Performance of Time Reversal Based Underwater Target Detection in Shallow Water


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Target Peak Enhancement Using Time Reversal Processing
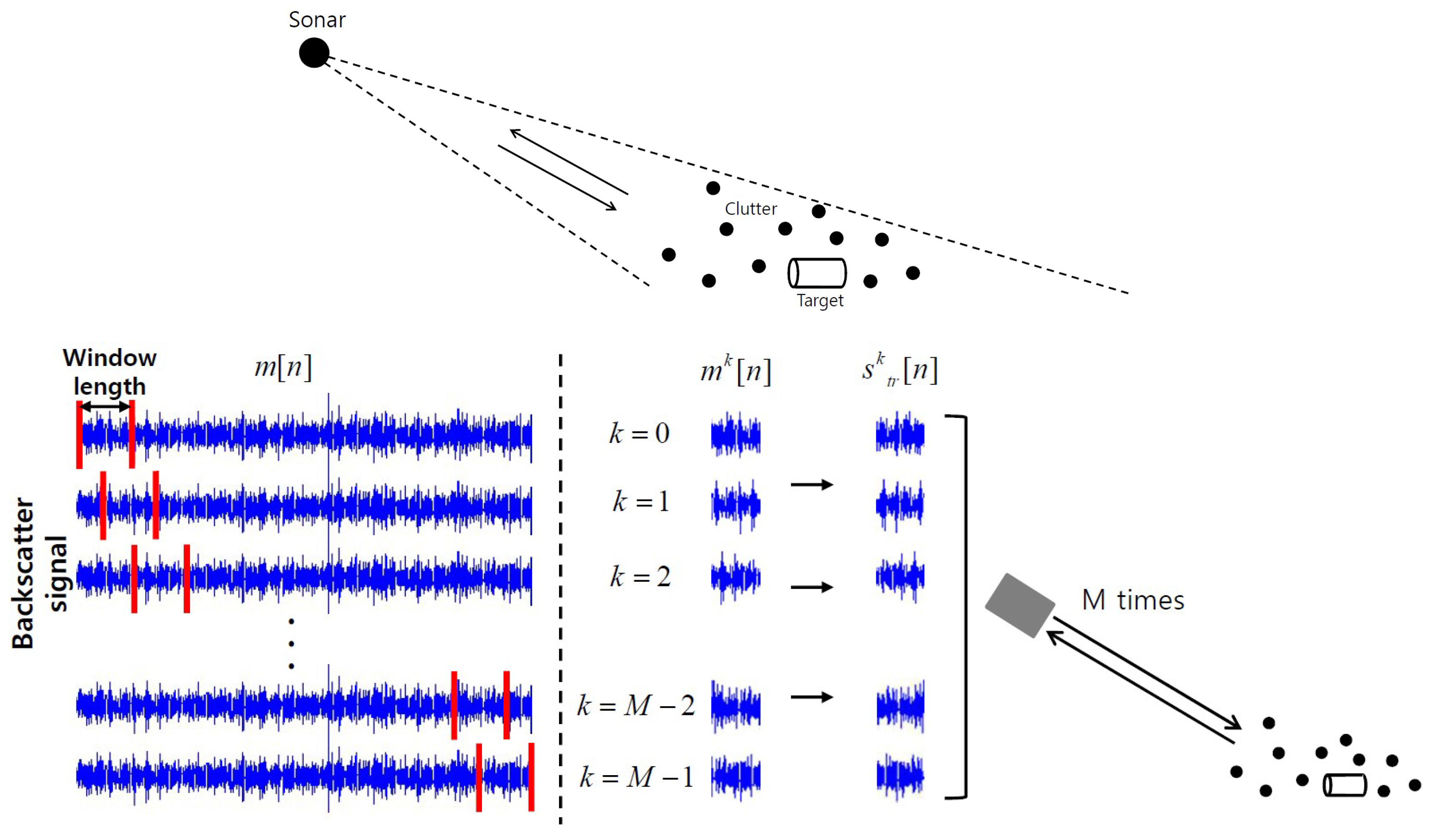
2.1. Concept of the Time Reversal Scheme
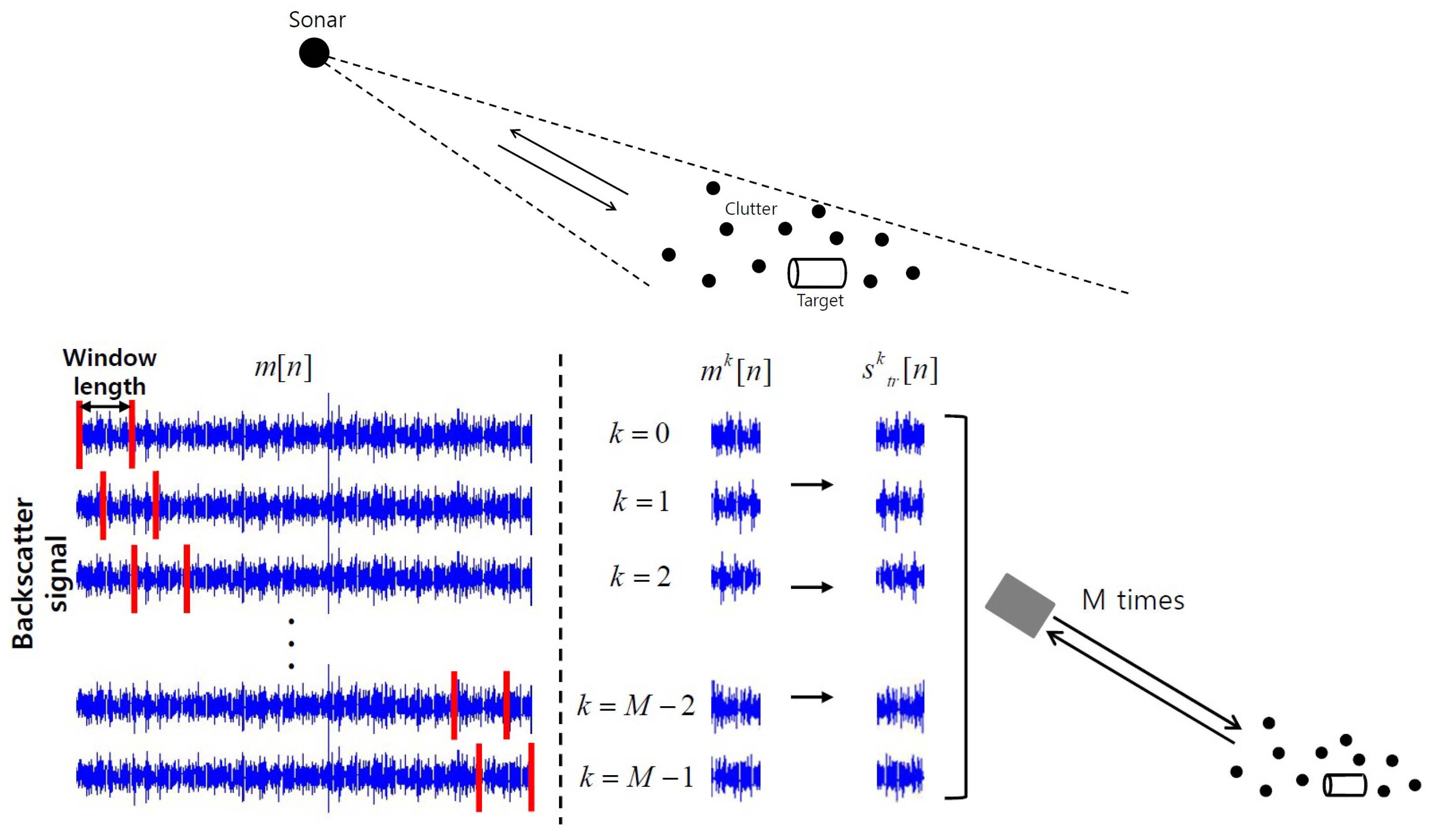
2.2. Time-Reversed Signal Implementation
2.3. Detection Performance Comparison
2.3.1. Conventional Matched Filtering
2.3.2. Time Reversal-Based Detection
3. Target and Clutter Channel Modeling
3.1. Cylindrical Target Channel Modeling
