Experimental Verification of the Dynamic Model of Turbine Blades Coupled by a Sealing Strip



Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. The Test Rig
- The test rig is non-rotating; this allows for accurate control on the excitation force amplitude and phase and accurate measurement of the blades’ response.
- The centrifugal force acting on the strip is simulated by a loading system based on compressed air, so as to avoid contact with the strip. This system is here preferred to a classic contact loading device, as the latter may induce deformation of the strip itself and introduce a spurious system in the blades-strip system.
- Each of the two dummy blades is machined in one-piece. This solution avoids additional interfaces with friction beyond the strip-platforms contact interfaces.
- A clamping hydraulic machine holds the prismatic bases of the blade with a 200 bar pressure so that the blades become one with the big inertial mass of the rig.
- The blades’ platforms in contact with the strip are equipped with a replaceable contact pad (glued to the platform). In this way, different typical blade materials can then be tested independently from the blades.
- Each blade is connected to a shaker, so that both blades can be excited at the same time with a different phase, as in a real engine. The two-blades system at hand can be excited to vibrate along the in-phase (IP) and out-of phase (OOP) modes.
- Each blade is excited with a step-sine force with constant amplitude. A precise control of the force is requested since the system is not linear.
2.1. Compressed Air System
- loads the strip without any contact, mimicking the effect the centrifugal force has on the strip in real working conditions, e.g., no strip deformations due to point-loading;
- produces a uniform pressure between the strip and the platform, with a value of pressure of 0.3 MPa, which is a realistic value of pressure in turbines with strips.
2.2. Excitation System
3. The Experimental Results
3.1. Blades without Strip
3.2. Blades with Strips
- The FRFs of the system with strip are lower in amplitude than the FRFs without strip since globally the strip introduces stiffness and damping in the dynamic system.
- IP motion: since the blades are no longer two separate entities, the two separate peaks (one for each blade) typical of the free condition have been substituted with one peak in the middle of the two. The IP peak (with strip) (Figure 4a) is in the same frequency range of the resonance peak of the free blades (i.e., without strip). The physical explanation of this can be found by observing the relative displacement of the blade platforms during IP blade vibration. As shown in Figure 5, this displacement is mainly vertical and consequently the strip constitutes a quite weak constraint (it may even detach from the platforms during part of the period of vibration). This is further analyzed in Section 5. The result is that the strip influence on the IP mode is quite weak both in terms of damping and stiffening, i.e., the amplitude and position of the peak does not change significantly.
- OOP motion: the OOP peak (Figure 4b) is at higher frequency than the corresponding peak in free (i.e., no strip) condition. Furthermore, the peak appears considerably reduced in amplitude. The explanation can be found again by observing the relative displacement of the blade platforms. As further commented in Section 5.2, the OOP mode sees a purely horizontal relative displacement between platforms. This platform kinematics maximizes the strip damping and stiffening capability.
- sliding in the contact interface increases, thus producing a progressively less stiff system with lowering OOP peaks’ frequency;
- the peaks appear increasingly more rounded since, due to the increasing relative displacement between strip and platform, more damping is introduced in the system.
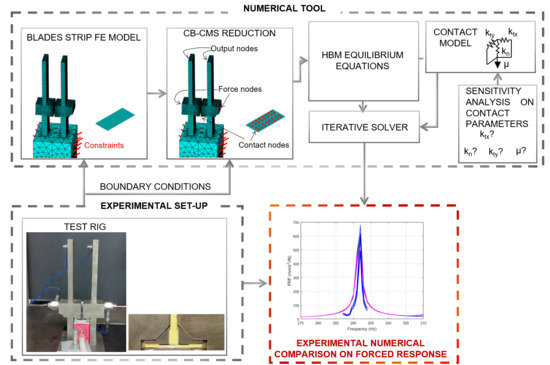
4. The Numerical Model
- Finite Element Models: the blades and the strip are modeled using FE (Finite Elements). In the present case, Ansys Mechanical APDL 16.1 is chosen. No contact is imposed between blades and strip at this stage, therefore the two blades and the strip are handled into two separate files. Nevertheless, the two separate models should have the same reference system and a coincident regular mesh on the contact surfaces.
