Agile Attitude Control and Singularity Avoidance/Escape by the SDRE Method Using a Biased State-Dependent Weighting Matrix


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Modeling
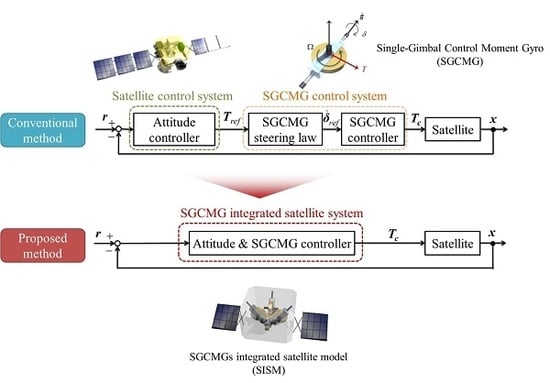
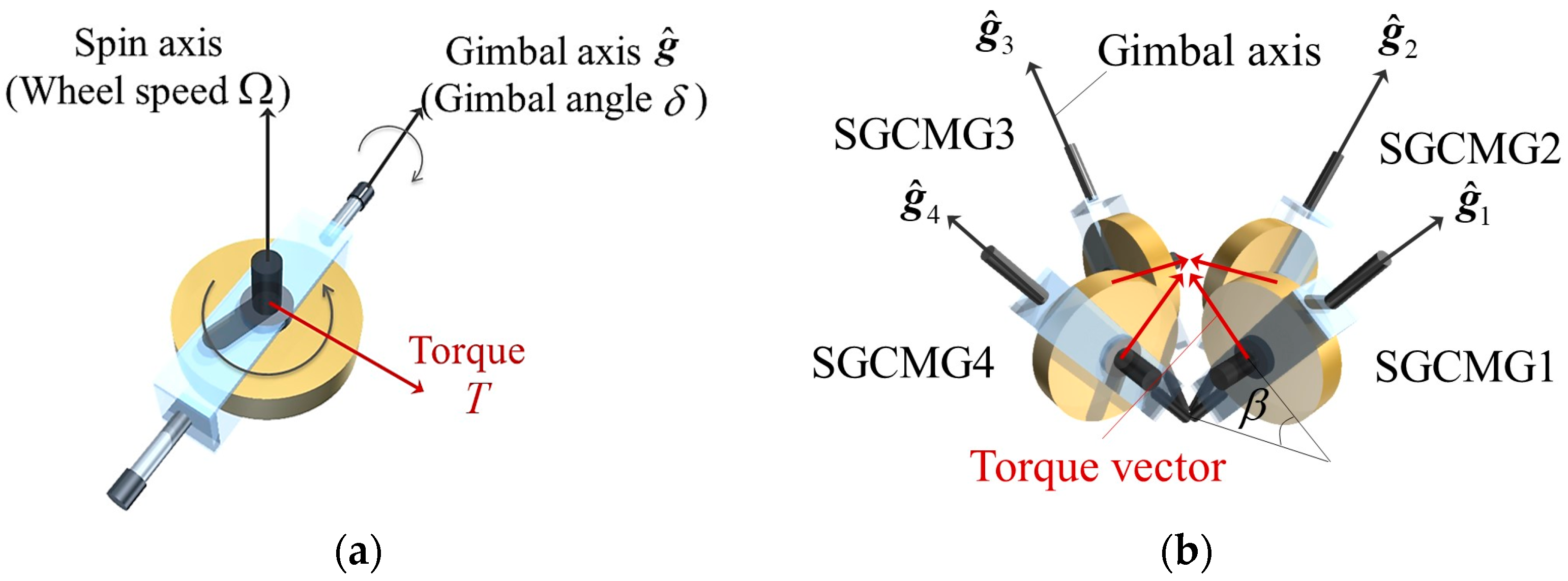
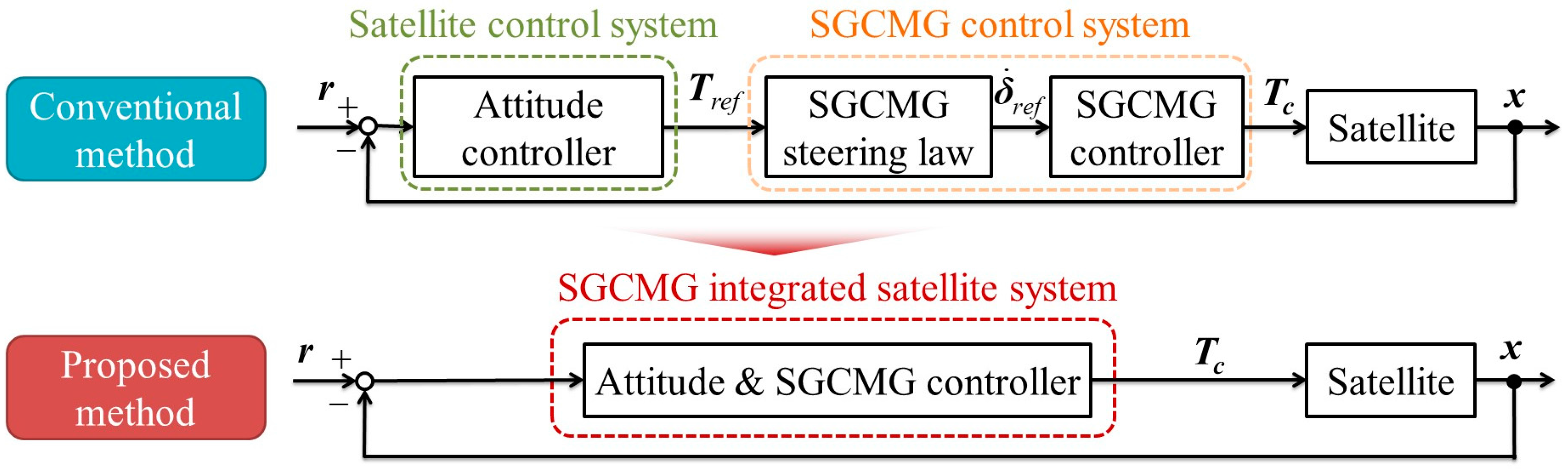
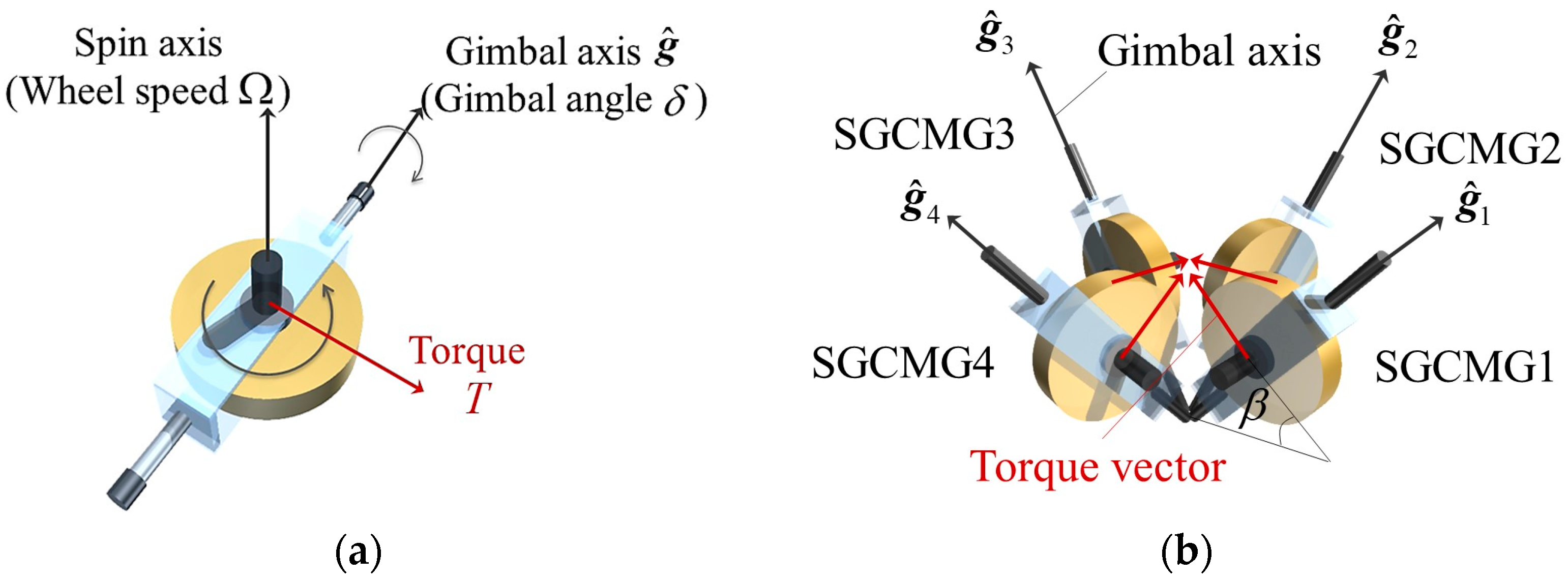
2.1.1. Formulation of Satellite Attitude Maneuvers Using SGCMG
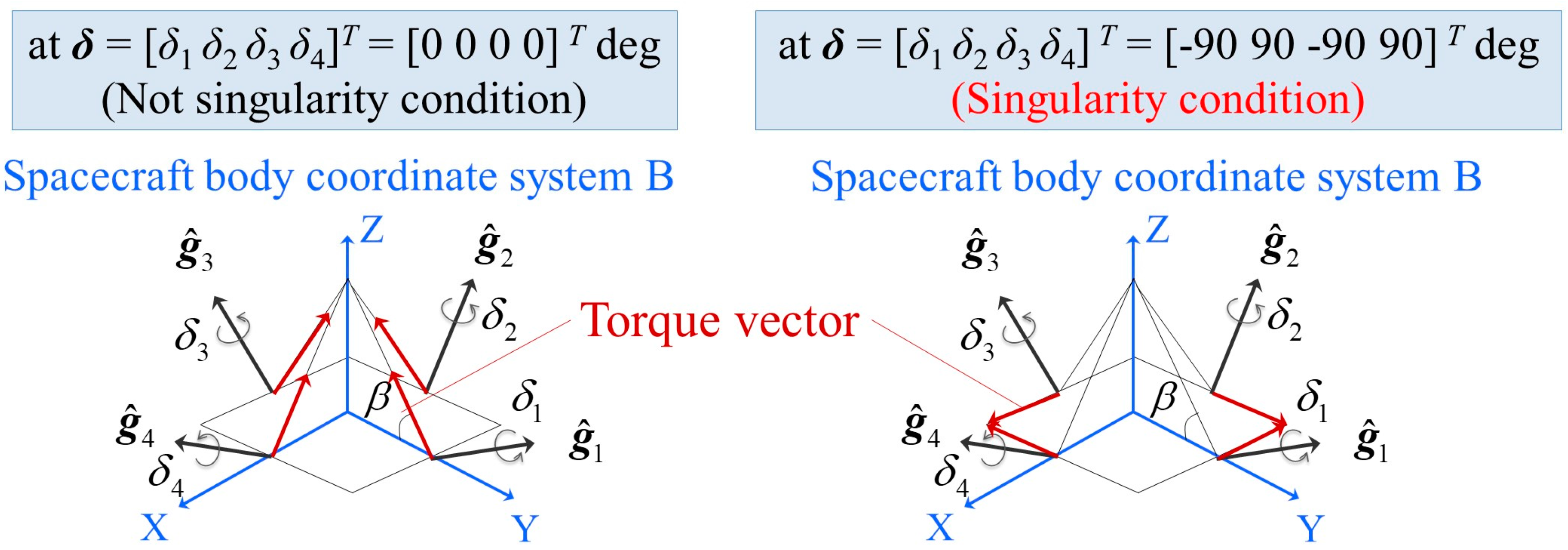
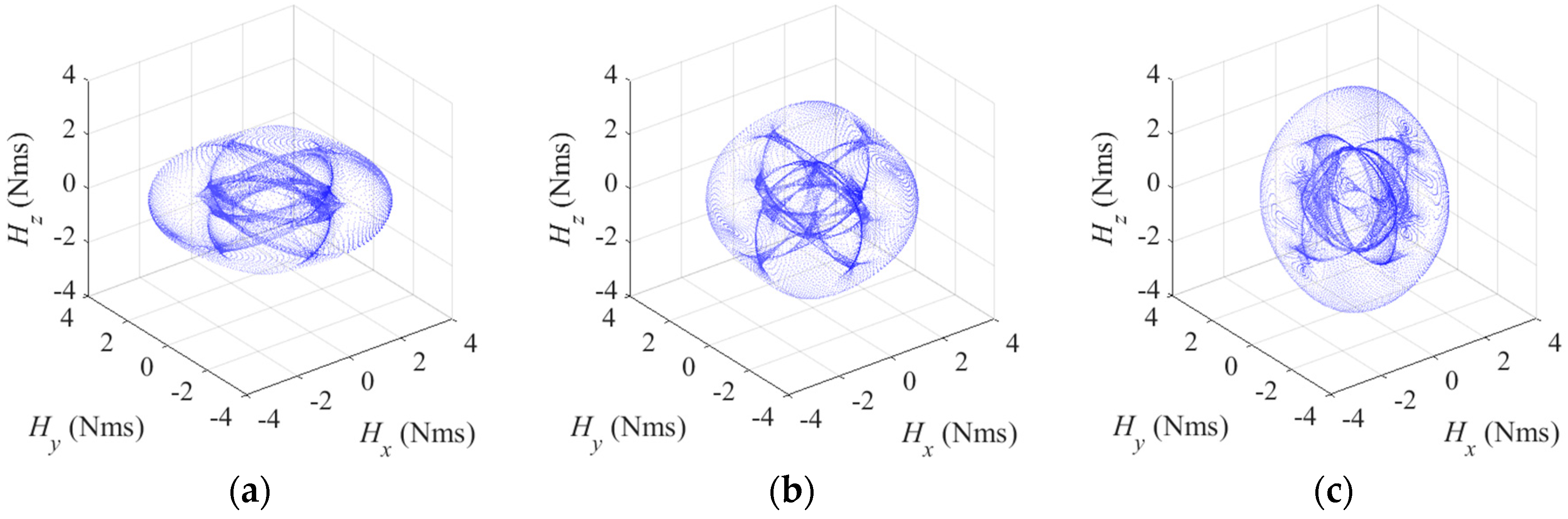
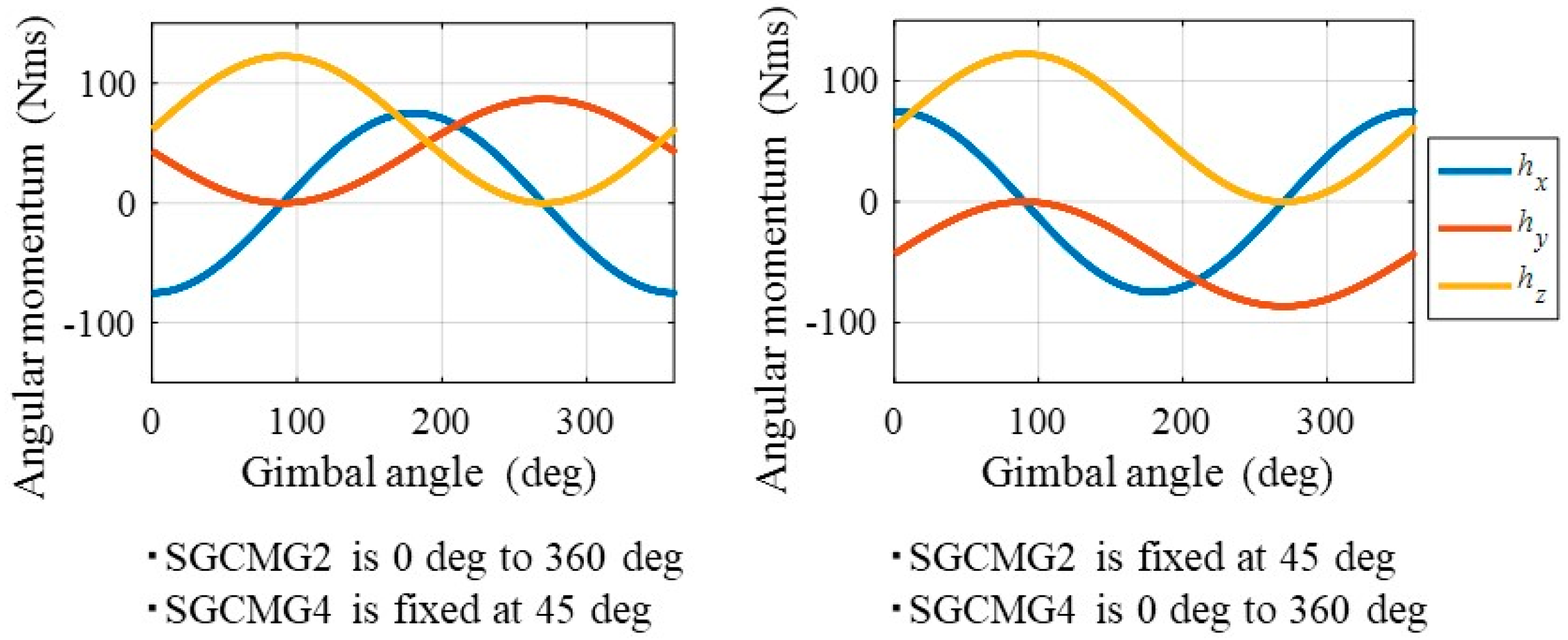
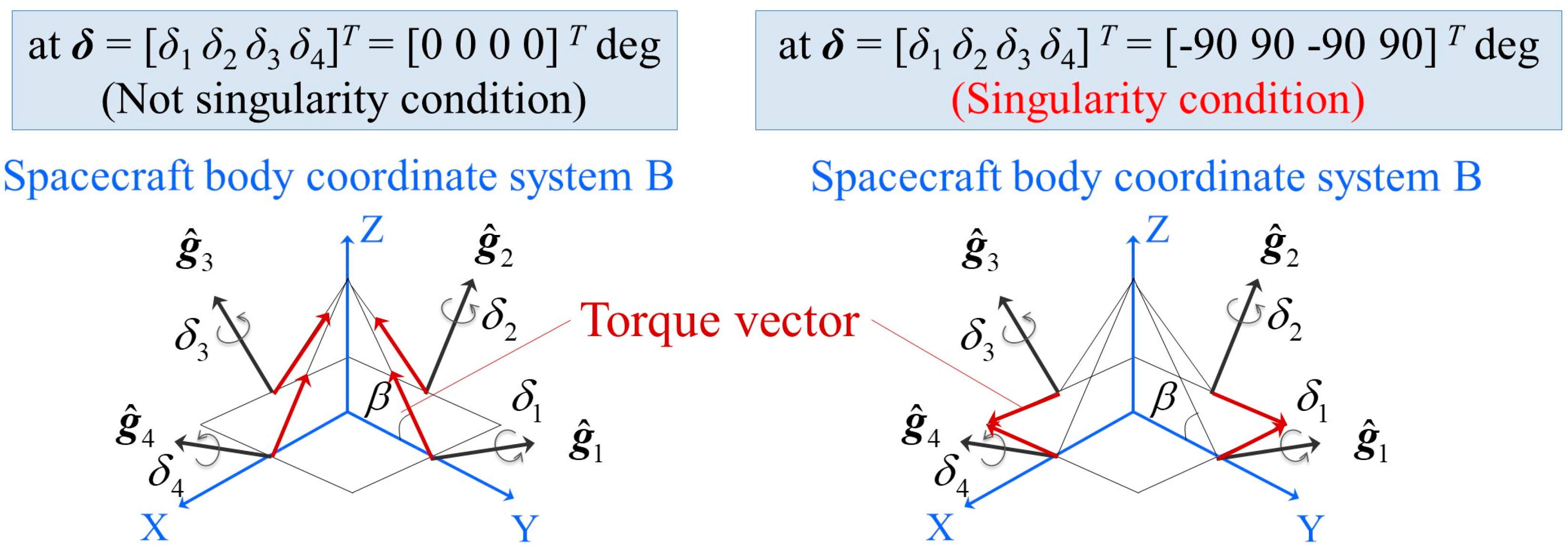
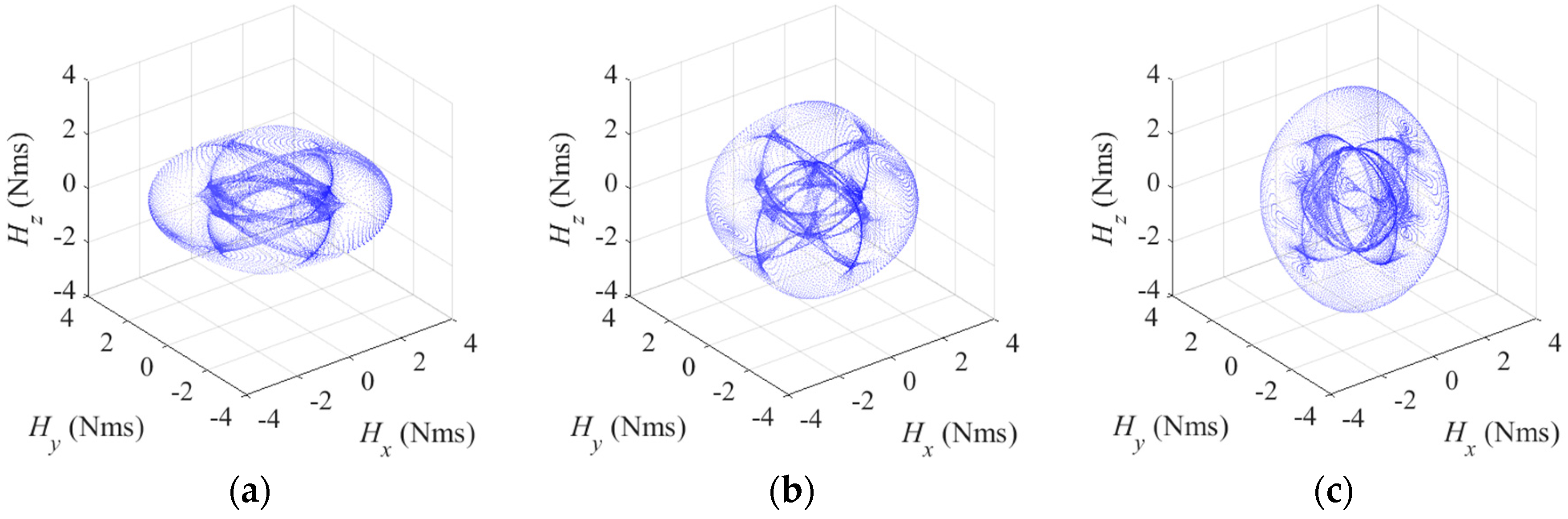
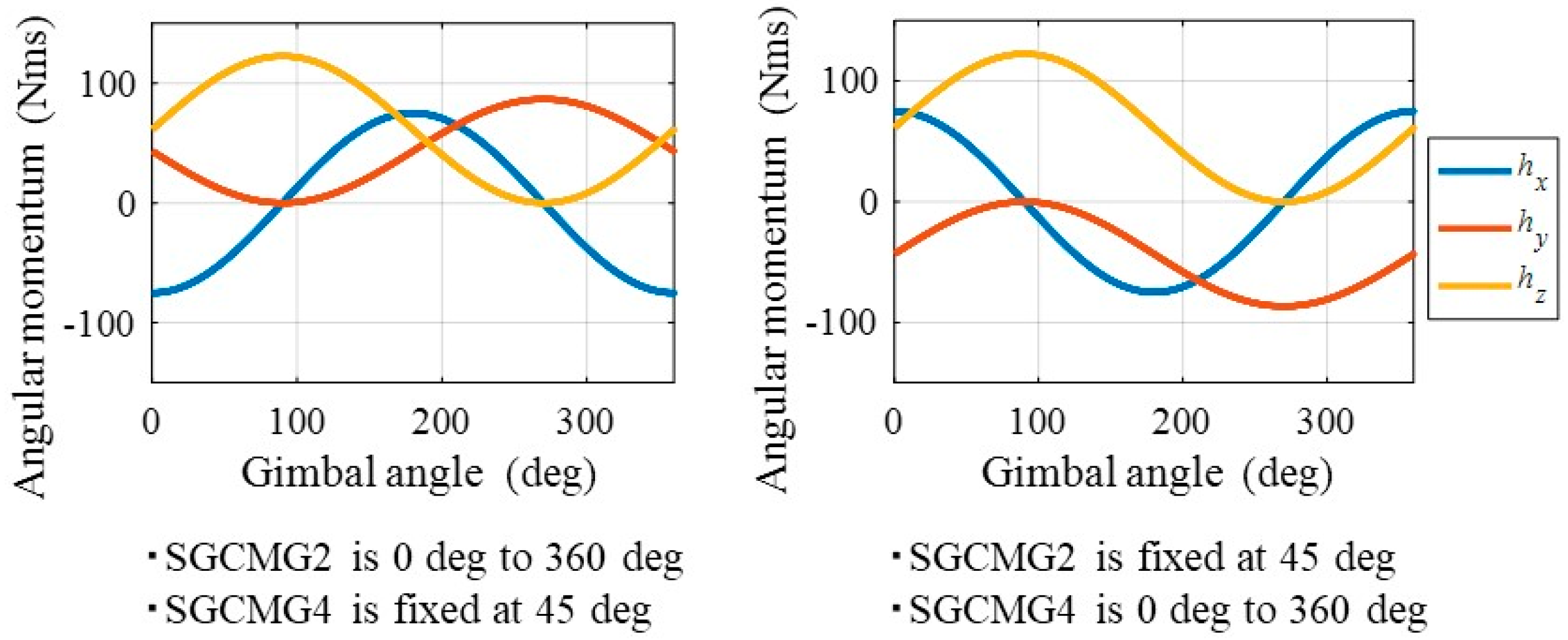
2.1.2. Singularity Problem of SGCMGs
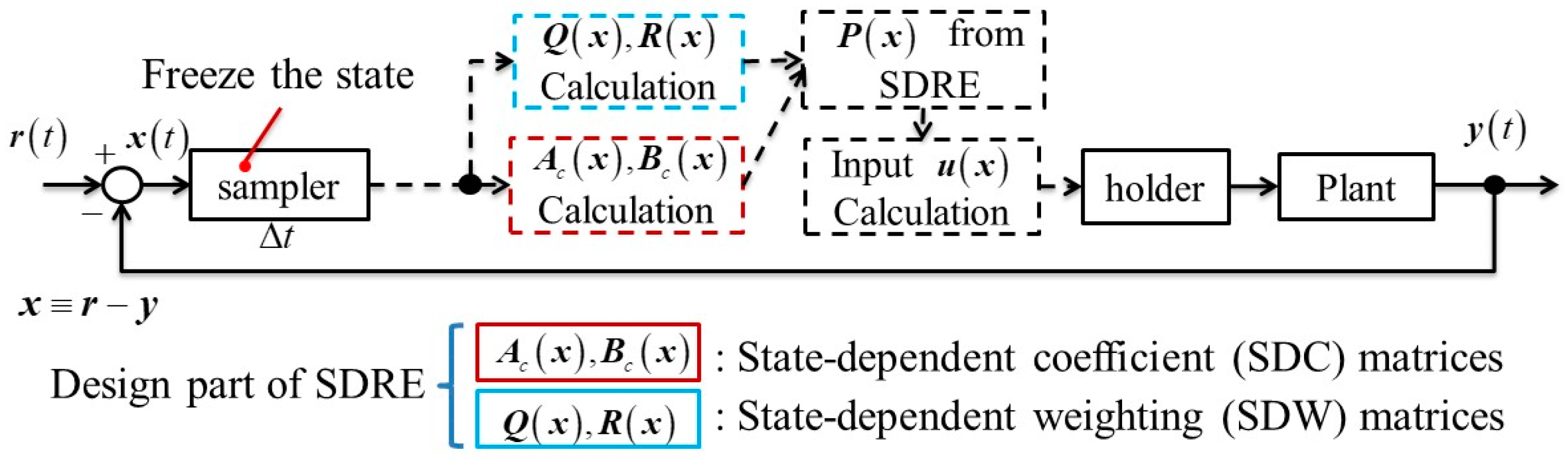
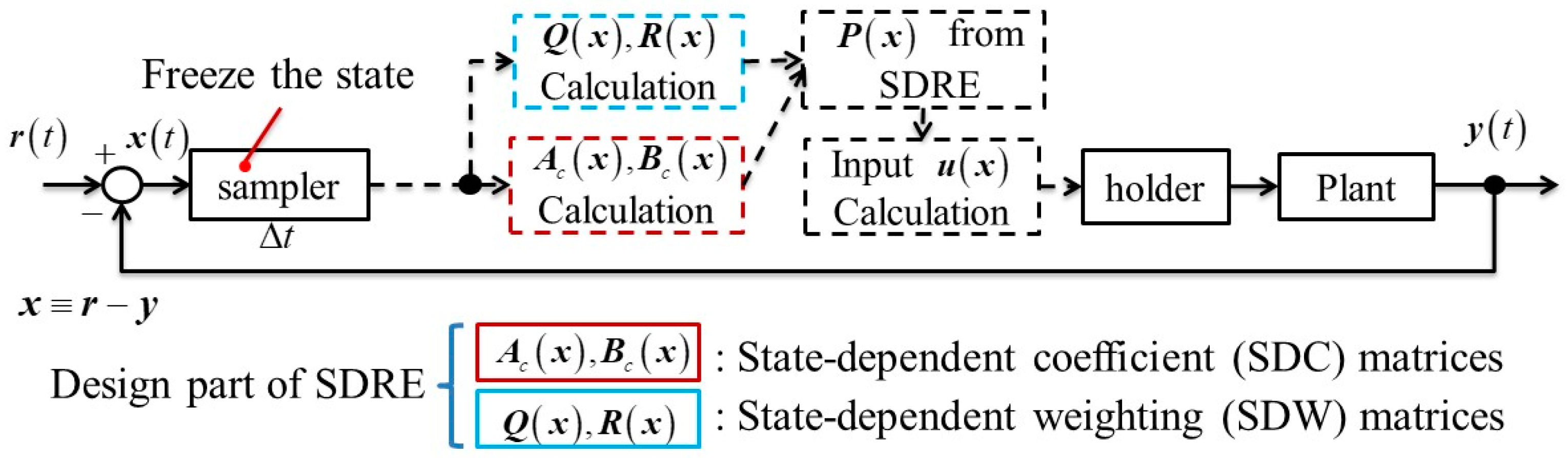
2.2. The State-Dependent Riccati Equation (SDRE) Method
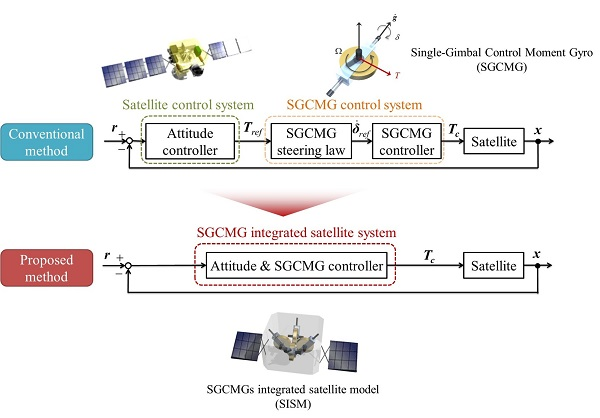
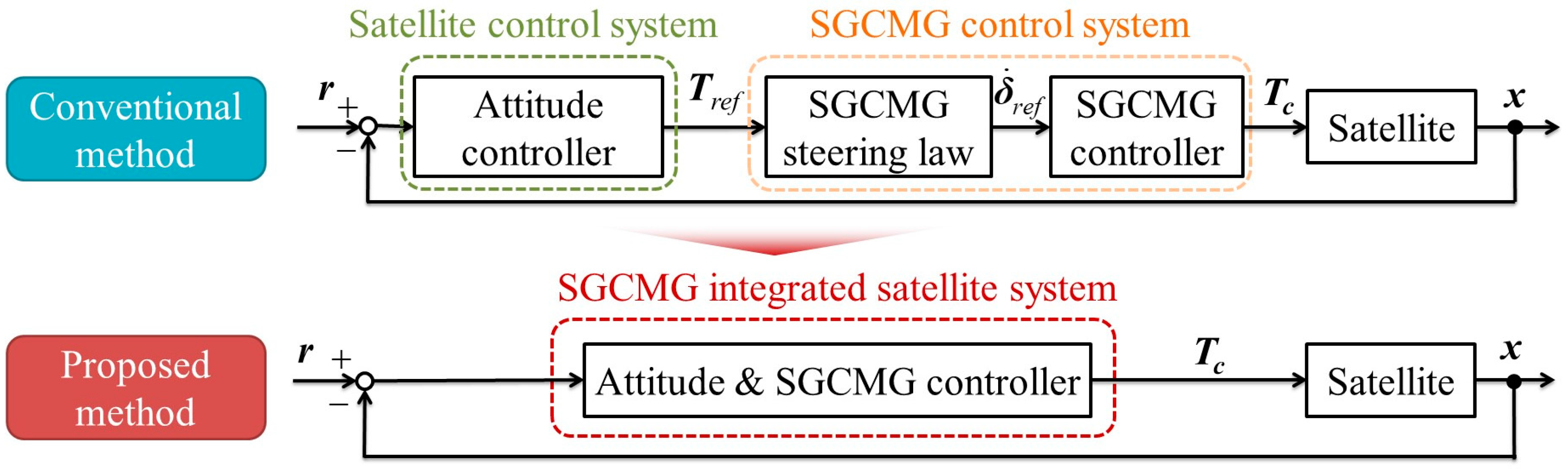
2.3. Design of Proposed Control System
2.3.1. Design of the SGCMG-Integrated Satellite Model (SISM)
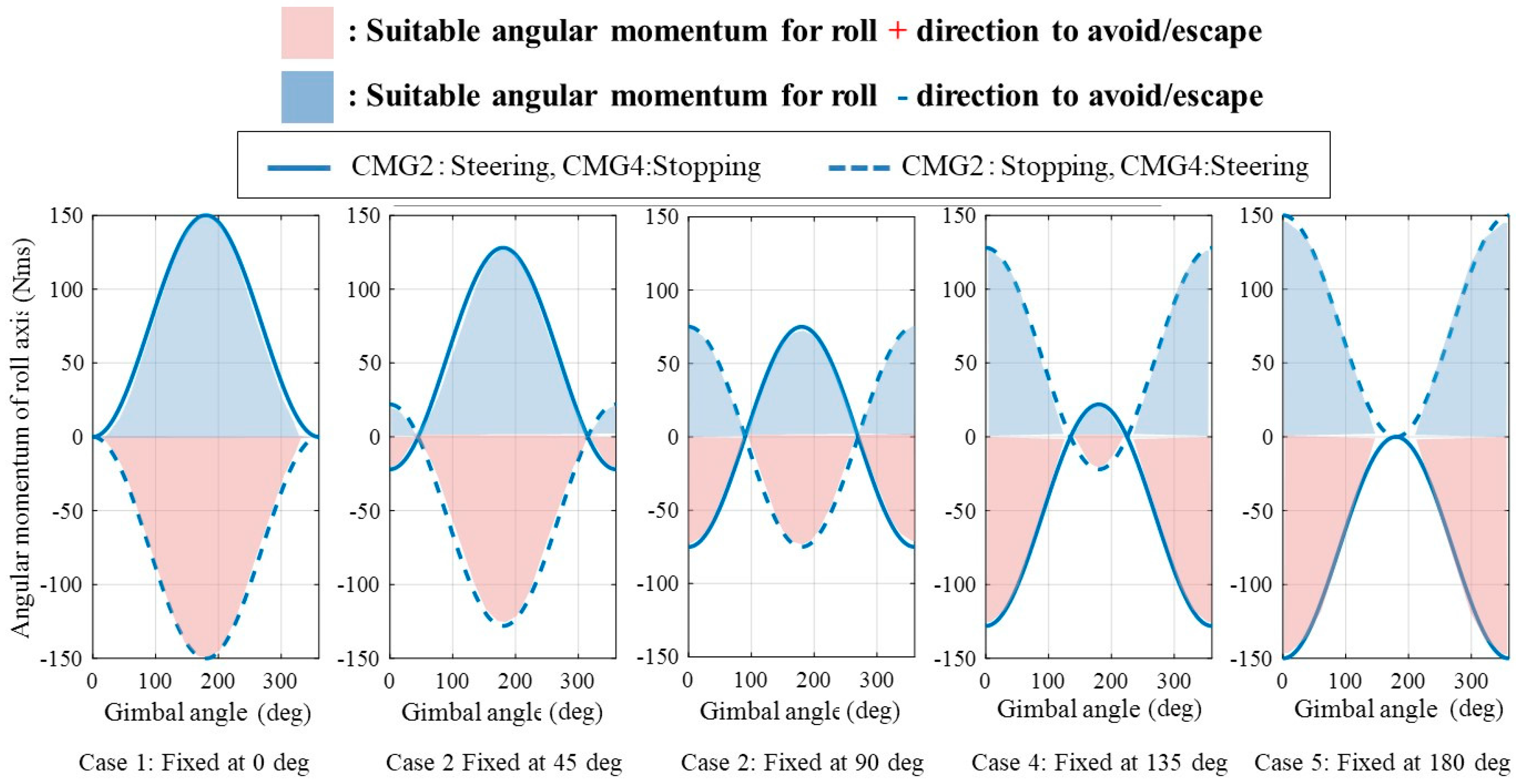
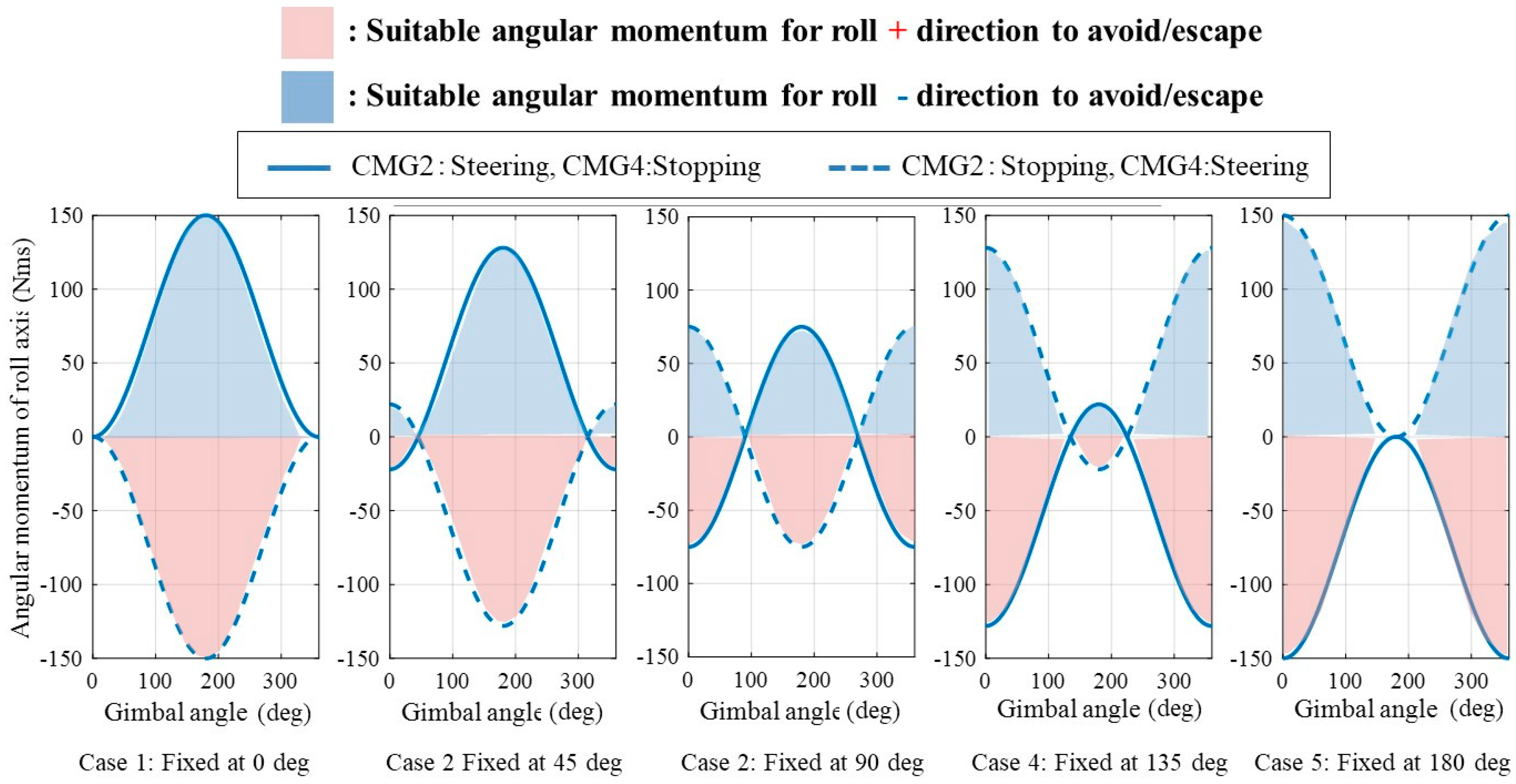
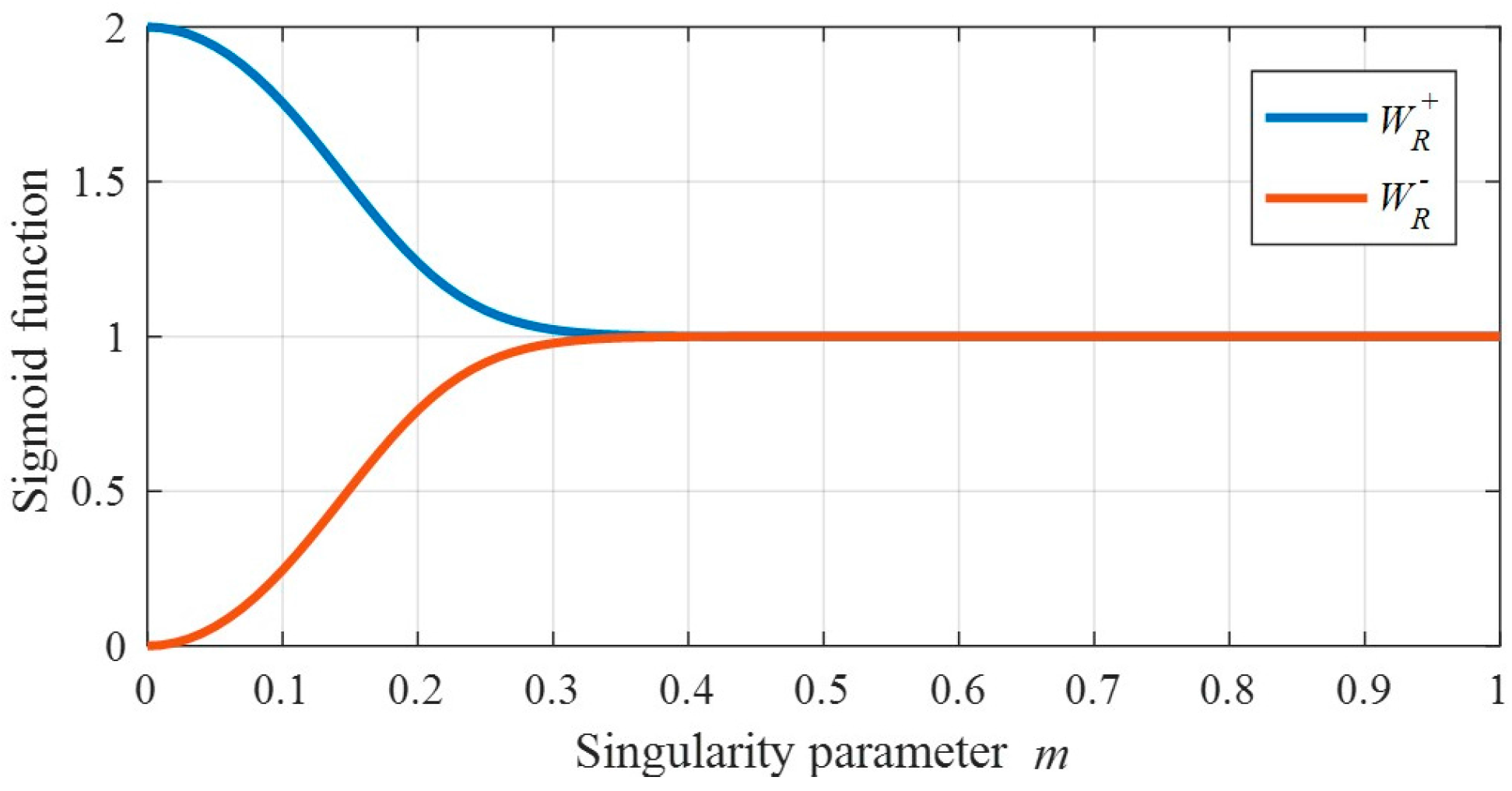
2.3.2. Design of Biased State-Dependent Weighting (BSDW) Matrix of Input
2.3.3. Design of State-Dependent Weighting (SDW) Matrix of State
3. Results and Discussion
3.1. Conditions for Numerical Simulation of Comparison with the Conventional Method