3.2. Clutter Channel Modeling
4. Simulation
4.1. Simulation Condition
4.2. Simulation Results
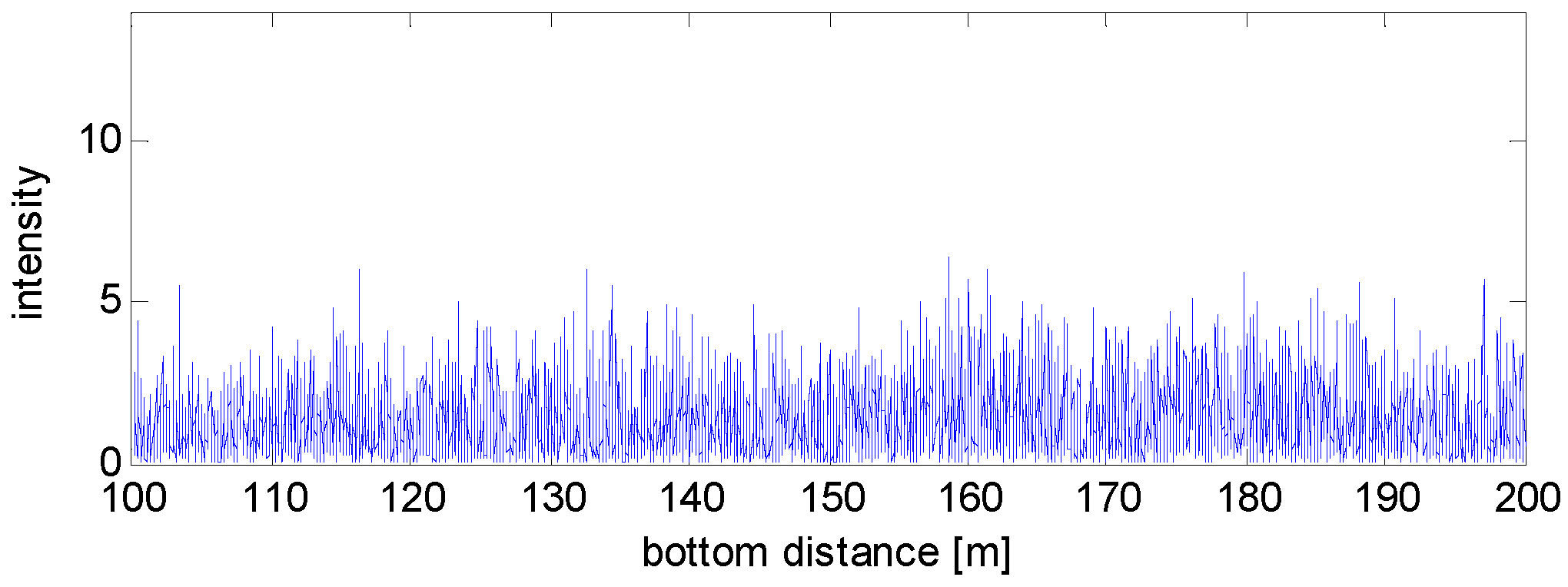
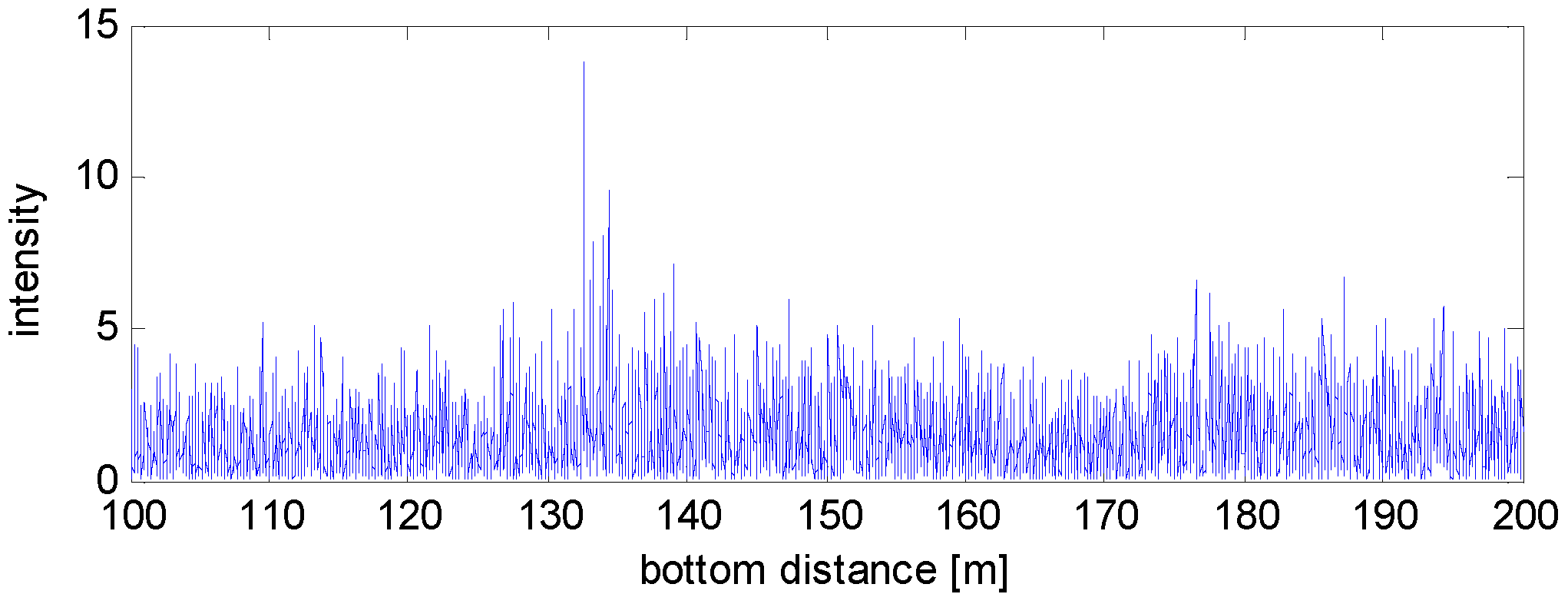
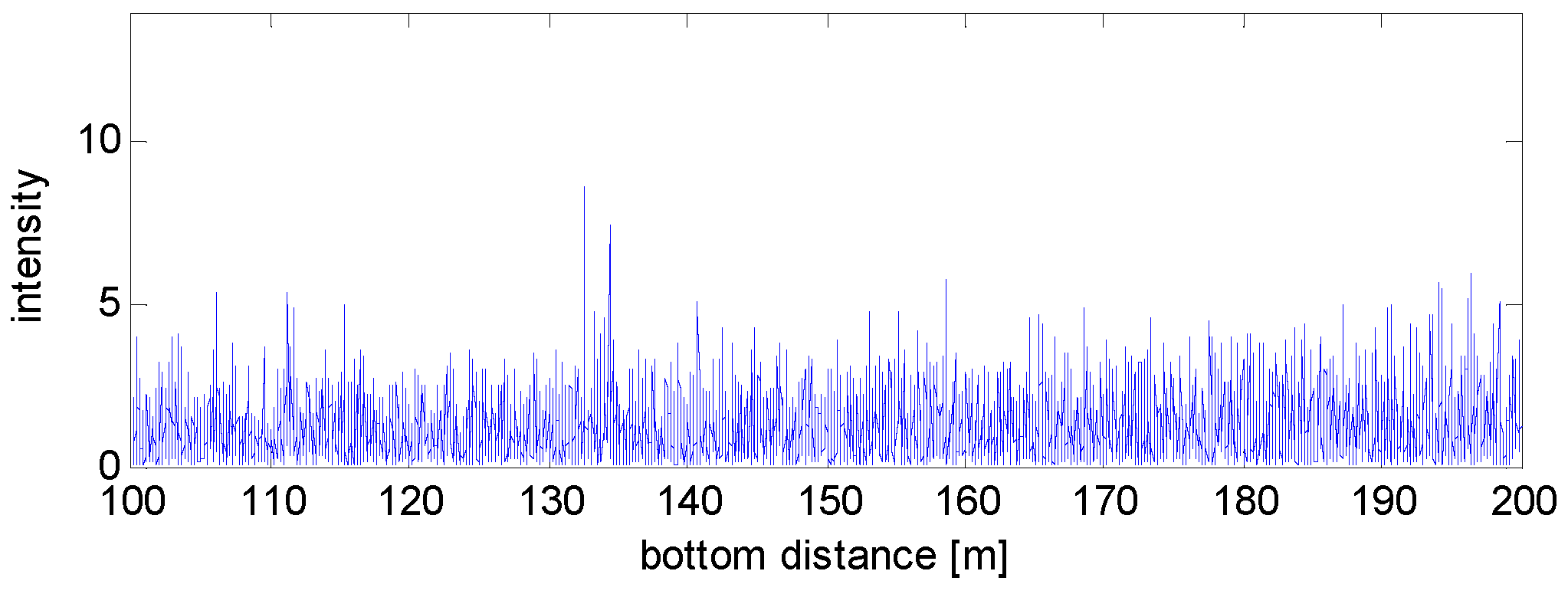
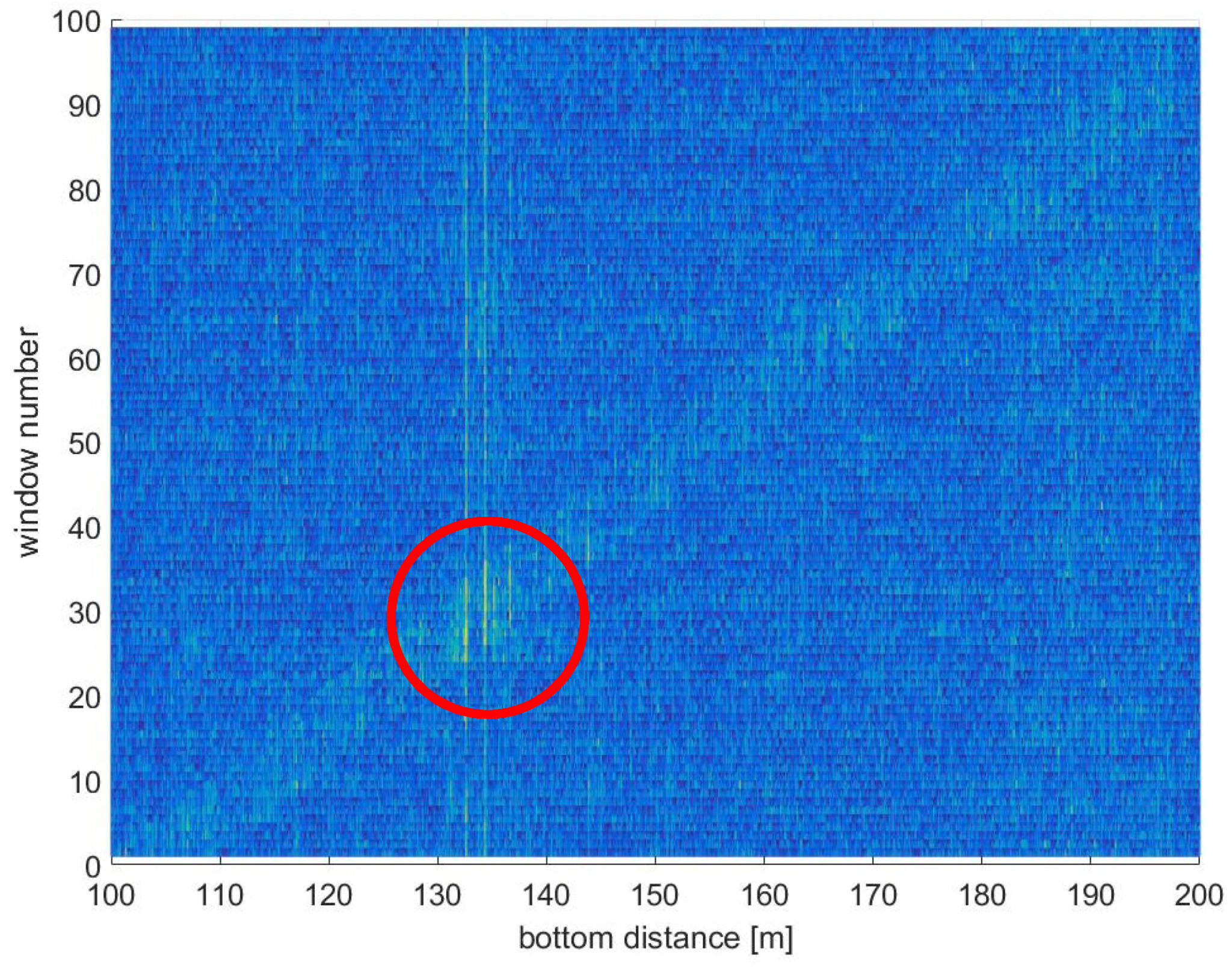
4.2.1. Target Peak Enhancement
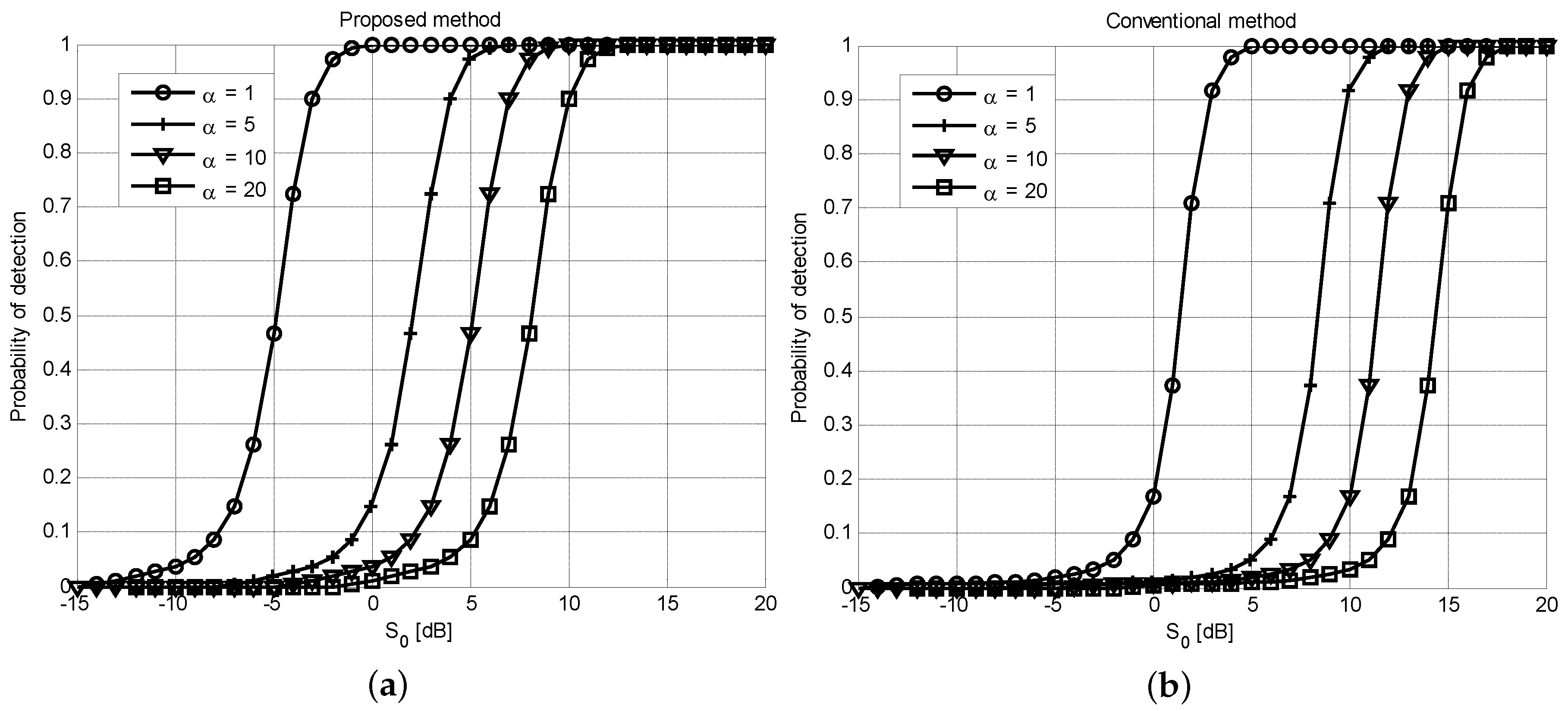
4.2.2. Parameters of the K-Distribution
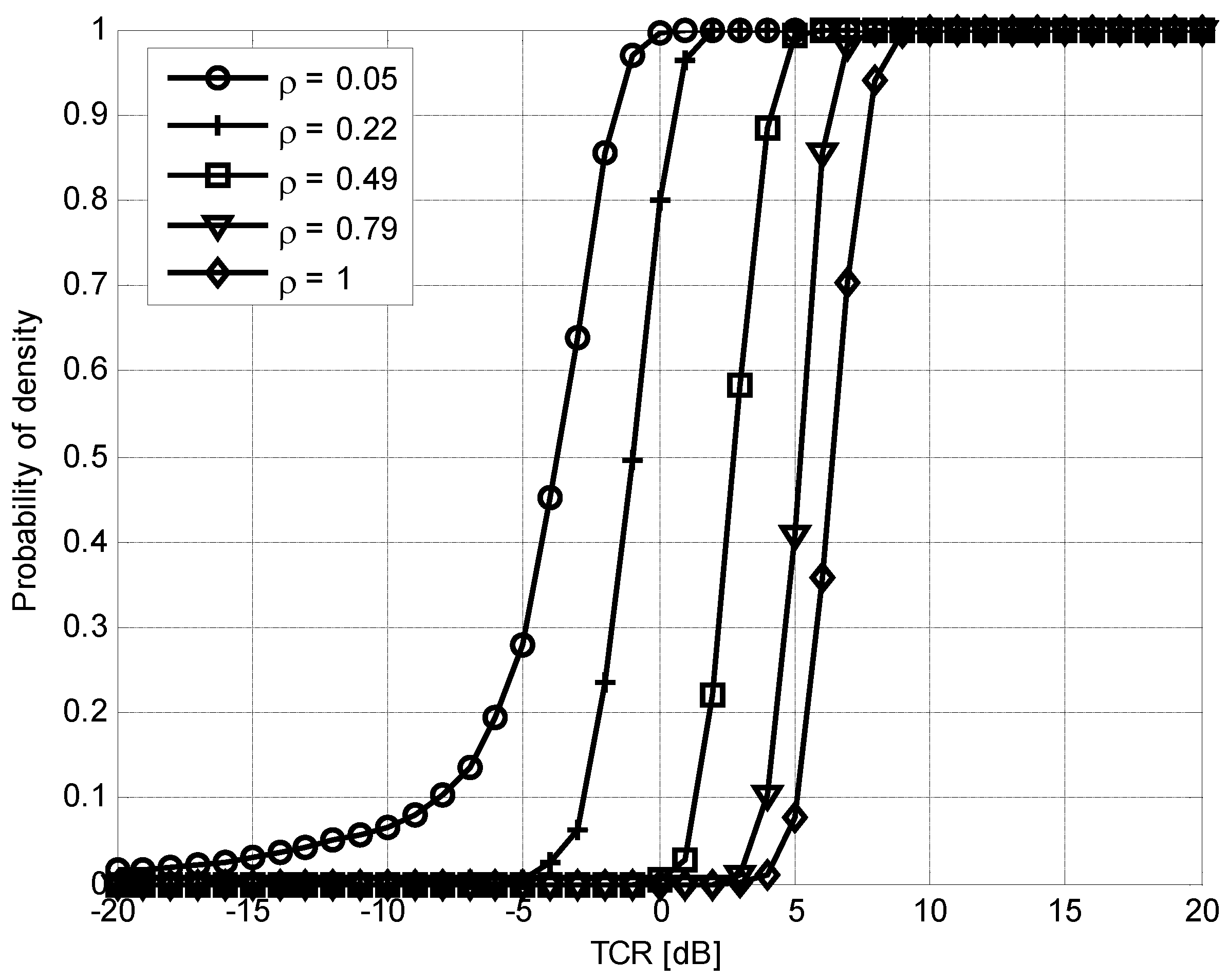
4.2.3. Temporal Coherence
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Johnson, S.G.; Deaett, M.A. The