZLOC Standard. Available online: https://www.petzl.com/BE/en/Professional/Explosive-environments--HAZLOC-standard (accessed on 3 July 2018).
- Certification of Conformity & Industrial Safety. Technical Regulations CU TR 012/2011 on the Safety of Equipment in Explosion Hazardous Environments—Certification and Declaration of Conformity. Available online: http://www.ccis-expertise.com/en/technical-regulations-cu-tr-012-2011-on-safety-of-equipment-in-explosion-hazardous-environments (accessed on 3 July 2018).
- New South Wales Government. Coal Mine Health and Safety Act 2002 No. 129. Available online: https://legislation.nsw.gov.au/#/view/act/2002/129 (accessed on 11 July 2018).
- Compilation of Regulatory Approaches Used in Various Countries. Available online: https://www.unece.org/fileadmin/DAM/trade/wp6/SectoralInitiatives/EquipmentForExplosiveEnvironment/SIEEE-QuestionsRepliesE.pdf (accessed on 11 July 2018).
- Ray, D.N.; Majumder, S.; Maity, A.; Roy, B.; Karmakar, S. Design and development of a mobile robot for environment monitoring in underground coal mines. In Proceedings of the 2015 Conference on Advances in Robotics, Goa, India, 2–4 July 2015; ISBN 978-1-4503-3356-6. [Google Scholar]
- Gomathi, V.; Sowmeya, S.; Avudaiammal, P.S. Design of an Adaptive Coal Mine Rescue Robot using Wireless Sensor Networks. Int. Comput. Appl. 2015, 2, 8–11. [Google Scholar]
- Ma, X.; Mao, R. Path Planning for Coal Mine Robot to Avoid Obstacle in Gas Distribution Area. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Wang, W.; Dong, W.; Su, Y.; Wu, D.; Du, Z. Development of search-and-rescue robots for underground coal mine applications. J. Field Robot. 2014, 31, 386–407. [Google Scholar] [CrossRef]
- Jonathon, C.R.; David, W.; Hainsworth, A. The numbat: A remotely controlled mine emergency response vehicle. In Field and Service Robotics; Springer: London, UK, 1998; pp. 53–59. ISBN 978-1-4471-1273-0. [Google Scholar]
- United States Department of Labor. MSHA-Wolverine Robot. Available online: https://arlweb.msha.gov/sagomine/robotdetails.asp (accessed on 10 July 2018).
- Sandia National Laboratories. Gemini-Scout Mine Rescue Vehicle. Available online: http://www.sandia.gov/research/ robotics/unique_mobility/gemini-scout.html (accessed on 10 July 2018).
- Kasprzyczak, L.; Szwejkowski, P.; Cader, M. Robotics in Mining Exemplified by Mobile Inspection Platform. Min. Inf. Autom. Electr. Eng. 2016, 2, 23–28. [Google Scholar]
- TeleRescuer. Available online: http://www.telerescuer.polsl.pl (accessed on 3 July 2018).
- Department of Robotics, TeleRescuer. Available online: http://robot.vsb.cz/telerescuer/ (accessed on 3 July 2018).
- Babjak, J.; Novák, P.; Kot, T.; Moczulski, W.; Adamczyk, M.; Panfil, W. Control System of a Mobile Robot for Coal Mines. In Proceedings of the 2016 17th International Carpathian Control Conference (ICCC), Tatranska Lomnica, Slovakia, 29 May–1 June 2016; pp. 17–20, ISBN 978-146738606-7. [Google Scholar]
- Novak, P.; Babjak, J.; Kot, T.; Bobovský, Z.; Olivka, P.; Moczulski, W.; Timofiejczuk, A.; Adamczyk, M.; Guzman, B.G.; Armada, A.G.; et al. Telerescuer—Reconnaissance mobile robot for underground coal mines. In Proceedings of the 2017 Coal Operators’ Conference, Wollongong, Australia, 8–10 February 2017; The University of Wollongong Printery: Wollongong, Australia, 2017; pp. 332–340, ISBN 978-1-74128-261-0. [Google Scholar]
- Olivka, P.; Mihola, M.; Novák, P.; Kot, T.; Babjak, J. The 3D laser range finder design for the navigation and mapping for the coal mine robot. In Proceedings of the 17th IEEE International Carpathian Control Conference (ICCC), Tatranska Lomnica, Slovakia, 29 May–1 June 2016; pp. 533–538, ISBN 978-146738606-7. [Google Scholar]