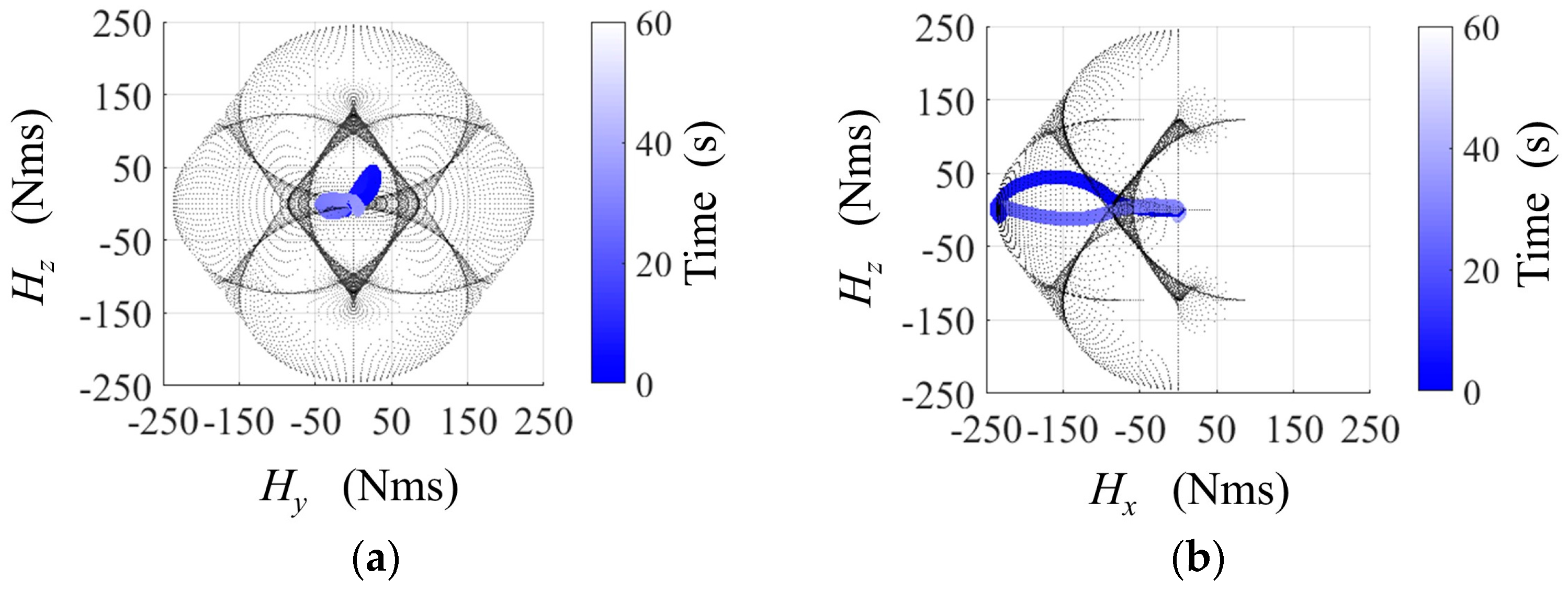
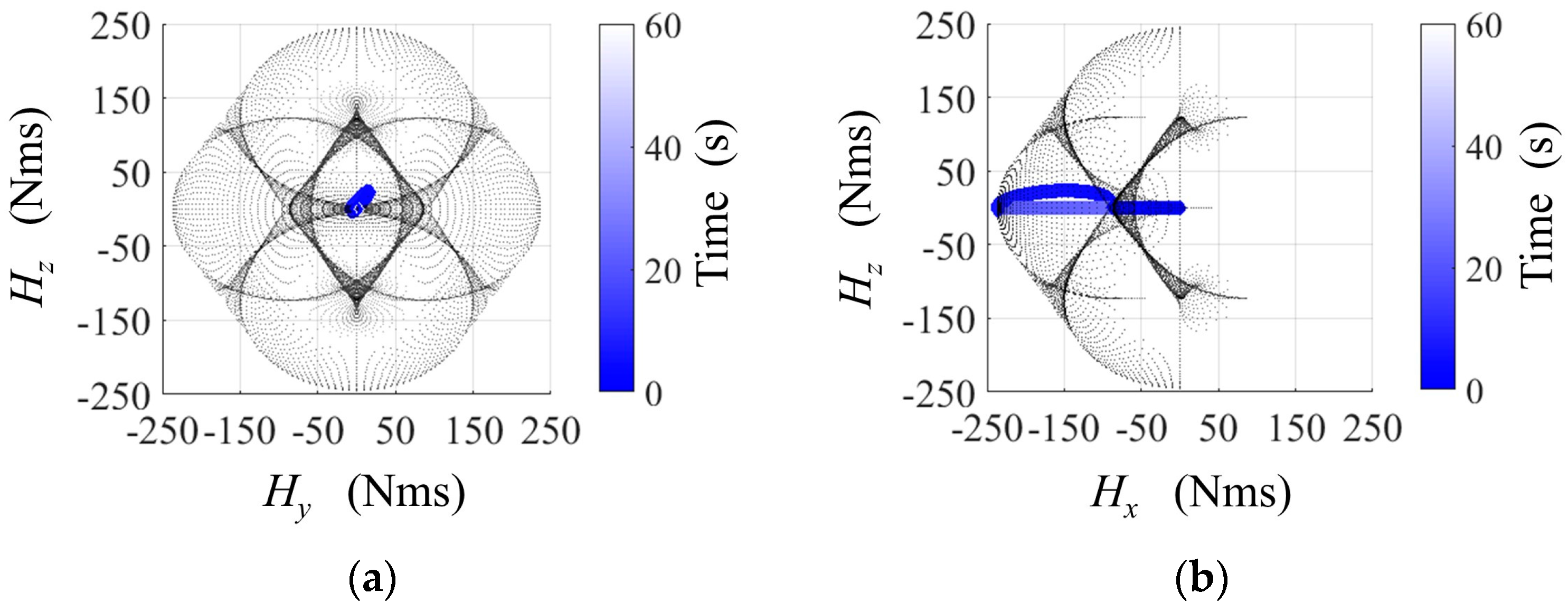
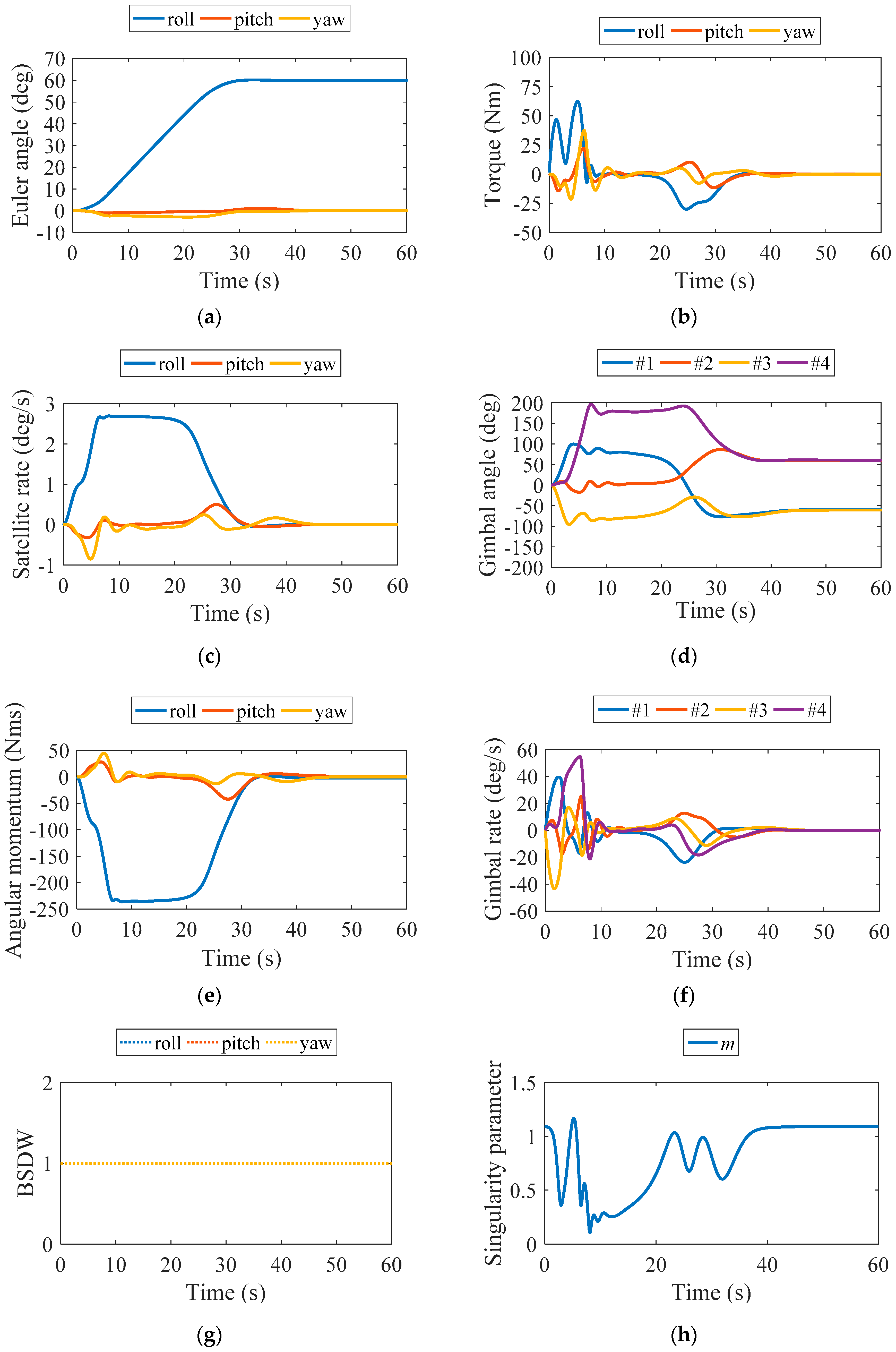
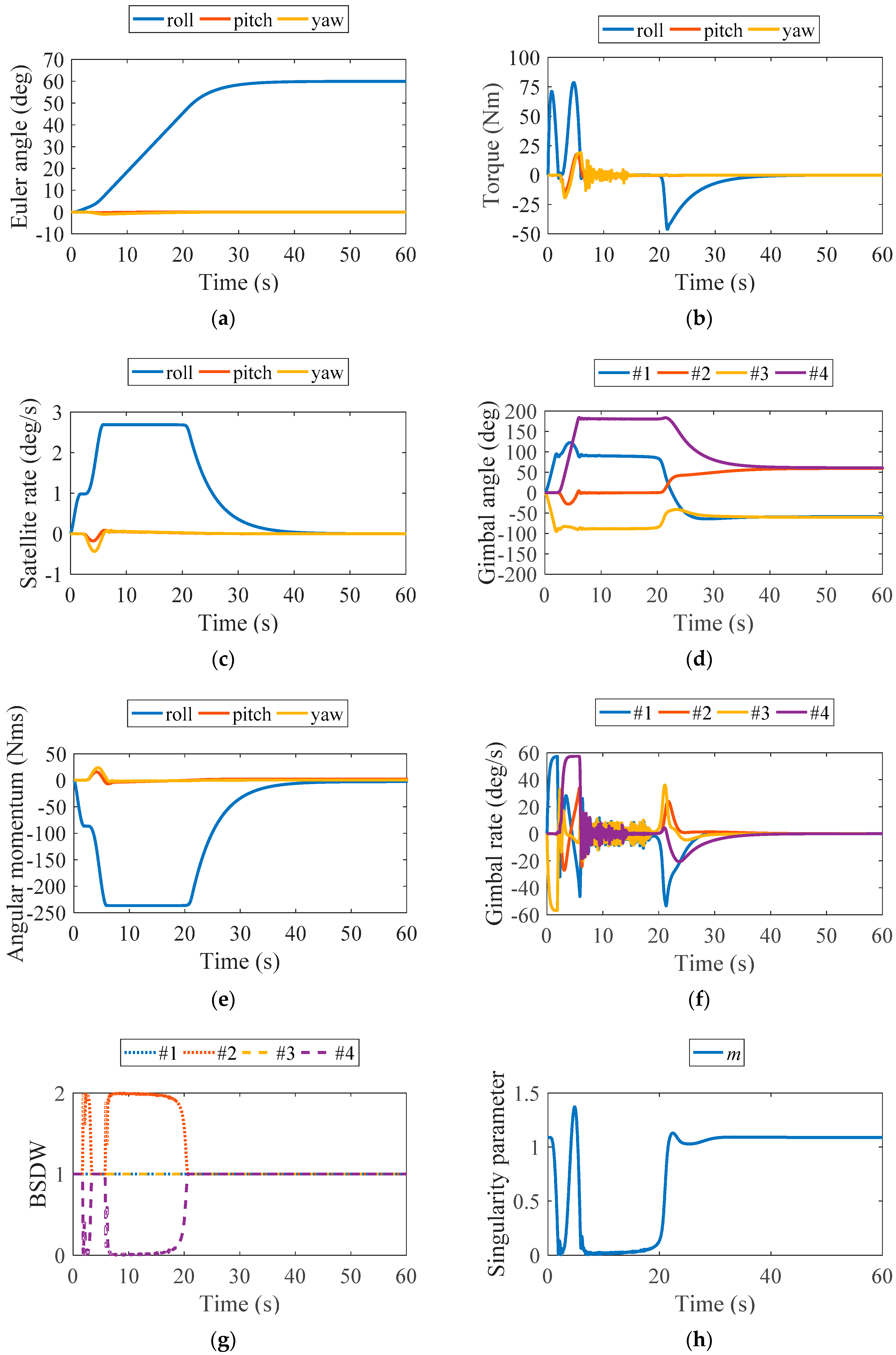
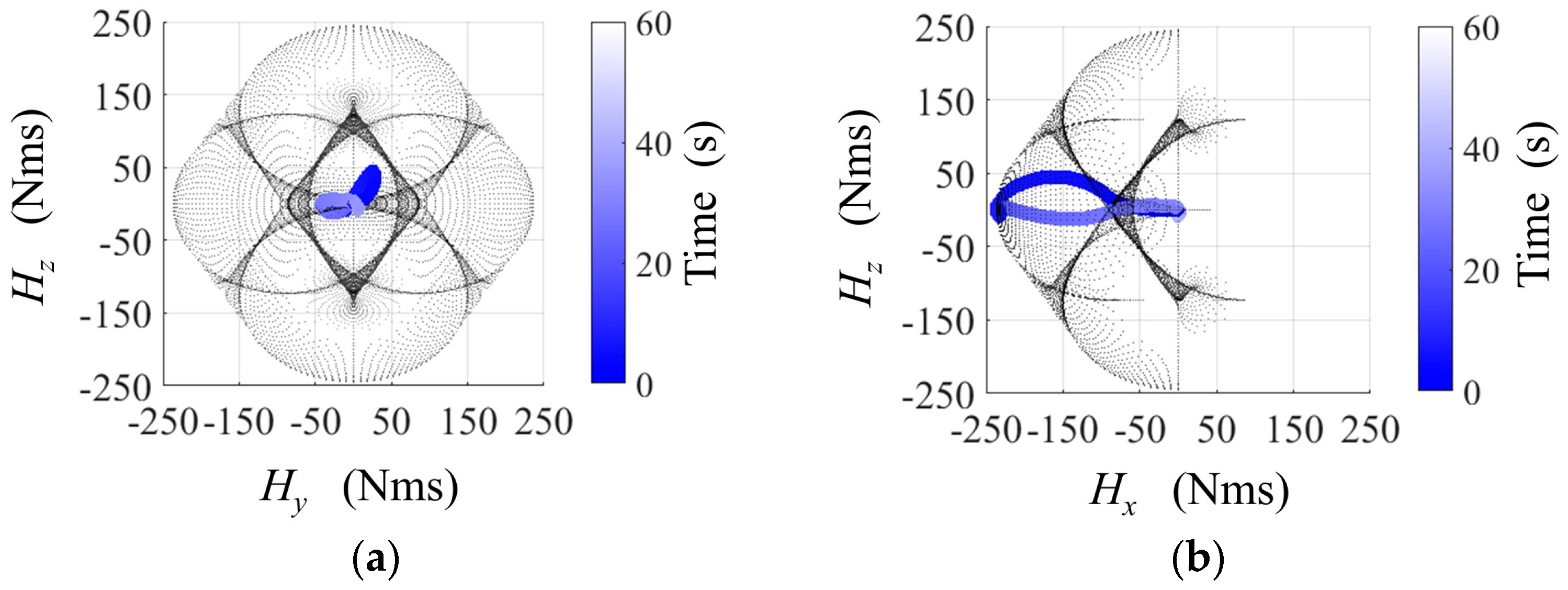
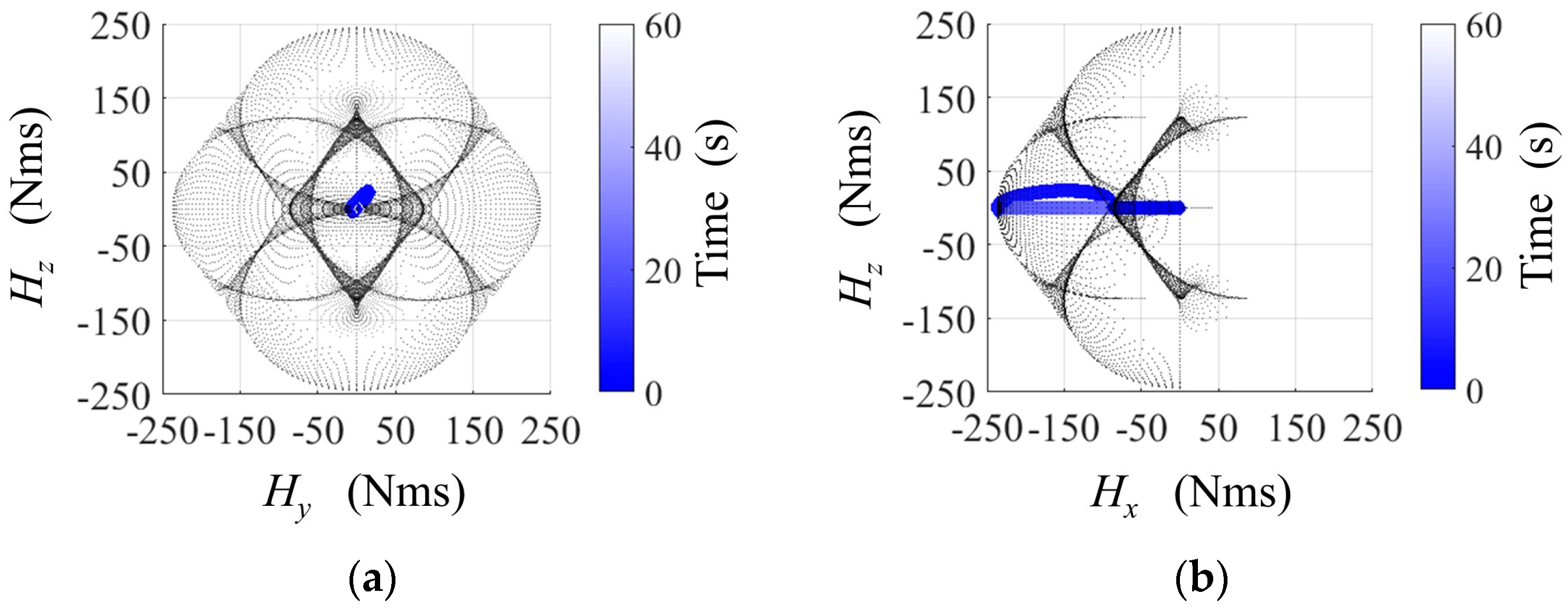
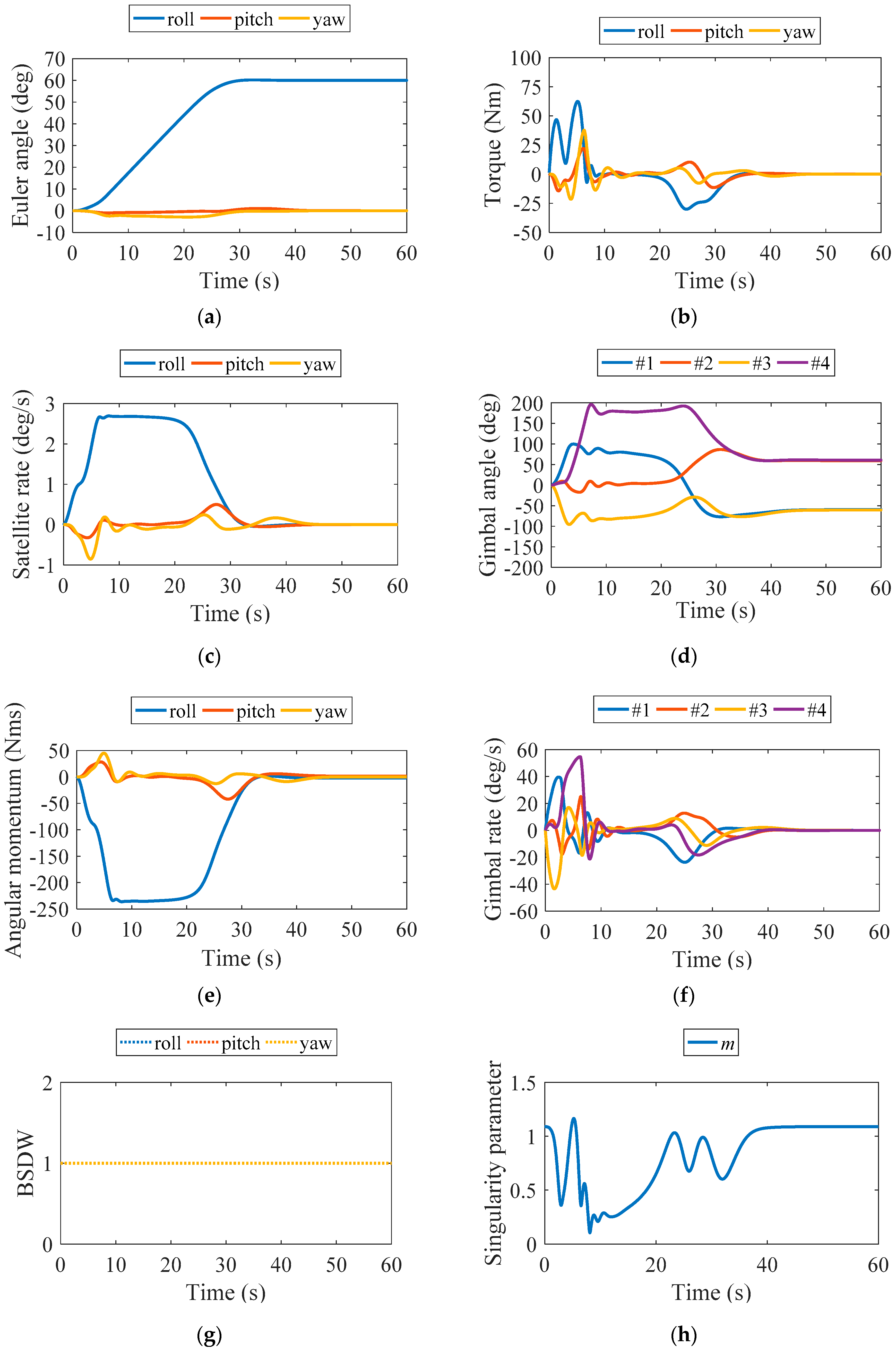
3.2. Results of Numerical Simulation of Comparison with the Conventional Method
3.3. Conditions for Numerical Simulation with Respect to an Uncertainty of the Plant
3.4. Results of Numerical Simulation with Respect to an Uncertainty of the Plant
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Wheel speed of the SGCMG | |
| Gimbal axis vector of the SGCMG | |
| i-th gimbal axis vector of the SGCMG (i = 1, 2, 3, 4) | |
| Skew angle of four SGCMGs | |
| i-th gimbal angle of the SGCMG (i = 1, 2, 3, 4) | |
| Reference of the state vector | |
| State vector | |
| Reference of the torque vector | |
| Torque vector produced by the angular momentum exchange | |
| Control torque input vector by the controller | |
| Gimbal angular acceleration vector | |
| Reference of the gimbal angular velocity vector | |
| Gimbal angular velocity vector | |
| Control gimbal angle input vector by the controller | |
| Gimbal angle vector | |
| Gimbal angular acceleration error vector | |
| Gimbal angular velocity error vector | |
| Gimbal angle error vector | |