application of automated recognition techniques to side-scan sonar imagery. IEEE J. Ocean. Eng. 1994, 19, 138–144. [Google Scholar] [CrossRef]
- Reed, S.; Petillot, Y.; Bell, J. Automated approach to classification of mine-like objects in sidescan sonar using highlight and shadow information. IEEE Proceed.-Radar Sonar Navig. 2004, 151, 48–56. [Google Scholar] [CrossRef]
- Jeong, E.; Shim, T.; Kim, J. Underwater Acoustic Image Classification of a Cylindrical object using the Hough Transformation and Nth Degree Polynomial Interpolation. J. Inst. Electron. Inf. Eng. 2013, 50, 193–200. [Google Scholar] [CrossRef]
- Lee, J.E.; Shim, T.B. Research on Segmentation for Sidescan Sonar Image by Morphological Method. J. Inst. Electron. Eng. Korea 2012, 49, 143–148. [Google Scholar]
- Kumar, N.; Mitra, U.; Narayanan, S.S. Robust object classification in underwater sidescan sonar images by using reliability-aware fusion of shadow features. IEEE J. Ocean. Eng. 2015, 40, 592–606. [Google Scholar] [CrossRef]
- Williams, K.L.; Kargl, S.G.; Thorsos, E.I.; Burnett, D.S.; Lopes, J.L.; Zampolli, M.; Marston, P.L. Acoustic scattering from a solid aluminum cylinder in contact with a sand sediment: Measurements, modeling, and interpretation. J. Acoust. Soc. Am. 2010, 127, 3356–3371. [Google Scholar] [CrossRef] [PubMed]
- Zampolli, M.; Espana, A.L.; Williams, K.L.; Kargl, S.G.; Thorsos, E.I.; Lopes, J.L.; Kennedy, J.L.; Marston, P.L. Low-to mid-frequency scattering from elastic objects on a sand sea floor: Simulation of frequency and aspect dependent structural echoes. J. Comput. Acoust. 2012, 20, 1240007. [Google Scholar] [CrossRef]