- Boundary Conditions: the nodes on the base of the blades are constrained (zero displacement along all DOFs) to reproduce the clamping imposed by the hydraulic machine.
- CB-CMS reduction: The size of the two models is reduced by performing a Craig–Bampton Component Mode Synthesis (CB-CMS) reduction [33,34]. This reduction technique requires the selection of master (i.e., physical) and slave (i.e., modal) degrees of freedom. The physical DOFs include:
- two nodes, one for each blade, to apply the shaker excitation force. The nodes are chosen on the outer part of the blade platforms, to replicate the experimental set-up;
- two nodes at the tip of the two blades, in the same position where the accelerometers are placed. These nodes are used to record the blades’ response;
- a total of 200 contact nodes (50 for each of the four contact interfaces on blades and strip). As pointed out in [29], whenever a flexible structure is involved, ensuring an adequate representation of the contact requires a high number of contact nodes.
- Nonlinear simulation. The two reduced models are imported in a Matlab environment (R2016a version, Mathworks, Natick, MA, USA) where a state-of-the-art code is used to compute the nonlinear forced response of the system. A few highlights of the code, closely analyzed in [29] can be found below.
- The multi-Harmonic Balance method is used to solve the nonlinear equilibrium equations in the frequency domain:where the mass and stiffness matrices M and K of the blade strip system come from the CB-CMS reduction. The structural damping of the two bodies, i.e., matrix C is assumed to be modal. The value of modal damping is tuned using the Free curves (i.e., no strip) and here set at 0.0002. The vector contains the two shaker forces, whose amplitude and phase is set equal to those investigated in Section 3.2. The vector contains the nonlinear contact forces.
- At this stage blades and strip should be regarded as a unique system. The node-to-node contact between blades platforms and strip is ensured by a state of the art contact model implementing a normal and a tangential contact spring per node (see also Figure 8). The model is capable of simulating the three fundamental contact states: stick (the nodes are connected by the two springs), slip (the normal spring is still present while the tangential direction moves freely) and lift-off (no contact). The contact parameters’ values influence the result as further commented on in Section 5.2.
- The Jacobian Alert Algorithm, first presented in [35], ensures a fast yet accurate calculation.
5. Numerical Results
5.1. A Warning on the Inadequacy of the Full-Stick Linear Prediction
5.2. Experimental Numerical Comparison
- normal contact stiffness = [84–252] N/m,
- tangential contact stiffness = [56–168] N/m,
- friction coefficient [0.3–0.5].
6. Conclusions
- The blades-strip system response varies significantly depending on the mode of vibration (IP or OOP). If the blades are vibrating “in-phase” (IP), the strip does not stiffen nor damp the blades vibration. If the blades are vibrating “out-of-phase” (OOP), the strip significantly damps and stiffens the blades’ response.
- The experimental observation highlighted at point 2 is confirmed by the numerical predictions and can be easily explained by analyzing the platform kinematics.
- The contact pressure on the strip produced by the centrifugal load is here set at a realistic 0.3 MPa. This value is one order of magnitude lower than contact pressures typically encountered with solid dampers (whose mass may be more than 10 times higher than that of the strip). This causes the strip to slide and detach quite easily even for low values of excitation force on the blades .
- A direct consequence of point 3 is that the full stick linear limit curves typically used in the analysis and design of solid dampers are here not significant as they would largely overestimate the frequency shift produced by the strip. This is observed numerically and proven experimentally and constitutes one of the main findings of this paper.
- The contact parameters used in the simulation come from experimental data on solid dampers (subjected to a contact pressure similar to the strip’s). The sensitivity of the response to variation of contact parameters is moderate in the case of OOP vibration and close to null in case of IP vibration (the case in which the strip’s influence is weak).