| Target gimbal angle vector | |
| Jacobian matrix of SGCMGs depending on | |
| Jacobian matrix of SGCMGs depending on | |
| Singularity parameter | |
| Quaternion vector of the satellite attitude | |
| Quaternion error vector of the satellite attitude | |
| Time derivative of | |
| Time derivative of | |
| Target angular velocity vector of the satellite | |
| Angular velocity vector of the satellite | |
| Angular velocity error vector of the satellite | |
| Time derivative of | |
| Time derivative of | |
| Moment of inertia matrix of the satellite | |
| Target angular momentum vector of the SGCMG | |
| Angular momentum vector of the SGCMG | |
| Angular momentum error vector of the SGCMG | |
| Angular momentum matrix of the SGCMG wheel | |
| Nonlinear function depending on | |
| Equilibrium point of the system | |
| Control input vector | |
| Infinite-time performance criterion | |
| State-Dependent Weighting matrices | |
| Optimal index | |
| Solution matrix of SDRE | |
| State-Dependent Coefficient (SDC) matrices | |
| Error matrix of | |
| Unit matrix | |
| Coupling matrix between and | |
| Coupling matrix between and | |
| Time constant of gimbal motor | |
| Very small negative scalar | |
| Design parameters of and | |
| Weighting functions of the proposed method | |
| Gimbal angle of SGCMG2 and SGCMG4 when |
References