- Shin, H.R. The Characteristics of Coastal Currents to the Northwest of the Taean Peninsula in the Yellow Sea. Ocean Polar Res. 2005, 27, 433–441. [Google Scholar]
- Son, W.; Son, S.U.; Choi, J.W.; Cho, S.; Jung, S.K. Measurements of Monostatic Bottom Backscattering Strengths in Shallow Water of the Yellow Sea. J. Acoust. Soc. Korea 2015, 34, 444–454. [Google Scholar] [CrossRef]
- Howell, H.R.G. Inferring Bottom Acoustic Properties from AN/SQQ-32 Sonar Reverberation Data; Naval Postgraduate School: Monterey, CA, USA, 2000. [Google Scholar]
- Van Walree, P. Channel Sounding for Acoustic Communications: Techniques and Shallow-Water Examples; FFI-Rapport; Norwegian Defence Research Establishment: Kjeller, Norway, 2011; Volume 7, pp. 1–58. [Google Scholar]
- Abraham, D.A.; Lyons, A.P. Simulation of non-Rayleigh reverberation and clutter. IEEE J. Ocean. Eng. 2004, 29, 347–362. [Google Scholar] [CrossRef]
- Vego, M.N. Joint Operational Warfare: Theory and Practice; Government Printing Office: Washington, DC, USA, 2009.