Author Contributions
Funding
Conflicts of Interest
References
- Yang, B.D.; Chen, J.J.; Menq, C.H. Prediction of resonant response of shrouded blades with three-dimensional shroud constraint. J. Eng. Gas Turbines Power 1999, 121, 523–529. [Google Scholar] [CrossRef]
- Shi, Y.; Hong, J.; Shan, Y.; Zhu, Z. Forced response analysis of shrouded blades by an alternating frequency/time domain method. In Proceedings of the ASME Turbo Expo 2006: Power for Land, Sea, and Air, Volume 5: Marine; Microturbines and Small Turbomachinery; Oil and Gas Applications; Structures and Dynamics, Parts A and B, Barcelona, Spain, 8–11 May 2006. [Google Scholar]
- Szwedowicz, J.; Visser, R.; Sextro, W.; Masserey, P.A. On nonlinear forced vibration of shrouded turbine blades. J. Turbomach. 2008, 130, 011002. [Google Scholar] [CrossRef]
- Siewert, C.; Panning, L.; Wallaschek, J.; Richter, C. Multiharmonic forced response analysis of a turbine blading coupled by nonlinear contact forces. J. Eng. Gas Turbines Power 2010, 132, 082501. [Google Scholar] [CrossRef]
- Zucca, S.; Firrone, C.M.; Gola, M.M. Numerical assessment of friction damping at turbine blade root joints by simultaneous calculation of the static and dynamic contact loads. Nonlinear Dyn. 2011, 67, 1943–1955. [Google Scholar] [CrossRef]
- Gu, W.; Xu, Z.; Liu, Y. A method to predict the non-linear vibratory response of bladed disc system with shrouded dampers. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2011, 226, 1620–1632. [Google Scholar] [CrossRef]
- Mitra, M.; Zucca, S.; Epureanu, B. Adaptive microslip projection for reduction of frictional and contact nonlinearities in shrouded blisks. J. Comput. Nonlinear Dyn. 2016, 11, 041016. [Google Scholar] [CrossRef]
- Pourkiaee, S.M.; Zucca, S. A reduced order model for nonlinear dynamics of mistuned bladed disks with shroud friction contacts. In Proceedings of the ASME Turbo Expo 2018: Turbomachinery Technical Conference and Exposition, Volume 7C: Structures and Dynamics, Oslo, Norway, 11–15 June 2018. [Google Scholar]
- Hartung, A.; Hackenberg, H.P.; Krack, M.; Gross, J.; Heinze, T.; von Scheidt, L.P. Rig and engine validation of the non-linear forced response analysis performed by the tool OrAgl. J. Eng. Gas Turbines Power 2018, 141, 021019. [Google Scholar] [CrossRef]
- Panning, L.; Sextro, W.; Popp, K. Optimization of interblade friction damper design. In Proceedings of the ASME Turbo Expo 2000: Power for Land, Sea, and Air, Volume 4: Manufacturing Materials and Metallurgy; Ceramics; Structures and Dynamics; Controls, Diagnostics and Instrumentation; Education, Munich, Germany, 8–11 May 2000. [Google Scholar]
- Panning, L.; Sextro, W.; Popp, K. Spatial dynamics of tuned and mistuned bladed disks with cylindrical and wedge-shaped friction dampers. Int. J. Rotat. Mach. 2003, 9, 219–228. [Google Scholar] [CrossRef]
- Petrov, E.P.; Ewins, D.J. Advanced modeling of underplatform friction dampers for analysis of bladed disk vibration. J. Turbomach. 2007, 129, 143–150. [Google Scholar] [CrossRef]
- Berruti, T.; Firrone, C.; Pizzolante, M.; Gola, M. Fatigue damage prevention on turbine blades: Study of underplatform damper shape. Key Eng. Mater. 2007, 347, 159–164. [Google Scholar] [CrossRef]
- Berruti, T. A test rig for the investigation of the dynamic response of a bladed disk with underplatform dampers. Mech. Res. Commun. 2010, 37, 581–583. [Google Scholar] [CrossRef]
- Sever, I.; Petrov, E.; Ewins, D. Experimental and numerical investigation of rotating bladed disk forced response using underplatform friction dampers. ASME J. Eng. Gas Turbines Power 2008, 130, 042503. [Google Scholar] [CrossRef]