- Giorgi, G.; Teunissen, P.J.G.; Verhagen, S.; Buist, P.L. Testing a new multivariate GNSS carrier phase attitude determination method for remote sensing platforms. Adv. Space Res. 2010, 46, 118–129. [Google Scholar] [CrossRef]
- Hauschild, A.; Grillmayer, G. GPS Based Attitude Determination for the Flying Laptop Satellite. In Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation (IAA-B6-0601), Berlin, Germany, 23–26 April 2007. [Google Scholar]
- Cornick, D.E. Singularity Avoidance Control laws for single gimbal control moment gyros. In Proceedings of the AIAA Guidance and Control Conference, Denver, CO, USA, 6–8 August 1979; pp. 20–33. [Google Scholar]
- Bedrossian, N.S.; Paradiso, J.; Bergmann, E.V.; Rowell, D. Steering law design for redundant single-gimbal control moment gyroscopes. J. Guid. Control Dyn. 1990, 13, 1083–1089. [Google Scholar] [CrossRef]
- Ford, K.A.; Hall, C.D. Singular direction avoidance steering for control-moment gyros. J. Guid. Control Dyn. 2000, 23, 648–656. [Google Scholar] [CrossRef]
- Wie, B.; Bailey, D.; Heiberg, C.J. Singularity robust steering logic for redundant single-gimbal control moment gyros. J. Guid. Control Dyn. 2001, 24, 865–872. [Google Scholar] [CrossRef]
- Wie, B. Singularity escape/avoidance steering logic for control moment gyro systems. J. Guid. Control Dyn. 2005, 28, 948–956. [Google Scholar] [CrossRef]