- Abraham, D.A. Distributed active sonar detection in dependent K-distributed clutter. IEEE J. Ocean. Eng. 2009, 34, 343–357. [Google Scholar] [CrossRef]
- Fink, M.; Cassereau, D.; Derode, A.; Prada, C.; Roux, P.; Tanter, M.; Thomas, J.L.; Wu, F. Time-reversed acoustics. Rep. Prog. Phys. 2000, 63, 1933. [Google Scholar] [CrossRef]
- Fink, M.; Prada, C. Acoustic time-reversal mirrors. Inverse Probl. 2001, 17, R1. [Google Scholar] [CrossRef]
- Fink, M. Time-reversal acoustics. J. Phys. Conf. Ser. 2008, 118, 012001. [Google Scholar] [CrossRef]
- Yavuz, M.E.; Teixeira, F.L. Ultrawideband Microwave Sensing and Imaging Using Time-Reversal Techniques: A Review. Remote Sens. 2009, 1, 466–495. [Google Scholar] [CrossRef]
- Berryman, J.G.; Borcea, L.; Papanicolaou, G.C.; Tsogka, C. Statistically stable ultrasonic imaging in random media. J. Acous. Soc. Am. 2002, 112, 1509–1522. [Google Scholar] [CrossRef]
- Fouda, A.E.; Teixeira, F.L. Imaging and tracking of targets in clutter using differential time-reversal techniques. Waves Random Complex Media 2012, 22, 66–108. [Google Scholar] [CrossRef]
- Santos, V.R.N.; Teixeira, F.L. Study of time-reversal-based signal processing applied to polarimetric GPR detection of elongated targets. J. Appl. Geophys. 2017, 139, 257–268. [Google Scholar] [CrossRef]
- Fouda, A.E.; Teixeira, F.L. Statistical Stability of Ultrawideband Time-Reversal Imaging in Random Media. IEEE Trans. Geosci. Remote Sens. 2014, 52, 870–879. [Google Scholar] [CrossRef]
- Li, J.; Pan, X.; Zhao, H. Buried target detection based on time reversal focusing with a probe source. Appl. Acoust. 2009, 70, 473–478. [Google Scholar] [CrossRef]
- Moura, J.M.; Jin, Y. Detection by time reversal: Single antenna. IEEE Trans. Signal Process. 2007, 55, 187–201. [Google Scholar] [CrossRef]
- Simon, M.K.; Omura, J.K.; Scholtz, R.A.; Levitt, B.K. Spread Spectrum Communications Handbook; Access Engineering: McGraw-Hill, NY, USA, 2002; Volume 2. [Google Scholar]
- Yang, T. Measurements of temporal coherence of sound transmissions through shallow water. J. Acoust. Soc. Am. 2006, 120, 2595–2614. [Google Scholar] [CrossRef]
- O’Donoughue, N.; Moura, J.M. Gaussian target detection in multipath clutter with single-antenna time reversal. IEEE Trans. Signal Process. 2013, 61, 3733–3744. [Google Scholar] [CrossRef]
- Abraham, D.A.; Lyons, A.P. Novel physical interpretations of K-distributed reverberation. IEEE J. Ocean. Eng. 2002, 27, 800–813. [Google Scholar] [CrossRef]
- Ye, Z. A novel approach to sound scattering by cylinders of finite length. J. Acoust. Soc. Am. 1997, 102, 877–884. [Google Scholar] [CrossRef]
- Kargl, S.G.; Williams, K.L.; Thorsos, E.I. Synthetic Aperture Sonar Imaging of Simple Finite Targets. IEEE J. Ocean. Eng. 2012, 37, 516–532. [Google Scholar] [CrossRef]
- Kargl, S.G.; Shim, T.; Williams, K.L.; Im, S. Scattering from a finite cylindrical target in a waveguide. In OCEANS 2016 MTS/IEEE Monterey; IEEE Oceanic Engineering Society: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Abraham, D.A.; Lyons, A.P. Reverberation envelope statistics and their dependence on sonar bandwidth and scattering patch size. IEEE J. Ocean. Eng. 2004, 29, 126–137. [Google Scholar] [CrossRef]
- Papoulis, A.; Pillai, S. Probability, Random Variables, and Stochastic Processes; McGraw-Hill Series in Electrical Engineering: Communications and Signal Processing, Tata; McGraw-Hill Education: New York, NY, USA, 2002. [Google Scholar]


© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
On, B.; Im, S.; Seo, I. Performance of Time Reversal Based Underwater Target Detection in Shallow Water. Appl. Sci. 2017, 7, 1180. https://doi.org/10.3390/app7111180
On B, Im S, Seo I. Performance of Time Reversal Based Underwater Target Detection in Shallow Water. Applied Sciences. 2017; 7(11):1180. https://doi.org/10.3390/app7111180
Chicago/Turabian StyleOn, Baeksan, Sungbin Im, and Iksu Seo. 2017. "Performance of Time Reversal Based Underwater Target Detection in Shallow Water" Applied Sciences 7, no. 11: 1180. https://doi.org/10.3390/app7111180
APA StyleOn, B., Im, S., & Seo, I. (2017). Performance of Time Reversal Based Underwater Target Detection in Shallow Water. Applied Sciences, 7(11), 1180. https://doi.org/10.3390/app7111180