- Firrone, C.M.; Berruti, T.M.; Gola, M.M. On force control of an engine order-type excitation applied to a bladed disk with underplatform dampers. J. Vib. Acoust. 2013, 135, 041103. [Google Scholar] [CrossRef]
- Botto, D.; Gastadi, C.; Gola, M.M.; Umer, M. An experimental investigation of the dynamics of a blade with two under-platform dampers. J. Eng. Gas Turbines Power 2017, 140, 032504. [Google Scholar] [CrossRef]
- Pesaresi, L.; Salles, L.; Jones, A.; Green, J.; Schwingshackl, C. Modelling the nonlinear behaviour of an underplatform damper test rig for turbine applications. Mech. Syst. Signal Process. 2017, 85, 662–679. [Google Scholar] [CrossRef]
- Šanliturk, K.; Ewins, D.; Stanbridge, A. Underplatform dampers for turbine blades: Theoretical modelling, analysis and comparison with experimental data. J. Eng. Gas Turbine Power 2001, 123, 919–929. [Google Scholar] [CrossRef]
- Panning, L.; Popp, K.; Sextro, W.; Götting, F.; Kayser, A.; Wolter, I. Asymmetrical underplatform dampers in gas turbine bladings: Theory and application. In Proceedings of the ASME Turbo Expo 2004: Power for Land, Sea, and Air Volume 6: Turbo Expo 2004, Vienna, Austria, 14–17 June 2004. [Google Scholar]
- Zucca, S.; Borrajo, J.; Gola, M. Forced response of bladed disks in cyclic symmetry with underplatform dampers. In Proceedings of the ASME Turbo Expo 2006: Power for Land, Sea, and Air, Volume 5: Marine; Microturbines and Small Turbomachinery; Oil and Gas Applications; Structures and Dynamics, Parts A and B, Barcelona, Spain, 8–11 May 2006. [Google Scholar]
- Koh, K.H.; Griffin, J.H. Dynamic behavior of spherical friction dampers and its implication to damper contact stiffness. J. Eng. Gas Turbines Power 2007, 129, 511–521. [Google Scholar] [CrossRef]
- Berruti, T.; Firrone, C.; Gola, M. A test rig for noncontact traveling wave excitation of a bladed disk with underplatform dampers. J. Eng. Gas Turbines Power 2011, 133, 1–7. [Google Scholar] [CrossRef]
- Gastaldi, C.; Berruti, T.M.; Gola, M.M. Best practices for underplatform damper designers. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 1221–1235. [Google Scholar] [CrossRef]
- Botto, D.; Umer, M. A novel test rig to investigate under-platform damper dynamics. Mech. Syst. Signal Process. 2018, 100, 344–359. [Google Scholar] [CrossRef]
- Hüls, M.; von Scheidt, L.P.; Wallaschek, J. Influence of geometric design parameters onto vibratory response and HCF safety for turbine blades with friction damper. In Proceedings of the ASME Turbo Expo 2018: Turbomachinery Technical Conference and Exposition, Volume 7C: Structures and Dynamics, Oslo, Norway, 11–15 June 2018. [Google Scholar]
- Gastaldi, C.; Gola, M.M. Criteria for best performance of pre-optimized solid dampers. In Proceedings of the ASME Turbo Expo 2018: Turbomachinery Technical Conference and Exposition, Volume 7C: Structures and Dynamics, Oslo, Norway, 11–15 June 2018. [Google Scholar]
- Afzal, M.; Arteaga, I.L.; Kari, L. An analytical calculation of the Jacobian matrix for 3D friction contact model applied to turbine blade shroud contact. Comput. Struct. 2016, 177, 204–217. [Google Scholar] [CrossRef]
- Gastaldi, C.; Fantetti, A.; Berruti, T. Forced response prediction of turbine blades with flexible dampers: The impact of engineering modelling choices. Appl. Sci. 2017, 8, 34. [Google Scholar] [CrossRef]
- Fantetti, A.; Gastaldi, C.; Berruti, T. Modeling and testing friction flexible dampers: Challenges and peculiarities. Exp. Tech. 2018, 42, 407–419. [Google Scholar] [CrossRef]
- Battiato, G.; Firrone, C.; Berruti, T. Forced response of rotating bladed disks: Blade Tip-Timing measurements. Mech. Syst. Signal Process. 2017, 85, 912–926. [Google Scholar] [CrossRef]
- Rigosi, G.; Battiato, G.; Berruti, T.M. Synchronous vibration parameters identification by tip timing measurements. Mech. Res. Commun. 2017, 79, 7–14. [Google Scholar] [CrossRef]