- Yu, L.H.; Liu, S.L.; Wang, X.Y.; Huang, L. CMGs-based steering law design for high attitude stability and quick attitude maneuver agile satellite. In Proceedings of the 14th International Conference on Space Operations (AIAA 2016-2553), Daejeon, Korea, 16–20 May 2016. [Google Scholar]
- Leve, F.A.; Fitz-Coy, N.G. Hybrid steering logic for single-gimbal control moment gyroscopes. J. Guid. Control Dyn. 2010, 33, 1202–1212. [Google Scholar] [CrossRef]
- Kanzawa, T.; Haruki, M.; Yamanaka, K. Agile multitarget attitude maneuvers using both torque-producing motion and null motion for gimbal angle control of control moment gyros. In Proceedings of the 57th Space Science and Technology Association Conference (JSASS-2013-4369), Tottori, Japan, 9–11 October 2013. [Google Scholar]
- Kusuda, Y.; Takahashi, M. Design of feedback control system using nominal inputs for satellite attitude maneuver using control moment gyros. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit (AIAA 2009-6205), Chicago, IL, USA, 10–13 August 2009. [Google Scholar]
- Sato, S.; Takahashi, M. Singularity escape of satellite with control moment gyros using path planning of angular momentum. Trans. Jpn. Soc. Mech. Eng. 2013, 79, 303–314. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, Y.; Li, W.; Wang, Y. Path planning for rapid large-angle maneuver of satellites based on the gauss pseudospectral method. Math. Probl. Eng. 2016, 2016, 1–7. [Google Scholar] [CrossRef]