- Kot, T.; Novák, P.; Babjak, J. Visualization of Point Clouds Built from 3D Scanning in Coal Mines. In Proceedings of the 17th IEEE International Carpathian Control Conference (ICCC), Tatranska Lomnica, Slovakia, 29 May–1 June 2016; pp. 372–377, ISBN 978-146738606-7. [Google Scholar]
- Kot, T.; Novák, P.; Babjak, J.; Olivka, P. Rendering of 3D Maps with Additional Information for Operator of a Coal Mine Mobile Robot. In Modelling and Simulation for Autonomous Systems MESAS 2016; Lecture Notes in Computer Science; Springer: Berlin, Germany, 2016; Volume 9991, pp. 214–225. [Google Scholar]
- Kot, T.; Novák, P.; Babjak, J. Virtual Operator Station for Teleoperated Mobile Robots. In Proceedings of the International Workshop on Modelling and Simulation for Autonomous Systems (MESAS), Prague, Czech Republic, 29–30 April 2015; pp. 144–153, ISBN 978-3-319-22383-4. [Google Scholar]
- Arena, P.; Fortuna, L.; Frasca, M.; Patané, L. Learning Anticipation via Spiking Networks: Application to Navigation Control. IEEE Trans. Neural Netw. 2009, 20, 202–216. [Google Scholar] [CrossRef] [PubMed]
- IEC Webstore. IEC 60079-33:2012 Explosive Atmospheres—Part 33: Equipment Protection by Special Protection ‘S’. Available online: https://webstore.iec.ch/publication/652 (accessed on 9 July 2018).
- Czech Office for Standards, Metrology and Testing. ČSN EN 60079-1 ed. 3. Explosive Atmospheres—Part 1: Equipment Protection by Flameproof Enclosure "d"; Czech Office for Standards: Prague, Czech Republic, 2015; p. 68. [Google Scholar]
- Konečný, Z. Evaluating Methods of the Strength Analyzes Results Realize in PTC Creo/Simulation. Appl. Mech. Mater. 2015, 816, 357–362. [Google Scholar] [CrossRef]
- Górny, M. Explosion Pressure Inside Flameproof Electrical Motors in Low Temperatures. Zeszyty Problemowe Maszyny Elektryczne 2008, 80, 99–105. [Google Scholar]
- Górny, M. Gas Explosion Propagation Through Flameproof Induction Motor’s Air Gap. Zeszyty Problemowe Maszyny Elektryczne 2013, 99, 121–127. [Google Scholar]
- Czech Office for Standards, Metrology and Testing. ČSN EN 60079-11 ed. 2. Explosive Atmospheres—Part 11: Equipment Protection by Intrinsic Safety “i”; Czech Office for Standards: Prague, Czech Republic, 2012; p. 132. [Google Scholar]
- Czech Office for Standards, Metrology and Testing. ČSN EN 60079-18 ed. 3. Explosive Atmospheres—Part 18: Equipment Protection by Encapsulation “m”; Czech Office for Standards: Prague, Czech Republic, 2015; p. 36. [Google Scholar]
- Kopex Group. Report on Field Tests of TeleRescuer System [Final Report]. 2018. Available online: http://www.telerescuer.polsl.pl/ (accessed on 2 November 2018).















© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Novák, P.; Kot, T.; Babjak, J.; Konečný, Z.; Moczulski, W.; Rodriguez López, Á. Implementation of Explosion Safety Regulations in Design of a Mobile Robot for Coal Mines. Appl. Sci. 2018, 8, 2300. https://doi.org/10.3390/app8112300
Novák P, Kot T, Babjak J, Konečný Z, Moczulski W, Rodriguez López Á. Implementation of Explosion Safety Regulations in Design of a Mobile Robot for Coal Mines. Applied Sciences. 2018; 8(11):2300. https://doi.org/10.3390/app8112300
Chicago/Turabian StyleNovák, Petr, Tomáš Kot, Jan Babjak, Zdeněk Konečný, Wojciech Moczulski, and Ángel Rodriguez López. 2018. "Implementation of Explosion Safety Regulations in Design of a Mobile Robot for Coal Mines" Applied Sciences 8, no. 11: 2300. https://doi.org/10.3390/app8112300
APA StyleNovák, P., Kot, T., Babjak, J., Konečný, Z., Moczulski, W., & Rodriguez López, Á. (2018). Implementation of Explosion Safety Regulations in Design of a Mobile Robot for Coal Mines. Applied Sciences, 8(11), 2300. https://doi.org/10.3390/app8112300