- Craig, R.R.; Bampton, M.C.C. Coupling of substructures for dynamic analyses. AIAA J. 1968, 6, 1313–1319. [Google Scholar]
- Battiato, G.; Firrone, C.; Berruti, T.; Epureanu, B. Reduced order modeling for multi-stage coupling of cyclic symmetric structures. In Proceedings of the ISMA 2016—International Conference on Noise and Vibration Engineering and USD2016—International Conference on Uncertainty in Structural Dynamics, Leuven, Belgium, 17–19 September 2016. [Google Scholar]
- Gastaldi, C.; Berruti, T.M. A method to solve the efficiency-accuracy trade-off of multi-harmonic balance calculation of structures with friction contacts. Int. J. Non-Linear Mech. 2017, 92, 25–40. [Google Scholar] [CrossRef]
- Botto, D.; Lavella, M.; Gola, M.M. Measurement of contact parameters of flat on flat contact surfaces at high temperature. In Proceedings of the ASME Turbo Expo 2012: Turbine Technical Conference and Exposition, Volume 7: Structures and Dynamics, Parts A and B, Copenhagen, Denmark, 11–15 June 2012. [Google Scholar]
- Artetxe, E.; González, H.; Calleja, A.; Valdivielso, A.F.; Polvorosa, R.; Lamikiz, A.; Lacalle, L.N.L.D. Optimised methodology for aircraft engine IBRs five-axis machining process. Int. J. Mechatron. Manuf. Syst. 2016, 9, 385. [Google Scholar] [CrossRef]
- González, H.; Calleja, A.; Pereira, O.; Ortega, N.; de Lacalle, L.L.; Barton, M. Super abrasive machining of integral rotary components using grinding flank tools. Metals 2018, 8, 24. [Google Scholar] [CrossRef]
- Gastaldi, C.; Gola, M.M. Testing, simulating and understanding under-platform damper dynamics. In Proceedings of the VII European Congress on Computational Methods in Applied Sciences and Engineering (ECCOMAS 2016), Crete, Greece, 5–10 June 2016. [Google Scholar]
- Allara, M. A model for the characterization of friction contacts in turbine blades. J. Sound Vib. 2009, 320, 527–544. [Google Scholar] [CrossRef]
- Botto, D.; Lavella, M. A numerical method to solve the normal and tangential contact problem of elastic bodies. Wear 2015, 330–331, 629–635. [Google Scholar] [CrossRef]
- Schwingshackl, C.; Petrov, E.; Ewins, D. Measured and estimated friction interface parameters in a nonlinear dynamic analysis. Mech. Syst. Signal Process. 2012, 28, 574–584. [Google Scholar] [CrossRef]
- Lavella, M.; Botto, D.; Gola, M.M. Test rig for wear and contact parameters extraction for flat-on-flat contact surfaces. In Proceedings of the ASME/STLE 2011 Joint Tribology Conference, Los Angeles, CA, USA, 24–26 October 2011. [Google Scholar]
- Gola, M.; Gastaldi, C. Understanding complexities in underplatform damper mechanics. In Proceedings of the ASME Turbo Expo 2014: Turbine Technical Conference and Exposition, Volume 7A: Structures and Dynamics, Düsseldorf, Germany, 16–20 June 2014. [Google Scholar]










© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gastaldi, C.; Berruti, T.M. Experimental Verification of the Dynamic Model of Turbine Blades Coupled by a Sealing Strip. Appl. Sci. 2018, 8, 2174. https://doi.org/10.3390/app8112174
Gastaldi C, Berruti TM. Experimental Verification of the Dynamic Model of Turbine Blades Coupled by a Sealing Strip. Applied Sciences. 2018; 8(11):2174. https://doi.org/10.3390/app8112174
Chicago/Turabian StyleGastaldi, Chiara, and Teresa M. Berruti. 2018. "Experimental Verification of the Dynamic Model of Turbine Blades Coupled by a Sealing Strip" Applied Sciences 8, no. 11: 2174. https://doi.org/10.3390/app8112174
APA StyleGastaldi, C., & Berruti, T. M. (2018). Experimental Verification of the Dynamic Model of Turbine Blades Coupled by a Sealing Strip. Applied Sciences, 8(11), 2174. https://doi.org/10.3390/app8112174