- Tikhonov, A.N. Solution of incorrectly formulated problems and the regularization method. Sov. Math. Dokl. 1963, 4, 1035–1038. [Google Scholar]
- Neumaier, A. Solving ill-conditioned and singular linear systems: A tutorial on regularization. SIAM J. Appl. Math. 1998, 40, 636–666. [Google Scholar] [CrossRef]
- Voronin, S.; Martinsson, P.G. Efficient algorithms for cur and interpolative matrix decompositions. Adv. Comput. Math. 2017, 43, 495–516. [Google Scholar] [CrossRef]
- Mracek, C.P.; Cloutier, J.R. Control designs for the nonlinear benchmark problem via the state-dependent Riccati equation method. Int. J. Robust Nonlinear 1998, 8, 401–433. [Google Scholar] [CrossRef]
- Çimen, T. Survey of state-dependent Riccati equation in nonlinear optimal feedback control synthesis. J. Guid. Control Dyn. 2012, 35, 1025–1047. [Google Scholar] [CrossRef]
- Ozawa, R.; Takahashi, M. Agile attitude maneuver via SDRE controller using CMG integrated satellite model. In Proceedings of the 61th Space Science and Technology Association Conference (JSASS-2017-4420), Niigata, Japan, 25–27 October 2017. [Google Scholar]
- Stansbery, D.T.; Cloutier, J.R. Position and attitude control of a spacecraft using the state-dependent Riccati equation technique. In Proceedings of the American Control Conference, Chicago, IL, USA, 28–30 June 2000; pp. 1867–1871. [Google Scholar]
- Ozawa, R.; Takahashi, M. Vibration control of flexible satellite using the command shaping considering singularity of control moment gyro. In Proceedings of the 60th Space Science and Technology Association Conference (JSASS-2016-4315), Hokkaido, Japan, 6–9 September 2016. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maneuver Axis | Gimbal Steering Number |
|---|---|
| roll | #1 and #3 |
| pitch | #2 and #4 |
| yaw | all SGCMGs |
| roll and pitch | all SGCMGs |
| pitch and yaw | all SGCMGs |
| yaw and roll | all SGCMGs |
| roll, pitch, and yaw | all SGCMGs |
| Parameters | Symbols | Values |
|---|---|---|
| moment of inertia of satellite | kgm2 | |
| angular momentum of SGCMG | 75 Nms | |
| target angular velocity of satellite | deg/s | |
| initial gimbal angle | - | deg |
| target gimbal angle | deg | |
| initial satellite euler angle | - | deg |
| target satellite euler angle | - | deg |
| target gimbal angular velocity | deg/s | |
| target angular momentum | Nms | |
| very small negative scalar | −10−9 | |
| very small positive scalar | 10−5 | |
| time constant of gimbal motor | 0.3 s | |
| skew angle of four SGCMGs | 54.74 deg | |
| Maximum gimbal angular velocity | - | 1 rad/s |
| Evaluation Index | Comparative Method | Proposed Method |
|---|---|---|
| attitude settling time (s) | 56.7 | 52.9 |
| terminal gimbal angle error (degrees) |
| Cases | True Values of the Real Plant (kgm2) |
|---|---|
| (a) | |
| (b) | |
| (c) | |
| (d) | |
| (e) |
| Cases | Attitude Settling Times (s) | Terminal Gimbal Angle Errors (Degrees) |
|---|---|---|
| (a) | 52.9 | |
| (b) | 56.3 | |
| (c) | 56.3 | |
| (d) | 49.7 | |
| (e) | 49.7 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ozawa, R.; Takahashi, M. Agile Attitude Control and Singularity Avoidance/Escape by the SDRE Method Using a Biased State-Dependent Weighting Matrix. Appl. Sci. 2018, 8, 140. https://doi.org/10.3390/app8010140
Ozawa R, Takahashi M. Agile Attitude Control and Singularity Avoidance/Escape by the SDRE Method Using a Biased State-Dependent Weighting Matrix. Applied Sciences. 2018; 8(1):140. https://doi.org/10.3390/app8010140
Chicago/Turabian StyleOzawa, Ryotaro, and Masaki Takahashi. 2018. "Agile Attitude Control and Singularity Avoidance/Escape by the SDRE Method Using a Biased State-Dependent Weighting Matrix" Applied Sciences 8, no. 1: 140. https://doi.org/10.3390/app8010140
APA StyleOzawa, R., & Takahashi, M. (2018). Agile Attitude Control and Singularity Avoidance/Escape by the SDRE Method Using a Biased State-Dependent Weighting Matrix. Applied Sciences, 8(1), 140. https://doi.org/10.3390/app8010140